i TUGAS AKHIR – TM 141585
ANALISA TEGANGAN DAN DEFLEKSI KABEL PADA SISTEM MONOCABLE ROPEWAY DAN SIMULASI NUMERIK MENGGUNAKAN SOFTWARE SAP2000
MARIA RIZQI YUDHA SEPTIANA NRP 02111440000046
Dosen Pembimbing Ir. Yusuf Kaelani, M.Eng
DEPARTEMEN TEKNIK MESIN Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember Surabaya 2018
[Halaman Sengaja Dikosongkan]
iii TUGAS AKHIR – TM 141585
ANALISA TEGANGAN DAN DEFLEKSI KABEL PADA SISTEM MONOCABLE ROPEWAY DAN SIMULASI NUMERIK MENGGUNAKAN SOFTWARE SAP2000
MARIA RIZQI YUDHA SEPTIANA NRP 02111440000046
Dosen Pembimbing Ir. Yusuf Kaelani, M.Eng
DEPARTEMEN TEKNIK MESIN Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember Surabaya 2018
[Halaman Sengaja Dikosongkan]
v FINAL PROJECT – TM 141585
ANALYSIS OF CABLE TENSION AND CABLE DEFLECTION IN MONOCABLE ROPEWAY SYSTEM AND NUMERICAL SIMULATION USING SAP2000 SOFTWARE
MARIA RIZQI YUDHA SEPTIANA NRP 02111440000046
Advisor
Ir. Yusuf Kaelani, M.Eng
DEPARTMENT OF MECHANICAL ENGINEERING Faculty of Industrial Technology
Institut Teknologi Sepuluh Nopember Surabaya 2018
[Halaman Sengaja Dikosongkan]
vii
[Halaman Sengaja Dikosongkan]
i
ANALISA TEGANGAN DAN DEFLEKSI KABEL PADA SISTEM MONOCABLE ROPEWAY DAN SIMULASI NUMERIK MENGGUNAKAN SOFTWARE SAP2000
Nama Mahasiswa : Maria Rizqi Yudha Septiana
NRP : 0211144000046
Jurusan : Teknik Mesin, FTI-ITS Dosen Pembimbing : Ir. Yusuf Kaelani, M.Eng
Abstrak
Pada industri kelapa sawit, peningkatan jumlah kelapa sawit yang diekspor tidak diiringi dengan meningkatnya harga kelapa sawit. Hal ini menjadi salah satu pertimbangan untuk memperbaiki sistem produksi, salah satunya proses pengangkutan kelapa sawit. Dalam pengangkutan kelapa sawit, penerapan sistem monocable ropeway dapat menghemat biaya bahan bakar dan tenaga kerja, serta lebih ramah lingkungan dibandingkan saat menggunakan truk dan wintor. Penggunaan sistem monocable ropeway untuk pengangkutan kelapa sawit merupakan hal baru di Indonesia, sehingga perlu dilakukan penelitian disetiap bagiannya.
Pada tugas akhir ini akan dilakukan analisa kekuatan dan kelendutan kabel pada sistem monocable ropeway. Pertama akan dilakukan perhitungan manual saat dalam kondisi mendatar.
Selanjutnya dalam kondisi yang sama, dilakukan simulasi numerik dengan menggunakan software SAP2000. Kemudian dilakukan verifikasi hasil dari perhitungan dan simulasi. Apabila memiliki hasil yang sama, maka akan dilakukan simulasi selanjutnya dengan kondisi menanjak dan menurun.
Tegangan kabel terbesar terjadi ketika diberi pembebanan oleh dua beban. Tegangan kabel pada kondisi menanjak dan menurun sama yaitu 158,66 N/mm2. Lebih kecil dari tegangan yang dibutuhkan pada kondisi mendatar yaitu 211,33 N/mm2. Besar tegangan maksimal pada kabel (211,33 N/mm2), lebih kecil dari yield strength kabel (1960 N/mm2), sehingga sistem tersebut aman.
Besar defleksi yang terjadi pada kabel, bergantung pada tegangan kabel. Semakin besar tegangan pada kabel, maka semakin kecil defleksi yang terjadi dan sebaliknya. Hasil perhitungan daya mesin yang dibutuhkan untuk menjalankan sistem monocable ropeway adalah 18,21 HP.
Kata kunci: Tegangan, defleksi, daya, monocable ropeway.
iii
ANALYSIS OF CABLE TENSION AND CABLE DEFLECTION IN MONOCABLE ROPEWAY SYSTEM
AND NUMERICAL SIMULATION USING SAP2000 SOFTWARE
Name : Maria Rizqi Yudha Septiana
NRP : 0211144000046
Department : Teknik Mesin, FTI-ITS Advisor : Ir. Yusuf Kaelani, M.Eng
Abstract
In the palm oil industry, the increasing amount of palm oil being exported is not accompanied by rising palm oil prices. This becomes one of the considerations to improve the production system, one of which is the process of transporting said commodity.
In the transportation process of palm oil, the application of the monocable ropeway system can save on fuel and labor costs and will be more environmentally friendly than when using trucks and the likes. The use of a monocable ropeway system for palm oil transport is new a new system that’s yet to be applied in Indonesia, so more research needs to be done in every part.
In this final project, the strength and deflection of the cable on the monocable ropeway system will be analyzed. The first will be done manual calculations when in horizontal condition.
Furthermore, under the same conditions, a numerical simulation will be processed using SAP2000 software. Then the result of calculation and simulation will be verified. If said processes have the same results, then the next simulation will be done under uphill and downhill condition.
The largest cable tension occurs when given the loading by two loads. Cable tension in the uphill and downhill conditions is 158.66 N/mm2. Smaller than the tension required by the horizontal condition which is 211.33 N/mm2. The maximum tension on the cable (211.33 N/mm2), is smaller than the yield strength of cable
(1960 N/mm2), so the system is safe. The amount of deflection occurring on the cable depends on the cable tension. The larger the tension on the cable, the smaller the deflection occurs and vice versa. The calculation of engine power required to run the monocable ropeway system is 18.21 HP.
Keywords: Tension, deflection, power, monocable ropeway.
v
KATA PENGANTAR Assalamu’alaikum Warahmatullahi Wabarakatuh
Alhamdulillahhirobil ‘Alamain, segala puja dan puji syukur keharidat Allah SWT atas rahmat dan ridho-Nya, sehingga peneliti dapat menyelesaikan skripsi yang berjudul “ANALISA TEGANGAN DAN DEFLEKSI KABEL PADA SISTEM MONOCABLE ROPEWAY DAN SIMULASI NUMERIK MENGGUNAKAN SOFTWARE SAP2000”. Tugas akhir ini adalah salah satu syarat kelulusan sebagai sarjana teknik di Jurusan Teknik Mesin FTI-ITS.
Dalam penyelesaian tugas akhir ini, penulis telah memperoleh dari berbagai pihak. Untuk itu, penulis ingin menyampaikan ucapan terima kasih kepada:
1. Orang tua tercinta, Ibu Mariani, alm Bapak Katidjan Redhi, dan alm Bapak Bambang Sutrisno yang selalu memberikan dukungan materil maupun doa restu yang tak henti-hentinya dan semua hal yang terbaik bagi penulis.
2. Bapak Ir. Yusuf Kaelani, M.Eng., selaku dosen pembimbing yang selalu membimbing dan memberikan arahan kepada penulis.
3. Bapak Ir. Julendra B. Ariatedja selaku dosen pembimbing kedua yang selalu memberi dukungan, semangat dan arahan dalam pengerjaan tugas akhir ini.
4. Bapak Dr.Agus Sigit Pramono, DEA dan Bapak Ari Kurniawan Saputra, S.T., M.T., selaku dosen penguji yang telah memberikan kritik dan saran kepada penulis dalam penyempurnaan tugas akhir ini.
5. Bapak Mohamad Koeswono, Bapak Eddy Yusuf
Kusdira, dan PT. Dharma Satya Nusantara
2, yang telah
bersedia direpotkan dalam proses pengambilan data
dan mempercayakan kepada penulis untuk melakukan
penelitian ini.
6. Bapak Harus Laksana Guntur, S.T., M.Eng., Dr.Eng., selaku dosen wali yang selalu memberikan dukungan dan arahan selama perkuliahan.
7. Bapak dan Ibu dosen dan karyawan Jurusan Teknik Mesin yang telah memberikan pelajaran yang berharga kepada penulis selama masa kuliah, baik berupa ilmu pengetahuan maupun ilmu tentang kehidupan.
8. My dearest bestfriend, Alya Novita Putri dan my lovely
boyfriend, Rifqi Yunus Trisna Pratama, yang tidakhenti-hentinya mengingatkan,memberikan semangat dan motivasi kepada penulis. 사랑해.
