1
BAB I
PENDAHULUAN
1.1
Latar Belakang
Seiring dengan berkembangnya teknologi yang semakin maju dan kompetitif
telah membawa dampak bagi bidang ilmu pengetahuan terutama pada bidang
pemindaian objek dengan komputer. Teknologi pemindaian objek ini adalah
teknologi yang menggabungkan kemampuan
hardware untuk melihat objek dan
kemampuan
software yang digunakan untuk mengolah data yang diterima oleh
hardware tersebut. Sistem pemindaian objek ini akan menerima data gambar dua
dimensi (2D) yang berupa garis tipis yang diterima dari sinar laser, lalu secara
otomatis
software akan mengolah garis tipis tersebut dan menjadikannya sebagai
objek tiga dimensi (3D).
Scanning 3D adalah proses menangkap informasi digital tentang bentuk objek
dengan peralatan yang menggunakan laser atau cahaya untuk mengukur jarak antara
scanner dan objek. Hal ini dapat digunakan untuk kebutuhan modifikasi, manufaktur,
monitoring yang dibantu komputer, atau hanya menyimpan informasi bentuk objek
untuk kebutuhan di masa depan.
2
Berdasarkan permasalahan tersebut, maka dilakukan sebuah penelitian
mengenai pemodelan objek menggunakan
3D scanning
untuk memudahkan dalam
memvisualkan objek secara lebih cepat untuk dunia manufaktur.
1.2
Maksud dan Tujuan Penelitian
Maksud dari pembuatan alat ini adalah membuat alat yang bisa mengambil
data, menyimpan data, dan mengolah data untuk kebutuhan rekonstruksi atau
memodelkan ulang objek di dunia nyata ke dalam bentuk digital bagi keperluan
industri manufaktur.
Tujuan dibuat alat ini adalah:
1.
Membuat dan merancang alat
scanning
objek 3D untuk mempermudah
melakukan proses
scanning
objek 3D untuk kebutuhan
prototype (proses
pengembangan).
2.
Dapat memodelkan objek secara tiga dimensi (3D).
3.
Menciptakan sebuah teknologi untuk dunia manufaktur dan grafis.
1.3
Batasan Masalah
Agar pembahasan tidak meluas atau menyimpang dari permasalahan yang
ada, maka dalam penyusunan skripsi ini dibatasi dalam beberapa hal :
1.
Modul yang digunakan sebagai pengontrol kerja alat adalah Arduino Leonardo
yang didalamnya terdapat mikrokontroler ATMEGA32u4.
2.
Sensor-sensor yang digunakan pada perancangan alat ini:
a)
Sensor laser menggunakan jenis line laser.
b)
Sensor kamera menggunakan webcam Logitech 270.
3.
Objek yang akan dipindai berupa patung, boneka, vash, guci dan objek bangun
ruang.
4.
Piringan atau landasan untuk objek berdiameter 19,8 ± 0,3 cm.
5.
Posisi benda yang akan dipindai harus berada di tengah platter.
3
7.
Percobaan dan pengujian sistem hanya dilakukan di dalam ruangan yang tertutup
(tidak adanya cahaya yang masuk dari luar ruangan).
1.4
Metodologi Penelitian
Perancangan dalam pembuatan tugas akhir ini dilakukan beberapa tahap, yaitu
1.
Studi literature
Mengumpulkan bahan yang akan dijadikan tugas akhir dari buku-buku
teks, internet, diskusi dengan dosen yang ahli di bidangnya, serta
diskusi dengan teman.
2.
Observasi lapangan
Pada penelitian ini, penulis telah melakukan beberapa survey di
lapangan antara lain dengan cara mencari dan mengumpulkan
bahan-bahan dan komponen yang dibutuhkan dalam pembuatan sistem ini.
3.
Interview dan eksperimen
Mencoba berbagai modul yang telah dipersiapkan dari hasil studi
literatur serta mendiskusikan hasil eksperimen dengan dosen
pembimbing dan beberapa pakar.
4.
Perancangan dan implementasi
Mengintegrasikan antar perangkat keras (modul rangkaian elektronik,
mekanik dan kamera) dengan perangkat lunak sehingga tersusun
sebuah sistem yang dapat memindai objek.
5.
