BAB II
DASAR TEORI
2.1 Alas Kaki Dalam Ergonomis
Saat seseorang memakai sepatu maupun alas kaki lainnya, kaki ditopang oleh
struktur sepatu. Oleh karena itu, alas kaki harus dirancang dengan baik agar dapat
mengakomodasi biomekanika yang terjadi. Perancangan desain alas kaki yang baik
harus mempertimbangkan permukaan tanah, otot telapak kaki mana yang bekerja
paling berat dan lain-lain. Semua variabel yang terkait harus dipertimbangkan untuk
merancang alas kaki yang ergonomis. Alas kaki yang baik akan mengakomodasi
gerakan supination dan pronation dengan baik. Untuk mencapainya, sepatu
olahraga khususnya lari, harus memiliki sole yang baik untuk meredam pengaruh
gaya dari eksternal sepatu ke kaki. Karena beban gaya yang ditopang pada tumit 3
kali berat badan saat berlari[1].
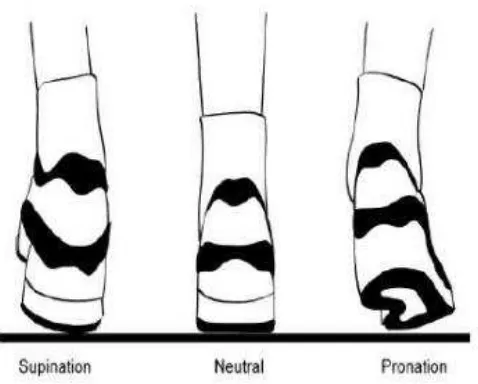
Saat bertelanjang kaki, sesorang dengan leluasa berlari. Namun kaki tidak
dapat meredam tekanan saat telapak kaki menyentuh permukaan. Kemampuan kaki
dalam meredam disebut dengan pronation (gambar 2.1). Jika memakai sepatu
olahraga, tekanan dapat diredam lebih baik karena sepatu memiliki cushion atau
Gambar 2.1 Gerakan Kaki Saat Melakukan Aktifitas
Forefoot atau telapak kaki depan adalah bagian dari telapak kaki yang
fleksibilitasnya tinggi. Bagian forefoot adalah bagian yang paling sering terjadi
abduksi maupun aduksi. Sepatu olahraga yang baik dapat membuat kaki bergerak
bebas seperti biasa tanna terhalang atau terbebani bahkan menghambat
biomekanika kaki. Karena bentuk forefoot adalah asimetris, maka diperlukan
bentuk rancangan yang tepat untuk meningkatkan performa.
Karena pergerakan kaki begitu kompleks saat melakukan kegiatan olahraga
dan aktifitas yang lainnya, perkembangan desain sepatu olahraga terus dilakukan
untuk mencapai tingkat performa seseorang yang maksimal. bentuk dari sebuah
sepatu harus disesuaikan dengan kaki pemakainya. Selain bentuk, material yang
digunakan harus tepat dan nyaman dipakai. Sirkulasi udara, ukuran sepatu,
ketebalan, sudut yang diakomodasi dan segala sesuatu yang terkait dalam
2.2 Elektromiografi (EMG)
Electromyography (EMG) adalah proses merekam aktivitas elektrik dari otot,
untuk menentukan apakah sedang melakukan kontraksi atau tidak[2]. Fungsi otot
sangat berperan penting dalam dalam setiap aktivitas manusia, misalnya dalam
bekerja, berolah raga, belajar bahkan tidur tidak terlepas dari kerja otot. Semakin
besar otot mengeluarkan tenaga maka frekuensinya akan semakin besar. Sinyal
EMG mempunyai range frekuensi pada energi dominan antara 20 – 500Hz, dengan
amplitudo antara 0 – 10 mV. Sebagian besar perangkat elektronika ini merupakan
perangkat elektronika dengan sinyal lemah. Perangkat elektronika dengan sinyal
lemah ini diantaranya banyak terdapat pada instrumentasi medis.
