REKONSTRUKSI MODEL 3D MENGGUNAKAN FOTO UDARA
UNTUK MENDUGA TINGGI OBJEK
HAFZAL HANIEF
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa tesis berjudul Rekonstruksi Model 3D Menggunakan Foto Udara untuk Menduga Tinggi Objek adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
i
RINGKASAN
HAFZAL HANIEF. Rekonstruksi Model 3D Menggunakan Foto Udara untuk Menduga Tinggi Objek. Dibimbing oleh SRI NURDIATI dan DENI SUWARDHI.
Perkembangan teknologi kamera digital non-metrik dan Unmanned Aerial Vehicle (UAV) membuka peluang bagi dunia fotogrametri untuk menghasilkan peta digital 3-Dimensi (3D) dengan biaya yang efektif dan operasional yang lebih mudah. Tujuan penelitian ini adalah merumuskan faktor apa saja yang mempengaruhi dan menentukan ketelitian tinggi objek dari ekstraksi model 3D hasil rekonstruksi. Kamera yang ditempatkan pada UAV dapat menghasilkan citra atau foto udara suatu area di permukaan bumi. Pada pemotretan udara UAV ditempatkan pada posisi tertentu menggunakan sistem autopilot dengan menerapkan teknologi Global Postioning System. UAV diterbangkan pada ketinggian sekitar 50 m, 60 m dan 70 m dengan tujuan untuk mengetahui pengaruh tinggi terbang terhadap akurasi hasil rekonstruksi 3D. Dua atau lebih foto udara yang saling overlap (bertampalan) dapat diolah menjadi model 3D dengan menerapkan prinsip collinearity dan epipolar geometry yang diproses menggunakan algoritme rekonstruksi 3D. Akurasi tinggi objek dari rekonstruksi 3D menggunakan 2 foto dibandingkan dengan rekonstruksi 3D menggunakan 3 foto.
Karena kamera digital non-metrik memiliki ketidakstabilan, maka kalibrasi kamera sebaiknya dilakukan sebelum, pada saat dan setelah pemotretan udara dilakukan agar kualitas ekstraksi spasial yang dihasilkan memiliki akurasi yang baik dan terukur. Penelitian dilakukan menggunakan kamera digital Sony NEX7 yang memiliki resolusi 24 megapiksel. UAV yang dipilih adalah Hexacopter dan rekonstruksi 3D dilakukan menggunakan Camera Calibration Toolbox ditambah program khusus yang dikembangkan dalam MATLAB. Validasi tinggi objek dari model 3D dilakukan dengan membandingkan tinggi objek hasil ekstraksi spasial dengan tinggi objek hasil pengukuran langsung menggunakan Electronic Total Station yang memiliki akurasi dalam fraksi mm. Akurasi tinggi objek yang dapat diperoleh pada penelitian ini mencapai fraksi mm, kesalahan prediksi tinggi terbesar mencapai 15.2 cm pada ketinggian terbang 70 m di atas permukaan tanah dan rata-rata persentase kesalahan relatif sebesar 4.07.
ii
SUMMARY
HAFZAL HANIEF. 3D Model Reconstruction using Aerial Photo to Measure Object Height. Supervised by SRI NURDIATI and DENI SUWARDHI.
3D reconstruction, especially for height extraction, using digital aerial photos taken from a non-metric camera and Unmanned Aerial Vehicle (UAV) is a challenging study. The purposes of the study are to determine the factors affect the accuracy of an object’s height reveal from a 3D model and establish procedures to deliver the optimal result. Two or more overlapping aerial photos can be constructed into the 3D model by applying the principles of collinearity and epipolar geometry using 3D reconstruction algorithm.
Due to the instability of non-metric digital camera, the camera must be calibrated before 3D reconstruction is processed, in that way the quality of spatial extraction can be then measured. The study is conducted using 24 megapixels resolution Sony NEX7 digital camera and Hexacopter UAV. UAV was flown to a height of 50 m, 60 m and 70 m and placed at a certain position in order to get some height variations of camera. Camera Calibration Toolbox is utilized to calculate intrinsik parameters of the camera and a specific program is developed
using MATLAB in order to build the 3D model and to obtain the object’s height.
The result validation is done by comparing the height from 3D model with that
one measured using Electronic Total Station. The accuracy of the object’s height
up to 1 mm successfully achieved, with the largest height prediction error reaches 15.2 cm at 70 m flying height above ground level and average percentage error 4.07 for 20 objects.
© Hak Cipta Milik IPB, Tahun 2013
Hak Cipta Dilindungi Undang-Undang
Dilarang mengutip sebagian atau seluruh karya tulis ini tanpa mencantumkan atau menyebutkan sumbernya. Pengutipan hanya untuk kepentingan pendidikan, penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik, atau tinjauan suatu masalah; dan pengutipan tersebut tidak merugikan kepentingan IPB
Tesis
sebagai salah satu syarat untuk memperoleh gelar Magister Komputer
pada
Program Studi Ilmu Komputer
REKONSTRUKSI MODEL 3D MENGGUNAKAN FOTO UDARA
UNTUK MENDUGA TINGGI OBJEK
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
2013
Judul Tesis : Rekonstruksi Model 3D Menggunakan Foto Udara untuk Menduga Tinggi Objek
Nama : Hafzal Hanief
NIM : G651100374
Disetujui oleh Komisi Pembimbing
Dr Ir Sri Nurdiati, MSc Ketua
Dr Deni Suwardhi, ST MT Anggota
Diketahui oleh
Ketua Program Studi Ilmu Komputer
Dr Yani Nurhadryani, SSi MT
Dekan Sekolah Pascasarjana
Dr Ir Dahrul Syah, MScAgr
iii
PRAKATA
Puji dan syukur penulis panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga karya ilmiah ini berhasil diselesaikan. Tema yang dipilih dalam penelitian yang dilaksanakan sejak bulan Juli 2012 ini ialah ekstraksi spasial, dengan judul Rekonstruksi Model 3D Menggunakan Foto Udara untuk Menduga Tinggi Objek.
Terima kasih penulis ucapkan kepada Ibu Dr Ir Sri Nurdiati, MSc dan Bapak Dr Deni Suwardhi, ST, MT selaku pembimbing, serta Bapak Dr Ir Agus Buono MSi, MKom dan Ibu Dr Yani Nurhadryani, SSi, MT sebagai penguji dan telah banyak memberi saran. Ungkapan terima kasih juga disampaikan kepada istri, anak-anak, bapak, ibu, adik-adik serta seluruh keluarga, atas segala doa dan kasih sayangnya, serta seluruh Dosen dan staf Departemen Ilmu Komputer IPB serta teman-teman di Data dan Geomatika UTC PERTAMINA HULU atas kerja sama dan dukungannya.
Semoga karya ilmiah ini bermanfaat.
iv
DAFTAR ISI
DAFTAR ISI iv
DAFTAR TABEL v
DAFTAR GAMBAR v
1 PENDAHULUAN 1
1.1 Latar Belakang 1
1.2 Perumusan Masalah 2
1.3 Tujuan Penelitian 2
1.4 Manfaat Penelitian 2
1.5 Ruang Lingkup Penelitian 3
2 TINJAUAN PUSTAKA 4
2.1 Close-Range Photogrammetry 4
2.2 Geometri dan Pengambilan Citra Foto Digital 4
2.3 Epipolar Geometry 8
2.4 Resolusi Kedalaman dalam Pengaturan Stereo 9
2.5 Kalibrasi Kamera 11
3 METODE 13
3.1 Studi pustaka 14
3.2 Pengambilan Data 15
3.3 Alat 20
3.3.1 Kamera Digital 20
3.3.2 Multirotor 21
3.3.3 Electronic Total Station 21
3.4 Prosedur Pengolahan dan Analisis Data 23
3.4.1 Kalibrasi Kamera 23
3.4.2 Rekonstruksi 3D 25
4 HASIL DAN PEMBAHASAN 28
4.1 Hasil Kalibrasi Kamera 28
4.2 Hasil Rekonstruksi 3D 34
5 SIMPULAN DAN SARAN 51
DAFTAR PUSTAKA 52
v
DAFTAR TABEL
Tabel 3.1 Ukuran Tinggi Target 18
Tabel 3.2 Data hasil uji coba program 26
Tabel 4.1 Parameter intrinsik hasil tiga kalibrasi 29 Tabel 4.2 Parameter intrinsik kamera hasil kalibrasi dengan mengubah