Pengujian dan analisa
Menguji alat yang dibuat, kemudian mengambil dan menganalisa data
dari alat tersebut. Tahapan ini bertujuan untuk mengetahui apakah alat
pemodelan objek ini dapat bekerja dengan baik. Data yang diperoleh
selama tahapan ini dapat menggambarkan
progress
dari penelitian
yang dilakukan.
6.
Pembuatan laporan dan kesimpulan
4
1.5
Sitematika Penulisan
Adapun sistematika penulisan pada tugas akhir ini adalah sebagai berikut :
BAB I. PENDAHULUAN
Dalam bab ini membahas tentang latar belakang, maksud dan tujuan
penulisan, batasan masalah, metoda penulisan dan sistematika penulisan.
BAB II. TEORI PENUNJANG
Bab ini membahas mengenai teori-teori penunjang yang berhubungan dengan
perancangan perangkat keras dan perangkat lunak yang diperoleh dari hasil
studi literatur dan studi lapangan yang digunakan untuk merancang sistem.
BAB III. PERANCANGAN SISTEM
Bab ini membahas mengenai perancangan mekanik, elektronik dan algoritma
yang digunakan sistem.
BAB IV . HASIL PENGUJIAN DAN ANALISA
Bab ini membahas mengenai cara kerja sistem dan analisa data hasil
pengujian sistem di lapangan.
BAB V. KESIMPULAN DAN SARAN
1
BAB V
KESIMPULAN DAN SARAN
5.1
Kesimpulan
Berdasarkan hasil uji dan analisis beberapa data percobaan terhadap
system yang dirancang, dapat diambil beberapa kesimpulan sebagai
berikut :
1.
Alat 3D scanning ini mampu merekontruksi objek yang dipindai.
2.
Bentuk dan bahan sangat mempengaruhi detail dari permukaan objek yang
direkontruksi, bila bahan objek terbuat dari sesuatu yang menyerap cahaya
laser maka objek tidak akan terrekontruksi.
3.
Sudut penempatan antara
webcam dan laser mempengaruhi hasil dari
scanning karena pada objek tertentu ada bagian objek yang tidak
tertangkap.
4.
Dari percobaan yang dilakukan terhadap 11 objek terlihat bahwa objek
bangun ruang (tabung, balok, limas segitiga, kerucut, prisma segitiga)
yang mempunyai bahan tidak menyerap cahaya menghasilkan pemodelan
3D yang cukup baik terlihat dari hasil pemodelan yang menyerupai objek
yang dipindai.
5.
Keberhasilan deteksi objek alat ini adalah
x 100% = 63% dan 37%
objek yang tidak terekontruksi dengan baik.
5.2
Saran
Saran untuk penelitian selanjutnya agar lebih baik yaitu :
1.
Menggunakan dua buah line laser yang ditempatkan di kiri dan kanan
webcam untuk mencegah kehilangan informasi pantulan sinar laser dari
objek yang dipindai.
2.
Penempatan webcam dan laser sebaiknya flexible.
PEMODELAN OBJEK MENGGUNAKAN
3D SCANNING
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada
Program Studi Strata Satu Sistem Komputer di Jurusan Teknik Komputer
DISUSUN OLEH :
Arrizal Komarayatna
10209100
PEMBIMBING
John Adler, M.Si
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
vii
DAFTAR ISI
LEMBAR PENGESAHAN ... ii
LEMBAR PERNYATAAN ... iii
ABSTRAK ... iv
ABSTRACT ... v
KATA PENGANTAR ... vi
DAFTAR ISI ... vii
DAFTAR TABEL ... x
DAFTAR GAMBAR ... xi
BAB I PENDAHULUAN ... 1
1.1
Latar Belakang ... 1
1.2
Maksud dan Tujuan Penelitian ... 2
1.3
Batasan Masalah ... 2
1.4
Metodologi Penelitian ... 3
1.5
Sitematika Penulisan ... 4
BAB II TEORI PENUNJANG ... 5
2.1
3D Scanning... 5
2.1.1
White Light Scanning ... 7
2.1.2
Photogrammetry ... 7
2.1.3
Machine Vision... 8
2.1.4
Coordinate Measuring Machine ... 8
2.1.5
Desctructive Slicing ... 9
2.1.6
3D CT atau MRI Scanning ... 9
2.1.7
Theodolite ... 9
viii
2.1.9
3D Laser Scanning ... 10
2.2
Perangkat Keras ... 12
2.2.1
Catu Daya ... 12
2.2.2
Mikrokontroler ... 12
2.2.2.1
Fitur pada Mikrokontroler ATMEGA32u4 ... 13
2.2.2.2
Konfigurasi Pin ATMEGA32u4 ... 14
2.2.3
