BAB III
PERANCANGAN ALAT
Pada bab ini akan dijelaskan tentang perancangan dari perangkat keras dan
perangkat lunak pada alat ini. Dimulai dengan uraian tentang perangkat keras dilanjutkan dengan uraian tentang perangkat lunak.
3.1. Gambaran Sistem
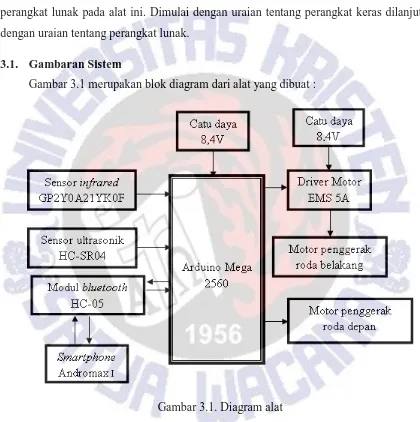
Gambar 3.1 merupakan blok diagram dari alat yang dibuat :
Gambar 3.1. Diagram alat
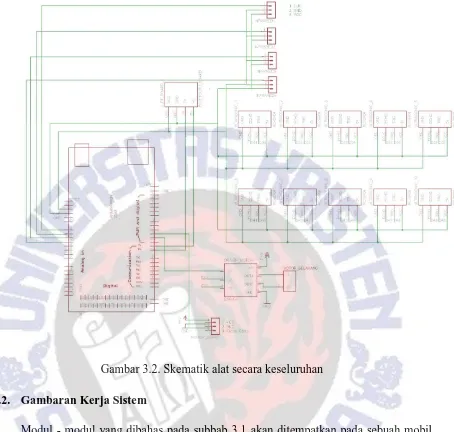
Gambar 3.2. Skematik alat secara keseluruhan
3.2. Gambaran Kerja Sistem
Modul - modul yang dibahas pada subbab 3.1 akan ditempatkan pada sebuah mobil miniatur Remote Control (RC). Peletakan modul sensor HC-SR04 terdapat pada sisi depan,
belakang, kanan dan kiri mobil. Untuk sensor GP2Y0A21YK0F diletakkan pada sisi miring pada mobil. Pemasangan modul sensor di segala sisi mobil diharapkan dapat
mengukur jarak dengan lebih teliti.
Untuk keluar dari ruas parkir, alat akan menunggu perintah yang dikirimkan melalui
smartphone. Setelah menerima perintah dari smartphone, alat akan berjalan secara perlahan untuk keluar dari ruas parkir. Setelah alat telah keluar dari ruas parkir, maka
smartphone akan menerima informasi bahwa mobil telah keluar dari ruas parkir.
3.3. Perancangan Perangkat Keras
Pada perancangan alat ini, perangkat keras yang digunakan adalah modul mikrokontroler, modul sensor ultrasonik, modul sensor infrared, modul bluetooth, modul motor driver, modul servo motor dan modul smartphone.
3.3.1.Modul Sensor Ultrasonik
Sensor ultrasonik memiliki fungsi kerja untuk mengukur jarak, dimana sensor ini akan menembakan sinyal ultrasonik yang nantinya sinyal tersebut akan dipantulkan
kembali ke sensor tersebut jika mendeteksi adanya benda. Pada skripsi ini digunakan sensor dengan tipe HC-SR04 yang merupakan clone dari SRF04, yang memiliki kinerja
yang hampir sama dengan SRF04.
Gambar 3.3. Bentuk fisik dan konfigurasi pin sensor ultrasonik HC-SR04
3.3.2.Modul Sensor Infrared
Sensor infrared memiliki fungsi kerja untuk mengukur jarak, dimana sensor ini akan menembakan sinar infrared yang nantinya akan dipantulkan jika terdapat benda yang ada dijalur sinar tersebut. Pada skripsi ini digunakan sensor dengan tipe GP2Y0A21YK0F. Konfigurasi dari sensor GP2Y0A21YK0F sebagai berikut :
Kabel hitam : Ground
Kabel kuning : Output sensor
Gambar 3.4. Sensor infrared GP2Y0A21YK0F
3.3.3.Modul Bluetooth
Bluetooth merupakan modul yang berfungsi sebagai sarana komunikasi antara
smartphone dengan alat yang dibuat. Pada skripsi ini, modul bluetooth yang digunakan memakai tipe HC05.
