1
Penggunaan Metode Bayesian Model Averaging (BMA) Dengan Pendekatan Markov Chain Monte Carlo (MCMC) Untuk Peramalan Kecepatan Angin Rata-rata Harian Stasiun Meteorologi Juanda
Nama Peneliti : Rona Purnamasari NRP : 1307 100 003
Pembimbing I : Dr. rer. pol. Heri Kuswanto, S.Si., M.Si Pembimbing II : Dr. Irhamah, S.Si., M.Si
Abstrak
Beberapa tahun belakangan, Indonesia mengalami perubahan cuaca yang sangat ekstrim dan t idak menentu. Perubahan cuaca yang ekstrim mengakibatkan sulitnya untuk memprediksi cuaca, khususnya kecepatan angin. Beberapa Negara maju seperti Eropa, Amerika, dan K anada telah mengembangkan model peramalan dengan menggunakan ensemble. Luaran dari metode ini berupa peramalan yang berbentuk pdf dan memiliki interval. Salah satu cara memperoleh data ensemble untuk Negara berkembang seperti Indonesia yaitu dengan membangkitkan ensemble tiruan yang memanfaatkan beberapa model time seriesi. Kelebihan peramalan menggunakan ensemble adalah dapat menangkap adanya unsur ketidakpastian . Namun pada ensemble seringkali terjadi underdispresive, sehingga dibutuhkan suatu proses kalibrasi, salah satunya Bayesian Model Averaging (BMA). Estimasi parameternya menggunakan Markov Chain Monte Carlo (MCMC) . Evaluasi peramalan ensemble menggunakan Continuous Ranked Probability (CRPS). Kalibrasi dengan metode ini menghasilkan ensemble yang dapat menangkap observasi kecepatan angin dengan baik daripada ensemble tiruan. Eensemble terkalibrasi juga memiliki kinerja yang cukup baik dengan untuk peramalan yang lebih jauh, seperti peramalan lead ketujuh. Kata kunci : Kecepatan Angin, Ensembel, Bayesian Model Averaging (BMA).Markov Chain Monte Carlo (MCMC).
I. PENDAHULUAN
Garis ekuator yang melintasi Indonesia membuat negara ini dilalui angin yang berasal dari Asia dan Australia, sehingga memiliki dua musim. Hal ini menyebabkan adanya perbedaan cuaca dan iklim pada setiap wilayah Indonesia (Subrata, 2011). Baru-baru ini Indonesia mengalami perubahan cuaca yang sangat ekstrim dan tidak menentu. Perubahan cuaca yang ekstrim mengakibatkan peramalan cuaca sangat sulit diprediksi, khususnya kecepatan angin (Anonim_a, 2011). Selain sebagai unsur pendeteksi cuaca, angin banyak sekali dimanfaatkan dalam berbagai bidang seperti transportasi udara, laut. Kecepatan angin di wilayah Surabaya dan sekitarnya mencapai 30 – 35 km/jam atau ± 15 knot (Temmy, 2011). Keadaan cuaca yang seperti ini akan mempengaruhi kinerja dari transportasi udara, transportasi laut yang ada di Surabaya. Manfaat dan pengaruh buruk dari kecepatan angin di Jawa Timur khususnya Surabaya dan sekitarnya merupakan beberapa fenomena yang mendasari adanya penelitian kali ini.
Beberapa Negara maju telah mengembangkan model peramalan cuaca dengan ensembel (Ensemble Prediction System, EPS) dengan luaran berupa peramalan probabilistik (peramalan berupa interval yang sesuai). Negara-negara tersebut antara lain seperti NAFS (Eropa), ECMWF (Kanada), NCEP (Amerika), dan lain sebagainya. Peramalan ensemble merupakan suatu metode prediksi numerik yang digunakan untuk membangkitkan sampel dari suatu keadaan mendatang. Pembentukan ensemble didasarkan pada beberapa model yang sesuai, sehingga hasil peramalannya didasarkan pada probability
density function (PDF) bukan dari nilai peramalan tunggal (Zhu, 2005). Kelebihan dari peramalan dengan
menggunakan ensembel dibandingkan peramalan deterministik adalah dapat menangkap adanya unsur ketidakpastian (Vrught dkk, 2008). Tetapi peramalan ensemble membutuhkan tingkat komputasi yang sangat canggih dan rumit, sehingga sulit diterapkan di Negara-negara berkembang seperti Indonesia. Oleh sebab itu pada penelitian kali ini ensemble kecepatan angin akan dibangkitkan melalui beberapa model time series yang sesuai.
Ensemble memiliki sifat adanya peristiwa underdispersive underdispersive yaitu nilai peramalannya cenderung terpusat pada suatu titik tertentu dengan varians rendah atau overdispersive yaitu varians cenderung tinggi (Hamill dan Colucci, 1997). Oleh sebab itu perlu adanya suatu proses kalibrasi, salah satunya adalah Bayesian Model Averaging (BMA). Kalibrasi menggunakan BMA dapat menghasilkan suatu peramalan yang berupa pdf yang akan menghasilkan suatu interval. Tetapi untuk menghasilkan kalibrasi yang baik dibutuhkan bobot dan varian yang sesuai sebagai parameter BMA. Penelitian kali ini akan menggunakan estimasi parameter dengan menggunakan Markov Chain Monte
Carlo (MCMC). Rantai markov akan menghasilkan suatu sampling dimana sampling akan berjalan
sampai konvergen dan menghasilkan beberapa kandidat yang nantinya akan dipilih sebagai parameter yang sesuai. MCMC dapat menangani sejumlah parameter BMA dengan dimensi yang relatif tinggi, sehingga ukuran ensembel tidak menjadi masalah. Tujuan penelitian ini adalah peramalan kecepatan
2
angin dengan kalibrasi yang menghasilkan peramalan berupa pdf, karena peramalan dari ensemble terkalibrasi akan akurat dibandingkan peramalan yang berupa satu titik (Sloughter dkk, 2010).II. TINJAUAN PUSTAKA Identifikasi Midel Time Series
Pemilihan model time series untuk penelitian kali ini melalui beberapa tahapan. Tahapan pertama dilakukan identifikasi dengan menggunakan plot ACF dan PACF. Kedua plot memberikan informasi model dari data secara visual. Tahapan kedua melakukan estimasi parameter dengan menggunakan
Conditional Least Square (CLS). Setelah semua parameter didapatkan, maka parameter tersebut harus
diuji signifikansinya. Pengujian signifikansi dilakukan dengan menggunakan uji t-student atau nilai
P-value dengan alfa sebesar 0,05. Setelah parameter signifikan maka residual dari dari model melalui
tahapan diagnostic checking. Pada tahap ini model harus memenuhi asumsi residual white noise dan berdistribusi normal. Penelitian kali dibatasi menggunakan 4 model yang sesuai, artinya beberapa model yang dipilih melalui tahapan Box-Jenkins.