Beberapa instrumentasi medis ini membutuhkan filter untuk melewatkan
sinyal dengan rentang frekuensi tertentu [3]. Penelitian tentang EMG
memanfaatkan sinyal elektrik yang ada dalam tubuh manusia agar dapat digunakan
sebagai input kendali suatu sistem yang dalam hal ini mengambil sinyal-sinyal
EMG hasil dari aktivitas otot yang mengandung informasi tentang keadaan otot
tersebut. Untuk menegtahui data yang keluar dari sinyal otot dapat dilakukan
interface dengan software LabVIEW. Electromyograph (EMG) yang merupakan
bagian dari biomedical engineering [4]. EMG berguna untuk menegakkan
diagnosis penyakit sistem saraf perifer. Elektromigrafi (EMG) merupakan evaluasi
dan kajian otot berdasarkan pendeteksian aktivitas elektrik pada otot. Aktivitas
elektrik ini terjadi sebelum otot berkontraksi, kemudian aktivitas ini dikirim oleh
Pemahaman sinyal myoeletric sangat bergantung pada fungsi dan anatomi
sistem saraf. Otot rangka terdiri dari sel otot yang tersusun secara paralel yang
membentuk serat otot. Setiap otot memiliki sistem rangsang untuk menangkap
aktivitas elektrik. Namun dalam mengkaji bagaimana sinyal myoelectric dihasilkan
oleh aktivitas elektrik perlu dipahami mengenai saraf yang mentransmisikan perintah
menuju motor. Sistem saraf terdiri dari kumpulan bagian fungsional yang disebut
motor units (MU). Aktivitas elektrik ini dapat dideteksi menggunakan cara yang
sederhana yaitu menggunakan elektroda.
2.3 Elektroda Permukaan
Elektroda permukaan digunakan untuk menangkap MUAP atau sinyal
myoelectric. MUAP yang ditangkap sangat banyak karena elektroda diletakkan
pada permukaan kulit. Sinyal dengan amplitudo besar didapatkan pada bagian serat
otot yang dekat dengan elektroda.
Deteksi sinyal myoelectric dilakukan dengan elektroda tertentu. Elektroda
yang ditempel di permukaan kulit akan bersentuhan atau menempel pada otot.
Elektroda harus dibuat dari bahan yang aman dan tidak beracun bagi subjek.
Elektroda juga dibuat dari bahan yang tidak mudah mengalami polarisasi saat arus
listrik mengalir pada elektroda. Silver cloride (AgAgCl) merupakan elektroda
sensor.
Besarnya sinyal myoelectric bergantung pada posisi elektroda pada
permukaan kulit. Sensor elektroda pada kulit merupakan sensor yang dapat
digunakan untuk membantumendeteksi sinyal biolistrik yang dikeluarkan tubuh
manusia melalui kulit. Sensor tersebut dibuat dari bahan Ag│AgCl. Untuk
mendapatkan kontak listrik dalam penggunaannya pada sensor ini terdapat pasta
elektrolit yang terletak diantara elektroda dengan kulit [5].
Tiga elektroda digunakan dalam pendeteksian sinyal myoelectric, dua
elektroda dihubungkan pada input dengan impedansi tingga dan elektroda ketiga
sebagai ground yang diletakkan pada input dengan impedansi rendah. Mode deteksi
dilakukan dalam dua cara yaitu monopolar dan bipolar. Deteksi monopolar hanya
melibatkan satu elektroda aktif dan memberikan informasi mengenai perubahan
potensial pada daerah deteksi. Metode deteksi ini mengharuskan elektroda kedua
diletakkan pada daerah aktif seperti pergelangan tangan atau kaki. Deteksi bipolar,
dua elektroda diletakkan pada jarak tertentu sehingga terjadi beda potensial diantara
kedua elektroda. Beda potensial ini menghilangkan noise sehingga diperoleh sinyal
Gambar 2.3 Deteksian Monopolar
Gambar 2.4 Deteksian Bipolar
2.3.1 Jenis Elektroda
Terdapat dua jenis elektroda yang dapat digunakan dalam mendeteksi sinyal
myoelectric yaitu invasive electrode dan non-invasive electrode. Invasive electrode
merupakan elektroda berbentuk jarum dan cara penggunaanya dengan
menusukkanya ke dalam otot. Non-invasive electrode merupakan elektroda yang
banyak digunakan karena sifatnya yang tidak merusak subjek. Contoh noninvasive
electrodes adalah elektroda permukaan AgAgCl.
