Nama lengkap : Ridwan Taufik
Tempat, Tanggal Lahir : Bandung, 20 Mei 1992
Alamat : Komp. Sanggarmas Lestari F-23 Banjaran Agama : Islam
Fakultas / Program Studi : Teknik dan Ilmu Komputer/Sistem Komputer
Perguruan Tinggi : Universitas Komputer Indonesia E-mail : [email protected]
Pendidikan Formal
1998-2003 : SDN Jelekong
2003-2006 : SMPN 1 Baleendah Bandung
2006-2009 : SMAN 7 Bandung
2009-2013 : Universitas Komputer Indonesia, Bandung
Pengalaman Kerja
Asisten di Laboratorium Sistem Digital UNIKOM tahun 2011-2012.
Bendahara HIMA TEKKOM UNIKOM tahun 2010-2011.
Hobi dan Minat
Berkendara
Fotografi
MENGGUNAKAN SENSOR FLEX
TUGAS AKHIR
Disusun untuk memenuhi syarat kelulusan pada Program Studi Strata Satu Sistem Komputer
Oleh :
RIDWAN TAUFIK
10209055
Pembimbing : Hidayat, M.T
JURUSAN TEKNIK KOMPUTER
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
vi
Segala puji bagi Allah SWT., Pencipta dan Pemelihara alam semesta, shalawat serta salam semoga tercurah bagi Muhammad SAW, keluarga dan para pengikutnya yang setia hingga akhir masa.
Atas rahmat Allah SWT., akhirnya penulis dapat menyelesaikan Tugas Akhir ini, meskipun proses belajar sesungguhnya tak akan pernah berhenti. Tugas Akhir ini sesungguhnya bukanlah sebuah kerja individual dan akan sangat sulit terlaksana tanpa bantuan banyak pihak yang tak mungkin Penulis sebutkan satu persatu, namun dengan segala kerendahan hati, penulis mengucapkan terima kasih kepada.
1. Ibu, Bapak, Kakak-adik serta kepada Keluarga Besarku Tercinta yang
senantiasa memberikan kasih sayang, do’a dan dorongan moril maupun
materil selama penulis menempuh pendidikan.
2. Bapak Prof, Dr. H. Denny Kurniadie, Ir, M.Sc. selaku Dekan Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia.
3. Bapak Dr. Wendi Zarman, M.Si selaku Ketua Jurusan Teknik Komputer Universitas Komputer Indonesia.
4. Bapak Hidayat, M.T., selaku pembimbing yang telah banyak memberikan arahan, saran serta bimbingan.
5. Bapak Ayub Subandi, S.Si., MT. selaku dosen wali penulis.
6. Bapak dan ibu dosen di Jurusan Teknik Komputer Universitas Komputer Indonesia, yang telah banyak memberikan ilmu, wawasan motivasi serta bimbingannya, baik secara akademik maupun non akademik.
7. Seluruh staf administrasi di Jurusan Teknik Komputer, terima kasih atas segala pelayanan akademik.
8. Teman-teman seperjuangan di Jurusan Teknik Komputer, khususnya kelas 09 TK 02 terima kasih atas kebersamaannya, semoga dapat menjaga tali silaturahmi yang telah terjalin ini.
10.Semua orang yang telah membantu penulis dalam mengerjakan Tugas Akhir ini yang tidak bisa disebutkan satu persatu.
Akhirnya, penulis berharap semoga penelitian ini menjadi sumbangsih yang bermanfaat bagi dunia sains dan teknologi di Indonesia, khususnya disiplin keilmuan yang penulis dalami.
Bandung, Januari 2014
viii
1.4 Metode Pelaksanaan ... 2
1.5 Sistematika Penulisan ... 2
BAB II TEORI PENUNJANG ... 4
2.1 Komponen Struktur Lengan ... 4
2.1.1 Manipulator ... 4
2.1.2 Desain ... 4
2.2 Mikrokontroler ATmega16 ... 5
2.2.1 ADC Mikrokontroler ... 9
2.2.2 Potr I/O ... 11
2.2.2 Port Komunikasi Serial ... 11
2.3 Sensor Flex ... 12
2.4 Pembagi Tegangan ... 13
2.5 Potensiometer (Joystick) ... 14
2.6 Motor Servo ... 15
2.7 Driver Motor DC L298 ... 17
2.8 Motor DC ... 18
2.9 Modul Wireless ... 18
2.10 Pemrograman BASCOM ... 20
ix
3.1 Perancangan Perangkat Keras ... 23
3.2 Perancangan Alat ... 25
3.3 Perancangan Program ... 38
3.3.1 Algoritma Pemrograman Mikrokontroler 1 ... 38
3.3.2 Algoritma Pemrograman Mikrokontroler 2 ... 40
BAB IV PENGUJIAN DAN ANALISA ... 42
4.2 Pengujian Persendian1 Motor Servo ... 50
4.3 Pengujian Persendian2 Motor Servo ... 52
4.4 Pengujian Persendian3 Motor DC ... 55
BAB V KESIMPULAN DAN SARAN ... 57
5.1 Kesimpulan ... 57
5.2 Saran ... 57
59
[1] Anonim. (2002). 8bit AVR Microcontroller With 16K Bytes In-System
Programmable Flash. Diakses 15 Oktober 2013, dari http://pdf1.alldatasheet
.com/datasheet.pdf/view/78532/ATMEL/ATMEGA16.html
[2] Prasad, M. (2011). The ADC of The AVR. Diakses 10 Januari 2014, dari http://maxembedded.com/2011/06/20/the-adc-of-the-avr/
[3] Hamalainen, J. (2004). Edward Sensor Hands:The Techno Gloves. Diakses 10 Januari 2014, dari http://www.tufts.edu/programs/mma/emid/ projectreportsS04/
[4] Anonim. Flex Sensor. Diakses 17 Desember 2013, dari https://www.sparkfun.com/datasheets/Sensors/Flex/flex22.pdf
[5] Malvino, Albert Paul. (1993). Elektronic Principles / Albert Paul Malvino -5th ed. McGRAW-HILL International Edition.
[6] Elektronika Dasar (2012). Motor Servo. Diakses 16 Desember 2013, dari http://elektronika-dasar.web.id/teori-elektronika/motor-servo/
[7] Anonim. (2000). Dual Full-Bridge Driver L298. Diakses 20 November 2013 dari http://www.alldatasheet.com/datasheet.pdf/pdf/22437/STMICR
OELECTRONICS/L298.html
[8] eBLDC. DC Motor Control Basics. Diakses 10 Januari 2014, dari http://ebldc.com/?p=34
[9] Anonim. (2010). Xbee-PRO ZB RF Modules. Diakses 16 Desember 2013, dari http://www.cytron.com.my/usr_attachment/XBee%20ZB-S2%20DS.pdf [10]Setiawan Afrie. (2011). 20 Aplikasi Mikrokontroler ATMega8535 &
1 1.1 Latar Belakang
Saat ini penelitian di dunia robotika terus berkembang. Penggunaan robot dilakukan untuk meningkatkan efisiensi pekerjaan yang dilakukan manusia dan juga selain untuk meningkatkan efisiensi, juga untuk mengurangi resiko kecelakaan kerja pada pekerjaan yang menuntut tingkat resiko yang cukup tinggi. Salah satu penelitian didunia robotika yaitu tentang lengan jari robot, yang saat ini banyak dikembangkan. Kecerdasan yang ditanamkan di dalam suatu robot tangan, diharapkan dapat bermanfaat dalam pengaplikasiannya di dunia luar apabila dikembangkan untuk suatu pekerjaan tertentu akan memungkinkan untuk mengontrol suatu mesin oleh alat yang dimaksud dan ini merupakan buah dari perkembangan ilmu pengetahuan dan teknologi digital yang sangat membantu bagi kehidupan dunia luas.
