Optimalisasi Intensitas Cahaya Pada Tanaman
Pertumbuhan populasi manusia terus meningkat tiap tahunnya. Pertumbuhan ini dibarengi dengan semakin meluasnya pemukiman untuk tempat tinggal terutama di daerah perkotaan. Hutan dan lahan pertanian menjadi korban dari pertumbuhan populasi yang tidak terkendali tersebut. Kondisi lahan pertanian yang semakin sempit di Indonesia, serta musim yang tidak menentu menjadikan metode urban farming dapat menjadi solusi bagi pertanian Indonesia. Dengan ditambahkan pengaturan otomatis menggunakan perangkat Arduino dapat mempermudah dalam bercocok tanam metode urban farming. Dilakukan proses pembangunan sensor cahaya menggunakan perangkat keras arduino yang sudah diinputkan bahasan pemrograman arduino agar dapat memproses inputan sinyal cahaya yang diterima oleh sensor LDR, sehingga mampu untuk menggerakkan motor servo. Hasil evaluasi penelitian ini yaitu, menghasilkan sebuah alat yang mampu untuk mendeteksi keberadaan cahaya, motor servo dapat bergerak mengikuti arah sumber cahaya. Hasil pergerakan motor servo tersebut dapat memberikan intensitas cahaya yang mencukupi untuk tumbuhan dalam melakukan proses fotosintesis.
I. Pendahuluan
Pertumbuhan populasi manusia terus meningkat tiap tahunnya. Pertumbuhan ini dibarengi dengan semakin meluasnya pemukiman untuk tempat tinggal terutama di daerah perkotaan. Hutan dan lahan pertanian menjadi korban dari pertumbuhan populasi yang tidak terkendali tersebut. Banyak lahan pertanian yang kini sudah berubah menjadi bangunan pemukiman maupun keperluan industri. Perlu adanya inovasi untuk mempertahankan kondisi keberadaan lahan untuk bercocok tanam. Sebagai contoh di perkotaan masyarakat bisa melakukan urban farming untuk mendukung hasil pertaniannya.
didapat karena berhubungan erat dengan aktivitas fotosintesis tanaman. Pengaturan cahaya pada tanaman dapat dilakukan dengan mengubah-ubah intensitas dan warna cahaya yang digunakan sehingga cahaya yang didapat tanaman akan sesuai dengan panjang gelombang yang dapat diterima tanaman.
Pengaturan cahaya secara otomatis dapat dilakukan menggunakan perangkat Arduino. Arduino merupakan suatu papan elektronik yang mengandung mikrokontoller di dalamnya dan dapat diprogram menggunakan bahasa Processing. Perangkat Arduino merupakan perangkat keras open source, perangkat keras open source dapat dikembangkan dengan penambahan komponen dan secara umum pengembangnya akan berbeda di seluruh dunia. Serta software
Arduino dapat diunduh, dipakai, dikembangkan, diubah, bahkan dijual kembali. Jenis Arduino yang digunakan adalah Arduino UNO, perangkat ini memiliki pin input/output.
Kondisi lahan pertanian yang semakin sempit di Indonesia, serta musim yang tidak menentu menjadikan metode urban farming dapat menjadi solusi bagi pertanian Indonesia. Dengan ditambahkan pengaturan otomatis menggunakan perangkat Arduino dapat mempermudah dalam bercocok tanam metode urban farming.
II. Studi Pustaka
Penggunaan naungan pada tanaman digunakan untuk mengurangi intensitas cahaya yang berlebih, namun naungan akan tetap mengurangi intensitas cahaya meskipun cuaca sedang mendung sehingga tanaman berada pada kondisi terlalu teduh atau kurang cahaya matahari. Oleh karena itu dibuatlah suatu alat yang dapat mencari sumber cahaya untuk menambah intensitas cahaya itu sendiri. Dengan membuat alat pengendali intensitas cahaya otomatis dengan desain sendiri, sehingga cahaya yang menyinari tanaman bisa diatur dengan mencari sumber cahaya yang ada. (Hasil et al., n.d.)
