PERANCANGAN, PEMBUATAN, DAN IMPLEMENTASI ROBOT
PELUKIS MENGGUNAKAN MIKROKONTROLLER
Puji Waluyo Univeritas Mitra Karya [email protected]
ABSTRAK
Konsep penciptaan lukisan adalah penggambaran robot dimasa depan yang mempunyai sifat-sifat manusia sehingga mereka berinteraksi dalam situasi sosial. Tema pada penciptaan lukisan merupakan personifikasi robot yang terinspirasi dari komik, film animasi dan film fiksi ilmiah. Figur robot pada lukisan merupakan deformasi dari bentuk robot yang telah ada dalam komik, film animasi dan film fiksi ilmiah untuk diubah dan menghasilkan bentuk baru yang berbeda. Proses visualisasi lukisan dikerjakan menggunakan media cat akrilik di atas kanvas dengan teknik opaque dan brushstroke. Robot pelukis ini dapat dikategorikan dalam robot vision karena robot ini menggunakan perangkat kamera dan image processing dalam prosesnya yang didapat dari sebuah perangkat I/O yang berupa informasi warna RGB (red, green, blue).
Kata Kunci : Pembuatan, Implementasi, Robot Pelukis
PENDAHULUAN :
Robot banyak digunakan pada baik pada skala kecil maupun besar, mulai dunia industri sampai pada entertainment sehingga robot dapat difungsikan sebagai pengganti pekerjaan yang seharusnya dikerjakan oleh manusia.
Robot mempunyai kelebihan yang tidak dimiliki oleh manusia yaitu dalam hal kecepatan proses, ketelitian dan tidak adanya unsur kelelahan dalam melakukan sesuatu. Sehingga dalam melakukan proses pada skala besar dapat menggantikan proses manual yang dilakukan oleh manusia dan dapat mempercepat proses yang diinginkan dengan hasil yang lebih baik.
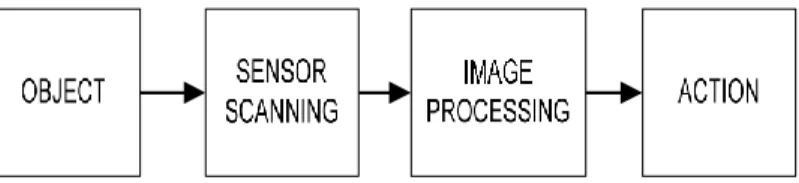
Robot pelukis ini dapat dikategorikan dalam robot vision karena robot ini menggunakan perangkat kamera dan image processing dalam prosesnya yang
didapat dari sebuah perangkat I/O yang berupa informasi warna RGB (red, green,
blue) seperti pada gambar.
Gambar Blok Diagram Robot Vision
Lukisan yang dihasilkan dari robot ini hampir sama dengan hasil dari
printer, hanya saja pada printer media untuk hasil hanya sebatas kertas,
sedangkan pada robot pelukis media yang digunakan bisa disesuaikan, misalnya kertas, dinding, kayu, bahkan robot ini dapat dikembangkan lagi untuk melukis benda tiga dimensi.
Sistem kontrol elektronik mempunyai fungsi sebagai pusat pengendali kegiatan dari alat ini. Adapun permasalahan sistem padaperangkat keras yang akan timbul pada pembuatan robot ini adalah pembuatan perangkat mekanik yang tepat sehingga robot dapat berjalan stabil dan sesuai yang diharapkan. Kemudian pada pembuatan hardware elektronik dimana mencakup driver motor, solenoid, dan sistem minimum. Pada driver motor bagaimana merancang agar dapat bergerak ke kiri dan ke kanan, sedangkan pada driver solenoid diharapkan dapat menarik atau mendorong pena gambar sehingga dapat bergereak naik – turun. Dan juga bagaimana membuat sistem minimum berbasis mikrokontroller agar dapat berfungsi sebagai basis sistem kontrol dengan baik. Selain itu pada software bagaimana mengubah image yang ditangkap robot menjadi sebuah bentuk arsiran, masalah ini tentunya akan mencakup tentang image processing dan video capture. Kemudian bagaimana konversi suatu citra menjadi data yang akan dikirim ke mikrokontroller.