Berdasarkan paparan di atas, penulis tertarik untuk melakukan penelitian tentang perangkat hardware berupa bentuk lengan manusia dengan menggunakan perancangan hardware dan menerapkan unsur kecerdasan didalamnya. Pembuatan hardware yang meniru lengan ini selain dimaksudkan untuk pengaplikasian
kecerdasan ke dalam hardware, pembuatannya pun merupakan simulasi gerak hardware layaknya gerak tangan manusia pada umumnya. Terdapat lima jari
seperti yang dimiliki jari manusia. Tiap jari memiliki tiga poros yang memungkinkan jari dapat menekuk dan membuka. Mikrokontroler yang digunakan adalah ATmega16 yang akan mengatur 5 motor servo yang masing-masing menggerakkan kelima jari dalam menekuk atau membuka.
1.2 Maksud dan Tujuan
Adapun tujuan dari perancangan alat ini sebagai aplikasi kontrol yang mampu bekerja meniru sesuai gerak dari tangan pengendali.
1.3 Batasan Masalah
Adapun batasan masalah yang akan dibahas pada perancangan alat ini meliputi:
1. Mikrokontroler yang digunakan adalah ATMega16 sebagai pengolah data. 2. Sensor yang digunakan adalah sensor flex sebagai pengendali gerak pada
masing-masing jari.
3. Transmisi data menggunakan media wireless.
4. Kendali pergelangan dan persendian lengan robot menggunakan potensiometer.
5. Jari-jari tangan menggunakan konstruksi yang tersedia
1.4 Metode Penelitian
Perancangan dalam pembuatan tugas akhir ini dilakukan beberapa tahap, yaitu :
1. Studi pustaka berupa literatur, mengumpulkan bahan yang akan dijadikan tugas akhir dari buku-buku teks.
2. Perumusan dan identifikasi masalah yang akan diselesaikan. 3. Perancangan alat berupa hardware dan software.
4. Pengujian alat.
5. Analisis data yang didapat dari hasil pengujian alat. 6. Kesimpulan yang diambil dari penelitian yang dilakukan.
1.5 Sistematika Penulisan
Untuk mempermudah penulisan Laporan Tugas Akhir ini, maka terdapat pembagian dalam sistematika penulisan yang terdiri dari beberapa bab. Urutan bab laporan ini adalah sebagai berikut:
Pada bab ini berisi latar belakang pemilihan judul, maksud dan tujuan, perumusan masalah, metode penulisan, serta sistematika penulisan.
BAB II LANDASAN TEORI
Pada bab ini membahas tentang semua landasan teori yang berhubungan dengan perancangan alat.
BAB III PERANCANGAN SISTEM
Dalam bab ini menjelaskan perancangan hardware, alat dan komponen yang digunakan.
BAB IV PENGUJIAN DAN ANALISA
Dalam bab ini akan dibahas mengenai pengujian alat dan perhitungan matematis dan prinsip kerja dari alat.
BAB V KESIMPULAN DAN SARAN
4 2.1 Komponen Struktur Lengan
Komponen utama lengan secara keseluruhan terbagi menjadi tiga bagian, yaitu manipulator, sistem mekanik, dan sistem kontrol.
2.1.1 Manipulator
Manipulator adalah bagian mekanik yang berfungsi untuk memindahkan,
mengangkat, dan memanipulasi benda bekerja.
Gambar 2.1. Diagram struktur Lengan
Fungsi alat tergantung dari jenis end effector yang dipasang pada manipulator. End effector bisa berupa perangkat pengelasan, pengecatan,
peralatan mesin ataupun gripper yang memiliki rahang yang dapat bergerak membuka dan menutup.
2.1.2 Desain
Desain sistem mekanik menggambarkan bagaimana bentuk dari tangan dan jenis komponen yang harus digunakan.
a) Desain Mekanik
Jumlah batang (link) Jumlah sambungan (joint)
Ukuran dan pergerakan tiap batang (derajat kebebasan/DOF) b) Klasifikasi Gerak
Menurut arah pergerakannya, gerak dapat dibedakan menjadi dua jenis gerak, yaitu: [3]
Gerak Translasi atau Linear Gerak Rotasi
c) Transmisi Gerak
Secara umum ada dua tipe transmisi gerak, yaitu transmisi gerak rotasi ke rotasi dan transmisi gerak rotasi ke linear. [3]
Transmisi gerak rotasi ke rotasi terkait pada aspek penting yaitu roda gigi ideal yang berarti roda gigi benar-benar bulatan penuh, berputar pada titik tengah, dan juga tanpa inersia (inertialess). Permukaan antar roda gigi tidak terjadi gaya gesek sehingga menimbulkan gerigi-gerigi.
Transmisi gerak rotasi ke linear ada beberapa komponen yang dapat menghasilkan konversi gerak rotasi ke linear, salah satunya adalah mur dan baut (screw), dan rack pinion.
d) Sistem Penggerak
Actuator atau penggerak adalah komponen penggerak suatu sistem yang
diklasifikasikan menjadi beberapa tipe sesuai dengan prinsip penghasil geraknya, yaitu penggerak elektrik (motor DC, motor servo, motor stepper, motor AC, dan lain-lain), penggerak pneumatic (berbasis kompresi gas: udara, nitrogen, dan lain-lain), dan penggerak hidrolik (berbasis kompresi benda cair: minyak pelumas, dan lain-lain). Terdapat beberapa kriteria yang perlu diperhatikan dalam pemilihan jenis actuator, antara lain: torsi, arus atau daya (power supply), ukuran, dan kecepatan respon actuator. [3]
2.2 Mikrokontroler ATMega16
mikroprosesor yang berfungsi sebagai proses data. Mikrokontroler AVR (Alf and
Vegard’s Risc processor) memiliki arsitektur 8 bit, dimana semua instruksi
dikemas dalam kode 16 bit dan sebagian besar instruksi dieksekusi dalam 1 siklus clock atau dikenal dengan teknologi RISC (Reduced Instruction Set Computing). Secara umum, AVR (Alf and Vegard’s RISC processor) dapat dikelompokan ke dalam 4 kelas, yaitu keluarga AT90Sxx, keluarga ATMega dan AT86RFxx. Pada dasarnya yang membedakan masing-masing adalah kapasitas memori, peripheral dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan semuanya bisa dikatakan hampir sama.
ATmega16 adalah mikrokontroler AVR dengan fitur lengkap dan jumlah port I/O yang mencukupi. Mikrokontroler ini memiliki 40 kaki (dual-inline
Package) tetap digunakan untuk diaplikasikan pada sistem yang membutuhkan
Gambar 2.2. Blok Diagram ATmega16 [1]
Pada gambar blok diagram mikrokontroler ATmega16 di atas terdapat fitur – fitur sebagai berikut :
Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi 16MHz.
Memiliki kapasitas flash memori 16 Kbyte, EEPROM 512 byte dan SRAM 1 Kbyte.
Saluran I/O sebanyak 32 buah yaitu PortA, PortB, PortC dan PortD. CPU yang terdiri atas 32 buah register.
Unit interupsi internal dan eksternal. Port USART untuk komunikasi serial.