konfigurasi posisi papan kalibrasi dan menggunakan foto
udara 33
Tabel 4.3 Hasil kalibrasi kamera : 6 set parameter intrinsik 34
Tabel 4.4 Kesalahan titik sekawan 35
Tabel 4.5 Perbedaan tinggi titik sekawan 36
Tabel 4.6 Contoh perbedaan tinggi target T5 hasil rekonstruksi 39 Tabel 4.7 RMS perbedaan tinggi 20 target hasil rekonstruksi 41 Tabel 4.8 Perbedaan tinggi target hasil rekonstruksi 3D dengan
kombinasi jumlah foto dan tinggi terbang 43
Tabel 4.9 Perbedaan tinggi terkecil salah satu target dari 20 target dengan beberapa kombinasi parameter intrinsik, jumlah foto
dan tinggi terbang 44
Tabel 4.10 Perbedaan tinggi terbesar salah satu target dari 20 target dengan beberapa kombinasi parameter intrinsik, jumlah foto
dan tinggi terbang 45
Tabel 4.11 Nilai resolusi kedalaman Rh dari 3 pasang foto dari 3 tinggi
terbang menggunakan 6 parameter intrinsik 47
DAFTAR GAMBAR
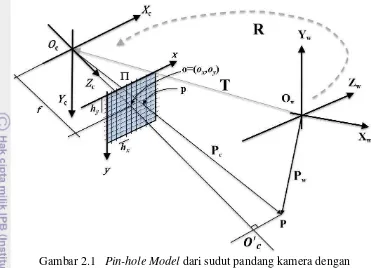
Gambar 2.1 Pin-hole Model dari sudut pandang kamera dengan dua sistem koordinat W (eksternal) dan C (kamera) (Cyganek
dan Siebert,2009) 5
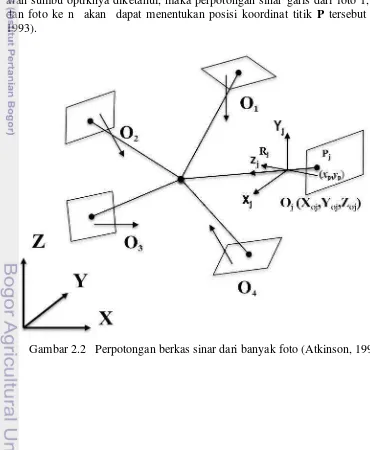
Gambar 2.2 Perpotongan berkas sinar dari banyak foto (Atkinson,
1996) 7
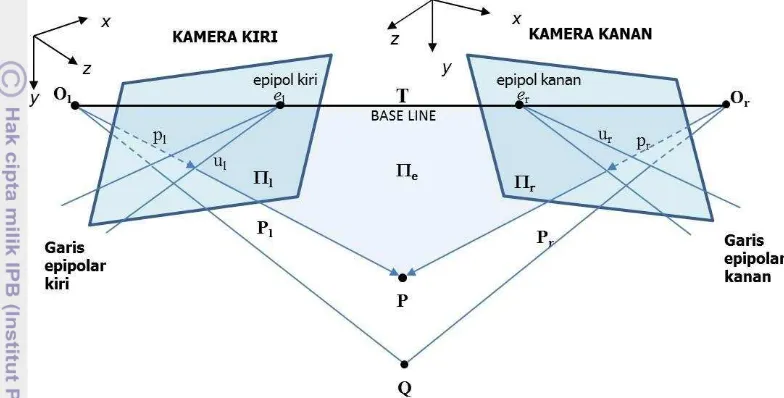
Gambar 2.3 Epipolar Geometry (Cyganek dan Siebert,2009) 8 Gambar 2.4 Fenomena keterbatasan ketelitian dari pengukuran
kedalaman karena bertambahnya jarak objek dari kamera
(Cyganek dan Siebert, 2009) 9
Gambar 2.5 Keterkaitan akurasi pengukuran kedalaman dengan
resolusi kamera (Cyganek dan Siebert, 2009) 10 Gambar 2.6 Gambaran akibat adanya distorsi lensa dan sumbu yang
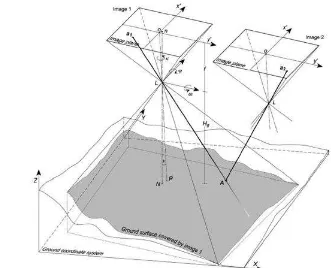
tidak orthogonal atau affine deformation (Pullivelli, 2005) 12 Gambar 3.1 Rekonstruksi koordinat sistem bumi 3D dari sebuah objek
titik dalam sebuah stereo model (Aber et.al., 2010) 13
Gambar 3.2 Diagram alir penelitian 14
Gambar 3.3 Papan kalibrasi 15
Gambar 3.4 Mosaik foto-foto papan kalibrasi dari berbagai posisi
kamera 16
vi
Gambar 3.6 Target 17
Gambar 3.7 Penempatan target 18
Gambar 3.8 Konfigurasi posisi kamera dan pengukuran target 19 Gambar 3.9 Pertampalan beberapa foto udara dengan berbagai variasi
posisi dan tinggi terbang 20
Gambar 3.10 Kamera Sony NEX7 21
Gambar 3.11 Hexacopter DJI Wookong S-800 21
Gambar 3.12 Electronic Total Station Leica TCR 1203 23
Gambar 3.13 Digitasi 4 titik sudut 24
Gambar 3.14 Hasil ekstraksi titik silang kotak hitam-putih di papan
kalibrasi 24
Gambar 3.15 Posisi 2 kamera dan titik-titik merah mewakili titik kotak
hitam-putih pada papan kalibrasi 25
Gambar 3.16 Digitasi setiap target 26
Gambar 4.1 Proses iterasi penentuan titik pojok untuk mendapatkan
kesalahan terkecil 28
Gambar 4.2 Konfigurasi dan posisi kamera pada ketiga kalibrasi 30 Gambar 4.3 Model distorsi hasil kalibrasi pertama 30 Gambar 4.4 Model distorsi hasil kalibrasi ketiga 31 Gambar 4.5 Model distorsi hasil kalibrasi kedua 31 Gambar 4.6 Konfigurasi posisi kamera hasil pemilihan posisi papan
kalibrasi di bidang foto 32
Gambar 4.7 Kenampakan target hasil pemotretan dari UAV 36 Gambar 4.8 Grafik perbedaan tinggi 20 target menggunakan 2 foto 37 Gambar 4.9 Grafik perbedaan tinggi 20 target menggunakan 3 foto 37 Gambar 4.10 Rekonstruksi menggunakan 2 dan 3 Foto 41 Gambar 4.11 Grafik perbedaan tinggi pada beberapa target 43
Gambar 4.12 Hasil ANOVA Dua Arah 48
Gambar 4.13 Boxplot persentase kesalahan relatif tinggi target terhadap
parameter intrinsik 49
Gambar 4.14 Boxplot persentase kesalahan relatif tinggi target terhadap
1
1
PENDAHULUA
N
1.1 Latar Belakang
Pada Close-Range Photogrammetry (CRP), ekstraksi spasial dari hasil pengolahan foto udara digital 2D menjadi model 3D dapat dimanfaatkan untuk mendapatkan informasi spasial, khususnya pada komponen vertikal/tinggi/kedalaman suatu objek yang terdapat pada foto tersebut. Kajian tentang berapa ketelitian tinggi suatu objek atau beda tinggi antara dua objek tertentu yang dapat dihasilkan dari model 3D merupakan topik yang menarik. Oleh karena itu penelitian tersebut perlu dilakukan karena akan memberikan manfaat pada aspek teori dan aplikasi tertentu.
Penelitian yang pernah dilakukan terkait pemanfaatan foto digital sudah banyak dilakukan dengan berbagai tujuan dan aplikasi. Pemodelan tanaman, identifikasi kematangan buah, pengenalan pola daun, dan klasifikasi tanaman, merupakan beberapa contoh pengembangan teknologi dalam pemrosesan foto digital dalam aplikasi pertanian, namun penelitian-penelitian tersebut belum menyinggung aspek spasial. Hanifa (2007) lebih spesifik meneliti tentang aplikasi CRP menggunakan kamera digital auto-focus dan low-cost untuk mendeteksi deformasi suatu objek, suatu kajian spasial tetapi tidak pada komponen tinggi. Khalil (2011) meneliti tentang pengukuran pergeseran horizontal 2D (dx,dy) dengan statik CRP dan kamera tunggal, tetapi tidak pada komponen tinggi. Zhou et.al. (2008) melakukan penelitian untuk merekonstruksi pohon jagung menggunakan teknik fotogrametri, tetapi lebih fokus pada ekstraksi karakteristik pohon jagung. Kirscht dan Rinke (1998) melakukan penelitian dengan merekonstruksi bangunan dan vegetasi menggunakan citra Synthetic Aperture Radar (SAR), penelitian ini sudah masuk pada aspek spasial tetapi tidak menggunakan foto udara.
Fotogrametri dikenal lebih dulu dibanding CRP. Fotogrametri konvensional memanfaatkan foto yang diperoleh melalui pemotretan udara menggunakan kamera metrik dan diambil menggunakan wahana pesawat terbang. Pada fotogrametri konvensional posisi kamera terhadap objek dikondisikan sedemikian rupa sehingga pada posisi relatif orthogonal, sedangkan pada CRP foto diperoleh dari kamera digital low-cost, non-metric, dan posisi kamera terhadap objek lebih bebas dan bervariasi. Salah satu faktor lain yang membedakan fotogrametri dan CRP adalah jarak kamera ke objek. Jarak kamera ke objek pada CRP lebih dekat dibanding pada fotogrametri. Jarak kamera ke objek pada CRP tidak lebih dari 300 m. Fotogrametri lebih banyak diterapkan pada pemetaan permukaan bumi, sedangkan CRP lebih banyak bidang penerapan, seperti pemodelan bangunan/arsitektur, kecelakaan kendaraan, rekonstruksi wajah, pemetaan skala besar dan masih banyak aplikasi di bidang lainnya. Karena dengan metode CRP objek dapat didekati sampai jarak beberapa meter, maka foto digital pada CRP akan memiliki skala yang besar, detil, dan cakupan yang sangat terbatas, sedangkan objek pada fotogrametri memiliki skala lebih kecil, kurang detil, tetapi memiliki cakupan yang luas.
2
direkonstruksi menjadi model 3 dimensi (3D). Rekonstruksi model 3D dari foto digital dapat dilakukan jika terdapat dua foto digital atau lebih yang mempunyai beberapa objek yang sama tetapi diambil dari posisi kamera yang berbeda. Dari model 3D tersebut dapat diperoleh satu informasi penting berupa kedalaman atau ketinggian suatu objek yang ada pada kedua foto. Ekstraksi ketinggian inilah yang akan menjadi fokus penelitian yang akan dilakukan.