METODOLOGI:
Prosedur dan langkah-langkah dalam pengerjaan penelitian dapat diuraikan sebagai berikut:
a. Tahap studi literature
Studi tentang mikrokontroller, rangkaian driver motor dan solenoid, komunikasi serial (RS-232), perancangan sistem minimum, program Visual Basic untuk visualisasi pada PC, serta literatur-literatur yang lain yang dapat menunjang penyelesaian penelitian .
b. Tahap perancangan dan pembuatan hardware\
Tahap perancangan meliputi pembuatan mekanik robot untuk gerak robot, serta pengaturan gerak motor dan solenoid oleh mikrokontroller, kemudian perancangan sistem minimum untuk menerima data dari komputer sebagai informasi yang dipakai mikrokontroller untuk menggerakkan lengan robot.
c. Tahap pengujian dan simulasi
Hardware yang telah jadi akan disimulasikan dengan mengambil sebuah obyek
tertentu dan mengubahnya dalam format lukisan.
d. Tahap realisasi
Dalam tahap ini kita menghubungkan semua hardware (PC, mikrokontroller, robot, dan kamera) serta mengimplementasikan software didalamnya.
e. Tahap penulisan laporan
Pada tahap ini pekerjaan yang dilakukan adalah penulisan laporan secara lengkap dan detail sesuai dengan data yang diperoleh dari penelitian ini.
PEMBAHASAN
Pada pembuatan "Robot Pelukis" untuk penelitian ini secara umum terbagi menjadi dua bagian pokok, yaitu pembuatan perangkat keras (hardware) dan perangkat lunak (software). Pembuatan perangkat lunak untuk pengolahan citra ini dirancang dengan menggunakan bahasa pemrograman Visual Basic.
Untuk pembuatan perangkat keras yang meliputi pembuatan perangkat mekanik serta perangkat keras elektonik (hardware) akan dibahas pada bab ini yang merupakan pokok bahasan utama dalam penelitian ini. Pembuatan perangkat mekanik terdiri dari desain mengenai konstruksi robot itu sendiri berupa pembuatan kerangka robot yang menggunakan aluminium yaitu pembuatan tubuh robot, penyangga kamera, penyangga pena, serta penyangga motor DC. Kemudian merangkai bagian-bagian tersebut menjadi satu kesatuan yang utuh, rapi, dan bergerak sesuai dengan hasil yang diharapkan.
Sedangkan pembuatan perangkat keras elektronik terdiri dari pembuatan rangkaian sistem minimum mikrokontroller AT89S51 serta downloader dalam sistemnya, penggerak (driver) motor DC, penggerak (driver) solenoid dan rangkaian komunikasi data serial RS232.
Sebagai interface dalam sistem ini digunakan sistem minimum AT89S51 yang akan mengontrol perangkat keras melalui port-port yang tersedia. Port 2 akan digunakan untuk mengontrol kerja dari penggerak motor DC dan penggerak solenoid.
Sistem minimum yang terdapat pada robot ini terbagi atas dua bagian dasar, yaitu bagian perangkat keras (hardware) dan bagian perangkat lunak (software). Sistem minimum ini digunakan sebagai tatap muka (interfacing) dari komputer dengan robot, sistem minimum ini menggunakan mikrokontroller AT89S51 yang merupakan keluaran dari Atmel. Sedangkan untuk perencanaan sistem berdasarkan pada fungsi komunikasi data itu sendiri adalah dengan mengintegrasikan dan menghubungkan antara komputer dengan mikrokontroller. Mikrokontroller menerima masukan melalui komunikasi data serial RS232 untuk menggerakkan motor dc sesuai dengan data yang terkirim.
Data dari komputer yang dikirim melalui komunikasi serial RS232 menuju mikrokontroller akan direalisasikan berupa gerakansecara vertikal dan horisontal sehingga robot dapat menggambar sesuai pola.
Gambar Diagram Blok
Informasi data yang berupa obyek gambar diterima kamera kemudian data informasi tersebut dikirim ke komputer dengan kabel USB (Universal Serial Bus), setelah komputer menerima hasil informasi tersebut maka data informasi tersebut akan di manipulasi di komputer dengan menggunakan metode image processing menjadi suatu data yang diinginkan untuk proses selanjutnya, data yang telah dimanipulasi komputer akan dikirim ke mikrokontroller AT89S51 menggunakan komunikasi serial RS232 untuk di inisialisasi menjadi intruksi data, sebagai intruksi untuk menjalankan driver motor pada robot. Robot ini bergerak secara otomatis sesuai dengan informasi yang diterima dari proses objek yang diterima oleh kamera. Pergerakan robot ini adalah kekiri-kekanan, kebawah-keatas, dan maju-mundur.