Gambar 2.3. Konfigurasi Pin ATmega16 r [1]
Keterangan konfigurasi Pin ATMega16 adalah sebagai berikut : [1] a) Vcc : Power Supply
b) GND : Ground
memberikan 1 jika sebagai output. Selain itu, kedelapan pin portA juga digunakan untuk masukan sinyal analog bagi Analog/Digital converter. d) PORTB (PB0 – PB7) : portB digunakan sebagai sebuah port I/O
bidireksional 8-bit Output buffer PortB dapat memberi arus 20 mA dan dapat menyalakan display LED secara langsung. Data Direction Register portB (DDRB) harus diatur terlebih dahulu sebelum portB digunakan. Bit-bit DDRB diberikan 0 jika akan memfungsikan portB sebagai input, atau memberikan 1 jika sebagai output. Khusus PB6 dapat digunakan sebagai masukan Kristal (inverting oscillator amplifier) sedangkan khusus PB7 dapat digunakan output Kristal (output inverting oscillator amplifier).
e) PORTC (PC0 – PC5) : port I/O (PC5 – PC0) digunakan sebagai sebuah port I/O bidireksional Output buffer PortC dapat memberi arus 20 mA dan dapat menyalakan display LED secara langsung. Data Direction Register portC (DDRC) harus diatur terlebih dahulu sebelum portC digunakan. Bit-bit DDRC diberikan 0 jika akan memfungsikan portC sebagai input, atau memberikan 1 jika sebagai output. Selain itu, dua pin portC (PC6 dan PC7) juga memiliki fungsi alternatif sebagai oscillator untuk timer/counter 2. f) PORTD (PD0 - PD7) : port I/O 8-bit Output buffer PortD dapat memberi
arus 20 mA dan dapat menyalakan display LED secara langsung. Data Direction Register portD (DDRD) harus diatur terlebih dahulu sebelum portD
digunakan. Bit-bit DDRD diberikan 0 jika akan memfungsikan portD sebagai input, atau memberikan 1 jika sebagai output. Selain itu PD0 dan PD1 juga
memiliki fungsi sebagai pin komunikasi serial antara mikrokontroler dengan perangkat lain, PD0 sebagai penerima data dan PD1 sebagai pengirim data. Pada mikrokontroler ATmega16 ini terdapat beberapa fungsi yang digunakan untuk perancangan, yaitu : pin-pin ADC, portC, portD dan portB.
2.2.1 ADC Mikrokontroler
1. Memahami fitur spesifikasi yang tersedia pada mikrokontroler ATmega16 ini pada datasheet. Berikut ini adalah fitur spesifikasi ADC pada mikrokontroler ATmega16: [1]
Lebar resolusi ADC 10-bit
Integral Non-Linearity ADC sebesar 0.5 LSB Akurasi absolut pada LSB ±2 LSB
Waktu konversi sebesar 13 – 260 µs Memiliki 7 Input Kanal yang berbeda
Memiliki 2 Input Kanal dengan pilihan tambahan 10x dan 200x Rentang tegangan Input ADC antara 0 - Vcc (tegangan input) Pemilihan tegangan referensi ADC 2.56V
Free Running or Single Conversion Mode
ADC mulai mengkonversi otomatis setelah mendapat pemicu tegangan 2. Penjelasan tentang Resolusi ADC pada mikrokontroler ATmega16 terdapat
pada gambar di bawah ini :
Gambar 2.4. Resolusi ADC mikrokontroler [2]
Sepuluh bit resolusi yaitu nilai ADC memiliki rentang nilai 210 = 1024, artinya nilai ADC akan memiliki nilai antara 0 – 1023. Jika nilai analog yang menjadi input adalah 0 – 5 volt, maka konversi analog ke digital pada ADC akan memiliki nilai yang linier sebagai berikut: [2]
2.5 volt = 511 nilai ADC 5 volt = 1023 nilai ADC
3. Pengaturan ADC prescaler yaitu untuk menentukan frekuensi yang digunakan ADC pada saat melakukan konversi. Nilai frekuensi yang digunakan ADC tergantung pada frekuensi dari XTAL yang digunakan pada mikrokontroler. Nilai prescaler ADC yaitu 2, 4, 8, 16, 32, 64 dan 128. Umumnya ADC bekerja pada rentang frekuensi antara 50KHz sampai 200KHz. Untuk mendapatkan rentang frekuensi tersebut, maka frekuensi XTAL mikrokontroler dibagi oleh prescaler maka akan menghasilkan frekuensi kerja ADC. Seperti contoh mikrokontroler yang memiliki frekuensi XTAL 11 MHz, kemudian dipilih nilai prescaler 64 maka frekuensi ADC didapat:
Semakin rendah nilai frekuensi ADC yang didapat, maka akan semakin tinggi tingkat akurasi nilai hasil konversi yang dihasilkan. [2]
2.2.2 Port I/O
Port input/output digunakan sebagai jalur keluar masuk data mikrokontroler. Port yang digunakan sebagai input adalah portA, yaitu: PA0 – PA7 yang membaca input dari sensor flex. Port yang digunakan sebagai output adalah portB, portC dan portD. Cara menggunakan port output ini pada program utama menuliskan sintaks deklarasi “Config Portx.n = Output”. Keterangan sintaks tersebut adalah: “x” sebagai keterangan port yang digunakan (B, C atau D) dan “n” sebagai keterangan nomor port (0 – 7). Setelah deklarasi port tersebut, maka port output dapat digunakan. [1]
2.2.3 Port Komunikasi Serial
berkomunikasi dengan mikrokontroler lain, dengan perangkat komputer dan masih banyak perangkat lainnya. [1]
2.3 Sensor Flex
Gambar 2.5. Sensor Flex
Sensor flex adalah sensor gerak dengan cara kerja mengeluarkan perubahan resistansi akibat adanya perubahan lekukan pada kontur sensor. Sensor flex yang digunakan berukuran 4,5 inchi memiliki 2 kaki pin, dengan bentuk fisik tipis memanjang dan lentur. Sensor ini mengeluarkan output berupa resistansi. Dua pin kaki sensor tersebut, jika salah satu pin diberikan tegangan +5 volt maka pin yang lainnya sebagai output serta tegangan 0 volt. Prinsip kerja sensor flex ini mirip dengan variabel resistor. Sensor flex akan memberikan resistansi kepada mikrokontroler melalui rangkaian pembagi tegangan. [3]
Adapun spesifikasi yang terdapat pada sensor flex yaitu: [4] Resistansi flat 10Kohm ± 30 %
Rentang lengkungan kontur antara 45 KOhm – 125 KOhm
2.4 Pembagi Tegangan
Rangkaian pembagi tegangan berfungsi untuk membagi tegangan input pada bagian output tertentu. Persamaan pembagi tegangan adalah sebagai berikut: [5]
Gambar 2.7. Rangkaian Pembagi Tegangan
Dimana : = output tegangan yang dicari = resistor 1
2.5 Potensiometer (joystick)
Gambar 2.8. Potensiometer [4]
Potensiometer adalah salah satu jenis resistor dimana nilai resistansinya dapat diatur sesuai dengan kebutuhan rangkaian elektronika. Potensiometer termasuk kedalam jenis variabel resistor karena nilai output resistansinya dapat diubah-ubah. Struktur bentuknya terdiri dari 3 buah kaki pin dan tuas sebagai pengatur nilai resistansinya. Komponen elektronika ini jarang digunakan untuk mengendalikan daya tinggi secara langsung (> 1 watt). Biasanya hanya digunakan untuk menyetel sinyal tegangan analog dan pengendali input untuk rangkaian elektronik.