Gambar 3.5. Modul bluetooth HC - 05
3.3.4.Modul Mikrokontroler
Gambar 3.6. Arduino Mega 2560
Konfigurasi dari tiap pin/port pada mikrokontroler pada skripsi ini dapat dilihat pada tabel 3.1.
Tabel 3.1. Konfigurasi penggunaan pin/port Arduino Mega 2560
Pin / Port Keterangan
D30.D31 ; .... ; D48,D49 Trigger 1,Echo 1; ... ; Trigger 10,Echo 10
A0 - A3 Output sensor infrared 1 - 4
D28 Kendali positif motor
D29 Kendali negatif motor
PWM3 Enable motor
PWM4 Kendali motor servo
C14 RX pada bluetooth
C15 TX pada bluetooth
3.3.5.Modul Motor Driver
Gambar 3.7. Embedded Module Series (EMS) 5 A H-Bridge
Konfigurasi pin pada Embedded Module Series 5A pada skripsi ini dapat dilihat pada tabel 3.2.
Tabel 3.2. Konfigurasi pin Embedded Module Series 5A
Pin Keterangan
MIN 1 Kendali positif motor (D28)
MIN 2 Kendali negatif motor (D29)
MEN Enable motor (PWM3)
MSLP Catu daya 5 volt
VCC Catu daya 5 volt
PGND Ground 5 volt
V MOT Catu daya motor 8,4 volt
MGND Ground 8,4 volt
MOUT 1 Positif motor ( kabel merah )
MOUT 2 Negatif motor ( kabel hitam )
3.3.6.Modul servo motor
Servo motor pada pembuatan skripsi ini berfungsi untuk pengendali roda depan untuk belok kanan dan belok kiri. Tipe yang digunakan adalah Tower Pro Micro Servo 9g.
Konfigurasi dari Tower Pro Micro Servo 9g adalah sebagai berikut :
Kabel merah : +5V
Kabel orange : Kendali motor servo ( PWM 4 )
Gambar 3.8. Tower Pro Micro Servo 9g
3.3.7.Modul Smartphone
Smartphone pada tugas skripsi ini berfungsi untuk mengaktifkan sistem pada alat serta menerima pemberitahuan jika alat telah berada di dalam atau di luar ruas parkir. Tipe
smartphone yang digunakan adalah Smartfren Andromax I.
3.4. Ilustrasi Kerja Sistem
Subbab ini menjelaskan tentang langkah - langkah dari sistem pada alat, yang terdiri dari gambar ilustrasi masuk parkir paralel, masuk parkir tegak lurus, keluar parkir paralel dan keluar parkir tegak lurus yang disertai dengan penjelasan singkat dari gambar ilustrasi tersebut. Gambar 3.8 merupakan gambar ilustrasi dari alat.
Gambar 3.10. Gambar ilustrasi dari alat
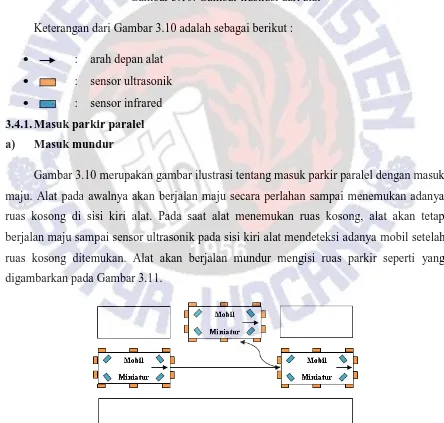
Keterangan dari Gambar 3.10 adalah sebagai berikut :
: arah depan alat
: sensor ultrasonik
: sensor infrared
3.4.1.Masuk parkir paralel
a) Masuk mundur
Gambar 3.10 merupakan gambar ilustrasi tentang masuk parkir paralel dengan masuk maju. Alat pada awalnya akan berjalan maju secara perlahan sampai menemukan adanya ruas kosong di sisi kiri alat. Pada saat alat menemukan ruas kosong, alat akan tetap berjalan maju sampai sensor ultrasonik pada sisi kiri alat mendeteksi adanya mobil setelah
ruas kosong ditemukan. Alat akan berjalan mundur mengisi ruas parkir seperti yang digambarkan pada Gambar 3.11.
b) Masuk maju
Gambar 3.11 merupakan gambar ilustrasi dari masuk parkir paralel dengan masuk maju. Alat pada awalnya akan berjalan maju secara perlahan sampai sensor infrared pada sisi kiri alat. Pada saat sensor infrared menemukan ruas kosong pada sisi kiri, alat akan berbelok ke kiri dan mengisi ruas parkir seperti pada Gambar 3.12.
