Penerapan
Matematika
Pada Bidang
Teknologi Informasi
1. APLIKASI INTEGRAL DAN TURUNAN PADA SISTEM KONTROLER PID 2. PENGGUNAAN TURUNAN PADA SISTEM RAY TRACING 3. APLIKASI LIMIT DAN INTEGRAL PADA KONSEP KECERDASAN BUATAN DIPERSIAPKAN OLEH YANWAR PURNAMA NIM : 311610746 KELAS : TI.16.E.1 DOSENAgus Suwarno, S.Kom.,M.T. MATA KULIAH
DISCLAIMER
SELURUH ISI TULISAN DALAM PAPER INI BERASAL DARI BERBAGAI SUMBER BAIK BUKU MAUPUN MEDIA ONLINE. PENYUSUN TIDAK MELAKUKAN UJI KEBENARAN TERHADAP SEMUA ISI TULISAN. KESALAHAN PEMBUKTIAN MUNGKIN TERJADI DAN PENYUSUN TIDAK DAPAT MEMPERTANGGUNG JAWABKAN.PENDAHULUAN
Perkembangan teknologi bergerak sangat pesat, reinkarnasi hardware dan software dari waktu ke waktu berubah dengan cepat. Berbagai metode baru dalam pemrograman maupun algoritma pada sistem hardware telah banyak berubah, semakin canggih dan semakin modern. Matematika menjadi peranan penting dalam perkembangan tersebut. Dalam bidang kalkulus logika fuzzy telah membantah logika klasik lama, boolean. Sehingga aplikasi teknologi berkembang dengan pendekatan logika bagaimana manusia bisa berpikir dan belajar. Dampak perkembangan teknologi hardware yang performance-nya semakin tinggi dan semakin berukuran kecil serta di dukung oleh teknologi software yang semakin pintar, dapat memunculkan berbagai produk dari Artificial Intelegence (AI) dan bersahabat untuk di gunakan dalam kehidupan sehari-hari. Di masa mendatang, AI ditantang untuk menjawab pertanyaan berikut: Mampukan suatu kecerdasan membuat kecerdasan yang lebih cerdas dari dirinya sendiri?. Ray Kurzweil dalam bukunya “The age of spiritual Machine. When Computers Exceed Human Intelegence” memprediksi bahwa hal itu mungkin terwujud melalui beberapa tahapan prediksi yang di buatnya secara bertahap sampai dengan sekitar tahun 2099. Papper ini di susun dalam rangka memenuhi tugas mata kuliah Matematika Terapan II dengan dosen pengampu Agus Suwarno, S.Kom., M.T., Saya ucapkan terima kasih yang tak terhingga kepada beliau untuk semua bimbingan dan arahannya. Akhir kata, penyusun berharap semua isi tulisan ini bisa berguna bagi semua pembaca. Sehingga bisa menciptakan kebanggan bagi Indonesia, negara kita tercinta. Cibitung, 8 Agustus 2017 Penyusun – Yanwar PurnamaDAFTAR ISI
PENDAHULUAN ... 3 APLIKASI INTEGRAL DAN TURUNAN PADA SISTEM KONTROLER PID ... 5 A. TEORI KONTROLER PID ... 6 Term proporsional ... 7 Term Integral ... 8 Turunan Derivatif ... 9B. CONTOH LOOP CONTROL ... 10
Proporsional ... 11 Integral ... 11 Derivative ... 11 Kontrol redaman ... 12 C. RESPON TERHADAP GANGGUAN ... 12 D. PI CONTROLLER ... 13 PENGGUNAAN TURUNAN PADA SISTEM RAY TRACING ... 15
A. METODE RAY TRACING ... 15
FORWARD RAY TRACING ... 16 BACKWARD RAY TRACING ... 16 APLIKASI LIMIT DAN INTEGRAL PADA KONSEP KECERDASAN BUATAN ... 20 A. LOGIKA FUZZY ... 20 ALASAN DIGUNAKANNYA LOGIKA FUZZY ... 22 APLIKASI ... 22 B. HIMPUNAN FUZZY ... 23 Konsep Dasar [1] ... 23 Konsep Dasar [2] ... 24 Konsep Dasar [3] ... 24 Konsep Dasar [4] ... 25 Konsep Dasar [5] ... 25 Konsep Dasar [6] ... 25 Konsep Dasar [7] ... 26 Konsep Dasar [8] ... 26 Konsep Dasar [9] ... 26 Konsep Dasar [10] ... 27
C. BLOK DIAGRAM FUZZY LOGIC CONTROL ... 27
Fuzzification ... 27 Fuzzy Membership ... 28 Fuzzy Membership Operation ... 29 Fuzzy Set Membership Function ... 30 Fuzzy IF-Then Rule ... 32 Fuzzy Reasoning ... 33
D. PERATURAN BERBASIS SISTEM (RULE-BASED SYSTEMS) ... 36
Aplikasi ... 36
Konstruksi ... 36
APLIKASI INTEGRAL DAN TURUNAN PADA SISTEM KONTROLER PID
Kontroler PID atau dalam bahasa inggris PID Controler (Proportional–Integral–Derivative controller) merupakan kontroler mekanisme umpan balik yang biasanya dipakai pada sistem kontrol industri. Sebuah kontroler PID secara kontinyu menghitung nilai kesalahan sebagai beda antara setpoint yang diinginkan dan variabel proses terukur.
PID merupakan mekanisme umpan balik atau loop kontrol yang banyak digunakan dalam sistem kontrol industri dan berbagai aplikasi lain yang memerlukan kontrol termodulasi secara terus menerus. Pengontrol PID terus menghitung nilai kesalahan e(t) Sebagai perbedaan antara setpoint yang diinginkan dan variabel proses yang diukur dan menerapkan koreksi berdasarkan istilah proporsional , integral, dan derivatif (dilambangkan P , I , dan D) yang memberi nama mereka ke tipe controller.
Secara praktis, otomatis menerapkan koreksi yang akurat dan responsif terhadap fungsi kontrol. Contoh sehari-hari adalah cruise control pada modern. Dimana pengaruh eksternal seperti gradien menyebabkan perubahan kecepatan, dan pengemudi juga dapat mengubah kecepatan yang diinginkan. Algoritma PID mengembalikan kecepatan aktual ke kecepatan yang diinginkan dengan cara optimal, tanpa penundaan atau overshoot, dengan mengubah output daya dari mesin kendaraan.
Analisis teoretis dan aplikasi praktis pertama ada di bidang sistem kemudi otomatis untuk kapal, yang dikembangkan mulai awal 1920an dan seterusnya. Kemudian digunakan untuk pengendalian proses otomatis di industri manufaktur, di mana ia diterapkan secara luas di pneumatik, dan kemudian pengendali elektronik. Saat ini ada penggunaan konsep PID secara universal dalam aplikasi yang memerlukan kontrol otomatis yang akurat dan optimal.
Kontroler mencoba untuk meminimalkan nilai kesalahan setiap waktu dengan penyetelan variabel kontrol, seperti posisi keran kontrol, damper, atau daya pada elemen pemanas, ke nilai baru yang ditentukan oleh jumlahan: dengan Kp, Ki,Kd, semuanya positif, menandakan koefisien untuk term proporsional, integral, dan derivatif, secara berurutan (atau P, I, dan D). Pada model ini, • P bertanggung jawab untuk nilai kesalahan saat ini. Contohnya, jika nilai kesalahan besar dan positif, maka keluaran kontrol juga besar dan positif. • I bertanggung jawab untuk nilai kesalahan sebelumnya. Contoh, jika keluaran saat ini kurang besar, maka kesalahan akan terakumulasi terus menerus, dan kontroler akan merespon dengan keluaran lebih tinggi.
