BAB 2
LANDASAN TEORI
2. Robotika
2.1.1. Sejarah Robot
Sejarah Perkembangan Robot Michael A.G dan Alan C.S dalam jurnal Human-Robot Interaction (HRI), 2007 Kata istilah robot berasal dari bahasa Ceko (Chech) robota, yang memiliki arti pekerja (worker) yang dapat diartikan sebagai pekerja yang tidak mengenal lelah.Istilah tersebut dikenalkan oleh penulis bernama Karl Capek pada tahun 1920 yang di pertunjukan dalam pentas komedi yang berjudul RUR (Rossum’s Universal Robot), yang bercerita tentang mesin yang menyerupai manusia tapi mampu bekerja terus menerus tanpa lelah. (widodo,2012)
Pengertian perilaku seperti robot dan implikasinya terhadap manusia telah sudah ada selama berabad-abad :
a. Pada abad ke 3 dekripsinya tentang automata terdapat dalam naskah Taoisme kuno Cina, Liezi. Banyak yang menduga penulis nakah naskah ini adalah Lie Yukou, seorang filsuf Cina, salah satu bagian buku tersebut menceritakan pertemuan antara Raja MU danri Disnati Zou (1023-957 SM) dan seseorang insinyur mekanik. Yang dikenal sebagai Yan Shi. Dengan bangga Yan Shi menunjukan hasil karyanya berupa manusia mekanis kepada raja.
b. Pada 1945, Leornado da vinci menuangkan ide-idenya tentang robot, leornado da vinci sendiri merupakan seorang penemu, arsitek, seniman, pematung, penulis, dan pelukis Renaisans dari italia dia banyak mendesain ciptaan berteknologi modern, tetapi jarang diwujudkansemasa hidupnya, kebanyakan ide-idenya dituangkan dalam bentuk gamar-gambar. Dia pernah mendesain aoutomata humanoid yang terlihat seperti ksatria bersenjata, kemudian dikenal sebagai robot leoanardo.
c. Jacqes de Vaucanson (1709- 1782). Dia merupkan penemu dan seniman asal prancis yang menciptakan robot dan mesin-mesin yang mengensankan dan inovatif.
Kejayaan robot dimulai pada tahun 1970 ketika Profesor Victor Scheinman dari Universitas Stanford mendesain lengan standar. Pada tahun 2000, Honda
memamerkan robot humanoid yang dibangun bertahun-tahun lamanya, yang diberi nama ASIMO, yang kemudian disusul oleh Sony dengan robot anjing AIBO-nya. (Budiharto, 2011)
2.1.2. Karakteristik Robot
Sebuah robot secara umum memiliki karakteristik sebagai berikut :
1. Sensing,yaitu robot harus dapat mendeteksi lingkungan sekitarnya (halangan, panas, suara, dan image).
2. Mampu bergerak, yaitu robot umumnya bergerak dengan menggunakan kaki maupun roda dan pada beberapa kasus robot lainnya diharapkan dapat terbang atau berenang.
3. Cerdas, yaitu robot memiliki kecerdasan bantuan agar dapat memutuskan aksi yang tepat dan akurat.
4. Membutuhkan energi yang memadai, yaitu robot membutuhkan catu daya yang memadai agar unit pengontrol dan aktuator dapat menjalankan fungsinya dengan baik.
2.1.3. Tipe Robot
Robot didesain dan dibuat sesuai kebutuhan pengguna.Hingga saat ini secara umum robot terbagi menjadi:
1. Robot manipulator
2. Robot Mobil (mobile robot) a. Robot daratan (ground robot)
1. Robot beroda 2. Robot berkaki
b. Robot air (submarine robot) c. Robot terbang (aerial robot) 2.2. Algoritma Fuzzy
2.2.1. Logika Fuzzy
Logika fuzzy pertama kali dikembangkan oleh Prof. Lotfi A. Zadeh, seorang profesor dari Universitas California, pada tahun 1960-an. Logika fuzzy dikembangkan dari teori himpunan fuzzy.