9. Aulia Rizqiaputri Viriani, teman satu perjuangan dengan topik tugas akhir yang sama.
10. Moh. Novan Ferdy R., yang telah bersedia direpotkan dalam pembuatan poster tugas akhir.
11. Teman-teman, kakak-kakak dan adek-adek di UKM IFLS yang selalu memberikan hiburan dikala penulis merasa kesusahan dalam pengerjaan laporan. 고맙다.
12. Teman-teman pejuang mbp dan teman-teman M57, yang selalu membantu, dan menghibur penulis.
13. Dan kepada semua yang membantu penulis menyelesaikan penulisan yang tidak bisa disebutkan satu persatu.
Penulis menyadari bahwa tugas akhir ini jauh dari kata sempurna. Oleh karena itu penulis mengharapkan kritik dan saran yang membangun sebagai tambahan ilmu. Akhir kata semoga tugas akhir ini dapat bermanfaat bagi kita.
Surabaya, Juli 2018 Penulis
vii DAFTAR ISI
ABSTRAK ... i
ABSTRACT ... iii
KATA PENGANTAR ...v
DAFTAR ISI ... vii
DAFTAR TABEL ... ix
DAFTAR GAMBAR ... xi
DAFTAR SIMBOL ... xii
BAB I PENDAHULUAN ...1
1.1. Latar Belakang ...1
1.2. Rumusan Masalah ...2
1.3. Tujuan Penelitian ...2
1.4. Batasan Masalah ...2
1.5. Manfaat Penelitian ...3
1.6. Sistematika Penelitian ...3
BAB II TINJAUAN PUSTAKA ...5
2.1. Sistem Aerial Ropeway / Cableway... 5
2.2. Prinsip Kerja Sistem Monocable Ropeway ... 6
2.3. Kabel ... 6
2.4. Perhitungan Kabel yang Telah Dilakukan Oleh Perusahaan ... 7
2.5. Rumus Perhitungan Tegangan Pada Kabel ... 9
2.5.1. Kabel Dibebani Oleh Satu Beban Vertikal ... 9
2.5.2. Kabel Dibebani Oleh Dua Beban Vertikal ... 12
2.6. Teori Kegagalan ... 14
2.7. Software SAP2000 ... 15
2.8. Finite Element Kabel Pada Software SAP2000 ... 16
2.9. Topologi Pemasangan Sistem Monocable Ropeway ... 18
BAB III METODOLOGI PENELITIAN ...21
3.1
Diagram Alir Penelitian ... 213.2
Tahap-Tahap Penelitian ... 223.2.1. Studi Literatur dan Menentukan Bagian Dari Sistem
Monocable Ropeway yang Akan Diteliti ... 22
3.2.2. Pengumpulan Data Tentang Kabel ... 22
3.2.3. Perhitungan Manual Tegangan Kabel Saat Kondisi Mendatar ... 23
3.2.3.1. Perhitungan Tegangan Kabel Dengan Satu Beban ... 23
3.2.3.2. Perhitungan Sag Pada Kabel Dengan Dua Beban ... 25
3.2.4. Simulasi Pada Software SAP2000 ... 26
3.2.5. Verifikasi Perhitungan Manual dan Simulasi ... 29
3.2.6. Analisa Tegangan dan Defleksi Pada Kabel Hasil Perhitungan dan Simulasi Saat Kondisi Mendatar, Menanjak dan Menurun... 30
3.2.7. Menghitung Daya yang dibutuhkan Sistem Monocable Ropeway ... 30
3.2.8. Penarikan Kesimpulan dan Saran ... 33
BAB IV HASIL DAN PEMBAHASAN ...35
4.1
Analisa Hasil Perhitungan Manual dan Simulasi Pada Kondisi Mendatar ... 354.2
Analisa Hasil Simulasi Pada Kondisi Menanjak ... 394.3
Analisa Hasil Simulasi Pada Kondisi Menurun ... 424.4
Pembahasan Daya yang Dibutuhkan Oleh Sistem Monocable Ropeway ... 44BAB V KESIMPULAN DAN SARAN ...45
5.1
Kesimpulan ... 455.2
Saran ... 45DAFTAR PUSTAKA ...47
LAMPIRAN ...49
BIOGRAFI PENULIS ...63
ix
DAFTAR TABEL
Tabel 3.1
Data Penunjang Pengerjaan Tugas Akhir ... 23Tabel 3.2
Hasil Perhitungan Manual ... 33Tabel 4.1
Data Uji Coba Simulasi Kabel Pada KondisiMendatar Dengan Satu Beban ... 36
Tabel 4.2
Perbandingan Hasil Perhitungan Manual DenganHasil Simulasi Pada Kondisi Mendatar ... 37
Tabel 4.3
Gaya Tegang dan Tegangan Normal Kabel PadaKondisi Mendatar ... 38
Tabel 4.4
Hasil Simulasi Pada Kondisi Menanjak ... 40Tabel 4.5
Gaya Tegang dan Tegangan Normal Kabel PadaKondisi Menanjak ... 41
Tabel 4.6
Hasil Simulasi Pada Kondisi Menurun ... 43Tabel 4.7
Gaya Tegang dan Tegangan Normal Kabel PadaKondisi Menurun ... 43
Tabel 4.8
Rangkuman Hasil Analisa Tegangan Kabel ... 44[Halaman Sengaja Dikosongkan]
xi
DAFTAR GAMBAR
Gambar 2.1. Sistem Monocable Ropeway ... 6
Gambar 2.2. Standard Wire Rope 19x7 ... 7
Gambar 2.3. FBD Perhitungan Kabel Oleh Perusahaan ... 8
Gambar 2.4. Free Body Diagram
Pada Sebagian Dari Kabel Dengan Pembebanan Satu Beban
. 10 Gambar 2.5. Free Body DiagramPada Sebagian Dari Kabel Dengan Pembebanan Dua Beban
. 12 Gambar 2.6. Tampilan Software SAP2000 ... 15Gambar 2.7. Cable Geometry Pada Software SAP2000 .... 17
Gambar 2.8. Topologi Pemasangan Sistem Monocable Ropeway ... 19
Gambar 3.1
Diagram Alir ... 22Gambar 3.2
Free Body Diagram Kabel Dengan Satu Beban ... 23Gambar 3.3
Free Body Diagram Kabel Dengan Dua Beban ... 25Gambar 3.4
Tampilan Material Property Data ... 27Gambar 3.5
Pemodelan Kabel Mendatar ... 28Gambar 3.6
Pemodelan Kabel Menanjak ... 28Gambar 3.7
Pemodelan Kabel Menurun ... 29Gambar 3.8
(a) Free Body Diagram Gaya Gesek Antara Kabel Dengan Pulley; (b) hubungan berat kabel (w) dengan gaya tegang kabel arah vertikal (VA) pada pulley ... 31Gambar 4.1
Defleksi Kabel Pada Kondisi Mendatar Dengan Satu Beban ... 35Gambar 4.2
Defleksi Kabel Pada Kondisi Mendatar Dengan Dua Beban ... 35Gambar 4.3 (a) Perhitungan Sederhana Tegangan
Kabel pada Kondisi Mendatar Dengan
Satu Beban; (b) Perhitungan Sederhana
Tegangan Kabel pada Kondisi Mendatar Dengan Dua Beban ... 37 Gambar 4.4
Defleksi Kabel Pada Kondisi MenanjakDengan Satu Beban ... 39
Gambar 4.5
Defleksi Kabel Pada Kondisi MenanjakDengan Dua Beban ... 39
Gambar 4.6 Perhitungan Sederhana Tegangan Kabel
Pada Kondisi Menanjak ... 41 Gambar 4.7
Defleksi Kabel Pada Kondisi MenurunDengan Satu Beban ... 42
Gambar 4.8
Defleksi Kabel Pada Kondisi MenurunDengan Dua Beban ... 42
xiii
DAFTAR SIMBOL
α, β, θ1, θ2 : sudut yang terbentuk antara kabel dengan sumbu x [°]
A0 : Luas penampang kabel sebelum pembebanan F1 [m2].
d : Diameter kabel [mm]
dx : Delta panjang kabel searah sumbu x [m].
dz : Delta panjang kabel searah sumbu z [m].
ds : Delta panjang busur unstrained cable [m].
dp : Delta panjang busur strained cable [m].
dh : Jarak antar tiang [m].
E : Modulus Elastisitas bahan dari kabel [Pa].
Ep : Energi potensial beban [J].
Eloss : Energi yang hilang akibat gaya gesek [J]
ε : Renggangan yang terjadi pada kabel.
F, F1, F2 : Beban vertikal yang bekerja pada kabel [N].
H : Gaya tegang kabel arah horizontal [N].
L0 : Panjang kabel sebelum pembebanan F [m].
𝓁 : defleksi kabel pada perhitungan oleh perusahaan [m].
P : Daya yang dibutuhkan sistem [HP]
qc : Berat kabel persatuan panjang kabel (kg/m).
s : Panjang lintasan yang ditempuh = panjang kabel dari titik A [m].
s1 : Panjang kabel dari titik A sampai pembebanan F1 [m].
s2 : Panjang kabel dari titik A sampai pembebanan F2 [m].
σN : Tegangan normal pada kabel [N/mm2].
σy : Yield strength pada kabel [N/mm2].
t : Waktu yang dibutuhkan untuk menempuh jarak s [det].
T, T1, T2 : Gaya tegang kabel [N].
v : Kecepatan kabel berjalan [m/det]
VA : Gaya tegang kabel arah vertikal = gaya reaksi pada tumpuan [N].
x : Defleksi kabel searah sumbu x [m].
z : Defleksi kabel searah sumbu z [m].
[Halaman Sengaja Dikosongkan]
1 BAB I PENDAHULUAN 1.1. Latar Belakang
Industri perkebunan kelapa sawit merupakan sektor usaha non migas yang menghasilkan keuntungan besar bagi Indonesia.
Pada tahun 2011 total ekspor mencapai 17,87 juta ton dengan total nilai sebesar USD 19,37 milyar, dan meningkat menjadi 24,33 juta ton dengan total nilai sebesar USD 16,27 milyar pada tahun 2016 (BPS, 2017). Buah kelapa sawit dapat digunakan sebagai bahan mentah dari minyak goreng, margarine, sabun, kosmetik, serta sebagai bahan dari industri farmasi. Saat ini, perkembangan industri kelapa sawit sangat pesat karena jumlah produksi kelapa sawit meningkat seiring dengan meningkatnya kebutuhan manusia.
Melihat peningkatan jumlah kelapa sawit yang diekspor namun tidak diiringi dengan meningkatnya harga kelapa sawit, menjadi salah satu pertimbangan untuk memperbaiki sistem produksi, salah satunya proses pengangkutan kelapa sawit. Pada saat ini kelapa sawit diangkut menggunakan truk dan wintor.
Dalam penggunaan truk maupun wintor, terdapat beberapa kendala, yaitu pertama harga dan ketersediaan akan bahan bakar. Seperti yang telah diketahui, bahan bakar minyak dalam hal ini khususnya solar, merupakan sumber daya alam yang tidak dapat diperbaharui sehingga ketersediaannya semakin lama semakin menipis.
Selanjutnya yaitu masalah lingkungan. Sebagai alat transportasi di darat, truk dan wintor pasti membutuhkan jalur untuk berjalan.
Dalam pembuatan jalur tersebut, maka dilakukan pemangkasan pohon dan pemadatan tanah. Pemangkasan pohon selain dapat memperparah efek global warming, juga dapat merusak ekosistem hutan tersebut. Ketiga terus meningkatnya biaya untuk fasilitas dan tenaga kerja dapat mengakibatkan kesulitan pengadaan tenaga kerja.
Untuk mengatasi kendala tersebut, dapat dilakukan dengan menerapkan sistem transportasi aerial ropeway. Salah satunya menggunakan sistem monocable ropeway. Penggunaan sistem
monocable ropeway untuk pengangkutan kelapa sawit merupakan hal baru di Indonesia, sehingga perlu dilakukan penelitian disetiap bagiannya. Salah satu yang perlu dilakukan penelitian adalah kekuatan kabel dari sistem tersebut, karena kabel merupakan komponen utama dalam sistem ini.
1.2. Rumusan Masalah
Berdasarkan dari uraian latar belakang tersebut, perumusan masalah yang akan diselesaikan pada penelitian ini adalah sebagai berikut :
1. Bagaimana menganalisa tegangan dan defleksi kabel pada sistem monocable ropeway yang digunakan dalam proses pengangkutan kelapa sawit dalam beberapa kondisi yaitu posisi mendatar, menanjak, dan menurun?
2. Bagaimana menghitung daya yang dibutuhkan untuk menjalankan sistem monocable ropeway?
1.3. Tujuan Penelitian
Tujuan dilakukannya penelitian ini adalah sebagai berikut : 1. Untuk menganalisa tegangan dan defleksi kabel pada sistem monocable ropeway yang digunakan dalam proses pengangkutan kelapa sawit dalam beberapa kondisi yaitu posisi mendatar, menanjak, dan menurun.
2. Untuk menghitung daya yang dibutuhkan untuk menjalankan sistem monocable ropeway.
1.4. Batasan Masalah
Penelitian ini memiliki batasan masalah sebagai berikut : 1. Kabel yang digunakan yaitu Standard Wire Rope 19 x 7
dengan spesifikasi sebagai berikut :
a. Tensile strength : 1960 N/mm2.
b. Diameter kabel : 16 mm.
c. MBL : 210 kN.
d. Massa per satuan Panjang : 1,57 kg/m.
2. Jarak antar tiang penyangga kabel adalah 50 meter.
3
3. Jarak antar basket/pembawa adalah 25 meter.
4. Kapasitas muat per-basket adalah 50 s/d 100 kg.
5. Kecepatan kabel berjalan adalah 4 km/jam.
6. Topografi berbukit-bukit dengan kemiringan maksimal adalah 30°.
7. Software yang digunakan untuk simulasi kabel adalah SAP2000 v.19.
1.5. Manfaat Penelitian
Manfaat dari penelitian ini adalah :
1. Sebagai media mengaplikasikan dan menerapkan ilmu yang telah diperoleh selama proses perkuliahan.
2. Hasil dari penelitian dapat digunakan sebagai referensi perancangan dan pengembangan sistem monocable ropeway kedepannya agar menjadi lebih baik.
3. Memberikan informasi mengenai kabel yang digunakan sebagai alat transportasi.
1.6. Sistematika Penulisan
Penulisan Tugas akhir ini terdiri dari abstrak yang berisi gambaran umum dari penelitian ini. Bab I pendahuluan yang memuat latar belakang, rumusan masalah, tujuan penelitian, batasan masalah, manfaat penelitian, serta sistematika penulisan.
Bab II tinjauan pustaka berisi tentang dasar-dasar teori yang digunakan sebagai acuan dari penelitian, Bab III metodologi penelitian, Bab IV hasil penelitian dan pembahasannya, dan Bab V kesimpulan dan saran.
[Halaman Sengaja Dikosongkan]
5 BAB II
TINJAUAN PUSTAKA 2.1. Sistem Aerial Ropeway / Cableway
Sistem aerial ropeway / cableway merupakan sebuah sistem transportasi yang dapat digunakan untuk memindahkan orang dan barang berupa kendaraan yang digantung dan dipindahkan menggunakan wire rope. Sistem aerial ropeway pertama kali digagas oleh Adam Wybe pada tahun 1644 di kota Dantsig (sekarang Gdansk), digunakan untuk menghubungkan benteng kota dengan bukit di luar kota (Booth, 1965). Secara tradisional, sistem aerial ropeway telah digunakan sebagai sistem transportasi untuk mengukur lereng curam dan melintasi lembah maupun menyeberangi perairan. Saat ini, sistem aerial ropeway banyak digunakan untuk layanan lokal atau tujuan wisata dan ada yang menggunakannya sebagai jaringan transportasi umum utama.
Sistem aerial ropeway dapat diklasifikasikan menjadi dua yaitu sistem monocable ropeway dan sistem bicable ropeway, sesuai dengan jumlah kabel yang digunakan untuk memindahkan carrier (pembawa). Pada sistem bicable ropeway menggunakan dua kabel dimana satu kabel berfungsi sebagai penyangga pembawa dan kabel yang lain berfungsi sebagai penarik carrier.
Sedangkan pada sistem monocable ropeway, kedua fungsi tersebut dilakukan oleh satu kabel (Löhr).
Sistem aerial ropeway juga dapat juga diklasifikasikan menurut apakah klipnya tetap (fixed) atau bisa dilepas (detachable) (Löhr). Pada sistem fixed-clip, carrier akan melekat secara permanen pada kabel pengangkut. Sedangkan pada sistem detachable-clip, secara manual ataupun otomatis, carrier akan terpisah dari kabel yang terus berjalan saat memasuki stasiun.
Kemudian carrier akan bergerak di sepanjang rel lalu diikat kembali ke kabel yang bergerak. Fitur ini memungkinkan fleksibilitas dalam bongkar muat carrier serta kemudahan perawatan dan mudahnya pemindahan atau penambahan carrier tanpa mempengaruhi pengoperasian ropeway. Komponen utama
pada Aerial Ropeway yaitu : kabel / tali; carrier; tiang / tower; dan pulley / sheave.
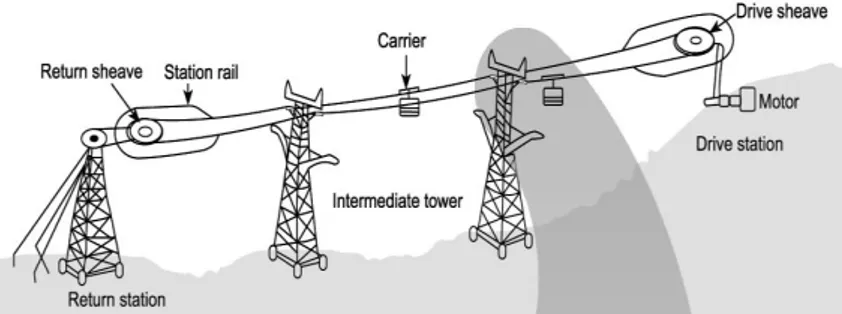
2.2. Prinsip Kerja Sistem Monocable Ropeway
Gambar 2.1 Sistem Monocable Ropeway (Gewali, 2004)
Gambar 2.1 merupakan contoh sistem monocable ropeway yang menggunakan detachable-clip, dimana ketika carrier memasuki drive station maupun return station, carrier akan terpisah dari kabel dan berjalan pada station rail dan akan diikat kembali ke kabel. Sistem tersebut menggunakan sebuah kabel yang mana memiliki dua fungsi yaitu untuk penahan beban dan untuk menggerakkan carrier. Kabel akan digerakkan oleh pulley yang tersambung pada driver unit. Ketika kabel bergerak, carrier tersebut juga akan bergerak.
2.3. Kabel
Kabel pada ropeway tersebut terbuat dari beberapa helai kawat baja yang dipintal bersama. Pada bagian dalam kabel, inti bisa berupa untaian kawat baja, atau sebuah kawat baja independen, bisa juga berupa inti serat (fibre core). Kabel yang memiliki inti baja, memiliki fleksibilitas yang kurang namun lebih kuat dari kabel yang memiliki inti serat dengan ukuran yang sama. Kekuatan kabel ini berfungsi untuk mempertahankan bentuknya di bawah tekanan permukaan tinggi, dimana dapat dipastikan bahwa beban
7
didistribusikan secara merata di antara kabel. Pada umumnya, kabel berinti serat digunakan sebagai penggerak carrier.
Gambar 2.2 Standard Wire Rope 19x7 (Katalog Vermeulen Europoort)
Pada batasan masalah telah ditentukan bahwa penelitian ini menggunakan standard wire rope 19x7 (gambar 2.2). Makna dari 19x7 yaitu terdapat 19 strands pada kabel dimana setiap strand terdapat 7 steel wire. Kabel tipe ini banyak digunakan sebagai tali pengangkat pada crane. Terdapat dua jenis berbeda pada kabel ini, yang pertama memiliki tensile strength sebesar 1960 N/mm2 sedangkan yang kedua memilki tensile strength sebesar 2160 N/mm2. Tensile strength sendiri akan berpengaruh terhadap Minimum Breaking Load (MBL) kabel. MBL adalah sampel secara statistik dari ultimate strength ketika diuji kegagalan.
2.4. Perhitungan Kabel yang Telah Dilakukan Oleh Perusahaan
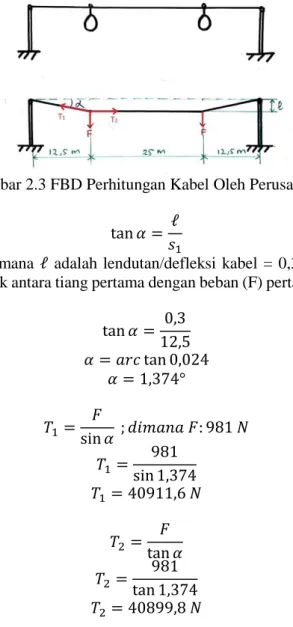
Selama ini, perhitungan yang dilakukan di lapangan dilakukan secara sederhana (gambar 2.3), yaitu dengan mengasumsikan kabel sebagai garis linear atau garis lurus. Dengan menggunakan hukum kesetimbangan gaya, maka akan diperoleh besar tegangan kabel, seperti yang tertulis dibawah. Namun, pada kenyataannya, pada kabel sendiri terdapat beban merata yang disebabkan oleh berat kabel itu sendiri, sehingga kabel tidak dapat diasumsikan sebagai garis linear. Akibat beban merata pada kabel, menyebabkan kabel berbentuk melengkung seperti kurva sesuai riset yang telah dilakukan oleh Daniel Papini pada tahun 2010.
Gambar 2.3 FBD Perhitungan Kabel Oleh Perusahaan tan 𝛼 = 𝓁
𝑠1
Dimana 𝓁 adalah lendutan/defleksi kabel = 0,3 m dan s1
adalah jarak antara tiang pertama dengan beban (F) pertama = 12,5 m.
tan 𝛼 = 0,3 12,5 𝛼 = 𝑎𝑟𝑐 tan 0,024
𝛼 = 1,374°
𝑇1= 𝐹
sin 𝛼 ; 𝑑𝑖𝑚𝑎𝑛𝑎 𝐹: 981 𝑁 𝑇1= 981
sin 1,374 𝑇1= 40911,6 𝑁
𝑇2= 𝐹 tan 𝛼 𝑇2= 981
tan 1,374 𝑇2= 40899,8 𝑁
9
2.5. Rumus Perhitungan Tegangan Pada Kabel 2.5.1. Kabel Dibebani Oleh Satu Beban Vertikal.
Asumsi-asumsi berikut dibuat dengan memperhatikan sifat-sifat pada kabel :
1. Karena adanya prinsip kekekalan massa, maka setiap bagian kabel yang terletak di antara dua penampang yang tegak lurus dengan garis tengah kabel, akan mempertahankan massanya selama terjadi deformasi. Sehingga berat kabel pada gambar 2.4 dapat ditulis sebagai 𝑊
𝐿0𝑠 = 𝑞𝑐𝑠.
2. Kabel tidak memiliki flexural rigidity.
3. Satu-satunya tegangan yang terjadi pada kabel adalah tegangan tarik normal aksial (σN), dimana σN = T(s); yang didistribusikan secara merata di setiap penampang tegak lurus dengan garis tengah kabel.
4. Dalam arah aksial, kabel mengalami strain yang sangat kecil.
Oleh karena itu, persamaan untuk regangan aksial (ε) yaitu : 𝜀 = 𝑓𝜀(𝑠) = 𝑑𝑝−𝑑𝑠
𝑑𝑠 =𝑑𝑝
𝑑𝑠− 1 ... (2.1) Dengan menggunakan persamaan (2.1), bersama dengan asumsi bahwa tegangan normal cross-sectional σN terdistribusi merata pada setiap penampang, tegangan kabel T dapat ditulis sebagai
𝑇 = 𝑓𝑇(𝑠) = 𝜎𝑁 . 𝐴0 = 𝐸 . 𝜀 . 𝐴0= 𝐸𝐴0(𝑑𝑝
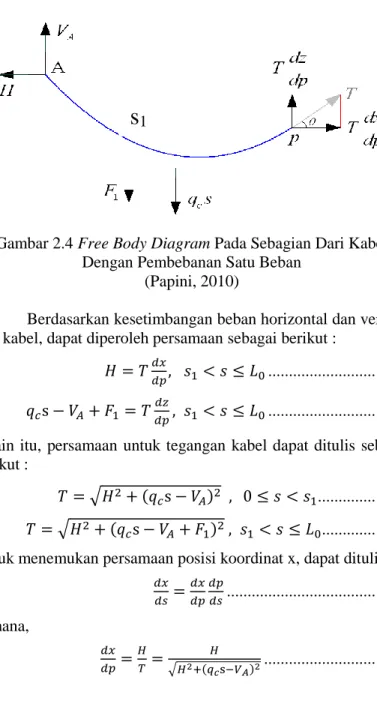
𝑑𝑠− 1) .. (2.2) Free body diagram pada gambar 2.4, merupakan dasar diperolehnya persamaan tegangan dan defleksi kabel dengan pembebanan satu beban pada jarak s1. Selain mendapat pengaruh dari beban F1, tegangan dan defleksi kabel juga dipengaruhi oleh berat kabel itu sendiri yang mana disimbolkan sebagai qc. Hubungan antara dx, dz, dp dengan θ dapat dilihat pada persamaan berikut :
𝑑𝑧
𝑑𝑝= sin(𝜃) , 𝑑𝑥𝑑𝑝= cos(𝜃) , 𝑑𝑧𝑑𝑥= tan (𝜃) ... (2.3)
Gambar 2.4 Free Body Diagram Pada Sebagian Dari Kabel Dengan Pembebanan Satu Beban
(Papini, 2010)
Berdasarkan kesetimbangan beban horizontal dan vertikal dari kabel, dapat diperoleh persamaan sebagai berikut :
𝐻 = 𝑇𝑑𝑥
𝑑𝑝, 𝑠1 < 𝑠 ≤ 𝐿0 ... (2.4) 𝑞𝑐s − 𝑉𝐴+ 𝐹1= 𝑇𝑑𝑧
𝑑𝑝, 𝑠1 < 𝑠 ≤ 𝐿0 ... (2.5) Selain itu, persamaan untuk tegangan kabel dapat ditulis sebagai berikut :
𝑇 = √𝐻2+ (𝑞𝑐s − 𝑉𝐴)2 , 0 ≤ 𝑠 < 𝑠1 ... (2.6) 𝑇 = √𝐻2+ (𝑞𝑐s − 𝑉𝐴+ 𝐹1)2 , 𝑠1< 𝑠 ≤ 𝐿0... (2.7) Untuk menemukan persamaan posisi koordinat x, dapat ditulis,
𝑑𝑥 𝑑𝑠=𝑑𝑥
𝑑𝑝 𝑑𝑝
𝑑𝑠 ... (2.8) Dimana,
𝑑𝑥 𝑑𝑝=𝐻
𝑇 = 𝐻
√𝐻2+(𝑞𝑐s−𝑉𝐴)2 ... (2.9)
s
111
Sedangkan 𝑑𝑝
𝑑𝑠 dapat dicari dengan menggunakan persamaan 2.1, 2.2, dan 2.6, yaitu,
𝑑𝑝
𝑑𝑠= 𝜀 + 1 =𝐸𝐴𝑇
0+ 1 =√𝐻2+(𝑞𝐸𝐴𝑐s−𝑉𝐴)2
0 + 1 ... (2.10) Sehingga,
𝑑𝑥
𝑑𝑠= ( 𝐻
√𝐻2+(𝑞𝑐s−𝑉𝐴)2) (√𝐻2+(𝑞𝑐s−𝑉𝐴)2
𝐸𝐴0 + 1) ... (2.11)
𝑑𝑥 𝑑𝑠=𝐸𝐴𝐻
0+ 𝐻
√𝐻2+(𝑞𝑐s−𝑉𝐴)2 ... (2.12) Dengan melakukan integrasi,
∫ 𝑑𝑥𝑥𝑥
𝐴 = ∫ 𝐻
𝐸𝐴0𝑑𝑠
𝑠
𝑠𝐴 + ∫ 𝐻
√𝐻2+(𝑞𝑐s−𝑉𝐴)2𝑑𝑠
𝑠
𝑠𝐴 ... (2.13) Maka diperoleh persamaan x sebagai berikut:
𝑥 = 𝑥𝐴+ 𝐻
𝐸𝐴0𝑠 +𝐻
𝑞𝑐(𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠−𝑉𝐴
𝐻 ) − 𝑠𝑖𝑛ℎ−1(−𝑉𝐴
𝐻)) , 0 ≤ 𝑠 ≤ 𝑠1 ... (2.14) 𝑥 = 𝑥𝐴+ 𝐻
𝐸𝐴0𝑠 +𝐻
𝑞𝑐(𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠−𝑉𝐴+𝐹1
𝐻 ) −
𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠1−𝑉𝐴+𝐹1
𝐻 ) + 𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠1−𝑉𝐴
𝐻 ) − 𝑠𝑖𝑛ℎ−1(−𝑉𝐴
𝐻)) , 𝑠1≤ 𝑠 ≤ 𝐿0 ... (2.15) Dengan langkah yang sama, diperoleh persamaan z sebagai berikut:
𝑧 = 𝑧𝐴+ 1
𝐸𝐴0(𝑞𝑐
2 𝑠2− 𝑉𝐴𝑠) + 1
𝑞𝑐(√𝐻2+ (𝑞𝑐s − 𝑉𝐴)2−
√𝐻2+ 𝑉𝐴2) , 0 ≤ 𝑠 ≤ 𝑠1 ... (2.16)
𝑧 = 𝑧𝐴+ 1
𝐸𝐴0(𝑞𝑐
2 𝑠2− 𝑉𝐴𝑠 + 𝐹1𝑠 − 𝐹1𝑠1) +
1
𝑞𝑐(√𝐻2+ (𝑞𝑐s − 𝑉𝐴+ 𝐹1)2−
√𝐻2+ (𝑞𝑐𝑠1− 𝑉𝐴+ 𝐹1)2+ √𝐻2+ (𝑞𝑐𝑠1− 𝑉𝐴)2−
√𝐻2+ 𝑉𝐴2) , 𝑠1≤ 𝑠 ≤ 𝐿0 ... (2.17)
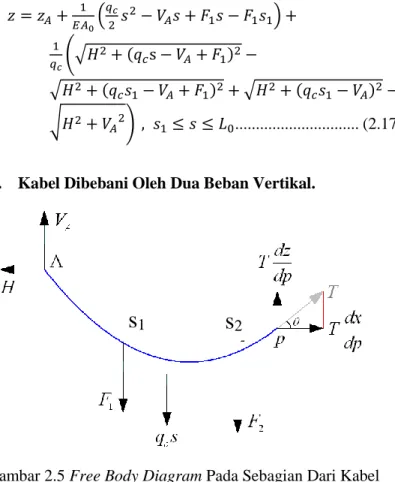
2.5.2. Kabel Dibebani Oleh Dua Beban Vertikal.
Gambar 2.5 Free Body Diagram Pada Sebagian Dari Kabel Dengan Pembebanan Dua Beban
(Papini, 2010)
Free body diagram pada gambar 2.5, merupakan dasar diperolehnya persamaan tegangan dan defleksi kabel dengan pembebanan dua beban F pada jarak s1 dan s2. Selain mendapat pengaruh dari beban F1 dan F2, tegangan dan defleksi kabel juga dipengaruhi oleh berat kabel itu sendiri yang mana disimbolkan sebagai qc.
s
1s
213
Seperti pada kabel yang dibebani oleh satu gaya vertikal, dapat diperoleh persamaan berdasarkan kesetimbangan beban horizontal dan vertikal dari kabel.
𝐻 = 𝑇𝑑𝑥𝑑𝑝, 𝑠2< 𝑠 ≤ 𝐿0 ... (2.18) 𝑞𝑐s − 𝑉𝐴+ 𝐹1+ 𝐹2= 𝑇𝑑𝑧
𝑑𝑝, 𝑠2< 𝑠 ≤ 𝐿0 ... (2.19) Dan persamaan untuk tegangan kabel dapat ditulis sebagai berikut:
𝑇 = √𝐻2+ (𝑞𝑐s − 𝑉𝐴)2 , 0 ≤ 𝑠 < 𝑠1 ... (2.20) 𝑇 = √𝐻2+ (𝑞𝑐s − 𝑉𝐴+ 𝐹1)2 , 𝑠1< 𝑠 < 𝑠2 ... (2.21) 𝑇 = √𝐻2+ (𝑞𝑐s − 𝑉𝐴+ 𝐹1+ 𝐹2)2 , 𝑠2< 𝑠 ≤ 𝐿0 .... (2.22) Lalu dilakukan substitusi dan integrasi, sehingga didapat persamaan x sebagai berikut:
𝑥 = 𝑥𝐴+ 𝐻
𝐸𝐴0𝑠 +𝐻
𝑞𝑐(𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠−𝑉𝐴
𝐻 ) − 𝑠𝑖𝑛ℎ−1(−𝑉𝐴
𝐻)) , 0 ≤ 𝑠 ≤ 𝑠1 ... (2.23) 𝑥 = 𝑥𝐴+ 𝐻
𝐸𝐴0𝑠 +𝐻
𝑞𝑐(𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠−𝑉𝐴+𝐹1
𝐻 ) −
𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠1−𝑉𝐻𝐴+𝐹1) + 𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠1𝐻−𝑉𝐴) − 𝑠𝑖𝑛ℎ−1(−𝑉𝐴
𝐻)) , 𝑠1≤ 𝑠 ≤ 𝑠2 ... (2.24) 𝑥 = 𝑥𝐴+ 𝐻
𝐸𝐴0𝑠 +𝐻
𝑞𝑐(𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠−𝑉𝐴+𝐹1+𝐹2
𝐻 ) −
𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠1−𝑉𝐴+𝐹1+𝐹2
𝐻 ) + 𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠2−𝑉𝐴+𝐹1
𝐻 ) −
𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠1−𝑉𝐴+𝐹1
𝐻 ) + 𝑠𝑖𝑛ℎ−1(𝑞𝑐𝑠1−𝑉𝐴
𝐻 ) − 𝑠𝑖𝑛ℎ−1(−𝑉𝐴
𝐻)) , 𝑠2≤ 𝑠 ≤ 𝐿0... (2.25) Dan persamaan z sebagai berikut:
𝑧 = 𝑧𝐴+𝐸𝐴1
0(𝑞2𝑐𝑠2− 𝑉𝐴𝑠) +𝑞1
𝑐(√𝐻2+ (𝑞𝑐s − 𝑉𝐴)2−
√𝐻2+ 𝑉𝐴2) , 0 ≤ 𝑠 ≤ 𝑠1 ... (2.26) 𝑧 = 𝑧𝐴+ 1
𝐸𝐴0(𝑞𝑐
2 𝑠2− 𝑉𝐴𝑠 + 𝐹1𝑠 − 𝐹1𝑠1) + 1
𝑞𝑐(√𝐻2+ (𝑞𝑐s − 𝑉𝐴+ 𝐹1)2−
√𝐻2+ (𝑞𝑐𝑠1− 𝑉𝐴+ 𝐹1)2+ √𝐻2+ (𝑞𝑐𝑠1− 𝑉𝐴)2−
√𝐻2+ 𝑉𝐴2) , 𝑠1≤ 𝑠 ≤ 𝑠2 ... (2.27) 𝑧 = 𝑧𝐴+ 1
𝐸𝐴0(𝑞𝑐
2 𝑠2− 𝑉𝐴𝑠 + (𝐹1+ 𝐹2)𝑠 − 𝐹1𝑠1− 𝐹2𝑠2) +
1
𝑞𝑐(√𝐻2+ (𝑞𝑐s − 𝑉𝐴+ 𝐹1+ 𝐹2)2−
√𝐻2+ (𝑞𝑐𝑠2− 𝑉𝐴+ 𝐹1+ 𝐹2)2+
√𝐻2+ (𝑞𝑐𝑠2− 𝑉𝐴+ 𝐹1)2−
√𝐻2+ (𝑞𝑐𝑠1− 𝑉𝐴+ 𝐹1)2+ √𝐻2+ (𝑞𝑐𝑠1− 𝑉𝐴)2−
√𝐻2+ 𝑉𝐴2) , 𝑠2≤ 𝑠 ≤ 𝐿0 ... (2.28) Apabila penopang pada ujung kabel berada pada level vertikal yang sama, dan gaya luar vertikal yang bekerja pada kabel berada pada posisi simetris dengan besar nilai yang sama, maka kabel akan berbentuk simetris sehingga nilai VA dapat dihitung menggunakan persamaan
𝑉𝐴= 𝑉𝐴𝑠𝑦𝑚=1
2(𝑞𝑐𝐿0+ ∑𝑁𝑖=0𝐹 𝐹𝑖) ... (2.29) 2.6. Teori Kegagalan
Permasalahan yang sering dihadapi oleh para engineer adalah memilih material yang tepat dan lebih spesifik karena berpengaruh terhadap kegagalan dari material tersebut. Kegagalan pada material yang ulet adalah ketika permulaan dari peluluhan
15
material tersbut, sedangkan pada material yang getas, kegagalan dapat disebut dengan fracture (patah).
Berdasarkan teori tegangan normal maksimum yang menyatakan bahwa “kegagalan akan terjadi ketika tegangan normal maksimum yang terjadi melebihi tegangan luluhnya (yield strength)”. Sehingga apabila tegangan normal (σN) maksimun yang terjadi kurang dari sama dengan yield strength (σy), maka kondisi tersebut dapat dikatakan aman. Kondisi tersebut dapat dirumuskan sebagai berikut :
σN ≤ σy ... (2.30) 2.7. Software SAP2000
Gambar 2.6 Tampilan Software SAP2000
SAP2000 (Structure Analysis Program 2000) merupakan salah satu software yang digunakan untuk analisis struktur.
SAP2000 ini terhitung lengkap dan sangat mudah untuk dioperasikan. Prinsip utama penggunaan program ini adalah pemodelan struktur, eksekusi analisis, dan pemeriksaan atau optimasi desain. Semua proses tersebut dapat dilakukan dalam satu langkah atau satu tampilan. Tampilan SAP2000 ini berupa model secara real time sehingga memudahkan pengguna untuk
melakukan pemodelan secara menyeluruh dalam waktu singkat namun dengan hasil yang tepat. Selain itu, output yang dihasilkan juga dapat ditampilkan sesuai dengan kebutuhan, bisa berupa model struktur, grafik, maupun spreadsheet. Semuanya dapat disesuaikan dengan kebutuhan untuk penyusunan laporan analisis dan desain. Analisis SAP2000 menggunakan finite element methode baik untuk static analysis maupun untuk dynamic analysis (nonlinear analysis).
Beberapa kemampuan yang dimiliki oleh program ini antara lain :
1. Analisis yang cepat dan akurat.
2. Model pembebanan yang lebih lengkap baik berupa static loading maupun dynamic loading.
3. Pemodelan elemen shell yang lebih akurat.
4. Analisis dinamik dengan Ritz dan Eigenvalue
5. Sistem koordinat ganda untuk bentuk geometri struktur yang kompleks.
2.8. Finite Element Kabel Pada Software SAP2000
Finite Element Method (FEM) merupakan suatu metode numerik untuk menyelesaikan masalah-masalah rekayasa dan fisika matematika. Mempelajari atau menganalisis suatu fenomena dengan FEM sering disebut sebagai Finite Element Analysis (FEA).
Penyelesaian masalah dengan menggunakan FEM dilakukan dengan membagi benda yang akan dianalisa menjadi bagian- bagian yang lebih kecil dan lebih sederhana yang disebut elemen- elemen hingga. Proses pembagian tersebut dikenal sebagai meshing. Antar elemen-elemen dihubungkan oleh node. Pada setiap elemen-elemen hingga akan diperoleh persamaan matematis sederhana yang memodelkan elemen hingga ini. Kemudian persamaan tersebut dirangkai menjadi sistem persamaan yang lebih besar yang akan memodelkan seluruh masalah. Sesuai penjelasan tersebut, maka penyelesaian masalah untuk kabel dengan menggunakan FEM akan dilakukan dengan membagi kabel menjadi segmen-segmen yang lebih kecil.
17
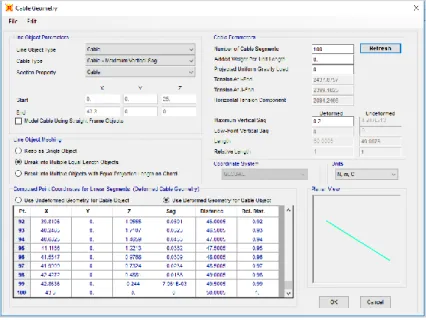
Gambar 2.7 Cable Geometry Pada Software SAP2000 Pada SAP2000, elemen kabel merupakan elemen nonlinear yang digunakan untuk memodelkan perilaku catenary.
Perilaku catenary yaitu perilaku terbentuknya kurva pada kabel maupun rantai yang digantung di bawah pengaruh oleh beratnya sendiri ketika hanya ditumpu pada ujungnya. Kurva catenary memiliki bentuk mirip U, tampak serupa dengan kelengkungan parabola, tetapi bukan parabola. Pada SAP2000, tension-stiffening dan defleksi yang tidak linier pada kabel secara inheren sudah termasuk dalam formulasi. Ketika menggambar kabel pada SAP2000, tab Cable Geometry akan muncul. Seperti dapat dilihat pada gambar 2.7, pada kotak Line Object Meshing, terdapat pilihan bagaimana analisa pada kabel yang diinginkan. Apakah menganggap kabel sebagai satu objek atau dibagi menjadi beberapa objek. Objek disini memiliki arti sama dengan elemen maupun segmen. Pembagian kabel menjadi segmen-segmen kecil dilakukan pada kotak Cable Parameters. Pada bagian Number of
Cable Segments, dapat diisi dengan jumlah segmen yang diinginkan untuk membagi kabel tersebut. Perilaku catenary dari kabel dapat dilihat pada kotak Planar View, dimana detail posisi dan defleksi kabel dapat diketahui secara lebih rinci setiap segmen dari kabel pada tabel disebelah planar view.
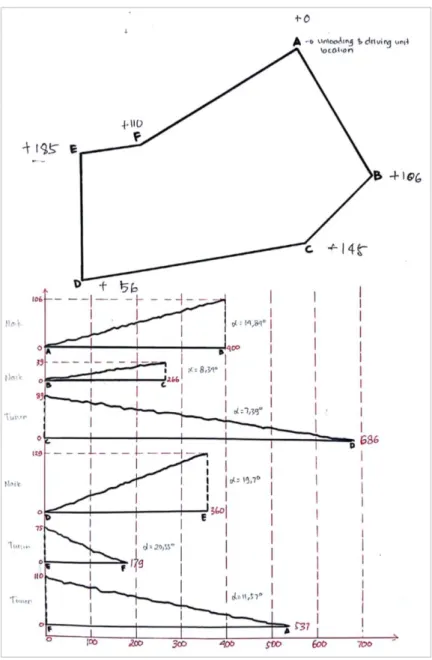
2.9. Topologi Pemasangan Sistem Monocable Ropeway Jalur pemasangan sistem monocable ropeway dapat dilihat pada gambar 2.8. Proses unloading dan lokasi driving unit terletak pada posisi A, dimana dianggap sebagai posisi terendah dari sistem tersebut. Angka yang tertera di dekat masing-masing huruf penunjuk posisi merupakan ketinggian setiap posisi terhadap posisi A, dimana posisi tertinggi terletak pada posisi E dengan ketinggian 185 m di atas A.
Denah topologi ini berguna untuk menghitung daya mesin yang dibutuhkan oleh sistem. Daya mesin dapat dihitung dari energi yang dibutuhkan dibagi dengan waktu yang dibutuhkan seperti dapat dilihat pada persamaan 2.31 :
𝑃 =𝐸𝑡𝑜𝑡𝑡 ... (2.31) Energi yang dibutuhkan oleh sistem dapat dihitung menggunakan persamaan energi potensial ditambah dengan energi yang hilang akibat dari gesekan, seperti pada persamaan 2.32.
𝐸𝑡𝑜𝑡= 𝐸𝑝 + 𝐸𝑙𝑜𝑠𝑠 ... (2.32) 𝐸𝑡𝑜𝑡= 𝑚 . 𝑔 . ℎ + 𝑓𝑔𝑒𝑠𝑒𝑘 . 𝑠 ... (2.33) Untuk waktu yang dibutuhkan sendiri dapat dihitung menggunakan persamaan gerak lurus beraturan dimana nilai kecepatan pada sistem adalah konstan, sehingga dapat menggunakan persamaan 2.34, dimana s adalah jarak yang ditempuh dari posisi awal hingga posisi tertinggi.
𝑡 =𝑠
𝑣 ... (2.34)
19
Gambar 2.8 Topologi Pemasangan Sistem Monocable Ropeway
[Halaman Sengaja Dikosongkan]
21 BAB III
METODOLOGI PENELITIAN 3.1 Diagram Alir Penelitian
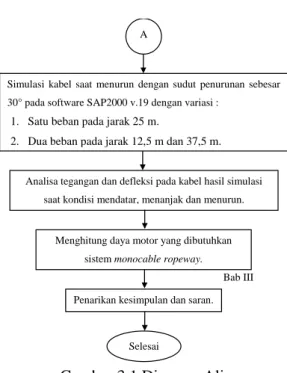
Pada penelitian tugas akhir ini tahapan-tahapan yang ada mengikuti diagram alir seperti pada gambar 3.1.
Mulai
Studi literatur dan menentukan bagian dari sistem monocable ropeway yang akan diteliti
Pengumpulan data tentang kabel
Perhitungan manual tegangan kabel saat mendatar dengan variasi :
1. Satu beban pada jarak 25 m.
2. Dua beban pada jarak 12,5 m dan 37,5 m.
Simulasi kabel saat mendatar pada software SAP2000 v.19 dengan variasi :
1. Satu beban pada jarak 25 m.
2. Dua beban pada jarak 12,5 m dan 37,5 m.
Verifikasi, apakah hasil perhitungan manual dengan hasil simulasi dapat dikomparasikan?
Simulasi kabel saat menanjak dengan sudut kenaikan sebesar 30°
pada software SAP2000 v.19 dengan variasi : 1. Satu beban pada jarak 25 m.
2. Dua beban pada jarak 12,5 m dan 37,5 m.
A Tidak
Ya
Bab III Bab IV
Gambar 3.1 Diagram Alir 3.2 Tahap-Tahap Penelitian
3.2.1. Studi Literatur dan Menentukan Bagian Dari Sistem Monocable Ropeway yang Akan Diteliti
Pada tahap ini, dilakukan studi literatur tentang ropeway system secara umum. Kemudian dilakukan pendalaman pada monocable ropeway system dan lebih spesifik lagi, dilakukan pendalaman materi mengenai kabel. Hal yang menjadi dasar dari identifikasi masalah telah dijelaskan sebelumnya pada latar belakang.
3.2.2. Pengumpulan Data Tentang Kabel
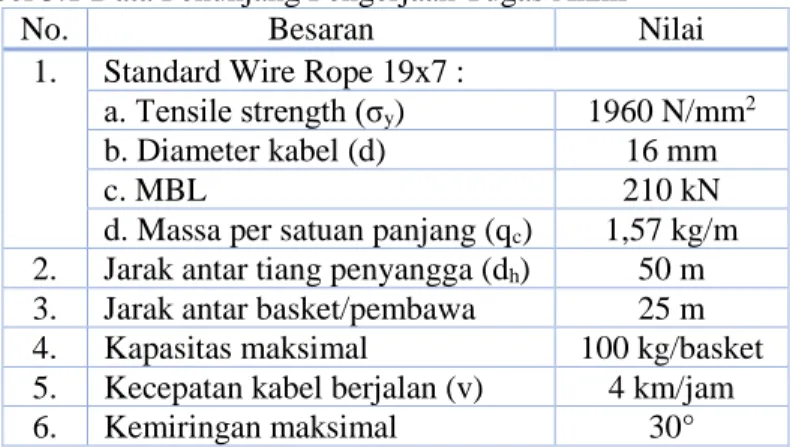
Pengumpulan data dilakukan untuk menunjang pengerjaan Tugas Akhir. Data-data yang diperoleh antara lain seperti yang tercantum pada tabel 3.1.
A
Simulasi kabel saat menurun dengan sudut penurunan sebesar 30° pada software SAP2000 v.19 dengan variasi :
1. Satu beban pada jarak 25 m.
2. Dua beban pada jarak 12,5 m dan 37,5 m.
Analisa tegangan dan defleksi pada kabel hasil simulasi saat kondisi mendatar, menanjak dan menurun.
Menghitung daya motor yang dibutuhkan sistem monocable ropeway.
Penarikan kesimpulan dan saran.
Selesai
Bab III
23
Tabel 3.1 Data Penunjang Pengerjaan Tugas Akhir
No. Besaran Nilai
1. Standard Wire Rope 19x7 :
a. Tensile strength (σy) 1960 N/mm2
b. Diameter kabel (d) 16 mm
c. MBL 210 kN
d. Massa per satuan panjang (qc) 1,57 kg/m 2. Jarak antar tiang penyangga (dh) 50 m 3. Jarak antar basket/pembawa 25 m 4. Kapasitas maksimal 100 kg/basket 5. Kecepatan kabel berjalan (v) 4 km/jam
6. Kemiringan maksimal 30°
3.2.3. Perhitungan Manual Tegangan Kabel Saat Kondisi Mendatar
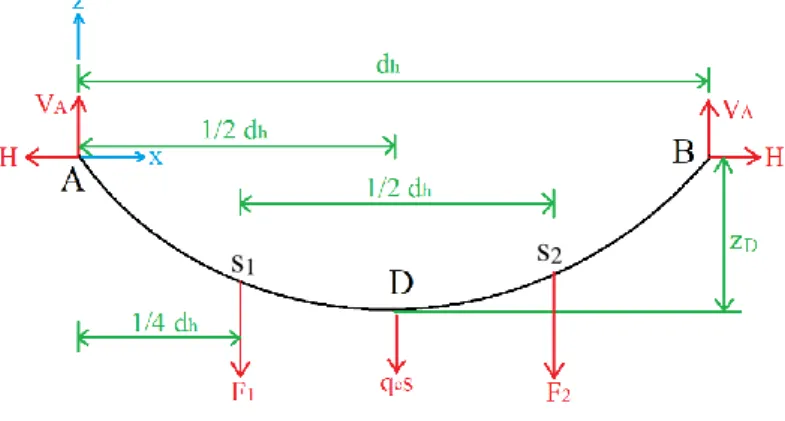
3.2.3.1. Perhitungan Tegangan Kabel Dengan Satu Beban Sesuai dengan data kabel yang telah diperoleh, kemudian dengan mengasumsikan bahwa panjang kabel (L0) sama dengan jarak antar tiang penyangga (dh), nilai modulus Young (E) sama dengan 2 × 1011 Pa dan defleksi maksimal (zD) yang diinginkan adalah -0,3 m, maka dapat dilakukan perhitungan tegangan yang dibutuhkan kabel sesuai kondisi yang diinginkan. Gambar 3.2 merupakan free body diagram kabel dengan satu beban.
Gambar 3.2 Free Body Diagram Kabel Dengan Satu Beban
sD
Pertama, hitung nilai tegangan kabel pada arah vertikal (VA).
Karena posisi kedua tiang penyangga berada pada level yang sama, maka perhitungan dapat dilakukan dengan menggunakan rumus 2.29.
𝑉𝐴=1
2(𝑞𝑐 . 𝐿0+ 𝐹) =1
2(1,57 . 50 + 981) = 529,75 𝑁 Selanjutnya menghitung tegangan kabel pada arah horizontal (H) dengan menggunakan rumus 2.16. Dimana panjang kabel dari titik A ke titik D (sD) sama dengan setengah dari panjang kabel (L0).
𝑧𝐷= 𝑧𝐴+ 1 𝐸𝐴0(𝑞𝑐
2 𝑠𝐷2− 𝑉𝐴𝑠𝐷) + 1
𝑞𝑐(√𝐻2+ (𝑞𝑐𝑠𝐷− 𝑉𝐴)2− √𝐻2+ 𝑉𝐴2)
Dimana nilai A0 = ¼ . π . d2 = ¼ . π . (16)2 = 201,06 mm2 ≈ 2×10‾⁴ m2. Sehingga,
−0,3 = 0 + 1
200 × 〖10)9 . 2 × 10‾4(1,572 〖25)2− 529,75 . 25) +
1
1,57(√𝐻2+ (1,47 . 25 − 529,75)2− √𝐻2+ 〖529,75)2)
−0,3 = −3,18828125 × 10‾4+ 1
1,57(√𝐻2+(−490,5)2−
√𝐻2+ 529,752)
−0,470499439 = √𝐻2+ (−490,5)2− √𝐻2+ 529,752 𝐻 = ±42552,58 𝑁
Setelah mendapat besar nilai tegangan kabel pada arah vertikal dan horizontal, maka dapat dihitung besar tegangan yang terjadi pada kabel dengan menggunakan rumus 2.6.
𝑇𝐷= √𝐻2+ (𝑞𝑐𝑠𝐷− 𝑉𝐴)2
𝑇𝐷= √42552,582+ (1,57 . 25 − 529,75)2 𝑇𝐷= 42555,41 𝑁
25
3.2.3.2. Perhitungan Tegangan Pada Kabel Dengan Dua Beban
Gambar 3.3 Free Body Diagram Kabel Dengan Dua Beban Sama dengan perhitungan sebelumnya, pertama-tama hitung nilai tegangan kabel pada arah vertikal (VA). Karena posisi kedua tiang penyangga berada pada level yang sama, maka perhitungan dapat dilakukan dengan menggunakan rumus 2.29 𝑉𝐴=1
2(𝑞𝑐 . 𝐿0+ 𝐹1+ 𝐹2) =1
2(1,57 . 50 + 981 + 981) = 1020,25 𝑁 Selanjutnya menghitung tegangan kabel pada arah horizontal (H) dengan menggunakan rumus 2.27. Dimana panjang kabel dari titik A ke titik D (sD) sama dengan setengah dari panjang kabel (L0)., panjang kabel (L0) sama dengan jarak antar tiang penyangga (dh), nilai modulus Young (E) sama dengan 2 × 1011 Pa dan defleksi maksimal pada F1 (z1) yang diinginkan adalah -0,3 m.
𝑧 = 𝑧𝐴+𝐸𝐴1
0(𝑞2𝑐𝑠2− 𝑉𝐴𝑠 + 𝐹1𝑠 − 𝐹1𝑠1) + 1
𝑞𝑐(√𝐻2+ (𝑞𝑐s − 𝑉𝐴+ 𝐹1)2− √𝐻2+ (𝑞𝑐𝑠1− 𝑉𝐴+ 𝐹1)2+
√𝐻2+ (𝑞𝑐𝑠1− 𝑉𝐴)2− √𝐻2+ 𝑉𝐴2)
s
1s
2−0,3 = 0 + 1
200 × 〖10)9 . 2 × 10‾4(1,57
2 252− 1020,25 . 25 + 981 . 25 − 981 . 12,5) +
1
1,57(√𝐻2+ (1,57 . 25 − 1020,25 + 981)2−
√𝐻2+ (1,57 . 12,5 − 1020,25 + 981)2+
√𝐻2+ (1,57 . 12,5 − 1020,25)2− √𝐻2+ 1020,252)
−0,4704 = 𝐻 − √𝐻2+ (−19,625)2+
√𝐻2+ (−1000,625)2− √𝐻2+ 1020,252 𝐻 = ±42558,32 𝑁
Setelah mendapat besar nilai tegangan kabel pada arah vertikal dan horizontal, maka dapat dihitung besar tegangan yang terjadi pada kabel dengan menggunakan rumus 2.21.
𝑇𝐷= √𝐻2+ (𝑞𝑐𝑠𝐷− 𝑉𝐴+ 𝐹1)2
𝑇𝐷= √42558,32 2+ (1,57 . 25 − 1020,25 + 981)2 𝑇𝐷= 42558,32 𝑁
3.2.4. Simulasi Pada Software SAP2000
Simulasi pada software SAP2000 dilakukan dalam tiga kondisi, yaitu kondisi nendatar, menanjak, dan menurun. Untuk melakukan simulasi pada software SAP2000 terdapat dua tahapan, yaitu :
1. Persiapan
Pada tahap ini, pertama kali yang dilakukan adalah penentuan unit yang akan digunakan. Daftar unit yang bisa digunakan dapat dilihat pada bagian kanan bawah dari jendela software SAP2000. Pada simulasi kali ini, penulis akan menggunakan unit N, m, C. Selanjutnya membuat grid dengan cara klik kanan pada jendela tampilan, lalu pilih
27
“Edit Grid Data”. Masukan jarak antar grid sesuai dengan yang akan dibutuhkan pada tahap pemodelan.
Sebelum memulai pemodelan, perlu dilakukan pemilihan material yang akan digunakan dan memasukan data diameter kabel. Penentuan material dilakukan dengan cara klik “Define” pada menu bar, kemudian pilih
“Material”. Setelah memilih jenis material yang akan digunakan, selanjutnya masukan data properti material seperti dapat dilihat pada gambar 3.4. Untuk memasukkan diameter kabel, pilih “Define” lalu pilih Section Properties kemudian pilih Cable Sections. Lalu masukkan diameter kabel pada kotak yang disediakan.
Gambar 3.4 Tampilan Material Property Data
2. Pemodelan
Penggambaran model dilakukan dengan cara klik
“Draw” pada menu bar, lalu pilih “Draw Frame/Cable/Tendon”. Sebelum memulai menggambar pada grid yang telah dibuat, pastikan “Line Object Type”
menampilkan “cable”. Setelah menggambar kabel, klik ujung kabel lalu tentukan jenis penumpu dengan cara klik
“Assign”, kemudian pada “Joint”, pilih “Restrains”.
Selanjutnya, masukkan beban sesuai jarak yang ditentukan dengan cara klik pada grid untuk beban, kemudian klik
“Assign” pada menu bar, lalu pada “Joint Loads” pilih
“Force”, selanjutnya masukan besar nilai beban sesuai arah beban.
Gambar 3.5 Pemodelan Kabel Mendatar
Gambar 3.6 Pemodelan Kabel Menanjak
29
Gambar 3.7 Pemodelan Kabel Menurun
Contoh pemodelan kondisi mendatar, menanjak dan menurun dengan satu beban dapat dilihat pada gambar 3.5, 3.6, dan 3.7. Setelah selesai, lakukan proses running dengan cara klik “Analyze” pada menu bar, lalu pilih “Run Analysis”. Jika pada perhitungan manual, dengan menentukan besar defleksi yang diinginkan digunakan untuk menghitung tegangan pada kabel, pada simulasi ini dilakukan sebaliknya. Dilakukan running berulang dengan memasukan besar nilai tegangan horizontal pada kabel untuk mendapatkan besar nilai defleksi yang terjadi pada kabel.
3.2.5. Verifikasi Perhitungan Manual dan Simulasi
Verifikasi mengacu pada hasil perhitungan manual dan simulasi pada kondisi mendatar. Apakah hasil dari simulasi software dapat dikomparasikan dengan hasil dari perhitungan manual. Apabila kedua hasil tersebut dapat dikomparasikan, maka dapat dilakukan simulasi lebih lanjut dengan kondisi menanjak, menurun dan menurun.