BAB II DASAR TEORI
Pada bab ini akan dibahas beberapa teori pendukung yang digunakan sebagai acuan dalam merealisasikan sistem. Teori-teori yang digunakan dalam pembuatan skripsi ini terdiri dari mikrokontroler Arduino Uno, Motor DC Pololu with Rotary Encoder,driver L298P V1.2., PID controller, dan GUI Matlab.
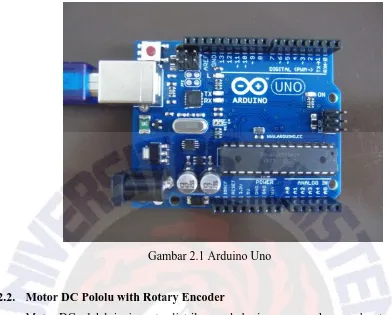
2.1. Arduino Uno
Arduino UNO adalah sebuah board mikrokontroler yang didasarkan pada ATmega328, Arduino UNO mempunyai 14 pin digital input/output (6 di antaranya dapat digunakan sebagai output PWM), 6 input analog, sebuah osilator Kristal 16 MHz, sebuah koneksi USB, sebuah power jack,dan sebuah tombol reset. Secara lengkap spesifikasi dari Arduino Uno adalah sebagai berikut.
1. Microcontroller : ATmega328 2. Operating Voltage : 5V
3. Input Voltage (recommended) : 7-12V 4. Input Voltage (limits) : 6-20V
5. Digital I/O Pins : 14 (of which 6 provide PWM output) 6. Analog Input Pins : 6
7. DC Current per I/O Pin : 40 mA 8. DC Current for 3.3V Pin : 50 mA
9. Flash Memory : 32 KB (ATmega328) of which 0.5 KB used by bootloader 10. SRAM : 2 KB
Gambar 2.1 Arduino Uno
2.2. Motor DC Pololu with Rotary Encoder
Motor DC adalah jenis motor listrik yang bekerja menggunakan sumber tegangan DC. Motor DC memiliki komponen utama seperti kutub medan magnet, kumparan Motor DC, commutator Motor DC. Berikut merupakan spesifikasi motor yang digunakan:
1. Gear Ratio : 9.68:1
2. Free-run speed @ 6V : 385rpm 3. Stall current @ 6V : 1050mA
4. Stall torque @ 6V : 11 oz-in 5. Free-run speed @ 12V : 770rpm 6. Free-run current @ 12V : 200mA 7. Stall Current @ 12V : 2100mA
8. Stall torque @ 12V : 22 oz-in (1.6 kg-cm) 9. Lead Length : 8 in
10.Motor Type : 2.1A stall @ 12V (MP 12V)
Gambar 2.2 Motor DC with Encoder
Dari spesifikasi diatas, motor DC yang digunakan membutuhkan tegangan 12V untuk kecepatan maksimum. Sehingga dibutuhkan driver motor untuk dapat memberikan tegangan sebesar 12V. Kontroller yang digunakan adalah arduino UNO yang memiliki alokasi data 8 bit sehingga terdapat nilai pwm berkisar 0-255. Dan hubungan antara motor dengan pwm adalah sebagai berikut.