Fuzzy secara bahasa diartikan sebagai kabur atau samar-samar.Suatu nilai dapat bernilai besar atau salah secara bersamaan.Logika fuzzy memiliki derajat keanggotaan dalam rentang nilai 0 (nol) hingga 1(satu). Berbeda dengan logika digital atau diskrit yang hanya memiliki dua nilai yaitu 1(satu) atau 0 (nol).Logika fuzzy digunakan untuk menerjemahkan suatu besaran yang diekspresikan menggunakan bahasa(Linguistic). (Budiharto & Suhartono. 2014)
Logika Fuzzy merupakan sesuatu logikayang memiliki nilai kekaburan atau kesamaran (fuzzyness) antara benar atau salah. Dalam teori logika fuzzy suatu nilai bias bernilai benar atau salah secara bersama. Namun berapa besar keberadaan dan kesalahan suatu tergantung pada bobot keanggotaan yang dimilikinya.Logika fuzzy memiliki derajat keanggotaan dalam rentang 0 hingga 1.Berbeda dengan logika digital yang hanya memiliki dua nilai 1 atau 0.Logika fuzzy digunakan untuk menterjemahkan suatu besaran yang diekspresikan menggunakan bahasa (linguistic), misalkan besaran kecepatan laju kendaraan yang diekspresikan dengan pelan, agak cepat, cepat, dan sangat cepat.Logika fuzzy menunjukan sejauh mana suatu nilai itu benar dan sejauh mana suatu nilai itu salah. Tidak seperti logika klasik (scrisp)/ tegas, suatu nilai hanya mempunyai 2 kemungkinan yaitu merupakan suatu anggota himpunan atau tidak. Derajat keanggotaan 0 (nol) artinya nilai bukan merupakan anggota himpunan dan 1 (satu) berarti nilai tersebut adalah anggota himpunan.
Logika fuzzy adalah suatu cara yang tepat untuk memetakan suatu ruang input kedalam suatu ruang output, mempunyai nilai kontinyu. Fuzzy dinyatakan dalam derajat dari suatu keanggotaan dan derajat dari kebenaran. Oleh sebab itu sesuatu dapat dikatakan sebagian benar dan sebagian salah pada waktu yang sama.(Kusumadewi &Purnomo. 2013).
Logika Fuzzy memungkinkan nilai keanggotaan antara 0 dan 1, tingkat keabuan dan juga hitam dan putih, dan dalam bentuk linguistik, konsep tidak pasti seperti "sedikit", "lumayan" dan "sangat". Kelebihan dari teori logika fuzzy adalah kemampuan dalam proses penalaran secara bahasa (linguistic reasoning). Sehingga dalam perancangannya tidak memerlukan persamaan matematik dari objek yang akan dikendalikan.
2.3. Perangkat Keras 2.3.1. Mikrokontroler
Mikrokontroller merupakan alat pengolahan data digital dan analog (fitur ADC pada seri AVR) dalam level tegangan maksimum 5V. Keunggulan mikrokontroller dibanding microprocessor yaitu lebih murah dan didukung dengan software compiler yang sangat beragam seperti software compailer C/C++, basic,pascal, bahkan assembler. Sehingga penggunaan dapat memilih program yang sesuai dengan kemampuannya. Dalam hal penggunaan, mikrokontroller dapat dibedakan jenis dan tipenya, seperti mikrokontroller atmega 8, atmega 8535, atmega 16 dan lain-
lain.
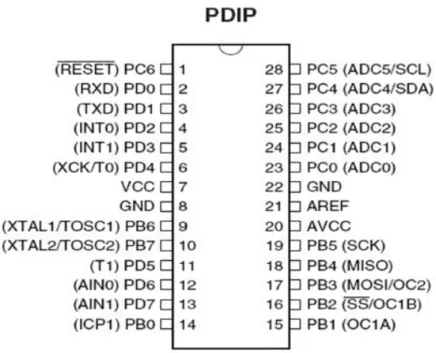
ATMega 8 adalah mikrokontroler CMOS 8-bit daya rendah berbasis arsitektur RISC yang ditingkatkan. Kebanyakan instruksi dikerjakan pada satu siklus clock, ATMega 8 mempunyai throughput mendekati 1 MPS per MHz membuat disain dari sistem untuk mengoptimasi konsumsi daya versus kecepatan proses.Susunan pin-pin dari IC mikrokontroler ATMega 8 diperlihatkan pada gambar dibawah ini. IC ini tersusun dari 28 pin yang memiliki beberapa fungsi tertentu.
