(Disusun untuk memenuhi prasyarat mata kuliah Kerangka Vertikal)
Disusun oleh :
KELOMPOK V A
Muhammad Amar Makruf 21110113120036
Yunita Sri Ulina 21110115120014
Febrina Mutiara R Pane 21110115120021
Johan Wisma Anggoro 21110115120022
Faisal Aldin 21110115120044
Siti Rahayuningsih 21110115120045
DEPARTEMEN TEKNIK GEODESI
FAKULTAS TEKNIK UNIVERSITAS DIPONEGORO
Jl. Prof. Sudarto SH, Tembalang Semarang Telp. (024)76480785, 76480788
e-mail : [email protected]
Laporan praktikum Kerangka Vertikal ini telah disetujui dan disahkan oleh Dosen Pembimbing Praktikum Kerangka Vertikal jurusan Teknik Geodesi Fakultas Teknik Universitas Diponegoro.
Disusun oleh:
KELOMPOK V-A
1. Muhammad Amar Makruf 21110113120036
2. Yunita Sri Ulina 21110115120014
3. Febrina Mutiara Rosita Pane 21110115120021
4. Johan Wisma Anggoro 21110115120022
5. Faisal Aldin 21110115120044
6. Siti Rahayuningsih 21110115120045
Semarang, 26 Mei 2017
Mengetahui,
Dosen Pengampu I Mata Kuliah Kerangka Vertikal
Arwan Putra Wijaya, ST. MT NIP 198501252012121005
Asisten Dosen Mata Kuliah Kerangka Vertikal
KATA PENGANTAR
Puji syukur kami panjatkan pada kehadirat Tuhan Yang Maha Esa yang telah melimpahkan rahmat, taufik, hidayah, dan inayah-Nya sehingga penulisan laporan ini dapat terselesaikan dengan baik.
Laporan ini disusun sebagai salah satu hasil praktikum dan untuk memenuhi tugas akhir mata kuliah Kerangka Vertikal, Program Studi Teknik Geodesi, Fakultas Teknik, Universitas Diponegoro.
Dalam kesempatan yang baik ini, kami juga ingin mengucapkan terima kasih kepada :
1. Ir.Sawitri Subiyanto, M.Si selaku ketua jurusan Teknik Geodesi Fakultas Teknik Universitas Diponegoro.
2. Arwan Putra Wijaya, ST. MT selaku dosen mata kuliah Kerangka Vertikal 3. Ir.Sutomo Kahar, M.Si selaku dosen mata kuliah Kerangka Vertikal.
4. Iqbal Yukha Nur Afani selaku asisten dosen mata kuliah Kerangka Vertikal yang telah membimbing kami dalam menyelesaikan serangkaian praktikum dan pembuatan laporan.
4. Seluruh pihak yang telah mendukung kami dalam menyelesaikan Laporan Kerangka Vertikal.
Kami sadar bahwa laporan yang kami susun masih sangat jauh dari sempurna, oleh karena itu masukan dan kritikan yang bersifat membangun sangat kami harapkan sebagai acuan agar menjadi lebih baik lagi. Terima kasih.
Semarang, Mei 2017
BAB I
PENDAHULUAN
I.1 Latar Belakang
Perkembangan pembangunan pada era globalisasi pada saat ini sangatlah pesat. Dibutuhkan suatu metode yang praktis dengan bantuan alat untuk mempermudah para ahli untuk menyelesaikan segala masalah dalam pengembangan pemanfaatan alam, dalam laporan ini menjabarkan dan melaporkan hasil pengamatan mengenai pengukuran tanah tentang kerangka dasar vertikal, oleh karena perkembangan teknologi sangat pesat seperti pengukuran kerangka dasar vertikal untuk mendapatkan tinggi dari suatu titik yang nantinya dapat dipergunakan untuk mengetahui kontur dari tanah tempat bangunan akan didirikan dan segala perangkat untuk mempermudah dan mempercepat pengukuran KDV serta pengolahan datanya telah tersedia di dalam laporan ini.
Kerangka dasar vertikal (tinggi) dan kerangka dasar horizontal (planimetris) diperlukan dalam konsep dasar pemetaan kerangka dasar pemetaan. Kerangka dasar vertikal merupakan kumpulan titik-titik yang telah diketahui atau ditentukan posisi vertikalnya berupa ketinggiannya terhadap bidang rujukan ketinggian tertentu. Bidang ketinggian rujukan ini bisa berupa ketinggian muka air laut rata-rata (mean sea level - MSL) atau ditentukan lokal. Umumnya titik kerangka dasar vertikal dibuat menyatu pada satu pilar dengan titik kerangka dasar horizontal (Bony, 2008). Definisi tinggi yaitu perbedaan vertikal antara kedua titik tertentu sepanjang garis vertikal (Takashi dan Sosrodarsono, 2005). Menentukan tinggi biasanya dikenal dengan istilah geoid yang artinya bidang equipotensial gaya berat (bidang nivo) yang berimpit dengan muka air laut rata-rata yang tidak terganggu.
Terkait dengan penentuan posisi di bumi, kita mengenal istilah koordinat. Besaran koordinat sendiri terbagi 2, yaitu : besaran Kartesian (X,Y,Z) dan besaran Geodetik (Φ,λ,h). Simbol Z untuk besaran Kartesian dan simbol h untuk besaran Geodetik mengandung informasi tinggi suatu titik. Mengingat titik tinggi tersebut sangat penting dalam penentuan posisi di bumi, ketinggian atau kedalaman ditetapkan terhadap bidang acuan tertentu diberi nilai tinggi nol. Maka pembahasan mengenai hal ini dipelajari lebih mendalam dalam mata kuliah Kerangka Vertikal.