Gambar 2.3 Grafik duty cycle pwm
� = + �� (1)
A = Lama waktu on B = Lama waktu off Vs = Tegangan sumber Vrms = tegangan rata-rata
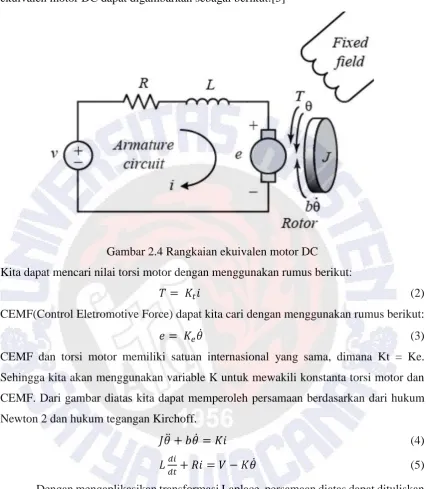
Actuator pada sistem kendali biasanya berupa motor DC. Rangkaian elektrik ekuivalen motor DC dapat digambarkan sebagai berikut:[5]
Gambar 2.4 Rangkaian ekuivalen motor DC
Kita dapat mencari nilai torsi motor dengan menggunakan rumus berikut:
� = � (2)
CEMF(Control Eletromotive Force) dapat kita cari dengan menggunakan rumus berikut:
= � (3)
CEMF dan torsi motor memiliki satuan internasional yang sama, dimana Kt = Ke. Sehingga kita akan menggunakan variable K untuk mewakili konstanta torsi motor dan CEMF. Dari gambar diatas kita dapat memperoleh persamaan berdasarkan dari hukum Newton 2 dan hukum tegangan Kirchoff.
� + � = � (4)
�
+ �� = � − � (5)
Dengan mengaplikasikan transformasi Laplace, persamaan diatas dapat dituliskan kedalam bentuk Laplace-nya. Sebagai berikut:
+ Ө = (6)
+ � = � − Ө (7)
Kita samapi pada persamaan transfer function open-loop dengan mengeliminasi I(s) pada persamaan diatas, yang mana kecepatan putar dianggap sebagai keluaran dan tegangan
armature sebagai masukan.
Sensor rotary encoder pada motor ini bekerja sebagai sensor kecepatan putar. Sensor ini membutuhkan tegangan dari 3.5V hingga 20V dan memiliki 48 counts per revolution (CPR). Akurasi perhitungan sensor tersebut cukup tinggi dikarenakan terdapat 2 sensor optik yang membaca arah putar dengan sudut yang berbeda, biasanya dinamai dengan channel A dan channel B. Berikut merupakan keluaran sinyal dari channel A dan channel B.
Gambar 2.5 Perubahan Pulsa Channel A dan Channel B
2.3. Magnetic Brake
Magnetic brake memiliki dua jenis tipe antara lain dengan gesekan dan tanpa gesekan. Pada trainer yang akan dibuat, magnetic brake akan berguna sebagai gangguan kecepatan motor nantinya. Magnetic brake yang digunakan disini tanpa adanya gesekan atau sering dikenal dengan eddy current brake. Eddy current brake sebenarnya sangatlah canggih akan tetapi yang akan saya jelaskan prinsip kerjanya sama. Pertama kali dikenalkan pada abad 19th oleh ahli fisika asal Perancis bernama Jean-Bernard Leon Foucault. Eddy current brake pada dasarnya terdapat dua jenis yaitu linear dan circular.
Gambar 2.7 Eddy Current Brake Circular [7]
Untuk trainer kali ini yang digunakan adalah jenis eddy current brake circular. Keuntungan dari penggunaan jenis tersebut yaitu tidak adanya gesekan sehingga tidak ada zat-zat kimia yang berbahaya bagi lingkungan akibat dari gesekan tersebut. eddy current brake sudah banyak diaplikasikan terutama pada roller coaster maupun kereta cepat seperti shinkansen dijepang. Berikut merupakan magnetic brake yang akan digunakan sebagai gangguan.
Gambar 2.8 Alat Magnetic Brake Circular
Untuk peletakan piringan motor DC terhadap gangguan terlihat pada Gambar 2.6. Peletakan magnetic brake tidak seperti pada umumnya yang terlihat pada Gambar 2.4. Hal tersebut diakibatkan dari piringan ataupun poros motor DC yang tidak berputar lurus dan stabil sehingga menyebabkan pemasangan harus dilakukan diluar celah magnetic brake.