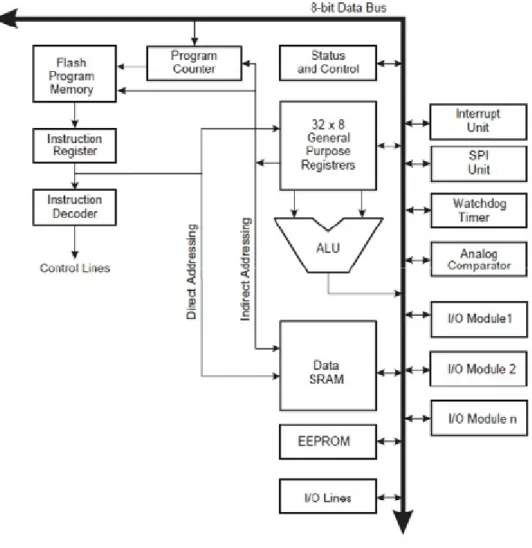
2.3.2 Arsitektur Mikrokontroler ATMega8
Gambar 2.1. Arsitektur ATMega8
Mikrokontroller AVR merupakan keluarga mikrokontroller RISC (Reduced Instruction Set Computing) keluaran Atmel. Konsep arsitektur AVR pada mulanya dibuat oleh dua orang mahasiswa di Norwgian institute of Technology ( NTH ) yaitu Alf-Egil Bogen dan Vegard Wollan. Penggunaan mikrokontroller ATMega8 ada dua pilihan ,dengan menggunakan board ATMega8 develompment board yang sudah ada dipasaran atau dengan membuat rangkaian sendiri. Jika menggunakan rangkaian mikrokontroler yang sudah tersedia dipasaran maka akan memepersingkat waktu pembuatan sistem, karena hanya tinggal membeli rangkaian berupa kit dan hanya tinggal menggunakannya. Chip yang dijelaskan di sini menggunakan kemasan PDIP,
untuk kemasan yang lain ( TQPF, QFN / MLF ) tidak jauh berbeda. Untuk lebih jelasnya silahkan merujuk ke data sheet. Nama nama pin di atas usahakan lebih sering dikenal, hal ini berguna untuk penggunaan pheripheral internal.
2.3.3. Fitur ATMega 8
Berikut ini adalah fitur-fitur yang dimiliki oleh ATMega8 : A. Saluran I/O sebanyak 23 buah terbagi menjadi 3 port.
B. ADC sebanyak 6 saluran dengan 4 saluran 10 bit dan 2 saluran 8 bit. C. Tiga buah timer counter, dua diantaranya memiliki fasilitas pembanding. D. CPU dengan 32 buah register
E. Watchdog timer dan oscillator internal. F. SRAM sebesar 1K byte.
G. Memori flash sebesar 8K Bytes system Self-programable Flash H. Unit interupsi internal dan eksternal.
I. Port antarmuka
J. EEPROM sebesar 512 byte.
K. Port USART ( Universal Syncronous and Asycronous Serial Receiver and Transmitter ) untuk komunikasi serial.
2.3.4. Konfigurasi Mikrokontroler ATMega8
ATMega8 memiliki 28 pin yang masing-masing pin-nya memiliki fungsi yang berbeda-beda baik sebagai port ataupun sebagai fungsi yang lain. Berikut akan dijelaskan tentang kegunaan dari masing-masing kaki pada ATMega8.
Gambar 2.2 PIN Konfigurasi pada ATMega8
2.3.5. Deskripsi Pin-Pin Pada Mikrokontroler ATMega8
1. VCC
Merupakan supply tegangan untuk digital. 2. GND
Merupakan ground untuk smua komponen yang membutuhkan grounding. 3. Port B
Adalah 8 buah pin mulai dari pin B.0 sampai dengan pin B.7. Tiap pin dapat digunakan sebagai input dan juga output. Port B merupakan sebuah 8-bit bit directional I/O port dengan inernal pull-up resistor. Sebagai input, pin-pin yang terdapat pada port B yang secara eksternal diturunkan, maka akan mengeluarkan arus jika pull-up resistor diaktifkan. Jika ingin menggunakan tambahan kristal, maka cukup untuk menghubungkan kaki dari kristal ke keki pada pin port B. Namun jika tidak digunakan, maka cukup untuk dibiarkan saja. Pengguna kegunaan dari masing-masing kaki ditentukan dari clock fuse setting-nya.
4. Port C
Port C merupakan sebuah 7-bit bi-directional I/O yang di dalam masing-masing pin terdapat pull-up resistor. Jumlah pin-nya hanya 7 buah mulai dari C.0 sampai dengan pin C.6. Sebagai keluaran / output, port C memiliki karakteristik yang sama dalam hal kemampuan menyarap arus ( sink ) ataupun mengeluarkan arus ( source).
5. Reset / PC6
Jika RSTDISBL Fuse diprogram, maka PC6 akan berfungsi sebagai pin I/O. Untuk diperhatikan juga bahwa pin ini memiliki karakteristik yang berbeda dengan pin-pin yang tedapat pada port C. Namun jika RSTDISBL Fuse tidak diprogram, maka pin ini akan berfungsi sebagai input reset. Dan jika level tegangan yang masuk ke pin ini rendah dan pulsa yang ada lebih pendek dari pulsa minimum, makan akan menghasilkan suatu kondisi reset meskipun clock-nya tidak berkerja.
6. Port D
Port D merupakan 8-bit bi-directional I/O dengan internal pull-up resistor. Fungsi dari port ini sama dengan port-port yang lain. Hanya saja pada port ini tidak terdapat kegunaan-kegunaan yang lain. Pada port ini hanya berfungsi sebagai masukan dan keluaran saja atau biasa disebut dengan I/O.
7. AVCC
Pada pin ini memiliki fungsi sebagai power supply tegangan untuk ADC. Untuk pin ini harus dihubungkan secara terpisah dengan VCC karena pin ini digunakan untuk analog saja. Bahkan jika ACD pada AVR tidak digunakan, tetap saja disarankan untuk menghubungkan secara terpisah dengan VCC. Cara menghubungkan AVCC adalah melewati low-pass filter setelah itu dihubungkan dengan VCC.
8. AREF
Merupakan pin referensi analog jika menggunakan ADC. Pada AVR status Registern mengandung beberapa informasi mengenai hasil dari kebanyakan hasil eksekusi intruksi aritmatik. Informasi ini dapat digunakan untuk alteringarus program sebagai kegunaan untuk meningkatkan performa pengoperasian. Perlu diketahui bahwa register ini di-update setelah semua operasi ALU ( Arithmetic Logic Unit ). Hal tersebut seperti yang telah tertulis dalam data sheet khususnya pada bagian Intruction Set Reference. Dalam hal ini untuk beberapa kasus dapat membuang kebutuhan penggunaan instruksi perbandingan yang telah didedikasikan serta dapat
menghasilkan peningkatan dalam hal kecepatan dan kode yang lebih sederhana dan singkat. Register ini tidak secara otomatis tersimpan ketika memasuki sebuah rutin interupsi dan juga ketika menjalankan sebuah perintah setelah kembali dari interupsi. Namun hal iini harus dilakukan melalui software.
9. Bit 7 (1)
Merupakan bit Global Interrupt Enable. Bit ini harus di-set supaya semua perintah interupsi dapat dijalankan. Untuk fungsi interupsi individual akan dijelaskan pada bagian yang lain. Jika bit ini di-reset, maka semua perintah interupsi baik yang secara individual maupun yang secara umum akan diabaikan. Bit ini akan dibersihkan atau cleared oleh hardware setelah sebuah interupsi dijalankan dan akan di-set kembali oleh perintah RETI. Bit ini juga dapat di-set dan di-reset melalui aplikasi dengan instruksi SEI dan CLI.
10. Bit 6 (T)
Merupakan bit Copy Storage. Instruksi bit Copy Instruction BLD ( Bit LoaD ) dan BST ( Bit Store ) menggunakan bit ini sebagai asal atau tujuan untuk bit yang telah dioperasikan. Sebuah bit dari sebuah register dan Register File dapat disalin ke dalam bit ini dengan menggunakan intruksi BST, dan sebuah bit di dalam bit ini dapat disalin ke dalam sebuah bit di register pada Register File dengan menggunakan perintah BLD.
11. Bit 5 (H)
Merupakan bit Half Carry Flag. Bit ini menandakan sebuah Half Carry dalam beberapa operasi aritmatika. Bit ini berfungsi dalam aritmatik BCD.
12. Bit 4 (S)
Merupakan Sign bit. Bit ini selalu merupakan sebuah eksklusif di antara Negative Flag (N) dan Two’s Complement Overflow Flag (V).
13. Bit 3 (V)
Merupakan bit Two’s Complement Overflow Flag. Bit ini menyediakan fungsi aritmatika dua komplemen.