Bayesian Model Averaging (BMA)
Bayesian Model Averaging merupakan model yang digunakan unt uk mengkalibrasi suatu
ensembel dan akan menghasilkan prediksi berupa fungsi densitas (pdf). Studi penerapan metode BMA untuk berbagai masalah peramalan yang berbeda telah menunjukkan bahwa prediksi hasil BMA lebih akurat dan dapat diandalkan dibandingkan teknik multi-model lain yang tersedia (Raftery dkk, 2005). Cara kerja metode BMA adalah dengan memberikan pembobot yang sesuai pada peramalan ensembel. Setiap prediksi ensembel yaitu f1, f2, ..., fk ,k = 1, 2, …, K dikaitkan dengan suatu fungsi kepadatan distribusi bersayarat gk(Δ|fk) yang berarti bahwa fk merupakan syarat terjadi Δ, dimana fk merupakan peramalan terbaik dalam ensembel. Probabilitas BMA dapat dituliskan sebagai berikut :
𝑝𝑝(∆|𝑓𝑓1… 𝑓𝑓𝑘𝑘) = ∑𝐾𝐾𝑘𝑘=1𝑤𝑤𝑘𝑘𝑔𝑔𝑘𝑘(∆|𝑓𝑓𝑘𝑘) (1)
dimana 𝑤𝑤𝐾𝐾 merupakan probabilitas posterior ramalan ke-k yang merupakan ramalan terbaik dan
mempunyai nilai non ne gative serta berjumlah satu, ∑𝐾𝐾𝑘𝑘=1𝑤𝑤𝑘𝑘 = 1. Dalam hal ini 𝑤𝑤𝐾𝐾 dapat disebut
sebagai bobot yang menggambarkan kontribusi masing-masing model terhadap prediksi selama periode training. Probability Distribusi Fuction (PDF) beryarat dari ensembel yang berbeda didekati dengan distribusi normal dengan fungsi linier dari peramalan ensembel asli (sebelum dikalibrasi). Tetapi untuk kasus kecepatan angin, distribusi yang paling mendekati dan mampu menampung karakteristik dari kecepatan angin itu sendiri adalah distribusi Gamma (Sloughter dkk,2010). Sehingga PDF-nya dapat dituliskan sebagai berikut :
𝑔𝑔𝑘𝑘(∆|𝑓𝑓𝑘𝑘) =𝛽𝛽 1 𝑘𝑘𝛼𝛼𝑘𝑘Γ(𝛼𝛼𝑘𝑘)Δ
αk−1exp �−Δ
βk� (2)
dimana ∆ adalah peramalan ensemble terkalibrasi, α adalah parameter bentuk Gamma, dan β adalah parameter skala Gamma. Parameter dari distribusi gamma pada (1) tergantung pada ensembel ramalan anggota fk, Melalui hubungan, 𝜇𝜇𝑘𝑘 = 𝑏𝑏0𝑘𝑘+ 𝑏𝑏1𝑘𝑘𝑓𝑓𝑘𝑘 dan 𝜎𝜎𝑘𝑘= 𝑐𝑐0𝑘𝑘+ 𝑐𝑐1𝑘𝑘𝑓𝑓𝑘𝑘 didapatkan dengan menggunakan
regresi linier pada masing-masing anggota ensemble K dan observasi. Mean BMA prediktif dapat dihitung dengan cara :
𝜇𝜇𝑘𝑘 = 𝛼𝛼𝑘𝑘𝛽𝛽𝑘𝑘
dimana 𝜇𝜇𝑘𝑘 merupakan peramalan deterministik, nilai ini dapat dibandingkan dengan peramalan ensembel
individual atau dengan ensembel mean. Sedangkan untuk varians dari pdf prediksi BMA pada suatu t tertentu dapat dihitung dengan cara :
𝜎𝜎𝑘𝑘= �𝛼𝛼𝑘𝑘𝛽𝛽𝑘𝑘
Parameter standar deviasi yang dipakai adalah konstan pada seluruh anggota ensemble. Hal ini akan mempermudah perhitungan komputasi dan mengurangi resiko overfitting (Sloughter dkk, 2010). Konsep yang dijelaskan pada BMA ini merupakan konsep dengan pendekatan distribusi Gamma yang merupakan distribusi dari kecepatan angin.
Setelah dilakukan prediksi model dengan menggunakan BMA, perlu dilakukan estimasi parameter bobot dan varian dari pdf BMA. Pada penelitian kali ini akan dibahas salah satu pendekatan yang bisa digunakan untuk mengestimasi kedua parameter tersebut yaitu algorithma Markov Chain Monte
3
Markov Chain Monte Carlo (MCMC)Simulasi MCMC berfungsi untuk memperkirakan nilai-nilai yang paling mungkin dari bobot BMA dan variansi, dan pdf yang mendasari distribusi posterior. MCMC dapat menangani sejumlah parameter BMA dengan dimensi yang relatif tinggi, sehingga ukuran ensembel tidak menjadi masalah.
Algoritma yang dipakai dalam MCMC dinamakan Differential Evolution Adaptive Metropolis (DREAM). Ada beberapa keuntungan untuk mengadopsi pendekatan ini. Pertama, pendekatan DREAM merupakan pendekatan yang fleksibel pada berbagai distribusi. Kedua, MCMC simulasi dengan DREAM mampu menangani sejumlah parameter dengan dimensi yang relatif tinggi dari BMA.
Dalam DREAM, sejumlah N rantai Markov yang berbeda dijalankan secara simultan parallel. Jika state dari rantai tunggal diberikan oleh sebuah vektor θ berdimensi d, dimana θ = (w1, …, wk, σ2), maka masing-masing generasi dari N dalam DREAM mendefinisikan suatu populasi Ω berukuran N x d. Lompatan-lompatan dalam rantai i = {1, …, N} dibangkitkan dengan mengambil beda dari beberapa rantai lain dari Ω yang dipilih secara random :
𝜗𝜗𝑖𝑖 = 𝜃𝜃𝑖𝑖+ 𝛾𝛾(𝛿𝛿) ∑ 𝜃𝜃𝑟𝑟(𝑗𝑗 )− 𝛾𝛾(𝛿𝛿) ∑𝛿𝛿 𝜃𝜃𝑟𝑟(𝑛𝑛)+ 𝑒𝑒 𝑛𝑛=1
𝛿𝛿 𝑗𝑗=1
dimana 𝛿𝛿 merupakan jumlah pasangan yang digunakan untuk menghasilkan kandidat, dan r(j), r(n) ∈ {1,.
. . , N - 1}; r (j) ≠ r (n). Rasio Metropolis digunakan sebagai kriteria untuk memutuskan apakah menerima
nilai kandidat atau tidak. Proses ini akan menghasilkan suatu sampel MCMC yang akan mencari ruang parameter yang robust dan efisien. Pada masing-masing langkah, nilai-nilai dalam Ω mengandung informasi paling relevan tentang pencarian parameter. Untuk menjalankan MCMC dengan DREAM dapat digunakan program Matlab. (Vrugt dkk,2008)
Continuous Ranked Probability Score (CRPS)
Kalibrasi dengan menggunakan BMA akan menghasilkan peramalan yang probabilistik.