Sebaran intensitas cahaya di dalam penelitian ini masih belum merata. Untuk itu perlu dilakukan pengondisian. Cahaya matahari yang digunakan untuk perbandingan sumber cahaya dengan LED masih terlalu besar dan penggunaan sistem masih belum optimal.(Program, Fisika, Program, & Fisika, n.d.).
Perancangan pembuatan sensor cahaya membutuhkan beberapa barang yang diperlukan, sebelumnya kami membuat perancangan pengkabelan antara alat-alat yang digunakan. Berikut alat-alat yang digunakan.
A. Arduino Uno
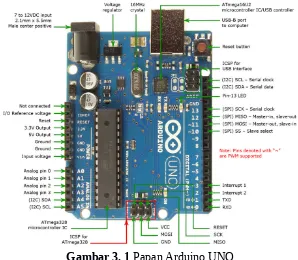
Arduino uno adalah pengendali mikro single-board yang bersifat open-source diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.
Gambar 3. 1 Papan Arduino UNO
Perangkat keras arduino uno memiliki Atmel AVR dan softwarenya memiliki bahasa pemrograman sendiri.
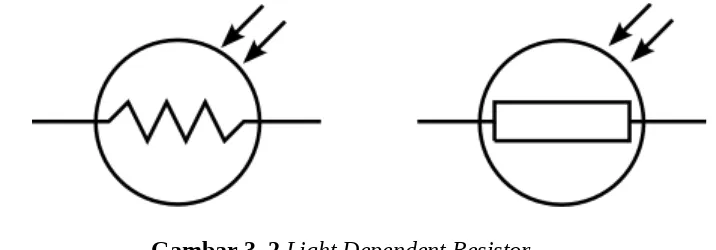
B. Sensor Light Dependent Resistor (LDR)
sekitar 1 MΩ dalam kondisi gelap gulita dan kurang dari 1 KΩ ketika ditempatkan dibawah sumber cahaya terang (Mike Tooley, 2003).
Gambar 3. 2 Light Dependent Resistor
LDR adalah suatu bentuk komponen yang mempunyai perubahan resistansi yang besarnya tergantung pada cahaya. Karakteristik LDR terdiri dari dua macam yaitu Laju Recovery dan Respon Spektral:
1. Laju Recovery
Bila sebuah LDR dibawa dari suatu ruangan dengan level kekuatan cahaya tertentu kedalam suatu ruangan yang gelap, maka bisa kita amati bahwa nilai resistansi dari LDR tidak akan segera berubah resistansinya pada keadaan ruangan gelap tersebut. Namun LDR tersebut hanya akan bisa mencapai harga di kegelapan setelah mengalami selang waktu tertentu. Laju recovery merupakan suatu ukuaran praktis dan suatu kenaikan nilai resistansi dalam waktu tertentu. Harga ini ditulis dalam K /detik, untuk LDR type arus harganya lebih besar dari 200 K /detik (selama 20 menit pertama mulai dari level cahaya 100 lux), kecepatan tersebut akan lebih tinggi pada arah sebaliknya, yaitu pindah dari tempat gelap ke tempat terang yang memerlukan waktu kurang dari 10 ms untuk mencapai resistansi yang sesuai dengan level cahaya 400 lux.
2. Respon Spectral
C. Kabel jamper
Kabel jumper digunakan untuk menghubungkan antara arduino dan komponen-komponen lainnya.
Gambar 3. 2 Kabel Jumper
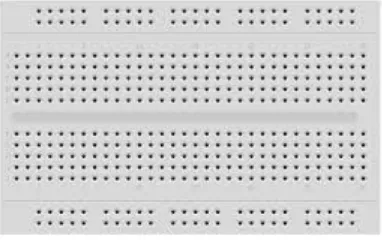
D. Breadboard
Breadboard sejenis papan rangkaian yang umum digunakan untuk menghubungkan rangkaian elektronika dalam hal ini peralatan untuk membangun radar.