Perangkat keras elektronik yang digunakan sebagai interface adalah rangkaian – rangkaian berikut ini yaitu rangkaian penggerak (driver) motor DC, rangkaian penggerak (driver) solenoid serta penggunaan sistem minimum.
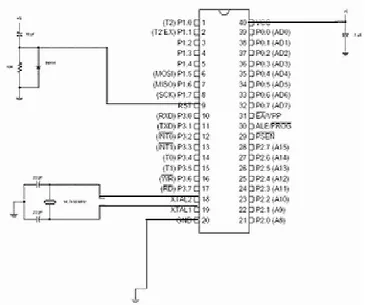
a. Perangkat Mikrokontroler
Pada penelitian ini dibuat piranti penggendali menggunakan mikrokontroler keluaran ATMEL yaitu AT89S51. Untuk mengaktifkan atau menjalankan mikrokontroler ini diperlukan rangkaian minimum sistemRangkaian sistem minimum tersebut terdiri rangkaian reset , rangakaian oscillator rangkaian power supply dan rangkaian sistem mikrokontroler.
- Rangkaian Reset
Reset pada mikrokontroler AT89S51 terjadi dengan adanya logika high “1” selama dua cycle pada kaki RST pada mikrokontroler AT89S51. setelah
kondisi pin RST kembali low, maka mikrokontroler akan menjalankan program dari alamat 0000H.
Rangkaian reset pada penelitian ini seperti gambar
Gambar Rangkaian reset
Rangkaian reset pada gambar diatas merupakan rangkaian reset yang dapat bekerja secara manual maupun otomatis. Pada saat sumber daya diaktifkan maka kapasitor C sesuai dengan sifat kapasitor akan terhubung singkat sehingga arus mengalir langsung dari Vcc ke pin RST.
Kemudian kapasitor akan terisi sehingga tegangan kapasitor Vc akan mencapai tegangan Vcc. Karena nilai Vc sama dengan nilai Vcc maka tegangan di resistor 8K2 dan tegangan pada pin RST menjadi low jika saklar s ditekan , reset mikrokontroler bekerja secara manual. Aliran arus akan mengalir dari Vcc melalui resistor 100 menuju pin RST. Adanya resistor 8K2 menyebabkan adanya pembagi tegangan antara tegangan Vr 8K2 dengan pin RST. Tegangan itu sama dengan
Tegangan VR 8K2 menyebabkan pin RST berlogika high “1” pada saat saklar S ditekan. Saat saklar s dilepas, aliran dari Vcc melalui R 100 akan terhenti sehingga tegangan pada pin RST akan turun menjadi low.
- Rangkaian Osilator
Pin XTAL1 dan XTAL2 merupakan pin osilator bagi mikrokontroler AT89S51. Pin XTAL1 befungsi sebagai input dan XTAL2 sebagai output
osilator. Osilator ini bisa berasal dari kristal atau dari keramik resonator. Untuk osilator kristal, nilai C1 dan C2 adalah 30 Pf ± 10 Pf dan untuk keramik resonator 40 Pf ± 10 Pf
Gambar 3.3 Rangkaian Minimum Osilator
Pada penelitian ini dibuat rangkaian osilator internal yang terbuat dari kristal. Nilai C1 dan C2 masing- masing 30 Pf.
- Rangkaian Minimum Mikrokontroler AT89S51
Untuk menjalankan mikrokontroler AT89S51 dibutuhkan sebuah rangkaian minimum agar mikrokontroler tersebut dapat bekerja dengan baik. Rangkaian minimum mikrokontroler terdiri dari rangkaian reset dan rangkaian osilator.