Continuous Ranked Probability (CRPS) adalah salah satu metode yang digunakan untuk mengevaluasi
hasil peramalan dalam probalistik sehingga prosedur MSE atau MAPE tidak dapat dilakukan. Cara kerja CRPS berhubungan dengan skor rank probabilitas dimana distribusi (cdf) hasil peramalan dibandingkan dengan pengamatan sebenarnya. Persamaan dari CRPS adalah sebagai berikut :
𝐶𝐶𝐶𝐶𝐶𝐶𝐶𝐶 = 𝐾𝐾1∑ ∫ �𝐹𝐹𝑖𝑖𝑓𝑓(𝑥𝑥) − 𝐹𝐹𝑖𝑖0(𝑥𝑥)� 2 𝑑𝑑𝑥𝑥 𝑥𝑥=∞ 𝑥𝑥=−∞ 𝐾𝐾 𝑖𝑖=1
Dimana 𝐹𝐹𝑖𝑖𝑓𝑓(𝑥𝑥) adalah cdf dari hasil peramalan ke i, sedangkan 𝐹𝐹𝑖𝑖0(𝑥𝑥) adalah pengamatan sebenarnya dan
K adalah jumlah ensembel. CRPS adalah merupakan suatu nilai, peramalan dapat dikatakan baik apabila
menghasilkan CRPS yang kecil atau mendekati nol (Gneiting dkk.,2007).
Kecepatan Angin
Angin adalah udara yang bergerak dari satu tempat ke tempat lainnya. Angin berhembus dikarenakan beberapa bagian bumi mendapat lebih banyak panas Matahari dibandingkan tempat yang lain. Permukaan tanah yang panas membuat suhu udara di atasnya naik. Akibatnya udara mengembang dan menjadi lebih ringan. Karena lebih ringan dibanding udara di sekitarnya, udara akan naik. Begitu udara panas tadi naik, tempatnya segera digantikan oleh udara di sekitarnya, terutama udara dari atas yang lebih dingin dan berat. Proses ini terjadi terus menerus. Akibatnya kita bisa merasakan adanya pergerakan udara atau yang kita sebut angin. Berat udara di atas permukaan tanah menghasilkan daya tekan ke bumi. Inilah yang disebut tekanan udara. Udara yang mengembang menghasilkan tekanan udara yang lebih rendah. Sebaliknya, udara yang berat menghasilkan tekanan yang lebih tinggi.
III. METODOLOGI PENELITIAN
Data yang digunakan dalam penelitian ini merupakan data sekunder yang bersumber dari Badan Meteorologi Klimatologi dan Geofisika (BMKG) Indonesia. Variabel yang digunakan dalam penelitian adalah data kecepatan angin harian pertahun, mulai tahun 2008 sampai 2009. Penelitian akan difokuskan pada salah satu stasiun pengamatan besar di Surabaya yaitu Stasiun Meteorologi Juanda. Data akan dibagi menjadi data insample (Januari 2008 sampai September 2009) yang digunakan untuk pemodelan kalibrasi dan peramalan dan data outsample (Oktober 2009 sampai Desember 2009) yang digunakan untuk validasi hasil peramalan. Setelah data terkumpul dan variabel penelitian telah ditentukan, maka langkah-langkah akan dibahas sesuai tujuan penelitian ini, yaitu :
1. Mengetahui hasil peramalan ensemble tiruan dari beberapa model ARIMA time series yang dihasilkan dengan langkah-langkah sebagai berikut:
4
a. Identifikasi kestasioneran data menggunakan time series plot. Kemudian melakukan identifikasisementara untuk model time series dengan menggunakan PACF dan ACF plot.
b. Menemukan model time series yang sesuai dengan menggunakan beberapa asumsi. Pemilihan model yang sesuai melalui tahapan Box Jenkins.
c. Membangkitkan data ensemble tiruan dari beberapa model yang sesuai dengan menggunakan peramalan lead pertama dan lead ketujuh.
d. Mencari parameter alfa dan beta setiap ensemble yang dihasilkan pada setiap lead. e. Membentuk plot distribusi dari parameter yang dihasilkan pada setiap lead
f. Menganalisis interval yang dihasilkan dari setiap lead, kemudian membandingkan hasil kinerja ensemble tiruan dari kedua lead.
2. Mengetahui hasil peramalan kecepatan angin beberapa periode kedepan dengan kalibrasi BMA-MCMC dengan langkah-langkah sebagai berikut:
a. Mengidentifikasi setiap variabel untuk estimasi yaitu anggota ensemble tiruan beserta data observasi kecepatan angin pada lead pertama.
b. Mengidentifikasi perhitungan dengan menggunakan training window 10. c. Mencari bias koreksi yaitu b0 dan b1.
d. Menggunakan sampling sebanyak 50000 untuk mencari ruang parameter. e. Menentukan jumlah dari rantai markov.
f. Mengeluarkan rantai outlier dengan menggunakan inter kuartil IQR test g. Mencari nilai maksimum likelihood untuk menentukan parameter.
h. Menghitung mean dari ensemble dengan menggunakan rumus 𝜇𝜇𝑘𝑘 = 𝑏𝑏0𝑘𝑘+ 𝑏𝑏1𝑘𝑘𝑓𝑓𝑘𝑘.
i. Mendapatkan interval dengan menggunakan program MATLAB dari distribusi mixture.
j. Membandingkan ramalan ensemble terkalibrasi dengan observasi untuk melihat kinerja dari proses kalibrasi.
k. Melakukan langkah a sampai j untuk training window 15, 20, dan 25.
l. Melakukan langkah a sampai k dengan menggunakan ensemble tiruan lead ketujuh.
3. Mengetahui perbandingan CRPS dari hasil peramalan ensemble tiruan dan peramalan terkalibrasi dengan langkah-langkah sebagai berikut:
a. Memasukkan input bo, b1, standart deviasi, dan bobot lead pertama dengan training window 10 dari estimasi parameter menggunakan MCMC-DREAM pada program R.
b. Melakukan perhitungan CRPS setiap hari
c. Melakukan perhitungan CRPS keseluruhan baik untuk ensemble tiruan maupun ensemble terkalibrasi.
d. Membandingkan CRPS yang dihasilkan ensemble tiruan dengan ensemble terkalibrasi. e. Melakukan langkah a sampai d pada lead ketujuh dan pada training window 15, 20, dan 25.
IV. ANALISIS DAN PEMBAHASAN
Statistik Deskriptif Kecepatan Angin Rata-rata Harian Stasiun Meteorologi Juanda Surabaya
Kecepatan angin di Stasiun Juanda pada bulan Januari 2008 sampai September 2009 memiliki rata-rata 8,5 94 km/jam dengan kecepatan angin tertinggi mencapai 26,6 km/jam dan kecepatan angin terendah mencapai 0,5 km/jam. Selisih kecepatan angin tertinggi dan terendah yang cukup besar (26.1 km/jam) memberikan indikasi besarnya keragaman yang terjadi, d apat diketahui dari standar deviasi yaitu sebesar 3,369. Data ini mempunyai nilai kurtosis yang positif sebesar 2,43, sehingga data tersebut memiliki distribusi yang lebih runcing daripada normal. Selain itu data ini juga memiliki nilai skewness yang tidak mendekati nol, yaitu sebesar 1,13 sehingga diistribusinya tidak simetri.
