AUTOMATED GUIDED VEHICLE USING LINE FOLLOWING DETECTION
MOHD KHAIRULZAMAN BIN A RAHMAN
This report is submitted in partial fulfillment of the requirements for the award of Bachelor of Electronic Engineering ( Industrial Electronics ) With Honours.
Faculty of Electronic and Computer Engineering Universiti Teknikal Malaysia Melaka
ii
UNIVERSTI TEKNIKAL MALAYSIA MELAKA
FAKULTI KEJURUTERAAN ELEKTRONIK DAN KEJURUTERAAN KOMPUTER
BORANG PENGESAHAN STATUS LAPORAN PROJEK SARJANA MUDA II
Tajuk Projek : AUTOMATED GUIDED VEHICLE USING LINE FOLLOWING DETECTION
Sesi
Pengajian : 2008/2009
Saya MOHD KHAIRULZAMAN BIN A RAHMAN . (HURUF BESAR)
mengaku membenarkan Laporan Projek Sarjana Muda ini disimpan di Perpustakaan dengan syarat-syarat kegunaan seperti berikut:
1. Laporan adalah hakmilik Universiti Teknikal Malaysia Melaka.
2. Perpustakaan dibenarkan membuat salinan untuk tujuan pengajian sahaja.
3. Perpustakaan dibenarkan membuat salinan laporan ini sebagai bahan pertukaran antara institusi pengajian tinggi.
4. Sila tandakan ( √ ) :
SULIT*
(Mengandungi maklumat yang berdarjah keselamatan atau kepentingan Malaysia seperti yang termaktub di dalam AKTA RAHSIA RASMI 1972)
TERHAD* (Mengandungi maklumat terhad yang telah ditentukan oleh organisasi/badan di mana penyelidikan dijalankan)
TIDAK TERHAD
Disahkan oleh:
__________________________ ___________________________________
(TANDATANGAN PENULIS) (COP DAN TANDATANGAN PENYELIA)
Alamat Tetap: 164 JALAN JELUTONG FELDA BUKIT TONGKAT 86000 KLUANG JOHOR
“I hereby declare that this report is the result of my own work expect for quotes as cited in the references.”
Signature :...
iv
“I hereby declare that I have read this report and in my opinion this report is sufficient in terms of the scope and quality for the award of Bachelor of Electronic Engineering
( Industrial Electronics ) With Honours.”
Signature :...
Supervisor‟s Name :PN NORIHAN ABDUL HAMID
v
vi
ACKNOWLEDGEMENTS
vii
ABSTRACT
viii
ABSTRAK
ix
CONTENTS
CHAPTER TOPIC PAGE
PROJECT TITLE i
REPORT STATUS CERTIFICATION ii
DECLARATION iii
SUPERVISOR CERTIFICATION iv
DEDICATION v
ACKNOWLEDGEMENTS vi
ABSTRACT vii
ABSTRAK viii
CONTENTS ix
LIST OF TABLE xiv
LIST OF FIGURE xv
x
I INTRODUCTION
1.1 Overview 1
1.2 Objectives 3
1.3 Problem Statement 3
1.4 Overview Of Project Methodology 4
II LITERATURE REVIEW
2.1 Overview 5
2.2 Example Of The Line Following Robot 8
2.2.1 Sandwich 8
2.2.1.1 Method Used By Sandwich 9
2.2.2 Desktop Line Following Robot 10
2.2.2.1 Method Used By Desktop
Line Following Robot 11
2.2.3 Line Following Van 13
2.2.3.1 Method Used By Line Following 13
Van
2.3 Devices And Components 16
xi
2.3.1.1 Servo Motor Control 16
2.3.2 Infrared Sensor 19
2.3.3 Microcontroller 20
2.3.3.1 PIC16F877A 21
2.3.4 Comparator LM324 24
2.3.4.1 Unique Characteristics 24
2.3.4.2 Advantages 25
2.3.5 Motor Driver L293d 25
III PROJECT METHODOLOGY
3.1 Introduction 26
3.2 Circuits 31
3.2.1 Infrared Sensor Circuit 31
3.2.2 Motor Driver Circuit 33
3.2.3 Microcontroller Circuit 34
3.3 Components Selection 35
3.3.1 Capacitor 35
3.3.2 Infrared 37
xii
3.3.4 Microcontroller PIC16F877A 38
3.3.5 Voltage Regulator LM7805 41
3.4 Software 42
3.4.1 Eagle Software 43
3.5 Programming Develop Software 45
3.5.1 MPLAB IDE 45
3.6 Circuits Installation 46
3.6.1 Preparing the Components 46
3.6.2 Testing the Components 47
3.6.3 Making the Printed Circuit Board 48