Sensor ... 15
2.2.3.1
Line Laser ... 15
2.2.3.2
Kamera ... 16
2.2.4
Motor Stepper ... 17
2.3
Perangkat Lunak ... 17
2.3.1
Processing ... 17
2.3.2
Arduino IDE ... 18
2.3.3
3dreshaper ... 19
BAB III PERANCANGAN SISTEM ... 21
3.1
Objek-objek yang akan dipindai ... 21
3.2
Perancangan Perangkat Keras... 22
3.2.1
Perancangan Blok Sistem ... 24
3.2.2
Webcam ... 24
3.2.3
Modul Stepper ... 25
3.2.4
Line Laser ... 25
3.2.5
Mikrokontroler ATMEGAa32u4 ... 26
3.3
Perancangan Perangkat Lunak ... 28
3.3.1
Diagram alur pergerakan stepper ... 28
3.3.2
Diagram alur image capturing ... 29
3.3.3
Pengolahan gambar ... 30
ix
BAB IV HASIL PENGUJIAN DAN ANALISA ... 33
4.1
Pengujian Perangkat Keras ... 33
4.1.1
Pengujian Webcam ... 33
4.1.2
Pengujian Line Laser ... 33
4.1.3
Pengujian Stepper... 33
4.1.4
Pengujian Arduino Leonardo ... 34
4.2
Hasil Kerja Alat ... 34
4.3
Pengujian Hasil Rekontruksi Terhadap Bentuk dan Bahan Objek ... 34
BAB V KESIMPULAN DAN SARAN ... 58
5.1
Kesimpulan ... 58
55
DAFTAR PUSTAKA
[1].
Colubri, Andres., GSVideo library. Diakses pada tanggal 19 oktober 2013
dari http://gsvideo.sourceforge.net/.
[2].
Wetzler, Aaron., Low cost 3D Laser Scanning Unit with application to
Face Recognition. Diakses pada tanggal 19 oktober 2014 dari
http://cs.technion.ac.il/~twerd/Undergrad-2005.pdf.
[3].
Syahrul,
2012,
Mikrokontroler
AVR
ATMEGA8535.
Bandung:
Informatika.
[4].
Margolis, M., 2012,
Arduino cookbook, second edition.
O’Reilly Media
Inc, USA.
[5].
Axelsson, Peter., Processing of laser scanner data
—
algorithms and
applications.
Diakses
pada
tanggal
19
oktober
2014
dari
http://warnercnr.colostate.edu/~lefsky/isprs/1133.pdf.
[6].
Denmead, Ken., 2013, Diy 3D laser scanner using arduino. Diakses pada
tanggal 19 oktober 2014 dari
http://makezine.com/projects/diy-3d-laser-scanner-using-arduino/,
1
PEMODELAN OBJEK MENGGUNAKAN 3D SCANNING
Arrizal komarayatna, John Adler
Jurusan Teknik Komputer Unikom, Bandung
[email protected], [email protected]
ABSTRAK
Teknologi pemindaian objek adalah teknologi yang menggabungkan kemampuan hardware untuk melihat objek dan kemampuan software yang digunakan untuk mengolah data yang diterima oleh hardware tersebut. Sistem ini akan menerima data gambar dua dimensi (2D) yang berupa garis tipis, lalu secara otomatis software akan mengolah garis tipis tersebut dan menjadikannya sebagai objek tiga dimensi (3D). Proses manufaktur tradisional meliputi desain, analisis dan uji prototipe membutuhkan waktu yang sangat lama dan secara ekonomis mahal. Sedangkan dengan cara scanning 3D maka proses desain, analisis dan simulasi dapat dilakukan secara bersamaan, terintegrasi dan sangat cepat. Kesalahan yang terjadi dapat langsung terlihat dan diperbaiki. Pembuatan 3D Scanning inimenggunakan metode triangulasi laser dengan menggunakan perangkat keras webcam, line laser dan motor stepper. Dimana posisi line laser ditembakan ke arah objek yang berputar dan webcam berfungsi menangkap pantulan sinar laser. Sedangkan motor stepper berguna untuk menggerakan piringan tempat wadah objek berputar. Kemudian hasil akan diproses oleh program processing yang akan menghasilkan point cloud yang selanjutnya diproses oleh program 3D reshaper untuk proses meshing (proses mengkuliti permukaan objek). Hasil dari pengujian alat ini akan mampu mengenali sesuatu objek dengan cukup baik asalkan objek tersebut mempunyai bahan yang tidak bisa memantulkan sinar dari laser dan memiliki tingkat kerumitan yang cukup tinggi, sedangkan pengujian terhadap objek bangun datar menghasilkan pemodelan yang cukup baik.