Gambar 3.12. Ilustrasi parkir paralel masuk maju
3.4.2.Masuk parkir tegak lurus
a) Masuk mundur
Gambar 3.12 merupakan gambar ilustrasi dari masuk parkir tegak lurus dengan masuk mundur. Alat pada awalnya akan maju dengan perlahan sampai sensor ultrasonik pada sisi kanan dan sisi kiri mendeteksi adanya ruas kosong pada sisi kanan dan kiri. Saat alat menemukan adanya ruas kosong pada sisi kanan atau sisi kiri alat, alat akan maju sampai mendeteksi ada mobil setelah ruas kosong tersebut. Alat akan mundur secara perlahan untuk mengisi ruas kosong seperti Gambar 3.13.
b) Masuk maju
Gambar 3.13 merupakan gambar ilustrasi dari masuk ruas parkir tegak lurus dengan masuk maju. Alat akan berjalan maju secara perlahan sampai sensor infrared mendeteksi adanya ruas kosong pada sini kanan atau sisi kiri alat. Alat akan berbelok ke arah ruas yang telah ditemukan seperti pada Gambar 3.14.
Gambar 3.14. Ilustrasi parkir tegak lurus masuk maju
3.4.3.Keluar parkir paralel
Gambar 3.15 merupakan gambar ilustrasi dari keluar parkir paralel. Alat akan berjalan mundur sampai jarak minimal seperti yang di ilustrasikan pada Gambar 1. Alat kemudian akan berjalan maju perlahan untuk keluar dari ruas parkir seperti pada Gambar 2.
Gambar 3.15. Ilustrasi keluar parkir paralel
1
3.4.4.Keluar parkir tegak lurus
a) Keluar maju
Gambar 3.15 merupakan ilustrasi dari keluar parkir tegak lurus dengan keluar maju. Sensor ultrasonik yang berada sisi depan akan mengecek apakah ada mobil di sisi depan. Jika tidak ada mobil di sisi depan maka alat akan keluar dari ruas kosong dengan keluar maju seperti yang digambarkan pada Gambar 3.16.
Gambar 3.16. Ilustrasi keluar parkir tegak lurus dengan keluar maju
b) Keluar mundur
Gambar 3.16 merupakan gambar Ilustrasi dari keluar parkir tegak lurus dengan keluar mundur. Sensor ultrasonik yang berada di sisi belakang akan mengecek apakah ada mobil di sisi belakang alat, jika tidak ada mobil maka alat akan berjalan mundur untuk keluar dari tempat parkir seperti yang digambarkan pada Gambar 3.17.
3.5. Perancangan Perangkat Lunak
Perancangan perangkat lunak pada skripsi ini terdiri dari program pengolahan data dari sensor HC-SR04, pengolahan data dari sensor GP2Y0A21YK0F, program pengatur gerak motor servo dan program tampilan menu interface pada smartphone. Penjelasan dari perancangan perangakat lunak dari alat ini akan dijelaskan melalui diagram alir secara keseluruhan dari alat. Diagram alir untuk perancangan skripsi ini dibagi menjadi beberapa kondisi, kondisi - kondisi tersebut adalah sebagai berikut :
1) Kondisi mencari ruas parkir (Gambar 3.18).
2) Kondisi masuk ruas parkir tegak lurus dengan masuk maju (Gambar 3.19).
3) Kondisi masuk ruas parkir tegak lurus dengan masuk mundur (Gambar 3.20).
4) Kondisi masuk ruas parkir paralel dengan masuk maju (Gambar 3.21).
5) Kondisi masuk ruas parkir paralel dengan masuk mundur (Gambar 3.22).
6) Kondisi keluar ruas parkir tegak lurus (Gambar 3.23).
Start
Gambar 3.18. Diagram alir dari mencari ruas parkir
Penjelasan dari Gambar 3.18 adalah sebagai berikut :
Sistem akan diatur terlebih dahulu akan masuk ke ruas parkir dengan cara masuk maju atau masuk mundur melalui smartphone.
Setelah menentukan cara masuk dari alat, maka tombol start diaktifkan untuk mengaktifkan sistem pada alat.
Ruas kosong di
mobil sudah ada di tempat parkir
Sisi kanan dan kiri ada mobil?
Tidak
Sisi kanan dan kiri ada mobil?