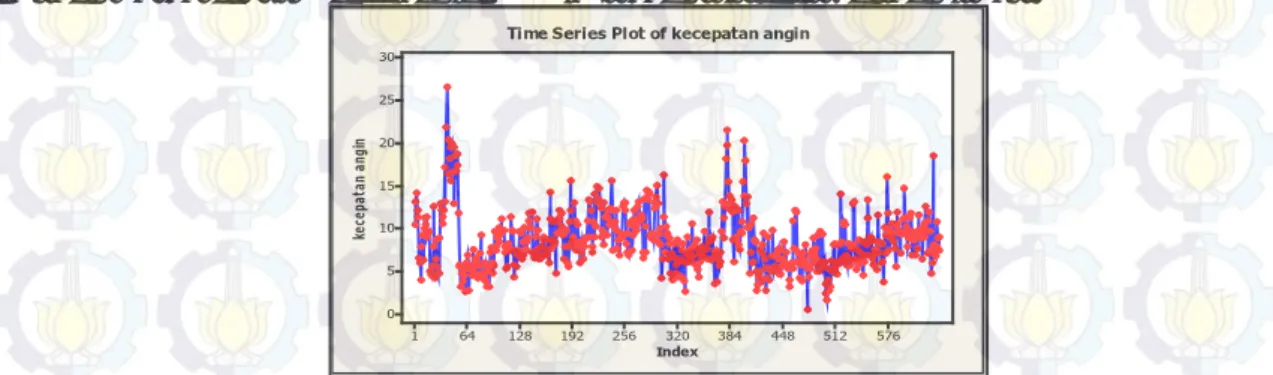
Gambar 1. Plot Data Insample Kecepatan Angin Rata-rata Harian Juanda Surabaya
576 512 448 384 320 256 192 128 64 1 30 25 20 15 10 5 0 Index ke ce pa ta n an gi n
5
Plot time series pada Gambar 1 menggambarkan bahwa secara visual series tidak berada di sekitar mean dan menunjukkan variasi yang besar. Hal ini dapat dilihat pada beberapa titik yang terkadang cenderung tinggi dan adapula yang cenderung rendah jika dibandingkan dengan meannya. Identifikasi secara lanjut terhadap kestationeran dapat dilakukan pada identifikasi terhadap varian dan mean.Tahap awal identifikasi kestasioneran dilakukan dengan ,menggunakan Box-Cox dan hasil yang didapat adalah bahwa data kecepatan angin tidak stationer terhadap varian karena nilai lambda yang dihasilkan sebesar 0,5. Alasan ini yang mengharuskan dilakukannya transformasi akar agar data stationer terhadap varian. Setelah dilakukan transformasi Box Cox, langkah selanjutnya adalah identifikasi stasioneritas terhadap mean dengan menggunakan plot ACF dan PACF terhadap data transformasi.
Gambar 2. Plot ACF dan PACF Data Transformasi Kecepatan Angin
Gambar 2 mengidentifikasikan bahwa nilai-nilai autokorelasinya turun secara eksponensial menuju nol pada lag plot ACF, sehingga dapat dikatakan bahwa data sudah stasioner terhadap mean. Plot PACF menunjukkan bahwa terjadi cut off pada lag pertama, kedua, dan ketiga. Hasil dari kedua plot digunakan sebagai dasar dalam meramalkan model yang sesuai untuk kecepatan angin. Model yang sesuai harus memenuhi beberapa asumsi yaitu parameter signifikan, residual berdistribusi normal, dan mempunyai nilai MSE kecil. Berikut ini beberapa model yang telah dipilih.
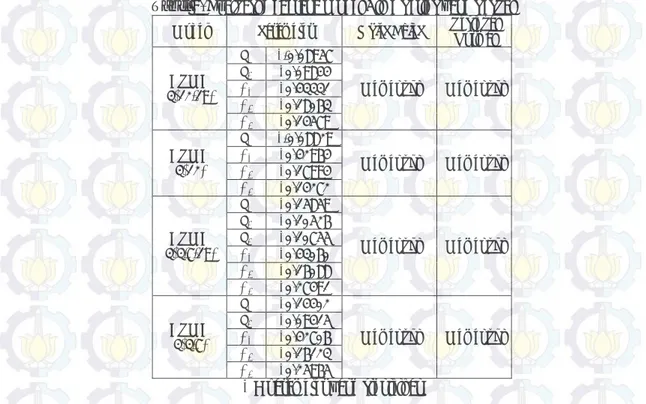
Tabel 1. Evaluasi Beberapa Model Time Series yang Sesuai
Model Parameter White Noise Residual Normal
ARMA 3(12,19) 𝜃𝜃1 *-0.08957 Memenuhi Memenuhi 𝜃𝜃2 *0.09844 ∅1 *0.43331 ∅2 *0.18063 ∅3 *0.14579 ARMA 3(12) 𝜃𝜃1 *-0.08829 Memenuhi Memenuhi ∅1 *0.42964 ∅2 *0.17994 ∅3 *0.14272 ARMA 3(3,7,19) 𝜃𝜃1 *0.15859 Memenuhi Memenuhi 𝜃𝜃2 *0.10526 𝜃𝜃3 *0.10755 ∅1 *0.43060 ∅2 *0.16088 ∅3 *0.27491 ARMA 3(3,7) 𝜃𝜃1 *0.14402 Memenuhi Memenuhi 𝜃𝜃2 *0.09415 ∅1 *0.42706 ∅2 *0.16123 ∅3 *0.25965
* = parameter yang signifikan
Tabel 1 menujukkan bahwa model-model tersebut memiliki nilai parameter yang signifikan, residual white noise dan berdistribusi normal. Setelah didapatkan model yang sesuai berdasarkan tahapan Box Jenkins, maka akan dibentuk ensembel. Anggota ensembel pertama akan dibangkitkan dari model ARMA 3(12,19) yang dalam hal ini disebut sebagai referensi model, begitu juga dengan model-model lainnya. Berikut ini akan dijelaskan melalui ilustrasi bagaimana pembentukan ensembel tiruan serta proses kalibrasi hingga didapatkan peramalan ensembel terkalibrasi.
70 65 60 55 50 45 40 35 30 25 20 15 10 5 1 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 -1.0 Lag A ut oc or re la ti on
Autocorrelation Function for trans
(with 5% significance limits for the autocorrelations)
70 65 60 55 50 45 40 35 30 25 20 15 10 5 1 1.0 0.8 0.6 0.4 0.2 0.0 -0.2 -0.4 -0.6 -0.8 -1.0 Lag Pa rt ia l A ut oc or re la ti on
Partial Autocorrelation Function for trans
6
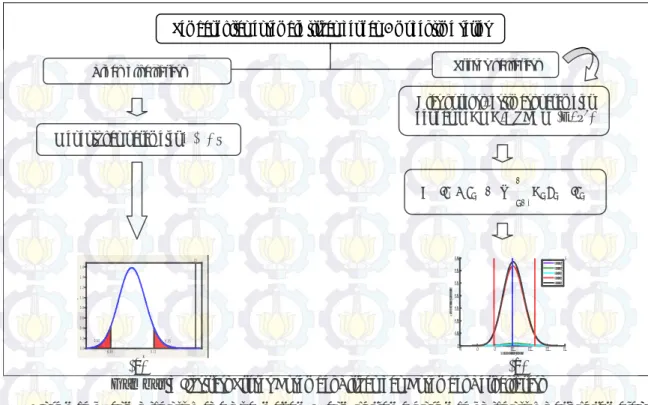
(a) (b)
Gambar 3 Ilustrasi Proses Ensembel Tiruan dan Ensembel Terkalibrasi
Ensembel yang dibentuk ada dua macam, yang pertama ensembel dibentuk dari peramalan lead pertama pada tiap model dan yang kedua ensembel dibentuk dari peramalan lead ketujuh pada tiap model. Gambar 3 merupakan ilustrasi yang diambil pada tanggal yang sama, mulai dari proses pembentukan ensembel hingga pdf predictive dari ensembel terkalibrasi. Ensembel dibangkitkan dari empat model yang berbeda, dimana jumlah data in-sample selalu sama untuk peramalan setiap harinya. Peramalan ensembel dibangkitkan dari tanggal 1 O ktober 2009 s ampai 31 D esember 2009 y ang hasilnya berupa interval. Interval dibentuk dengan mengestimasi parameter dari distribusi gamma (α dan β) dengan selang kepercayaan 90%, sehingga ramalan kecepatan angin menggunakan ensembel tiruan dapat divisualisasikan pada Gambar 3(a). Ensembel tiruan memiliki sifat underdispersive sehingga perlu dilakukan proses kalibrasi.