1.2 Perumusan Masalah
Rekonstruksi model 3D dari dua atau lebih foto digital melibatkan algoritme yang kompleks dan computational intensive. Ada tiga tahap utama yang harus dilakukan, yaitu : kalibrasi kamera, rekonstruksi model 3D dan pengujian hasil. Pada dua tahap utama tersebut akan diterapkan algoritme collinearity , epipolar geometry dan triangulasi. Pengujian hasil dilakukan dengan membandingkan tinggi objek hasil rekonstruksi dengan tinggi objek hasil pengukuran lapangan sehingga dapat menjawab beberapa pertanyaan berikut : Apa saja syarat foto digital 2D yang dapat dibuat menjadi model 3D sehingga objek pada foto dapat diduga tingginya? Faktor apa saja yang mempengaruhi ketelitian? Berapa ketelitian yang di dapat? Pertanyaan-pertanyaan tersebut yang dicoba untuk dijawab dalam penelitian ini.
1.3 Tujuan Penelitian
Penelitian ini bertujuan untuk :
1. Merumuskan faktor apa saja yang mempengaruhi hasil ekstraksi spasial pada tahapan rekonstruksi model 3D dari foto udara menggunakan kamera non-metrik.
2. Menentukan tinggi objek dari ekstraksi model 3D dan menilai tingkat akurasi yang dapat diperoleh, yaitu dengan cara membandingkan tinggi objek hasil ukuran langsung dengan tinggi hasil rekonstruksi 3D.
1.4 Manfaat Penelitian
Hasil dari penelitian ini diharapkan akan diperoleh manfaat antara lain : 1. Dapat disusun suatu prosedur/urutan langkah-langkah yang dapat
direkomendasikan terkait pemanfaatan dan pengolahan lanjut dari foto udara digi-tal hasil kamera low-cost. Prosedur mulai dari perencanaan, pengambilan data, pemrosesan menggunakan algoritme tertentu, hingga mendapatkan ekstraksi tinggi dengan akurasi yang terukur.
3
1.5 Ruang Lingkup Penelitian
Pada penelitian ini ditetapkan ruang lingkup pembahasan antara lain :
1. Foto digital yang akan digunakan adalah foto digital dari kamera non-metrik yang diperoleh dengan memposisikan kamera sedemikian rupa sehingga posisinya relatif orthogonal terhadap objek. Foto digital yang diproses merupakan foto digital dari hasil pemotretan udara menggunakan pesawat tanpa awak yang terbang dengan ketinggian tidak lebih dari 100 m dari permukaan tanah.
2. Pengukuran tinggi/beda tinggi objek dilakukan menggunakan alat Electronic Total Station (ETS) yang akan memberikan akurasi tinggi hingga 1 mm. 3. Pembahasan pokok penelitian dititikberatkan pada penerapan proses kalibrasi
kamera dan rekonstruksi model 3D. Kemudian hasilnya dianalisis akurasi spasial yang dihasilkan dan faktor apa saja yang mempengaruhinya. Pada penelitian ini digunakan algoritme kalibrasi kamera yang sudah ada dan faktor apa saja yang mempengaruhi hasil dan memberikan ketelitian terbaik pada ekstraksi tinggi suatu objek.
4
2
TINJAUAN PUSTAKA
2.1 Close-Range Photogrammetry
Photogrammetry (Fotogrametri), tersirat dari makna katanya, adalah teknik mengukur koordinat 3-dimensi yang menggunakan foto sebagai media pokok untuk metrologi (atau pengukuran). Lebih ilmiah pengertian fotogrametri didefinisikan sebagai seni, ilmu dan teknologi untuk memperoleh informasi tentang objek fisik dan lingkungan melalui proses perekaman, pengukuran, dan penafsiran foto udara (Thomson dan Gruner, 1980).
Istilah Close Range (Rentang Dekat) Photogrammetry (Fotogrametri) berawal karena teknik ini digunakan untuk objek-objek yang jaraknya kurang dari 300 meter dari posisi kamera. Kamera dan prosedur analisis fotogrametri terestris dimulai pada akhir abad ke 19 oleh seorang Kolonel Perancis, Aime Laussedat. Prinsip dasar fotogrametri sampai saat ini tetap sama. Perkembangan teknologi fotografi, kamera digital dan komputer meningkatkan efektifitas waktu dan tingkat akurasi (Leitch, 2002).
Prinsip dasar CRP menggunakan prinsip dasar triangulasi. Foto diambil dari dua posisi yang berbeda, sehingga kondisi line of sight dapat dikembangkan dari masing-masing kamera ke titik-titik pada objek tertentu. Kondisi line of sight (penjalaran berkas sinar) secara matematis dijelaskan dengan konsep collinearity condition (kondisi kolinearitas ) atau kondisi kesegarisan berkas sinar yang akan diuraikan pada pembahasan berikutnya.
2.2 Geometri dan Pengambilan Citra Foto Digital
Cyganek dan Siebert (2009) menguraikan sebuah Pin-hole Model untuk menjelaskan kondisi kolinearitas dari sebuah sistem kamera dan suatu objek pada Gambar 2.1. Pada Gambar 2.1 diperlihatkan sebuah ilustrasi dari sebuah model dan hubungan geometrik yang memperlihatkan bagaimana berkas sinar yang menghubungkan titik P dalam ruang (3D) atau dunia nyata (bumi) dengan titik p pada citra foto digital yang merupakan bidang 2D, serta sebuah sistem koordinat kamera (3D) yang berpusat pada titik tengah lensa kamera Untuk memahami bagaimana titik-titik di dunia nyata terhubungkan dengan titik-titik pada foto digital, maka perlu diperhatikan dua sistem koordinat berikut (Gambar 2.1) : 1. Sistem koordinat bumi (ditulis dengan notasi ‘W’ mewakili dunia nyata) yang
tidak terkait dengan posisi dan parameter kamera.
5
Jika koordinat titik P = [X,Y,Z]T pada sistem koordinat W(ekternal) dan p = [x,y,z]T pada sistem koordinat C(kamera) dan karena sumbu optik tegak lurus dengan bidang foto, maka dengan mempertimbangkan Ocpo dan OcPO’c adalah sebangun sehingga z = f pada sistem koordinat kamera (Xc,Yc,Zc), selanjutnya akan diperoleh persamaan berikut :
Gambar 2.1 Pin-hole Model dari sudut pandang kamera dengan dua sistem koordinat W (eksternal) dan C (kamera) (Cyganek dan Siebert,2009)
Beberapa bagian penting dari Gambar 2.1 adalah :
a) Titik Oc, disebut titik pusat dari titik fokus (focal point), bersamaan dengan sumbu Xc,Yc,Zc menentukan suatu sistem koordinat kamera. b) Bidang citra foto dinotasikan dengan
c) Principal Point dari koordinat lokal bidang foto ditulis dengan o(ox,oy).
d) Jarak antara bidang foto dan titik Oc disebut panjang fokus (focal length ).
e) Nilai hx dan hy menentukan ukuran sebuah piksel
(2.1) Keterangan :
: koordinat titik dalam sistem koordinat kamera
X,Y,Z : koordinat titik dalam sistem koordinat bumi
6
Persamaan (2.1) merupakan dasar dari sebuah Pin-hole Camera Model yang dapat didefinisikan jika diketahui dua set parameter, yaitu :
1. Parameter ekstrinsik, adalah semua parameter geometris yang diperlukan untuk menghubungkan sistem koordinat luar dengan sistem koordinat kamera yang terdiri atas matriks rotasi R dan translasi T.
2. Parameter intrinsik, adalah parameter yang terkait dengan sistem kamera yang terdiri atas panjang fokus (f), parameter yang memetakan sistem koordinat kamera ke dalam sistem koordinat foto yang terdiri atas o(ox,oy), hx
dan hy, serta parameter terkait distorsi geometrik yang disebabkan oleh
komponen optik dari kamera.
Pada saat foto diambil oleh kamera, maka berkas sinar dari objek akan menjalar berupa garis lurus menuju pusat lensa kamera hingga mencapai sensor digital. Kondisi yang ditunjukkan oleh Gambar 2.1 yaitu titik objek pada dunia nyata (Ground Point P), titik objek pada foto (titik p) dan titik pusat proyeksi (O) terletak pada satu garis dalam ruang dinamakan kondisi kesegarisan.
Pada fotogrametri, posisi dari sebuah objek pada ruang didefinisikan pada sistem koordinat kartesian 3D. Sedangkan objek pada foto didefinisikan pada sistem koordinat berkas (foto). Oleh karena itu perlu dilakukan transformasi koordinat dari sistem berkas ke sistem 3D atau sistem tanah. Pusat dari sistem koordinat berkas merupakan pusat dari lensa kamera.
Menurut Atkinson (1996) persamaan kesegarisan sesuai Gambar 2.1 adalah :
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
(2.2) Keterangan :
f : principal distance (panjang fokus)
, : koordinat titik p pada sistem koordinat foto
: posisi titik pusat kamera dalam sistem koordinat bumi
: posisi titik p dalam sistem koordinat bumi
7
Untuk melakukan rekonstruksi model 3D maka kondisi kesegarisan harus dibangun menggunakan minimal dua foto yang bertampalan, oleh karena itu persamaan kesegarisan (2.2) di atas dikembangkan menjadi (Atkinson, 1996) :
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
(2.3) Jika terdapat sejumlah j foto dan terdapat i titik pada setiap foto maka berlaku persamaan kesegarisan di atas. Gambar 2.2 menunjukkan konsep space intersection atau interseksi pada ruang, yaitu perpotongan beberapa berkas sinar pada objek yang sama di dunia nyata. Oleh karena itu, jika ada sebuah titik P di lapangan yang dapat diamati pada 2(dua) atau lebih foto yang berbeda, maka setiap foto akan mendapatkan bayangan titik tersebut. Apabila posisi kamera dan arah sumbu optiknya diketahui, maka perpotongan sinar garis dari foto 1, foto 2 dan foto ke n akan dapat menentukan posisi koordinat titik P tersebut (Wolf, 1993).
8
2.3 Epipolar Geometry
Epipolar Geometry adalah suatu kondisi model matematik yang harus dipenuhi oleh sepasang foto yang bertampalan untuk dapat membangun hubungan suatu titik objek di dunia nyata dengan titik foto, sehingga visualisasi model yang berkoordinat 3D dapat ditentukan dengan perhitungan matematik.