14. Bit 2 (N)
Merupakan bit Negative Flag. Bit ini menyediakan sebuah hasil negative di dalam sebuah fugnsi logika atau aritmatika. 15. Bit 1 (Z) Merupakan bit Zero Flag. Bit ini mengindikasikan sebuah hasil nol “ 0 ” dalam sebuah fungsi aritmatika atau logika.
16. Bit 0 (C)
Meruapakan bit Carry Flag. Bit ini mengindikasikan sebuah Carry atau sisa dalam sebuah fugnsi aritmatika atau logika. (Nababan,2015)
2.4. Sensor
2.4.1. Sensor Inframerah
Infra merah merupakan piranti yang sangat umum digunakan dalam suatu sistem instrumentasi. Infra merah dapat didefinisikan sebagai alat pemberi sinyal pada sensor. Sistem sensor infra merah pada dasarnya menggunakan infra merah sebagai media untuk komunikasi data antara receiver dan transmitter. Sistem akan bekerja jika sinar infra merah yang dipancarkan terhalang oleh suatu benda yang mengakibatkan sinar infra merah tersebut tidak dapat terdeteksi oleh penerima. Infra merah yang digunakan dalam sistem instrumentasi pengukuran kecepatan benda yang bergerak berupa cahaya yang memiliki panjang gelombang dan radiasi yang tajam. Adapun pemancar atau penembak cahaya yang dapat digunakan, seperti Infra red dan dioda laser. Infra merah prinsip kerjanya sama seperti LED biasa. Perbedaannya cahaya yang dipancarkan pada Infra red LED berupa cahaya tak tampak. Infra red LED memiliki panjang gelombang sebesar 750-1000nM dan arus maksimal sebesar 100mA. Kelemahan dari Infra red ini adalah daya jelajah yang tidak jauh hanya sekitar 7-8 meter dengan sudut radiasi sebesar 450 . (Taufic, 2009)
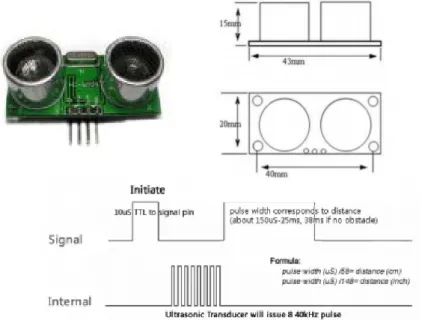
2.4.2. Sensor Ultrasonik
Sensor jarak ultrasonik sangat cocok dipakai untuk aplikasi-aplikasi yang membutuhkan pengukuran jarak. Sensor jarak ultrasonik yang dipakai dalam penelitian ini adalah sensor HC-SR04. Sensor HC-SR04 memiliki kemampuan membaca jarak dari 2 cm sampai 500 cm. (Nauriana,2009)
Gambar 2.3 : HC-SR04 Sinyal Kontrol
2.5. Aktuator
Aktuator adalah bagian yang berfungsi sebagai penggerak dari perintah yang diberikan oleh input. Aktuator biasanya merupakan peranti elektromekanik yang menghasilkan gaya gerakan. Aktuator terdiri dari 2 jenis, yaitu:
1. Aktutor elektrik
