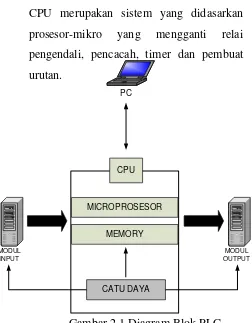
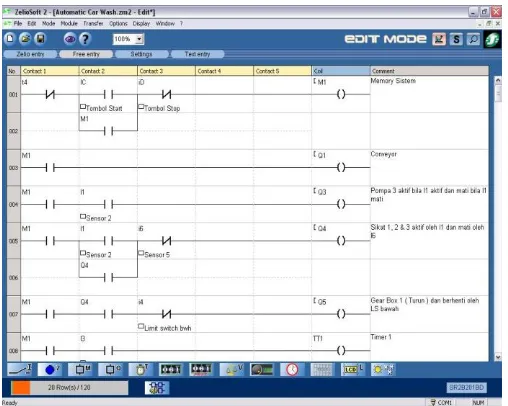
PLC dapat menyediakan sistem Kontrol yang diinginkan dan juga tidak membutuhkan tempat yang terlalu banyak dibandingkan dengan pemakaian relai, timer dan counter karena PLC bisa menggantikan fungsi dari komponen-komponen tersebut. PLC juga dapat beroperas
Teks penuh
Gambar

Dokumen terkait
Struktur organisasi adalah suatu susunan dan hubungan antara tiap bagian serta posisi yang ada pada suatu organisasi atau perusahaan dalam menjalankan kegiatan operasional
Dalam nilai awal tertentu X 1 dan dalam suatu masalah optimisasi, solusi numerik yang dihasilkan oleh metode Stepest Descent terinduksi Newton akan menghasilkan
active cycle of breathing meningkatkan elastisitas dan compliance paru pada penderita tuberkulosis sehingga volume udara meningkat dan berdampak pada peningkatan
Penelitian ini dilakukan selama dua bulan sesudah seminar proposal yang berlangsung di kantor Kelurahan Pattingalloang Baru Kecamatan Ujung Tanah Kota Makassar
Matlamat utama kewujudan firma perniagaan sama ada berbentuk perniagaan tunggal, perkongsian atau syarikat korporat adalah bagi memaksimumkan kekayaan pemegang saham atau
TARGET UNIT PENANGG UNG- JAWAB PRAKIRAAN MAJU 2020 2021 2022 2023 2024 Memperkuat stabilitas keamanan nasional Koordinasi, Sinkronisasi, dan Pengendalian Bidang
bertujuan untuk mengembalikan komponen - komponen dan material untuk diproses ulang dan digunakan kembali, serta mengurus bahan berbahaya dan materi lain yang
Metode yang digunakan dalam penciptaan karya adalah: (a) Eksplorasi tema, yaitu metode untuk menemukan ide dalam pembentukan objek mata maupun objek pendukung lain dengan