Gambar 2.9. Rangkaian Potensiometer
pergerakan pada jalur elemen resistif tadi. Pergerakan wiper pada jalur resistif inilah yang akan mengatur besar kecilnya nilai resistansi output pada sebuah potensiometer.
2.6 Motor Servo
Gambar 2.10. Motor Servo [6]
Motor Servo adalah sebuah motor dengan sistem closed feedback dimana posisi dari motor akan diinformasikan kembali pada rangkaian kontrol yang ada di dalam motor servo. Struktur perangkatnya terdiri dari sebuah motor, rangkaian gigi, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran yang dihasilkan. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirimkan melalui kaki sinyal yang telah disediakan. Motor servo biasanya hanya bergerak mencapai sudut tertentu saja dan tidak bergerak kontinyu seperti motor DC maupun motor stepper. Tetapi motor servo dapat dimodifikasi agar dapat bergerak kontinyu.
Pada sebuah robot, motor servo ini sering digunakan untuk bagian kaki, lengan dan bagian lainnya yang bergerak terbatas dan sangat membutuhkan torsi cukup besar. Motor servo bergerak dua arah, yaitu searah jarum jam dan berlawanan arah jarum jam. Arah dan sudut dari pergerakan rotornya dapat dikendalikan dengan memberikan pengaturan sinyal pulseout dari mikrokontroler pada pin bagian sinyal motor servo tersebut.
Berikut spesifikasi utama sebuah motor servo: [6]
Terdapat tiga kabel, yaitu: power, ground, control Sinyal kontrol mengendalikan posisi motor
Rangkaian internal terdapat gear, potensiometer, dan feedback control. Operasional motor motor servo dikendalikan oleh pulsa selebar ± 20 ms,
dimana lebar pulsa antara 0.5 ms sampai dengan 2 ms merupakan rentang sudut maksimum.
Operasional motor servo dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari kisaran sudut maksimum. Apabila motor servo diberikan pulsa dengan besar 1.5 ms mencapai gerakan 90o, sedangkan apabila diberikan pulsa kurang dari 1.5 ms maka posisi mendekati 0o dan apabila diberikan pulsa lebih dari 1.5 ms maka posisi mendekati 180o. [6]
Gambar 2.11. Kendali Motor Servo [6]
berlawanan arah jarum jam (Counter Clock wise, CCW) dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5 ms, maka rotor akan berputar searah jarum jam (Clock Wise, CW) dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan pada posisi tersebut. [6]
2.7 Driver Motor DC L298
Gambar 2.12. IC driver motor L298 [7]
2.8 Motor DC
Gambar 2.13. Motor DC [8]
Motor DC adalah Motor jenis motor yang menggunakan tegangan searah sebagai sumber tenaganya. Polaritas dari tegangan yang diberikan pada dua kaki tegangannya menentukan arah putaran motor. Pada gambar A dengan memberikan polaritas positif, maka motor akan berputar searah jarum jam. Bila polaritas dari tegangan tersebut dibalik seperti pada gambar B, maka arah putaran motor akan terbalik berlawanan arah jarum jam. Kecepatan putaran motor akan ditentukan oleh besarnya tegangan yang diberikan. Komponen motor DC memiliki 2 bagian dasar, yaitu bagian yang tetap/stasioner yang disebut stator. Stator ini menghasilkan medan magnet, baik yang dibangkitkan dari sebuah koil
(elektro magnet) ataupun magnet permanen, sedangkan bagian yang berputar disebut rotor, yaitu berupa sebuah koil dimana arus listrik mengalir. Gaya elektromagnet pada motor DC timbul saat ada arus yang mengalir pada penghantar yang berada dalam medan magnet. Medan magnet itu sendiri ditimbulkan oleh megnet permanen. Garis-garis gaya magnet mengalir diantara dua kutub magnet dari kutub utara ke kutub selatan. [8]
2.9 Modul wireless xbee pro S2
2,4 GHZ. Radio frekuensi transceiver ini merupakan sebuah modul yang terdiri dari RF transmitter dan RF receiver dengan sistem interface serial UART. [9]
Gambar 2.14. Modul Wireless [9]
Modul Zigbee ini mempunyai 20 pin (kaki) dengan koneksi minimum agar modul ini dapat bekerja adalah pin VCC (pin 1), GND (pin 10), DOUT (pin 2),dan DIN (pin 3). Tegangan VCC yang digunakan adalah 3,3 volt. Pin Tx dan Rx dari mikrokontroler dapat dikoneksikan langsung ke pin DIN dan DOUT pada Zigbee. Data yang masuk ke Zigbee melalui DIN akan disimpan terlebih dahulu di DI Buffer dan RF TX Buffer sebelum ditransmisikan melalui port antena menuju Zigbee lainnya. Begitu juga sebaliknya dengan data yang diterima melalui port antena. [9]
Fitur-fitur yang terdapat pada Xbee Seri 2 antara lain : [9] Xbee Pro S2 kabel antena
Xbee modul
Tegangan minimum 3,3 volt @ 40 mA
Mempunyai pin output yang sama dengan Xbee seri 1 Data rate maksimum 250 Kbps
Antar muka standart UART : 9600, 8-N-1 2mW output (+3 dBm)
Jarak jangkauan nirkabel sebesar 400ft (120m) 6 pin input @ 10-bit ADC
Berikut ini adalah gambaran mengenai penggunaan modul wireless Zigbee, yaitu:
Gambar 2.15. Modul Wireless
Gambar di atas adalah ilustrasi bagaimana cara penggunaan modul wireless pada salah satu mikrokontroler untuk mengirimkan data. Terdapat 4 pin
yang dihubungkan dari modul wireless pada mikrokontroler, pin Vcc modul wireless dihubungkan pada pin +5 volt mikrokontroler, pin Rx modul wireless
dihubungkan pada pin PD0 mikrokontroler, pin Tx modul wireless dihubungkan pada pin PD1 mikrokontroler dan pin ground modul wireless dihubungkan pada ground mikrokontroler.
2.10 Pemrograman BASCOM
Bascom dikembangkan oleh MCS Electronics dan merupakan Basic
Compiler. Program yang dibuat dalam bahasa Basic akan dikompilasi menjadi
machine code untuk kemudian dimasukkan ke dalam mikrokontroler melalui
sebuah pemrograman. Saat ini, sesuai dengan referensi dari situs web MCS elektronics, bascom baru mendukung mikrokontroler keluarga MCS51
Gambar 2.16. Tampilan awal BASCOM AVR [10]
BASCOM AVR merupakan salah satu tool untuk pengembangan atau pembuatan program untuk kemudian ditanamkan dan dijalankan pada mikrokontroler, terutama mikrokontroler keluarga AVR. BASCOM AVR disebut juga sebagai IDE (Integrated Development Environment) yaitu lingkungan kerja yang terintegrasi, karena selain tugas utamanya (melakukan kompilasi kode program menjadi file HEX / bahasa mesin), BASCOM AVR juga memiliki kemampuan atau fitur lain yang berguna sekali dimana sebagai terminal (monitoring komunikasi serial) dan sebagai programmer (untuk menanamkan program yang sudah dikompilasi ke mikrokontroler).