Gambar 2.3 merupakan ilustrasi yang memperlihatkan hubungan geometrik dari sebuah sistem pengambilan foto untuk menghasilkan model stereo. Gambar tersebut terdiri atas dua pin-hole camera, kiri (l) dan kanan(r).
Gambar 2.3 menunjukkan adanya suatu epipolar constraint, yaitu : setiap titik pi pada foto yang merupakan objek dari titik P pada ruang nyata akan terletak pada bidang foto hanya pada sebuah garis epipolar tertentu yang bersesuaian.
Vektor Pl = [Xl,Yl,Zl]T dan Pr = [Xr,Yr,Zr]T merupakan vektor yang menunjuk pada titik yang sama pada ruang 3D, yaitu titik P. Selain itu pada masing-masing bidang foto terdapat vektor pl= [xl,yl,zl]T dan pr= [xr,yr,zr]T yang merupakan letak titik P. Tambahannya dapat dicatat bahwa zl = fl, zr = fr dan fl adalah panjang fokus kamera kiri dan fr adalah panjang fokus kamera kanan.
Telah diuraikan di atas bahwa setiap kamera akan mempunyai nilai-nilai parameter masing. Parameter tersebut menentukan posisi dari masing-masing kamera pada sistem koordinat luar. Selanjutnya hubungan antara dua sistem koordinat kamera dapat dilakukan dengan melakukan translasi T = Or - Ol dan rotasi yang ditentukan oleh sebuah matriks orthogonal R, oleh karena itu, menurut Cyganek dan Siebert (2009) berlaku persamaan-persamaan berikut :
(2.4)
Gambar 2.3 Epipolar Geometry (Cyganek dan Siebert,2009) Keterangan gambar :
OlOr : baseline
e : epipolar plane (bidang epipolar)
9
Bidang epipolar e dalam sistem koordinat foto kiri berkaitan dengan dua vektor T dan Pl, dengan demikian Pl – T juga termasuk pada bidang tersebut. Hal ini berarti berlaku :
(2.5)
2.4 Resolusi Kedalaman dalam Pengaturan Stereo
Gambar 2.4 menjelaskan suatu fenomena dari berkurangnya akurasi pengukuran kedalaman dengan semakin bertambahnya jarak objek dari kamera. Hal ini adalah suatu kondisi yang terjadi akibat keterbatasan geometris karena secara khusus tergantung pada parameter geometris dari sistem stereo.
Akurasi kedalaman juga tergantung pada resolusi kamera dan jarak ke objek yang digambarkan dengan melakukan analisis terhadap Gambar 2.5.ABC sebangun dengan ADF, begitu juga dengan AEF sebangun dengan AHG, dengan demikian diperoleh hubungan :
̅̅̅̅
̅̅̅
̅̅̅̅̅̅̅
̅̅̅̅̅
̅̅̅̅
̅̅̅
10
Untuk memudahkan perlu dibuat simbol lain, yaitu :
̅̅̅̅ ̅̅̅̅ ̅̅̅̅ ̅̅̅̅ ̅̅̅̅
Diperoleh
̅̅̅̅ ̅̅̅̅
Kemudian dengan penyederhanaan
Akhirnya akan diperoleh rumus :
(2.26)
Dengan mengasumsikan bahwa fb/Z jauh lebih besar daripada resolusi piksel r, akan diperoleh nilai pendekatan
(2.27)
Analisis terhadap (2.26) dan (2.27), kesimpulan yang dapat diperoleh adalah persamaan (2.26) benar jika memenuhi kondisi :
11
fb
≠
rH.
Secara gradual Z akan mendekati nilai
resolusi pengukuran kedalaman nilai Rh mendekati tak terhingga. Pada
kebanyakan sistem pengambilan foto, nilai r, b dan f adalah konstan, setidaknya pada pengambilan tunggal. Hal ini berarti bahwa ada suatu kondisi sebuah nilai Z yang tidak memungkinkan untuk mengukur kedalaman terkait keterbatasan geometri dari pengaturan kamera stereo.
2.5 Kalibrasi Kamera
Foto yang dihasilkan dari kamera non-metrik memiliki beberapa kesalahan yang diakibatkan oleh lensa yang tidak sempurna. Remondino dan Frasser (2006) menyatakan bahwa kalibrasi kamera perlu dilakukan untuk menentukan parameter internal kamera atau biasa juga disebut parameter intrinsik yang terdiri atas : principal distance (f ), titik pusat fidusial foto (o(ox,oy)), distorsi lensa (K1, K2, K3,
P1, P2 ) serta distorsi akibat perbedaan penyekalaan dan ketidakorthogonalan
antara sumbu X dan Y pada sistem koordinat foto.
Distorsi lensa dapat menyebabkan bergesernya titik pada foto dari posisi sebenarnya, sehingga memberikan ketelitian pengukuran yang tidak baik, tetapi tidak mempengaruhi kualitas ketajaman citra yang dihasilkan. Distorsi lensa dibagi menjadi distorsi radial dan distorsi tangensial.
Koreksi akibat distorsi radial dan tangensial menggunakan persamaan berikut (Brown, 1971) :
(X,Y,Z) : koordinat titik pada sistem koordinat kamera
(u,v) : koordinat titik proyeksi pada sistem koordinat berkas/foto
(fx,fy) : panjang fokus
12
P1, P2 : koefisien distorsi tangensial
β : koefisien sudut antara sumbu x dan y
Gambar 2.6 memvisualisasikan distorsi objek karena ketidaksempurnaan lensa kamera.
13
3
METODE
Fokus penelitian ini adalah melakukan rekonstruksi model 3D dengan memproses foto udara digital. Foto yang dapat direkonstruksi menjadi model 3D adalah dua atau lebih foto yang diambil dari posisi berbeda tetapi memiliki objek yang sama (overlap). Gambar 3.1 mengilustrasikan foto udara yang dapat direkonstruksi menjadi model 3D.
Prinsip rekonstruksi adalah melakukan perhitungan matematik menggunakan algoritme rekonstruksi 3D. Gambar 3.1 memperlihatkan bahwa dari koordinat titik a1 dan a2 pada sistem koordinat foto , berkas sinar ditelusuri ulang melalui pusat proyeksi L ke objek titik A. Rekonstruksi dapat dilakukan dengan syarat parameter intrinsik pada bidang foto, dan parameter ekstrinsik (koordinat dan rotasi ) dari L (kamera) harus diketahui.
14
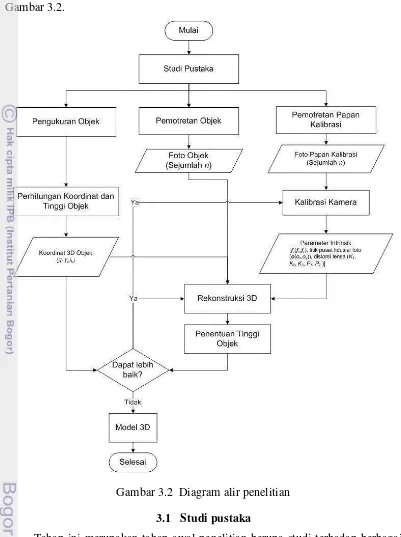
Metode penelitian yang dilakukan dapat dilihat dalam diagram alir pada Gambar 3.2.
3.1 Studi pustaka
Tahap ini merupakan tahap awal penelitian berupa studi terhadap berbagai literatur dari buku referensi, disertasi, tesis, jurnal, laporan penelitian, artikel, dan termasuk situs internet. Seluruh informasi yang diperoleh dari studi pustaka memberikan bekal pengetahuan, teori dasar, penelitian sebelumnya yang pernah dilakukan yang terkait dengan penelitian yang akan dilakukan, tahapan kerja, algoritme yang sudah tersedia, sampai dengan hasil, analisis, dan sintesis yang ada. Semua itu sangat bermanfaat dan beberapa menjadi acuan bagi penelitian ini.
15
3.2 Pengambilan Data
Ada dua pekerjaan utama yang dilakukan pada penelitian ini yaitu kalibrasi kamera dan rekonstruksi 3D. Pada setiap pekerjaan tersebut perlu dilakukan pengambilan data yang berbeda yang disesuaikan dengan kebutuhan masing-masing.
Keperluan untuk kalibrasi kamera
Pada tahap kalibrasi kamera tujuan utama adalah untuk mendapatkan parameter intrinsik kamera. Pada penelitian ini kalibrasi kamera dilakukan dengan metode kalibrasi di lapangan, yaitu dengan menggunakan papan kalibrasi yang dibuat khusus yang disesuaikan dengan syarat ditentukan oleh Camera Calibration Toolbox.
Pembuatan Papan Kalibrasi
Papan kalibrasi dibuat seperti Gambar 3.3.
Pada Gambar 3.3(a) objek kotak hitam-putih seperti papan catur dicetak pada kertas berukuran 112 cm X 112 cm. Setiap kotak dibuat dengan ukuran 3 cm X 3 cm. Koordinat 4(empat) pojok kotak terluar adalah O(0.0), 1(108,0), 2(108,108), 3(0.108) dalam satuan centimeter (cm). Ukuran tersebut bukan ukuran mutlak. Kemudian kertas ditempelkan pada multipleks dengan tujuan untuk mendapatkan permukaan yang datar. Pada Gambar 3.3(b) ukuran kotak dibuat 5 cm dengan ukuran kertas 150 cm x 100 cm. Dua buah papan kalibrasi dengan ukuran berbeda tersebut dibuat dengan tujuan untuk melakukan perbandingan hasil kalibrasi dan pengaruh yang mungkin ditimbulkan karena ukuran yang berbeda.