Kata kunci: pemodelan objek, 3D scanning, processing, point cloud, meshing.
I. PENDAHULUAN
Seiring dengan berkembangnya teknologi yang semakin maju dan kompetitif telah membawa dampak bagi bidang ilmu pengetahuan terutama pada bidang pemindaian objek dengan komputer. Teknologi pemindaian objek ini adalah teknologi yang menggabungkan kemampuan hardware untuk melihat objek dan kemampuan software yang digunakan untuk mengolah data yang diterima oleh hardware tersebut. Sistem pemindaian objek ini akan menerima data gambar dua dimensi (2D) yang berupa garis tipis yang diterima dari sinar laser, lalu secara otomatis software akan mengolah garis tipis tersebut dan menjadikannya sebagai objek tiga dimensi (3D). Scanning 3D adalah proses menangkap informasi digital tentang bentuk objek dengan peralatan yang menggunakan laser atau cahaya untuk mengukur jarak antara scanner dan objek. Scanning 3D juga dikenal sebagai pencitraan 3D, Laser Scanning. Scanning 3D dapat menangkap data objek yang sangat kecil sampai pesawat ukuran penuh dan bangunan. Hal ini dapat digunakan untuk kebutuhan modifikasi, manufaktur, monitoring yang
dibantu komputer, atau hanya menyimpan informasi bentuk objek untuk kebutuhan di masa depan.
II. TEORI PENUNJANG 2.1 3D Scanning
2 scanner 3D. Ada banyak metode yang berbeda
untuk menangkap pengukuran 3D dari segi komponen yang di gunakan dan dengan demikian, ada beberapa jenis scanner yaitu:
2.1.1 White Light Scanning
[image:14.595.77.263.266.391.2]White Light Scanning (Structured Light Scanning) digunakan untuk menggambarkan berbagai perangkat pemindaian 3D. Teknik dasarnya adalah untuk memproyeksikan pola yang dikenali oleh cahaya (biasanya putih) dan menggunakan sensor (kamera biasanya charge coupled device) untuk menangkap gambar dari objek.
Gambar 1. Diagram sistem structured light scanning
Pada gambar 1 dijelaskan bagaimana cara kerja sistem structured light scanning sebuah cahaya di tembakan pada layar projector yang berpola dan akan menghasilkan bayangan yang berpola juga yang selanjutnya akan di tangkap oleh sebuah camera dan baseline adalah jarak konstan antara projector dan camera.
2.1.2 Photogrammetry
Photogrammetri adalah teknologi berbasis pada standar fotografi dan geometri proyektif. Prinsip photogrammetri adalah mengambil beberapa gambar dari objek secara manual atau otomatis. Poin dapat ditambahkan secara otomatis atau manual untuk membuat pengukuran 3D dari unsur-unsur yang diinginkan dari objek.
2.1.3 Machine Vision
Machine Vision umumnya digunakan untuk mendeteksi dua dimensi informasi, seperti barcode untuk memilah paket. Di mana sepasang sensor ditempatkan pada jarak yang diketahui dari objek untuk mengambil dua gambar secara bersamaan. Gambar yang dihasilkan digabung untuk menciptakan titik
korespondensi antara gambar. Pergeseran posisi dari pencocokan poin dikenal sebagai perbedaan posisi dan dengan menghitung perbedaan dari setiap titik dari dua gambar tersebut pengukuran 3D dari seluruh bagian dapat dibuat.