I.2 Maksud dan Tujuan
Diadakannya praktikum Kerangka Vertikal ini dengan maksud agar praktikan dapat memahami dan dapat memperoleh gambaran yang jelas tentang bagaimana penerapan teori di lapangan menggunakan metode sipat datar .
Tujuan dari pelaksanaan praktikum Kerangka Vertikal ini adalah :
1. Penerapan dari matakuliah kerangka vertical.
2. Penentuan elevasi titik, dari titik awal dengan menggunakan beda tinggi antar titik.
3. Penentuan beda tinggi antar titik dengan metode hitung perataan Least Square.
I.3 Rumusan Masalah
Rumusan masalah dalam kegiatan praktikum Kerangka Vertikal ini antara lain:
1. Bagaimana menentukan elevasi menggunakan beda tinggi antar titik? 2. Bagaimana perbedaan metode hitung Least Square dengan metode hitung
lainnya?
3. Bagaimana perbedaan metode pengukuran penampang memanjang dengan metode lainnya?
I.4 Ruang Lingkup Praktikum
I.5 Lokasi dan Waktu Praktikum
Lokasi yang menjadi tempat praktikum pengukuran sipat datar ini adalah Fakultas Perikanan dan Ilmu Kelautan Undip, Tembalang, Semarang, pada tanggal 25 April 2017 sampai
I.6 Sistematika Penulisan Laporan BAB I PENDAHULUAN
BAB II DASAR TEORI
Membahas teori tentang konsep dasar datum vertikal, konsep dasar sipat datar, pengukuran beda tinggi antara dua buah titik, pengukuran sipat datar berantai, pengukuran sipat datar teliti, pengukuran tinggi sipat datar, sumber kesalahan dan cara mengatasinya, serta tingkat ketelitian pengukuran sipatdatar.
BAB III PELAKSANAAN PRAKTIKUM
Dalam bab ini akan dibahas tentang persiapan praktikum, pemasangan patok, pengukuran waterpass, pelaksanaan, metode perhitungan, dan metode penggambaran.
BAB IV HASIL DAN PEMBAHASAN
Dalam bab ini akan menerangkan tentang hasil perhitungan beda tinggi serta pembahasannya.
BAB V PENUTUP
BAB II
Waterpass (penyipat datar) adalah suatu alat ukur tanah yang dipergunakan untuk mengukur beda tinggi antara titik-titik saling berdekatan. Prinsip cara kerja dari alat ukur waterpass adalah membuat garis sumbu teropong horizontal (Krisnandi, 2015). Bagian yang membuat kedudukan menjadi horizontal ini adalah nivo, yang berbentuk sebagai tabung berisi cariran dengan gelembung didalamnya. Menurut Ir. Haniah dalam menggunakan waterpas harus dipenuhi persyaratan bahwa:
1. Garis sumbu teropong harus sejajar dengan garis arah nivo 2. Garis nivo harus tegak lurus dengan sumbu I
3. Benang silang horizontal harus tegak lurus sumbu I
Alat ukur waterpass dapat digolongka kedalam beberapa jenis, yakni:
a. Type semua tetap (Dumpy Level), dimana teropong dengan nivo menjadi satu, penyetelan kedudukan teropong dilakukan dengan tiga sekrup pengatur.
b. Type nivo reveresi (Wye-Level), type dimana teropong dapat diputar pada sumbu memanjangnya, sehingga tabung nivo yang mula-mula berada diatas teropong dapat diputar menjadi berada dibawah teropong.
c. Type semua tetap dengan sekrup pengungkit(Dumpy tilting level). Pada jenis ini sumbu teropong dapat distel dengan menggunakan sekrup pengungkit (tilting screw).
kedudukan teropong, dengan demikian sumbu bidiknya akan selalu mendatar.
e. Hand level, dimana alat ini hanya terdiri dari teropong yang dilengkapi dengan nivo. Sendangkan cara menggunakannya cukup dipegang dengan tangan. Ketelitian dari alat ini sangat kurang dibanding dengan keempat jenis diatas.
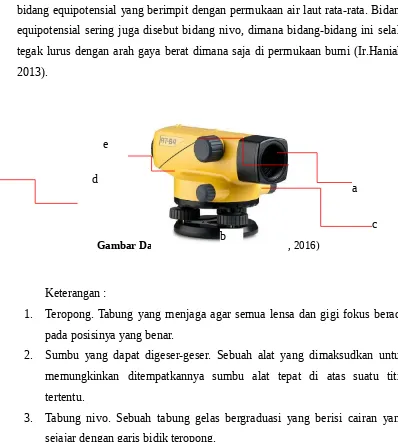
Sipat datar atau levelling atau waterpassing bertujuan menentukan beda tinggi antara titik-titik diatas permukan bumi. Tinggi suatu objek di permukaaan bumi ditentukan dari suatu bidang referensi atau datum, yaitu bidang yang dianggap ketinggiannya nol. Bidang ini dalam Geodesi disebut geoid, yaitu bidang equipotensial yang berimpit dengan permukaan air laut rata-rata. Bidang equipotensial sering juga disebut bidang nivo, dimana bidang-bidang ini selalu tegak lurus dengan arah gaya berat dimana saja di permukaan bumi (Ir.Haniah, 2013).
1.
Gambar Dasar Teori-1 Waterpass (Alatuji, 2016)
Keterangan :
1. Teropong. Tabung yang menjaga agar semua lensa dan gigi fokus berada pada posisinya yang benar.
2. Sumbu yang dapat digeser-geser. Sebuah alat yang dimaksudkan untuk memungkinkan ditempatkannya sumbu alat tepat di atas suatu titik tertentu.