• D bertanggung jawab untuk kemungkinan nilai kesalahan mendatang, berdasarkan pada rate perubahan tiap waktu. Gambar 1 - Blok diagram dari kontroler PID Karena kontroler PID hanya mengandalkan variabel proses terukur, bukan pengetahuan mengenai prosesnya, maka dapat secara luas digunakan. Dengan penyesuaian (tuning) ketiga parameter model, kontroler PID dapat memenuhi kebutuhan proses. Respon kontroler dapat dijelaskan dengan bagaimana responnya terhadap kesalahan, besarnya overshoot dari setpoint, dan derajat osilasi sistem. penggunaan algoritma PID tidak menjamin kontrol optimum sistem atau bahkan kestabilannya. Beberapa aplikasi mungkin hanya menggunakan satu atau dua term untuk memberikan kontrol sistem yang sesuai. Hal ini dapat dicapai dengan mengontrol parameter yang lain menjadi nol. Kontroler PID dapat menjadi kontroler PI, PD, P atau I tergantung aksi apa yang digunakan. Kontroler PI biasanya adalah kontroler paling umum. Untuk sistem waktu diskrit, sering digunakan PSD atau proportional-summation-difference.
A. Teori kontroler PID
Skema kontrol PID dinamai dari ketiga term pengendalinya, yang kemudian dijumlahkan menjadi variabel manipulasi. Term proporsional, integral, dan derivatif dijumlahkan untuk menghitung keluaran kontroler PID. Dengan mendefinisikan u(t) sebagai keluaran kontroler, bentuk akhir dari algoritma PID adalah:
dengan :
Kp : Gain proporsional, parameter tuning
Ki : Gain Integral, parameter tuning
Kd : Gain Derivatif, parameter tuning
e : Error = Ysp – Ym Ysp : Setpoint
Ym : Variabel Proses
t : Waktu
t : Variabel integrasi; nilainya diambil dari waktu nol sampai t
Transfer fungsi dalam bentuk Domain Laplace kontroler PID adalah: dengan : s : frekuensi bilangan komplek
Term proporsional
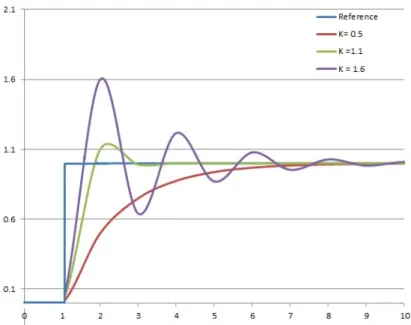
Term proporsional menghasilkan nilai keluaran yang berbanding lurus dengan nilai kesalahan. Responnya dapat diatur dengan mengalikan kesalahan (error) dengan konstanta Kp disebut konstanta gain proporsional atau gain kontroler. Term proporsional dirumuskan:Gambar 2 - Plot Y vs waktu, untuk 3 nilai Kp (Ki dan Kd dijaga konstan)
Term Integral
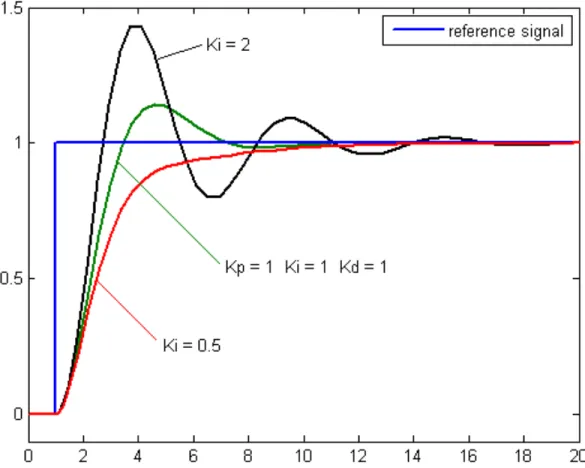
Peranan dari term integral berbanding lurus dengan besar dan lamanya error. Integral dalam kontroler PID adalah jumlahan error setiap waktu dan mengakumulasi offset yang sebelumnya telah dikoreksi. Error terakumulasi dikalikan dengan gain integral (Ki) dan menjadi keluaran kontroler. Term integral dirumuskan dengan: Term integral mempercepat perpindahan proses menuju setpoint dan menghilangkan steady-state error yang muncul pada kontroler proporsional. Namun, karena integral merespon terhadap error terakumulasi dari sebelumnya, maka dapat menyebabkan overshoot.Gambar 3 - Plot Y vs waktu, untuk 3 nilai Ki (Kp dan Kd dijaga konstan)
Turunan Derivatif
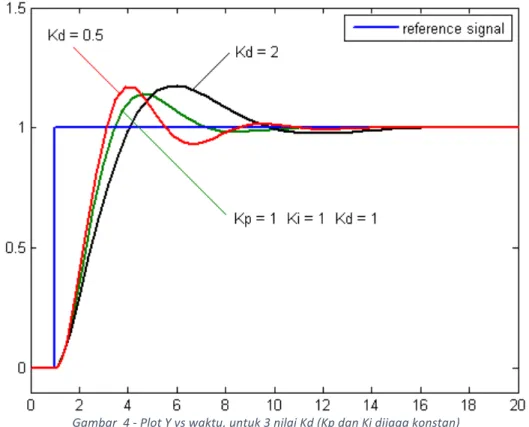
Turunan error pada proses dihitung dengan menentukan kemiringan error setiap waktu dan mengalikan perubahan tiap waktu dengan gain derivatif Kd. Term derivatif dirumuskan dengan: Aksi derivatif memprediksi perilaku sistem dan kemudian memperbaiki waktu tinggal dan stabilitas sistem. Aksi derivatif jarang digunakan pada industri - diperkirakan hanya 25% kontroler- karena akibatnya pada stabilitas sistem pada aplikasi dunia nyata.
Gambar 4 - Plot Y vs waktu, untuk 3 nilai Kd (Kp dan Ki dijaga konstan)
B. CONTOH LOOP CONTROL
Mari ambil contoh lengan robot, yang bisa dipindahkan dan diposisikan oleh loop kontrol. Motor listrik dapat mengangkat atau menurunkan lengan, tergantung pada daya maju atau mundur yang diterapkan, namun daya tidak dapat berfungsi secara sederhana karena massa momen inersia lengan, gaya akibat gravitasi, kekuatan eksternal pada lengan seperti beban Untuk mengangkat atau bekerja yang harus dilakukan pada benda eksternal. • Posisi yang dirasakan adalah variabel proses (PV). • Posisi yang diinginkan disebut setpoint (SP). • Perbedaan antara PV dan SP adalah error (e), yang mengkuantifikasi apakah lengan terlalu rendah atau terlalu tinggi dan seberapa banyak. • Masukan ke proses ( arus listrik di motor) adalah output dari pengendali PID. Hal ini disebut variabel manipulasi (MV) atau variabel kontrol (CV).