Pemotretan papan kalibrasi
Beberapa faktor perlu dipertimbangkan ketika pemotretan papan kalibrasi untuk mendapatkan parameter intrinsik kamera antara lain :
1) Papan kalibrasi ditempatkan pada posisi yang memungkinkan untuk dapat dipotret dari berbagai sudut/posisi kamera
2) Pemotretan dilakukan dengan berbagai posisi kamera terhadap papan kalibrasi seperti Gambar 3.4. Selain posisi, variasi jarak kamera ke papan kalibrasi saat memotret juga dilakukan.
(a) (b)
16
3) Foto seperti Gambar 3.3 yang memuat utuh sebuah papan kalibrasi dalam satu foto sulit diperoleh karena panjang fokus lensa 16 mm yang digunakan pada kamera termasuk jenis lensa bersudut lebar dan ukuran papan kalibrasi yang relatif kecil. Foto-foto tersebut penting untuk menentukan parameter intrinsik. Agar foto-foto yang akan digunakan sebagai data masukan dalam perhitungan parameter intrinsik kamera melingkupi semua sudut lensa, maka dilakukan pemotretan dengan menempatkan objek papan kalibrasi di berbagai bidang foto (Gambar 3.5.
4) Untuk mendapatkan hasil terbaik dilakukan pemotretan yang memenuhi kriteria butir 2) dan 3) diatas sehingga dalam 1(satu) sesi pemotretan diperoleh banyak foto hingga mencapai lebih dari 40 foto. Jumlah tersebut diperoleh dari kombinasi posisi kamera, jarak kamera dan penempatan papan kalibrasi pada bidang foto.
5) Pemotretan untuk kalibrasi dilakukan dalam 3(tiga) sesi pemotretan pada waktu yang berbeda. Pemotretan dilakukan sebelum dan sesudah pemotretan udara dilakukan yang bertujuan untuk mengetahui pengaruh penggunaan kamera pada UAV terhadap parameter intrinsik.
Gambar 3.5 Penempatan kamera dan papan kalibrasi pada bidang foto
17 Keperluan untuk rekonstruksi 3D
Setelah tahap kalibrasi kamera dilakukan, maka untuk dapat melakukan rekonstruksi 3D diperlukan data lainnya, yaitu : dua atau lebih foto udara yang mempunyai pertampalan pada objek yang akan diukur dan koordinat 3D objek tersebut dalam sistem bumi dan foto. Koordinat objek dalam sistem bumi diperoleh dari pengukuran lapangan. Koordinat objek dalam sistem foto diperoleh dengan melakukan digitasi. Foto udara diperoleh dari pemotretan udara menggunakan Multirotor.
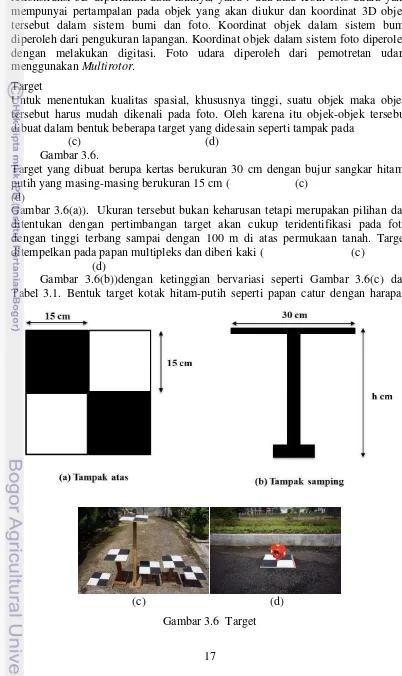
Target
Untuk menentukan kualitas spasial, khususnya tinggi, suatu objek maka objek tersebut harus mudah dikenali pada foto. Oleh karena itu objek-objek tersebut dibuat dalam bentuk beberapa target yang didesain seperti tampak pada
(c) (d)
Gambar 3.6.
Target yang dibuat berupa kertas berukuran 30 cm dengan bujur sangkar hitam-putih yang masing-masing berukuran 15 cm ( (c) (d)
Gambar 3.6(a)). Ukuran tersebut bukan keharusan tetapi merupakan pilihan dan ditentukan dengan pertimbangan target akan cukup teridentifikasi pada foto dengan tinggi terbang sampai dengan 100 m di atas permukaan tanah. Target ditempelkan pada papan multipleks dan diberi kaki ( (c)
(d)
Gambar 3.6(b))dengan ketinggian bervariasi seperti Gambar 3.6(c) dan Tabel 3.1. Bentuk target kotak hitam-putih seperti papan catur dengan harapan
(c) (d)
18
dapat dikenali difoto dengan baik dan dapat ditentukan koordinat titik silang di tengah dengan mudah dan dapat diidentifikasi menggunakan algoritme corner finder. Tinggi target dibuat bervariasi dengan tujuan untuk dapat dianalisis apakah ada pengaruh tinggi objek terhadap akurasi nilai ketinggian hasil rekonstruksinya dengan hasil ukuran menggunakan ETS dalam fraksi ukuran tertentu.
Pengambilan Data Lapangan
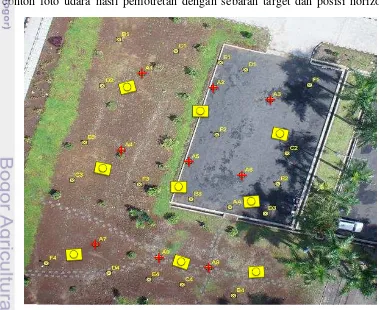
Pengambilan data di lapangan direncanakan dengan mempertimbangkan beberapa hal terkait proses rekonstruksi 3D foto udara sehingga dapat dilakukan rekonstruksi berkas sinar, pembuatan model 3D dan ekstraksi spasial, khususnya tinggi objek yang dapat diukur tingkat akurasinya. Oleh karena itu dibuat konfigurasi posisi dan tinggi terbang seperti pada Error! Reference source not ound. yang mempertimbangkan konfigurasi penempatan target berbentuk grid, target di berbagai posisi di lapangan. Gambar 3.7 memperlihatkan salah satu contoh foto udara hasil pemotretan dengan sebaran target dan posisi horizontal
Gambar 3.7 Penempatan target Tabel 3.1 Ukuran Tinggi Target No Target Tinggi (cm) Jumlah
1 To1-To9 ± 1 9
2 T10 ± 1 1
3 T11-T13 ± 10 3
4 T14-T17 ± 20 4
5 T18-T21 ± 30 4
6 T22-T25 ± 50 4
19
kamera saat pemotretan. Salah satu tujuannya adalah untuk mengetahui pengaruh parameter intrinsik pada titik tertentu terhadap nilai tinggi objek hasil rekonstruksi.
Pekerjaan pengambilan data di lapangan terdiri atas dua kegiatan utama, yaitu :
a. Pemotretan udara
Foto udara diperoleh dengan menempatkan kamera pada Unmanned Aerial Vehicle (UAV)/pesawat tanpa awak. UAV digunakan berupa multirotor yang dapat terbang pada posisi dan ketinggian tertentu dan dikendalikan dari darat menggunakan Romote Control (RC), oleh karena itu konfigurasi posisi kamera dengan variasi tinggi terbang seperti pada Error! Reference source not found. an variasi horisontal sepert Gambar 3.7 (kamera warna kuning) dapat dilakukan. Pada saat pemotretan, lensa kamera diatur pada auto-focus mode dengan tujuan agar diperoleh hubungan dengan pengaturan fokus saat kalibrasi kamera. Beberapa foto hasil pemotretan menggunakan UAV yang saling bertampalan dan berisi target lengkap serta diperoleh dari variasi tiga tinggi terbang diperlihatkan pada Gambar 3.9.
b. Pengukuran dan perhitungan koordinat dan tinggi target.
Foto udara yang dapat diproses dan direkonstruksi menjadi model 3D adalah foto udara yang memiliki minimal 6 titik sekawan pada foto ke 1 dan foto ke 2 (atau ke n). Keenam titik sekawan tersebut memiliki koordinat pada sistem foto dan sistem bumi. Penentuan koordinat 3D setiap target pada sistem bumi dilakukan menggunakan alat Electronic Total Station (ETS) dengan metode radial. Koordinat titik referensi BM 1 (Error! Reference source not found.) dan
20
rientasi arah Utara ditentukan menggunakan Receiver GPS tipe navigasi Garmin Map 60csx.
Hasil pengukuran ETS dan GPS tersebut adalah koordinat (X,Y,Z) setiap target dalam sistem bumi. Nilai X dan Y yang dipakai koordinat pada sistem Universal Transvers Mercator (UTM) zone 48 South dalam Datum WGS84. Nilai Z adalah nilai tinggi target yang mengacu pada elevasi altimeter pada receiver GPS tersebut di atas. Koordinat dan tinggi target hasil pengukuran ETS dianggap bebas dari kesalahan, sehingga digunakan sebagai acuan perhitungan atau pembanding dengan hasil rekonstruksi 3D dan kemudian dilakukan analisis.
3.3 Alat
Peralatan yang digunakan dapat dikelompokan menjadi 3 unit utama, yaitu kamera digital, multirotor, dan Electronic Total Station (ETS).
3.3.1Kamera Digital
Kamera digital low-cost yang digunakan memiliki spesifikasi teknis sebagai berikut :
a) Kamera : Sony NEX7
b) Ukuran CCD : 23.5 x 15.6 mm c) Efektif CCD : 24.0 MP
d) Resolusi Foto : 6000 x 4000 piksel
e) Format file : JPG
f) Lensa : Sony 16 mm dan terpasang filter UV Gambar 3.9 Pertampalan beberapa foto udara dengan berbagai
21
Jenis kamera ini dipilih karena memiliki dimensi yang cukup kecil dan berat yang relatif ringan. Hal tersebut penting terkait dengan kemampuan daya angkat UAV. Selain itu, kamera tersebut memiliki resolusi sensor CCD yang besar yaitu 24 Megapixel, termasuk yang terbesar dibandingkan dengan kamera lain yang sekelas. Pemotretan menggunakan kamera ini dapat dilakukan menggunakan remote control dengan menambahkan peralatan tambahan berupa Infra Red (IR) shutter.
