Resolusi pengukuran merupakan ukuran terkecil dari perubahan TMA yang dapat terukur. Dengan menggunakan sensor hall, perubahan TMA akan diketahui apabila ada efek yang ditimbulkan oleh kontak antara magnet dan sensor. Kontak antara magnet dan sensor tersebut akan terjadi apabila ada putaran pada pulley. Karena hal tersebut maka resolusi pengukuran akan ditentukan oleh ukuran poros lingkaran yang dililiti tali pada pulley.
3.3.3.3 Visualisasi Output Rangkaian ..Penerjemah Arah Gerakan Cara kerja rangkaian penerjemah arah gerakan akan lebih mudah dipahami melalui grafik. Pada tahap ini dilakukan simulasi untuk mendapatkan data perubahan arah gerakan. Berdasarkan data yang ada dibuat grafik perubahan tinggi muka air agar cara kerja rangkaian penerjemah arah gerakan lebih tergambarkan.
IV. HASIL DAN PEMBAHASAN 4.1 Rancangan Fisik Alat Untuk
..Pengujian Rangkaian Penerjemah ..Arah Gerakan
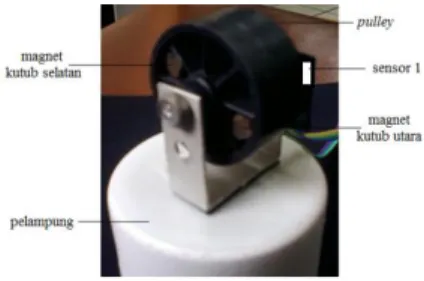
Alat yang digunakan untuk menguji rangkaian penerjemah arah gerakan berupa Alat ukur tinggi muka air tipe pelampung sederhana. Alat tersebut memiliki komponen fisik yang hampir sama dengan alat lain yang sejenis. Bagian dasar dari fisik alat adalah pelampung, pulley, dan stilling well. Pelampung dan pulley merupakan bagian alat yang memiliki peranan penting dalam memberikan input pada sensor. Perbedaan utama dengan alat ukur TMA tipe pelampung lainnya adalah adanya penggabungan antara pelampung dengan pemberat, dengan kata lain fungsi pemberat dan pelampung ada pada satu bagian alat yang sama.
4.1.1 Pelampung
Pelampung berfungsi sebagai pendeteksi perubahan TMA. Perubahan TMA akan menyebabkan posisi pelampung berubah-ubah mengikuti perubahan TMA tersebut. Pada alat yang telah dirancang pelampung juga berperan sebagai bandul pemberat. Ada beberapa hal yang harus diperhatikan dalam pembuatan pelampung, diantaranya adalah berat jenis dan ukurannya. Pelampung haruslah memiliki gaya berat yang lebih kecil dibandingkan
gaya dorong keatas oleh air. Syarat untuk terwujudnya hal tersebut diantaranya adalah pelampung memiliki berat jenis yang lebih kecil dibandingkan dengan air. Hal penting lainnya yang harus diperhatikan adalah pelampung harus cukup berat agar bisa berfungsi sebagai bandul pemberat.
Gambar 21 Pelampung dengan beberapa pilihan ukuran
Bentuk pelampung sangatlah berpengaruh dalam pengukuran TMA. Sebagai pendeteksi perubahan TMA, ukuran pelampung yang sebaiknya digunakan adalah pelampung a. Pelampung a memiliki luas alas yang lebih luas dan tidak terlalu tinggi jika dibandingkan dengan pelampung b dan c. Dengan luas alas yang lebih luas pelampung a akan mendapatkan gaya dorong yang lebih besar dari air ketika terjadi perubahan TMA. Dibandingkan dengan pelampung lainnya pelampung a yang lebih pendek dapat mendeteksi perubahan TMA yang lebih rendah ketika terjadi kondisi minimum yang sama. Pada penelitian ini pelampung yang digunakan berbentuk tabung dengan ukuran tinggi 3,3 cm, diameter 6,4 cm, dan massa 50 g.
4.1.2 Pulley
Pulley akan berputar ketika ada perubahan TMA. Pada alat yang telah dibuat digunakan pulley dengan ukuran diameter lingkaran luar 3.5cm dan diameter lingkaran dalam 1cm. Pada pulley tersebut dipasang dua magnet dengan arah kutub yang berbeda. Perputaran pulley akan menyebabkan perubahan medan magnet, sehingga memberikan efek yang berbeda terhadap hall effect sensor yang digunakan sebagai sensor gerakan.