Pada Pembuatan sebuah program secara umum, dapat dibagi menjadi 3 bagian penting, yaitu :
1. Header Program
Header ditulis paling awal listing program yang dibuat. Bagian ini
menentukan mikrokontroler jenis dan tipe apa yang digunakan, menentukan baud rate yang akan digunakan dan mencantumkan nilai frekuensi XTAL yang digunakan pada mikrokontroler prosesor. Contoh sintaks sebagai berikut:
„$regfile = "m16def.dat" „$baud = 9600
„$crystal = 8000000
2. Deskripsi variable program
Pada bagian deskripsi variable harus mencantumkan keterangan port apa saja yang akan digunakan sebagai output, menentukan
konfigurasi fitur apa yang akan digunakan pada mikrokontroler, serta mencantumkan variable dengan tipe data yang akan digunakan. Contoh sintaks sebagai berikut:
„Config Servos = 2 , Servo1 = Portc.0 , Servo2 = Portc.1 , Reload = 10 „Config Portc.0 = Output
„Config Portc.1 = Output
„Config Adc = Single , Prescaler = Auto , Reference = Avcc Dim Jr1 As Word , Jr2 As Word
3. Program Utama
23 3.1 Perancangan Perangkat Keras
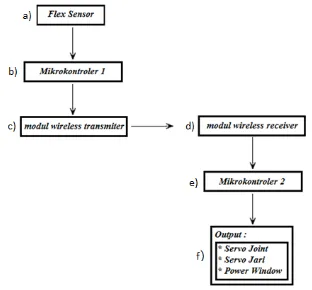
Pada tugas akhir ini, terdapat beberapa diagram blok yang akan menerangkan alat keseluruhan. Berikut adalah diagram blok secara keseluruhan:
Gambar 3.1. Diagram Blok Sistem
Keterangan blok diagram: a) Blok Sensor Flex
Sensor flex berfungsi sebagai pendeteksi gerakan pada sarung tangan yang dipakai oleh pengendali. Sensor ini akan menghasilkan output berupa resistansi ketika mendeteksi adanya gerakan berupa lengkungan jari pada pengontrol sarung tangan.
b) Blok Mikrokontroler 1.
Blok ini berfungsi sebagai penendali sistem secara keseluruhan. Sinyal input analog yang diterima mikrokontroler ini dihasilkan dari output sensor
digital yang akan dikirim pada mikrokontroler 2 melalui media transmisi wireless berupa pulseout untuk memberi sinyal kepada motor servo.
Selanjutnya motor servo menghasilkan gerak fisik (action) berupa putaran. c) Blok Modul Wireless Pengirim
Blok diagram ini berfungsi sebagai media transmisi atau media pengirim informasi data dari mikrokontroler 1 ke mikrokontroler 2.
d) Blok Modul Wireless Penerima
Blok diagram ini berfungsi sebagai penerima informasi yang dikirim oleh media transmisi dari mikrokontroler 1.
e) Blok Mikrokontroler 2
Blok diagram ini berfungsi sebagai penerima data informasi yang dikirim oleh mikrokontroler 1. Data informasi tersebut akan diolah menjadi pulseout untuk menggerakkan masing-masing motor servo dan motor DC.
f) Blok output (Motor Servo Jari).
Terdapat 5 buah motor servo untuk menggerakkan masing-masing jari. Pulseout yang diberikan mikrokontroler akan menggerakkan motor servo
sesuai dengan perintah dari mikrokontroler. g) Blok output (Motor Servo Persendian).
Blok diagram ini berfungsi sebagai penggerak persendian lengan robot. Bagian servo persendian terdapat dua motor servo, yaitu servo gerak horizontal dan servo gerak vertikal.
h) Blok output (Motor DC).
3.2 Perancangan Alat
3.2.1 Konsep Rangka
Gambar 3.2. Konsep Rangka
Pada gambar di atas dapat dilihat konstruksi keseluruhan dari perancangan alat yang akan dibuat. Gerak alat ini menyerupai sebagian gerak tangan manusia, seperti menggerakkan jari dan memutar pergelangan tangan. Gerak jari robot tangan akan sama dengan gerak jari tangan orang, yang dikendalikan melalui sarung tangan yang sudah terpasang sensor flex. Keterangan gambar konsep rangka diatas adalah sebagai berikut:
a) Motor Servo Jari
dikonversi menjadi sinyal digital oleh port ADC pada mikrokontroler. Kemudian nilai ADC diolah dalam program sehingga menghasilkan nilai pulseout untuk menggerakkan motor servo. Kelima motor servo ini dipasang
pada bagian ruang telapak tangan yang kosong. Tuas gigi luaran motor servo akan menarik atau mengulur tali khusus berupa tali senar raket yang dikaitkan pada ujung-ujung jari. Gerakan jari tangan robot akan sesuai dengan gerakan sarung tangan yang dipakai oleh pengendali. Urutan penomoran motor servo yaitu motor servo nomor 1 terdapat pada ibu jari, nomor motor servo 2 yaitu jari telunjuk, dan seterusnya berurutan sampai nomor motor servo nomor 5 pada jari kelingking robot.
b) Motor Servo Persendian1
Motor servo persendian1 berfungsi sebagai penggerak persendian atau pergelangan lengan. Bagian servo persendian1 yaitu motor servo dengan gerak horizontal. Motor servo persendian1 dapat berputar membentuk sudut maksimal 180⁰ pada arah horizontal. Motor servo persendian1 ini dikendalikan dengan potensiometer joystick dua arah yang dipasang pada kotak hitam sarung tangan. Pergerakan tuas potensiometer yang digunakan adalah tuas kanan dan kiri. Ketika potensiometer digerakan maka resistansi sensor akan berubah sehingga nilai tegangan yang dikirim dari sensor akan ikut berubah. Sinyal tegangan atau analog ini menjadi input pada mikrokontroler 1 yang kemudian dikonversi menjadi sinyal digital oleh port ADC pada mikrokontroler. Kemudian diolah dalam program sehingga menghasilkan nilai pulseout untuk menggerakkan motor servo persendian1. c) Motor Servo Persendian2
ikut berubah. Sinyal tegangan atau analog ini menjadi input pada mikrokontroler 1 yang kemudian dikonversi menjadi sinyal digital oleh port ADC pada mikrokontroler. Kemudian diolah dalam program sehingga menghasilkan nilai pulseout untuk menggerakkan motor servo persendian2. d) Motor DC Persendian3.
Motor DC berfungsi sebagai penggerak persendian utama lengan robot, yang terletak pada bagian dasar sebagai penopang lengan robot keseluruhan. Motor DC melakukan gerak vertikal sama hal nya dengan motor servo nomor 2. Motor DC dikendalikan dengan potensiometer joystick dua arah yang dipasang pada kotak hitam sarung tangan. Ketika potensiometer digerakkan maka resistansi sensor akan berubah sehingga nilai tegangan yang dikirim dari sensor akan ikut berubah. Sinyal tegangan atau analog ini menjadi input pada mikrokontroler 1 yang kemudian dikonversi menjadi sinyal digital
oleh port ADC pada mikrokontroler. Kemudian nilai ADC ini akan dibedakan pada 3 kondisi dengan ilustrasi algoritma teks sebagai berikut:
‘IF ADC > 540 Then ‘Motor DC Mundur ‘Else IF ADC < 490 Then ‘Motor DC Maju
‘Else
‘Motor DC Stop
Algoritma teks di atas yaitu untuk perintah menggerakkan Motor DC persendian3, dengan kata lain pergerakan persendian3 ini menggunakan kontrol on/off.
e) Rangka Alumunium
Rangka alumunium ini berungsi sebagai bahan utama kerangka lengan robot. Terdapat dua rangka alumunium, yaitu penghubung antara motor servo persendian1 dan motor servo persendian2, serta penghubung antara motor servo persendian dua dan motor DC. Kedua rangka alumunium ini berbentuk balok panjang berongga.