3.3.2Multirotor
Wahana terbang tanpa awak atau UAV yang digunakan memiliki spesifikasi sebagai berikut :
a) Jenis UAV : Hexacopter DJI S-800 b) Controller : DJI Wookong M c) Radio Control : JR PROPO DSX11
d) Perangkat lunak : DJI WookongM Assistant 1.32 & Ground Station 4.0.6
3.3.3Electronic Total Station
Electronic Total Station (ETS) adalah sebuah alat ukur jarak dan sudut. ETS mengukur jarak suatu target dari tempat ETS didirikan menggunakan gelombang Infra Red (IR). Dari ukuran jarak dan sudut akan diperoleh perbedaan koordinat dua titik pada arah horizontal (dx,dy) dan perbedaan tinggi dua titik tersebut. Untuk mendapatkan koordinat suatu titik pada sistem UTM maka perlu diketahui dulu koordinat minimal 1 titik referensi. Titik referensi itulah yang
Gambar 3.10 Kamera Sony NEX7
22
ditentukan koordinatnya dalam sistem UTM menggunakan GPS Garmin 60csx. Spesifikasi ETS yang digunakan adalah :
23 c) Sudut
Akurasi Hz,V : 3”
Resolusi Tampilan : 1” d) Jarak
Akurasi : 1 mm + 1.5 ppm
Resolusi tampilan : 0.1 mm
e) Prisma : GPR1
f) Perlengkapan lain : Tripod, Tribrach, Target, Pita ukur g) Perangkat lunak : Leica Geo Office 4.0
3.4 Prosedur Pengolahan dan Analisis Data
Pada dasarnya tahap pengolahan data yang diakukan pada penelitian dapat dibagi menjadi 2 tahap, yaitu : pengolahan data untuk menentukan parameter intrinsik kamera dengan melakukan kalibrasi kamera dan rekonstruksi untuk membangun suatu model 3D dengan menentukan parameter ekstrinsik kamera dan perhitungan triangulasi untuk menentukan koordinat 3D objek.
Analisis data terkait dengan faktor-faktor yang mempengaruhi akurasi tinggi objek hasil rekonstruksi dilakukan dengan metode statistik ANOVA Dua Arah. Metode statistik tersebut dipakai untuk melihat pengaruh masing-masing faktor dan apakah ada interaksi antar faktor.
3.4.1Kalibrasi Kamera
Program komputer utama yang digunakan untuk menentukan parameter intrinsik adalah Camera Calibration Toolbox yang ditulis dalam MATLAB yang dibuat oleh Jean-Yves Bouguet (2010). Beberapa algoritme harus dimodifikasi terkait dengan pengelolaan memory komputer, besarnya ukuran, format file foto dan alur program.
Tahapan pengolahan data untuk mendapatkan parameter intrinsik kamera yang digunakan adalah sebagai berikut :
1) Membaca satu per satu semua file foto berformat JPG yang berisi papan kalibrasi dan menampilkannya dengan sistem koordinat masing-masing foto. 2) Menentukan 4 titik pojok di papan kalibrasi dengan melakukan digitasi pada
area tertentu (area titik 1-4 pada Gambar 3.13).
24
3) Menentukan koordinat titik pojok kotak hitam-putih pada sistem koordinat foto.
Program akan melakukan penentuan koordinat titik-titik silang/sudut kotak hitam-putih menggunakan algoritme Harris corner finder.
Keterangan :
adalah titik hasil Harris corner finder yang pendekatannya dari digitasi secara manual.
: tanda + adalah titik hasil ekstraksi setiap pojok kotak hitam-putih dan kotak biru adalah ukuran jendela sebagai batas pencarian yang menjadi masukan ke program Harris corner finder.
Dengan demikian pada setiap foto yang menggunakan papan kalibrasi dengan ukuran kotak 3 cm akan diperoleh 1369 koordinat titik-titik pojok kotak kalibrasi dalam sistem koordinat foto/berkas Selain itu koordinat 1369 titik
Gambar 3.13 Digitasi 4 titik sudut
(a) (b)
25
tersebut juga pada papan kalibrasi telah diketahui koordinatnya dalam sistem bumi, yaitu titik 1(0.0)cm, 2(3,0)cm, 3(6,0)cm, dan seterusnya sampai dengan titik 1368(105,108)cm, dan 1369(108,108)cm. Untuk papan kalibrasi yang kotaknya berukuran 5 cm akan terdapat 551 titik yang koordinatnya dalam sistem bumi adalah 1(0.0)cm, 2(5,0)cm, 3(10.0)cm, dan seterusnya sampai dengan titik 550(140.85)cm, dan 551(140.90)cm.
Dua set koordinat titik-titik sudut kotak hitam-putih pada papan kalibrasi dalam sistem foto dan koordinat bumi merupakan data masukan untuk menghitung parameter intrinsik. Jadi jika terdapat 40 foto papan kalibrasi maka akan terdapat 40 x 1369/551 koordinat titik yang menjadi data masukan yang akan diolah bersama-sama dengan 1369/551 koordinat titik pada sistem bumi.
3.4.2Rekonstruksi 3D
Setelah parameter intrinsik kamera dapat ditentukan melalui kalibrasi kamera, maka tahap selanjutnya adalah rekonstruksi 3D. Rekonstruksi 3D pada dasarnya adalah proses :
1) merekonstruksi posisi dan orientasi kamera saat pemotretan setiap foto, 2) menghitung parameter ekstrinsik relatif antara dua atau lebih kamera dan 3) menghitung koordinat 3D objek.
Algoritme rekonstruksi 3D dibuat dalam MATLAB dengan menerapkan prinsip kesegarisan dan Epipolar Geometry sehingga diperoleh posisi relatif satu kamera terhadap kamera lainnya, selanjutnya koordinat 3D target dalam sistem bumi dapat dihitung dengan menerapkan triangulasi stereo setiap objek pada foto yang saling bertampalan.
Untuk menilai program dalam menghitung nilai tinggi target apak sudah valid atau belum, maka program tersebut diuji coba dengan menggunakan data 2 buah foto tertentu yang dipilih dan yang telah digunakan pada perhitungan kalibrasi kamera untuk menentukan parameter intrinsik. Hasilnya diperlihatkan pada Tabel 3.2.
Visualisasi rekonstruksi posisi kamera saat pemotretan dan sebaran titik-titik target papan kalibrasi diperlihatkan pada Gambar 3.15.
26
Pada uji coba program data masukan yang digunakan adalah koordinat 551 titik pada sistem foto dan sistem bumi. Koordinat 551 titik pojok kotak hitam-putih ditentukan menggunakan algoritme corner finder dan koordinat titik-titik tersebut dalam sistem bumi diketahui dari ukuran sebenarnya pada papan kalibrasi dengan kotak yang berukuran 5 cm. Data pada Data hasil uji coba program, khususnya nilai RMS kesalahan tinggi sebesar 0.06 mm (Tabel 3.2), meyakinkan bahwa program yang dibuat sudah valid dan dapat dipakai dengan menggunakan data hasil dari pengukuran lapangan.
Proses rekonstruksi 3D menggunakan data lapangan adalah sebagai berikut : a. Digitasi titik-titik target pada setiap foto.
Seperti diperlihatkan pada Gambar 3.16, pada tahap ini diperoleh koordinat setiap target dalam sistem koordinat masing-masing foto. Pada tahap ini data koordinat target dibagi menjadi 2(dua) kelompok, yaitu :
1) Data 9 target yang dipilih sebagai titik sekawan adalah To1, To2, To3, To4, To5, To6,To7, To8 dan To9. Data ini dipakai sebagai data titik referensi untuk membangun model 3D. Jumlah 9 titik terkait dengan
Gambar 3.16 Digitasi setiap target Tabel 3.2 Data hasil uji coba program
Jumlah titik 551
RMS kesalahan tinggi 0.06 mm
Parameter ekstrinsik (translasi) foto 1/kiri
27
ukuran lebih dari kebutuhan minimal secara matematis, yaitu 6 buah titik. Di lapangan 9 target tersebut ditempatkan dalam bentuk mendekati grid 3 x 3.
2) Data 20 target lainnya : T1 sampai T29; merupakan titik yang akan ditentukan tingginya dari model 3D dan dianalisis hasilnya.
b. Menghitung parameter ekstrinsik kamera pada setiap foto.
Data masukan yang diperlukan untuk menghitung parameter ekstrinsik setiap foto adalah parameter intrinsik kamera hasil kalibrasi dan koordinat titik sekawan pada sistem foto dan sistem bumi. Pada tahap ini diperoleh parameter ekstrinsik setiap foto dalam sistem koordinat bumi yang terdiri atas vektor translasi dan rotasi dari sumbu koordinat sistem kamera. Dengan diperolehnya parameter ekstrinsik tersebut maka rekonstruksi posisi kamera saat pemotretan setiap foto telah berhasil dilakukan. Kondisi tersebut memungkinkan dilakukannya rekonstruksi semua berkas sinar pada setiap piksel foto.
c. Memilih 3 foto yang bertampalan dan menghitung parameter ekstrinsik relatif antar foto-foto tersebut. Pada tahap ini perhitungan posisi relatif antar kamera pada saat pemotretan dilakukan. Hasilnya adalah vektor translasi dan rotasi relatif antar 2 sistem koordinat kamera. Vektor tersebut diperlukan saat rekonstruksi koordinat 3D setiap objek di foto yang ingin ditentukan koordinat 3Dnya dalam sistem bumi.