2.4. Driver 2A Shield for Arduino
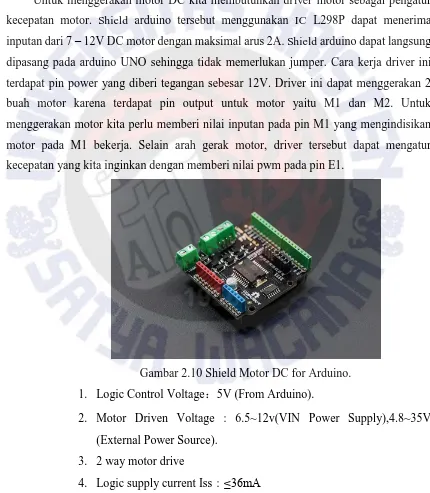
Untuk menggerakan motor DC kita membutuhkan driver motor sebagai pengatur kecepatan motor. Shield arduino tersebut menggunakan IC L298P dapat menerima inputan dari 7 – 12V DC motor dengan maksimal arus 2A. Shield arduino dapat langsung dipasang pada arduino UNO sehingga tidak memerlukan jumper. Cara kerja driver ini terdapat pin power yang diberi tegangan sebesar 12V. Driver ini dapat menggerakan 2 buah motor karena terdapat pin output untuk motor yaitu M1 dan M2. Untuk menggerakan motor kita perlu memberi nilai inputan pada pin M1 yang mengindisikan motor pada M1 bekerja. Selain arah gerak motor, driver tersebut dapat mengatur kecepatan yang kita inginkan dengan memberi nilai pwm pada pin E1.
Gambar 2.10 Shield Motor DC for Arduino.
1. Logic Control Voltage:5V (From Arduino).
2. Motor Driven Voltage : 6.5~12v(VIN Power Supply),4.8~35V
(External Power Source). 3. 2 way motor drive
4. Logic supply current Iss:≤36mA
6. Maximum power consumption:25W(T=75℃)
7. Up to 2A current each way
8. Pin 4,5,6,7 are used to drive two DC motor 9. Support PWM speed control
10.Support PLL advance speed control 11.Size: 55x55mm (2.2x2.2 in)
2.5. Sistem Kendali Proportional Integral Derivative(PID)
Kontroler Proporsional-Integral-Derivatif (PID controller) adalah mekanisme
kontrol umpan balik yang biasa digunakan dalam sistem industri. Kontroler PID
menghitung terus nilai error sebagai perbedaan antara proses yang terukur dengan hasil
yang diinginkan. Kontroller ini meminimalkan kesalahan setiap waktunya dengan
penyesuaian variablecontrol. Dengan mv(t) sebagai output maka bentuk dari PID adalah:
� = � +
��∫ + � (9)
Di mana:
mv(t) = output dari pengontrol PID atau Manipulated Variable
Kp = konstanta Proporsional
Ti = konstanta Integral
Td = konstanta Derivatif
e(t) = error (selisih antara set point dengan level aktual)
Persamaan Pengontrol PID diatas dapat juga dituliskan sebagai berikut :
� = � + �∫ + (10)
dengan :
� = �×�� = �× � (11)
Pengendali Proporsional (P)
dicerminkan oleh pita proporsional, sedangkan konstanta proporsional menunjukkan nilai faktor penguatan terhadap sinyal kesalahan, Kp [3].
Penggunaan mode kontrol proporsional harus memperhatikan hal – hal berikut : 1. Jika nilai Kpkecil, mode control proporsional hanya mampu melakukan
koreksi kesalahan yang kecil, sehingga menghasilkan respon sistem yang lambat.
2. Jika nilai Kpdinaikkan, respon sistem menunjukkan semakin cepat mencapai
keadaan stabilnya.
3. Namun jika nilai Kp diperbesar sehingga mencapai harga yang berlebihan akan
mengakibatkan sistem bekerja tidak stabil, atau respon sistem akan berosilasi. Kontrol P (Proportional) selalu sebanding dengan besarannya input.