3.2.2 Sensor
a) Sensor Flex
Gambar 3.3. Skema Sensor Flex
Sensor flex dipasang pada sarung tangan pengendali, dengan setiap jari masing-masing menggunakan satu sensor. Dua kaki sensor dipasang rangkaian pembagi tegangan sebagai output dari sensor tersebut dan kemudian akan menjadi input mikrokontroler 1 pada pin A, dengan rincian :
Tabel 3.1. Sensor Flex
Nomor Sensor Letak Sensor Pin Mikrokontroler
Sensor 1 Ibu Jari PinA0
Sensor 2 Jari Telunjuk PinA1
Sensor 3 Jari Tengah PinA2
Sensor 4 Jari Manis PinA3
Sensor 5 Jari Kelingking PinA4
Tabel 3.2. Resistansi Output Sensor Flex
Resistansi
Telapak Membuka Telapak Mengepal Sensor Ibu Jari 14,39 KΩ 20,63 KΩ Sensor Jari Telunjuk 14,18 KΩ 24,15 KΩ Sensor Jari Tengah 15,89 KΩ 27,43 KΩ Sensor Jari Manis 12,91 KΩ 22,85 KΩ Sensor Jari Kelingking 12,36 KΩ 20,07 KΩ
Setelah diberikan tegangan pada sensor flex melalui rangkaian pembagi tegangan, maka didapatkan data Vout sebagai berikut:
Tabel 3.3. Vout Sensor Flex
Vout Selisih
Vout Telapak Membuka Telapak Mengepal
Sensor Ibu Jari 2,699 V 2,281 V 0,418 V mikrokontroler. Data hasil konversi adalah sebagai berikut :
Tabel 3.4. Nilai ADC Hasil Konversi (Telapak Membuka)
Telapak Membuka Nilai ADC
Sensor Ibu Jari 2,699 V 632-636
Sensor Jari Telunjuk 2,688 V 622-625 Sensor Jari Tengah 2,575 V 619-622
Sensor Jari Manis 2,771 V 640-643
Tabel 3.5. Nilai ADC Hasil Konversi (Telapak Mengepal)
Telapak Mengepal Nilai ADC
Sensor Ibu Jari 2,281 V 498-502
Sensor Jari Telunjuk 2,105 V 445-449 Sensor Jari Tengah 1,943 V 419-422
Sensor Jari Manis 2,126 V 452-456
Sensor Jari Kelingking 2,337 V 543-547
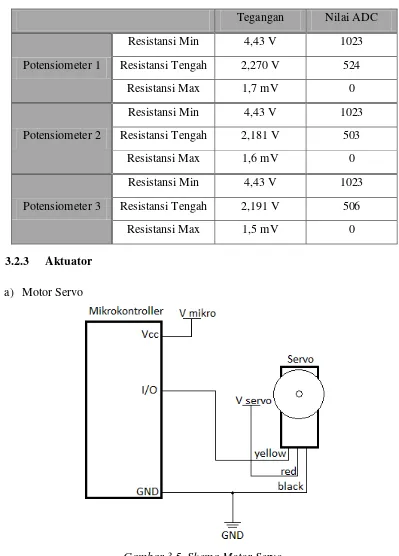
b) Potensiometer Fleksibel (Joystick)
Gambar 3.4. Skema Potensiometer
Kontrol gerak pada persendian robot tangan ini menggunakan joystick potensiometer. Potensiometer mengendalikan gerak motor servo persendian 1, motor servo persendian 2, dan motor DC persendian3. Potensiometer ini memiliki 3 pin kaki, yaitu pin1 tegangan positif, pin2 tegangan output dan pin3 tegangan negatif. Pin1 dan pin3 masing-masing mendapatkan sumber tegangan positif dan ground dari tagangan sumber yang diambil dari mikrokontroler, sedangkan pin2 (output potensiometer) menjadi input mikrokontroler1 sebagai kontrol masing-masing persendian. Satu persendian dikendalikan oleh satu potensiometer.
Output potensiometer berupa tegangan yang diatur oleh resistansi, apabila
desimal dalam program bascom AVR. Selanjutnya nilai desimal ini dimasukkan kedalam perhitungan matematis untuk menghasilkan pulseout yang akan menggerakkan motor servo dan motor DC. Pada tabel berikut ini diketahui output resistansi setiap potensiometer yang digunakan, yaitu :
Tabel 3.6. Resistansi Output Potensiometer
Resistansi
Potensiometer1 Potensiometer2 Potensiometer3
Resistansi Min 57,1 Ω 108,1 Ω 147,8 Ω
Resistansi Tengah 4,56 KΩ 5,34 KΩ 4,91 KΩ
Resistansi Max 8,56 KΩ 8,92 KΩ 8,94 KΩ
Setelah diberikan tegangan pada tiap potensiometer, maka didapatkan data Vout sebagai berikut:
Tabel 3.7. Vout Potensiometer
Tegangan
Potensiometer1 Potensiometer2 Potensiometer3
Resistansi Min 4,43 V 4,43 V 4,43 V
Resistansi Tengah 2,270 V 2,181 V 2,191 V
Resistansi Max 1,7 mV 1,6 mV 1,5 mV
Tabel 3.8. Nilai ADC Hasil Konversi Potensiometer
Tegangan Nilai ADC
Potensiometer 1
Resistansi Min 4,43 V 1023
Resistansi Tengah 2,270 V 524
Resistansi Max 1,7 mV 0
Potensiometer 2
Resistansi Min 4,43 V 1023
Resistansi Tengah 2,181 V 503
Resistansi Max 1,6 mV 0
Potensiometer 3
Resistansi Min 4,43 V 1023
Resistansi Tengah 2,191 V 506
Resistansi Max 1,5 mV 0
3.2.3 Aktuator
a) Motor Servo
Gambar 3.5. Skema Motor Servo
Tabel 3.9. Motor Servo
No Tipe Motor Servo Fungsi pada alat Besaran Torsi 1. HS-85MG+ Penggerak ibu jari 3 – 3,5 kg/cm
Tabel 3.10. Nilai Pulse Out Motor Servo Persendian1
No. Nilai yang dikirim Target Sudut
Tabel 3.11. Nilai Pulse Out Motor Servo Persensian2
No. Nilai yang dikirim Target Sudut
1 1750 150
2 2000 300
3 2250 450
4 2500 600
5 2750 750
6 3000 900
7 3250 1050
8 3500 1200
9 3750 1350
10 4000 1500
11 4250 1650
12 4500 1800
b) Motor DC
Gambar 3.6. Skema Motor DC
sejajar sumbu vekrtikal. Rentang gerak yang dihasilkan yaitu sebesar 1800. Pada posisi akhir gerak motor DC dipasang selektor untuk menghentikan putaran motor DC. Tabel 3 kondisi motor DC adalah sebagai berikut:
Tabel 3.12. Kondisi Gerak Persendian3
No. Nilai ADC Gerak Motor DC
1 0-489 CCW
2 490-540 Stop
3 541-1023 CW
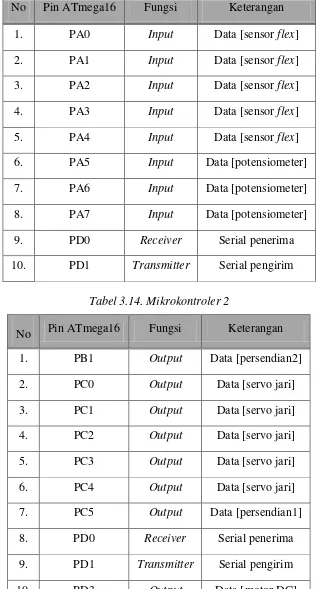
3.2.4 Mikrokontroler
Mikrokontroler yang digunakan adalah mikrokontroler jenis AVR yaitu ATMega16. Mikrokontroler ini mempunyai 32 port yang bisa dijadikan input atau output. Pemilihan mikrokontroler ini dikarenakan memiliki 8 pin kanal ADC,
yang dibutuhkan untuk mengkonversi tegangan input sensor flex dan potensiometer.