3.6.4 Components Installation into 49
Printed Circuit Board
IV RESULT AND DISCUSSION
4.1 Introduction 50
4.2 Result Analysis 50
4.2.1 Infrared Sensor Circuit 51 4.2.2 Sensor Detection And Response 53
xiii
4.2.2.1 Robot Movement 55
4.2.3 Coordinating the Motor and Sensor 57
4.2.4 Robot on Track 58
4.2.5 Layout of The Chassis Mobile Robot 59
4.3 DISCUSSION 62
V CONCLUSION AND RECOMMENDATION
5.1 CONCLUSION 63
5.2 Problem Statement 64
5.3 Recommendation 64
5.4 Future Improvement 65
REFERENCE 66
LIST OF TABLE
NO TITLE PAGE
2.1 Features of Atmel ATmega8 for Desktop Line Following Robot 11 2.2 Summary of the comparison of Stepper Motors and Servomotors 17
3.1 Component List For Line Following Robot 47
4.1 Sensor Detection And Response 54
4.2 Combination Of The Wheels To Move The Robot In The 57 Desired Direction
xv
LIST OF FIGURE
NO TITLE PAGE
1.1 Block Diagram Of Line Following Mobile Robot 2
2.1 Application of Mobile Robot 7
2.2 Model of Sandwich Line Following Robot 9
2.3 White LED as a Headlight Between Cadmium-sulfide Photoresistors 9 2.4 Bottom View and Side View of the Desktop Line Following Robot 10 2.5 Output Current and LED Current and Ambient Light 12
2.6 H-Bridge for Turning Motor 14
2.7 Schematic of the Photo-Transistor Sensor Circuit 15
2.8 Connection and operation servomotor 18
2.9 Basic Prinsiple of IR Sensor 20
xvi
2.11 L293D IC 25
3.1 Flow Chart of the Project Methodology 27
3.2 Sensor Placement View from Top Of The Robot 29
3.3 Distance between Two Sensors 30
3.4 Infrared Sensor Circuit 30
3.5 Motor Driver Circuit 31
3.6 Microcontroller Circuit with PIC16F877A 32
3.7 Type Of Capacitor 34
3.8 Symbol of the Capacitor 34
3.9 Infrared Sensor 35
3.10 Symbol Of Diode 36
3.11 Picture of PIC 16F877A 37
3.12 Pin Assignment For LM7805 39
3.13 Block Diagram of Voltage Regulator 40
3.14 Medium Used to Make The Schematic Circuit 43
3.15 Medium Used to Make The PCB Layout and Example of PCB Layout 44
3.16 Method for Programming PIC 45
3.17 Window interface in MPLAB IDE For Making Source Code. 46
3.18 InfraRed Sensor Circuit Testing 48
xvii
3.20 Components Installation into Printed Circuit Board 49
4.1 The Infrared Sensor Circuit. 51
4.2 Sensor Placement View from Top Of The Robot 52
4.3 Circuit Simulation On Breadboard Without Power Supply 52 4.4 Circuit Simulation On Breadboard With Power Supply 53
4.5 All Sensor Detect The Black Line 55
4.6 Centre Sensor Detect the Line 55
4.7 Right Sensor Detect the Line 56
4.8 Left Sensor Detect the Line 56
4.9 The Line Following Robot at Line Following Track 58
4.10 Chassis of the Mobile Robot from Top View 59
4.11 Top View of Line Following Robot 60
4.12 Bottom View of Line Following Robot 60
4.13 Side View of Line Following Robot 61
xviii
LIST OF APPENDIX
NO TITLE PAGE
A Datasheet L293D 67
B Datasheet LM324 72
C Datasheet PIC16F87XA 77
D Source Code of Line Following Robot 83
CHAPTER I
INTRODUCTION
1.1 Overview
2
Some example in production line, the operator need manually take some component or semi-product at pick-up place when at their point is empty. It will take more time to move from their point to the pick-up place and can reduce the outputs. To solve this problem we have use automated line mobile robot system, where the operator only need to pressed some button then the line mobile robot will reach at their point with the component.
