BAB I PENDAHULUAN 1.1 Latar Belakang
Dalam kehidupan sehari-hari kita menghadapi banyak sekali hal yang berhubungan langsung secara fisik dengan diri kita. Seperti misal berlari , berjalan, mengangkat benda, dan memindahkan sesuatu dengan posisi yang bermacam-macam. Dalam ilmu ergonomi kita bisa memecahkan permasalahan tersebut melalui pendekatan, yaitu biomekanika, manual material handling, dan
physiological performance. Untuk permasalahan dalam biomekanika, kita sering
sekali dihadapkan dalam sebuah kondisi dimana kita diharuskan mengangkat beban berat yang belum diketahui oleh badan kita apakah beban tersebut aman diangkat dalam posisi tertentu ataukah harus diangkat dengan posisi lain yang bisa lebih mendukung pengangkatan tersebut. Kemudian untuk manual material
handling, kita sering dihadapkan dalam permasalahan dimana suatu beban yang
akan kita angkat memiliki bentuk fisik yang tidak mensupport dan juga kondisi lapangan yang kurang baik bagi kita. Dan yang terakhir adalah physiological
performance, dimana kita juga sering dihadapkan pada suatu pekerjaan fisik
tanpa disokong oleh waktu istirahat yang optimal. Disini kita bisa dihadapkan pada recovery time yang terlalu sebentar ataupun recovery time yang terlalu lama. Hal ini sama-sama merugikan kita. Untuk waktu yang terlalu lama, pihak perusahaan bisa dirugikan karena kerja menjadi kurang optimal. Sedangkan untuk waktu yang terlalu cepat akan menyebabkan para karyawan menjadi cepat lelah dan akhirnya hasil pekerjaan akan kurang optimal lagi.
Hal diatas bisa diatasi dengan pendekatan manual material handling, biomekanika, dan physiological performance. Untuk manual material handling, kita bisa mengaplikasikannya dalam pencarian nilai RWL dan LI. Dimana nilai tersebut akan kita gunakan sebagai pegangan, apakah suatu posisi pemindahan material yang kita lakukan tersebut aman digunakan ataukah termasuk dalam posisi yang tidak baik, sehingga harus dicari posisi lain yang lebih mendukung dalam perlakuan sebuah benda. Untuk biomekanika juga hampir sama, dimana untuk setiap segmen tubuh bisa kita cari berapa beban yang aman diambil dalam posisi tertentu dan menentukan stance yang paling mendukung dalam sebuah kasus material handling. Dan yang terakhir adalah physiological
performance, dimana kita bisa menentukan berapa waktu istirahat (recovery time yang optimal dalam sebuah aktivitas).
1.2 Perumusan Masalah
Dalam responsi modul 2 ini akan di bahas tentang analisa posisi optimum, posisi maksimum, posisi aman dan posisi back injury pada operator. Kemudian untuk physiological performance kami membahas tentang perbandingan heart
rate sebelum dan sesudah aktivitas, dan mencari tahu mengenai perbandingan
antara pengaruh berat badan dan jenis kelamin terhadap heart rate dan konsumsi energi, serta perbandingan antara recovery time dan waktu istirahat. Disini kami juga melakukan analisa tentang recovery time dan waktu istirahat agar dapat diketahui perbandinganya. Yang terakhir pada manual material
handling, akan di bahas tentang RWL atau yang diketahui sebagai Recommended Weight Limit dan LI atau yang diketahui dengan lifting index
dengan melakukan analisa perbandingan antara RWL dan berat beban yang diangkat. Disini juga akan dilakukan analisa tentang REBA yaitu Rapid Entire
1.3 Tujuan Responsi
Tujuan dilaksanakan praktikum modul 2 adalah:
1. Mengetahui Hubungan Tiap Segmen Tubuh pada Tiap Posisi dengan Daya Angkat
2. Menganalisa Posisi dan Daya Angkat.
3.
Mengetahui Perbandingan Heart Rate Sebelum dan Sesudah Aktivitas.4.
Menganalisa Perbandingan Recovery Time dengan Waktu Istirahat.5. Mengetahui Pengaruh Berat badan dan Jenis Kelamin terhadap Konsumsi Energi.
6.
Mengetahui Pengaruh Berat badan dan Jenis Kelamin terhadap Heart Rate7.
Mengetahui Pengaruh Konsumsi Energi Terhadap Heart Rate.8.
Mengetahui Perhitungan Lifting Index 1.4 Manfaat ResponsiAdapun manfaat dalam responsi modul 2 kali ini antara lain:
1. Mengetahui posisi yang ideal bagi manusia dalam melakukan pekerjaan
2. Mampu menentukan batas beban yang dapat diangkat pekerja
3. Mampu mendesain sistem kerja yang sesuai dengan kemampuan fisik pekerja
4.
Mampu memperhitungkan berapa lama bekerja secara efektif dan waktu istirahat bagi para pekerja1.5 Ruang Lingkup Responsi
Ruang lingkup responsi meliputi batasan responsi dan asumsi responsi. 1.5.1 Batasan Responsi
Adapun batasan responsi dalam modul 2 ini adalah :
1.
Pada posisi biomekanika yaitu ada 4 posisi, setiap posisi dilakukan pengukuran beban sebanyak tiga kali.2.
Pada saat treadmill berjalan dengan kecepatan 10 km/jam, operator hanya dibatasi lari selama 5 menit.3.
Pengukuran yang dilakukan sebatas dari mahasiswa Teknik Industri yang mengambil mata kuliah ergonomi pada semester gasal tahun 20101.5.2 Asumsi Responsi
Adapun asumsi yang diberikan diantaranya :
1.
Saat pengukuran beban pada posisi floor lift sudut yang dibentuk oleh lutut operator 90°2.
Saat pengukuran vertikal dan horizontal pada manual materialhandling, titik pusat operator dan beban sesuai dengan semestinya
3.
Pada pengukuran biomekanika akan membahas tentang hubungan tiap segmen tubuh pada tiap posisi dengan daya angkat dan operatornya adalah laki-laki4.
Keadaan beban pada manual material handling diasumsikan fair5.
Gravitasi bumi g = 10m/s2BAB II
METODOLOGI RESPONSI
Dalam bab 2 yang berisi metodologi responsi akan dibagi menjadi 2 sub bab yaitu peralatan responsi dan flowchart responsi.
2.1 Peralatan Responsi
Peralatan responsi yang digunakan terdiri atas peralatan yang dilakukan untuk mengukur
2.1.1 Biomekanika
Peralatan responsi yang dibutuhkan pada pengambilan data biomekanika adalah :
1. Dynamometer
2. Penggaris busur
3. Observation sheet
2.1.2 Physichological Performance
Peralatan responsi yang dibutuhkan pada pengambilan data
Physichological Performance
adalah sebagai berikut: 1. Timbangan badan
2.
Pulsemeter adalah sebuah alat pemantauan pribadi yangmemungkinkan subjek mereka untuk mengukur denyut jantung secara real time atau merekam detak jantung
3.
Treadmill adalah suatu mesin latihan yang digunakan untukberjalan atau berlalu pada satu tempat.
4. Observation sheet
Peralatan responsi yang dibutuhkan pada pengambilan data Manual
Material Handling
adalah sebagai berikut : 1. Beban angkat. 2. Rak bertingkat 3. Kamera 4. Calculator 5. Observation sheet 2.2 Flowchart 2.2.1 Gambar Flowchart
BASIC ERGONOMIC
BIOMEKANIKA
TANGAN & KAKI
START PHYSIOLOGICAL PERFORMANCE MANUAL MATERIAL HANDLING
UJI HEART RATE
PERHITUNGAN RWL REKAP DATA REKAP DATA REKAP DATA PROSES DENGAN MS VISIO PENGGAMBARAN POSISI
GRAFIK HEART RATE DENGAN DENGAN WAKTU PERHITUNGAN RECOVERY TIME PERHITUNGAN LI PENGHITUNGAN SOFTWARE ERGO INTELEGENCE REKAP DATA TABEL BIOMEKANIKA PENGHITUNGAN SEGMEN REKAP DATA ANALISA DAN INTERPRETASI DATA KESIMPULAN & SARAN PENGHITUNGAN WAKTU ISTIRAHAT REKAP DATA STOP
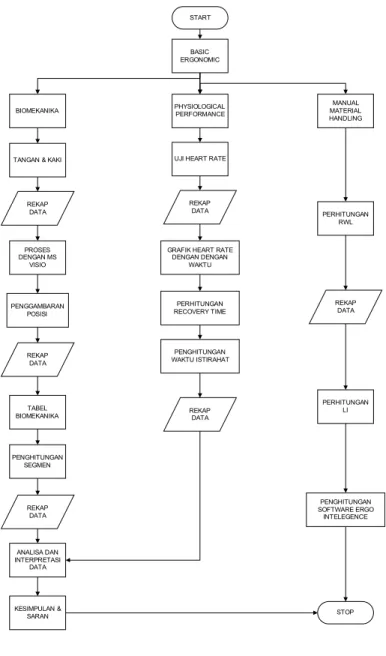
2.2.2
Penjelasan FlowchartDalam pengerjaan responsi ergonomi modul 2 ini, dilakukan pengumpulan dan pengolahan data dari tiga jenis bagian dasar ilmu
Gambar 2.1 Flowchart Biomekanika, Physical
ergonomi, yaitu Biomekanika,Physical Performance dan Manual Material
Handling.