Proses kalibrasi meliputi bias koreksi mean, penyesuaian varian dan pemberian bobot untuk masing-masing peramalan ensembel. Bias koreksi mean dilakukan dengan panjang training window (m) dan melakukan regresi linear antara data ensembel dengan observasi sebanyak m sebelum hari peramalan. Beberapa training window (m) yang akan dievaluasi adalah 10, 15, 20, da n 25. M isalnya, jika menggunakan m=10 maka perhitungan dimulai tanggal 1 – 10 Oktober 2009, sehingga didapat parameter dan ensembel terkalibrasi pada tanggal 11 Oktober 2009, begitu seterusnya untuk setiap m. Selanjutnya dilakukan estimasi parameter (w, σ2) dengan menggunakan MCMC-DREAM Parameter mean dan σ2 akan digunakan untuk membangkitkan pdf gamma yaitu 𝑔𝑔𝑘𝑘(∆|𝑓𝑓𝑘𝑘) pada persamaan 2, sedangkan untuk w
merupakan bobot dari masing-masing ensembel dalam predictive mixture pdf 𝑝𝑝(∆|𝑓𝑓1… 𝑓𝑓𝑘𝑘) pada
persamaan 1. Rumus Predictive mixture pdf adalah:
𝑝𝑝(∆|𝑓𝑓1… 𝑓𝑓4) = ∑4𝑘𝑘=1𝑤𝑤𝑘𝑘𝑔𝑔𝑘𝑘(∆|𝑓𝑓𝑘𝑘) = 𝑤𝑤1𝑔𝑔1(∆|𝑓𝑓1) + 𝑤𝑤2𝑔𝑔2(∆|𝑓𝑓2) + 𝑤𝑤3𝑔𝑔3(∆|𝑓𝑓3) + 𝑤𝑤4𝑔𝑔4(∆|𝑓𝑓4).
Pdf predictive mixture di atas merupakan pdf dari ensembel terkalibrasi yang akan menghasilkan
peramalan dengan bias kecil dan interval yang padat seperti yang diilustrasikan pada Gambar 3(b).
Peramalan Ensembel Tiruan
Peramalan ensembel tiruan akan disajikan dalam bentuk interval yang dibangkitkan dari distribusi gamma. Berikut ini merupakan gambaran dari peramalan kecepatan angin dengan menggunakan ensembel tiruan pada lead pertama.
1.6 1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.0 X D e n s it y 8.38 0.05 9.21 0.05 10 7 8 9 10 11 12 13 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 kecepatan angin P robabi lity dens it y data1 data2 data3 data4 data5 Pembangkitan ensemble tiruan dengan 4 model time series
Tidak dikalibrasi
Bias koreksi, estimasi parameter
dengan MCMC-DREAM (w, σ2)
Proses kalibrasi
𝑝𝑝(∆|𝑓𝑓1… 𝑓𝑓𝑘𝑘) = � 𝑤𝑤𝑘𝑘𝑔𝑔𝑘𝑘(∆|𝑓𝑓𝑘𝑘)
𝐾𝐾 𝑘𝑘=1
7
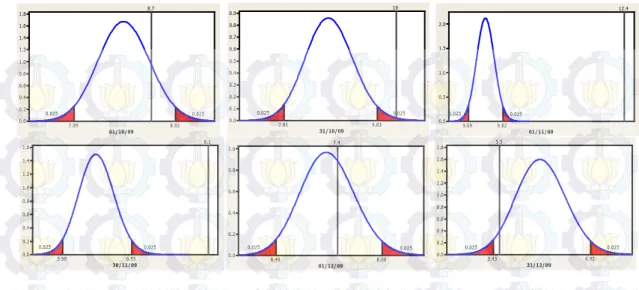
Gambar 4 Peramalan Kecepatan Angin Menggunakan Ensembel Tiruan Lead 1 Bulan Oktober - Desember 2009Ilustrasi yang dipaparkan pada Gambar 4 adalah ensembel tiruan mulai tanggal 1 Oktober 2009 – 31 Desember 2009 dan diambil sebanyak 6 hari untuk lead 1. Plot distribusi menunjukkan pdf peramalan pada setiap tanggalnya sedangkan garis hitam menunjukkan observasi. Penyajian gambar dengan banyak 9 hari mempertimbangkan dari bulan Oktober hingga Desember dan diambil awal, tengah,dan akhir bulan. Apabila diamati dari 6 hari terdapat 3 hari, yaitu tanggal 1 Oktober, 1 Desember, dan 31 Desember 2009, yang dapat menangkap nilai observasi kecepatan angin. Setelah mengetahui peramalan ensembel tiruan menggunakan lead pertama, maka berikut ini akan dilakukan pembahasan terhadap peramalan dengan menggunakan lead ketujuh pada tanggal 7 Oktober 2009.
Gambar 5. Peramalan Kecepatan Angin Menggunakan Ensembel Tiruan Lead 7 Bulan Oktober - Desember 2009 Gambar 5 adalah ensembel tiruan dari kecepatan angin pada lead ketujuh. Keterangan pada ilustrasi ini sama halnya dengan yang dimiliki oleh Gambar 4. Inteval yang dibentuk pada lead 7 cenderung tidak dapat menangkap nilai observasi. Berdasarkan jumlah hari yang dipilih, yaitu 9 hari , hanya 1 y ang nilai observasinya dapat ditangkap oleh interval seperti ditunjukkan pada tanggal 30 November 2009. Adapun nilai observasi yang mendekati interval ditunjukkan tanggal 31 Oktober 2009, sedangkan yang lain cenderung menjauhi interval yang dibentuk oleh ensembel tiruan. Berikut ini akan dibahas ringkasan dari peramalan ensemble tiruan dalam bentuk persentase.