Dengan mengukur posisi (PV), dan mengurangkannya dari titik setel (SP), kesalahan (e)
ditemukan, dan dari situ pengendali menghitung berapa banyak arus listrik yang dipasok ke motor (MV).
Proporsional
Metode yang jelas adalah kontrol proporsional : arus motor diatur sebanding dengan kesalahan yang ada. Namun, metode ini gagal jika, misalnya, lengan harus mengangkat beban yang berbeda: berat yang lebih besar membutuhkan gaya yang lebih besar yang diterapkan untuk kesalahan yang sama pada sisi bawah, namun gaya yang lebih kecil jika kesalahan berada pada sisi atas. Di situlah istilah integral dan turunan memainkan peran mereka.Integral
Istilah integral meningkatkan tindakan dalam hubungannya tidak hanya dengan kesalahan tetapi juga waktu yang telah berlangsung. Jadi, jika kekuatan yang diterapkan tidak cukup untuk membawa kesalahan ke nol, kekuatan ini akan meningkat seiring berjalannya waktu. Pengontrol "I" murni bisa membawa kesalahan ke titik nol, namun akan bereaksi lambat pada awalnya (karena tindakan akan kecil di awal, memerlukan waktu untuk mendapatkan signifikan), brutal (tindakan meningkat selama Kesalahannya positif, kalaupun kesalahan sudah mulai mendekati nol), dan lambat ke akhir (saat sisi error switch, ini untuk beberapa waktu hanya akan mengurangi kekuatan aksinya dari "I"), Mendorong overshoot dan osilasi (lihat di bawah). Selain itu, bahkan bisa memindahkan sistem dari nol kesalahan: mengingat bahwa sistem telah salah, itu bisa memicu tindakan bila tidak dibutuhkan. Formulasi alternatif tindakan integral adalah mengubah arus listrik dalam langkah-langkah kecil yang persisten yang sesuai dengan kesalahan saat ini. Seiring waktu, langkah-langkahnya terakumulasi dan bertambah bergantung pada kesalahan masa lalu; Ini adalah waktu diskrit yang setara dengan integrasi.Derivative
Istilah turunan tidak mempertimbangkan kesalahan (artinya tidak dapat membawanya ke titik nol: pengendali D murni tidak dapat membawa sistem ke titik setelnya), namun tingkat perubahan kesalahan, yang mencoba membuat angka ini menjadi nol. Ini bertujuan untuk meratakan lintasan kesalahan menjadi garis horizontal, mengurangi kekuatan yang diterapkan, sehingga mengurangi overshot (kesalahan di sisi lain karena terlalu banyak gaya yang digunakan). Menerapkan terlalu banyak dorongan saat kesalahan kecil dan mengurangi akan menyebabkan overshoot. Setelah overshooting, jika pengontrol menerapkan koreksi besar pada arah yang berlawanan dan berulang kali melampaui posisi yang diinginkan, output akan berosilasi di sekitar titik setel baik sinus konstan, tumbuh, atau membusuk. Jika amplitudo osilasi meningkat seiring waktu, sistem tidak stabil. Jika menurun, sistemnya stabil. Jika osilasi tetap pada besaran konstan, sistemnya sedikit stabil .Kontrol redaman
Demi mencapai tujuan yang terkontrol pada posisi yang diinginkan (SP) secara tepat waktu dan akurat, sistem yang dikendalikan perlu diredam secara kritis . Sistem kontrol posisi yang disetel dengan baik juga akan menerapkan arus yang diperlukan ke motor yang dikontrol sehingga lengan mendorong dan menarik seperlunya untuk menahan kekuatan eksternal yang mencoba memindahkannya dari posisi yang diinginkan. Setpoint itu sendiri dapat dihasilkan oleh sistem eksternal, seperti PLC atau sistem komputer lainnya, sehingga secara terus menerus bervariasi tergantung pada pekerjaan yang diharapkan oleh lengan robot. Sistem kontrol PID yang disetel dengan baik memungkinkan lengan untuk memenuhi persyaratan yang berubah ini sebaik kemampuannya.C. Respon terhadap gangguan
Jika pengendali dimulai dari keadaan stabil dengan nol kesalahan (PV = SP), maka perubahan lebih lanjut oleh pengontrol akan menjadi respons terhadap perubahan input terukur atau tidak terukur lainnya terhadap proses yang mempengaruhi proses, dan karenanya PV. Variabel yang mempengaruhi proses selain MV dikenal sebagai gangguan. Umumnya pengendali digunakan untuk menolak gangguan dan menerapkan setpoint changes. Perubahan beban pada lengan merupakan gangguan pada proses pengendali lengan robot. Aplikasi Secara teori, pengendali dapat digunakan untuk mengendalikan setiap proses yang memiliki keluaran terukur (PV), nilai ideal yang diketahui untuk keluaran tersebut (SP) dan masukan untuk
proses (MV) yang akan mempengaruhi PV yang bersangkutan. Pengendali digunakan di industri
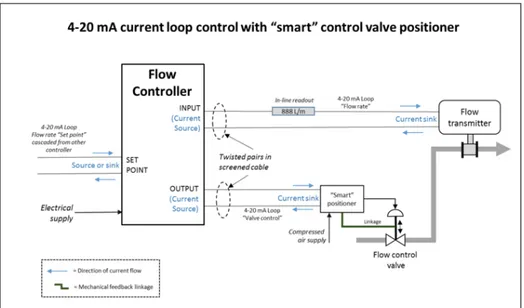
untuk mengatur suhu , tekanan , gaya , laju umpan , laju alir , komposisi kimia ( konsentrasi komponen), berat , posisi , kecepatan , dan hampir setiap variabel lain yang pengukurannya ada.
Gambar 5 - Contoh Loop Kontrol
D. PI CONTROLLER
Pengontrol PI (pengendali integral proporsional) adalah kasus khusus pengendali PID dimana turunan (D) kesalahan tidak digunakan. Output pengontrol diberikan olehdimana D Adalah kesalahan atau penyimpangan nilai aktual yang diukur ( PV ) dari setpoint (
SP ). Pengontrol PI dapat dimodelkan dengan mudah di perangkat lunak seperti Simulink atau Xcos menggunakan kotak "flow chart" yang melibatkan operator Laplace : IMPLEMENTASI DISKRIT
Analisis untuk merancang implementasi digital pengendali PID di perangkat mikrokontroler (MCU) atau FPGA memerlukan bentuk standar pengontrol PID untuk diskretisasi . Perkiraan untuk derivatif orde pertama dibuat dengan perbedaan terbatas . Istilah integral didiskritkan, dengan waktu sampling Δ t, sebagai berikut,
Istilah turunan mendekati persamaan sebagai, Dengan demikian, algoritma kecepatan untuk implementasi kontroler PID diskrit pada MCU diperoleh dengan membedakan Ut, Dengan menggunakan definisi numerik turunan dan pemecahan pertama dan kedua untuk Kamu u(tk) dan akhirnya mendapatkan: Berikut adalah contoh pseudocode pada aplikasi loop controler previous_error = 0 integral = 0 loop:
error = setpoint - measured_value integral = integral + error*dt
derivative = (error - previous_error)/dt
output = Kp*error + Ki*integral + Kd*derivative previous_error = error
wait(dt) goto loop
PENGGUNAAN TURUNAN PADA SISTEM RAY TRACING
Ray tracing adalah salah satu dari banyak teknik yang ada untuk membuat gambar dengan komputer. Ide dibalik ray tracing adalah bahwa gambar yang benar secara fisik tersusun oleh cahaya dan cahaya biasanya akan berasal dari sumber cahaya dan pantulan sekitar akan berasal dari sumber cahaya dan pantulan sekitar sebagai sinar cahaya (mengikuti jalur garis terputus) dalam adegan sebelum tertangkap mata kita atau kamera. Kemampuan mereproduksi dalam simulasi komputer jalan yang diikuti dari sumber cahaya ke mata kita, kita kemudian akan dapat menentukan apa yang mata kita lihat.