2.2.2.1 Penjelasan Flowchart Biomekanika
Pada Anthropometri pengumpulan data diambil melalui pengukuran tangan dan kaki. Untuk penghitungan, terdapat empat posisi, yaitu
1. Posisi 1 : Arm Lift 2. Posisi 2 : High Far Lift 3. Posisi 3 : Leg Lift 4. Posisi 4 : Floor Lift
Lalu semua data yang telah diperoleh direkap, kemudian data yang telah didapat, diproses dengan MS Visio dan juga digambar pada setiap posisinya, lalu data direkap di dalam table biomekanika, setelah itu, data dihitung sesuai panjang dan berat segmen serta dihitung juga momen yang terjadi pada tiap segmen, setelah didapat datanya, direkap kembali ke table dan kemudian semua hasil data yang diperoleh di analisa dan di interpretasikan dan membuat kesimpulan dan saran.
2.2.2.2 Penjelasan Flowchart Physical Performance
Pada bagian Physical Performance, data yang diambil merupakan pengujian penghitungan Heart Rate terhitung pada sebelum, saat dan setelah melakukan aktivitas, semua data yang telah diperoleh direkap berdasarkan jenis kelamin dan berat. Lalu dibuat grafik hubungan antara Heart Rate dengan waktu. Setelah itu, dihitung juga Recovery Time dan juga waktu istirahat setelah melakukan aktivitas. Lalu data yang telah didapat direkap, kemudian semua hasil data yang diperoleh di analisa dan di interpretasikan, kemudian membuat kesimpulan dan saran.
2.2.2.3 Penjelasan Manual Material Handling
Data yang telah didapat pada percobaan sebelumnya dihitung menggunakan persamaan Recommended Weight Limit
(RWL) , hasil yang didapatkan lalu direkap. Setelah itu, dilakukan
penghitungan kembali menggunakan Perhitungan Lifting Index
(LI), lalu menggunakan software ERGO Intelligence untuk
mendapatkan hasil analisa REBA. Setelah hasilnya didapatkan, data lalu dianalisa dan diinterpretasikan, kemudian membuat kesimpulan dan saran.
BAB III
PENGUMPULAN DAN PENGOLAHAN DATA 3.1 Biomekanika
3.1.1 Definisi biomekanika dan aplikasinya
Biomekanika adalah bidang ilmu yang memadukan antara bidang ilmu biologi dan mekanika. Biomekanika menggunakan hukum – hukum fisika, mekanika teknik, biologi, dan prinsip fisiologi untuk menggambarkan kinematika dan kinetik yang terjadi pada anggota tubuh manusia. Mekanika digunakan sebagai penyusun konsep, analisa, dan desain dalam sistem biologi makhluk hidup. Dalam biomekanika, ada suatu teori yang menjelaskan bahwa terdapat 2 macam gaya yang bekerja pada saat melakukan akivitas. Yang pertama yaitu gaya isometris/statis, yaitu gaya yang dikeluarkan tanpa menghasilkan suatu kerja. Contoh dari kerja statis adalah memegang benda dengan tangan, menyangga beban tubuh pada satu kaki sedangkan kaki yang lain mengoperasikan pedal, mendorong/menarik beban berat, dll. Dan yang kedua yaitu gaya isotonis/dinamis, adalah memanjang dan memendeknya otot dengan melakukan suatu kerja. Contoh dari aplikasi biomekanika pada kehidupan sehari – hari di antaranya adalah alat penyangga untuk beban berat, kaki palsu bagi penyandang cacat, klep jantung mekanik, alat pengisi air otomatis pada restoran cepat saji, dll.
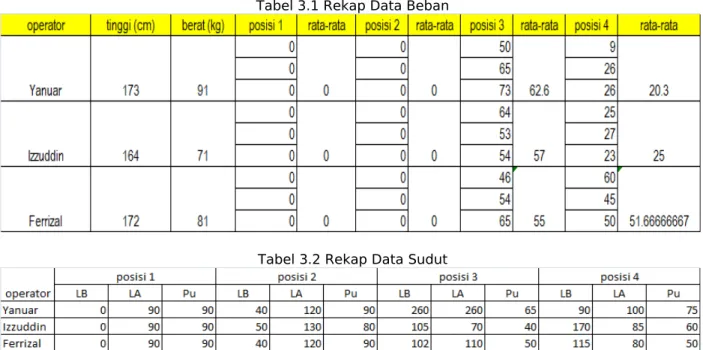
3.1.2 Rekap Data Beban dan Sudut
Tabel 3.1 Rekap Data Beban
Tabel 3.2 Rekap Data Sudut
Panjang segmen (cm)
Berat segmen (kg) Pusat massa (cm)
...% * tinggi badan ...% * berat badan
...% * panjang segmen
Lengan bawah (forearm)
26.5
2.3
41
dari siku
Lengan atas (upper arm)
16.4
2.8
48
dari bahu
Punggung (trunk)
28.8
58.4
46
dari pinggul
Segmen tubuh
Ket.Pengukuran
pusat massa
3.1.3 Perhitungan Panjang dan Berat Segmen Tubuh Operator 1
Nama : Yanuar
Tinggi badan : 173 cm Berat badan : 91 kg
Tabel 3.4 Proporsi Berat Segmen Tubuh Operator 1
Operator 2
Nama : Izzudin
Tinggi badan : 164 cm Berat badan : 71 kg
Tabel 3.5 Berat Segmen Tubuh Operator 2
Operator 3
Nama : Ferrizal
Tinggi badan : 172 cm Berat badan : 81 kg
3.1.4 Perhitungan Momen Segmen Tubuh untuk Setiap Posisi
3.1.4.1
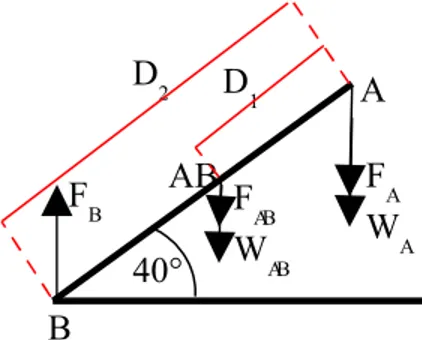
Posisi 1 : Arm Lift Lengan bawah
Gambar 3.1 Posisi lengan bawah pada Arm Lift Keterangan :
wA : Berat beban pada tangan (kg)
wAB : Berat segmen (kg)
FA : Gaya pada pergelangan tangan (N)
FAB : Gaya pada pusat massa segmen lengan bawah (N)
FB : Gaya pada siku (N)
θ : Sudut antara lengan bawah dengan bidang horisontal
D1 : Jarak antara siku dengan pusat massa segmen lengan bawah
(m)
D2 : Panjang segmen lengan bawah (m)
MB : Momen pada siku (Nm)
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
∑
Fy =0 0 2 / − + = −FA FAB FB AB A BF
F
F
=
/
2
+
FB = FA / 2 . D2 . cosθ
- FAB . D1 . cosθ
= 20,93 N∑
M =0 0 2 / 2 − 1 + = −FA DCosθ FABDCosθ MBF
ABW
ABF
AW
AAB
A
B
D
2D
1F
Bθ θ F DCos Cos D F M A AB B = 2 2 + 1 MB = {0 x 0,45845 . cos 180°} + {20,93 . 0,1879645 . cos 180°} = 0 - 3,934096985 = - 3,934096985 Nm
Tabel 3.7 Tabel Gaya dan Momen Posisi 1 Lengan Bawah Posisi 1 operat or FB (N) MB (Nm) Yanuar 20,93 -3,9340969 85 Izzudin 16.33 0 Ferrizal 18.63 0 Lengan atas
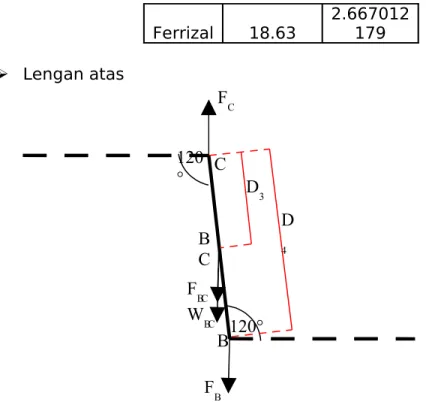
Gambar 3.2 Posisi lengan atas pada Arm Lift Keterangan :
wBC : Berat segmen lengan atas (kg)
FB : Gaya pada segmen lengan bawah (N)
FBC : Gaya pada pusat massa segmen lengan atas (N)
FC : Gaya pada bahu (N)
θ : Sudut antara segmen lengan atas dengan bidang horisontal D3 : Jarak antara bahu dengan pusat massa segmen lengan atas (m)
F
B90°
F
BCW
BCBC
B
C
90
°
D
4D
3F
C∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
g w F F F F F F F F Fy BC B C BC B C C BC B . + = + = = + − − =
∑
0 0 Fc = 20,93 + [ WBC . g ] = 20,93 + [ 2,548 . 10 ] = 20,93 + 25,48 = 46,41 N B BC B C C B BC B M D F D F M M M D F D F M − + = = + + − − =∑
θ
θ
θ
θ
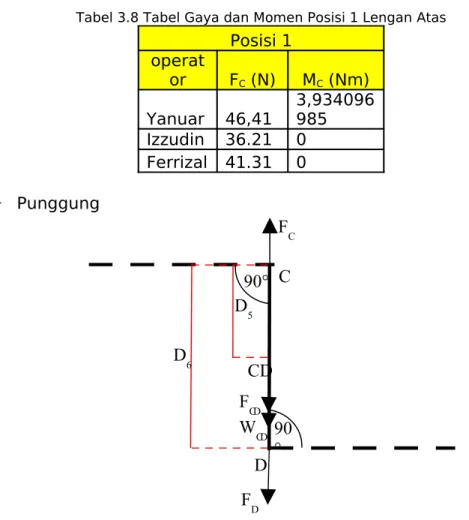
cos . 3 . cos . 4 . 0 cos . 3 . cos . 4 . 0 MC = { 20,93 . 0,28372 . cos 90° } + { 25,48 . 0,1361856 . cos 90° } – [-3,934096985 ] = 0 + 0 + 3,934096985 = 3,934096985 NmTabel 3.8 Tabel Gaya dan Momen Posisi 1 Lengan Atas Posisi 1 operat or FC (N) MC (Nm) Yanuar 46,41 3,934096985 Izzudin 36.21 0 Ferrizal 41.31 0 Punggung