(a) (b)
Gambar 6 Persentase Observasi Pada Interval Ensembel Tiruan 1.8 1.6 1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.0 01/10/09 7.99 0.025 8.92 0.025 8.7 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.0 31/10/09 7.81 0.025 9.63 0.025 10 2.0 1.5 1.0 0.5 0.0 01/11/09 9.09 0.025 9.82 0.025 12.4 1.6 1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.0 30/11/09 5.90 0.025 6.95 0.025 8.1 1.0 0.8 0.6 0.4 0.2 0.0 01/12/09 6.46 0.025 8.08 0.025 7.4 1.8 1.6 1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.0 31/12/09 5.43 0.025 6.42 0.025 5.5 2.5 2.0 1.5 1.0 0.5 0.0 07/10/09 7.96 0.025 8.57 0.025 8.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.0 31/10/09 7.63 0.025 9.66 0.025 10 4 3 2 1 0 01/11/09 y 9.15 0.025 9.53 0.025 12.4 1.6 1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.0 30/11/09 7.35 0.025 8.37 0.025 8.1 2.0 1.5 1.0 0.5 0.0 01/12/09 7.64 0.025 8.49 0.025 7.4 1.8 1.6 1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.0 31/12/096.80 0.025 7.77 0.025 5.5 Masuk Interval 16 17% Keluar Interval 76 83% Masuk Interval 11 13% Keluar Interval 75 87%
8
Ensembel tiruan yang dihasilkan pada lead pertama memiliki interval yang banyak menangkap observasi daripada ensembel tiruan pada lead ketujuh, untuk lebih jelasnya dapat dilihat pada Gambar 6. Ensembel lead 1 pada Gambar 6(a) berjumlah 92 hari dibentuk dari tanggal 1 Oktober 2009-31 Desember 2009. Hasil dari lead pertama adalah observasi yang dapat ditangkap oleh interval ensembel sebanyak 16 hari atau sebesar 17%. Peramalan ensembel lead 7 pada Gambar 6(b) berjumlah 86 hari dibentuk dari tanggal 7 Oktober 2009-31 Desember 2009. Hasilnya adalah observasi yang dapat ditangkap oleh interval sebanyak 11 hari atau sebesar 13%. Peramalan ensembel tiruan untuk kedua lead dapat dikatakan cenderung tidak dapat menangkap nilai observasi sebenarnya dari kecepatan angin, karena banyaknya jumlah nilai observasi harian yang berada diluar interval ensembel. Peristiwa dimana observasi yang tidak dapat ditangkap pada interval ensembel yang terlalu sempit disebut underdispersive. Hal ini ditunjukan pada gambar 4 dan 5 dimana interval yang dihasilkan ensmbel tiruan cenderung sempit. Oleh sebab itu, perlu dilakukan kalibrasi untuk mendapatkan hasil peramalan yang reliabel.Peramalan Ensembel Terkalibrasi
Perhitungan ramalan ensembel terkalibrasi pada penelitian kali menggunakan dua lead. Setiap lead menggunakan training window 10, 15, 20, dan 25 mulai tanggal 1 O ktober – 31 Desember 2009 (lead 1) dan 7 Oktober – 31 Desember 2009. Hal ini untuk melihat bagaimana pengaturan training
window mempengaruhi kinerja dari kalibrasi dari kedua lead.
Tabel 2. Parameter Anggota Ensembel Terkalibrasi Lead 1 dan 7
m Model
Lead 1 (26/10/09) Lead 7 (08/11/09)
Bobot Varian Mean (b0 +
b1fk)
Bobot Varian (bMean
0 + b1fk) 10 1 0.016614 2.27678 10.91451 0.121152 2.03468 15.50208 2 0.480874 2.27678 10.88425 0.048157 2.03468 12.94876 3 0.01425 2.27678 10.77481 0.805698 2.03468 16.26268 4 0.488262 2.27678 10.79998 0.024993 2.03468 14.84572 15 1 0.564344 1.023193 11.00169 0.005956 3.556863 12.41385 2 0.303796 1.023193 11.02756 0.39608 3.556863 11.6041 3 0.043087 1.023193 11.03454 0.070365 3.556863 12.54747 4 0.088773 1.023193 11.0451 0.527599 3.556863 11.64001 20 1 0.199774 3.720233 10.7294 0.731822 0.198026 12.22026 2 0.002751 3.720233 10.84882 0.254007 0.198026 12.06299 3 0.389513 3.720233 10.90321 0.012274 0.198026 12.22072 4 0.407962 3.720233 10.84842 0.001897 0.198026 12.09814 25 1 0.099508 0.00005 6.89418 0.15088 2.48324E-05 11.72243367 2 0.31485 0.00005 9.286537 0.280984 2.48324E-05 11.6508987 3 0.085936 0.00005 7.04682 0.564216 2.48324E-05 11.86296572 4 0.499707 0.00005 8.923428 0.00392 2.48324E-05 11.9115258
Tabel 2 merupakan parameter yang dihasilkan dengan menggunakan MCMC pada tanggal 26 Oktober 2009 untuk lead 1 dan 8 November 2009 untuk lead 7. Pada peramalan lead pertama, perolehan bobot terbesar pada m=10, m=20, m=25 dimiliki oleh model 4, sedangkan bobot terbesar pada m=15 dimiliki oleh model 1. Varian terbesar dihasilkan oleh m=20, sedangkan terkecil oleh m=25. Perolehan bobot terbesar dan varian dapat berubah-ubah pada setiap odel karena sangat tergantung dari proses sampling acak pada MCMC DREAM. Varian yang dihasilkan untuk keempat model sama, pengaturan ini dipakai agar perhitungan komputasi lebih mudah dan menghindari adanya overfitting. Setelah didapatkan bobot, varian, dan mean maka akan dibentuk interval dari suatu pdf predictive terkalibrasi.