2.1.4 Coordinate Measuring Machine
Coordinate Measuring Machine lebih sering disebut sebagai CMMS(Coordinate Measuring Machine System) berfungsi untuk mengukur perangkat yang menggunakan probe yang bergerak. Posisi probe dilacak dengan serangkaian encoders di tiap poros mesin. Encoders ini, disebut sebagai pita ukur digital karena dapat melacak gerakan pengukuran probe sampai ukuran nanometer.
2.1.5 Desctructive Slicing
Desctructive slicing adalah sebuah proses dimana beberapa gambar yang diambil dari sebuah objek di lokasi yang tetap atau irisan tipis dari objek yang dihapus di antara masing-masing gambar. Jarak ke objek dikontrol secara tepat, sehingga skala masing-masing gambar diketahui. Setelah mengiris semua jalan yang dilalui objek, gambar akan menumpuk dalam software capture yang akan menghasilkan model 3D objek.
2.1.6 3D CT Atau Mri Scanning
3D CT atau MRI scan diperoleh dengan menumpukan serangkaian CT (computed tomography) atau MRI (Magnetic Resonance Imaging) scan pada satu sama lain dalam perangkat lunak. Hal ini biasanya dilakukan dengan tepat untuk mengontrol langkah-langkah di setiap CT sectional scan atau MRI. Data yang dihasilkan adalah model 3D dari objek dan berisi semua pengukuran fisik.
2.1.7 Theodolite
Sebuah perangkat Theodolite adalah sebuah teleskop yang dipasang pada dua buah sumbu yang berputar. Sudut suatu benda dipindai dan dengan mengambil pengukuran sudut dari berbagai lokasi, jarak ke objek dapat diperoleh. Theodolites modern dikendalikan secara otomatis oleh komputer untuk mengukur target.
2.1.8 Trackers
3 Beberapa teknik digunakan untuk memindai
termasuk laser, posisi magnet dan posisi optik. Berbagai metode untuk memindai posisi dari perangkat 3D scanning, merekam posisi setiap kali pemindaian diambil baik dengan menyentuh objek atau dengan menggunakan teknologi pemindaian non-kontak.
2.1.1 3D Laser Scanning
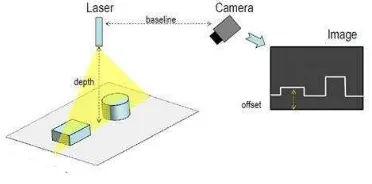
[image:15.595.316.523.73.132.2]3D Laser Scanning atau Laser Scanner 3D umumnya dapat dikategorikan menjadi tiga kategori utama yaitu triangulasi laser, Time of flight laser scanner dan pergeseran fasa. Selain itu ada berbagai teknologi laser scanning lain yang hybrid atau kombinasi dari teknologi pemindaian 3D lainnya seperti accordion fringeinterferometry atau conoscopic holography. Triangulasi Laser dilakukan dengan memproyeksikan garis laser atau titik ke sebuah objek dan kemudian menangkap refleksinya dengan sensor yang terletak pada jarak yang dikenal dari sumber laser.
Gambar 2. Diagram sistem triangulasi laser Pada gambar 2 dijelaskan bagaimana cara kerja sistem triangulasi laser sebuah laser ditembakan pada permukaan objek yang selanjutnya akan ditangkap oleh sebuah kamera, laser berfungsi untuk menandai permukaan objek dan memanfaatkan kamera untuk mencari lokasi dan kedalaman titik laser sedangkan baseline adalah jarak konstan antara projector dan kamera.
Time of flight laser scanner memancarkan pulsa cahaya laser yang terpantul dari objek yang akan dipindai. Refleksi yang dihasilkan dideteksi dengan sensor dan waktu yang berlalu antara pancaran dan deteksi menghasilkan jarak ke objek sejak kecepatan sinar laser terdeteksi.
Gambar 3. Diagram sistem Time of flight laser scanner
[image:15.595.319.524.287.345.2]Pergeseran fasa laser scanner bekerja dengan membandingkan pergeseran fasa pantulan sinar laser ke fasa standar, yang juga ditangkap untuk di bandingkan. Hal ini mirip dengan teknik Time of flight kecuali bahwa fasa sinar laser yang dipantulkan dapat memperhalus jarak deteksi, mirip dengan vernier scale pada sebuah caliper.
Gambar 4. Diagram sistem Pergeseran fasa laser scanner
III. PERANCANGAN SISTEM
Perancangan sistem merupakan rancangan bagaimana alat dapat bekerja dengan sistematis.