Pada proyek akhir ini, dibuat rangkaian minimum mikrokontroler agar mikrokontroler dapat bekerja dengan baik. Rangkaian minimum tersebut adalah seperti gambar 3.4 di atas
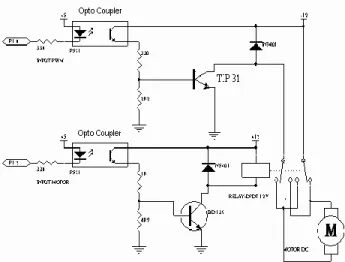
b. Driver Motor dan Solenoid
Pada robot tersebut terdapat 2 motor DC, jadi outputnya berupa driver motor DC dengan system driver maju mundur dan berhenti. Pada perencanaan pembuatan penggerak motor DC ini dipilih beberapa komponen yang mempunyai tegangan yang besar agar motor dapat bergerak secara maksimal sesuai dengan spesifikasi motor yaitu 12V, mempunyai arus yang besar, mempunyai kecepatan
switching yang tinggi. Maka dari itu dibuatlah penggerak motor dengan
komponen yang dapat tahan dengan tegangan pada Vcc yaitu 12V dan arus 5A
Gambar Rangkaian Driver Motor
Pemilihan relay untuk pembalik polaritas motor diguanakan, karena relay merupakan saklar mekanik dan tidak dipengaruhi oleh Vce atau Ib seperti pada transistor. Kemudian dipilih TIP 31 untuk penggerak pada kontak relay untuk mengatur tegangan yang masuk.
Untuk membalik polaritas motor pada relay agar dapat bergerak maju, mundur, kekanan, dan kekiri diperlukan transistor yang dapat tahan terhadap tegangan 12V, maka dipilih transistor BD139 yang terhubung dengan kumparan relay, dengan spesifikasi sebagai berikut:
- VCBO : 80V - VCEO : 80V - VEBO : 5V - IC : 1,5A
-
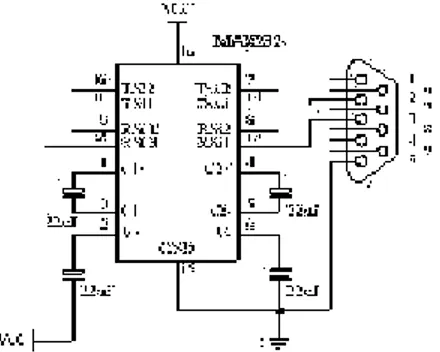
IB : 0,5Ac. Perencanaan komunikasi data serial RS232
Untuk mengaktifkan seluruh kerja sistem sesuai dengan fungsinya perlu dibuat perangkat keras dan perangkat lunak. Perangkat lunak disini yaitu untuk mengatur jalannya data yang dikirim oleh komputer ke mikrokontroller agar data yang terkirim diterima dengan sempurna oleh mikrokontroller. Ada dua perangkat lunak pada komunikasi data yaitu perangkat lunak untuk komunikasi data pada PC dan perangkat lunak untuk komunikasi data pada mikrokontroller.
Dalam proyek akhir ini akan membuat robot otomatis dengan menggunakan komunikasi serial. Pada bagian pemroses gambar dalam hal ini warna terdiri dari kamera web, USB (Universal Serial Bus), komputer sedangkan bagian pengaturan gerak robot terdiri dari rangkaian mikrokontroller dan rangkaian driver sebagai penggerak motor, sedangkan untuk perancangan komunikasi data menggunakan RS 232 sebagai protokolnya.
Dengan perangkat tersebut dapat digunakan untuk mengirimkan data atau karakter dari komputer ke mikrokontroller dengan sempurna
Gambar Rangkaian komunikasi serial RS232
Mekanik robot ini terdiri atas penyangga area gambar, penyangga motor DC, dan penyangga solenoid dan pena. Di sini kondisi robot dibuat tetap atau diam, sehingga yang bergerak adalah dudukan solenoid atau penenya saja berdasarkan arah putaran dari motor dan salah satu lengan yang menopang solenoid.
Untuk menggeser dudukan lengan – lengan robot, dipakai suatu penarik dan jalur dari penarik itu sendiri, dan di sini penarik yang digunakan adalah berupa tali senar yang diikat pada ujung sumbu horisontal sedangkan pada tengah senar diputar melalui gear dari motor. Sehingga bila motor berputar maka motor akan menarik senar dan berjalan di permukaan senar. Untuk konstruksi robot dpat dilihat pada gambar berikut ini.