Gambar 2.5 Elektroda Permukaan AgAgCl
2.3.2 Penempatan Elektroda Pada Permukaan Kulit
Sebelum elektroda ditempelkan pada permukaan kulit maka dibutuhkan
langkah pembersihan pada permukaan kulit agar jaringan kulit mati dan rambut
pada permukaan kulit tidak mempengaruhi elektroda saat menangkap sinyal.
Teknik yang dapat dilakukan untuk membersihkan permukaan kulit adalah dengan
memanfaatkan alkohol dan melakukan pencukuran rambut pada permukaan kulit.
Elektroda diletakkan secara paralel terhada serabut otot. Posisi terbaik dapat dipilih
pada saat otot mengalami fase kontraksi. Peletakan elektroda sebaiknya berjarak
2.4 Otot Kaki Manusia
Kekuatan dari sebuah otot umumnya diperlukan dalam melakukan aktifitas.
Semua gerakan merupakan hasil dari adanya peningkatan tegangan otot sebagai
respon motorik.18 Kekuatan otot dapat digambarkan sebagai kemampuan otot
menahan beban berupa beban eksternal (external force) maupan beban internal
(internal force). Kekuatan otot sangat berhubungan dengan sistem neuromuskuler
yaitu seberapa besar kemampuan sistem saraf mengaktifasi otot untuk melakukan
kontraksi, sehingga semakin banyak serat otot yang teraktifasi, maka semakin besar
pula kekuatan yang dihasilkan otot tersebut[6].
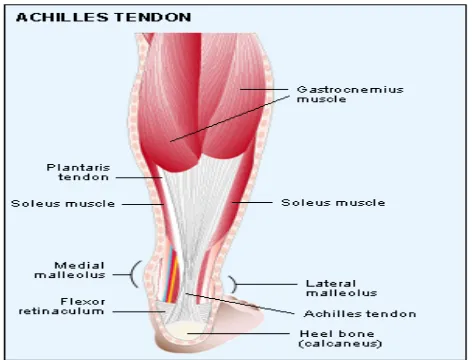
Kaki manusia merupakan bagian yang luar biasa kompleks dalam tubuh.
Menyerap dan mendistribusikan ratusan Pon tekanan dengan setiap langkah yang
diambil seseorang. Bahkan cedera ringan pada kaki dapat mempengaruhi
keseimbangan seseorang, postur, dan keselarasan tulang belakang. Kaki dibutuhkan
setiap hari untuk dapat berjalan tegap, anatomi kaki terdiri dari 26 tulang, 33 sendi,
dan ratusan tendon, ligamen, dan otot-otot yang saling berhubungan.
Anatomi kaki biasanya digambarkan dalam hal kaki depan, pertengahan kaki,
dan kaki belakang. Kaki depan dapat digambarkan sebagai terdiri dari lima jari kaki
dan lima tulang. Empat dari jari-jari kaki mengandung masing-masing tiga tulang,
yang dikenal sebagai falang, sedangkan jempol kaki berisi dua falang. Lima tulang
panjang melekat pada falang melalui sendi, dan terdiri dari anatomi kaki, juga
disebut dengan metatarsus. Tulang-tulang pertengahan kaki, seperti balok,
navicular, dan tiga tulang berbentuk baji, itu membentuk lengkungan kaki. Otot
yang menghubungkan pertengahan kaki ke kaki belakang dan depan. Kerusakan
tulang pertengahan kaki adalah penyebab dari cedera yang umum disebut kaki
sebagai pes planus atau fallen arch. Anatomi kaki adalah sedemikian rupa sehingga
memiliki tiga lengkungan, dua dari ini yang memanjang dan yang satunya
melintang.
Otot-otot, ligamen, dan tendon yang ditemukan dalam anatomi kaki disusun
dalam cara yang mirip dengan sebuah tali yang sangat rumit dan sistem katrol.