Parameter pada lead ketujuh didapatkan dengan menggunakan ensembel tiruan lead ketujuh yang melalui sebuah proses kalibrasi. Bobot terbesar diperoleh model 3 pada m=10 dan m=25, model 4 pada
m=15, dan model 1 pada m=20. Varian terbesar dihasilkan pada m=15 sedangkan untuk varian terkecil
dihasilkan pada m=25. Perolehan bobot pada model untuk setiap training window berbeda-beda. Bobot terbesar diperoleh model 1 pada m=25, model 2 pada m=15, model 3 pada m=10, dan model 4 pada
m=20. Berikut ini adalah parameter yang dihasilkan untuk pdf predictive ensembel terkalibrasi pada
9
Tabel 3 Parameter Pdf Predictive Terkalibrasi Lead 1 dan Lead 7m Mean Lead 1 (26 November 2009) Lead 7 (8 November 2009)
(knot) Varian Batas 1 (knot) Batas 2 (knot) (knot) Mean Varian Batas 1 (knot) Batas 2 (knot)
10 10.8421 2.2787 7.8834 13.8007 15.9755 2.6014 12.8143 19.1368
15 11.0148 1.0234 9.0320 12.9977 11.6943 3.6159 7.9672 15.4213
20 10.8460 3.7242 7.0635 14.6284 12.1801 0.2027 11.2976 13.0626
25 10.5317 0.0042 10.4047 10.6588 11.7824 0.0092 11.5948 11.9699
Nilai mean yang paling mendekati nilai observasi (10,9 knot) lead 1 d itunjukkan pada m=20, yaitu 10,8460 k not, dengan interval yang dihasilkan pa ling lebar dengan varian terbesar dari tiga m lainnya. Nilai mean yang paling mendekati nilai observasi (10,6 knot) ditunjukkan pada m=15, yaitu 11,6943 knot, dengan interval yang dihasilkan paling lebar dan varian terbesar dari tiga m lainnya
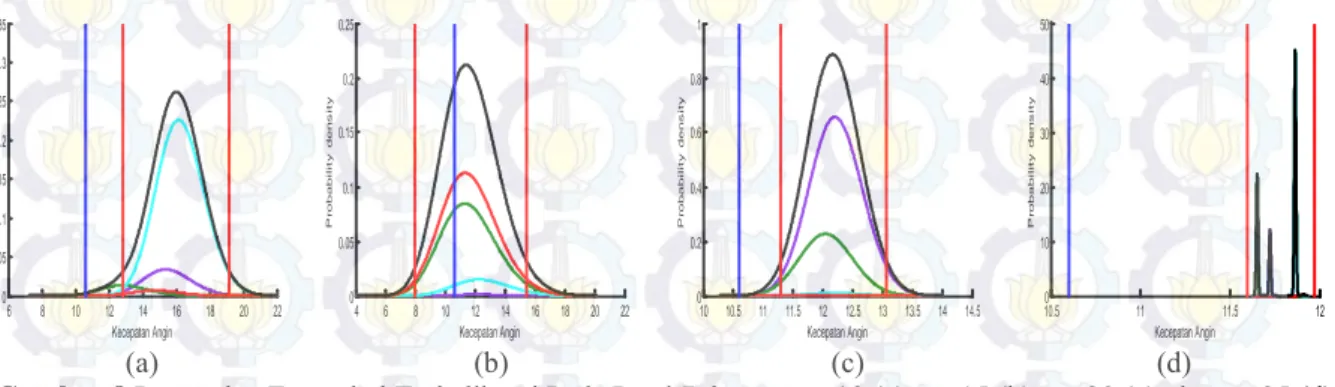
(a) (b) (c) (d)
Gambar 7. Peramalan Ensembel Terkalibrasi Pada Lead 1 dengan m=10 (a), m=15 (b), m=20 (c), dan m=25 (d) Garis putus-putus biru adalah observasi dari kecepatan angin, garis putus-putus merah adalah batas atas dan bawah yang dihasilkan oleh ensembel terkalibrasi. Kurva berwarna ungu, hijau, biru muda, dan merah secara berurutan merupakan ensembel 1, 2, 3, dan 4. Sedangkan kurva pdf berwarna hitam adalah pdf predictive terkalibrasi. Ensembel terkalibrasi pada tanggal 26 Oktober 2009 untuk m=10, 15, dan 20 mampu menangkap nilai observasi kecepatan angin, sedangkan m=25 tidak dapat menangkap nilai observasi. Berdasarkan keempat ensembel terkalibrasi, ensembel yang menghasilkan kinerja paling baik yaitu dengan menggunakan m=15 (Gambar 7(b)). Hal ini dapat diamati pada interval yang dihasilkan yaitu 9,0320 – 12,9977 knot, interval ini dianggap paling sesuai karena mampu menangkap nilai observasi dengan baik dan nilai observasi berada dekat dengan nilai rata-rata kurva pdf predictive terkalibrasi. Apabila dikaitkan dengan Tabel 3, interval paling sempit dihasilkan oleh m=25 (10,4047 – 10,6588 knot) yang memiliki nilai varian yang paling kecil, sedangkan untuk interval terlebar dihasilkan oleh m=20 (7,0635 – 14,6284 knot) yang memiliki varian yang terbesar. Kedua parameter dapat berubah-ubah untuk setiap m, tidak selalu ensembel terkalibrasi yang bagus dihasilkan oleh m=15. Hal ini menunjukkan bahwa secara umum pengaturan training window mempengaruhi kinerja dari proses kalibrasi. Ensembel yang memiliki bobot terbesar, maka nilai pdfnya akan mendekati pdf predictive terkalibrasi. Peristiwa ini menunjukkan bahwa jika ensembel tersebut memiliki bobot terbesar, maka ensembel tersebut akan memberikan kontribusi terbesar dalam pembentukan pdf terkalibrasi.
(a) (b) (c) (d)
Gambar 8 Peramalan Ensembel Terkalibrasi Pada Lead 7 dengan m=10 (a), m=15 (b), m=20 (c), dan m=25 (d) Gambar 8 memiliki keterangan yang sama dengan Gambar 7 diatas. Ensembel terkalibrasi yang dapat menangkap nilai observasi kecepatan angin ditunjukkan pada m=15, sedangkan untuk m=10, m=20, dan
m=25, nilai observasinya tidak masuk ke dalam interval. Kalibrasi yang dengan training window 15 pada
tanggal 8 November menghasilkan interval yang sesuai (7,9672 – 15,4213 knot), distribusi yang padat,
4 6 8 10 12 14 16 18 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 Kecepatan Angin P r obabi l i t y dens i t y 6 7 8 9 10 11 12 13 14 15 16 0 0.1 0.2 0.3 0.4 Kecepatan Angin P r obabi l i t y dens i t y 2 4 6 8 10 12 14 16 18 20 0 0.05 0.1 0.15 0.2 0.25 Kecepatan Angin P r obabi l i t y dens i t y 10.3 10.4 10.5 10.6 10.7 10.8 10.9 0 5 10 15 20 25 30 Kecepatan Angin P r obabi l i t y dens i t y 6 8 10 12 14 16 18 20 22 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 Kecepatan Angin P r obabi li t y dens i t y 4 6 8 10 12 14 16 18 20 22 0 0.05 0.1 0.15 0.2 0.25 Kecepatan Angin P r obabi li t y dens i t y 10 10.5 11 11.5 12 12.5 13 13.5 14 14.5 0 0.2 0.4 0.6 0.8 1 Kecepatan Angin P r obabi li t y dens i t y 10.5 11 11.5 12 0 10 20 30 40 50 Kecepatan Angin P r obabi li t y dens i t y
10
dan mampu menangkap observasi kecepatan angin. Beberapa interval yang tidak dapat mengkap observasi antara lain m=10 (12,8143 – 19,1368 knot), m=20 (11,2976 – 13,0626 knot), m=25 (11,5948 – 11,9699 knot). Apabila dikaitkan dengan Tabel 2 unt uk lead 7 diatas, ensembel yang memiliki bobot terbesar maka akan berkontribusi besar dalam pembentukan pdf predictive terkalibrasi. Varian terbesar dimiliki oleh m=15, dimana varian ini menghasilkan interval dengan batas yang sesuai. Varian terkecil dimiliki oleh m=25, varian ini menghasilkan interval yang terlalu sempit sehingga menjadi salah satu penyebab tidak dapat ditangkapnya nilai observasi.Evaluasi lebih lanjut akan dibahas dengan membandingkan bagaimana kinerja ensembel terkalibrasi pada setiap lead. Berikut ini ringkasan perbandingan ensembel terkalibrasi antara lead pertama dengan lead ketujuh.