Gambar 5 . Blok diagram sistem Dari gambar 5 di atas, modul laser berperan untuk menandai objek yang akan di capture oleh webcam, sedangkan mikrokontroler bertugas untuk memberikan perintah kepada motor stepper yang berfungsi untuk menggerakan piringan tempat wadah objek berputar. Kemudian komputer akan mengolah informasi yang telah di hasilkan oleh webcam.
Webcam berfungsi sebagai penerima dari sistem ini, webcam diletakan berhadapan dengan objek yang akan dipindai.
[image:15.595.81.267.377.469.2]4 (platter), modul penggerak terdiri dari motor
[image:16.595.75.278.72.202.2]stepper unipolar 4 phase, ic driver tipe uln2803.
Gambar 6. Skematik modul penggerak
Modul Laser berfungsi sebagai sumber cahaya yang berperan untuk menandai objek yang akan dicapture oleh webcam.
Mikrokontroler ATMEGA32u4 berfungsi sebagai pengolah data serta mengontrol webcam dan stepper.
Tabel 1. Penggunaan pin I/O ATMEGA32u4
No
pin
Fungsi
Keterangan
8 I/O Kendali gerak stepper 9 I/O Kendali gerak stepper 10 I/O Kendali gerak stepper 11 I/O Kendali gerak stepper
Perancangan perangkat lunak pada pembuatan alat ini sistem akan memindai objek menggunakan laser, pemindaian dilakukan dengan memutar objek sebesar 360o. Proses pemindaian setiap derajatnya akan ditangkap dan hasilnya akan disimpan di dalam komputer, proses pemindaian akan menggunakan program bernama processing. Setelah seluruh gambar tersimpan maka akan dilakukan pemrosesan gambar oleh 3Dreshaper, kemudian gambar akan direkonstruksi menjadi bentuk objek tiga dimensi.
[image:16.595.341.452.72.260.2]Diagram alur pergerakan stepper Algoritma ini akan melakukan pengecekan pada komunikasi serial di mikrokontroler, apabila ada data di komunikasi serial dan nilai nya 78 ASCII (‘N’) maka mikrokontroler akan memberikan nilai high untuk menggerakan stepper dan apabila data serial bernilai 70 ASCII (‘F’) maka mikrokontroler akan memberikan nilai low sehingga stepper tidak akan bergerak.
Gambar 7. Flowchart pergerakan stepper
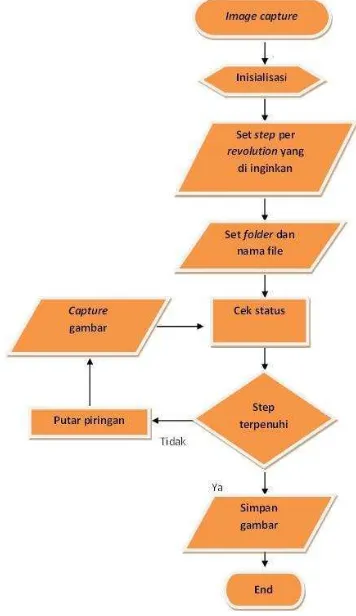
[image:16.595.328.506.373.681.2]Diagram alur image capturing ini pada awalnya akan memberikan input berupa step per revolution yang akan digunakan, nilai step per revolution ini akan menentukan banyaknya jumlah gambar yang dihasilkan.
Gambar 8. Flowchart image capture
5 terang disetiap baris maka program akan
mencari jarak antara tengah gambar dan pixel yang terang disetiap baris yang akan menghasilkan koordinat polar dan selanjutnya koordinat polar tersebut akan di konversi ke dalam koordinat kartesian XYZ untuk di simpan sebagai point cloud file ASC.
[image:17.595.74.270.172.441.2]
Gambar 9. Flowchart pengolahan gambar
Proses mesh adalah proses membuat point cloud (titik koordinat) menjadi terlihat solid dengan membuat point cloud mempunyai kulit, proses mesh di mulai dengan mengurangi noise yang terjadi pada saat proses scanning dan selanjutnya tinggal melakukan proses point cloud to mesh, bila sudah objek akan terlihat telah memiliki kulit tapi masih terlihat kasar maka dilakukanlah proses smoothing.