Gambar 22 Pulley yang terpasang pada pelampung
dapat mengurangi pergolakan air diluar sumur sehingga air yang berada dalam sumur tersebut dalam kondisi yang relatif tenang. Agar kondisi pelampung didalam sumur penenang tersebut juga relatif stabil, ukuran sumur penenang dibuat dengan ukuran yang sedikit lebih besar daripada ukuran luas alas pelampung. Pada penelitian ini stilling well yang dibuat dari pipa PVC memiliki diameter 7.6cm dan tinggi 100 cm
4.2 Pengujian Rangkaian Elektronik .Penerjemah Arah Gerakan
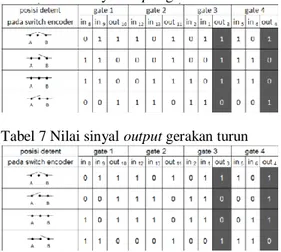
4.2.1 Pengujian dengan Switch .Encoder Secara mekanik switch encoder bekerja seperti saklar, dimana terdapat dua saklar dengan empat variasi kondisi hidup (on) ataupun mati (off) yang berbeda. Empat kondisi saklar tersebut ditentukan oleh perubahan posisi pada detent. Pada kondisi pertama saklar A maupun B tidak dalam posisi terhubung, sehingga tidak ada sinyal yang dihasilkan. Pada kondisi berikutnya hanya saklar A yang terhubung, maka sinyal A akan dihasilkan (on) dan menuju rangkaian penerjemah arah gerakan. Setelah itu saklar B juga akan terhubung seperti saklar A, sehingga dihasilkan dua sinyal. Kemudian penghubung pada saklar A akan lepas dan hanya saklar B yang terhubung sehingga hanya sinyal B yang dihasilkan.
Dengan mengalirkan sinyal yang dihasilkan oleh switch encoder melewati rangkaian penerjemah arah gerakan, dapat diketahui kombinasi nilai input yang dibu -
output yang berkebalikan dengan gerakan turun.
Tabel 6 Nilai sinyal output gerakan naik
Tabel 7 Nilai sinyal output gerakan turun
Dengan menggunakan input dari switch encoder, rangkaian penerjemah arah gerakan dapat membedakan gerakan naik ataupun turun berdasarkan pola nilai output yang dihasilkan pada pin 3 dan pin 4. Meskipun dapat menggambarkan pola nilai output untuk gerakan naik dan turun, namun secara mekanis switch encoder tidak dapat dimanfaatkan secara langsung sebagai sensor perubahan TMA, karena nilai output berupa sinyal positif yang diharapkan untuk dapat diterjemahkan menjadi gerakan naik seharusnya hanya dihasilkan oleh pin 3, begitu juga sebaliknya dengan sinyal dari gerakan turun yang diharapkan hanya keluar dari pin 4.
4.2.2 Pengujian dengan Hall Sensor 4.2.2.1 Cara Kerja Sensor
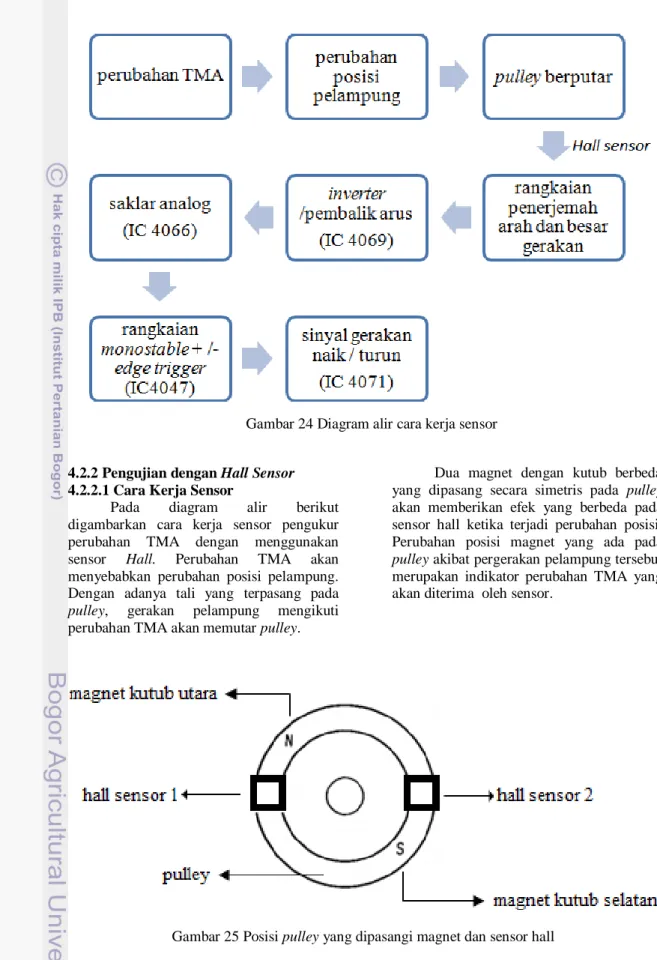
Pada diagram alir berikut digambarkan cara kerja sensor pengukur perubahan TMA dengan menggunakan sensor Hall. Perubahan TMA akan menyebabkan perubahan posisi pelampung. Dengan adanya tali yang terpasang pada pulley, gerakan pelampung mengikuti perubahan TMA akan memutar pulley.