Gagasan kedua adalah bahwa gambar yang kita hasilkan biasanya berupa grid pixel dengan resolusi terbatas. Ray Tracing adalah metode untuk menghitung jalan gelombang atau partikel melalui suatu sistem. Ray Tracing atau yang dikenal dengan Ray Casting, menjelaskan hal yang terlihat dari permukaan dengan mengikuti gambaran cahaya dari sinar yang berasal dari penglihatan mata kita terhadap objek di layar. Ray Tracing adalah teknik rendering grafik tiga dimensi denganinteraksi sinar yang tiga dimensi dengan interaksi sinar yang kompleks. Ray tracing dilakukan dalam dua bentuk yang berbeda : 1. Ray Tracing (physics), yang digunakan untuk menganalisis sistem optik. 2. Ray Tracing (graphics), yang digunakan untuk generasi gambar 3D untuk generasi gambar 3D.
Dalam grafik komputer, ray tracing adalah teknik untuk menghasilkan sebuah gambar teknik untuk menghasilkan sebuah gambar dengan menelusuri jalan cahaya melalui pixel dalam gambar Teknik ini mampu dalam gambar. Teknik ini mampu menghasilkan tingkat ketajaman gambar yang sangat tinggi biasanya lebih tinggi dari yang sangat tinggi –biasanya lebih tinggi dari pada metode tipe scanline rendering, tetapi biaya komputasi lebih besar. Hal ini membuat ray tracing paling cocok untuk aplikasi di mana gambar dapat di-render perlahan terlebih dahulu, seperti pada gambar diam dan film dan special effects televisi,dan p, kurang lebih cocok untuk real-time aplikasi seperti game komputer,dimana kecepatan sangat penting. Ray tracing mampu mensimulasikan berbagai efek optis, seperti refleksi dan pembiasan penyebaran dan aberasi kromatik.
A. METODE RAY TRACING
Terdapat 2 metode pada Ray Tracing yaitu:
1. Forward Ray Tracing
Metode ini memperhitungkan semua sinar yang dipancarkan oleh sumber cahaya baik yang dipancarkan oleh sumber cahaya, baik yang mengenai mata ataupun tidak.
Cara kerja dari metode ini adalah dengan menelusuri sinar yang mengenai mata ditelusuri kembali ke sumber cahaya.
FORWARD RAY TRACING
Metode ini memperhitungkan keakuratan penghitungan warna, namun menjadi tidak efektif karena jumlah sinar yang dipancarkan oleh suatu sumber cahaya sangat banyak (bisa mencapai jutaan sinar), dan jika sinar tidak mengenai mata maka sinar tersebut akan tidak diperhitungkan meski telah dihitung sebelumnya. Hal ini akan menimbulkan banyak penghitungan sia-sia karena banyaknya sinar yang tidak diperhitungkan kemudian. Kelebihan dari metode ini adalah dapat memperoleh jumlah sinar yang lebih banyak daripada metode backward ray tracing. Gambar 6 - Forward Ray Tracing
Pada gambar di atas tampak bahwa penelusuran sinar dilakukan mulai dari sumber cahaya (dalam hal di atas adalah lampu) menuju ke mata,sehingga semua sinar yangberasal dari lampu harus diperhitungkan. Metode penelusuran dari sumber cahaya menuju ke mata inilah yang kemudian dinamakan metode forward raytracing. (Dari sumber diteruskan menuju ke tujuan).
BACKWARD RAY TRACING
Sinar yang mengenai mata tersebut akan ditelusuri menuju ke layar penggambaran dengan memperhitungkan nilai dari objek-objek yang ada pada penggambaran sehingga didapatkan apakah sinar tersebut mengenai objek yang ada Proses penelusuran tersebut mengenai objek yang ada. Proses penelusuran ini dilakukan untuk setiap pixel dari ukuran layar penggambaran. (Hal ini menyebabkan semakin besar ukuran layar penggambaran maka semakin lama proses perhitungan yang dilakukan, dan demikian pula sebaliknya).
pencahayaan yang mengenai benda tersebut. Jika sinar tidak mengenai benda maka nilai pixel akan diset menjadi warna background (default warna background adalah warna hitam).
Hal yang perlu diperhitungkan adalah bila sinar mengenai benda dan terdapat benda lain di belakang benda yang ditabrak maka sinar yang mengenai benda tersebut hanya sinar yang diperhitungkan untuk tabrakan dengan benda pertama (benda terdepan) karena benda pertama (benda terdepan) yang terletak di belakang benda yang lain pasti tidak akan terlihat. Gambar 7 - Backward Ray Tracing Pada gambar diatas tampak bahwa sinar yang berasal dari sumber cahaya terus ke mata dan kemudian dari titik mata sinar tersebut ditelusuri kembali. Dalam contoh kasus di atas, sinar yang ditelusuri kembali ternyata menabrak benda pada posisi u,v pada frame buffer/ layar penggambaran.
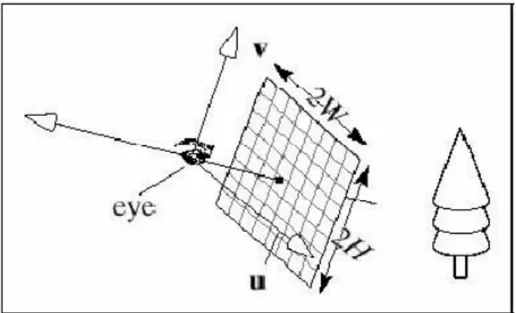
Pada saat menabrak inilah maka nilai pixel padaframe buffer akan dihitung dengan pada frame bufferakan dihitung dengan memperhitungkan semua nilai ambient / diffuse / specular dari semua cahaya yang ada. Halpertama yang harus dilakukan adalah melakukan setting / digunakan untuk penghitungan objek-objek 3 dimensi. Hal tersebut dilakukan dengan mengasumsikan bahwa layar penggambaran memiliki 2 variabel sumbu yaitu u dan v. Sumbu u adalah sumbu ke kanan dan range dari dan v. Sumbu u adalah -W sampai dengan W. Sumbu v adalah sumbu ke atas dan range dari sumbu v adalah –H sampai dengan H.