Gambar 3.19. Diagram alir masuk ruas parkir tegak lurus dengan masuk maju
Penjelasan dari Gambar 3.19 sebagai berikut :
Alat akan maju secara perlahan sampai alat menemukan salah satu ruas kosong yang
berada di sisi kiri atau sisi kanan.
Jika berada di sisi kiri, maka roda depan akan dibelokan ke kiri dan alat akan maju secara perlahan.
memperbaiki posisi dengan cara berjalan mundur kemudian kembali maju secara perlahan memasuki ruas parkir.
Jika jarak pada sisi kanan dan sisi kiri sudah aman, maka sensor depan mengecek apakah sudah berada di jarak minimal yang telah ditetapkan, jika sudah maka alat akan berhenti dan akan mengirimkan pemberitahuan ke smartphone bahwa telah masuk ruas parkir dengan aman.
Begitu juga jika alat mendeteksi ada ruas kosong di sisi kanan.
Ruas kosong di
mobil sudah ada di tempat parkir
Sisi kanan dan kiri ada mobil?
Tidak
Sisi kanan dan kiri ada mobil?
Penjelasan dari Gambar 3.20 sebagai berikut:
Alat akan mundur secara perlahan sampai alat menemukan ruas kosong yang telah ditemukan saat berada dalam kondisi mencari ruas parkir, baik itu di sisi kanan maupun di sisi kiri, kemudian roda depan akan belok sesuai dengan ruas kosong yang telah ditemukan.
Alat akan mundur kembali secara perlahan sampai sensor pada sisi kanan dan kiri mendeteksi adanya mobil.
Jika pada sisi kanan dan kiri belom terpenuhi, sensor belakang akan memeriksa apakah ada mobil dibelakang alat, jika ada maka alat akan memperbaiki posisi dan kembali berjalan mundur secara perlahan.
Setelah kondisi sisi kanan dan kiri mendeteksi ada mobil di sisi kanan dan kiri, maka roda depan akan kembali diluruskan, kemudian alat akan berjalan mundur secara perlahan hingga sensor belakang dapat mendeteksi adanya mobil sebagai penanda bahwa alat harus berhenti.
Alat akan mengirim pemberitahuan ke smartphone bahwa alat tersebut telah mengisi
Start
Cek sisi depan ada mobil?
Cek sisi kiri, depan dan belakang ada mobil?
Roda depan diluruskan
Ya
Cek salah satu sisi mobil terdapat mobil
atau tidak? Tidak
Mobil memperbaiki posisi agar mobil berada di jarak yang aman dengan mobil
sekitarnya Ya
Tidak
Roda depan belok kanan
Mobil berhenti, smartphone
mendapat pemberitahuan bahwa mobil telah berada di
dalam tempat parkir
End
Penjelasan dari Gambar 3.21 sebagai berikut:
Alat berjalan maju secara perlahan sampai terdeteksi ada ruas kosong di sisi kiri.
Jika telah terdeteksi ada ruas kosong di sisi kiri, maka roda depan akan dibelokan ke kiri, kemudian alat akan masuk secara perlahan dan mengisi ruas kosong tersebut.
Sensor pada sisi depan mengecek apakah terdapat mobil di sisi depan alat, jika terdeteksi adanya mobil pada sisi depan, maka roda depan pada alat akan belok ke kanan, kemudian mobil akan maju secara perlahan.
Cek sisi belakang, kiri dan depan apakah terdeteksi mobil atau tidak, jika tidak maka sisi belakang, kiri dan depan akan dicek apakah ada mobil yang membahayakan alat
pada salah satu sisi tersebut, jika terdeteksi maka alat akan memperbaiki posisi.
Start
Cek sisi belakang ada mobil?
Cek sisi kiri, depan dan belakang ada mobil? bahwa mobil sudah berada di
dalam tempat parkir
End
Cek salah satu sisi mobil terdapat mobil
atau tidak? Tidak
Mobil memperbaiki posisi agar mobil berada di jarak yang aman dengan mobil
sekitarnya Ya
Tidak
Roda depan belok kanan
Penjelasan dari Gambar 3.22 sebagai berikut:
Alat akan berjalan mundur secara perlahan sampai menemukan ruas kosong yang berada sisi kiri yang ditemukan pada saat alat berada pada kondisi mencari ruas parkir.
Roda depan akan belok kiri, kemudian alat akan kembali berjalan mundur secara perlahan.