2. Aktuator pneumatik dan hidrolik
Pada penelitian ini aktuator yang akan digunakan adalah aktuator elektrik yang berupa motor DC yang akan dijelaskan sebagai berikut :
2.5.1. Motor DC
Motor DC adalah suatu mesin yang berfungsi untuk mengubah energi listik arus searah menjadi energi gerak atau energi mekanik. Motor yang paling sederhana untuk pengaktifannya.Motor DC terdiri dari dua bagian utama, yaitu rotor dan stator.Rotor adalah bagian yang berputar atau armature, berupa koil dimana arus listrik dapat mengalir. Stator adalah bagian yang tetap dan menghasilkan medan magnet dari koilnya. (Susilo,2010)
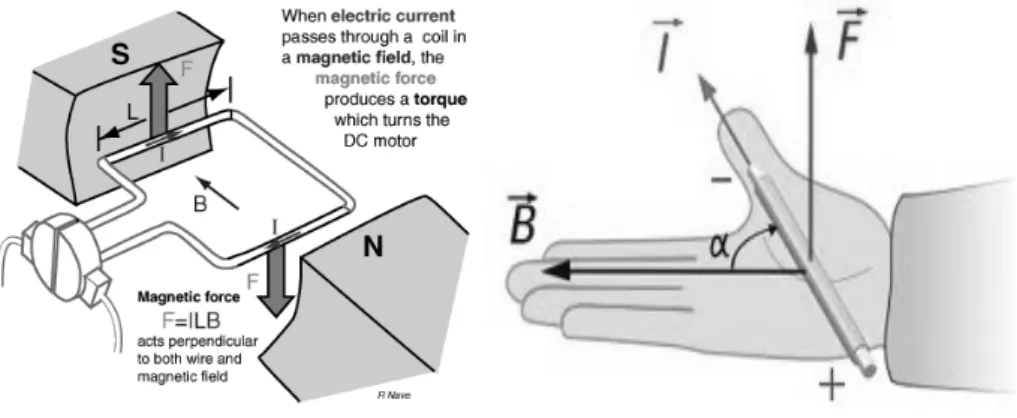
Prinsip kerja motor DC adalah jika kumparan dialiri arus listrik maka pada kedua kumparan akan bekerja gaya Lorentz. Pada Gambar dapat dilihat prinsip kerja
gaya Lorentz, dimana gaya yang jatuh pada telapak tangan (F), jari yang direntangkan menunjukan arah medan magnet (B), ibu jari menunjukkan arah arus listrik(I).
Gambar 2.4. prinsp gaya Lorenz (Sumber:
Berdasarkan pada prinsip gaya Lorentz, jika diberikan tegangan pada DC motor maka gaya tersebut akan membuat motor berputar secara kontinu ke arah tertentu. Membalikkan arah putaran motor dapat dilakukan dengan mengubah polaritas arus yang mengalir pada motor Gambar dibawah memperlihatkan arah perputaran motor DC berdasarkan polaritas arus yang mengalir.
Gambar 2.5. Arah perputaran motor DC
(Sumber:
Motor DC biasanya mempunyai kecepatan putar yang cukup tinggi dan sangat cocok digunakan untuk roda robot yang membutuhkan kecepatan gerak yang tinggi. 2.5.2 Motor Servo
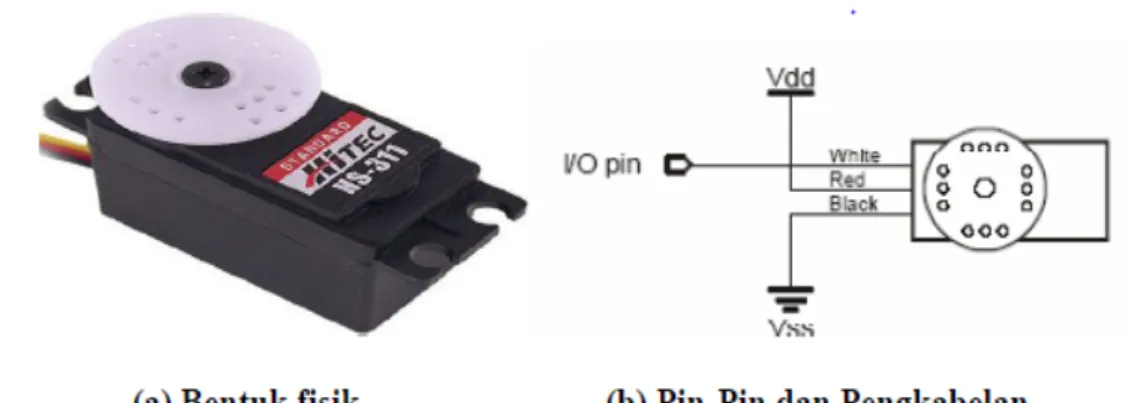
Motor DC Servo (DC-SV) pada dasarnya adalah motor DC-MP dengan kualifikasi khusus yang sesuai dengan aplikasi “servoing” di dalam teknik kontrol. Dalam kamus Oxford istilah “servo” diartikan sebagai “a mechanism that controls a larger mechanism”. Motor servo merupakan motor DC yang mempunyai kualitas tinggi, sudah dilengkapi dengan sistim kontrol di dalamnya. Dalam aplikasi motor servo sering digunakan sebagai kontrol loop tertutup untuk menangani perubahan posisi secara tepat dan akurat. Begitu juga dengan pengaturan kecepatan dan percepatan.