Gambar 3. 3 Breadboard
sebelum rangkaian elektronika tersebut dicetak pada papan rangkaian tercetak (PCB) bisa menggunakan papan breadboard.
E. Servo Motor
sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor servo.
Gambar 3. 4 Servo Motor
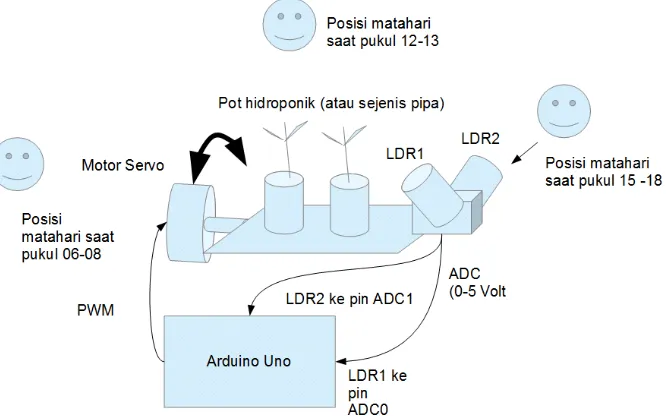
F. Desain Skematik Rangkaian
Dalam project ini digunakan Arduino Uno ATmega328, sensor LDR dan motor servo (dengan kemampuan rotasi 0 sampai 180 derajat) dengan desain seperti berikut.
Gambar 3.6 Perancangan Alat
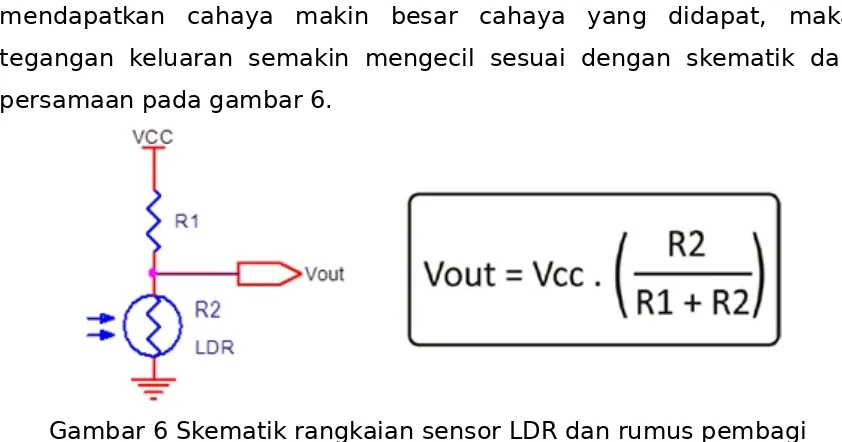
mendapatkan cahaya makin besar cahaya yang didapat, maka tegangan keluaran semakin mengecil sesuai dengan skematik dan persamaan pada gambar 6.
Gambar 6 Skematik rangkaian sensor LDR dan rumus pembagi tegangan
Untuk sumber tegangan LDR (5V) menggunakan pin D2 dan D3 dan didefinisikan pin tersebut sebagai luaran dan selalu bernilai HIGH (5v) didefinisikan dibagian fungsi setup(), sebaiknya tidak menggunakan pin D0 dan D1 jika untuk komunikasi data serial (untuk monitor tegangan luaran misalnya).
Untuk motor servo seperti pada gambar 7 pin data input (pulsa PWM) dihubungkan ke pin D8 dan untuk tegangan 5V melalui dari pin tegangan catu 5V, sangat dilarang menggunakan pin digital sebagai tegangan catu yang mengkonsumsi arus besar bahkan untuk motor DC atau servo, karena dapat menghasilkan induksi listrik yang bisa merusak pin digital MCU.