Gambar 8 - Penentuan Sumbu u dan v
Langkah selanjutnya yang dilakukan adalah penentuan nilai dari W dan H yang sebelumnya diasumsikan sebagai range dari sumbu u dan v tersebut. Penghitungan nila W dan H tampak seperti gambar di bawah ini:
Gambar 9 - Penentuan sumbu W dan H dan transformasinya
Pada gambar di atas (gambar (a)) tampak bahwa mata memiliki sudut pandang yang kita namakan sebagai θ. Sehingga untuk mendapatkan nilai tinggi dari near plane / W maka bisa didapatkan dari rumus matematika yaitu (Hill 1990);)
H =N.Tan(θ/2) (Rumus 1.)
u-v(W=Haspect ratio) Setelah penggambaran / bidang uv. (W H. aspect ratio). Setelah nilai H dan W ditentukan, maka nilai posisi Uc dan Vr, yang bila diturunkan adalah sebagai berikut (Hill 1990): Rumus di atas digunakan untuk menentukan nilai (Uc,Vr) dalam hubungannya dengan W dan H. Hal berikutnya yang dilakukan adalah penentuan persamaan sinar ditelusuri dari mata ke pixel tujuan yang dilakukan dengan menggunakan rumus (Hill 1990): r(t)=eye(1-t) + (eye – Nn+ Ucu+ Vrv)t (Rumus 3.) Eye adalah titik mata (dalam x,y,z), N adalah jarak antara mata dengan bilangan u-v, Uc dan Vr adalah posisi pixel pada bidang uv dan t adalah titik tabrak sinar dengan benda (akan diperhitungkan kemudian). Rumus di atas kemudian disederhanakan menjadi (Hill 1990):
r(t)=eye+dirrc .t, dirrc =-Nn+ Ucu+ Vr (Rumus 4.)
Secara umum, ray tracing dapat dibentuk dari algoritma berikut ini:
APLIKASI LIMIT DAN INTEGRAL PADA KONSEP KECERDASAN
BUATAN
Kecerdasan Buatan atau kecerdasan yang ditambahkan kepada suatu sistem yang bisa diatur dalam konteks ilmiah atau Intelegensi Artifisial (bahasa Inggris: Artificial Intelligence atau hanya disingkat AI) didefinisikan sebagai kecerdasan entitas ilmiah. Sistem seperti ini umumnya dianggap komputer. Kecerdasan diciptakan dan dimasukkan ke dalam suatu mesin (komputer) agar dapat melakukan pekerjaan seperti yang dapat dilakukan manusia. Beberapa macam bidang yang menggunakan kecerdasan buatan antara lain sistem pakar, permainan komputer (games), logika fuzzy, jaringan syaraf tiruan dan robotika. Banyak hal yang kelihatannya sulit untuk kecerdasan manusia, tetapi untuk Informatika relatif tidak bermasalah. Seperti contoh: mentransformasikan persamaan, menyelesaikan persamaan integral, membuat permainan catur atau Backgammon. Di sisi lain, hal yang bagi manusia kelihatannya menuntut sedikit kecerdasan, sampai sekarang masih sulit untuk direalisasikan dalam Informatika. Seperti contoh: Pengenalan Obyek/Muka, bermain sepak bola. Walaupun AI memiliki konotasi fiksi ilmiah yang kuat, AI membentuk cabang yang sangat penting pada ilmu komputer, berhubungan dengan perilaku, pembelajaran dan adaptasi yang cerdas dalam sebuah mesin. Penelitian dalam AI menyangkut pembuatan mesin untuk mengotomatisasikan tugas-tugas yang membutuhkan perilaku cerdas. Termasuk contohnya adalah pengendalian, perencanaan dan penjadwalan, kemampuan untuk menjawab diagnosa dan pertanyaan pelanggan, serta pengenalan tulisan tangan, suara dan wajah. Hal-hal seperti itu telah menjadi disiplin ilmu tersendiri, yang memusatkan perhatian pada penyediaan solusi masalah kehidupan yang nyata. Sistem AI sekarang ini sering digunakan dalam bidang ekonomi, obat-obatan, teknik dan militer, seperti yang telah dibangun dalam beberapa aplikasi perangkat lunak komputer rumah dan video game.A. Logika Fuzzy
Logika Fuzzy adalah peningkatan dari logika Boolean yang berhadapan dengan konsep kebenaran sebagian. Saat logika klasik menyatakan bahwa segala hal dapat diekspresikan dalam istilah biner (0 atau 1, hitam atau putih, ya atau tidak), logika fuzzy menggantikan kebenaran boolean dengan tingkat kebenaran. Logika Fuzzy memungkinkan nilai keanggotaan antara 0 dan 1, tingkat keabuan dan juga hitam dan putih, dan dalam bentuk linguistik, konsep tidak pasti seperti "sedikit", "lumayan", dan "sangat". Logika ini berhubungan dengan set fuzzy dan teori kemungkinan. Logika fuzzyAda beberapa metode untuk merepresentasikan hasil logika fuzzy yaitu metode Tsukamoto, Sugeno dan Mamdani. Pada metode Tsukamoto, setiap konsekuen direpresentasikan dengan himpunan fuzzy dengan fungsi keanggotaan monoton. Output hasil inferensi masing-masing aturan adalah z, berupa himpunan biasa (crisp) yang ditetapkan berdasarkan -predikatnya. Hasil akhir diperoleh dengan menggunakan rata-rata terbobotnya.(Sri Kusumadewi,2002:108) Metode Sugeno mirip dengan metode Mamdani, hanya output (konsekuen) tidak berupa himpunan fuzzy, melainkan berupa konstanta atau persamaan liniar. Ada dua model metode Sugeno yaitu model fuzzy sugeno orde nol dan model fuzzy sugeno orde satu. Bentuk umum model fuzzy sugeno orde nol adalah : IF (x1 is A1) o (x2 is A2) o ….. o (xn is An) THEN z = k Bentuk umum model fuzzy Sugeno orde satu adalah : IF (x1 is A1) o (x2 is A2) o ….. o (xn is An) THEN z = p1.x1 + … pn.xn + q Orang yang belum pernah mengenal logika fuzzy pasti akan mengira bahwa logika fuzzy adalah sesuatu yang amat rumit dan tidak menyenangkan. Namun, sekali seseorang mulai mengenalnya, ia pasti akan sangat tertarik dan akan menjadi pendatang baru untuk ikut serta mempelajari logika fuzzy. Logika fuzzy dikatakan sebagai logika baru yang lama, sebab ilmu tentang logika fuzzy modern dan metodis baru ditemukan beberapa tahun yang lalu, padahal sebenarnya konsep tentang logika fuzzy itu sendiri sudah ada pada diri kita sejak lama. Logika fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang input ke dalam suatu ruang output. Sebagai contoh: 1. Manajer pergudangan mengatakan pada manajer produksi seberapa banyak persediaan barang pada akhir minggu ini, kemudian manajer produksi akan menetapkan jumlah barang yang harus diproduksi esok hari. 2. Pelayan restoran memberikan pelayanan terhadap tamu, kemudian tamu akan memberikan tip yang sesuai atas baik tidaknya pelayan yang diberikan; 3. Anda mengatakan pada saya seberapa sejuk ruangan yang anda inginkan, saya akan mengatur putaran kipas yang ada pada ruangan ini. 4. Penumpang taksi berkata pada sopir taksi seberapa cepat laju kendaraan yang diinginkan, sopir taksi akan mengatur pijakan gas taksinya. Salah satu contoh pemetaan suatu input-output dalam bentuk grafis seperti terlihat pada Gambar berikut.
Antara input dan output terdapat satu kotak hitam yang harus memetakan input ke output yang sesuai.