Gambar 3.3 Posisi Punggung pada Arm Lift
F
D90°
F
CDW
CDCD
D
C
90
°
D
6D
5F
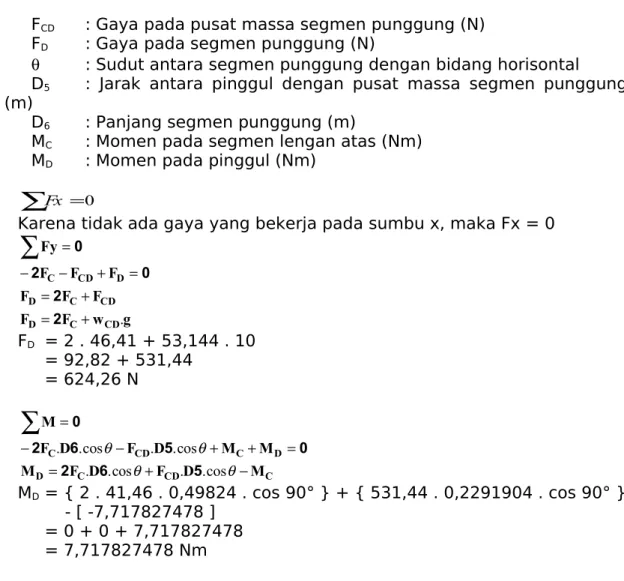
CKeterangan :
WCD : Berat segmen punggung (kg)
FC : Gaya pada segmen lengan atas (N)
FCD : Gaya pada pusat massa segmen punggung (N)
FD : Gaya pada segmen punggung (N)
θ : Sudut antara segmen punggung dengan bidang horisontal
D5 : Jarak antara pinggul dengan pusat massa segmen punggung
(m)
D6 : Panjang segmen punggung (m)
MC : Momen pada segmen lengan atas (Nm)
MD : Momen pada pinggul (Nm)
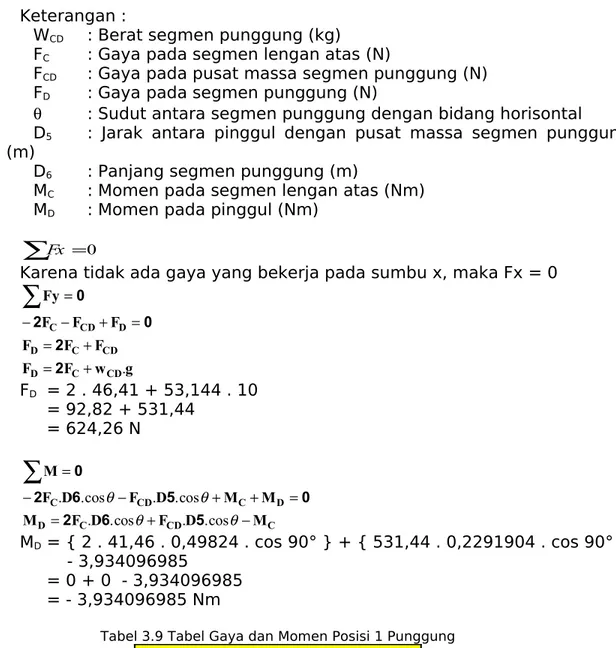
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
g w F F F F F F F F Fy CD C D CD C D D CD C . + = + = = + − − =
∑
2 2 0 2 0 FD = 2 . 46,41 + 53,144 . 10 = 92,82 + 531,44 = 624,26 N C CD C D D C CD C M D F D F M M M D F D F M − + = = + + − − =∑
θ θ θ θ cos . . cos . . cos . . cos . . 5 6 2 0 5 6 2 0 MD = { 2 . 41,46 . 0,49824 . cos 90° } + { 531,44 . 0,2291904 . cos 90° } - 3,934096985 = 0 + 0 - 3,934096985 = - 3,934096985 NmTabel 3.9 Tabel Gaya dan Momen Posisi 1 Punggung Posisi 1 operat or FD (N) MD (Nm) Yanuar 624,26 - 3,9340969 85 Izzudin 487.06 0 Ferrizal 555.66 0
3.1.4.2
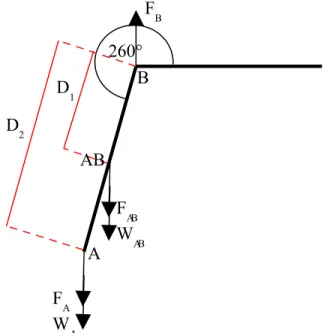
Posisi 2 : High Far Lift Lengan bawahGambar 3.4 Posisi lengan bawah pada High Far Lift Keterangan :
wA : Berat beban pada tangan (kg)
wAB : Berat segmen (kg)
FA : Gaya pada pergelangan tangan (N)
FAB : Gaya pada pusat massa segmen lengan bawah (N)
FB : Gaya pada siku (N)
θ : Sudut antara lengan bawah dengan bidang horisontal
D1 : Jarak antara siku dengan pusat massa segmen lengan bawah
(m)
D2 : Panjang segmen lengan bawah (m)
MB : Momen pada siku (Nm)
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
∑
Fy =0 0 2 / − + = −FA FAB FB AB A BF
F
F
=
/
2
+
FB = { WA . g / 2 } + { WAB . g } = { 0 . 10 / 2 } + { 2,093 . 10 } = 0 + 20,93 = 20,93 N∑
M =0 0 2 / 2 − 1 + = −FA D Cosθ FABDCosθ MB MB = FA / 2 . D2 . cosθ
- FAB . D1 . cosθ
= 0 + { 20,93 . 0,1879645 . cos 40° } = 0 + { 3,934096985 . 0,766044443 } = 3,013693134 NmTabel 3.10 Tabel Gaya dan Momen Posisi 2 Lengan Bawah Posisi 2 operat or FB (N) MB (Nm) Yanuar 20,93 3,013693134 Izzudin 16.33 1.870368845
F
ABW
ABF
AW
AAB
A
B
40°
D
2D
1F
BFerrizal 18.63 2.667012179 Lengan atas
Gambar 3.5 Posisi lengan atas pada High Far Lift Keterangan :
wBC : Berat segmen lengan atas (kg)
FB : Gaya pada segmen lengan bawah (N)
FBC : Gaya pada pusat massa segmen lengan atas (N)
FC : Gaya pada bahu (N)
θ : Sudut antara segmen lengan atas dengan bidang horisontal D3 : Jarak antara bahu dengan pusat massa segmen lengan atas (m)
D4 : Panjang segmen lengan atas (m)
MB : Momen pada segmen lengan bawah (Nm)
MC : Momen pada bahu (Nm)
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
g w F F F F F F F F Fy BC B C BC B C C BC B . + = + = = + − − =
∑
0 0 Fc = 20,93 + [ WBC . g ] = 20,93 + [ 2,548 . 10 ] = 20,93 + 25,48 = 46,41 NF
BCW
BCB
C
B
C
120
°
D
4D
3F
CF
B120°
B BC B C C B BC B M D F D F M M M D F D F M − + = = + + − − =
∑
θ
θ
θ
θ
cos . 3 . cos . 4 . 0 cos . 3 . cos . 4 . 0 MC = { 20,93 . 0,28372 . cos 120° } + { 25,48 . 0,1361856 . cos 120° } - 3,013693134 = { 5,9382596 . [-0,5] } + { 3,470009088 . [-0,5] } - 3,013693134 = [-2,9691298] + [-1,735004544] – 3,013693134 = -7,717827478 NmTabel 3.11 Tabel Gaya dan Momen Posisi 2 Lengan Atas Posisi 2 operat or FC (N) MC (Nm) Yanuar 46,41 -7,717827478 Izzudin 36.21 -6.343296865 Ferrizal 41.31 -6.830005235 Punggung
Gambar 3.6 Posisi punggung pada High Far Lift Keterangan :
WCD : Berat segmen punggung (kg)
FC : Gaya pada segmen lengan atas (N)
F
D90
°
F
C DW
CDC
D
D
C
90
°
D
6D
5F
CFCD : Gaya pada pusat massa segmen punggung (N)
FD : Gaya pada segmen punggung (N)
θ : Sudut antara segmen punggung dengan bidang horisontal
D5 : Jarak antara pinggul dengan pusat massa segmen punggung
(m)
D6 : Panjang segmen punggung (m)
MC : Momen pada segmen lengan atas (Nm)
MD : Momen pada pinggul (Nm)
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
g w F F F F F F F F Fy CD C D CD C D D CD C . + = + = = + − − =
∑
2 2 0 2 0 FD = 2 . 46,41 + 53,144 . 10 = 92,82 + 531,44 = 624,26 N C CD C D D C CD C M D F D F M M M D F D F M − + = = + + − − =∑
θ θ θ θ cos . . cos . . cos . . cos . . 5 6 2 0 5 6 2 0 MD = { 2 . 41,46 . 0,49824 . cos 90° } + { 531,44 . 0,2291904 . cos 90° } - [ -7,717827478 ] = 0 + 0 + 7,717827478 = 7,717827478 NmTabel 3.12 Tabel Gaya dan Momen Posisi 2 Punggung Posisi 2 operat or FD (N) MD (Nm) Yanuar 624,26 7,7178274 78 Izzudin 487.06 27.9265647 Ferrizal 555.66 6.830005235
3.1.4.3
Posisi 3 : Leg LiftGambar 3.7 Posisi lengan bawah pada Leg Lift Keterangan :
wA : Berat beban pada tangan (kg)
wAB : Berat segmen (kg)
FA : Gaya pada pergelangan tangan (N)
FAB : Gaya pada pusat massa segmen lengan bawah (N)
FB : Gaya pada siku (N)
θ : Sudut antara lengan bawah dengan bidang horisontal
D1 : Jarak antara siku dengan pusat massa segmen lengan bawah
(m)
D2 : Panjang segmen lengan bawah (m)
MB : Momen pada siku (Nm)
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
∑
Fy =0 0 2 / − + = −FA FAB FB AB A BF
F
F
=
/
2
+
FB = { WA . g / 2 } + { WAB . g } = { 62,6 . 10 / 2 } + { 2,093 . 10 } = 313 + 20,93 = 333,93 N∑
M =0 0 2 / 2 − 1 + = −FA D Cosθ FABDCosθ MB MB = FA / 2 . D2 . cosθ
+ FAB x D1 . cosθ
= { 313 . 0,45845 . cos 260° } + { 20,93 . 0,1879645 . cos 260° } = -24,91762 – [-0,83310]F
AW
AF
ABW
ABAB
A
B
260°
D
2D
1F
B= -24,08452 Nm
Tabel 3.1.3 Tabel Gaya dan Momen Posisi 3 Lengan Bawah Posisi 3 operat or FB (N) MB (Nm) Yanuar 333,93 24,08452 -Izzudin 301.33 -32.25665 67 Ferrizal 293.63 13.94955 492 Lengan atas
Gambar 3.8 Posisi lengan atas pada Leg Lift Keterangan :
wBC : Berat segmen lengan atas (kg)