Sensor yang berada di sisi belakang akan mengecek apakah ada mobil yang berada di
sisi belakang, jika ada maka roda depan akan dibelokan ke kanan, kemudian alat akan kembali berjalan mundur secara perlahan.
Sensor pada sisi belakang, kiri dan depan mengecek apakah terdapat mobil di ketiga
sisi tersebut, jika belum terpenuhi, maka alat akan berjalan mundur secara perlahan
dengan roda depan masih dengan belok ke kanan.
Jika kondisi ketiga sisi tersebut telah terpenuhi maka roda akan diluruskan dan alat akan berhenti.
Kemudian alat akan memberi pemberitahuan ke smartphone bahwa alat telah
Start
Sisi kiri depan dan kanan depan ada mobil?
Sisi kiri depan dan kanan depan ada mobil? Ya Ya
Sisi kanan dan kiri mobil ada mobil
Sisi kanan dan kiri mobil ada mobil
Penjelasan dari Gambar 3.23 sebagai berikut:
Alat akan menerima perintah untuk keluar dari ruas parkir yang dikirim melalui
smartphone.
Awalnya sensor depan dan sensor belakang mengukur apakah ada mobil di sisi depan alat atau di sisi belakang alat. Jika berada di sisi depan maka alat masuk ruas parkir dengan masuk maju, jika berada di sisi belakang maka alat masuk ruas parkir dengan masuk mundur.
Untuk masuk maju, cara alat keluar adalah dengan berjalan mundur secara perlahan.
Saat alat sudah keluar setengah bagian, maka roda depan akan belok ke kiri kemudian tetap mundur secara perlahan untuk keluar dari ruas parkir.
Jika sensor kanan dan kiri telah mendeteksi adanya mobil pada kedua sisi ini maka roda depan akan diluruskan dan alat akan berhenti
Untuk masuk mundur, cara alat keluar adalah dengan berjalan maju secara perlahan.
Saat alat sudah keluar setengah bagian, maka roda depan alat akan belok ke kiri kemudian tetap berjalan maju secara perlahan untuk keluar dari ruas parkir.
Start
Sisi kiri dan kanan ada mobil?
Tidak
Ya Tidak
Penjelasan dari Gambar 3.24 sebagai berikut :
Alat akan menerima perintah untuk keluar dari ruas parkir yang dikirim melalui smartphone.
Alat akan mundur secara perlahan sampai sensor belakang mendapatkan jarak
minimum antara mobil dengan alat, kemudian roda depan akan belok ke kanan dan alat akan maju secara perlahan.
Sensor di sisi depan akan mengecek apakah selama maju ke kanan ada mobil di sisi
depan atau tidak, jika sudah tidak menemukan adanya mobil di sisi depan alat roda depan akan belok ke kiri dan alat tetap maju secara perlahan.
Sensor belakang akan mengecek apakah masih ada mobil di sisi belakang alat, jika
sudah tidak ada roda depan akan diluruskan dan alat tetap maju secara perlahan.
START mobil sudah masuk tempat
parkir
Smartphone menerima pemberitahuan bahwa mobil sudah keluar tempat
parkir
Ya Ya
Gambar 3.25.Diagram alir menu interface pada Smartphone
Penjelasan dari diagram alir pada Gambar 3.25 adalah sebagai berikut :
Pada masuk parkir akan diperiksa apakah alat berada di luar tempat parkir atau tidak, jika posisi alat berada di luar tempat parkir maka alat akan menjalankan sistem masuk parkir, jika berada di dalam tempat parkir akan ada pemberitahuan bahwa alat sudah berada di dalam tempat parkir.
Pada masuk parkir, terdapat 2 opsi pilihan yang akan digunakan untuk mengaktifkan
kondisi masuk parkir yaitu masuk maju dan masuk mundur.
Pada masuk maju, alat akan menjalankan sistem mengisi tempat parkir dengan masuk maju sedangkan pada masuk mundur, alat akan menjalankan sistem mengisi tempat parkir dengan masuk mundur.
Setelah alat berada di dalam tempat parkir, smartphone akan menerima
pemberitahuan bahwa alat telah masuk ke tempat parkir.
Pada opsi keluar parkir akan diperiksa apakah alat berada di dalam tempat parkir atau tidak. Jika alat berada di dalam tempat parkir alat akan menjalankan sistem keluar parkir, sedangkan jika alat berada di luar tempat parkir smartphone akan menerima pemberitahuan bahwa alat sudah berada di luar tempat parkir.