3. Tabung nivo. Sebuah tabung gelas bergraduasi yang berisi cairan yang sejajar dengan garis bidik teropong.
a
c b
4. Tiga sekrup pendatar. Sekrup-sekrup pengatur yang dipakai untuk mendatarkan level.
5. Nivo kotak. Nivo yang berbentuk kotak yang berisi cairan yang tegak lurus dengan garis bidik teropong.
b
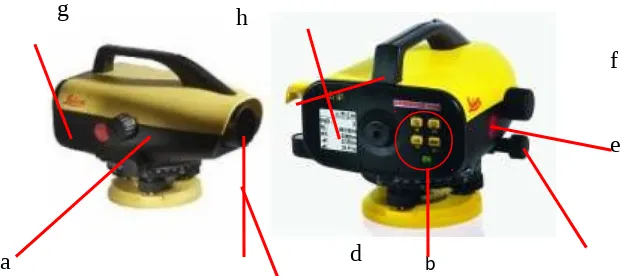
Gambar Dasar Teori-2 Waterpass digital (Fungsi Alat, 2016)
Keterangan: a. Teropong
b. Tombol on/off dan tombol program c. Tiga sekrup pendatar
d. Penggerak halus horizontal e. Tombol bidik
f. Pengatur fokus lensa teropong saat membidik bar code g. Display LCD
h. Nivo
Kemampuan Waterpass
Waterpass dilengkapi dengan nivo agar pengamat dapat mengetahui kedataran alat. Tiga skrup pendatar, alat fokus diafragma, alat fokus bidikan , dan skala lingkar mendatar yang dapat digunakan untuk memudahkan pengamat dalam melakukan pengukuran. Fungsi dari bagian-bagian yang terdapat pada waterpass adalah sebagai berikut:
a d
e f
g h
1. Sekrup pengatur ketajaman diafragma, berfungsi untuk mengatur ketajaman benang diafragma (benang silang).
2. Lensa pembacaan sudut horisontal, berfungsi untuk memperbesar dan memperjelas bacaan sudut horisontal.
3. Sekrup A,B,C, berfungsi untuk mengatur kedataran pesawat (sumbu I vertikal).
4. Sekrup pengatur fokus teropong, berfungsi untuk memperjelas obyek yang dibidik.
5. Teropong, berfungsi untuk menempatkan lensa serta peralatan yang berfungsi untuk meneropong atau membidik obyek pengukuran.
6. Pelindung lensa obyektif, berfungsi untuk melindungi lensa obyektif dari sinar matahari secara langsung.
7. Lensa obyektif, berfungsi untuk menerima obyek yang dibidik.
8. Klem aldehide horisontal, berfungsi untuk mengunci perputaran pesawat arah horisontal.
9. Sekrup penggerak halus aldehide horisontal, berfungsi untuk menggerakkan pesawat arah horisontal secara halus setalah klem aldehide horisontal dikunci agar kedudukan benang pada pesawat tepat pada obyek yang dibidik.
10. Sekrup pengatur sudut, berfungsi untuk mengatur landasan sudut datar. 11. Visier, berfungsi sebagai alat bantu bidikan kasar untuk mempercepat
pembidikan obyek. Kegunaan waterpass:
a. Memperoleh pandangan mendatar atau lurus b. Menentukan beda tinggi
c. Bila dilengkapi benang stadia dapat mengukur jarak
d. Bila dilengkapi lingkatan horisontal berskala dapat mengukur sudut horisontal
Kelebihan Waterpass
1. Memiliki ketelitian yang cukup tinggi
2. Mampu melakukan pengukuran beda tinggi secara lebih cepat 3. Centering lebih cepat karena hanya centering untuk nivo kotak
Syarat-syarat Pemakaian Alat Sipat Datar
Menurut Ikhsanul Iqbal, jarak bidik optimum waterpass berkisar antara 40-60 m. Adapun syarat-syarat pemakaian alat ukur sipat datar pada umumnya adalah sebagai berikut :
1. Syarat dinamis : sumbu I vertikal. 2. Syarat statis :
a. Garis bidik teropong sejajar dengan garis arah nivo. b. Garis arah nivo tegak lurus sumbu I (sumbu vertikal). c. Garis mendatar diafragma tegak lurus sumbu I.
Agar pengaturannya lebih sistematis, tidak berulang-ulang, maka urutan pengaturannya dibalik dari c ke a.
a. Mengatur Garis Arah Nivo Tegak Lurus Sumbu Vertikal (I)
Pada alat ukur sipat datar semua tetap, syarat ini sangat penting. Adapun cara mengatur agar garis arah nivo tegak lurus sumbu I, prosedurnya sama dengan membuat sumbu I vertikal pada theodolite dengan nivo tabung alhidade horisontal.
Adapun maksud dari persyaratan ini adalah apabila sumbu I telah dibuat vertikal, kemanapun teropong diputar, gelembung nivo akan tetap seimbang. Ini berarti garis bidik selalu mendatar karena garis bidik telah dibuat sejajar dengan garis arah nivo.
b. Membuat Garis Bidik Sejajar Garis Arah Nivo
Pada sipat datar, yang diperlukan adalah garis bidik mendatar. Apabila tidak dapat mengerti secara langsung apakah garis bidik sudah betul-betul mendatar atau tidak, dapat dibantu dengan nivo tabung. Jika gelembung nivo seimbang, garis arah nivo pasti mendatar. Dengan demikian, bisa membuat garis bidik sejajar dengan garis arah nivo, sehingga pada saat nivo seimbang garis bidik akan mendatar.
a4 c1
a0 c0
Gambar Dasar Teori-3 Membuat Garis Bidik Sejajar dengan Garis Arah Nivo (Sipil Booster, 2014)
Apabila garis bidik belum sejajar garis arah nivo, maka dapat dilakukan koreksi dengan cara :
1. Untuk alat tipe semua tetap tanpa sekrup pengungkit.
Arahkan garis bidik pada angka (a2-a4) pada rambu A dengan memutar sekrup koreksi diafragma atas dan bawah dengan pen koreksi dan gelembung nivo tetap seimbang.
2. Untuk alat tipe semua tetap dengan sekrup pengungkit.
Koreksi untuk alat semua tetap dengan sekrup ungkit dapat dilakukan dengan dua cara :
a. Koreksi sama seperti tipe tanpa sekrup ungkit seperti poin a di atas.
b. Arahkan garis bidik pada angka (a2-a4) pada rambu A dengan memutar sekrup ungkit sehingga gelembung nivo teropong menjadi tidak seimbang, kemudian diseimbangkan kembali dengan memutar sekrup koreksi nivo dengan pen koreksi.
Catatan : Pada alat ukur sipat datar tipe otomatis, kesalahan garis bidik masih dimungkinkan terjadi sehingga perlu dicek dan dibetulkan, dan prosedur koreksinya sama dengan pada alat tipe semua tetap tanpa sekrup pengungkit.
Secara umum dapat dikatakan bahwa beda tinggi antara dua titik adalah sama dengan pembacaan BT belakang dikurangi dengan pembacaan BT muka.
Teropong pada alat sipat datar ini biasanya dilengkapi dengan diafragma, pada teropong didapat suatu garis yang lurus ialah garis bidik. Garis bidik ini
A
B
harus dibuat mendatar, supaya dapat digunakan untuk menentukan beda tinggi antara dua titik. Supaya garis bidik mendatar maka diperlukan syarat – syarat yang harus dipenuhi antara lain :
a. Syarat utama, garis bidik teropong harus sejajar dengan garis arah nivo. Jika syarat ini tidak terpenuhi, maka akan terjadi kesalahan pembacaan rambu yang sebanding dengan jarak dari alat ukur ke rambu. b. Syarat kedua, garis arah nivo harus tegak lurus pada sumbu kesatu.
Syarat mengatur ini dapat dikontrol dengan memutar teropong terhadap sumbu satu dan nivo harus selalu dalam keadaan seimbang. Jika nivo tidak seimbang, diseimbangkan dengan memutar sekrup penyetel.
c. Syarat ketiga, garis mendatar diafragma harus tegak lurus pada sumbu kesatu. Syarat ini diperlukan guna memudahkan perkiraan pembacaan pada interval dari bagian – bagian rambu.
II.2 Metode Pengukuran
Ada banyak metode pengukuran yang bias digunakan dalam praktik dilapangan, masing-masing metode memiliki kelemahan dan kelebihan tersendiri sehingga kita harus memilih metode sesuai kebutuhan.
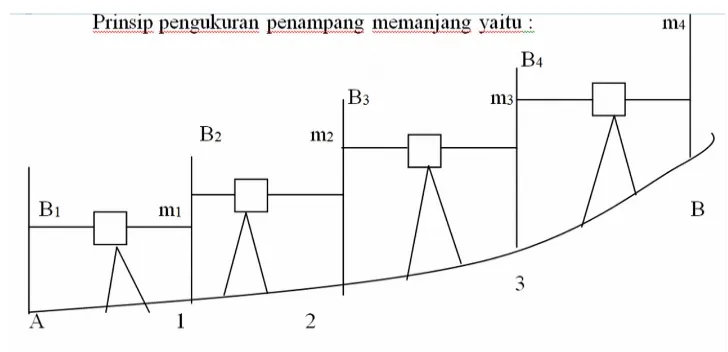
II.2.1 Pengukuran Penampang Memanjang
Gambar Dasar Teori-4 Pengukuran Penampang Memanjang (Aryadhani, 2012)
jaraknya, maka penampang dapat digambarkan. Bidang referensi terdekat yang dijadikan dasar penggambaran semua titik ditentukan terlebih dulu, kemudian digambar di atas kertas milimeter. Posisi mendatar dibuat dengan skala yang lebih kecil dibanding skala vertikal. Biasanya skala vertikal dibuat 10 kali lebih besar. Titik titik tersebut dihubungkan secara berurutan sehingga membentuk penampang memanjang. Di bawah garis referensi biasanya dibuat kolom-kolom tertentu yang disesuaikan dengan kebutuhan dalam perhitungan selanjutnya. Pengukuran profil memanjang dapat dilakukan dengan beberapa cara, tetapi yang dilakukan dengan dua cara :
1. Pengukuran pergi pulang
Pengukuran pergi pulang alat ditampatkan di atas titik/patok, sedangkan data yang diambil adalah :
a. Bacaan benang pergi dan pulang. b. Jarak langsung (jarak pita). c. Tinggi alat (Ta). Bila jarak pergi ≠ jarak pulang harus masuk dalam toleransi jarak maksimum, minimum dan diambil rata-ratanya.
a. Beda tinggi = Ta – Bt, beda tinggi pergi = pulang, bila berbeda hanya boleh
b. Titik tinggi = titik diket ± beda tinggi
c. Beda tinggi = Ta – Bt, beda tinggi pergi = pulang, bila berbeda hanya boleh angka terakhir dan diambil rata-ratanya (stand pergi).
d. Titik tinggi = titik diket ± beda tinggi.
2. Pengukuran Double Stand.
a. Bacaan benang stand I dan II muka belakang. Untuk membuat stand I dan II dapat dilakukan dengan cara setelah alat ditampatkan antara dua titik dan diambil bacaan benang (stand kemudian dinaikan/diturunkan atau digeser-geser kekiri ata kanan dan diambil bacaan benang (stand II).
b. Jarak pita (langsung)
c. Tinggi salah satu titik yang diketahui/ditentukan, bila belum diketahui harus dicari dari titik lainnya.
d. Sketsa gambar.
Pengolahan Data Double Stand Hitung :
a. Cek Bt = ½ (Ba + Bb)
b. Jarak diambil jarak pita, bila alat ditempatkan betul-betul dalam garis lurus antara dua titik maka, jarak optis dapat dipakai.
c. Jarak optis = (Ba – Bb) x 100, jarak stabd I = stand II, bila berbeda harus masuk dalam toleransi dan diambil rata-ratanya.
d. Beda tinggi = Bt.b – Bt.m, stand I = stand II, bila berbeda hanya dikeluarkan angka terakhir dan diambil rata-ratanya (stand I = stand II). e. Tinggi titik = tinggi titik diketahui ± beda tinggi
(My geomatics engineering, 2008). II.2.2 Syarat Pengukuran Sipat Datar Teliti
Untuk keperluan pengadaan jaring-jaring tinggi nasional maupun pekerjaan-pekerjaan rekayasa yang membutuhkan ketelitian yang tinggi, diperlukan pengukuran sipat datar. Untuk keperluan ini diperlukan pula alat ukur sipat datar teliti dengan ciri-ciri antara lain :
1. Sensivitas nivo atau pendulum tinggi (harga sudut kecil). 2. Perbesaran bayangan teropong lebih besar (sampai 30X). 3. Dilengkapi dengan plat planparalel.
4. Menggunakan rambu invar.
plat planparalel adalah sebuah prisma datar yang dipasang didepan lensa obyektif teropong yang dapat diputar dengan sumbu tegak lurus sumbu I, untuk mengatur posisi benang silang atau garis bidik pada pembagian garis pada rambu ukur.
Pada pengukuran sipat datar teliti, bacaan rambu tidak boleh terlalu rendah, minimal 0,5 m di atas permukaan tanah. Rambu harus diberi sepatu dan berdiri tegak dengan statip dan nivo rambu (My geomatics engineering, 2008).
II.3 Pengukuran Kerangka Vertikal
Kerangka vertikal merupakan teknik dan cara pengukuran kumpulan titik-titik yang telah diketahui atau ditentukan posisi vertikalnya berupa ketinggian, terhadap bidang referensi ketinggian (datum) tertentu. Bidang referensi ini biasanya berupa ketinggian muka air laut rata-rata (MSL) atau ditentukan lokal. Pengukuran Kerangka Vertikal dilakukan untuk mengetahui elevasi titik-titik di daerah yang diukur sehingga dapat digunakan untuk berbagai keperluan praktis lainnya.
Terdapat tiga metode yang dapat digunakan, yaitu:
1. Metode Sipat Datar, dimana prinsipnya adalah mengukur tinggi bidik alat sipat datar optis di lapangan menggunakan rambu ukur.
2. Pengukuran Trigonometris prinsipnya adalah mengukur jarak langsung (Jarak Miring), tinggi alat, tinggi, benang tengah rambu ukur, dan sudut Vertikal (Zenith atau Inklinasi).
3. Pengukuran Barometris pada prinsipnya adalah mengukur beda tekanan atmosfer.
Metode sipat datar merupakan metode yang paling teliti dibandingkan dengan metode trigonometris dan barometris.
pengukuran waterpass. Elevasi adalah jarak vertikal (ketinggian) yang diukur terhadap bidang datum. Elevasi jaringan kontrol vertikal didasarkan atas elevasi pada titik Bench Mark (BM) yang telah ada di dalam atau yang ada di dekat daerah pengukuran. Bench Mark (BM) adalah titik yang tetap (biasanya berbentuk patok beton) yang telah diketahui elevasinya terhadap datum yang digunakan untuk acuan pengukuran elevasi daerah sekelilingnya. Bila daerah tersebut belum diketahui/belum ada titik BM yang elevasinya diketahui, elevasi BM dapat ditentukan secara lokal (dimisalkan ± 0.000, +100, +1000, dsb).
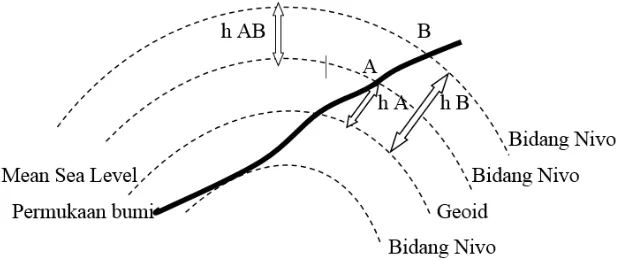
Geoid adalah bidang equipotensial gaya berat (bidang nivo) yang berimpit dengan muka air laut rata-rata(mean sea level) yang tidak terganggu (Villanueva, K.J., 1979). Tinggi diukur sepanjang garis arah gaya berat (unting-unting) yang melalui titik yang bersangkutan. Garis arah gaya berat memotong bidang nivo tegak lurus. Bentuk bidang nivo bergantung pada harga gaya berat. Karena adanya kenyataan bahwa harga gaya berat bervariasi di setiap titik tergantung distribusi massa bumi menyebabkan bidang-bidang nivo tidak saling sejajar satu sama lain (tidak saling sejajar tetapi tidak saling berpotongan karena saling melingkupi). Hal ini menyebabkan jarak antara dua bidang nivo menjadi tidak tetap dan inilah yang membawa kompilasi dalam pendefinisian sistem tinggi.
Gambar Dasar Teori-5 Bidang Referensi Ketinggian (Noor, 2013).
II.4 Tinggi Orthometris
Tinggi orthometris adalah jarak yang diukur sepanjang garis unting-unting dari titik itu sampai geoid. Geoid adalah bidang referensi untuk sistem ketinggian ini. Untuk mendapat tinggi orthometris yang tepat maka bilangan geopotensial dibagi dengan suatu harga menengah gaya berat sepanjang garis unting-unting, antara titik bersangkutan dan geoid. (Ir. Sutomo Kahar, 2007)
Tinggi orthometris dapat dituliskan sebagai berikut:
...(2.1)
Dimana adalah gaya berat menengah sepanjang garis unting-unting antara geoid dan titik pengamatan di permukaan tanah, didapatkan dengan rumus:
...(2.2)
Dimana g(z) adalah nilai gaya berat di Q.