Tabel 3.13. Mikrokontroler 1
No Pin ATmega16 Fungsi Keterangan 1. PA0 Input Data [sensor flex]
10. PD1 Transmitter Serial pengirim
Tabel 3.14. Mikrokontroler 2
No Pin ATmega16 Fungsi Keterangan 1. PB1 Output Data [persendian2] 9. PD1 Transmitter Serial pengirim
10. PD3 Output Data [motor DC]
Gambar 3.7. Skematik Sistem Minumum Mikrokontroler
3.2.5 Media Wireless
Gambar 3.8. Skema Modul Wireless
3.3 Perancangan Program
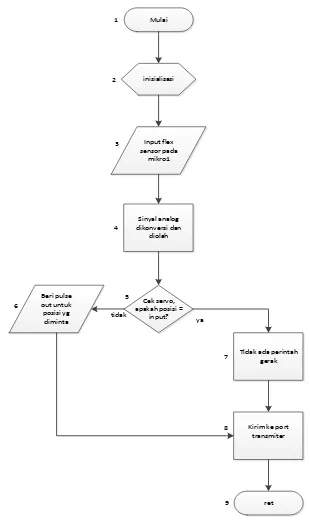
3.3.1 Algoritma Pemrograman Mikrokontroler 1
Mulai
Tabel 3.15. Keterangan diagram alir program pada mikrokontroler1
No Simbol Keterangan
1 Mulai
Memulai program
2 inisialisasi Inisialisasi dan deklarasi untuk program config
servo dan config adc
3
Input flex sensor pada
mikro1
Mikrokontroler 1 akan membaca input sinyal analog dari sensor flex dan potensiometer
4
Sinyal analog dikonversi dan
diolah
Sinyal analog dikonversi menjadi nilai satuan desimal kemudian diolah dengan perhitungan matematis sehingga dapat memberikan pulseout kepada motor servo jari, persendian serta
menggerakkan motor DC
5
Cek servo, apakah posisi =
input?
Apakah posisi motor servo sesuai dengan input dari sensor flex dan potensiometer, jika ya maka motor servo tidak bergerak, jika tidak maka motor servo akan bergerak sesuai dengan input dari sensor flex dan potensiometer
6
Beri pulse out untuk posisi yg
diminta
Memberikan pulseout untuk motor servo sesuai dengan input dari sensor flex dan potensiometer
7 Tidak ada perintah gerak
Motor servo tidak akan bergerak karena sudah sesuai dengan input dari sensor flex dan potensiometer
8
Kirim ke port
transmiter Mengirimkan data pulseout pada mikrokontroler
1 ke mikrokontroler 2 melalui media wireless
9 ret
3.3.2 Algoritma Pemrograman Mikrokontroler 2
Mulai
Membaca data string dari port receiver inisialisasi 1
2
3
Membagi masing-masing nilai variabel
dengan split
Mengubah tipe data string menjadi tipe
data word
Mengirim pulse out pada port output
ret 4
5
6
7
Tabel 3.16. Keterangan diagram alir program pada mikrokontroler2
No Simbol Keterangan
1 Mulai
Memulai program
2 inisialisasi Inisialisasi dan deklarasi untuk program config
servo dan config output port
3
Membaca data string
dari port receiver
Mikrokontroler 2 membaca data string (karena mikrokontroler 1 mengirim data dengan cara print, sehingga dimikrokontroler 2 yang terbaca adalah string) yang dikirim mikrokontroler 1 berupa pulseout untuk menggerakkan motor servo dan motor DC masing-masing variabel untuk menggerakkan motor servo dan motor DC sesuai dengan input kendali dari sensor flex dan potensiometer
5
Mengubah tipe data string menjadi tipe
data word
Tipe data diubah kedalam word untuk menjadi output berupa nilai pulseout sebagai penggerak
motor servo dan motor DC
6 Mengirim pulse out pada port output Nilai pulseout kirim melalui portC untuk setiap
motor servo
7 ret
42
Pada bab ini akan dibahas mengenai pengujian alat dan pembahasannya. Adapun pengujian yang dilakukan untuk menguji alat ini adalah sebagai berikut:
4.1 Pengujian Jari
Pengujian ini akan menguji apakah gerak replika jari persis meniru gerak sarung tangan yang dipasangi sensor gerak (sensor flex).
4.1.1 Ibu Jari
Data hasil kalibrasi pada tabel 3.4 Nilai ADC untuk Jari Membuka:
Nilai ADC untuk Jari Mengepal:
Gambar di atas menunjukkan ibu jari yang ditekuk pada sarung tangan akan diikuti oleh ibu jari pada replika. Nilai ADC maksimal dari sensor flex yang dibaca mikrokontroler yaitu antara 181 – 184, sedangkan untuk nilai ADC minimumnya yaitu antara 45 – 50. Data hasil pengujian adalah sebagai berikut:
Gambar 4.2. Nilai ADC Sensor Flex Ibu Jari
4.1.1 Jari Telunjuk
Data hasil kalibrasi pada tabel 3.4 Nilai ADC untuk Jari Membuka:
Nilai ADC untuk Jari Mengepal:
Gambar 4.3. Percobaan Tekuk Jari Telunjuk
Gambar di atas menunjukkan jari Telunjuk yang ditekuk pada sarung tangan akan diikuti oleh jari pada replika. Nilai ADC maksimal dari sensor flex yang dibaca mikrokontroler yaitu antara 150 – 152. Untuk nilai ADC minimumnya yaitu antara 44 – 47. Data hasil pengujian adalah sebagai berikut:
Gambar 4.4. Nilai ADC Sensor Flex Jari Telunjuk
4.1.2 Jari Tengah
Data hasil kalibrasi pada tabel 3.4 Nilai ADC untuk Jari Membuka:
Nilai ADC untuk Jari Mengepal:
Gambar 4.5. Percobaan Tekuk Jari Tengah
Gambar di atas menunjukkan jari Tengah yang ditekuk pada sarung tangan akan diikuti oleh jari pada replika. Nilai ADC maksimal dari sensor flex yang dibaca mikrokontroler yaitu antara 160 – 161, sedangkan untuk nilai ADC minimumnya yaitu antara 48 – 51. Data hasil pengujian adalah sebagai berikut:
4.1.3 Jari Manis
Data hasil kalibrasi pada tabel 3.4 Nilai ADC untuk Jari Membuka:
Nilai ADC untuk Jari Mengepal:
Gambar 4.7. Percobaan Tekuk Jari Manis
Gambar 4.8. Nilai ADC Sensor Flex Jari Manis
4.1.4 Jari Kelingking
Data hasil kalibrasi pada tabel 3.4 Nilai ADC untuk Jari Membuka:
Nilai ADC untuk Jari Mengepal:
Gambar di atas menunjukkan jari kelingking yang ditekuk pada sarung tangan akan diikuti oleh jari pada replika. Nilai ADC maksimal dari sensor flex yang dibaca mikrokontroler yaitu antara 146 – 147, sedangkan untuk nilai ADC minimumnya yaitu antara 47 – 49. Data hasil pengujian adalah sebagai berikut:
Gambar 4.10. Nilai ADC Sensor Flex Jari Kelingking
Tabel 4.1. Selisih Nilai ADC Pengujian dengan Kalibrasi
Hasil Pengujian
Hasil
Kalibrasi Selisih
Telapak Membuka
Sensor Ibu Jari 183 154 29
Sensor Jari Telunjuk 152 146 6
Sensor Jari Tengah 161 160 1
Sensor Jari Manis 149 153 4
Sensor Jari Kelingking 147 161 14
Telapak Mengepal
Sensor Ibu Jari 47 44 3
Sensor Jari Telunjuk 44 44 0
Sensor Jari Tengah 48 44 4
Sensor Jari Manis 44 44 0
4.1.5 Jari Mengepal
Gambar 4.11. Percobaan Mengepal
Gambar di atas menunjukkan seluruh jari yang mengepal pada sarung tangan akan diikuti oleh seluruh jari pada replika. Namun tingkat kepalan pada replika hanya terbatas dan tidak mengepal penuh seperti kepalan sarung tangan. Ketika semua jari sarung tangan mengepal maka semua sensor flex memberikan output sinyal rendah, keterangan dapat lihat pada gambar di bawah ini:
Gambar 4.12. Nilai ADC Sensor Flex Semua Jari
tangan sendiri yang tidak memungkinkan untuk menggenggam benda karena alat tersebut membeli yang sudah jadi.