Gambar 2.6 Model Fisik dan Pin-Pin Motor servo
Bentuk fisik dari motor servo dapat dilihat pada gambar 2.5 diatas. Sistem pengkabelan motor servo terdiri dari 3 bagian, yaitu Vcc, Gnd, dan kontrol (PWM). Penggunaan PWM pada motor servo berbeda dengan penggunaan PWM pada motor DC. Pada motor servo, pemberian nilai PWM akan membuat motor servo bergerak pada posisi tertentu dan kemudian berhenti (kontrol posisi). Pengaturannya dapat dilakukan dengan menggunakan delay pada setiap perpindahan dari posisi awal menuju posisi akhir.
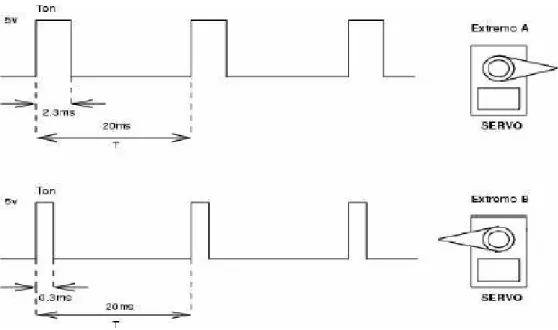
Prinsip utama pengontrolan motor servo adalah pemberian nilai PWM pada kontrolnya. Perubahan duty cycle akan menentukan perubahan posisi dari motor servo.
Mode pensinyalan motor servo tampak pada gambar 2.6.
Gambar 2.7 Mode Pensinyalan motor servo
Contoh dimana bila diberikan pulsa dengan besar 1.5ms mencapai gerakan 90 derajat, maka bila kita berikan data kurang dari 1.5 ms maka posisi mendekati 0 derajat dan bila kita berikan data lebih dari 1.5 ms maka posisi mendekati 180 derajat.
Contoh Posisi dan Waktu Pemberian Pulsa tampak pada gambar 2.7.
Gambar 2.7 Contoh Posisi dan Waktu Pemberian Pulsa
Motor Servo akan bekerja secara baik jika pada bagian pin kontrolnya diberikan sinyal PWM dengan frekuensi 50Hz. Dimana pada saat sinyal dengan frekuensi 50Hz tersebut dicapai pada kondisi Ton duty cycle 1.5ms, maka rotor dari motor akan berhenti tepat di tengah-tengah (sudut 0° / netral). Pada saat Ton duty cycle dari sinyal
yang diberikan kurang dari 1.5ms, maka rotor akan berputar ke arah kiri dengan membentuk sudut yang besarnya linier terhadap besarnya Ton duty cycle, dan akan bertahan diposisi tersebut. Dan sebaliknya, jika Ton duty cycle dari sinyal yang diberikan lebih dari 1.5ms, maka rotor akan berputar ke arah kanan dengan membentuk sudut yang linier pula terhadap besarnya Ton duty cycle, dan bertahan diposisi tersebut.
1. Tinjauan Penelitian
Beberapa contoh penelitian ATMega8 sebagai berikut :
1. Nababan, Alpredo (2015). Membuat penelitian yang berjudul Perancangan Alat Pengukur Jarak Menggunakan Software Basic Complier-AVR Berbasis Mikrokontroller ATMega8. Implementasi dari penelitian ini adalah merancang dan mengimplementasikan dengan menggunakan mikrokontroler ATMega8 dan sensor infra merah. Basis pengetahuan robot berisi pengkodean aksi yang harus dilakukan oleh robot berdasarkan informasi dari sensor.
2. Nuriana (2009). Membuat penelitian yang berjudul Rancang Bangun Robot Beroda Penghindar Halangan.Implementasi dari penelitian ini menggunakan sensor ultrsonik dan mikrokontroler AT89S51 yang akan dirancang untuk bergerak menghindar jika terdapat ada halangan yang berada di depan, kiri dan kanannya. 3. Kurniadi (2007). Membuat penelitian yang berjudul Perancangan Penghindar
Dinding Dengan Menggunakan Sensor Infra Merah Berbasis Mikrokontroler AT89S51. Implementasi penelitian ini menggunakan infra merah dan mikrokontroler AT89S51 yang akan dirancang untuk bergerak menghindar jika terdapat ada halangan yang berada di depan, kiri dan kanannya.