G. Rancangan Program
berintensitas lebih besar. Setiap siklus loop motor servo bergerak setiap derajat (dengan faktor penambahan 1 derajat setiap loop). Saat tercapai intensitas kedua sensor bernilai sama maka motor servo akan terhenti dan tidak bergerak. Untuk dicapai nilai luaran (dari pengukuran ADC0 dan ADC1 agar sama maka bisa dikalibrasi melalui potensio R1 dan R2 juga melalui faktor penambah atau pengurang dari program Arduino.
Berikut adalah listing lengkap dari program Arduino:
#define MAX_RESAMPLING 10 // resampling ADC
#define SERVO_PIN 22 // pin data input untuk servo
#define DEFAULTPOS 90 // sudut awal / posisi vertikal 0 derajat #define DELAYSERVO 15 // delay default setiap siklus pulsa PWM #define SUDUT_AWAL 90 // sudut awal di set ke 90 derajat
#define LANGKAH_ROTASI 5 // sudut rotasi setiap langkah per 5 derajat #include <Servo.h>
Servo myservo; // servo object untuk kontrol servo
int pos = 0; // variable store posisi servo
// kalibrasi offset pengukuran ADC1 & 2 (dari LDR1 &2) int offsetV1 = 20;
int offsetV2 = 0;
// ADC 10 bit = 1023 step = atau resolusi per step 5000mV / 1023 = 4,88 mV (dgn Vref default = 5V)
int tolerance1 = 100; // toleransi faktor 100 atau 100 * 4,88 mV = 488 mV selisih antara intensitas dari 2 LDR
static String LDR = "LDR"; // untuk print out tegangan yg terbaca
static String LDRCAL = "LDR CALIBRATED"; // untuk print out tegangan yg sudah terkalibrasi
myservo.attach(SERVO_PIN); // penempatan pin untuk data motor servo delay(100); // tundaan 100ms menunggu posisi servo mencapai sudut awal resetPos();
ldrValue1 = ldrValue1+ analogRead(A1); ldrValue2 = ldrValue2 + analogRead(A2); }
ldrValue1 = ldrValue1 /MAX_RESAMPLING; ldrValue2 = ldrValue2 /MAX_RESAMPLING;
//ldrValue1= analogRead(A1); //ldrValue2= analogRead(A2);
// print out the value you read:
Serial.println(LDR + "1 = " + ldrValue1 ); Serial.println(LDR + "2 = " + ldrValue2 );
Serial.println(LDRCAL + "1 = " + (ldrValue1 + offsetV1)); Serial.println(LDRCAL + "2 = " + (ldrValue2 + offsetV2));
delay(300); // delay in between reads for stability int selisih1 = ldrValue2-ldrValue1;
if (selisih1<0) selisih1 = selisih1*(-1); if (selisih1 > tolerance1) {
diinputkan bahasan pemrograman arduino agar dapat memproses inputan sinyal cahaya yang diterima oleh sensor LDR, sehingga mampu untuk menggerakkan motor servo.
Arduino memiliki bahasa pemrograman seperti bahasa pemrograman tingkat menengaha pada umumnya, struktur dasar dari bahasa pemrograman arduino terdiri dari dua bagian, yaitu :
void setup( )
fungsi setup( ) merupakan bagian inisialisasi yang dijalankan hanya di awal program, sedangkan loop() untuk mengeksekusi bagian program yang dijalankan secara berulang-ulang. Fungsi setup() digunakan untuk mendefinisikan mode pin atau mengawali komunikasi serial, dan fungsi ini wajib untuk diikutsertakan dalam program walaupun tidak ada statement yang dijalankan.
V. Evaluasi
Hasil evaluasi penelitian ini yaitu, menghasilkan sebuah alat yang mampu untuk mendeteksi keberadaan cahaya, motor servo dapat bergerak mengikuti arah sumber cahaya. Hasil pergerakan motor servo tersebut dapat memberikan intensitas cahaya yang mencukupi untuk tumbuhan dalam melakukan proses fotosintesis.