Fitur-fitur ini ditemukan di sisi kaki, di dalam kaki, dan baik di luar maupun di
dalam sendi tertentu. Setiap langkah yang diambil seseorang menyebabkan tulang,
sendi, otot, ligamen, dan tendon untuk terlibat dalam proses memberi dan
menerima. Anatomi kaki adalah sedemikian rupa sehingga semua elemen bekerja
sama, dengan tujuan tunggal memungkinkan seseorang untuk menjadi dapat
2.5 Arduino
Arduino didefinisikan sebagai sebuah platform elektronik yang open source,
berbasis pada sofwtare dan hardware yang fleksibel dan mudah digunakan, yang
ditujukan untuk para seniman, desainer, hobbies, dan setiap orang yang tertarik
dalam membuat objek atau lingkungan yang interaktif [7].
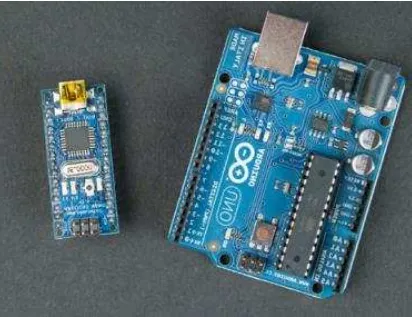
Nama Arduino di sini tidak hanya dipakai untuk menamai papan
rangkaiannya saja, tetapi juga untuk menamai bahasa dan software
pemrogramannya, serta lingkungan pemrogramannya atau IDE-nya (IDE =
Integrated Development Environment). Gambar 2.5 menujukkan tampilan dari
beberapa Arduino.
Kelebihan Arduino dari platformhardware mikrokontroler lainnya adalah:
1. IDE Arduino merupakan multiplatform, yang dapat dijalankan di berbagai sistem
operasi, seperti Windows, Macintosh, dan Linux.
2. IDE Arduino dibuat berdasarkan pada IDE Processing, yang sederhana sehingga
mudah digunakan.
3. Pemrograman Arduino menggunakan kabel yang terhubung dengan port USB,
bukan port serial. Fitur ini berguna karena banyak komputer yang sekarang ini tidak
memiliki port serial.
4. Arduino adalah hardware dan software open source.
5. Biaya hardware cukup murah.
6. Proyek Arduino ini dikembangkan dalam lingkungan pendidikan, sehingga bagi
pemula akan lebih cepat dan mudah mempelajarinya.
7. Memiliki begitu banyak pengguna dan komunitas di internet yang dapat membantu
setiap kesulitan yang dihadapi.
2.5.1 Bahasa Pemrograman Arduino
Arduino merupakan perangkat yang berbasiskan mikrokontroler. Perangkat
lunak merupakan komponen yang membuat sebuah mikrokontroler dapat bekerja.
Arduino akan bekerja sesuai dengan perintah yang ada dalam perangkat lunak yang
ditanamkan padanya. Bahasa pemrograman Arduino menggunakan bahasa
2.5.1.1Struktur
Setiap program dalam Arduino terdiri dari dua fungsi utama yaitu setup() dan
loop(). Fungsi digambarkan sebagai kumpulan kode yang ditujukan untuk
melaksanakan tugas tertentu dan kode tersebut akan dijalankan ketika nama fungsi
tersebut dipanggil di dalam program[8]. Instruksi yang berada dalam fungsi setup()
dieksekusi hanya sekali, yaitu ketika Arduino pertama kali dihidupkan.
Biasanya instuksi yang berada pada fungsi setup() merupakan konfigurasi
dan inisialisasi dari Arduino. Instruksi yang berada pada fungsi loop() dieksekusi
berulang-ulang hingga Arduino dimatikan (catu daya diputus). Fungsi loop()
merupakan tugas utama dari Arduino. Jadi setiap program yang menggunakan
bahasa pemrograman Arduino memilliki struktur yang ditunjukkan pada Gambar
2.8
Program pada Gambar 2.8 dapat dianalogikan dalam bahasa C seperti ditunjukkan
pada Gambar 2.9
Gambar 2.9 Analogi Struktur Umum Pemrograman Arduino
2.5.1.2Konstanta
Konstanta adalah variabel yang sudah ditetapkan sebelumnya dalam bahasa
pemrograman Arduino. Konstanta digunakan agar program lebih mudah untuk
dibaca dan dimengerti. Konstanta dibagi menjadi 3 kelompok yaitu:
1. Konstanta yang digunakan untuk menunjukkan tingkat logika (konstanta Boolean),
yaitu true dan false.
2. Konstanta untuk menunjukkan keadaan pin, yaitu HIGH dan LOW.
3. Konstanta untuk menunjukkan fungsi pin, yaitu INPUT, INPUT_PULLUP, dan
OUTPUT.
Konstanta yang digunakan untuk menunjukkan benar atau salah dalam
bahasa pemrograman Arduino adalah true dan false. False didefinisikan sebagai 0
(nol). True sering didefinisikan sebagai 1(satu), namun true memiliki definisi yang
lebih luas. Setiap integer yang bukan nol adalah true dalam pengertian Boolean.
Ketika membaca atau menulis ke sebuah pin digital, terdapat hanya dua
nilai, yaitu HIGH dan LOW. HIGH memiliki arti yang berbeda tergantung dengan
pinMode(), mikrokontroler akan melaporkan nilai HIGH jika tegangan yang ada
pada pin tersebut berada pada tegangan 3 volt atau lebih.
Ketika sebuah pin dikonfigurasi sebagai masukan dan kemudian dibuat
bernilai HIGH dengan fungsi digitalWrite(), maka resistor pull-up internal dari chip
ATmega akan aktif, yang akan membawa pin masukan ke nilai HIGH, kecuali pin
tersebut ditarik (pull-down) ke nilai LOW oleh rangkaian dari luar. Ketika pin
dikonfigurasi sebagai keluaran dengan fungsi pinMode() dan diatur ke nilai HIGH
dengan fungsi digitalWrite(), maka pin berada pada tegangan 5 volt.
Untuk mengkonfigurasi fungsi pin pada Arduino digunakan konstanta
INPUT, INPUT_PULLUP, dan OUTPUT. Pin Arduino yang dikonfigurasi sebagai
masukan dengan fungsi pinMode() dikatakan berada dalam kondisi berimpedansi
tinggi. Pin yang dikonfigurasi sebagai masukan memiliki permintaan yang sangat
kecil kepada rangkaian yang di-sampling-nya, setara dengan sebuah resistor 100
Megaohm dipasang seri dengan pin tersebut. Chip ATmega pada Arduino memiliki
resisitor pull-up internal (resistor yang terhubung ke sumber tegangan secara
internal) yang dapat digunakan. Untuk menggunakan resistor pull-up internal ini
kita menggunakan konstatnta INPUT_PULLUP pada fungsi pinMode(). Pin yang
dikonfigurasi menjadi sebuah keluaran dikatakan berada dalam kondisi
berimpedansi rendah.
2.5.1.3 Fungsi Masukan dan Keluaran Digital
Arduino memiliki 3 fungsi untuk masukan dan keluaran digital pada
mengkonfigurasi pin tertentu untuk berfungsi sebagai masukan atau keluaran.
Sintaks untuk fungsi pinMode() ditunjukkan pada Gambar 2.10
Gambar 2.10 Fungsi Sintaks pinMode
Fungsi digitalWrite() berfungsi untuk memberikan nilai HIGH atau LOW
suatu digital pin. Sintaks untuk fungsi digitalWrite() ditunjukkan pada Gambar 2.11
Gambar 2.11 Fungsi Sintaks digital Write
Fungsi digitalRead() bertujuan untuk membaca nilai yang ada pada pin
Arduino. Sintaks untuk fungsi digitalRead() ditunjukkan pada Gambar 2.12
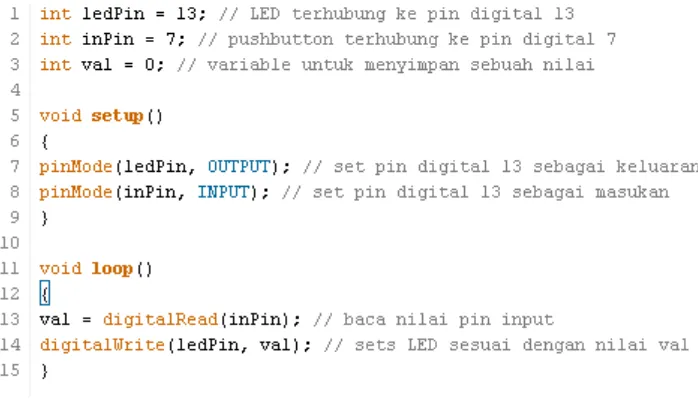
Beberapa contoh penggunaan sintaks tersebut dapat diimplementasikan
pada contoh penggunaan fungsi masukan dan keluaran digital dalam sebuah
program yang ditunjukkan pada Gambar 2.13
Gambar 2.13 Implementasi Sintaks pada Program Arduino
2.6 Pengenalan LabVIEW
LabVIEW adalah sebuah software pemograman yang diproduksi oleh
National instruments dengan konsep yang berbeda. Seperti bahasa pemograman
lainnya yaitu C++, matlab atau Visual basic , LabVIEW juga mempunyai fungsi
dan peranan yang sama, perbedaannya bahwa labVIEW menggunakan bahasa
pemrograman berbasis grafis atau blok diagram sementara bahasa pemrograman
lainnya menggunakan basis text. Program labVIEW dikenal dengan sebutan Vi atau
Virtual instruments karena penampilan dan operasinya dapat meniru sebuah
instrument.
Pada labVIEW, user pertama-tama membuat user interface atau front panel
knobs, push buttons, dials dan peralatan input lainnya sedangkan yang dimaksud
dengan indikator adalah graphs, LEDs dan peralatan display lainnya. Setelah
menyusun user interface, lalu user menyusun blok diagram yang berisi kode-kode
VIs untuk mengontrol front panel [9]. Software LabVIEW terdiri dari tiga
komponen utama, yaitu :
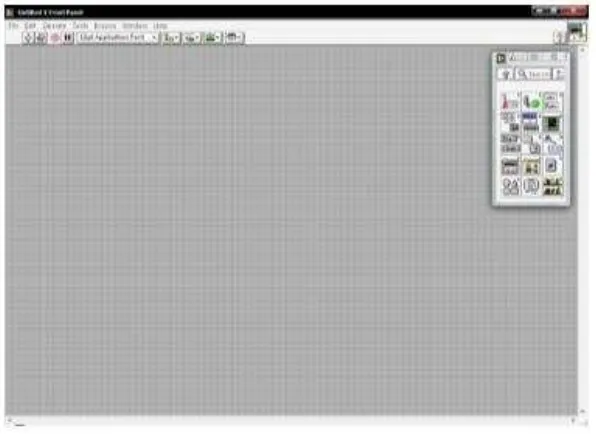
1. front panel
front panel adalah bagian window yang berlatar belakang abu-abu serta
mengandung control dan indikator. front panel digunakan untuk
membangun sebuah VI, menjalankan program dan mendebug program. Tampilan
dari front panel dapat di lihat pada Gambar 2
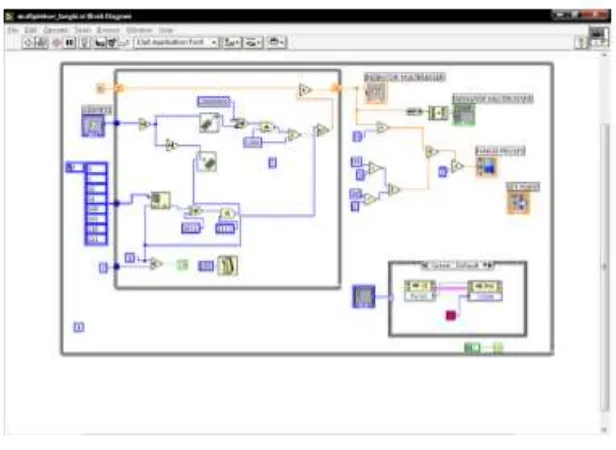
2. Blok diagram dari Vi
Blok diagram adalah bagian window yang berlatar belakang putih berisi source
code yang dibuat dan berfungsi sebagai instruksi untuk front panel. Tampilan dari
blok diagram dapat lihat pada Gambar 2.15