Gambar 10. Flowchart proses mesh
IV. HASIL PENGUJIAN DAN ANALISA 4.1 Hasil Kerja Alat
Alat 3D scanning ini menggunakan stepper unipolar yang menghasilkan sudut 3,75o per step nya, sehingga untuk memindai objek secara keseluruhan (360o) dibutuhkan
= 96 step untuk memindai objek. 4.2 Data Hasil Percobaan
Berdasarkan hasil pengujian yang dilakukan Proses pemindaian objek dapat terpengaruh oleh sumber cahaya lain selain laser, oleh karena itu, proses pemindaian harus dilakukan di ruangan yang gelap tanpa adanya cahaya yang kasat mata atau dapat juga dilakukan di ruangan yang terang (ada sumber cahaya) tetapi sistem laser scanner harus ditutupi oleh kotak pelindung (chamber) untuk mencegah cahaya ruangan mengganggu proses pemindaian. Cahaya yang mendekati atau melampaui intensitas cahaya laser akan menimbulkan noise yang merusak hasil rekontruksi objek.
4.2.1 Pengujian Hasil Rekontruksi Terhadap Bentuk Dan Bahan Objek
Pengujian berikut membandingkan kualitas hasil rekontruksi terhadap bentuk objek yang akan dipindai.
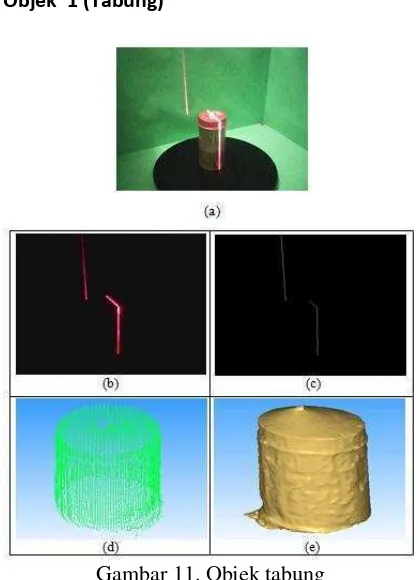
[image:17.595.314.523.465.755.2]Objek 1 (Tabung)
[image:17.595.73.226.608.755.2]6
Dari hasil pengamatan tabung di atas terlihat bahwa
Objek yang dipindai ini berbahan aluminium, objek ini dapat dipindai dengan cukup baik karena permukaan objek dapat memantulkan sinar laser dengan baik (a), proses saat scanning dan foto sesudah menjadi siluet (b-c).
Pengaruh bentuk dan bahan objek tidak terlalu menghasilkan perbedaan yang signifikan terhadap hasil rekontruksi. Hal ini dapat dilihat dari hasil rekontruksi yang cukup baik karena point cloud dapat membentuk objek tabung (d).
Permukaan objek yang berada di atas sedikit mengalami perubahan karena posisi sinar laser terlihat tidak datar pada saat proses scanning (e).
[image:18.595.314.524.178.549.2]Objek 4 (Bebek plastik)
Gambar 12. Objek bebek
Dari hasil pengamatan bebek plastik di atas terlihat bahwa
Objek yang dipindai ini berbahan plastic solid, objek ini dapat dipindai dengan cukup baik karena permukaan objek dapat memantulkan sinar laser dengan baik (a), proses saat scanning dan foto sesudah menjadi siluet (b-c).
Pengaruh bentuk objek cukup
mempengaruhi hasil rekontruksi. Hal ini dapat dilihat dari hasil rekontruksi yang kurang baik (d).
Permukaan objek yang berada di atas tidak terkena sinar laser karena sudut penempatan laser yang tidak dapat menjangkau bagian atas objek bebek sehingga pada saat rekontruksi permukaan bagian atas tidak terrekontruksi dengan baik (e).
[image:18.595.74.279.349.640.2]Objek 7 (Prisma segienam)
Gambar 13. Objek prisma segienam Dari hasil pengamatan prisma segienam di atas terlihat bahwa
Objek yang dipindai ini berbahan plastik yang tembus pandang, objek ini tidak dapat dipindai dengan cukup baik karena bahan objek tidak dapat memantulkan sinar laser dengan baik (a), proses saat scanning dan foto sesudah menjadi siluet (b-c).