Pengendali Integral (I)
Kontroller integral memiliki karakteristik seperti halnya sebuah integral. Keluaran kontroller sangat dipengaruhi oleh perubahan yang sebanding dengan nilai sinyal kesalahan. Keluaran kontroller ini merupakan jumlahan yang terus menerus
dari perubahan masukannya. Kalau sinyal kesalahan tidak mengalami perubahan, keluaran akan menjaga keadaan seperti sebelum terjadinya perubahan masukan[3].
Kontroler integral mempunyai beberapa karakteristik berikut ini:
1. Keluaran kontroler butuh selang waktu tertentu, sehingga kontroler integral cenderung memperlambat respon.
2. Ketika sinyal kesalahan berharga nol, keluaran kontroler akan bertahan pada nilai sebelumnya.
3. Jika sinyal kesalahan tidak berharga nol, keluaran akan menunjukkan kenaikan atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan dan nilai Ki.
4. Konstanta integralKi berharga besar, offset akan cepat hilang. Saatnilai Kibesar
Pegendali Diffrensial (D)
Keluaran kontroller differensial memiliki sifat seperti halnya suatu operasi derivatif. Perubahan yang mendadak pada masukan kontroller, akan mengakibatkan perubahan yang sangat besar dan cepat [3].
Karakteristik dari kontroller differensial adalah sebagai berikut:
1. Kontroler ini tidak dapat menghasilkan keluaran bila tidak ada perubahan atau
error sebagai sinyal kesalahan untuk masukannya.
2. Jika sinyal error berubah terhadap waktu, maka keluaran yang dihasilkan
kontroller tergantung pada nilai Td dan laju perubahan sinyal kesalahan.
3. Kontroller differensial mempunyai karakter untuk mendahului, sehingga
kontroller ini dapat menghasilkan koreksi yang signifikan sebelum pembangkit error menjadi sangat besar. Jadi controller differensial dapat
mengantisipasi pembangkit error, memberikan aksi yang bersifat korektif, dan cenderung meningkatkan stabilitas sistem.
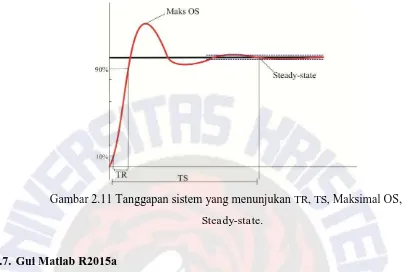
2.6. Tanggapan Sistem Settling Time, Rise Time, Maksimal OS, Steady-state error
Dalam trainer tersebut dilengkapi tampilan nilai dari Settling Time, Rise Time, Maksimal OS, dan Steady-state error. Settling time merupakan nilai ketika motor mulai di “RUN” hingga kondisi steady state. Dalam trainer ini, dinyatakan dalam kondisi steady state ketika mencapai 5% dari nilai setpoint. Untuk nilai rise time, pengukuran yang digunakan mulai dari 10% hingga 90% dari nilai setpoint.
1. Settling time(TS) merupakan nilai yang didapat ketika sistem mencapai kondisi steady-state. Sistem akan dikatakan dalam kondisi steady-state ketika masuk 2% atau 5% dari nilai setpoint. Pada trainer ini akan digunakan nilai 5% sebagai kondisi dimana telah masuk steady-state.
2. Rise time(TR) adalah ukuran waktu yang menyatakan keberadaan suatu respon, Diukur ketika mencapai 5% hingga 95%, ataupun pada nilai 10% hingga 90% dari nilai setpoint. Pada trainer yang dibuat, digunakan dari 10% hingga 90%.
3. Maksimal OS adalah nilai tertinggi yang dicapai oleh sistem.
Gambar 2.11 Tanggapan sistem yang menunjukan TR, TS, Maksimal OS, Steady-state.
2.7. Gui Matlab R2015a
Matlab merupakan software komputasi numerik dan visualisasi data. Berbagai

![Gambar 2.6 Eddy Current Brake Linear [7]](https://thumb-ap.123doks.com/thumbv2/123dok/3724952.1480902/5.595.103.506.221.454/gambar-eddy-current-brake-linear.webp)