FB : Gaya pada segmen lengan bawah (N)
FBC : Gaya pada pusat massa segmen lengan atas (N)
FC : Gaya pada bahu (N)
θ : Sudut antara segmen lengan atas dengan bidang horisontal D3 : Jarak antara bahu dengan pusat massa segmen lengan atas (m)
D4 : Panjang segmen lengan atas (m)
MB : Momen pada segmen lengan bawah (Nm)
MC : Momen pada bahu (Nm)
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
=
∑
F
B CW
BCBC
B
C
260°
D
4D
3F
CF
B260°
Fc = 333,93 + [ WBC x g ] = 333,93 + [ 2,548 x 10 ] = 333,93 + 25,48 = 359,51 N B BC B C C B BC B M D F D F M M M D F D F M − + = = + + − − =
∑
θ
θ
θ
θ
cos . 3 . cos . 4 . 0 cos . 3 . cos . 4 . 0 MC = { 333,93 . 0,28372 . cos 90° } + { 25,48 . 0,1361856 . cos 90° } – (-24,08452) = 0 + 0 + 24,08452 = 24,08452 NmTabel 3.14 Tabel Gaya dan Momen Posisi 3 Lengan Atas Posisi 3 operat or FC (N) MC (Nm) Yanuar 359,51 24,08452 Izzudin 321.2 1 85.20989 435 Ferrizal 316.31 -99.76343 087 Punggung
Gambar 3.9 Posisi punggung pada Leg Lift Keterangan :
WCD : Berat segmen punggung (kg)
FC : Gaya pada segmen lengan atas (N)
FCD : Gaya pada pusat massa segmen punggung (N)
FD : Gaya pada segmen punggung (N)
θ : Sudut antara segmen punggung dengan bidang horisontal
F
CDW
CDCD
D
65°
D
6D
5F
CF
D65
°
C
D5 : Jarak antara pinggul dengan pusat massa segmen punggung
(m)
D6 : Panjang segmen punggung (m)
MC : Momen pada segmen lengan atas (Nm)
MD : Momen pada pinggul (Nm)
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
g w F F F F F F F F Fy CD C D CD C D D CD C . + = + = = + − − =
∑
2 2 0 2 0 FD = 2 . 359,51 + 53,144 . 10 = 1250,46 N C CD C D D C CD C M D F D F M M M D F D F M − + = = + + − − =∑
θ θ θ θ cos . . cos . . cos . . cos . . 5 6 2 0 5 6 2 0 MD = {2 . 359,51 . 0,49824 . cos 65°} + {531,44 . 0,2291904 . cos 65°} - 24,08452 = - 443.0170988 NmTabel 3.15 Tabel Gaya dan Momen Posisi 3 Punggung Posisi 3 operat or FD (N) MD (Nm) Yanuar 1250,46 - 443.01709 88 Izzudin 1057.06 347.66035 -Ferrizal 1105.66 506.1725634
3.1.4.4
Posisi 4 : Floor Lift Lengan bawahGambar 3.10 Posisi lengan bawah pada Floor Lift Keterangan :
wA : Berat beban pada tangan (kg)
wAB : Berat segmen (kg)
FA : Gaya pada pergelangan tangan (N)
FAB : Gaya pada pusat massa segmen lengan bawah (N)
FB : Gaya pada siku (N)
θ : Sudut antara lengan bawah dengan bidang horisontal
D1 : Jarak antara siku dengan pusat massa segmen lengan bawah
(m)
D2 : Panjang segmen lengan bawah (m)
MB : Momen pada siku (Nm)
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
∑
Fy =0 0 2 / − + = −FA FAB FB AB A BF
F
F
=
/
2
+
FB = { WA . g / 2 } + { WAB . g } = { 20,3 . 10 / 2 } + { 2,093 . 10 } = 122,43 NF
AW
AF
ABW
ABAB
A
B
90
°
D
2D
1F
B∑
M =0 0 2 / 2 − 1 + = −FA D Cosθ FABDCosθ MB MB = FA / 2 . D2 . cosθ
+ FAB x D1 . cosθ
= { 101,5 . 0,45845 . cos 90° } + { 20,93 . 0,1879645 . cos 90° } = 0 NmTabel 3.17 Tabel Gaya dan Momen Posisi 4 Lengan Bawah Posisi 4 operat or FB (N) MB (Nm) Yanuar 122,43 0 Izzudin 141.33 60.3428864 6 Ferrizal 276.9635 -42.2645367 9 Lengan atas
Gambar 3.11 Posisi lengan atas pada Floor Lift Keterangan :
wBC : Berat segmen lengan atas (kg)
FB : Gaya pada segmen lengan bawah (N)
FBC : Gaya pada pusat massa segmen lengan atas (N)
FC : Gaya pada bahu (N)
θ : Sudut antara segmen lengan atas dengan bidang horisontal D3 : Jarak antara bahu dengan pusat massa segmen lengan atas (m)
D4 : Panjang segmen lengan atas (m)
F
BCW
BCB
C
B
C
100
°
D
4D
3F
CF
B100°
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
g w F F F F F F F F Fy BC B C BC B C C BC B . + = + = = + − − =
∑
0 0 Fc = 122,43 + [ WBC . g ] = 122,43 + [ 2,548 . 10 ] = 122,43 + 25,48 = 147,91 N B BC B C C B BC B M D F D F M M M D F D F M − + = = + + − − =∑
θ
θ
θ
θ
cos . 3 . cos . 4 . 0 cos . 3 . cos . 4 . 0 MC = { 122,43 . 0,28372 . cos 100° } + { 25,48 . 0,1361856 . cos 100° } – 0 = -6,634376 NmTabel 3.18 Tabel Gaya dan Momen Posisi 4 Lengan Atas Posisi 4 operat or FC (N) MC (Nm) Yanuar 147,91 -6,634376 Izzudin 161.21 -100.2875526 Ferrizal 299.6435 33.30145689 Punggung
Gambar 3.12 Posisi punggung pada Floor Lift Keterangan :
WCD : Berat segmen punggung (kg)
FC : Gaya pada segmen lengan atas (N)
FCD : Gaya pada pusat massa segmen punggung (N)
C
F
CDW
CDCD
D
75°
D
6D
5F
CF
D75°
FD : Gaya pada segmen punggung (N)
θ : Sudut antara segmen punggung dengan bidang horisontal
D5 : Jarak antara pinggul dengan pusat massa segmen punggung
(m)
D6 : Panjang segmen punggung (m)
MC : Momen pada segmen lengan atas (Nm)
MD : Momen pada pinggul (Nm)
∑
Fx =0Karena tidak ada gaya yang bekerja pada sumbu x, maka Fx = 0
g w F F F F F F F F Fy CD C D CD C D D CD C . + = + = = + − − =
∑
2 2 0 2 0 FD = 2 . 147,91 + 53,144 . 10 = 827 N C CD C D D C CD C M D F D F M M M D F D F M − + = = + + − − =∑
θ θ θ θ cos . . cos . . cos . . cos . . 5 6 2 0 5 6 2 0 MD = {2 . 147,91 . 0,49824 . cos 75°} + {531,44 . 0,2291904 . cos 75° } – (-6,634376) = 76,305953 NmTabel 3.19 Tabel Gaya dan Momen Posisi 4 Punggung Posisi 4 operat or FD (N) MD (Nm) Yanuar 827 76,305953 Izzudin 737.06 -130.5517208 Ferrizal 1072.327 357.1743159 3.1.5 Analisa Posisi dan Daya Angkat
3.1.5.1 Posisi Optimum
Posisi yang memiliki daya angkat optimum adalah posisi yang memiliki nilai FD / MD terbesar. Untuk operator Yanuar, memiliki daya
angkat optimum pada posisi 4,yaitu Floor Lift, lalu pada operator Izzudin, memiliki daya angkat optimum pada posisi 2, yaitu High Far
Lift, sedangkan pada operator Ferrizal memiliki daya angkut optimum
pada posisi 3, yaitu Leg Lift. 3.1.5.2 Posisi Maksimum
Posisi yang memiliki daya angkat maksimum adalah posisi yang memiliki nilai FD terbesar. Dari semua operator yang telah melakukan
pengambilan data, semuanya memiliki posisi yang sama untuk posisi maksimum, yaitu posisi 3, Leg Lift.
pengambilan data, semuanya memiliki posisi yang sama untuk posisi aman, yaitu posisi 1, Arm Lift.