7
Permukaan objek tidak memantulkan cahaya laser sebaliknya permukaan objek menyerap cahaya laser (e).
[image:19.595.76.274.137.497.2]Objek 8 (Prisma segitiga)
Gambar 14. Objek prisma segitiga Dari hasil pengamatan prisma segitiga di atas terlihat bahwa
Objek yang dipindai ini berbahan plastic solid, objek ini dapat dipindai dengan cukup baik karena permukaan objek dapat memantulkan sinar laser dengan baik (a), proses saat scanning dan foto sesudah menjadi siluet (b-c).
Pengaruh bentuk dan bahan objek tidak terlalu menghasilkan perbedaan yang signifikan terhadap hasil rekontruksi. Hal ini dapat dilihat dari hasil rekontruksi yang cukup baik (e-g), karena point cloud dapat membentuk objek prisma segitiga (d).
V. KESIMPULAN DAN SARAN 5.1 Kesimpulan
Dari percobaan yang dilakukan terhadap 11 objek dipindai dipilih 4 objek yang mewakili bahan dan bentuk dari 7 objek yang lain. Alat 3D scanning ini mampu merekontruksi objek yang dipindai. Bentuk dan bahan sangat mempengaruhi detail dari permukaan objek yang direkontruksi, bila bahan objek terbuat dari sesuatu yang menyerap cahaya laser maka objek tidak akan terrekontruksi. Sudut penempatan antara webcam dan laser mempengaruhi hasil dari scanning karena pada objek tertentu ada bagian objek yang tidak tertangkap.
5.2 Saran
Untuk pengembangan alat ini disarankan untuk menggunakan webcam dua sisi untuk mencegah kehilangan informasi pantulan sinar laser, penempatan webcam dan laser sebaiknya flexible, menggunakan metode 3D scanning yang lebih baik dan disarankan webcam dan laser yang berputar mengelilingi objek untuk menghasilkan point cloud yang lebih sempurna.
VI. DAFTAR PUSTAKA
[1]. GSVideo library (http://gsvideo.sourceforge.net/), diakses 19 oktober 2013
[2]. Low cost 3D Laser Scanning Unit with application to Face Recognition (http://cs.technion.ac.il/~twerd/Undergrad -2005.pdf), diakses pada 19 oktober 2014 [3]. Syahrul, 2012, Mikrokontroler AVR
ATMEGA8535. Bandung: Informatika. [4]. Margolis,M,(2012).Arduino cookbook,
second edition.O’Reilly Media Inc, USA.
[5]. http://warnercnr.colostate.edu/~lefsky/ispr /1133.pdf, diakses 19 0ktober 2014 [6].
http://makezine.com/projects/diy-3d-laser-scanner-using-arduino/, diakses 19 oktober 2014
[7]. http://sriyuli.wordpress.com/matematika-
vi
KATA PENGANTAR
Segala puji bagi Allah SWT, Pencipta dan Pemelihara alam semesta,
shalawat serta salam semoga terlimpah bagi Muhammad SAW, beserta keluarga
dan para pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT, ahirnya penulis dapat menyelesaikan Tugas
Akhir ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti. Tugas
akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sulit terlaksana
tanpa batuan banyak pihak yang tak mungkin Penulis sebutkan satu persatu,
namun dengan segala kerendahan hati, Penulis mengucapkan terima kasih kepada
1.
Kedua orang tua dan keluarga yang telah memberikan motivasi dan doa untuk
kelancaran pembuatan Tugas Akhir ini.
2.
Bapak Dr.Wendi Zarman,M.Si selaku Ketua Jurusan Teknik Komputer dan
selaku wali kelas 09 TK 03 jurusan teknik komputer yang banyak
memberikan masukan saat berkuliah di Universitas ini..
3.
Bapak John Adler,M.Si selaku pembimbing yang selalu memberikan
masukan dalam penyelesaian Tugas Akhir ini.
4.
Bapak dan ibu staff dosen jurusan teknik kompoter yang telah mengajarkan
penulis ilmu yang bermanfaat.
5.
Teman - teman 09 Tekom 03 yang selalu memberikan semangat dalam
menyelesaikan Tugas Akhir ini
Akhirnya, Penulis berharap semoga penelitian ini menjadi sumbangsih
yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin
keilmuan yang Penulis dalami.
Bandung,5 maret 2015