d. Pengujian dan Analisa
- Pengujian Komunikasi Serial
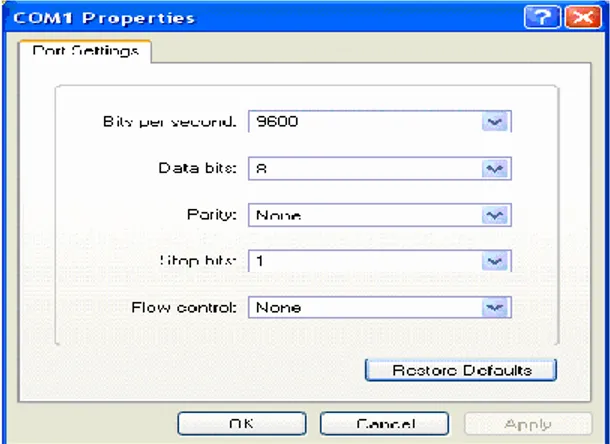
Pada pengujian komunikasi serial, ditampilkan pada Hiperterminal, dimana pengujian ini diharapkan sebagai tanda bahwa komunikasi serial bisa digunakan. Kemudian hasil dan analisa adalah Untuk mengakses hiperterminal kita harus mengatur port settingnya seperti pada gambar dibawah
Gambar Port Setting
Adapun program yang kita gunakan untuk mengakses serial adalah sebagai berikut: baudrate equ 0fDh code_seg equ 0000h PCON EQU 0087H org code_seg ljmp start init: mov scon,#50h
mov th1,#baudrate ;speed 9600 utk 11059200 Hz mov tmod,#21h ;timer1 set mode2, timer0 set mode1 mov tcon,#40h ;enable timer1 disable timer0
ret org 100h start:
mov sp,#10h ;sp=10h lcall init ;inisialisasi loop: mov a,#'A' mov sbuf,a wait: jnb scon.1,wait clr scon.1
sjmp loop ;jika ya loop end
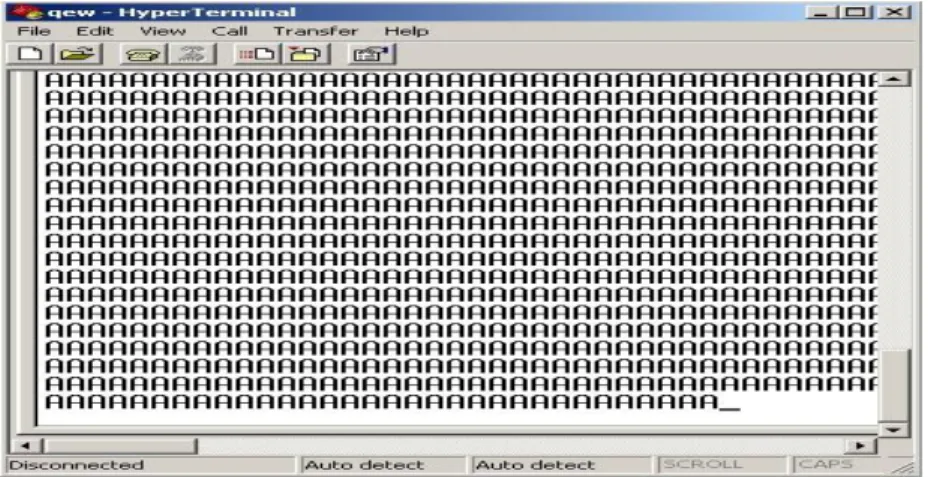
dimana pada hiperterminal menunjukan data sebagai berikut:
Gambar Hyperterminal
Hal ini karena pada program kita memberi perintah pada micro untuk mengirimkan ’A’ ke PC sehingga munculah huruf ’A’ di hiperterminal.
Berdasarkan hasil pengamatan terlihat bahwa pada pengiriman dari micro ke PC bisa dilakukan bila keduanya telah mengalami sinkronisasi, artinya keduanya sudah sama piranti dan baudratenya sehingga dapat berkomunikasi.
-
Pengujian Driver MotorPada pengujian gerak motor, ditampilkan pada motor DC sebagai penggerak untuk mengetahui apakah motor dapat berfungsi sesuai dengan yang diharapkan
loop clr P2.4 clr p2.6 call delay call delay LOOP1: clr p2.5 clr p2.7 call delay call delay setb P2.5 setb p2.7 call delay call delay sjmp LOOP1 delay: MOV R0,#5 del1: MOV R1,#0FFH del2: MOV R2,#00H DJNZ R2,$ DJNZ R1,del2 DJNZ R0, del1 RET END
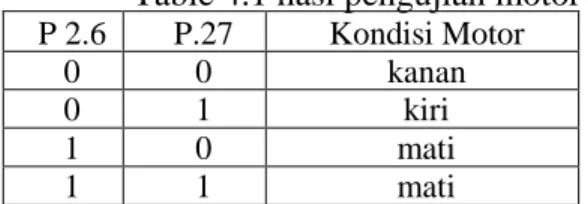
Gerakan yang dihasilkan robot sesuai dengan yang diinginkan yaitu dapat bergerak bolak – balik sesuai dengan program yang dijalankan.
Table 4.1 hasl pengujian motor
P 2.6 P.27 Kondisi Motor
0 0 kanan
0 1 kiri
1 0 mati
1 1 mati
Berdasarkan pengamatan secara langsung torsi yang dihasilkan oleh motor besar, sehingga motor dapat menggerakkan lengan yang membawa penyangga solenoid dan pena. Maka tampak bahwa penggerak (driver) motor DC berjalan dengan baik, mampu untuk diaplikasikan untuk pergerakan.
Dan pada penggerak (driver) motor DC ini akan aktif low dikarenakan jenis dari optocoupler yang digunakan sebagai rangkaian driver.
-
Pengujian Driver SolenoidPada pengujian driver solenoid, ditampilkan pada solenoid sebagai penggerak untuk mengetahui apakah solenoid dapat berfungsi sesuai dengan yang diharapkan dengan analisanya gerakan yang dihasilkan motor sesuai dengan yang diinginkan yaitu dapat bergerak naik turun. Serta driver solenoid menggunakan relay pada rangkaian dapat mengaktifkan solenoid pada saat diberi pulsa pada drivernya. Pada penggerak (driver) solenoid jika diberikan logika ”1”, maka solenoid akan aktif dan di sini solenoid diaplikasikan untuk menarik sedangkan jika diberi logika ”0”, maka solenoid tidak aktif dan diaplikasiakn sebagai pendorong. Kondisi solenoid dan pena dapat dilihat dalam table
Tabel 4.2. Kondisi solenoid dan pena
Trigger Kondisi solenoid Kondisi pena 0 Tidak aktif, mendorong Posisi naik 1 Aktif, menarik Posisi turun
- Pengujian Sistem
Pengujian keseluruhan disini merupakan pengujian yang dilakukan dengan menggabungkan seluruh sistem rangkaian (hardware), sistem mekanik, perangkat lunak (software) dan Image Processing (Software) di computer dengan analisanya adalah
Setelah diuji secara keseluruhan, yaitu dengan menghubungkan robot dengan PC, dimana dari PC mengirimkan data untuk menggerakkan robot dapat berjalan lancar dan sesuai dengan yang diharapkan,meskipun terdapat beberapa kendala yaitu pada penggerak (driver) motor yang agak panas. Namun robot tetap menggambar sesuai dengan data yang dikirimkan Dengan memperhitungkan jarak antara kamera dan objek, maka didapatkan hasil
perbandingan ganbar pola dari robot dengan gambar objek awal seperti pada gambar Dimana yang menjadi acuan disini adalah perbandingan antara ukuran dari hasil gambar yang diperoleh dengan ukuran gambar objek awal.