3.1.5.4
Posisi Back InjuryPosisi menyebabkan back injury yaitu posisi yang memiliki nilai MD
(momen pada pinggul) terbesar. Untuk operator Yanuar, posisi yang dapat mengakibatkan Back Injury yaitu pada posisi 4,yaitu Floor Lift, lalu pada operator Izzudin, posisi yang dapat mengakibatkan Back
Injury yaitu pada posisi 2, yaitu High Far Lift, sedangkan pada
operator Ferrizal posisi yang dapat mengakibatkan Back Injury yaitu pada posisi 3, yaitu Leg Lift.
3.2 Psychological Performance
Berikut akan dijelaskan mengenai Psychological Performance, cara mengitung Konsumsi Energi, Recovery Time dan waktu istirahat pada semua operator.
3.2.1
Definisi Psychological Performance dan aplikasinyaPsychological Performance adalah kemampuan fisik manusia dalam
melakukan kerja, sehingga kita dapat mengetahui batas kemampuan fisik manusia dalam melakukan kerja tertentu. Aplikasi Psychological
Performance dalam ergonomi adalah menentukan waktu recovery time serta mengetahui besar konsumsi energi yang diperlukan dalam
melakukan aktivitas tertentu.
3.2.2
Rekap Data Heart Rate normal, saat dan Setelah Aktivitas Tabel 3.20 Rekap Data Heart Rate normal dan berat badan operatorTabel 3.21 Rekap Data Heart Rate setelah aktivitas
Tabel 3.22 Rekap Data Heart Rate saat aktivitas
II-25
Operator Berat (kg) HR Normal
Zaki 66,5 110 Hendrick 50 101 Dimas WP 50 98 Hesti 41 103 Santi 49 101 Dewi 60 97 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 Zaki 66,5 110110123135163168168178184184173170189195190196196183163159159159159 199202 196 202202 202 202 H endrick 50 96 96 96 96 95 95 104144147151141121137148167142122108104 87 86 93 110 129 137 151 148 173 184 145 D im as W P 50 123126131121108112108 94 94 99 96 93 96 99 10310010499 105106107121121 107 105 114 129 118 113 114 H esti 41 149140147134118110113128128147137117101107103103106108108 99 94 100 99 111 108 109 120 137 128 109 Sant i 49 145157162167193176171159146161166181176157157142146139142127125144159 142 142 127 127 136 139 142 D ew i 60 110122131147147140118136132133132136120114120128133131131120111128120 115 136 115 125 130 115 115 H R Saat A ktivitas Berat (Kg) Operat or
1 2 3 4 5 6 7 8 9 10 1 1 12 13 14 1 5 16 17 18 19 20 2 1 22 23 24 25 26 27 28 29 30
Zaki
66,5 1901841731681631631631 6316 316316316316317315 51511311281311231231 27127 127127 1 26 1201 20 123 123
H e n d rick 50
1 42124124124124124124124 89 81 89 92 1101011051 0811698 86 9 2 9 2 92 104 1 00 106 11 3 126 116 112 112
D im as W P 50
1 181061181691731731641641641 551 551511641481481 4814114114 113713 7141137 1 47 134 13 0 138 134 134 134
H e sti
41
96 93 97 1091631761661661661 471 531621571501571 5715315315 315315 3153150 1 50 146 16 2 145 142 142 153
San ti
49
1 361391271381531501361361501 361 301071261301271 3612712612 613012 2120107 1 21 120 12 0 125 125 121 117
D e w i
60
1 1189 93 1361661731731811601 641 511661551581481 4813714815 114113 7131147 1 41 126 13 7 132 137 137 137
O p e rato rB e rat (K g)
H R Se te lah A ktivitas
3.2.3 Rekap Data Berdasarkan Kategori Jenis Kelamin dan Berat Tabel 3.23 Rekap Data Berdasarkan kategori Jenis Kelamin dan Berat
3.2.4
Grafik Heart Rate terhadap WaktuGambar 3.2.1 Grafik Heart Rate terhadap Waktu berdasarkan jenis kelamin
Gambar 3.13 Grafik Heart Rate Terhadap Waktu Berdasarkan Jenis Kelamin Operator Berat (kg) Jenis Kelamin Kategori Berat
Zaki 66,5 Laki-Laki 66-80 Hendrick 50 Laki-Laki 35-50 Dimas WP 50 Laki-Laki 35-50 Hesti 41 Perempuan 35-50 Santi 49 Perempuan 35-50 Dewi 60 Perempuan 51-65
Gambar 3.14 Grafik Heart Rate Terhadap Waktu Berdasarkan Kategori Berat Badan Pria
Gambar 3.15 Grafik Heart Rate Terhadap Waktu Berdasarkan Kategori Berat Badan Perempuan
3.2.5
Perhitungan Recovery TimeContoh perhitungan recovery time pada operator zaki menggunakan ekstrapolasi:
Tabel 3.24 Tabel Heart Reart Operator
14 14 18 − − x = 45 x = 630 + 252 x = 19,6
Tabel 3.25 Rekap Data Recovery Time
II-27
10 detik ke-
HR
14
173
18
128
x
110
173 110 173 128 − −Recovery Time
10 detik ke
Zaki
110
19,6
Hendrick
101
14
Dimas WP
98
26,45
Hesti
103
16,06
Santi
101
10,41
Dewi
97
1,63
HR Normal
Operator
3.2.6 Perhitungan Waktu Istirahat
Setelah melakukan aktivitas treadmill, maka dilakukan penghitungan pengeluaran energi dengan menggunakan persamaan astuti. Perhitungan dilakukan dua kali untuk memperoleh energi pada saat istirahat (Y1) dan energi pada saat aktivitas (Y2).
Y(1,2) = 1,804 – 0,0229 X(1,2) + 4,717.10-4 X(1,2)2
Ket: Y1 = Energi pada saat istirahat
Y2 = Energi pada saat aktivitas X1 = Heart Rate Normal X2 = Heart Rate Aktivitas tertinggi Sebagai contoh:
Pada Operator Zaki, diketahui HR Normal = 110 dan HR saat aktivitas tertinggi = 190, maka:
Y1 = 1,804 – 0,0229 (110) + 4,717.10-4 (110)2
Y1 = 1,804 – 2,519 + 5,71
Y1 = 4,995 kilokalori per menit
Y2 = 1,804 – 0,0229 (202) + 4,717.10-4 (202)2
Y2 = 1,804 – 4,626+ 19,247
Y2 = 16,425 kilokalori per menit
Selanjutnya adalah menghitung Konsumsi Energi pada saat operator berlali di treadmill:
KE = Et – Ei
Ket: KE = Konsumsi Energi
Et = Y2 = Pengeluaran energi pada saat waktu kerja tertentu (kilokalori
per menit)
Ei = Y1 = Pengeluaran energi pada saat istirahat (kilokalori permenit)
Sebagai contoh:
Pada Operator Zaki, diketahui Et=16,425 dan Ei=4,995, maka: KE = 16,425 – 4,995
KE = 11,43 kilokalori per menit Berikut data hasil perhitungan KE pada Operator:
Tabel 3.26 Rekap Data Hasil perhitungan KE
II-28
Et
Ei
KE
Aktivitas
Normal (kcal/min) (kcal/min) (kcal/min)
Zaki
202
110
13,151
4,995
11,43
Hendrick
184
101
13.56
4,303
9,257
Dimas WP
129
98
6,699
4,09
2,609
Hesti
149
103
8,864
4,46
4,404
Santi
193
101
14,954
4,303
10,651
HR
Operator
Setelah mendapatkan nilai Konsumsi Energi untuk masing-masing operator, maka dilakukan perhitungan waktu istrirahat agar sejalan dengan beban kerja, yaitu dengan menggunakan persamaan Murrel:
Ket: R = Waktu istirahat ayng dibutuhkan (menit) T = Total waktu kerja
W = KE = konsumsi energy rata-rata untuk bekerja (kilokalori per menit) S = Pengeluaran energy rata-rata yang direkomendasikan
Sebagai contoh:
Pada operator zaki, diketahui KE=8,156, maka: R = 5 (11,43 – 5) 11,43 – 1,5 R = 5 (6,43) 9,93 R = 32,15 = 3,238 menit 9,93
Berikut data hasil perhitungan waktu istirahat pada operator: Tabel 3.27 Rekap Data Waktu Istirahat
3.2.7
Grafik Konsumsi Energi terhadap Heart Rate:II-29 5 , 1 ) ( − − = W S W T R
Waktu istirahat
(Menit)
Zaki
3,238
Hendrick
2,743
Dimas WP
-10,78
Hesti
0,696
Santi
3,634
Dewi
0,982
Operator
Gambar 3.17 Grafik Hubungan KE dengan HR Normal Untuk Perempuan Kategori Berat Badan
3.3 Manual Material Handling
3.3.1
Definisi dan deskripsi Aktivitas Manual Material HandlingManual Material Handling adalah suatu pekerjaan yang dilakukan oleh seseorang secara manual yang bisa berakibat cedera di bagian tubuh dikarenakan posisi kerja yang tidak baik. Dari alasan tersebut, maka dilakukan penelitian agar pada suatu proses kerja tidak terjadi cedera pada pekerja akibat posisi yang tidak mendukung dalam proses tersebut. Manual Material Handling berfokus kepada pengangkatan suatu beban. Apabila suatu beban pada proses pengangkatanya tidak sesuai dengan standard yang telah ditentukan, dianjurkan kepada pekerja untuk tidak melakukan proses pengangkatan agar tidak terjadi cedera. Maka dari itu, ditemukan metode yang digunakan untuk membantu suatu proses pengangkatan beban yang membantu mencegah atau mengurangi terjadinya low back pain dan injuries ( cedera tulang belakang bagian bawah ) bagi pekerja dalam melakukan aktivitas pengangkatan beban secara manual.Metode ini dinamakan NIOSH Lifting Index, yang terdiri dari RWL yaitu nilai beban angkat yang dianjurkan secara teoritis untuk Manual Material Handling, dan LI yaitu nilai estimasi dari tingkat tegangan dalam suatu kegitan Manual Material Handling. Dan pada penelitian kali ini, nilai LI yang diteliti apabila nilai LI yang didapatkan lebih daripada satu ( LI > 1 ) maka pada proses pengangkatan beban tersebut terjadi kesalahan yang berakibat cedera dan perlu perbaikan, begitu juga sebaliknya apabila LI kurang daripa satu ( LI < 1 ) maka proses pengangkatan beban tersebut sudah benar
3.3.2
Definisi RULA, REBA, JSI, OCRABerikut ini adalah penjelasan tentang RULA, REBA, JSI, OCRA
• RULA adalah metode pengukuran tubuh yang digunakan untuk mengestimasi resiko kerja yang berkaitan dengan gangguan yang dialami anggota tubuh bagian atas. Jadi metode RULA hanya terbatas menganalisa tubuh bagian atas. Aplikasi penggunaan RULA, terdapat pada biomekanika. Dimana biomekanika hanya menganalisa tubuh bagian atas saat melakukan proses kerja. Seperti contoh aplikasinya, saat seseorang mengangkat beban, digunakan metode RULA untuk menganalisa keadaan tubuh bagian atas. Contohnya dilakukan analisa pada punggung, badan, tangan, leher dan lain-lain.