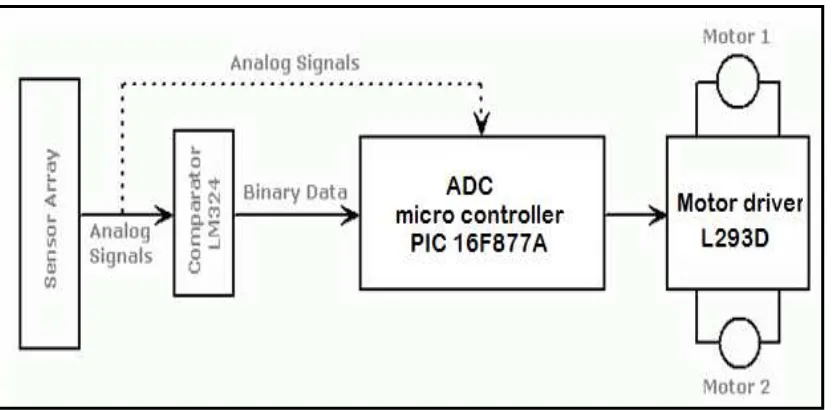
[image:20.595.115.531.372.577.2]This project is to making the automated guided vehicle (AGV) using line following detection. This AGV usually used in material transportation in an automated production line or in an automatic storage and retrieval system. This typical project consist of the hardware (the vehicle consist of mechanical device) while controlled by electronics part and some algorithm. For this project, we used the PIC to integrated the sensor and the motor as shown in figure 1.1
3
1.2 Objectives
The objectives of this project are:
I. To design and implement the automated guided vehicle using line following detection.
II. To learn PIC programming and how to implement it on the hardware installation.
III. To understand the concept of electrical DC motor system and sensor for detect the line.
IV. To construct and design the wiring system and connectivity and also the mechanical part.
1.3 Problem Statement
As we know, there are many method used for transportation in production and storage system in factory. Some factory used manual method whereby the used human to complete task in their storage system. For example in storage system and production line usually we have used human power to carry some component at production line. This will need more time, more consumption reduce the outputs.
4
1.4 Overview Of Project Methodology
CHAPTER II
LITERATURE REVIEW
This chapter discusses about the background research and concept of the project and will explain further of the project‟s perspective and methods used in research.
2.1 Overview
Nowadays, many method used to line following detection. For example using phototransistors, IR sensor or ultrasonic sensor. Each method have their own advantages and disadvantages.
6
robots have some degree of autonomy. Different robots can be autonomous in different ways. A high degree of autonomy is particularly desirable in fields such as space exploration, cleaning floors, mowing lawns, and waste water treatment.
One important area of robotics research is to enable the robot to cope with its environment whether this is on land, underwater, in the air, underground, or in space. A fully autonomous robot has the ability to
I. Gain information about the environment.
II. Work for an extended period without human intervention.
III. Move either all or part of itself throughout its operating environment without human assistance.
IV. Avoid situations that are harmful to people, property, or itself unless those are part of its design specifications.
An autonomous robot may also learn or gain new capabilities like adjusting strategies for accomplishing its task or adapting to changing surroundings. Autonomous robots still require regular maintenance, as do other machines [3].
Beside that line follower is a machine that can follow a path. The path can be visible like a black line on a white surface (or vice-versa) or it can be invisible like a magnetic field [2].