Gambar Obyek dan Hasil yang digambar
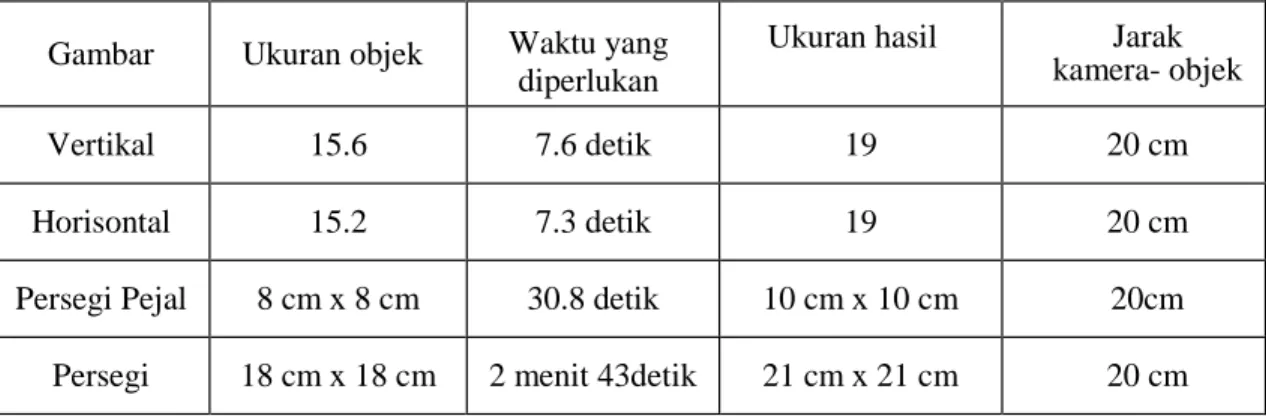
Untuk mendapatkan tingkat ketelitian dari robot dilakukan percobaan berkali-kali. Dan didapatkan hasil pergerakan robot dalam menggambar yang tampak pada tabel di bawah:
Gambar Ukuran objek Waktu yang diperlukan
Ukuran hasil Jarak kamera- objek
Vertikal 15.6 7.6 detik 19 20 cm
Horisontal 15.2 7.3 detik 19 20 cm
Persegi Pejal 8 cm x 8 cm 30.8 detik 10 cm x 10 cm 20cm Persegi 18 cm x 18 cm 2 menit 43detik 21 cm x 21 cm 20 cm
Dari hasil pengujian di atas maka dapat diketahui persentase error seperti pada rumus perhitungan
Error(%) = Ukuran hasil - Ukuran objek x 100 % Ukuran hasil
Error (%) = 19 − 15 . 6 x100 % = 17.89% 19
2. Gambar Horisontal
Error (%) = 19 − 15 . 2 x100 % = 20% 19
3. Gambar Persegi pejal
Error (%) = 10 − 8 x100 % = 20% 10
4. Gambar Persegi
Error (%) = 21 − 18 x100 % = 14.28% 21
Pada alat terlihat bahwa sistem terdapat error yang cukup besar hal ini dikarenakan oleh pemberian besarnya timer yang berakibat pada lamanya motor bekerja untuk menggambar. Semakin besar timer yang diberikan maka semakin besar pula hasil yang akan digambar, begitu pula sebaliknya.
KESIMPULAN:
Dari pengujian perangkat keras pada robot pelukis didapatkan kesimpulan sebagai berikut:
1. Hasil lukisan dari robot bergantung pada:
• Jarak obyek yang akan dilukis dengan kamera. • Besar timer yang dipakai untuk menjalankan robot.
• Pencahayaan yang dapat mempengaruhi konversi ke biner.
2. Pada sistem dalam menggabungkan blok-blok dari sistem harus tepat sehingga sinkronisasi kerjanya bisa terjaga.
DAFTAR PUSTAKA:
1) Agfianto Eko Putra, “Belajar Mikrokontroller T89C51/52/55”, Gava Media, Yogyakarta, 2002.
2) Akhmad Hendriawan, ”Mikrokontroller 8051 Step by Step”, Surabaya, 2004
3) Gde Brata Indrawan, ”Robot Pembersih Kaca Jendela pada Gedung
Bertingkat dengan Kamera”, tugas akhir jurusan Elektronika tahun 2004.
4) Himawan Sutamto, “Pengaturan Kecepatan Motor DC Menggunakan
PI Kontroller”, tugas akhir jurusan Elektronika tahun 2004.
5) Mussa Bahtiar Rifa’i Al-Muhammadiy, ”Robot Penggambar Pola dengan
Kamera”, tugas akhir jurusan Elektronika tahun 2004.
6) Paulus Andi Nalwan, “Teknik Antarmuka dan Pemrograman
Mikrokontroller AT89C51”, Penerbit Alex Media Komputindo, Jakarta,
2003.
7) \Widodo Budiarto, S.Si, M.kom, “Interfacing Komputer dan
Mikrokontroler”, Penerbit Alex Media Komputindo, Jakarta, 2004
8) ……., “datasheet AT89S51”, Atmel, www.alldatasheet.com, diakses tanggal 13-3-2005
9) ……., “datasheet MAX232”, Maxim, www.alldatasheet.com, diakses tanggal 13-3-2005