4.2 Pengujian Persendian1 Motor Servo
Pengujian persendian1 yaitu pengujian alat pada bagian titik poros dengan penggerak motor servo torsi ±3.5 kg/cm dengan pergerakan sudut searah sumbu X. Maksimal sudut yang dibentuk adalah 1800 sedangkan minimal sudut yang dibentuk adalah 00. Berikut ini adalah tabel hasil pengujian persendian1:
Tabel 4.2. Hasil Percobaan Sudut Persendian1
No. Nilai yang
Gambar 4.13. Grafik Hasil Percobaan Sudut Persendian1
Gambar 4.14. Contoh Pengambilan Data Persendian1
Dari data hasil percobaan di atas titik poros persendian1 sebagian besar telah bergerak sesuai dengan pergerakan sudut yang ditargetkan. Namun terlihat bahwa terdapat beberapa nilai yang kurang presisi rentang nilai yang dikirimkan oleh potensiometer. Hal ini dikarenakan data sinyal yang dikirim potensiometer cenderung sulit untuk ditentukan karena rentan tuas potensiometer yang terbatas harus merepresentasikan sudut 00 sampai 1800, sehingga terdapat kesulitan dalam menentukan tingkat kepresisian sudut yang sangat tepat. Perhitungan tingkat deviasi adalah sebagai berikut:
4.3 Pengujian persendian2 Motor Servo
Tabel 4.3. Hasil Percobaan Sudut Persendian2
Tabel Hasil pengujian Persendian2 di atas menunjukkan bahwa pergerakan persensian2 disetiap sudut terdapat selisih dengan target sudut yang seharusnya yaitu pada tabel 3.11, dimana persentase deviasi tiap-tiap sudut bervariasi. Berikut adalah grafik Hasil Pengujian Persendian2:
Gambar 4.15. Grafik Hasil Percobaan Sudut Persendian2
15
1750 2000 2250 2500 2750 3000 3250 3500 3750 4000 4500
Gambar 4.16. Contoh Pengambilan Data Persendian2
Dari hasil percobaan di atas, titik poros persendian2 sebagian besar telah bergerak sesuai dengan target pergerakan sudut yang diharapkan. Namun terlihat bahwa data yang dikirim dari potensiometer cenderung bergerak tidak konstan, terdapat rentang nilai yang dikirimkan potensiometer untuk mencapai setiap sudut yang diinginkan. tingkat deviasi pada setiap sudut pun berbeda, namun ada juga beberapa sudut yang akurat sesuai dengan target pencapaiannya. Hal ini dikarenakan rentang antara maksimal dan minimal tuas potensiometer yang kecil sehingga untuk merepresentasikan rentang data nilai ADC sangat sulit untuk mencapai tingkat presisi yang tinggi. Perhitungan deviasi adalah sebagai berikut:
4.4 Pengujian Persendian3 Motor DC
Pengujian bagian persendian3 yaitu titik poros dengan penggerak motor DC. Pengujian pergerakan persendian ini tidak berdasarkan pada sudut, ini dikarenakan pergerakannya dilakukan secara kontrol on/off. Terdapat tiga kondisi pergerakan motor DC ini, yaitu bergerak maju (CW), mundur (CCW) dan berhenti (stop). Dibawah ini adalah gambar keterangan arah kendali persendian:
Gambar 4.17. Keterangan Arah Kendali Persendian
Tabel 4.4. Hasil Percobaan Gerak Persendian3 No. Nilai ADC Gerak Motor DC
1 0 CCW
2 484 CCW
3 489 CCW
4 490 Stop
5 503 Stop
6 566 CW
Gambar 4.18. Contoh Pengambilan Data Persendian3(CW)
Gambar 4.19. Contoh Pengambilan Data Persendian3 (CCW)
57 5.1 Kesimpulan
Dari hasil perancangan alat, pembuatan alat dan pengujian alat yang sudah dilakukan dapat menarik beberapa kesimpulan yang menggambarkan keseluruhan alat ini, yaitu:
1. Secara keseluruhan alat yang dirancang dapat bergerak meniru gerak dari tangan pengendali.
2. Gerak jari dapat mengikuti pergerakkan sensor flex pada sarung tangan pengendali, namun terdapat selisih nilai ADC seperti terlihat pada tabel 4.1 yang mengakibatkan gerak jari alat tidak presisi persis dengan gerak sarung tangan.
3. Persendian1, persendian2 dan persensian3 mampu bergerak mengikuti gerak potensiometer dari pengontrol, namun terdapat selisih sudut dari target pencapaian sudut tiap-tiap persendian, masing-masing terlihat pada tabel 4.3, tabel 4.5 dan tabel 4.6 dengan persentase sudut deviasi tiap-tiap sudut bervariasi.
4. Rangka replika tangan tidak dapat mengepal dengan sempurna seperti kepalan sarung tangan pengontrol, sehingga replika tangan tidak bisa menggenggam benda.
5.2 Saran
Adapun saran dari penulis untuk pengembangan alat ini agar dapat disempurnakan selanjutnya adalah sebagai berikut:
2. Setiap jari pada rangka replika tangan hendak dipasang sensor tictile supaya jari replika dapat mengetahui dan merasakan permukaan benda, ketika replika jari sudah dapat menggenggam benda.
![Gambar 2.17. Contoh Source Code BASCOM AVR [10]](https://thumb-ap.123doks.com/thumbv2/123dok/652396.79589/31.595.150.475.85.266/gambar-contoh-source-code-bascom-avr.webp)