Dua magnet dengan kutub berbeda yang dipasang secara simetris pada pulley akan memberikan efek yang berbeda pada sensor hall ketika terjadi perubahan posisi. Perubahan posisi magnet yang ada pada pulley akibat pergerakan pelampung tersebut merupakan indikator perubahan TMA yang akan diterima oleh sensor.
Gambar 24 Diagram alir cara kerja sensor
magnet dengan kutub utara dan kemudian akan netral kembali setelah didekati oleh magnet kutub selatan. Untuk gerakan dengan arah berkebalikan, sensor yang kedua akan memberikan efek ketika didekati oleh magnet dengan kutub selatan dan akan netral kembali ketika ada magnet dengan kutub utara.
Gambar 26 Perubahan posisi magnet dan
..nilai output karena putaran
..pada pulley
4.2.2.2 Output Rangkaian Elektronik
.Penerjemah Arah Gerakan
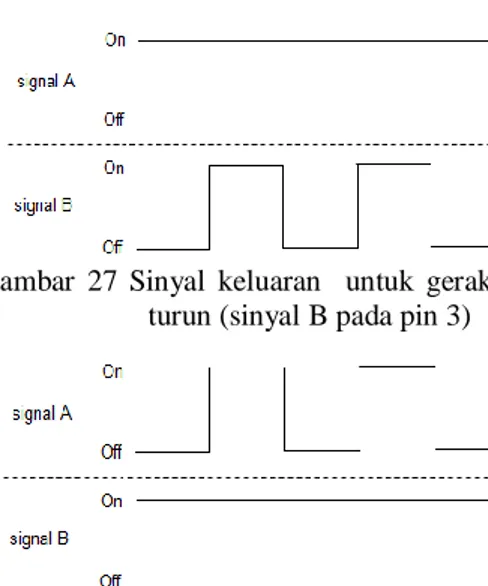
.dengan Input .dari Hall .Sensor Perbedaan arah gerakan pada pulley akan memberikan perbedaan nilai input pada rangkaian penerjemah arah gerakan. Perbedaan nilai input tersebut akan diterjemahkan oleh rangkaian penerjemah arah gerakan menjadi output berupa sinyal dengan bentuk yang berbeda antara gerakan searah jarum jam (clock wise: CW) dengan berlawanan arah jarum jam (counter clock wise: CCW). Nilai output dari rangkaian penerjemah arah gerakan untuk arah yang berlawanan tersebut tergambarkan pada tabel 8. Dengan asumsi bahwa gerakan searah jarum jam sama dengan kejadian penurunan tinggi muka air, maka sinyal output yang dihasilkan oleh rangkaian ada pada pin 3 (pada gate 3), sedangkan sinyal output untuk kejadian peningkatan tinggi muka air ada pada pin 4.
Tabel 8 Arah putaran pada pulley dan nilai output
Dengan menggunakan rangkaian elektronik untuk penerjemah arah gerakan,
sedangkan penurunan TMA akan menghasilkan sinyal pada pin 3.