Menurut reduksi Prey:
Dalam hal ini g adalah gaya berat ukursn di suatu titik di tanah. Sehingga
persamaan menjadi:
...(2.4)
Faktor 0,0424 diperoleh bila digunakan rapat massa standart ρ = 2.67 g/cm3:
Untuk mendapat massa sembarang, dengan rumus:
...(2.5)
Dimana:
G = Konstanta gaya berat Newton
= Gaya berat normal
ɣ
Substansi dari persamaan (2.1) dan (2.4), maka diperoleh:
...(2.6)
Disebut tinggi orthometris Helmert.
OCAB=DCAB+DCA0B+DCB0B...(2.7)
II.5 Metode Perhitungan Kerangka Vertikal
Ada banyak metode perhitungan yang bisa digunakan dalam mengolah data lapangan, masing-masing metode memiliki kelemahan dan kelebihan tersendiri sehingga kita harus memilih metode sesuai kebutuhan.
Pengukuran Beda Tinggi antara Dua Buah Titik
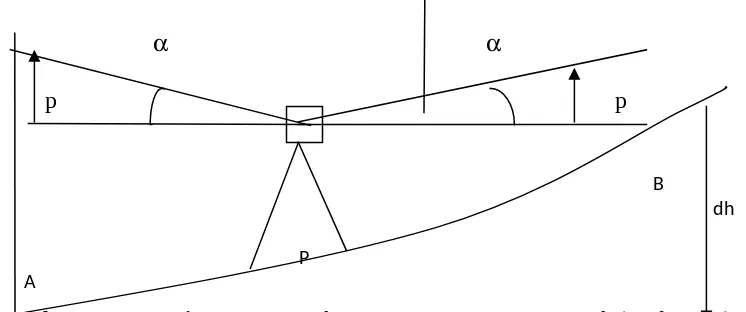
Mekanisme pengukuran sipat datar adalah seperti di bawah ini :
p p
B
dh
P A
Gambar Dasar Teori-6 Cara Mengukur Sipat Datar Antara Dua Titik (Lutfi, 2015)
Pengukuran beda tinggi dilakukan dengan menggunakan alat sipat datar (waterpass). Alat didirikan pada suatu titik yang diarahkan pada dua buah rambu yang berdiri vertikal. Maka beda tinggi dapat dicari dengan menggunakan pengurangan antara bacaan muka dan bacaan belakang.
Rumus beda tinggi antara dua titik :
BT = BTB – BTA...(2.8)
Keterangan :
BTA = bacaan benang tengah A
BTB = bacaan benang tengah B
Sebelum mendapatkan beda tinggi antara dua titik, diperlukan dulu pembacaan benang tengah titik tersebut, dengan menggunakan rumus :
BT = BA + BB / 2
Keterangan :
BT = bacaan benang tengah
BA = bacaan banang atas
BB = bacaan benang bawah
Untuk mencari jarak optis antara dua titik dapat digunakan rumus sebagai berikut :
J = (BA – BB) x 100...(2.9)
Keterangan :
J = jarak datar optis
BA = bacaan benang atas
BB = bacaan benang bawah
100 = konstanta pesawat
Dalam setiap pengukuran tidaklah lepas dari adanya kesalahan pembacaan angka, sehingga diperlukan adanya koreksi antara hasil yang didapat di lapangan dengan hasil dari perhitungan.
Fungsi dari pengukuran beda tinggi ini, antara lain :
a. Merancang jalan raya, jalan baja, dan saluran-saluran yang mempunyai garis gradien paling sesuai dengan topografi yang ada.
b. Merencanakan proyek-proyek konsruksi menurut evaluasi terencana.
d. Menyelidiki ciri-ciri aliran di suatu wilayah.
e. Mengembangkan peta-peta yang menunjukkan bentuk tanah secara umum.
Digunakan untuk mementukan ketinggian titik-titik yang menyebar dengan kerapatan tertentu untuk membuat garis-garis ketinggian (kontur).
Selaama proses pengukuran sipat datar akan dilakukan proses dengan istilah sebagai berikut :
a. Station, merupakan titik dimana rambu ukur ditegakan, bukan tempat alat sipat datar ditempatkan. Tetapi pada pengukuran horizontal, stasion adalah titik tempat berdiri alat.
b. Tinggi alat, adalah tinggi garis bidik di atas tanah dimana alat sipat datar didirikan.
c. Tinggi garis bidik, adalah tinggi garis bidik di atas bidang referensi ketinggian (permukaan air laut rata-rata)
d. Pengukuran ke belakang, adalah pengukuran ke rambu yang ditegakan di station yang diketahui ketinggiannya, maksudnya untuk mengetahui tingginya garis bidik. Rambunya disebut rambu belakang.
e. Pengukruan ke muka, adalah pengukuran ke rambu yang ditegakan di station yang diketahui ketinggiannya, maksudnya untuk mengetahui tingginya garis bidik. Rambu di sebut rambu muka.
f. Titik putar (turning point), adalah station dimana pengukuran ke belakang dan ke muka dilakukan pada rambu yang ditegakan di station tersebut. II.5.1 Deteksi Blunder
Kesalahan ini dapat terjadi karena kurang hati-hati dalam melakukan pengukuran atau kurang pengalaman dan pengetahuan dari praktikan.Apabila terjadi kesalahan ini, maka pengukuran harus di ulang atau hasil yang mengalami kesalahan tersebut dicoret saja.
ukuran yang mempunyai selisih besar dari nilai rerata kemungkinan merupakan data blunder.
Sumber : Kesalahan personal (kecerobohan pengukur)
Efek : Hasil pengukuran yang tidak homogen.