Pada penelitian ini dipilih 3 kelompok foto. Kelompok tersebut dibuat berdasarkan posisi tinggi terbang, yaitu sekitar 50 m, 60 m, dan 70 m. Pada setiap kelompok dipilih 3 foto yang saling bertampalan dan semua target ada pada setiap foto. Jadi parameter ekstrinsik relatif yang ditentukan pada tahap ini adalah parameter ekstrinsik relatif dalam kelompok foto masing-masing. d. Merekonstruksi koordinat 3D titik-titik target dengan triangulasi stereo.
Pada tahap ini dilakukan perhitungan koordinat 3D titik target dengan data masukan berupa :
1) Koordinat titik pada masing-masing sistem foto 1 dan 2. 2) Parameter intrinsik kamera.
3) Parameter ekstrinsik relatif antar kamera/foto 1 dan 2.
Algoritme triangulasi stereo digunakan dengan menerapkan kondisi kesegarisan dan triangulasi antara vektor-vektor yang menghubungkan titik P,Ol,Or (Gambar 2.3). Hasilnya adalah koordinat X,Y,Z sebuah titik/target
pada sebuah model 3D. Pada tahap ini koordinat X,Y,Z setiap target dihitung. Sampai tahap ini ekstraksi spasial (X,Y,Z ) setiap target telah dapat dilakukan. e. Membandingkan ketinggian hasil pengukuran ETS dengan hasil rekonstruksi
3D.
28
4
HASIL DAN PEMBAHASAN
Pembahasan terhadap hasil penelitian dititikberatkan pada hasil kalibrasi kamera dan rekonstruksi 3D, khususnya ekstraksi spasial dari model berupa koordinat 3D objek pada komponen tingginya saja. Parameter intrinsik hasil kalibrasi kamera merupakan data masukkan pada perhitungan tinggi objek hasil rekonstruksi 3D, oleh karena itu analisis hubungan atau pengaruh parameter intrinsik terhadap tinggi objek dilakukan lebih detil.
4.1 Hasil Kalibrasi Kamera
Keluaran yang diperoleh dari Camera Calibration Toolbox adalah : Calibration results (with uncertainties):
Focal Length: fc = [4096.14584 4097.64434] ± [0.40609 0.40092] Principal point: cc = [2975.87782 1981.72154] ± [0.27895 0.22077] Skew: alpha_c = [0.00096] ± [0.00001]
=> angle of pixel axes = 89.94497 ± 0.00047 degrees Distortion: kc = [-0.06233 0.11848 -0.00236 -0.00252 -0.03805] ± kali. Salah satu cara dengan menghitung ulang koordinat titik-titik pojok kotak hitam-putih pada foto yang memberikan kesalahan besar. Jika tidak ada penurunan besarnya kesalahan maka langkah berikutnya adalah dengan tidak mengikutsertakan foto yang memberikan kesalahan besar pada titik koordinat pojok tersebut dalam perhitungan parameter intrinsik.
Gambar 4.1 mengilustrasikan proses iterasi yang dilakukan berdasarkan hasil plot kesalahan titik-titik di setiap foto terhadap nilai yang sebenarnya. Pada prinsipnya proses iterasi yang dilakukan adalah menentukan koordinat titik-titik pojok kotak hitam-putih pada setiap foto yang masih memiliki kesalahan cukup besar. Grafik sebelah kiri menunjukkan masih ada titik pojok yang mempunyai kesalahan terbesar pada sumbu y dan x sampai x = +15 piksel dan y = +10 piksel.
29
Pada grafik tengah kesalahan dapat diperkecil dan grafik kanan memperlihatkan kesalahan terbesar yang mengecil hingga x < + 0.5 piksel dan y < + 0.3 piksel. Proses iterasi dihentikan saat diperoleh nilai pixel error terkecil yang dapat dicapai, dengan demikian nilai-nilai komponen parameter intrinsik terakhir yang dianggap nilai terbaik/definitif. Proses ini dilakukan tidak secara otomatis tetapi dengan melibatkan pengolah data. Pemilihan foto yang perlu dilakukan penentuan ulang koordinat titik-titik pojok kotak hitam-putih dan besarnya ukuran jendela pada proses corner finder ditentukan oleh pengolah data. Dengan demikian nilai definitif parameter intrinsik sebuah kamera kemungkinan besar akan tidak tunggal, walau pun menggunakan sejumlah foto yang sama. Hal ini disebabkan karena adanya faktor subjektif dari pengolah data.
Untuk mengetahui faktor apa saja yang mempengaruhi parameter intrinsik kamera pada penelitian ini dilakukan 3(tiga) kali pemotretan papan kalibrasi yang hasilnya diperlihatkan pada Tabel 4.1.
Tiga pemotretan untuk kalibrasi kamera dilakukan sebagai berikut :
Pemotretan kalibrasi pertama pemotretan udara pertama pemotretan kalibrasi kedua pemotretan kedua pemotretan kalibrasi ketiga.
Pada pemotretan kalibrasi pertama, posisi kamera tidak ditentukan pola posisinya terhadap papan kalibrasi. Penempatan posisi papan kalibrasi pada bidang foto yang menjadi faktor utama.
Pada pemotretan kalibrasi kedua, posisi kamera dilakukan di 9 posisi seperti matriks 3 x 3. Jarak antara kamera dan papan kalibrasi dipertahankan hampir sama serta variasi penempatannya pada bidang foto dipertahankan seperti pada pemotretan pertama.
Pada pemotretan ketiga dicoba papan kalibrasi dengan ukuran kotak 5 cm dan lensa kamera diatur pada posisi manual focus dan dikunci. Hal ini dilakukan dengan tujuan untuk memudahkan penentuan titik pojok kotak hitam-putih dan posisi fokus kamera sedekat mungkin dengan posisi fokus saat pemotretan di udara dilakukan, sedangkan pada kalibrasi pertama dan kedua dilakukan dengan
Tabel 4.1 Parameter intrinsik hasil tiga kalibrasi No Jenis Parameter Parameter
Intrinsik
Kalibrasi Pertama(I) Kalibrasi Kedua(II) Kalibrasi Ketiga(III)
Nilai Std.Dev. Nilai Std.Dev. Nilai Std.Dev.
30
auto-focus. Selain itu, pada pemotretan kalibrasi ketiga jarak antara kamera dan papan kalibrasi diatur dalam berbagai jarak, dekat dan cukup jauh hingga 2-3 x jarak pada kalibrasi pertama dan kedua.
Pada Gambar 4.2 ditampilkan visualisasi posisi dan konfigurasi kamera saat pemotretan terhadap papan kalibrasi pada ketiga pemotretan kalibrasi. Limas berwarna hijau bergaris merah mewakili posisi kamera dan foto, sedangkan angka menunjukkan posisi kamera dan banyaknya foto yang digunakan pada pengolahan data untuk menghitung parameter intrinsik.
Gambar 4.2 memperlihatkan adanya perbedaan konfigurasi posisi kamera dan jarak kamera ke papan kalibrasi. Hal tersebut dilakukan untuk mengetahui apakah nilai parameter intrinsik akan dipengaruhi oleh hal tersebut.
Tabel 4.1 memperlihatkan adanya perbedaan nilai yang berarti, antara lain : 1) Panjang fokus lensa hasil kalibrasi ketiga berbeda sangat berarti hingga 80
piksel dibandingkan dengan nilai pertama dan kedua. Dari hasil tersebut tampak bahwa panjang fokus merupakan komponen parameter intrinsik yang sangat dipengaruhi dari tahap kalibrasi.
2) Koordinat piksel titik utama juga mempunyai perbedaan yang berarti tetapi perbedaannya tidak lebih dari 30 piksel.
3) Nilai koefisien radial dan tangensial (K1, K2, K3, P1, P2) juga menunjukkan
perbedaan yang tidak terlalu berarti. Hal ini tampak dari model distorsi yang diperlihatkan pada Gambar 4.3, 4.4 dan 4.5.
Secara grafik perbedaan tersebut dapat divisualisasikan dengan baik berupa 3(tiga) model distorsi (Lengkap, Radial dan Tangensial) seperti tampak pada Gambar 4.3.
(a) (b) (c)
Gambar 4.2 Konfigurasi dan posisi kamera pada ketiga kalibrasi
31
Pada Gambar 4.3, 4.4 dan 4.5 diperlihatkan grafik yang memodelkan adanya distorsi radial dan tangensial serta model gabungannya. Panah-panah biru menunjukkan bahwa titik objek pada foto mengalami distorsi dari posisi sebenarnya ke arah tertentu. Hal tersebut disebabkan oleh faktor internal kamera terutama pada bagian lensa.
Pada model distorsi gabungan tampak adanya perbedaan kontur yang berkaitan dengan besaran nilai parameter intrinsik yang ditampilkan pada Tabel 4.1. Analisis yang dapat dikemukakan terhadap data tersebut antara lain :
1) Konfigurasi posisi kamera saat pemotretan papan kalibrasi memberikan pengaruh yang tidak banyak berarti. Hal ini terlihat dari hasil kalibrasi pertama dan kedua. Panjang fokus lensa yang dihasilkan relatif sama dan nilai koefisien radial dan tangensial juga tidak banyak perbedaannya. Gambar 4.2(b) memperlihatkan bahwa posisi kamera pada kalibrasi kedua sangat bervariasi, jarak dekat, sedang dan jauh. Ternyata nilai parameter intrinsiknya tidak terlalu jauh berbeda dengan hasil kalibrasi pertama. Pada kalibrasi ketiga juga terdapat posisi kamera yang cukup dekat dan jauh dengan papan kalibrasi tetapi tidak mempengaruhi nilai parameter intrinsik secara berarti. 2) Pengaturan panjang fokus lensa, auto-focus atau manual, merupakan faktor
yang sangat berarti pada nilai parameter intrinsik. Kalibrasi pertama dan kedua fokus lensa diatur pada posisi auto-focus dan nilai parameter intrinsik panjang fokus relatif sama (4014.66 dan 4015.44) yang berbeda hanya
dalam 1 piksel. Tetapi panjang fokus hasil kalibrasi ketiga memiliki perbedaan sampai dengan 80 piksel (4096.15) , hal ini disebabkan karena fokus diatur
secara manual pada posisi terjauh.