• REBA adalah metode pengukuran tubuh yang digunakan untuk mengestimasi resiko kerja yang berkaitan dengan gangguan yang dialami seluruh bagian tubuh. Metode REBA tidak memiliki batasan dalam menganalisa, seperti metode lainya. Contoh aplikasi penggunaan REBA dapat dilihat dari contoh Manual Material Handling. Seperti contoh, pada saat proses kerja khususnya pada pengangkatan beban. Dapat dianalisa menggunakan metode REBA keadaan seluruh tubuh orang yang melakukan proses kerja tersebut. Analisa dapat dilakukan contohnya padaposisi tangan, punggung, leher, kepala, kaki dan lain-lain. Jadi analisa keseluruhan dapat
• JSI adalah metode untuk mengistimasi resiko terjadinya kecelakaan/sakit pada pergelangan tangan dan tangan yang berdasarkan pada berat, frekuensi dan durasi pembebanan.
Analisa mekanik adalah analisa mengenai tiga jenis gaya yang bekerja pada tubuh manusia menurut Winter, yaitu:
Gaya gravitasi: gaya yang melalui pusat massa dari segmen tubuh manusia dengan arah ke bawah.
Gaya reaksi: gaya yang terjadi akibat beban pada segmen tubuh atau berat segmen tubuh itu sendiri.
Gaya otot: gaya yang terjadi pada bagian sendi, baik akibat gesekan sendi atau akibat gaya pada otot yang melekat pada sendi. Gaya ini menggambarkan besarnya momen otot.
Contoh aplikasi penggunaan metode JSI, tentunya dapat dilihat dari proses pengangkatan beban. Dengan menggunakan metode ini dapat dianalisa maksimal beban yang diangkat oleh tangan, durasi kemampuan dari tangan untuk mengangkat suatu beban, dan kecepatan kerja dari tangan pada saat pengangkatan beban. Jadi, metode JSI ini hanya sebatas menganalisa bagian tubuh, khususnya pada tangan dan pergelangan tangan.
• OCRA pertama kali ditemukan oleh Occhipinti dan Colombini merupakan metode kuantitatif untuk mengidentifikasi cara kerja yang digunakan dalam pekerjaan berulang khusus alat gerak tubuh bagian atas. Metode ini mengklasifikasikan tingkat resiko pada tiga zona, yaitu zona tidak beresiko, zona agak beresiko, dan zona beresiko. Metode ini sama seperti metode sebelumnya, hanya terbatas menganalisa tubuh bagian atas. Tetapi, perbedaan metode ini terdapat pada pekerjaan yang dilakukan secara berulang-ulang. Contoh aplikasinya, seseorang yang mengangkat beban ke suatu tempat bolak-balik secara berulang dalam selang waktu tertentu. Disini dianalisa tubuh bagian atas, contohnya pada tangan.
3.3.3
Perhitungan Recommended Weight Limit (RWL)Persamaan Recommended Weight Limit (RWL) adalah sebagai berikut:
RWL = LC * HM * VM * DM * AM * FM * CM
Keterangan : LC = Load Constanta, (LC= 23 kg / 51 lbs) HM = Horizontal Multiplier, (HM= 25 / H)
VM = Vertical Multiplier, (VM =1 – 0,003 I V – 75 I) (VM max saat V=69 VM = 1 – 0,003 I V – 69 I) DM = Distance Multiplier, (DM= 0,82 + I 4,5 / D I) AM = Asymetry Multiplier, (AM= 1 – (0,0032 A) CM = Coupling Multiplier, (dilihat pada tabel) FM = Frequency Multiplier, (dilihat pada tabel)
Gambar 3.19 Tabel RWL
Pada percobaan Manual Material Handling, diketahui
• LC = 23 kg / 51 lbs • H (Origin) = 27 cm / 10.63 inch • HM (Origin) = 2.35 • H (Destination) = 41 cm / 16.15 inch • HM (Destination) = 1.55 • V (Origin) = 87 cm / 34.25 inch • VM (Origin) = 0.877 • V (Destination) = 57 cm / 22.44 inch • VM (Destination) = 0.842 • D = 30 cm / 11.81 inch • DM = 1.2 • A = 0 o • AM = 1 • C = fair • CM = 0.95
Rumus perhitungan RWL : RWL = LC * HM * VM * DM * AM * FM * CM RWL Origin : RWL = 51 * 2.35 * 0.877 * 1.2 * 1 * 0.45 * 0.95 RWL = 53.92 lbs RWL Destination : RWL = 51 * 1.55 * 0.842 * 1.2 * 1 * 0.45 * 0.95 RWL = 34.15 lbs
3.3.4
Perhitungan Lifting Index (LI)LI (Lifting Index) adalah menyatakan nilai estimasi dari tingkat tegangan dalam suatu kegiatan pengangkatan material secara manual yang dirumuskan dengan:
LI = L / RWL
Keterangan: L (Load Weight) = Berat beban yang diangkat (kg) Diketahui RWL (Destination) = 53.92 lbs
RWL (Origin) = 34.15 lbs Beban yang diangkat = 11 lbs
Besar LI (Lifting Index) pada saat mengangkat benda adalah: LI = 11 / 34.15
= 0.322
Besar LI (Lifting Index) pada saat meletakkan benda adalah: LI = 11 / 53.92
= 0.204
3.3.5
Hasil running dengan REBAERGO Intelligence merupakan sebuah software yang dapat digunakan untuk menganalisis suatu aktivitas manual material handling. Adapun
software ini terdiri dari bermacam-macam jenis didalamnya seperti
RULA, REBA, SI, OCRA. Dalam penelitian kali ini hanya digunakan satu jenis yang ada didalamnya, yaitu: REBA
Berdasarkan data yang didapatkan, maka dapat diketahui nilai (REBA) dengan menggunakan software ERGO Intelligence.
Gambar 3.20 Software REBA
Hasil perhitungan yang diperoleh dengan menggunakan software REBA adalah sebagai berikut :
Rapid Entire Body Assessment (REBA) Analyst: Rama
Job Name: Lift Buku Workstation ID: 4 Hand: Right Side
Job
Factors Categories ScoreREBA
Wrist > 15 1
Upper
Arms 46 to 90 2
Upper
Arms Arm is supported -1
Lower
Arms 60-100 1
Neck > 20 1
Trunk Neutral 2
Legs Legs/feet well-supported 1
Force >10 kg 0
Coupling Poor 1
Muscle
Use Repeated+4times/min 1
Arm+Wrist 1 1 2
REBA Grand Score: 3 Recommendation:
Action Level = 1 Risk Level = Low
Action (including further assessment) = May be necessary
BAB I V
ANALISA DAN INTERPRETASI DATA 4.1 Biomekanika
4.1.1 Analisa Hubungan Tiap Segmen Tubuh pada Tiap Posisi dengan Daya Angkat
Berdasarkan data yang didapat, pada :
1. Posisi 1 lengan bawah memberikan gaya yang lebih kecil daripada lengan atas yang keduanya diimbangi dengan gaya yang dihasilkan oleh punggung. Sedangkan momen yang terjadi yaitu lengan bawah menghasilkan momen positif yang sama dengan lengan atas, dan punggung juga menghasilkan momen dengan nilai sama akan tetapi berlawanan arah. Kondisi ini jelas tidak aman karena momen tidak seimbang antara lengan bawah dan atas dengan punggung. Kemungkinan operator akan jatuh ke belakang karena tidak seimbangnya momen yang dihasilkan.