Perangkat yang sudah dibuat berdasarkan desain skematik pada bab III dapat di dilakukan analisa dan pengujian sebagai berikut:
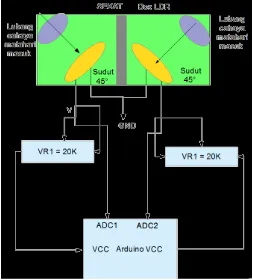
sumber cahaya berdasarkan intensitasnya (dalam eksperimen ini digunakan lampu senter atau led flash ponsel), bentuk diagram penempatan sensor diperlihatkan pada gambar 9.
Gambar 11 diagram boks rumah sensor LDR
Posisi sensor miring 45 derajat dipilih berdasarkan eksperimen dan analisa penulis, serta sejumlah referensi dari literatur. Cahaya masuk menjadi lebih fokus, dan antara LDR1 LDR2 dapat mengukur intensitas cahayanya tanpa saling ber interferensi karena faktor pemakaian sekat di antara dua sensor.
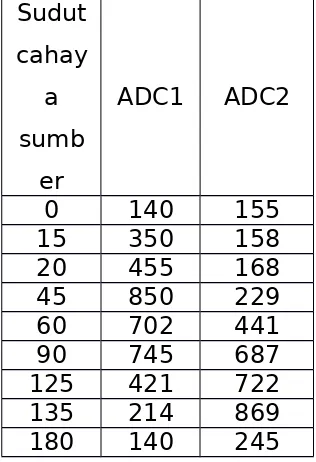
Tabel 1 Tegangan ADC1 dan ADC2 dengan variasi posisi sudut
Dari tabel 1 tampak saat sudut posisi sumber cahaya masih rendah (0-15 derajat) sensor LDR1 intensitas yang didapatkan cukup rendah, sehingga harus dikalibrasi menggunakan metode offet tambahan yaitu melalui konstanta tolerance. Saat selisih kedua nilai ADC belum tercapai tolerance maka servo belum bereaksi, untuk menghindari terjadinya reaksi dini (bergeraknya servo) dikarenakan tanaman dalam toleransi sudut 10 derajat tidak perlu diposisikan searah cahaya matahari, selain itu agar servo tidak terlalu sensitif jika terjadi sedikit perubahan intensitasnya.
Berdasarkan pengujian pada alat prototipe dalam penelitian ini maka diperoleh beberapa poin berikut.
lebih terpendar oleh awan) atau kondisi hujan perangkat sensor tidak bisa digunakan karena berisiko merusak sensor (perkabelan belum waterproof, berisiko merusak ADC atau LDR dan khususnya MCU).
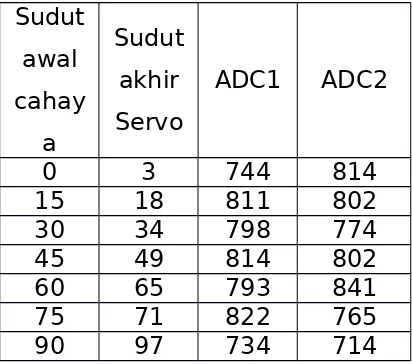
2. Akurasi sudut sangat berpengaruh pada kuaitas servo, disini digunakan MG90S yang berkemampuan rotasi dari 0 sampai 180 derajat dengan sudut presisi 1-5 derajat, karena pada sudut tertentu langkah servo menjadi lebih kurang akurat (sudut diatas 120 derajat) dengan presisi yang bervariasi antara 10-15 derajat. Hal ini mengakibatkan posisi tanaman cenderung kurang akurat dan tidak tepat sejajar dengan posisi matahari. Pada tabel 2 diperlihatkan data perolehan intensitas dan posisi servo telah tercapai kesetimbangan antara intensitas LDR1 dan LDR2 dengan variasi sudut posisi cahaya sumber.
Tabel 2 variasi sudut awal cahaya sumber, sudut servo akhir dan perolehan tegangan ADC1 ADC2
mengurangi akurasi pengukuran ADC yang berdampak pula pada ketepatan sudut servo.