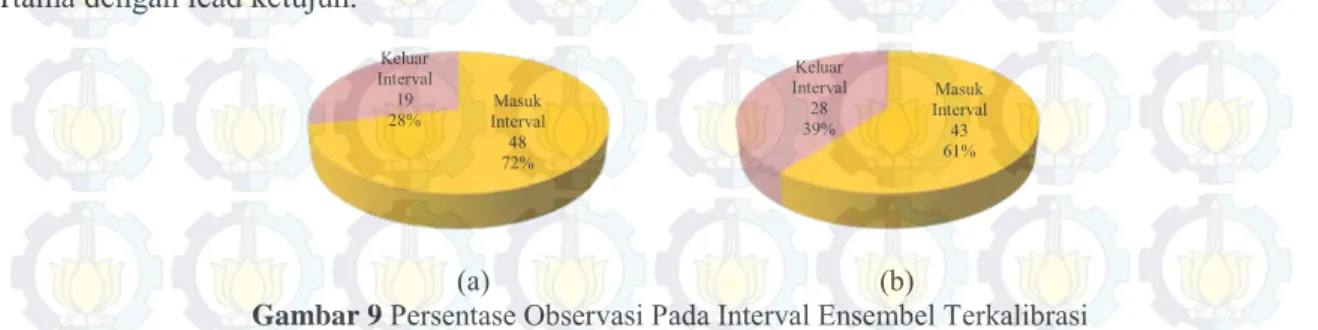
(a) (b)
Gambar 9 Persentase Observasi Pada Interval Ensembel Terkalibrasi
Gambar 9 merupakan hasil peramalan ensembel terkalibrasi dimana persentase mewakili berapa banyak observasi yang dapat ditangkap oleh ensembel terkalibrasi. Persentase dari kedua lead diambil dari m yang optimum. Lead pertama optimum pada m=25 dan lead ketujuh optimum pada m=15. Penentuan m paling optimum didasari dari nilai CRPS paling kecil. Ensembel terkalibrasi lead pertama (Gambar 9(a)) mampu menangkap nilai observasi kecepatan angin sebesar 72% atau 48 hari dari 67 pengamatan. Ensembel terkalibrasi pada lead ketujuh (Gambar 9(b)) mampu menangkap nilai observasi dari kecepatan angin sebesar 61% atau 43 hari dari 71 pengamatan. Meskipun lead pertama lebih banyak menangkap nilai observasi tetapi kinerja dari ensembel terkalibrasi untuk pengamatan yang lebih jauh, seperti lead ketujuh, dapat dikatakan cukup baik. Evaluasi kinerja antara ensembel tiruan dengan ensembel terkalibrasi lebih tepatnya dilakukan dengan evaluasi nilai CRPS. Digunakannya evaluasi CRPS dikarenakan kedua ensembel menghasilkan peramalan berupa pdf.
Evaluasi Kinerja Peramalan Ensembel Tiruan dengan Ensembel Terkalibrasi Kecepatan Angin
Evaluasi kali ini akan membandingkan kinerja dari ensembel tiruan dengan ensembel terkalibrasi pada masing-masing lead dan masing-masing training window. Secara umum CRPS didapatkan dari selisih cdf ensembel dengan nilai pengamatan sebenarnya (Gneiting dkk, 2007).
Tabel 4 Evalusi Peramalan Ensembel
Lead Ensembel m=10 Continuous Ranked Probability (CRPS) m=15 m=20 m=25
1 Kalibrasi Tiruan 1.873677 1.793905 1.713801 1.602921 1.702184 1.642411 1.715797 1.511725
7 Kalibrasi Tiruan 2.235117 2.068345 2.275138 1.853319 2.340278 2.059317 2.467729 2.135959
Tabel 4 adalah evaluasi peramalan ensembel dengan menggunakan CRPS. Peramalan dapat dikatakan baik apabila nilai CRPS yang dihasilkan kecil. Secara keseluruhan untuk lead pertama keempat
m menghasilkan C RPS lebih kecil pada ensembel terkalibrasinya. Sama halnya dengan ensembel
terkalibrasi pada lead 7, jika diamati pada setiap m-nya, CRPS yang dihasilkan ensembel terkalibrasi lebih kecil daripada ensembel tiruan, sehingga pada lead 7 dapat dikatakan bahwa ensembel terkalibrasi masih baik digunakan unutuk meramalkan kecepatan angin. Lead pertama menghasilkan kalibrasi yang baik dengan m =25 sedangkan lead ketujuh pada m = 15. Hal ini ditunjukkan oleh nilai CRPS yang paling kecil pada setiap m. Hasil evaluasi menunjukkan bahwa peramalan kecepatan angin dengan menggunakan ensembel terkalibrasi lebih baik daripada menggunakan ensembel tiruan.
V. KESIMPULAN Kesimpulan
Berdasarkan hasil analisis dan pembahasan dari penelitian ini dapat diambil kesimpulan sebagai berikut:
1. Peramalan dengan menggunakan ensemble tiruan menghasilkan peramalan berupa pdf dan memiliki interval. Ensembel tiruan pada lead pertama dapat menangkap observasi kecepatan angin sebesar
Masuk Interval 48 72% Keluar Interval 19 28% Masuk Interval 43 61% Keluar Interval 28 39%
11
17% atau 16 hari dari 92 pengamatan (1 Oktober – 31 Desember 2009). Ensembel tiruan pada lead ketujuh dapat menangkap observasi kecepatan angin sebesar 13% atau 11 hari dari 86 pengamatan (7 Oktober – 31 Desember 2009). Interval yang dihasilkan ensemble tiruan dari kedua lead tidak mampu menangkap observasi kecepatan angin dengan baik.2. Peramalan ensemble terkalibrasi menggunakan training window sebesar 10, 15 , 20, da n 25 unt uk setiap lead. Hasil optimum pengaturan training window pada lead pertama menggunakan 25, sedangkan untuk lead ketujuh menggunakan training window 15. Peramalan ensemble terkalibrasi pada lead pertama dapat menangkap observasi kecepatan angin sebesar 72% atau 48 hari dari 67 pengamatan (26 Oktober – 31 Desember 2009). Peramalan ensemble terkalibrasi pada lead ketujuh dapat menagkap observasi kecepatan angin sebesar 61% atau 41 hari dari 71 pengamatan (22 Oktober – 31 Desember 2009). Interval dari ensemble terkalibrasi mampu menangkap observasi kecepatan angin dengan baik, bahkan dengan peramalan yang lebih jauh yaitu lead tujuh.
3. Hasil evaluasi dengan menggunakan CRPS didapatkan bahwa ensemble terkalibrasi menghasilkan CRPS lebih kecil daripada ensemble tiruan. Hal ini menunjukkan bahwa peramalan kecepatan angin dengan menggunakan ensemble terkalibrasi lebih baik daripada ensemble tiruan. Interval yang dihasilkan ensemble terkalibrasi lebih banyak menangkap nilai observasi dari kecepatan angin daripada interval yang dihasilkan oleh ensemble tiruan.
.
Saran
Penelitian lebih lanjut dapat digunakan jumlah ensemble yang lebih banyak atau lebih dari jumlah ensemble pada penelitian kali ini dan menambah panjang dari training window. Hal ini bertujuan untuk melihat sejauh mana BMA dapat digunakan untuk meramalkan kecepatan angin.
DAFTAR PUSTAKA