2. Posisi 2 gaya yang dihasilkan pada lengan bawah tetap lebih kecil daripada lengan atas yang kemudian diimbangi oleh punggung. Akan tetapi memiliki perbedaan sedikit pada bagian momen. Lengan bawah menghasilkan momen positif ke arah operator begitu juga punggung. Tapi pada lengan atas dihasilkan momen yang negatif dan menyebabkan tidak seimbang momennya. Kemungkinan ini akan menyebabkan operator jatuh ke belakang.
3. Posisi 3 perbandingan gaya yang dihasilkan di tiap segmen tetap, punggung menghasilkan gaya terbesar. Sedangkan momen yang terjadi, punggung juga menghasilkan momen terbesar dan tidak seimbang sehingga membahayakan operator karena kemungkinan akan jatuh ke depan.
4. Posisi 4 kurang lebih sama perbandingan gaya seperti posisi sebelumnya, punggung mempunyai gaya terbesar untuk menopang tubuh. Sedangkan momennya punggung mempunyai nilai terbesar dan jika diperhitungkan, operator ada kemungkinan jatuh ke belakang karena tidak seimbangnya momen yang dihasilkan.
4.1.2 Analisa Posisi Optimum
Posisi yang memiliki daya angkat optimum adalah posisi yang memiliki nilai FD / MD terbesar. Untuk operator Yanuar, memiliki daya angkat
optimum pada posisi 4,yaitu Floor Lift. Pada posisi ini, operator menggunakan berat badan sebagai tumpuan tenaga untuk mengangkat beban, oleh sebab itu, dikarenakan operator memiliki berat badan yang cukup besar, yaitu 91 kg, mampu mengangkat beban dengan daya angkat optimum yang cukup besar dibandingkan posisi lainnya yang menggunakan tumpuan lain. Dan dengan menggunakan punggung
sebagai penopang tubuh, dalam posisi ini operator dapat dengan mudah mengangkat beban, tetapi, dengan posisi ini juga, operator memiliki kekurangan dalam posisi ini, yaitu jika operator tidak dalam keadaan seimbang dengan posisinya, operator memiliki kemungkinan untuk jatuh ke arah belakang karena operator dalam posisi jongkok dan tentu saja posisi ini rawan untuk terjadi kecelakaan dan juga membuat operator lebih cepat lelah dibandingkan posisi yang lainnya.
4.1.3 Analisa Posisi Maksimum
Posisi yang memiliki daya angkat maksimum adalah posisi yang memiliki nilai FD terbesar. Dari operator Yanuar, untuk posisi maksimum,
yaitu posisi 3, Leg Lift. Pada posisi ini, tubuh menggunakan punggung sebagai tumpuannya, ditambah pula dengan berat badan sebagai sumber tenaga untuk mengangkat beban, sehingga menghasilkan momen yang lebih besar daripada segmen yang lainnya. Selain menggunakan punggung sebagai tumpuan, kaki operator juga memiliki kegunaan untuk tumpuan badan sehingga operator lebih seimbang untuk posisi belakang tubuh, akan tetapi, untuk bagian depan tubuh, keseimbangan operator masih kurang karena dalam posisi ini, operator sedikit membungkuk ke arah depan, sehingga jika operator kurang hati – hati, bisa mengakibatkan operator jatuh ke arah depan.
4.1.4 Analisa Posisi Aman
Posisi paling aman yaitu posisi yang memiliki nilai MD (momen pada
pinggul) terkecil. Dari operator Yanuar, untuk posisi aman, yaitu menggunakan posisi 1, Arm Lift. Posisi ini menggunakan lengan atas dan lengan bawah sebagai tumpuan untuk mengangkat beban dan juga posisi tubuh operator adalah tegak sehingga keseimbangan operator lebih stabil daripada keseimbangan dengan menggunakan posisi yang lain. Akan tetapi, posisi ini meskipun aman bagi operator, memiliki kekurangan yaitu merupakan posisi yang memiliki daya angkat yang paling kecil dibandingkan dengan posisi yang lainnya. Oleh karena itu, posisi ini tidak cocok untuk digunakan oleh operator jika ingin mengangkat beban karena momennya paling kecil.
4.1.5
Analisa Posisi Back InjuryPosisi back injury yaitu posisi yang memiliki nilai MD (momen pada
pinggul) terbesar. Untuk operator Yanuar, posisi yang dapat mengakibatkan Back Injury yaitu pada posisi 4,yaitu Floor Lift. Pada posisi ini, posisi tubuh operator sedikit jongkok dan membungkuk. Meskipun pada posisi ini operator memiliki daya angkat yang lebih besar dibandingkan posisi yang lainnya, jika digunakan secara terus menerus akan dapat menyebabkan cedera karena posisi ini menggunakan punggung sebagai titik tumpuannya, selain itu juga, karena dalam posisi jongkok, pinggul dari operator juga mengalami stress yang berat karena harus menopan berat badan tubuh operator saat dalam posisi jongkok.
4.2 Psychological Performance
4.2.1
Analisa Perbandingan Heart Rate Sebelum dan Setelah Aktivitasmelakukan kerja sehingga konsumsi energi yang dibutuhkan lebih tinggi dan akan berpengaruh terhadap kenaikan Heart Rate. Ketika setelah aktivitas Heart Rate operator perlahan menurun menuju kondisi Heart
Rate normalnya, sebab waktu setelah aktivitas konsumsi energi menjadi
sedikit sehingga Heart Rate akan menuju kondisi normal, naumn pada beberapa operator dalam kurun waktu lima menit belum juga mencapai
Heart Rate normalnya, sehingga dibutuhkan waktu lebih dari lima menit
untuk kembali ke Heart Rate normalnya.
4.2.2
Analisa Recovery TimePada analisis Recovery Time berdasarkan data Heart Rate setelah aktivitas dapat dilihat bahwa operator mengalami penurunan Heart Rate stabil dari 190 menjadi 123 dalam waktu 5 menit. Selama 5 menit operator belum bisa mencapai Heart Rate normal yaitu 110 dikarenakan waktu istirahat kurang lama atau butuh lebih dari 5 menit.
4.2.3 Analisa Waktu Istirahat
Pada perhitungan waktu istirahat, dapat dilihat bahwa terdapat variasi waktu istirahat antara 0,696 menit hingga 3,238 menit. Perbedaan ini disebabkan oleh perbedaan heart rate normal, heart rate pada saat aktifitas serta tingkat konsumsi energi praktikan. Salah satu praktikan juga mendapat nilai negatif dalam perhitungan waktu istirahat, yang diakibatkan tingkat konsumsi energi yang dimiliki lebih rendah dibandingkan konsumsi energi yang direkomendasikan.
4.2.4
Analisa Pengaruh Berat Badan dan Jenis Kelamin terhadap HeartRate
Berdasarkan hasil pengamatan, berat badan dan jenis kelamin berpengaruh terhadap intensitas heart rate. Dari data yang didapat, ada dua kelompok berat badan, yakni 33-50 dan 66-80 untuk pria, serta 35-50 dan 51-65 untuk wanita.
Praktikan pria yang memiliki berat antara 35-50 Kg, memiliki heart rate normal yang lebih kecil dibandingkan praktikan pria dengan berat badan 66-80 Kg. Begitupula praktikan wanita yang memiliki berat badan antara 35-50 Kg, memiliki heart rate lebih kecil dibandingan praktikan wanita dengan berat badan 51-65 Kg. Dari segi jenis kelamin, praktikan pria memilki kisaran heart rate antara 98-110, sedangkan praktikan wanita antara 97-103. Jadi, praktikan pria cenderung memiliki heart rate normal yang lebih tinggi dibandingkan praktikan wanita.
Hal ini disebabkan karena semakin tinggi berat badan manusia, maka semakin tinggi pula laju metabolismenya. Laju metabolisme itu sendiri ada kaitannya dengan heart rate yang mereka miliki. Kebutuhan akan energy yang lebih besar, membuat jantung bekerja lebih ekstra pada kondisi normal. Perbedaan jenis kelamin antara pria dan wanita juga membuat perbedaan heart rate, karena pria dan wanita memilki ukuran organ, aktifitas, dan dimensi tubuh yang berbeda. Pria memiliki rata-rata dimensi tubuh yang lebih besar, serta aktifitas harian yang lebih berat dibandingkan wanita. Sehingga, laju heart rate pria, menjadi cenderung lebih besar.
4.2.5 Analisa Pengaruh Berat Badan dan Jenis Kelamin terhadap Konsumsi Energi
Berat badan dan jenis kelamin juga mempunyai pengaruh yang serupa pada konsumsi energi. Dari hasil pengamatan, praktikan pria dengan berat badan 35-50 Kg memliki konsumsi energi yang lebih rendah dibandingkan praktikan dengan berat badan 66-80 Kg dalam margin 2-8. Sedangkan konsumsi energi pada praktikan wanita yang memilki berat badan antara 35-50 Kg cenderung lebih besar dibandingkan praktikan dengan berat badan 51-65 Kg.