Gambar 27 Sinyal keluaran untuk gerakan turun (sinyal B pada pin 3)
Gambar 28 Sinyal keluaran untuk gerakan naik (sinyal A pada pin 4)
4.3 Pemanfaatan Rangkaian Penerjemah .Arah Gerakan Untuk Pengukuran .Perubahan Tinggi Muka Air
Output dari rangkaian penerjemah arah juga dapat dimanfaatkan untuk mengetahui besar perubahan tinggi muka air. Arah gerakan diketahui berdasarkan bentuk pulsa yang dihasilkan, sedangkan besar perubahan TMA diketahui berdasarkan jumlah output pulsa untuk setiap kejadian. Besar perubahan tersebut baru dapat diketahui setelah dilakukan pengolahan lanjut terhadap sinyal output dari rangkaian penerjemah arah gerakan.
4.3.1 Pengolahan Sinyal Output dari
.Rangkaian Penerjemah Arah
.Gerakan
Untuk tujuan mengetahui besar perubahan pada rangkaian penerjemah arah gerakan, menigkatkan jumlah data yang dapat terukur (storage data) dan menghemat pemakaian catu daya, sinyal output dari rangkaian penerjemah arah gerakan bisa diolah terlebih dahulu. Hal-hal tersebut dapat dilakukan dengan cara membalikan nilai output menggunakan rangkaian inverter dan mengurangi lebar pulsa menggunakan rangkaian monostable positive-negative edge trigger dengan keluaran terakhir pada gerbang OR.
4.3.1.1 Aplikasi Rangkaian Inverter dan ..Analog Switch
IC 4069 yang berisikan sirkuit inverter dapat mengubah nilai output menjadi nilai yang berkebalikan dengan nilai inputnya. Dengan menggunakan input dari rangkaian penerjemah arah gerakan (IC 4093), untuk gerakan naik, output pada pin 3 yang selalu dalam kondisi on akan diubah menjadi kondisi off. Perubahan nilai output yang selalu dalam kondisi on menjadi kondisi off tersebut dapat menghemat pemakaian catu daya. Catu daya tersebut bisa dimanfaatkan untuk pengukuran disaat terjadinya perubahan TMA.
4.3.1.2 Aplikasi Rangkaian Monostable
..Positive dan Negative Edge
..Trigger .dan Gerbang OR
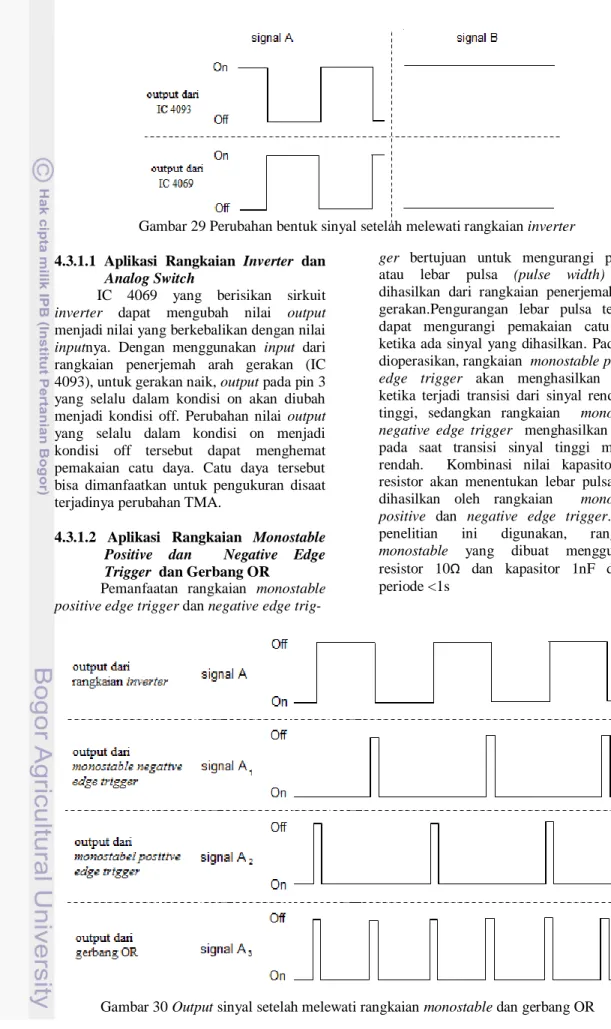
Pemanfaatan rangkaian monostable positive edge trigger dan negative edge trig-
ger bertujuan untuk mengurangi periode atau lebar pulsa (pulse width) yang dihasilkan dari rangkaian penerjemah arah gerakan.Pengurangan lebar pulsa tersebut dapat mengurangi pemakaian catu daya ketika ada sinyal yang dihasilkan. Pada saat dioperasikan, rangkaian monostable positive edge trigger akan menghasilkan sinyal ketika terjadi transisi dari sinyal rendah ke tinggi, sedangkan rangkaian monostable negative edge trigger menghasilkan sinyal pada saat transisi sinyal tinggi menjadi rendah. Kombinasi nilai kapasitor dan resistor akan menentukan lebar pulsa yang dihasilkan oleh rangkaian monostable positive dan negative edge trigger. Pada penelitian ini digunakan, rangkaian monostable yang dibuat menggunakan resistor 10Ω dan kapasitor 1nF dengan periode <1s
Gambar 29 Perubahan bentuk sinyal setelah melewati rangkaian inverter
pulsa yang menggambarkan suatu kejadian (1 sinyal untuk 1 putaran penuh pada pulley) dapat diterjemahkan menjadi dua informasi, yaitu menjadi sinyal awal dan akhir kejadian. Setelah melewati gerbang OR, untuk setengah putaran pada pulley akan dihasilakan dua sinyal. Untuk gerakan satu arah, sinyal akhir dari suatu kejadian merupakan sinyal awal untuk kejadian berikutnya.
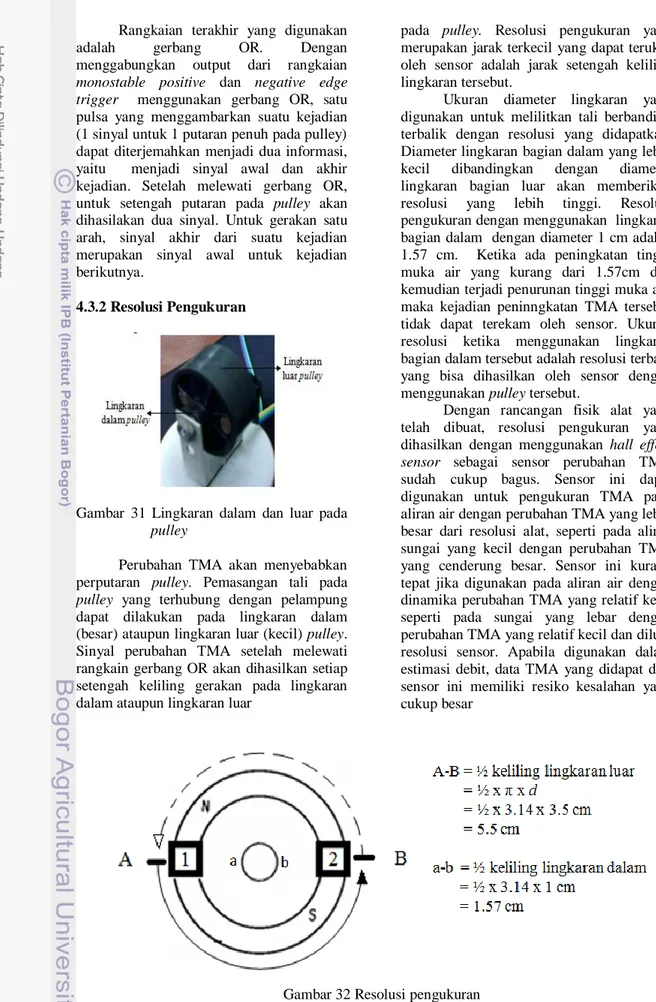
4.3.2 Resolusi Pengukuran
Gambar 31 Lingkaran dalam dan luar pada pulley
Perubahan TMA akan menyebabkan perputaran pulley. Pemasangan tali pada pulley yang terhubung dengan pelampung dapat dilakukan pada lingkaran dalam (besar) ataupun lingkaran luar (kecil) pulley. Sinyal perubahan TMA setelah melewati rangkain gerbang OR akan dihasilkan setiap setengah keliling gerakan pada lingkaran dalam ataupun lingkaran luar
digunakan untuk melilitkan tali berbanding terbalik dengan resolusi yang didapatkan. Diameter lingkaran bagian dalam yang lebih kecil dibandingkan dengan diameter lingkaran bagian luar akan memberikan resolusi yang lebih tinggi. Resolusi pengukuran dengan menggunakan lingkaran bagian dalam dengan diameter 1 cm adalah 1.57 cm. Ketika ada peningkatan tinggi muka air yang kurang dari 1.57cm dan kemudian terjadi penurunan tinggi muka air, maka kejadian peninngkatan TMA tersebut tidak dapat terekam oleh sensor. Ukuran resolusi ketika menggunakan lingkaran bagian dalam tersebut adalah resolusi terbaik yang bisa dihasilkan oleh sensor dengan menggunakan pulley tersebut.
Dengan rancangan fisik alat yang telah dibuat, resolusi pengukuran yang dihasilkan dengan menggunakan hall effect sensor sebagai sensor perubahan TMA sudah cukup bagus. Sensor ini dapat digunakan untuk pengukuran TMA pada aliran air dengan perubahan TMA yang lebih besar dari resolusi alat, seperti pada aliran sungai yang kecil dengan perubahan TMA yang cenderung besar. Sensor ini kurang tepat jika digunakan pada aliran air dengan dinamika perubahan TMA yang relatif kecil seperti pada sungai yang lebar dengan perubahan TMA yang relatif kecil dan diluar resolusi sensor. Apabila digunakan dalam estimasi debit, data TMA yang didapat dari sensor ini memiliki resiko kesalahan yang cukup besar
4.3.3 Visualisasi Output Rangkaian ..Penerjemah Arah Gerakan Data perubahan tinggi muka air ini dapat menggambarkan cara kerja rangkaian penerjemah arah gerakan dan sensor gerakan yang digunakan. Setiap ada perubahan tinggi muka air, maka tinggi muka air akan berkurang (decrement) ataupun bertambah (increment) sebesar resolusi terkecil yang mampu diukur oleh sensor, yaitu ±0.055m (lilitan tali pada lingkaran luar pulley, resolusi rendah).
Dilihat dari titik-titik pengukuran dengan selang yang tidak tetap diketahui bahwa sensor yang dibuat hanya akan melakukan pengukuran pada saat terjadi perubahan tinggi muka air saja, sehingga pemakaian catu daya ketika pengiriman sinyal output dari rangkaian akan lebih hemat tanpa mengurangi kemampuan sensor untuk mengamati perubahan tinggi muka air secara detail. Cara kerja alat yang hanya mengukur pada waktu tertentu saja memungkinkan alat untuk dapat dipakai dalam jangka waktu yang lama karena pemakaian catu daya yang lebih sedikit dibandingkan dengan alat yang mengukur secara terus menerus.
V. SIMPULAN DAN SARAN 5.1 SIMPULAN
Dengan menggunakan hall effect sensor sebagai sensor yang memberikan input bagi rangkaian penerjemah arah gerakan, rangkaian penerjemah arah gerakan yang dibentuk dari IC 4093 tersebut dapat
dimanfaatkan untuk membedakan arah gerakan.
Rangkaian penerjemah arah gerakan dengan input dari hall effect sensor dapat dimanfaatkan untuk pengukuran perubahan tinggi muka air. Untuk tujuan tersebut terlebih dahulu ditambahkan rangkaian rangkaian inverter serta rangkaian monostable positive-negative edge trigger dengan output terakhir pada gerbang OR. Rangkaian tersebut hanya akan mengukur pada saat ada perubahan tinggi muka air. Penambahan rangkaian tersebut akan menghemat pemakaian catu daya. Setelah melewati gerbang OR, untuk setengah putaran pada pulley akan dihasilkan dua sinyal perubahan arah gerakan (searah).
Pulley berdiameter 1cm akan memberikan resolusi pengukuran sebesar 1.57cm. Dengan ukuran resolusi tersebut, alat ukur TMA dengan menggunakan sensor ini tidaklah cocok digunakan untuk semua kondisi aliran air. Dengan menggunakan perangkat fisik alat yang telah dibuat, sensor ini dapat digunakan untuk pengukuran TMA pada aliran air dengan perubahan TMA yang lebih besar dari resolusi alat seperti pada aliran sungai yang kecil dengan perubahan TMA yang cenderung besar. Sensor ini kurang tepat jika digunakan pada aliran air dengan dinamika perubahan TMA yang kecil seperti pada sungai lebar.
5.2 SARAN
Resolusi pengukuran yang didapat dengan menggunakan Hall effect latch sensor masih tergolong rendah. Untuk meningkatkan resolusi pengukuran dapat Gambar 33 Visualisasi hasil olahan data dari output rangkaian penerjemah arah gerakan