Penanganan : Harus dideteksi dan dihilangkan dari hasil pengukuran Adapun langkah-langkah yang bisa dilakukan untuk menghindari terjadinya kesalahan besar ini yaitu:
1. Cek secara hati-hati semua objek yang akan diukur.
2. Melakukan pembacaan hasil ukuran secara berulang untuk mengecek kekonsistenan.
3. Memverifikasi hasil yang dicatat dengan yang dibaca.
4. Mengulangi seluruh pengukuran secara mandiri untuk mengecek kekonsistenan data
5. Penggunakan rumus aljabar atau geometrik sederhana untuk mengecek kebenaran hasil ukuran. Misalnya dalam pengukuran sudut sebuah segitiga, jumlah ketiga sudutnya sama 180 derajat
Distribusi normal adalah distribusi dari variabel acak kontinu. Kadang-kadang distribusi normal disebut juga dengan distribusi Gauss. Distribusi ini merupakan distribusi yang paling penting dan paling banyak digunakan di bidang statistika.
Fungsi densitas distribusi normal diperoleh dengan persamaan sebagai berikut:
dimana
π = 3,1416
e = 2,7183
µ = rata-rata
σ = simpangan baku
... (2.11)
vi : residu
S0 : Standar Deviasi Pengukuran =
qii : elemen diagonal matrik kofaktor residual (Qvv)
... (2.12)
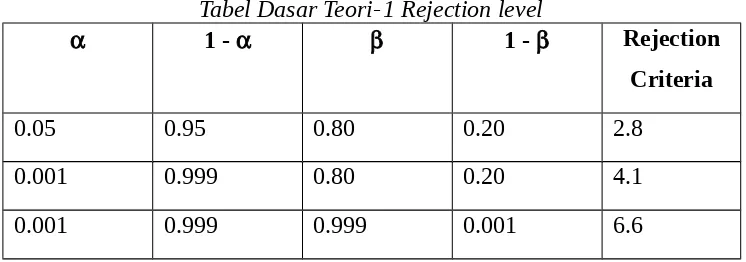
Tabel Dasar Teori-1 Rejection level
1 - 1 - Rejection
Criteria
0.05 0.95 0.80 0.20 2.8
0.001 0.999 0.80 0.20 4.1
0.001 0.999 0.999 0.001 6.6
II.5.2 Koreksi Gaya Berat
Metode gravitasi umumnya digunakan dalam eksplorasi jebakan minyak (oil trap). Disamping itu metode ini juga banyak dipakai dalam eksplorasi mineral dan lainnya.
Prinsip pada metode ini mempunyai kemampuan dalam membedakan rapat massa suatu material terhadap lingkungan sekitarnya. Dengan demikian struktur bawah permukaan dapat diketahui. Pengetahuan tentang struktur bawah permukaan ini penting untuk perencanaan langkah-langkah eksplorasi baik minyak maupun mineral lainnya. Untuk menggunakan metode ini dibutuhkan minimal dua alat gravitasi, alat gravitasi yang pertama berada di base sebagai alat yang digunakan untuk mengukur pasang surut gravitasi, alat yang kedua dibawa pergi ke setiap titik pada stasiun mencatat perubahan gravitasi yang ada. Biasanya dalam pengerjaan pengukuran gravitasi ini, dilakukan secara looping. (Purwansyah, 2012)
II.5.3 Metode Bowditch
Metode Bowditch merupakan metode hitung perataan dimana kesalahan yang terdapat pada pengukuran dibagi rata kepada sejumlah parameter. Perhitungan dengan metode Bowditch pada pengukuran kelompok ini dilakukan sebanyak tiga kali.
II.5.4 Metode Least Square
Koreksi (V) = -AT [A.AT]-1 F...(2.13) V : Koreksi jarak
A: Merupakan angka 1 dan 0 sebagai identitas yang dilihat dari arah loopnya
F : Penjumlahan beda tinggi sesuai dengan loop dan kerangka utamanya. (Djanur, 2013)
Misalnya kita melakukan pengukuran jarak antar dua titik sebanyak 3 (tiga) kali l1, l2 dan l3 sedangkan jarak sebenarnya kedua titik tersebut adalah la. Karena pengukuran l1, l2 dan l3 mengandung kesalahan maka ada koreksi untuk masing-masing pengukuran misal v1, v2 dan v3. Persamaan antara 3 (tiga) pengukuran tersebut dengan koreksinya terhadap la adalah:
(l1+v1)=la...(2.14)
(l2+v2)=la... (2.15)
(l3+v3)=la... (2.16)
Koreksi v1, v2 dan v3 bisa bernilai positif atau negatif.
Pengukuran yang dilaksanakan dengan benar akan menghasilkan nilai koreksi yang kecil untuk v1, v2 dan v3. Karena nilai koreksi ada yang positif dan negatif, untuk pengukuran yang benar, nilai v12 + v22 + v32 akan minimum. Atau dalam bentuk umum
...(2.17)
...(2.18)
PELAKSANAAN PRAKTIKUM
Persiapan Praktikum
Hal yang perlu disiapkan sebelum memulai praktikum adalah survey lokasi yang akan kita ukur, dengan survey terlebih dahulu kita dapat memperkirakan lokasi serta bentuk polygon atau loop yang akan dibuat. Selain survey lokasi, kita juga perlu mempersiapkan alat ukur waterpass beserta kelengkapannya dan beberapa peralatan pendukung praktikum lainnya seperti payung, meteran, patok, topo, alat tulis dan lain-lain.
a. Lokasi Praktikum
Praktikum ini dilaksanakan di Fakultas Perikanan dan Kelautan UNDIP.
Gambar III. 1 Lokasi Pengukuran
b. Waktu Pelaksanaan
Pengukuran dilaksanakan tiga hari pada tanggal 2-4 Mei 2017.