3) Perubahan atau perbedaan nilai parameter intrinsik mungkin disebabkan oleh karena kamera low cost memiliki tingkat kestabilan yang rendah. Kamera tersebut memang bukan untuk fotogrametri, oleh karena itu penentuan
32
parameter intrinsik perlu dilakukan sesering mungkin. Tetapi pada kasus kamera yang digunakan pada penelitian ini dapat dikatakan bahwa kamera ini mempunyai kestabilan yang cukup bagus. Hal ini dapat dilihat dari nilai parameter intrinsik kalibrasi pertama dan kedua yang tidak banyak berbeda, sehingga faktor fisik kamera tidak menjadi faktor yang berpengaruh.
Selain tiga analisis di atas terhadap beberapa faktor yang sudah diuraikan, yaitu faktor penempatan papan kalibrasi pada bidang foto, seperti Gambar 3.5, merupakan salah satu faktor yang penting dibahas khusus. Untuk itu, pada penelitian ini juga dilakukan perhitungan parameter intrinsik menggunakan kelompok foto hasil pemotretan kalibrasi pertama, tetapi dengan memilih foto tertentu saja. Pemilihan foto tertentu tersebut diatur sedemikian rupa sehingga foto yang diproses berisi posisi papan kalibrasi yang tidak melingkupi semua sisi lensa. Hasilnya diperlihatkan pada Tabe; 4.2.
Pada Tabel 4.2 terdapat2 set parameter intrinsik, IV dan V, yang diperoleh dari 2 set foto papan kalibrasi. Parameter intrinsik kelompok IV dan V merupakan parameter intrinsik hasil pemilihan foto yang posisi papan kalibrasi hanya pada sisi tertentu (Gambar 4.6(b) dan 4.6(c)). Terlihat parameter intrinsik yang hasilnya berbeda secara berarti, khususnya pada komponen panjang fokus. Hal ini menunjukkan faktor penempatan papan kalibrasi pada bidang foto merupakan salah satu kriteria penting yang harus diperhatikan pada kalibrasi kamera.
Selain menggunakan papan kalibrasi, pada penelitian ini dilakukan juga perhitungan parameter intrinsik menggunakan data foto udara. Metode ini dikenal dengan istilah Field-Calibration. Prinsip perhitungannya tetap menggunakan Camera Calibration Toolbox dari Jean-Yves Bouguet (2010) yang dimodifikasi dan disesuaikan sesuai dengan kondisi data masukan yang ada. Besaran yang menjadi masukan adalah koordinat 29 target pada 9 foto udara yang dipilih untuk rekonstruksi 3D serta koordinat target tersebut pada sistem koordinat bumi. Parameter intrinsik yang diperoleh dari data foto udara tersebut disimpan pada Tabel 4.2 kolom VI.
Standard deviasi parameter intrinsik hasil kalibrasi kamera tersebut, khususnya pada komponen panjang fokus lensa sebesar 12 piksel dan koordinat titik fidusial sebesar 3 piksel, jauh lebih besar dibandingkan dengan hasil papan kalibrasi yang lebih kecil dari 1 piksel. Hal tersebut diseperkirakan karena jumlah dara masukan yang sedikit, yaitu data berupa koordinat 29 titik/target setiap foto dan hanya menggunakan sembilan foto udara. Sedangkan jika menggunakan
(a) (b) (c) Gambar 4.6 Konfigurasi posisi kamera hasil pemilihan posisi papan
33
papan kalibrasi ukuran kotak 3 cm terdapat 1369 titik setiap foto serta jumlah fotonya lebih dari 40 foto.
Gambar 4.6 mengilustrasikan konfigurasi posisi kamera saat pengambilan foto yang berkorelasi dengan parameter intrinsik pada Tabel 4.2. Pada Gambar 4.6(a) diperlihatkan konfigurasi posisi kamera jika semua foto yang berisi papan kalibrasi melingkupi bidang foto, sedangkan pada Gambar 4.6(b) dan 4.6(c) diperlihatkan bahwa jika pemotretan papan kalibrasi dilakukan seperti itu maka akan mempengaruhi nilai parameter intrinsik yang diperoleh (Tabel 4.2 kolom IV dan V)
Dengan demikian sebuah kamera dengan satu lensa tertentu dapat memiliki beberapa parameter intrinsik. Parameter intrinsik bervariasi tergantung optimasi dan pemilihan faktor-faktor yang mempengaruhi dan telah dijelaskan sebelumnya. Pada penelitian ini dipilih beberapa kelompok parameter intrinsik yang akan digunakan pada rekonstruksi 3D. Pengelompokan dibuat berdasarkan dominasi faktor penting yang telah diuraikan sebelumnya serta kombinasinya. Parameter intrinsik dari Tabel 4.1 dan Tabel 4.2 akan digunakan sebagai salah satu faktor yang akan dianalisis pengaruhnya terhadap akurasi tinggi objek hasil rekonstruksi. Jadi ada 6 kelompok parameter intrinsik yang dipakai sebagai data masukkan pada rekonstruksi 3D (Tabel 4.3).
Tabel 4.2 Parameter intrinsik kamera hasil kalibrasi dengan mengubah konfigurasi posisi papan kalibrasi dan menggunakan foto udara
4021.74845 ± 0.09095 4004.15502 ± 0.10934 4053.86652 ± 12.51514
2 fy (piksel) 4021.00587 ± 0.08871 4004.6336 ± 0.10910 4054.95274 ± 12.47136 3 Titik Tengah
Foto
xp(piksel) 2982.02057 ± 0.07782 2944.30200 ± 0.10509 2983.59159 ± 3.02136
4 y
34
4.2 Hasil Rekonstruksi 3D
Data masukan pada proses rekonstruksi 3D adalah parameter intrinsik kamera, koordinat target titik sekawan pada sistem koordinat masing-masing foto dan koordinat target pada sistem bumi. koordinat target pada sistem bumi dijadikan sebagai acuan dan dianggap tidak memiliki kesalahan karena tingkat akurasinya yang paling baik. Koordinat 9 target yang dipilih sebagai titik sekawan memiliki kesalahan karena proses digitasi manual dan faktor identifikasi titik silang kotak hitam-putih yang bisa memiliki nilai berbeda setiap melakukan digitasi. Ada 6 set/kelompok parameter intrinsik yang memiliki nilai yang berbeda. Oleh karena itu pembahasan lebih detil ditujukan pada dua faktor terakhir.
Setelah perhitungan parameter ekstrinsik setiap foto (butir 3.3.2 b) dapat dihitung penyimpangan atau selisih koordinat target hasil dari proyeksi ulang dengan koordinat hasil digitasi. Caranya dengan melakukan proyeksi ulang koordinat titik sekawan dengan masukan koordinat hasil digitasi dan parameter ekstrinsik hasil hitungan, kemudian koordinat hasil proyeksi tersebut dibandingkan dengan hasil digitasi. Tujuannya adalah untuk mengetahui validitas data dan parameter ekstrinsik final terbaik yang dapat ditentukan, yaitu dengan mencari nilai minimal perbedaannya antara hasil digitasi dengan hasil hitungan. Penyimpangan posisi target 9 titik sekawan diperlihatkan pada Tabel 4.4. Data yang ada pada tersebut diperoleh dari 9 foto (FA1, FA2, FA3, FB1, FB2, FB3, FC1, FC2, FC3) digunakan untuk analisis dengan menggunakan satu set
Tabel 4.3 Hasil kalibrasi kamera : 6 set parameter intrinsik No
a) Parameter intrinsik I,II dan III dari Tabel 4.1 b) Parameter intrinsik IV,V dan VI dari Tabel 4.2
c) Parameter intrinsik I,II,IV,V dan VI adalah hasil kalibrasi dengan pengaturan lensa pada kondisi auto-focus menggunakan papan kalibrasi
d) Parameter intrinsik III adalah hasil kalibrasi dengan pengaturan lensa pada kondisi fix-focus menggunakan papan kalibrasi
35
parameter intrinsik (kelompok ketiga). Besarnya Root Mean Square (RMS) dari selisih koordinat titik sekawan tidak ada yang lebih besar dari 0.5 piksel. Dengan demikian ketelitian parameter ekstrinsik yang diperoleh sudah menghasilkan ketelitian titik sekawan hasil proyeksi ulang lebih kecil dari 1 piksel. Hasil ini menunjukkan bahwa koordinat titik sekawan hasil digitasi cukup baik.
Besarnya kesalahan koordinat hasil proyeksi ulang dapat diperbaiki hingga diperoleh RMS minimal dengan mengubah nilai koordinat hasil digitasi. Caranya dengan mengurangi atau menambahkan 1 piksel atau lebih pada koordinat x dan atau y pada koordinat hasil digitasi pada titik To1 sampai To9. Koordinat hasil digitasi titik To1 sampai To9 yang dianggap final adalah koordinat yang memberikaan nilai RMS terkecil pada setiap foto. Besarnya RMS pada Tabel 4.4 adalah hasil optimal yang dapat diperoleh dari digitasi manual. Proses digitasi secara manual menimbulkan adanya faktor subyektifitas pendigit akan mempengaruhi ketelitian hasil.
Pada penelitian ini diperoleh data bahwa bentuk target yang dipakai mempengaruhi ketelitian koordinat hasil digitasi. Titik pojok atau persilangan kotak hitam-putih pada foto udara digital hasil pemotretan dari UAV ternyata tidak tampak dengan jelas sehingga tidak mudah diidentifikasi. Kondisi ini
Tabel 4.4 Kesalahan titik sekawan