ALASAN DIGUNAKANNYA LOGIKA FUZZY
Ada beberapa alasan mengapa orang menggunakan logika fuzzy, antara lain: Konsep logika fuzzy mudah dimengerti. Konsep matematis yang mendasari penalaran fuzzy sangat sederhana dan mudah dimengerti. 1. Logika fuzzy sangat fleksibel. 2. Logika fuzzy memiliki toleransi terhadap data-data yang tidak tepat. 3. Logika fuzzy mampu memodelkan fungsi-fungsi nonlinear yang sangat kompleks. 4. Logika fuzzy dapat membangun dan mengaplikasikan pengalaman- pengalaman para pakar secara langsung tanpa harus melalui proses pelatihan. 5. Logika fuzzy dapat bekerjasama dengan teknik-teknik kendali secara konvensional. 6. Logika fuzzy didasarkan pada bahasa alami.
APLIKASI
Beberapa aplikasi logika fuzzy, antara lain: 1. Pada tahun 1990 pertama kali dibuat mesin cuci dengan logika fuzzy di Jepang (Matsushita Electric Industrial Company). Sistem fuzzy digunakan untuk menentukan putaran yang tepat secara otomatis berdasarkan jenis dan banyaknya kotoran serta jumlah yang akan dicuci. Input yang digunakan adalah: seberapa kotor, jenis kotoran, dan banyaknya yang dicuci. Mesin ini menggunakan sensor optik , mengeluarkan cahayamaka sinar yang sampai makin redup. Disamping itu, sistem juga dapat menentukan jenis kotoran (daki atau minyak). 2. Transmisi otomatis pada mobil. Mobil Nissan telah menggunakan sistem fuzzy pada transmisi otomatis, dan mampu menghemat bensin 12 – 17%. 3. Kereta bawah tanah Sendai mengontrol pemberhentian otomatis pada area tertentu. 4. Ilmu kedokteran dan biologi, seperti sistem diagnosis yang didasarkan pada logika fuzzy, penelitian kanker, manipulasi peralatan prostetik yang didasarkan pada logika fuzzy, dll. 5. Manajemen dan pengambilan keputusan, seperti manajemen basisdata yang didasarkan pada logika fuzzy, tata letak pabrik yang didasarkan pada logika fuzzy, sistem pembuat keputusan di militer yang didasarkan pada logika fuzzy, pembuatan games yang didasarkan pada logika fuzzy, dll. 6. Ekonomi, seperti pemodelan fuzzy pada sistem pemasaran yang kompleks, dll. 7. Klasifikasidanpencocokanpola. 8. Psikologi, seperti logika fuzzy untuk menganalisis kelakuan masyarakat, pencegahan dan investigasi kriminal, dll. 9. Ilmu-ilmusosial,terutama untuk pemodelan informasi yang tidak pasti. 10. Ilmu lingkungan, seperti kendali kualitas air, prediksi cuaca, dll. 11. Teknik, seperti perancangan jaringan komputer, prediksi adanya gempa bumi, dll. 12. Riset operasi, seperti penjadwalan dan pemodelan, pengalokasian, dll. 13. Peningkatan kepercayaan, seperti kegagalan diagnosis, inspeksi dan monitoring produksi.
B. HIMPUNAN FUZZY
Pada himpunan tegas (crisp), nilai keanggotaan suatu item x dalam suatu himpunan A, yang sering ditulis dengan μA[x], memiliki 2 kemungkinan, yaitu: • satu (1), yang berarti bahwa suatu item menjadi anggota dalam suatu himpunan, atau • nol (0), yang berarti bahwa suatu item tidak menjadi anggota dalam suatu himpunan.Konsep Dasar [1]
• Teori klasik, himpunan = kumpulan elemen yang berhingga/tak-berhingga milik dari suatu himpunantertentu yg disbt semesta pembicaraan • Elemen dr semesta pembicaraan dapat termasuk atau tidak termasuk ke dalam himpunan A
Konsep Dasar [2]
Fungsi karakteristik yg bersifat Boolean/crisp atau tegas adalah fungsi tak-kontinu: Sifat samar atau vagueness dpt dimasukkan ke dalam teori himpunan dgn membuat fungsi karakteristik boleh bernilai tidak berhingga banyaknya di antara nilai 0 dan nilai 1 Semesta pembicaraan X dgn elemen x:Konsep Dasar [3]
• Himp fuzzy A dlm semesta pembicaraan X adl himp pasangan berurutan (kontinu & diskrit): Fungsi keanggotaan µ A(x) adl pemetaan dari semesta pembicaraan ke rentang tertutup [0, 1]:Fungsi keanggotaan = ukuran sejauh mana elemen x termasuk ke dalam himpunan A
Konsep Dasar [4]
• Himp support A adalah himp bagian dr semesta pembicaraan X dengan µA(x) > 0 • Contoh: Suhu air di titik tertentu dlm plant µ A Suhu dinyatakan sbg bil bulat positif dlm [0, 100] Variabel fuzzy Low dipakai utk definisi • Himp ini menyatakan sejauh mana suhu dianggap rendah/Low terhadap seluruh nilai yang mungkin Fungsi keanggotaan mA(x) memiliki nilai2 diskrit dlm satuan °C yg dinyatakan dgn himpunan:Konsep Dasar [5]
Atau secara lebih ringkas: Lambang '+' menyatakan gabungan/union, bukan penambahan Lambang menyatakan himpunan fuzzy, bukan integral dan PenjumlahanKonsep Dasar [6]
Konsep Dasar [7]
• Variabel fuzzy = variabel dgn nilai berupa label2 himp fuzzy (linguistic values) • Contoh: TEMPERATURE adl variabel fuzzy dgn nilai Low, Medium, Normal, High dan Very_High • Cara inilah yg umum dipergunakan operator utk merujuk var plant terkait dgn nilai nominalnya • Hubungan di antara variabel fuzzy, nilai2 linguistik, nilai2 keanggotaan & semesta pembicaraanKonsep Dasar [8]
Konsep Dasar [9]
• Secara umum, variabel fuzzy dpt dinyatakan dgn memakai: label/nilai linguistik ® Low, Medium, High operator penghubung ® AND, OR, NOT hedges ® extremely, rather, quite, very • Contoh: Variabel TEMPERATURE dapat memiliki nilai-nilai High, NOT High, rather_High, quite_High, NOT very_High, extremely_HighKonsep Dasar [10]
• Ketergantungan suatu variabel fuzzy pada var fuzzy lainnya dapat dinyatakan dgn memakai kalimat bersyarat (fuzzy conditional statement): atau dgn kalimat fuzzy memiliki bentuk umum • Contoh:C. Blok Diagram Fuzzy logic Control
Gambar 10 - Blok Diagram Fuzzy Logic Control
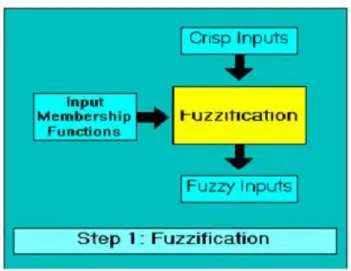
Fuzzification
Gambar 11 - Proses Fuzzification
Fuzzifikasi yaitu suatu proses untuk mengubah suatu masukan dari bentuk tegas (crisp) menjadi fuzzy (variabel linguistik) yang biasanya disajikan dalam bentuk himpunan-himpunan fuzzy dengan suatu fungsi kenggotaannya masing-masing. Contoh dari proses Fuzzification adalah seperti yang ditunjukkan di gambar 4. Sebuah sistem fuzzy untuk mengukur suhu mempunyai 5 buah membership function yang mempunyai label sangat dingin, dingin, hangat, panas, sangat panas. Kemudian input yang diperoleh dari crisp input adalah 47° maka pengambilan fuzzy input-nya adalah seperti pada gambar 4. Gambar 12 - Proses perubahan dari crisp input menjadi fuzzy input Sehingga didapat 2 fuzzy input yang masing-masing adalah: dingin (x2) dan hangat (x1). Nilai x1 dan x2 dapat dicari dengan rumus persamaan garis. Yang menentukan sistem anda sensitif atau tidak adalah membership function ini. Jika membership function-nya banyak maka sistem anda menjadi sensitif. Yang dimaksud dengan sensitif dalam hal ini adalah jika input-nya berubah sedikit saja maka sistem akan cepat merespon dan menghasilkan suatu output lain. Output dari proses fuzzification ini adalah sebuah nilai input fuzzy atau yang biasanya dinamakan fuzzy input. Fuzzy Membership Jika X adalah suatu kumpulan obyek-obyek dan x adalah elemen dari X. Maka himpunan
dimana nilai berada dalam rentang 0 hingga 1. Terdapat dua cara yang lazim dalam merepresentasikan himpunan fuzzy, yang dapat dilihat pada Gambar 1, yaitu : 1. , jika X adalah merupakan koleksi objek diskrit. 2. , jika X adalah merupakan koleksi objek kontinyu. Gambar 13 - Fungsi keanggotaan dengan semesta pembicaraan, (a).diskrit, (b).kontinyu (a) (b) Fuzzy Membership Operation Seperti pada himpunan klasik, himpunan fuzzy juga memiliki operasi himpunan yang sama yaitu gabungan (union), irisan (intersection) dan komplemen. Sebelumnya akan didefinisikan dulu mengenai himpunan bagian yang memiliki peranan penting dalam himpunan fuzzy.
• Union (Gabungan)
Gabungan dari dua buah himpunan fuzzy A dan B adalah himpunan fuzzy C ditulis sebagai atau , memiliki fungsi keanggotaan yang berhubungan dengan A dan B yang didefinisikan sebagai berikut:
; dengan adalah operator biner untuk fungsi S dan biasa disebut sebagai operator T-conorm atau S-norm, yang memiliki sifat-sifat sebagai berikut: S(1,1) = 1, S(0,a) = S(a,0) = a (boundary); S(a,b) £ S(c,d) jika a £ c dan b £ d (monotonicity); S(a,b) = S(b,a) (commutativity); S(a,S(b,c)) = S(S(a,b),c) (associativity). • Intersection (Irisan) Irisan dari dua buah himpunan fuzzy A dan B adalah himpunan fuzzy C dituliskan sebagai atau , memiliki fungsi keanggotaan yang berhubungan dengan A dan B yang didefinisikan sebagai berikut: dengan adalah operator bineri untuk fungsi T, yang biasa disebut sebagai operator T-norm, yang memiliki sifat-sifat sebagai berikut: T(0,0) = 0, T(a,1) = T(1,a) = a (boundary); T(a,b) £ T(c,d) jika a £ c dan b £ d (monotonicity); T(a,b) = T(b,a) (commutativity); T(a,T(b,c)) = T(T(a,b),c) (associativity). Fuzzy Set Membership Function Fungsi-fungsi keanggotaan fuzzy terparameterisasi satu dimensi yang umum digunakan diantaranya adalah: 1. Fungsi keanggotaan segitiga, disifati oleh parameter{a,b,c} yang didefinisikan sebagai berikut: bentuk yang lain dari persamaan di atas adalah
2. Fungsi keanggotaan trapesium, disifati oleh parameter{a,b,c,d} yang didefinisikan sebagai berikut:
parameter {a,b,c,d} (dengan a<b<c<d) yang menentukan koordinat x dari keempat sudut trapesium tersebut, seperti terlihat pada Gambar 2(b). 3. Fungsi keanggotaan Gaussian, disifati oleh parameter {c,s} yang didefinisikan sebagai berikut: Fungsi keanggotaan Gauss ditentukan oleh parameter c dan s yang menunjukan titik tengah dan lebar fungsi, seperti terlihat pada Gambar 2(c) .
Gambar 2. Kurva fungsi keanggotaan, (a).segitiga(x;20,50.80), (b).trapesium (x;10,30,70,90), (c).gaussian(x;50,15), (d).bell(x;10,2,50), (e).sigmoid (x;0.2,50) dan (f).sigmoid(x;-0.2,50). 4. Fungsi keanggotaan generalized bell, disifati oleh parameter {a,b,c} yang didefinisikan sebagai berikut: parameter b selalu positif, supaya kurva menghadap kebawah, seperti terlihat pada Gambar 2(d). 5. Fungsi keanggotaan sigmoid, disifati oleh parameter {a,c} yang didefinisikan sebagai berikut: parameter a digunakan untuk menentukan kemiringan kurva pada saat x = c. Polaritas dari a akan menentukan kurva itu kanan atau kiri terbuka, seperti terlihat pada Gambar 2.(d) dan 2.(e).
Fuzzy IF-Then Rule
Kaidah fuzzy If-Then (dikenal juga sebagai kaidah fuzzy, implikasi fuzzy atau pernyataan kondisi fuzzy) diasumsikan berbentuk: Jika x adalah A maka y adalah B Dengan A dan B adalah nilai linguistik yang dinyatakan dengan himpunan fuzzy dalam semesta pembicaraan X dan Y. Sering kali “x adalah A” disebut sebagai antecedent atau premise, sedangkan “y adalah B” disebut consequence atau conclusion. Kaidah fuzzy if-then “jika x adalah A maka y adalah B” sering kali disingkat dalam bentuk A®B yang merupakan suatu bentuk relasi fuzzy biner R pada produk ruang X ´ Y. Terdapat dua cara untuk menyatakan A®B, yaitu sebagai A coupled with B dan A entails B. Jika dinyatakan sebagai A coupled with B maka didefinisikan sebagai berikut: dengan adalah operator T-norm. Sedangkan jika dinyatakan sebagai A entails B maka didefinisikan sebagai berikut: - material implication:
- generalization of modus ponens: dengan R=A®B dan adalah operator T-norm.
Fuzzy Reasoning
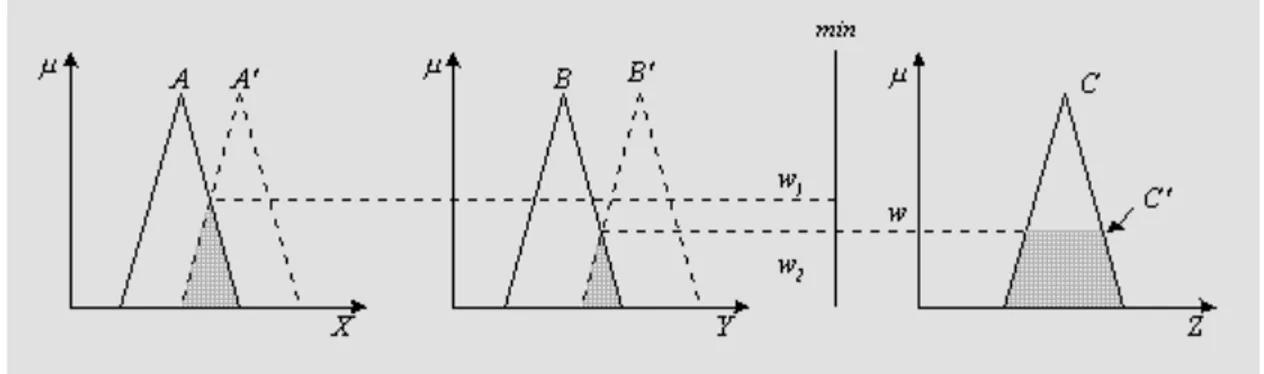
Kaidah dasar dalam menarik kesimpulan dari dua nilai logika tradisional adalah modus ponens, yaitu kesimpulan tentang nilai kebenaran pada B diambil berdasarkan kebenaran pada A. Sebagai contoh, jika A diidentifikasi dengan “tomat itu merah” dan B dengan “tomat itu masak”, kemudian jika benar kalau “tomat itu merah” maka “tomat itu masak”, juga benar. Konsep ini digambarkan sebagai berikut: premise 1 (kenyataan) : x adalah A, premise 2 (kaidah) : jika x adalah A maka y adalah B. Consequence (kesimpulan) : y adalah B. Secara umum dalam melakukan penalaran, modus ponens digunakan dengan cara pendekatan. Sebagai contoh, jika ditemukan suatu kaidah implikasi yang sama dengan “jika tomat itu merah maka tomat itu masak”, misalnya “tomat itu kurang lebih merah,” maka dapat disimpulkan “tomat itu kurang lebih masak”, hal ini dapat dituliskan seperti berikut: premise 1 (kenyataan) : x adalah A’, premise 2 (kaidah) : jika x adalah A maka y adalah B. Consequence (kesimpulan) : y adalah B’. Dengan A’adalah dekat ke A dan B’adalah dekat ke B. Ketika A, B, A’ dan B’adalah himpunan fuzzy dari semesta yang berhubungan, maka penarikan kesimpulan seperti tersebut dinamakan penalaran dengan pendekatan (approximate reasoning) yang disebut juga dengan generalized modus ponens (GMP). Untuk mendefinisikan penalaran fuzzy, dimisalkan A, A’ dan B adalah himpunan fuzzy dari X, X dan Y, dengan A®B adalah suatu relasi R pada X´Y. Kemudian himpunan fuzzy B diinduksikan oleh “x adalah A” dan kaidah fuzzy “jika x adalah A maka y adalah B” didefinisikan sebagai berikut: (15) atau sama dengan (16)• Kaidah Tunggal dengan Antecedent Tunggal Kaidah tunggal dengan antecedent tunggal merupakan contoh yang paling sederhana dari formula pada Persamaan. Selanjutnya fungsi keanggotaan B’ adalah bagian warna gelap pada Gambar 14 yang merupakan fungsi keanggotaan B yang terpotong oleh w. Gambar 14 - Penjelasan secara grafis dari GMP menggunakan implikasi Mamdani dan komposisi max-min. • Kaidah Tunggal dengan Antecedent Jamak Kaidah fuzzy if-then dengan dua antecedent, biasanya ditulis sebagai “jika x adalah A dan Y adalah B maka z adalah C”. Masalah yang berhubungan dengan GMP dijelaskan dengan: premise 1 (kenyataan) : x adalah A’ dan y adalah B’, premise 2 (kaidah) : jika x adalah A dan y adalah B maka z adalah C. Consequence (kesimpulan) : z adalah C’. Kaidah fuzzy pada premise 2 dapat dibawa ke bentuk sederhana yaitu “A´B C” yang kemudian dapat diubah menjadi relasi fuzzy ternary Rm, berdasarkan fungsi implikasi Mamdani. proses ini ditunjukan oleh Gambar 15, dimana MF yang dihasilkan yaitu C’ adalah sama dengan MF C yang dipotong oleh firing strength w.
Gambar 15 - Aproximate reasoning untuk antecedent jamak. • Kaidah Jamak dengan Antecedent Jamak Untuk menjelaskan kaidah jamak, biasanya menganggap sebagai gabungan dari relasi fuzzy yang berhubungan dengan kaidah fuzzy. Karena itu, permasalahan GMP dituliskan sebagai: premise 1 (kenyataan) : x adalah A’ dan y adalah B’, premise 2 (kaidah 1) : jika x adalah A1 dan y adalah B1
maka z adalah C1.
Premise 3 (kaidah 2) : jika x adalah A2 dan y adalah B2
maka z adalah C2. Consequence (kesimpulan) : z adalah C’. Proses di atas secara grafis dijelaskan pada Gambar 16. Gambar 16 - Penalaran fuzzy untuk kaidah jamak dengan antecedent jamak.
Proses di atas dapat dibuktikan dengan menggunakan dua buah relasi R1= A1´B1C1 dan
R2= A2´B2 ‘C2, karena operator adalah bersifat distributif terhadap operator È, maka
selanjutnya gabungan dari dua relasi tersebut.
D. Peraturan berbasis sistem (Rule-based systems)
Dalam ilmu komputer , sistem berbasis aturan digunakan sebagai cara untuk menyimpan dan memanipulasi pengetahuan untuk menginterpretasikan informasi dalam cara yang bermanfaat. Mereka sering digunakan dalam kecerdasan buatan aplikasi dan penelitian.
Aplikasi
Sebuah contoh klasik dari sistem berbasis aturan adalah domain-spesifik sistem pakar yang menggunakan aturan-aturan untuk membuat pemotongan atau pilihan. Sebagai contoh, sistem pakar mungkin dapat membantu dokter memilih diagnosis yang benar berdasarkan sekelompok gejala, atau bergerak taktis memilih untuk memainkan game. Sistem berbasis Peraturan dapat digunakan untuk melakukan analisis leksikal untuk mengkompilasi atau menafsirkan program komputer, atau dalam pemrosesan bahasa alami . Pemrograman berbasis aturan upaya untuk mendapatkan petunjuk pelaksanaan dari mulai set data dan aturan, yang merupakan metode tidak langsung lebih dari menggunakan bahasa pemrograman imperatif yang berisi langkah-langkah pelaksanaan tedeng aling-aling.Konstruksi
Sebuah sistem berbasis aturan khas memiliki empat komponen dasar: [1] • Daftar aturan atau peraturan dasar, yang merupakan jenis spesifik dari basis pengetahuan . • Sebuah mesin inferensi atau Reasoner semantik , yang menyimpulkan informasi atau mengambil tindakan berdasarkan interaksi antara masukan dan peraturan dasar. Penerjemah menjalankan program sistem produksi dengan melakukan siklus mengenali-tindakan berikut : Pada tahap pertama, sisi kiri semua produksi yang cocok dengan isi memori kerja. Sebagai hasil serangkaian konflik diperoleh, yang terdiri dari instantiations semua, produksi puas. Sebuah Instansiasi produksi adalah daftar ordered kerja unsur-unsur memori yang memenuhi sisi kiri produksi.Act: Pada tahap ketiga, tindakan produksi yang dipilih dalam tahap resolusi konflik dijalankan, tindakan ini dapat mengubah isi memori kerja, Pada akhir tahap ini, tahap pertama dijalankan lagi. • Sementara memori kerja . • koneksi lainnya ke dunia luar di mana sinyal input dan output yang diterima dan dikirim. Gambar 17 - Diagram blok proses Rule Evaluation