VI. Kesimpulan
Dari pembahasan penelitian Bab IV maka dapat disimpulan sebagai berikut:
1. Sudut kemiringan sensor LDR yang masih bisa ditoleransi yaitu antara 35-50 derajat tergantung bentuk konstruksi rumah sensor, jenis dan akurasi sensornya, namun sebaiknya jangan posisi 90 derajat karena saat kondisi sumber cahaya lemah (mendung atau saat dini hari) servo menjadi tidak dapat menentukan sudut mana yang ber intensitas lebih besar.
2. Perangkat yang telah dibuat terbukti dapat meningkatkan perolehan intensitas cahaya, namun hanya berlaku saat kondisi cuaca cerah. Saat kondisi mendung, atau berawan cahaya cenderung terdifraksi dan homogen sehingga sensor tidak mendeteksi adanya perbedaan intensitas, berdampak servo tidak bergerak.
3. Jarak perkabelan yang terlalu panjang mengakibatkan perolehan tegangan ADC menjadi kurang akurat, selain itu karena tanpa penggunaan lensa untuk memfokuskan cahaya sumber mengakibatkan sistem kurang reaktif terhadap perbedaan cahaya saat sudut rendah (0-15 derajat,dan 140-180 derajat).
VII. Saran
Setelah penelitian ini dilakukan maka dapat diberi sejumlah saran diantaranya yaitu :
1. Sensor LDR sebaiknya memakai kontainer yang tahan air dan kedap cahaya, juga diperlukan lensa fokus untuk LDR agar sensor lebih peka terhadap intensitas sumber cahaya. Dan diperlukan pengujian lebih lanjut dalam kondisi cuaca mendung, betawan, hingga hujan.
2. Diperlukan pengujian lebih lanjut berbagai jenis LDR agar dapat diketahui jenis dan tipe LDR yang berkualitas baik dan lebih peka terhadap cahaya.
3. Konektor dan perkabelan sebaiknya yang berkualitas baik dan tidak berkarat, serta penggunaan kabel tidak terlalu panjang (maksimum 20 cm) untuk menghindari penurunan dan ketidakakuratan tegangan yang diukur ADC.
4. Diperlukan pengujian lebih lanjut berbagai jenis motor Servo agar dapat diketahui jenis dan tipe Motor yang berkualitas baik dan akurasi sudut rotasi agar tercapai posisi sudut yang lebih akurat.
VIII. Daftar Pustaka
Hasil, P., Skripsi, P., Elektro, J. T., Teknik, F., Brawijaya, U., Studi, P., … Arduino, B. (n.d.). PADA TANAMAN ANGGREK.
Program, M., Fisika, S., Program, D., & Fisika, S. (n.d.). OTOMATISASI PENGENDALIAN PENCAHAYAAN UNTUK TANAMAN SELADA ( Lactuca sativa L .) DENGAN SISTEM TANAM HIDROPONIK DI DALAM GREENHOUSE, 159–165.
Harris, D. (1988). Hydroponis- The Complete Guide to Gardening without Soil. London: New Holland Publishers Ltd.
Mattson, Neil. (2011). Greenhouse Lighting. New York: Cornell University
Othman, Al Junid, 2013, Performance Analysis of Dual-axis Solar Tracking System, IEEE International Conference on Control System, Computing and Engineering, Malaysia www.researchgate.net/profile/Syed_Al_Junid/publication/261206116_Performance_analysis_ of_dual-axis_solar_tracking_system/links/5763814e08aeab6e490aa748.pdf
Resh, H. M. (1998).Hydroponic Food Production 5th Ed.
Santa Barbara:Woodbridge Press Publ.
Yopi, Sukita. (2014). Pengendali Intensitas Cahaya, Suhu, dan Kelembapan pada Rumah Kaca dengan Metode PID. Bengkulu: Universitas Bengkulu.