Dari segi jenis kelamin, praktikan pria memiliki kisaran konsumsi energi antara 2,6-11,4. Sementara konsumsi energi praktikan wanita berada pada kisaran antara 4,4-10,6. Jadi, praktikan pria cenderung memiliki konsumsi energi yang lebih tinggi, namun lebih variatif dibandingkan praktikan wanita. Perbedaan berat badan terhadap konsumsi energi tidak lepas dari heart rate yang dimiliki. Karena, rumus yang digunakan untuk menghitung konsumsi energi membutuhkan data heart rate. Sehingga logikanya, manusia dengan heart rate yang tinggi akan mempunyai konsumsi energi yang besar pula. Berat badan juga mencerminkan porsi kebutuhan energi tubuh. Dan seperti yang telah dijelaskan sebelumnya, berat badan yang lebih besar, cenderung membutuhkan energi yang lebih besar pula untuk metabolisme tubuh.
Pada praktikan wanita, kelompok berat badan 51-65 Kg memilki konsumsi energi yang lebih rendah karena disebabkan variasi heart rate maksimal dan normal yang lebih kecil. Hal ini sedikit berbeda dengan teori karena pada saat pengamatan, banyak faktor yang mempengaruhi, seperti kesehatan praktikan. Selain itu, kelompok berat badan ini hanya diwakilkan oleh satu praktikan saja. Perbedaan jenis kelamin dapat mempengaruhi konsumsi energi karena pria cenderung membutuhkan energi yang lebih besar dibandingkan wanita, karena postur tubuh yang lebih besar. Namun variasi konsumsi energi pria pada pengamatan lebih besar dibandingkan wanita. Hal ini disebabkan karena pada saat pengamatan, banyak faktor yang tidak diukur, salah satunya kesehatan praktikan, serta kebiasaan (pola hidup). Yang membuat perbedaan konsumsi energi semakin bervariasi.
4.2.6
Analisa Perbandingan Recovery Time dengan Waktu IstirahatBerdasarkan data hasil pengamatan, recovery time praktikan cukup bervariasi. Dari 10 detik ke-1,63 hingga 10 detik ke-26,45. Sedangkan perhitungan waktu istirahat berkisar antara -10,78 hingga 3,634 menit.
Pada perhitungan recovery time, data yang digunakan adalah pada saat praktikan mencapai titik heart rate normal. Beberapa praktikan memerlukan recovery time dibawah 2 menit, namun ada pula yang sampai di atas 6 menit. Hal ini diakibatkan oleh kondisi fisik tiap praktikan yang berbeda. Semakin fit kondisi praktikan, maka semakin cepat ia menormalkan denyut jantung.
Sedangkan perhitungan waktu istirahat, berkaitan dengan konsumsi energi untuk tiap praktikan. Pada praktikan ketiga, perhitungan waktu istirahat adalah -10,78 menit. Hal ini dikarenakan konsumsi energi (KE)
4.3 Manual Material Handling
4.3.1 Analisa RWL
Telah dilakukan uji RWL pada operator, dan diperoleh data dari percobaan dan perhitungan tersebut. Data yang diperoleh terdapat dua jenis data yang berbeda, yaitu data RWL Origin dan data RWL Destination. Faktor penting yang membuat perbedaan pada data tersebut adalah jarak VM (Vertikal) dan HM (Horizontal) pada posisi origin maupun destination berbeda. Sedangkan pada data yang lain seperti LC, DM, AM, CM dan FM tetap sama, ini dikarenakan pada posisi origin maupun destination memiliki banyak kesamaan pada data tersebut seperti besar sudut putar dan tingkat genggaman. tingkat genggaman yang didapat pada percobaan kali ini adalah fair. Ini dikarenakan beban yang diangkat, tidak memiliki suatu pegangan yang nyaman, dimana suatu pegangan pada beban akan meningkatkan tingkat genggaman menjadi good. Begitu juga sebaliknya, apabila beban tidak mempunyai pegangan dan ada gangguan yang menghambat pegangan, tingkat pegangan tesebut akan bersifat poor. Setelah melakukan proses perhitungan dengan menggunakan rumus yang telah ditetapkan NIOSH Lifting Index, ditemuan nilai RWL
origin sebesar dan RWL destination sebesar . Nilai RWL sangat
berpengaruh kepada nilai LI yang didapatkan nanti. Karena jika harga suatu nilai RWL besar mendekati harga nilai beban (L), maka nilai LI yang didapatkan akan semakin kecil dan itu akan berakibat baik. Begitu juga sebaliknya apabila harga nilai RWL yang didapatkan kecil, menjauhi nilai beban (L), maka nilai LI yang didapatkan akan semakin besar, dan itu akan berakibat buruk. Jadi, jika nilai RWL makin besar, itu akan menjadi lebih baik. Dan sebaliknya jika RWL makin kecil itu akan berakibat buruk. 4.3.2 Analisa LI
LI (Lifting Index) adalah menyatakan nilai estimasi dari tingkat tegangan dalam suatu kegiatan pengangkatan material secara manual. Perhitungan LI dibagi menjadi dua yakni pada saat mengangkat dan meletakkan beban. Semakin mendekati nilai 1, maka semakin maksimal tingkat tegangan yang dialami oleh pekerja. Sedangkan apabila angka tersebut melebihi dari 1, maka artinya beban yang diangkat sudah melewati dari batas berat yang direkomendasikan (RWL). Nilai LI
destination memiliki nilai lebih daripada 1 ( LI > 1 ) juga berarti posisi
pengangkatan masih memiliki potensi yang menyebabkan cedera yang lebih besar daripada posisi origin. Jadi, di kedua posisi pengangkatan baik
origin dan destination masih salah dan masih perlu perbaikan agar tidak
terjadi cedera
Nilai LI pada saat mengangkat lebih kecil dibandingkan pada saat meletakkan karena nilai RWL saat mengangkat lebih tinggi. Atau dengan kata lain, beban maksimum yang mampu diangkat pada saat awal lebih tinggi. Artinya, estimasi tingkat tegangan pada saat meletakkan beban lebih besar dibandingkan saat mengangkat.
4.3.3 Analisa REBA
Berdasarkan running REBA dengan menggunakan software ERGO Intelligence, nilai REBA yang didapat adalah 3. Dan kegiatan yang dianalisa memiliki resiko kecelakaan yang rendah. Perbaikan sistem
mungkin untuk dilakukan. Perbaikan baru diperlukan ketika nilai reba yang didapatkan di atas 4.
Tabel 4.1 Tabel REBA Score
Dari nilai REBA yang didapat pada setiap bagian tubuh, maka dapat
diidentifikasi bahwa posisi lengan atas, dan posisi badan mendapat nilai 2, bagian ini memerlukan adanya perbaikan.
Action
Level REBA Score Risk Level further assessment)Action (including
0 1 Negligible None necessary
1 2-3 Low May be necessary
2 4-7 Medium Necessary
3 8-10 High Necessary soon
BAB V
SIMPULAN DAN SARAN 5.1 Simpulan
Simpulan dari hasil praktikum modul 2 adalah sebagai berikut:
1.
Posisi 1 lengan bawah memberikan gaya yang lebih kecil daripada lengan atas yang keduanya diimbangi dengan gaya yang dihasilkan oleh punggung. Posisi 2 gaya yang dihasilkan pada lengan bawah tetap lebih kecil daripada lengan atas yang kemudian diimbangi oleh punggung. Posisi 3 perbandingan gaya yang dihasilkan di tiap segmen tetap, punggung menghasilkan gaya terbesar. Posisi 4 kurang lebih sama perbandingan gaya seperti posisi sebelumnya, punggung mempunyai gaya terbesar untuk menopang tubuh.2.
Posisi yang memiliki daya angkat optimum adalah posisi yang memiliki nilai FD / MD terbesar. Untuk operator Yanuar, memiliki daya angkatoptimum pada posisi 4,yaitu Floor Lift. Posisi paling aman yaitu posisi yang memiliki nilai MD (momen pada pinggul) terkecil. Dari operator Yanuar,
untuk posisi aman, yaitu menggunakan posisi 1, Arm Lift. Posisi back
injury yaitu posisi yang memiliki nilai MD (momen pada pinggul) terbesar.
Untuk operator Yanuar, posisi yang dapat mengakibatkan Back Injury yaitu pada posisi 4,yaitu Floor Lift.
3.
Heart rate praktikan sebelum aktifitas dan sesudah aktifitas cenderung4.
Berdasarkan data hasil pengamatan, recovery time praktikan cukup bervariasi. Dari 10 detik ke-1,63 hingga 10 detik ke-26,45. Sedangkan perhitungan waktu istirahat berkisar antara -10,78 hingga 3,634 menit. 5. Semakin tinggi berat badan seseorang, maka konsumsi energinya akansemakin tinggi pula. Serta, pria memiliki tingkat konsumsi energi yang lebih besar dibandingkan wanita.
6.
Semakin tinggi berat badan seseorang, maka tingkat heart rate akan semakin tinggi pula. Serta, pria memiliki tingkat heart rate yang lebih besar dibandingkan wanita..7.
Dari hasil pengamatan, semakin tinggi konsumsi energi praktikan, maka akan berbanding lurus dengan tingkat heart rate yang dimiliki..8. Nilai LI (Lifting Index) yang didapatkan ada dua, yakni saat mengangkat beban dan saat meletakkan beban. LI pada saat mengangkat beban adalah 0.204, sedangkan LI saat meletakkan beban adalah 0.322.
5.2 Saran
Saran dari kelompok kami untuk praktikum modul 2 adalah: