TUGAS GEOMETRIK JALAN
PARAMETER PERENCANAAN GEOMETRIK JALAN
Oleh Kelompok 2
Nama Kelompok :
I Made Wisakananda Pradipta
(1204105051)
I Putu Bayu Adiyasa AS
(1204105052)
A.A. Gede Surya Lesmana
(1204105053)
TEKNIK SIPIL
FAKULTAS TEKNIK
UNIVERSITAS UDAYANA
BAB II
PARAMETER PERENCANAAN GEOMETRIK
JALAN
2.1 PENGERTIAN
Perencanaan geometrik adalah bagian dari perencanaan jalan dimana geometrik atau dimensi nyata jalan beserta bagian-bagiannya disesuaikan dengan tuntutan serta sifat-sifat lalu lintas. Melalui perencanaan geometrik ini perencana berusaha menciptakan sesuatu hubungan yang baik antara waktu dan ruang sehubungan dengan kendaraan yang bersangkutan, sehingga dapat menghasilkan efisiensi keamanan serta kenyamanan yang paling optimal dalam pertimbangan ekonomi yang paling layak.Perencanaan geometrik pada umumnya menyangkut aspek perencanaan jalan seperti lebar, tikungan, landai, jarak pandang dan juga kombinasi dari bagian-bagian tersebut. Perencanaan geometrik ini berhubungan erat dengan arus lalu lintas, sedangkan perencanaan konstruksi jalan lebih bersangkut paut dengan beban lalu lintas tersebut.
Dilihat dari sudut tahapan pembangunan, perencanaan geometrik merupakan fase lanjutan dari over all plan yang selanjutnya diikuti oleh fase pembangunan. Sedangkan tujuan akhirnya adalah menyediakan jalan standar tertinggi dan sesuai dengan fungsinya.
2.2 KENDARAAN RENCANA
radius putarnya) dipilih sebagai acuan dalam perencanaan geometrik jalan raya. Pengelompokan jenis kendaraan rencana yang relevan dengan penggunaannya, dibedakan menurut sumber & implementasinya sebagai berikut:
a. Geometrik Jalan Antar Kota
Pengelompokan kendaraan rencana untuk perencanaan geometrik jalan antar kota adalah sebagai berikut:
Kendaraan kecil : mobil penumpang
Kendaraan sedang : truk 2 as tandem, bus 2 as
Kendaraan besar : truk semi trailer
Dimensi masing-masing jenis kendaraan rencana tersebut, dijelaskan pada tabel 1.1.
Kategori
Kecil 130 210 580 90 150 420 730 780 Sedang 410 260 1210 210 240 740 128
0
1410
Besar 410 260 2100 120 90 290 140 0
1370
Tabel 1.1 Dimensi Kendaraan Rencana Untuk Jalan Antar Kota Sumber : Tata Cara Perencanaan Geometrik Jalan Antar Kota 1997
b. Geometrik Jalan Perkotaan
Pengelompokan kendaraan rencana untuk perencanaan geometrik jalan perkotaan adalah sebagai berikut:
Kendaraan kecil : mobil penumpang
Kendaraan sedang : unit tunggal truk/bus
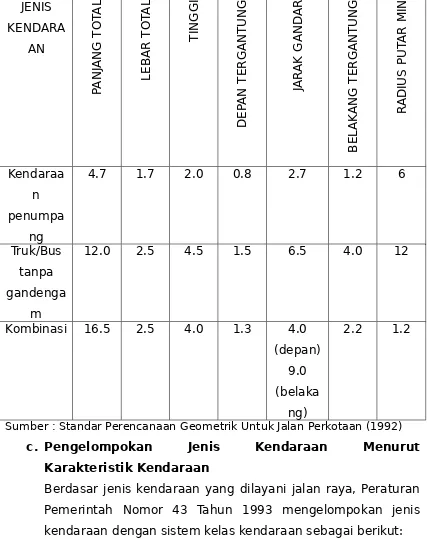
Dimensi masing-masing jenis kendaraan rencana tersebut, dijelaskan pada table 1.2.
Tabel 2.1 Dimensi Kendaraan Rencana Untuk Jalan Perkotaan (meter)
Kombinasi 16.5 2.5 4.0 1.3 4.0 (depan)
9.0 (belaka
ng)
2.2 1.2
Sumber : Standar Perencanaan Geometrik Untuk Jalan Perkotaan (1992)
c. Pengelompokan Jenis Kendaraan Menurut
Karakteristik Kendaraan
Berdasar jenis kendaraan yang dilayani jalan raya, Peraturan Pemerintah Nomor 43 Tahun 1993 mengelompokan jenis kendaraan dengan sistem kelas kendaraan sebagai berikut:
Kendaraan kelas II, yaitu kendaraan berukuran lebar ≤ 2.50 meter, panjang ≤ 18 meter dan muatan sumbu terberat (MST) ≤ 10 ton.
Kendaraan kelas IIIA, yaitu kendaraan berukuran lebar ≤ 2.50 meter, panjang ≤ 18 meter dan muatan sumbu terberat (MST) ≤ 8 ton.
Kendaraan kelas IIIB, yaitu kendaraan berukuran lebar ≤ 2.50 meter, panjang ≤ 12 meter dan muatan sumbu terberat (MST) ≤ 8 ton.
Kendaraan kelas IIIC, yaitu kendaraan berukuran lebar ≤ 2.10 meter, panjang ≤ 9 meter dan muatan sumbu terberat (MST) ≤ 8 ton.
d. Pengelompokan Jenis Kendaraan Menurut Indonesian Highway Capacity Manual (IHCM) 1997,
Berkaitan dengan tingkat pelayanan jalan (ruas jalan, simpang dan bundaran), IHCM 1997 mengelompokan jenis kendaraan sebagai berikut:
Kendaraan ringan (light vehicle : LV)
Kendaraan berat (heavy vehicle : HV)
Sepeda motor (motor cycle : MC)
2.3 KECEPATAN
Kecepatan adalah besaran yang menunjukan jarak yang ditempuh kendaraan dibagi waktu tempuh .Biasanya dinyatakan dalam km/jam. Kecepatan ini menggambarkan nilai gerak dari kendaraan . Perencanaan jalan yang baik tentu saja haruslah berdasarkan kecepatan yang dipilih dari keyakinan bahwa kecepatan tersebut sesuai dengan kondisi dan fungsi jalan yang diharapkan.
Berbagai macam jenis kecepatan yaitu :
a) Kecepatan bintik (Spot Speed) adalah kecepatan sesaat kendaraan pada titik/lokasi jalan
b) Kecepatan rata-rata ruang (Space Mean Speed) adalah kecepatan rata-rata kendaraan disepanjang jalan yang diamati
dengan :
Us = kecepatan rata – rata ruang (km/jam) t = waktu perjalanan (detik)
d = jarak (meter)
n = banyaknya kendaraan yang diamati
c) Kecepatan rata-rata waktu (Time Mean Speed) adalah kecepatan rata-rata yang menggambarkan kecepatan rata-rata dari seluruh kendaraan yang melewati satu titik pengamatan pada waktu tertentu
dengan :
Ut = kecepatan rata – rata waktu (km/jam) U = kecepatan kendaraan (km/jam)
n = jumlah kendaraan
d) Kecepatan rata-rata perjalanan (Average Travel Speed) dan kecepatan jalan. Waktu perjalanan adalah total waktu tempuh kendaraan untuk suatu segmen jalan yang ditentukan. Waktu jalan adalah total waktu ketika kendaraan dalam keadaan bergerak (berjalan) untuk menempuh suatu segmen jalan tertentu.
batas aman. 15 percentile speed adalah batas kecepatan minimum suatu kendaraan dimana kendaraan yang berjalan dengan kecepatan lebih rendah dari ini cenderung menjadi hambatan pada arus lalu lintas dan dapat menyebabkan kecelakaan.
2.5 KECEPATAN RENCANA
Kecepatan rencana adalah kecepatan maksimum yang diizinkan di sepanjang bagian tertentu pada jalan raya tersebut, jika kondisi yang beragam tersebut menguntungkan dan terjaga oleh keistimewaan perencanaan jalan, dalam arti tidak menimbulkan bahaya, inilah yang digunakan untuk perencanaan geometrik. Suatu kecepatan rencana haruslah sesuai dengan tipe jalan dan sifat lapangan. Kecepatan rencana merupakan faktor utama untuk menentukan elemen-elemen geometrik jalan raya.
Dipandang dari segi mengemudi, kecepatan rencana dinyatakan sebagai kecepatan yang memungkinkan seorang pengemudi berketrampilan sedang dapat mengemudi dengan aman dan nyaman dalam kondisi cuaca cerah, lalu lintas lengang tanpa pengaruh lain yang serius.
2.4.1KECEPATAN RENCANA LALU LINTAS
Kecepatan yang digunakan oleh pengemudi tergantung dari :
Pengemudi dan kendaraan yang bersangkutan
Sifat fisik jalan
Cuaca
Adanya gangguan dari kendaraan lain.
Dipandang dari segi pengemudi, kecepatan rencana dinyatakan sebagai kecepatan yang memungkinkan seorang pengemudi untuk mengemudikan kendaraan dengan aman dan nyaman
Dipandang dari kondisi lingkungan pada umumnya peran jalan raya dan karakteristik fisik kendaraan yang menggunakan jalan raya, kecepatan rencana maksimum 80 km/jam adalah layak bagi jalan raya tanpa pengawasan jalan masuk. Kecepatan rencana minimum 30km/jam merupakan volume lalu lintas rencana rendah. Kecepatan rencana 80–30 km/jam cocok untuk jalan kelas 1–5, untuk kondisi kelas 5 cocok untuk lalu lintas yang cukup rendah dan kondisi medan curam.
2.6VOLUME LALU LINTAS
Sebagai pengukur jumlah dari arus lalu lintas digunakan “Volume” Volume lalu lintas menunjukan jumlah kendaraan melintasi satu titik pengamatan dalam satuan waktu (hari,jam,menit)
Satuan volume lalu lintas yang umum dipergunakan sehubungan dengan penentuan jumlah dan lebar lajuar adalah :
1. Lalu lintas Harian Rata – Rata 2. Volume Jam Perencanaan 3. Kapasitas
1. Lalu lintas harian rata – rata
Lalu lintas harian rata –rata adalah volume lalu lintas rata-rata dalam satu hari. Dari cara memperoleh data tersebut dikenal 2 jenis Lalu lintas Harian Rata-rata Tahunan (LHRT) dan Lalu lintas Harian Rata-rata (LHR).
LHRT adalah jumlah llalu lintas kendarann rata-rata yang melewati satu jalur jalan selama 24 jam dan diperoleh dari data selama satu tahun penuh.
LHRT= Jumlah lalu lintas dalam 1 tahun 365
LHRT dinyatakan dalam SMP/hari/2 arah,atau kendaraan /hari/2 arah umtuk 2 jalur 2 arah, SMP/hari/1 arah atau kendaraan/hari/1 arah untuk jalan berlajur banyak dengan median.
2. Lalu lintas harian rata-rata (LHR)
LHR adalah hasil bagi jumlah kendaran yang diperoleh
LHR = jumlah lalu lintas selama pengamatan Lamanya Pengamatan
Data LHR ini cukup teliti jika:
1. Pengamatan dilakukan pada interval interval waktu yang cukup menggambarkan flukyuasi arus lalu lintas selama 1 tahun
2. Hasil LHR yang dipergunakan adalah harga rata-rata dari perhitungan LHR beberapa kali.
LHR atau LHRT untuk perencanaan jalan baru diperoleh dari analisa dat yang diperoleh dari survey asal dan tujuan serta vilume lalu lintas disekitar jalan tersebut.
3. Volume jam perencanaan (VJP)
LHR dan LHRT adalah volume lalu lintas dalam satu hari,merupakan volume harian ,sehingga nilai LHR dan LHRT itu tak dapat memberikan gambaran perubahan – perubahan yang terjadi pada berbagai jam dalam hari ,yang nilainya dapat bervariasi antara 0-100 % LHR.Oleh karena itsu tak dapat langsung dipergunakan dalm perencanaan geometric. Arus lalu lintas bervariasi dari jam ke jam berikutnya dalam satu hari ,maka sangat cocoklah jika volume lalu lintas dalam 1 jam dipergunakan untuk perencanaan dinamakan “Volume Jam Perencanaan (VJP)”
Vo;ume 1 jam yang dapat dipergunakan sebagai VJP haruslah sedemikian rupa sehingga:
1. Volume tersebut tidak boleh terlalu sering terdapat pada distribusi arus lalul lintas setiap jam untuk periode satu tahun.
3. Volume tersebut tidak boleh mempunyai nilai yang sangat besar, sehingga akan mengakibatkan jalan akan menjadi lenggang dan biayanya pun mahal.
2.7TINGKAT PELAYANAN JALAN
Lebar dan jumlah lajur yang dibutuhkan tidak dapat direncanakan dengan baik walaupun VJP/LHR telah ditentukan. Hal ini disebabkan oleh karena tingkat kenyaman dan keamanan yang akan diberikan oleh jalan rencana belum ditentukan . Lebar lajur yang dibutuhkan akan lebih lebar jika pelayanan dari jalan yang diharapkan lebih tinggi.Kebebasan bergerak yang dirasakan oleh pengemudi akan lebih baik pada jalan –jalan dengan kebebasan samping yang memadai, tetapi hal tersebut tentu saja menutut daerah manfaat jalan yang lebih lebar pula.
Lebar suatu keadaan volume lalu lintas yang rendah ,pengemudi akan merasa lebih nyaman mengendarai kendaraan dibandingkan jika dia berada pada daerah tersebut dengan volume lalu lintas yang lebih besar. kenyamanan akan berkurang sebanding dengan bertambahnya volume lalu lintas .dengan perkataan lain rasa nyaman dan volume arus lalu lintas tersebut berbanding terbalik. Tetapi kenyamanan dari kondisi arus lalu lintas yang ada tak cukup hanya digambarkan dengan volume lalu lintas tanpa disertai data kapasitas jalan ,dan kecepatan pada jalan tersebut.
Sebagai contoh I, jalan dengan kapasitas jalan 2000 kendaraan / jam mempunyai volume 1000 kendaraan /jam .Pengemudi akan mearasakn lebih nyaman mengendarai kendaraan pada jalan pertama dibandingkan dengan jalan kedua .Atau, tingkat pelayanan jalan pertama lebih baik dari jalan kedua.
Jika V/C jalan I = 1000/2000 = 0,5 V/C jalan II = 1000/1500 = 0,67 V/C jalan I < V/C j alan II
Highway Capasity Manual membagi tingkat kenyamanan/pelayanan jalan atas 6 keadaan sbb:
Tingkat pelayanan (tergantung – arus)
1. Tinkat pelayanan A dengan ciri-ciri:
Arus lalu luintas bebas tanpa hambatan
Volume dan kepadatan lalu lintas rendah
kecepatan kendaraan merupakan pilihan pengemudi
2. Tingkat pelayanan B
Arus lalu lontas stabil
Kecepatan mulai dipengaruhi oleah keadaan lalu lintas, tatapi tetap dapat dipilih sesuai kehendak pengemudi
3. Tingkat pelayanan C
Arus lalu lintas masih stabil
Kecepatan perjalanan dan kebebasan bergerak sudah dipengaruhi oleh beasarnya volume lalu lintas sehingga pengemudi tidak dapat lagi memilih kecepatan yang diinginkannya.
4. Tingkat pelayanan D,
Arus lalu lintas sudah mulai tidak stabil
Perubahan volume lalu lintas sangat mempengaruhi besarnya kecepatan perjalanan.
5. Tingkat pelayanan E,
Arus lalu lintas sudah tidak stabil
Volume kirs-kira sama dengan kapasitas
Sering terjadi kemacetan
Arus lalu lintas tertahan pada kecepatan rendah
Sering kali terjadii kemacetan
lalu lintas rendah.
Batasan –batasan nilai dari setiap tingkat pelayanan jalan dipengaruhi oleh fungsi jalan dan dimana jalan tersebut berada . Jalan Tol yang berada diluar kota tentu saja dikehendaki dapat melayani kendaraan dengan keacepatan tinggi dan memberikan ruang bebas bergerak selama umur rencana jalan terswbut.Jalan kolrktor sekunder yang berada di dalam kota dapat saja direncanakan untuk tingkat pelayanan E pada akhir umur rencana dan dengan kecepatan yang lebih rendah daripada jalan antar kota.
2.8 JARAK PANDANGAN
Keamanan dan kenyamanan pengemudi kendaraan untuk dapat melihat dengan jelas dan menyadari situasinya pada saat mengemudi, sangat tergantung pada jarak yang dapat dilihat dari tempat kedudukannya.Panajang jalan didepan kendaraan yang masih dapat dilhat dengan jelas diukur dari titik kedudukan pengemudi,disebut Jarak pandangan.
Jarak padangan berguna untuk :
1. Menghindari terjadinya tabrakan yang dapat membahayakan kendaraan dan manusia akibat adanya benda yamg berukuran yang sangat besar ,kendaraan yang sedang berhenti ,pejalan kakai,atau hewan-hewan pada lajur jalannya .
3. Menambah efisiensi jalan tersebut, sehingga volume pelayanan dapat dicapai maksimal.
4. Sebagai pedoman bagi pengatur lalu lintas dalam menempatkan rambu rambu lalu lintas yang diperlukan pada setiap segmen jalan
Dilihat dari kegunaannya jarak pandangan dapat dibedakan atas: 1. Jarak pandangan henti : jarak pandangan yang dibutuhkan untuk menghentikan kendaraannya.
2. Jarak pandangan menyiap : jarak pandangan yang dibutuhkan untuk dapat menyiap kendaraan lain yang berada pada lajur jalannya dengan menggunakan lajur untuk arah yanh berlawanan.
2.8.1 JARAK PANDANG HENTI
Jarak pandangan henti adalah jarak yang ditempuh pengemudi untuk dapat menghentikan kendaraannya, Guna memberikan keamanan pada pengemudi kendaraan , maka pada setiap panjang jalan haruslah dipenuhi paling sedikit jarak pandangan sepanjang jarak pandangan henti meinimum.
Jarak pandangan henti minimum adalah jarak pengemudi untuk menhentikan kendaraan yang bergerak setelah melihat adanya rintangan pada lajur jalannya .Rintangan itu dilihata dari tempat duduk pengemudi dan setelah menyadari adanya rintangan ,pengemudi mengambil keputusan untuk berhenti.
cuaca,penerangan,dan kondisi fisik pengemudi, Untuk perencanaan AASHTO 1990 mengambil wktu PIEV sebesar 1,5 detik.
Setelah pengemudi mengambil keputusan untuk menginjak rem, maka pengemudi membutuhkan waktu sampai dai menginjak pedal rem.Rata rata pengemudi membutuhkan waktu 0,5 sampai 1 detik. Sehingga total waktu yang dibutuhkan daria saat dia melihat rintangan sampai menginjak pedal rem,disebut sebagai waktu reaksi adalah 2,5 detik.
Gambar 2.8.1.1 Jarak Pandang Henti
Besarnya jarak PIEV dapat ditentukan dengan rumus: vt
dp0,278
dp = jarak PIEV (meter)
V = kecepatan rencana (km/jam) t = waktu PIEV (detik)
Dalam penentuan jarak mengerem, gesekan antara rem dan tromolnya atau gaya mekanisme rem dianggap cukup besar. Untuk daerah datar, jarak mengerem dapat ditentukan dengan rumus :
fn
dr = jarak mengerem (meter) V = kecepatan awal (km/jam)
fn = koefisien gesekan normal antara ban dengan permukaan gesekan
Untuk daerah-daerah dengan kelandaian tertentu digunakan rumus : sedangkan tanda (+) untuk pendakian
Jadi rumus untuk jarak pandang henti adalah :
dr
D = jarak pandang henti minimum (m)
V = kecepatan rencana
t = waktu tanggap (detik) = 2,5 detik g = percepatan grafitasi = 9,81 m / detik2 f = koefisien gesekan membujur = 0,3 – 0,4
sepanjang jalan raya sekurang–kurangnya harus memenuhi jarak yang diperlukan oleh rata–rata pengemudi atau kendaraan untuk berhenti.
Jarak pandangan henti minimum untuk kecepatan tertentu dapat dilihat pada tabel berikut :
Kecepatan Rencana
(km/jam)
80 60 50 40 30 20
Jarak Pandang Henti Minimum (m)
120 75 55 40 25 15
2.8 JARAK PANDANGAN MENYIAP
Jarak pandang menyiap adalah panjang bagian suatu jalan yang diperlukan oleh pengemudi suatu kendaraan untuk melakukan gerakan menyiap kendaraan lain yang lebih lambat dan aman.
Faktor – faktor yang mempengaruhi :
- Kecepatan kendaraan yang bersangkutan
Kebebasan
Reaksi
Kecepatan pengemudi
Besar kecepatan maksimum kendaraan
JARAK PANDANGAN MENYIAP untuk jalan 2 lajur 2 arah Pada umumnya untuk jalan 2 lajur 2 arah kendaraan dengan kecepatan tinggi sering mendahului kendaraan lain dengan kecepatan yang lebih rendah sehingga pengemudi tetap dapat mempertahankan kecepatan sesuai dengan yang diinginkannya. Gerakan menyiap dilakukan dengan mengambil lajur jalan yang diperuntukan untuk kendaraan dari arah yang berlawanan .jarak yang dibutuhkan pengemudi sehingga dapat melakukan gerakan menyiap dengan aman dan dapat melihat kendaraan dari arah depan dengan bebas dinamakan jarak pandangan menyiap.
menyiap suatu kenaraan dengan sempurna dan aman berdasarkan asumsi yang diambil. Apabila dalam suatu kesempatan dapat menyiap dua kendaraan sekaligus ,tidaklah merupakan dasar dari peencanaan suatu jarak pandangan menyiap total.
Jarak menyiap pandangan menyiap standar pada jalan dua lajur 2 arah
dihitung berdasarkan beberapa asumsi terhadap sifat arus lalu lintas Yaitu:
1. Kendaraan yang akan disiap harus mempunyai kecepatan yang tetap.
2. Sebelum melakukan gerakan menyiap, kendaraan harus mengurangi kecepatannya dan mengikuti kendaraan yang akan disiap dengan kecepatan yang sama.
3. Apabila kendaraan sudah berada pada lajur untuk menyiap, maka pengemudi harus mempunyai waktu untuk menentukan apakah gerakan menyiap dapat diteruskan atau tidak.
4. Kecepatan kendaraan yang menyiap perbedaan sekitar 15 km/jam dengan kecepatan kendaraan yang disiap pada waktu melakukan gerakan menyiap.
5. Pada saat kendaraan yang menyiap telah berada kembali pada lajur jalannya, maka harus tersedia cukup jarak dengan kendaraan yang bergerak dari arah yang berlawanan.
Gbr. Proses gerakan menyiap pada jalan 2 lajur 2 arah TAHAP PERTAMA
d1
1/3 d2
d1 1/3d2 2/3d2
d3 d4
d2
d
Besar atau panjangnya jarak pandang menyiap dapat dihitung berdasarkan rumus berikut :
4 3 2
1 d d d d
D Dimana :
D = jarak pandang menyiap (m)
d1 = jarak pandang PIEV (Percepatan, Intellection, Emotion, Volition ) = 0,278 t1 (V - m + (at1/2))
d2 = jarak yang ditempuh dalam penyiapan = 0,276 V t2
d3 = jarak bebas = (30 – 100)m
d4 = jarak yang ditempuh dari arah lawan = 2/3 d2 Catatan :
V = kecepatan rata–rata kendaraan menyiap
t1 = waktu PIEV
m = perbedaan kecepatan kendaraan yang disiap dan menyiap = 15 km/ jam
t2 = waktu kendaraan menyiap berjalan dijalan kanan
Jarak pandangan menyiap secara umum dibagi 2 :
Jarak menyiap minimum : Dm = d2 + d3 + d4
550 350 250 150 150 100
Jarak pandang
Misal ada masalah jalan penghubung antar kota sempit dan sekitarnya pemukiman penduduk, bagaimana solusinya? Jawaban :
Jalan harus diperlebar dengan menggunakan lahan dari rumah mas. Dilakukan pembebasan lahan.
Dosen :
Harus buat jalan baru, memakai system satu arah dengan jalan terdekat agar kelancaran bisa dipertahankan.
Pertanyaan 2
Nama: Gunggus Kresna Nim : 1204105067
Batas kecepatan tiap jalan siapa yang menentukan? Jawaban :
Perencana jalan menentukan dengan tipe jalan serta polisi Dosen :
Pertanyaan 3 Nama: Agus Putra Nim : 1204105050
Bagaimana cara menyesuaikan kecepatan rencana dengan tipe jalan?
Kenapa jarak pandang menyiap digunakan pada jalan 2 arah tanpa median?
Jawaban :
Tergantung dengan tipe jalannya seperti apa yang akan dibuat baru menyesuaikan kecepatan rencana.
Karena jarak pandang menyiap standar pada 2 lajur 2 arah dihitung berdasarkan beberapa asumsi terhadap sifat arus lalu lintasnya. Dimana pada umumnya untuk jalan 2 lajur 2 arah kendaraan dengan kecepatan tinggi sering mendahului kendaraan lain dengan kecepatan rendah sehingga pengemudi tetap dapat mempertahankan kecepatan sesuai dengan yang diinginkannya.
Dosen :
Menentukan kecepatan jalan yang ditentukan oleh tipe jalan, apakah datar atau berbukit. Dalam merencanakan suatu jalan, harus direncanakan sepenuhnya
Pertanyaan 4 Nama: Sumekar Nim : 1204105083
Apa yang dimaksud radius putar?
Apakah sepeda motor tidak termasuk kendaraan rencana? Jawaban :
Panjang kendaraan untuk menentukan tempat parker.
Tinggi kendaraan untuk mengukur ketinggian maksimum underpass, dan plang jalan.
Contoh yang baik untuk radius putar itu seperti U turn di underpass.
Pertanyaan 5 Nama:
Nim : 1204105095
Menurut kami dengan perbandingan 0,5 jalan sudah berjalan dengan baik.
Dosen :
Perbandingan batasnya 0,7 lebih sedikit saja akan menimbulkan kemacetan.