Peralatan
Peralatan yang digunakan pada praktikum ini diantaranya : a. Paku payung
b. Meteran
c. Correct pen atau pylox d. Tripod (1 buah)
e. Waterpass Topcon AT 100 D f. Rambu Ukur (2 buah) g. Meteran 50 m (1 buah) II.6 Spesifikasi Waterpass
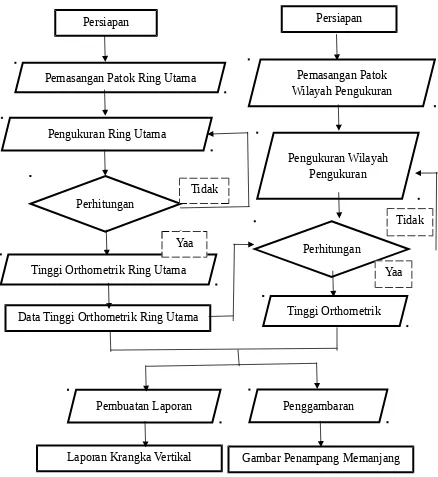
II.7 Diagram Alir Pelaksanaan
Berikut adalah diagram alir Praktikum Kerangka Vertikal III.3.1.Diagram Alir Pelaksanaan Praktikum
Gambar III. 2 Diagram alir pelaksanaan praktikum
Persiapan
Pemasangan Patok Ring Utama
Pengukuran Ring Utama
Perhitungan
Tidak
Penggambaran Tinggi Orthometrik Ring Utama
Pembuatan Laporan
Gambar Penampang Memanjang Laporan Krangka Vertikal
Yaa
Data Tinggi Orthometrik Ring Utama
Persiapan
Pemasangan Patok Wilayah Pengukuran
Pengukuran Wilayah Pengukuran
Perhitungan
Yaa Tidak
III.3.2. Diagram Alir Pelaksanaan Pengukuran
Persiapan dan Perencanaan
Pengukuran
Cek selisih Pergi Pulang
Penentuan Kelas Orde
Penentuan Tinggi Orthometrik
Tinggi Orthometrik Ya
III.4 Pelaksanaan Praktikum II.7.1 Persiapan Praktikum
Pada persiapan pelaksanaan praktikum, hal yang perlu dilakukan adalah survei lokasi yang nantinya akan diukur dan mempersiapkan alat ukur berupa Waterpass apakah masih layak untuk digunakan atau tidak dalam praktikum. II.7.2 Pemasangan Patok
Sebelum melakukan pengukuran suatu daerah, terlebih dahulu harus ditentukan patok-patok untuk pengukuran. Patok ini biasanya disebut Kerangka Utama pengukuran.
1) Tujuan
Tujuan dari pemasangan patok ini adalah sebagai Kerangka Utama horizontal (x,y) dan vertikal (z). Selain itu patok juga berguna sebagai acuan tempat berdiri alat dan untuk menandai titik-titik yang menjadi acuan dalam pengukuran serta untuk diketahui ukuran jaraknya. Apabila pekerjaan pemasangan patok sudah selesai, maka dapat dilakukan
1. Mempersiapkan alat dan bahan.
2. Untuk daerah yang tidak berupa tanah atau berupa aspal dan paving maka digunakan patok dari paku payung.
3. Menentukan titik–titik mana saja yang akan dipasang patok sesuai kebutuhan, yaitu jarak yang disesuaikan dengan medan daerah. 4. Memberikan tanda yang jelas pada tiap patok agar memudahkan
dalam melakukan kegiatan pengukuran.
Gambar III. 3 Patok II.7.3 Pengukuran
1) Tempatkanlah Waterpass di antara patok P1 dan P2, usahakan alat ditempatkan di tengah dan Waterpass dengan P1 dan P2 memiliki jarak yang sama agar dapat meminimalkan kesalahan.
2) Centering nivo Waterpass tersebut.
3) Setelah dilakukan centering, kemudian arahkan Waterpass ke P1 dan bacalah serta catatlah BT, BA dan BB, ini disebut data BT belakang untuk stand 1. Namun dalam penggunaan Waterpass digital, data yang dihasilkan dari pembacaan barcode adalah jarak vertikal (BT) dan jarak horizontal (jarak dari titik yang ditembak ke alat).
4) Setelah dicatat kemudian Waterpass diarahkan ke P2 tanpa memindah kedudukan Waterpass kemudian baca dan catat BA, BT, dan BB atau mencatat data yang dibaca oleh Waterpass digital, untuk data pengukuran BT muka stand 1.
5) Hitung beda tinggi P1 dan P2 yaitu dengan mengurangkan BT belakang dengan BT mukanya, untuk beda tinggi stand 1.
6) Lakukan seperti langkah di atas untuk stand 2.
7) Ulangi pembacaan benang di patok selanjutnya sampai akhir (Waterpass pergi).
II.7.4 Perhitungan
Perhitungan dilakukan setelah diperoleh data pengukuran Waterpass. Untuk melakukan perhitungan dapat dilihat pada Bab II Dasar Teori dan penerapan dapat dilihat pada bab IV Hasil dan Pembahasan.
II.7.5 Penggambaran 1) Tujuan
Tujuan dari penggambaran ini adalah untuk memberikan gambaran tentang beda tinggi dan elevasi titik daerah yang diukur serta bermaksud untuk memberikan informasi data pengukuran.
2) Alat dan Bahan a) Laptop / PC. b) Plotter. c) Kertas HVS.
3) Pelaksanaan Penggambaran
a) Mempersiapkan data–data hasil pengukuran dan perhitungan waterpass.
b) Menggambar penampang memanjang dengan menggunakan aplikasi AutoCAD dengan skala horizontal 1:1000 (atau menyesuaikan jarak) dan skala vertikal 1:1000.
c) Menggambarkan tinggi titik sesuai dengan tinggi yang diperoleh dari pengukuran dan perhitungan waterpass dengan menggunakan aplikasi AutoCAD.
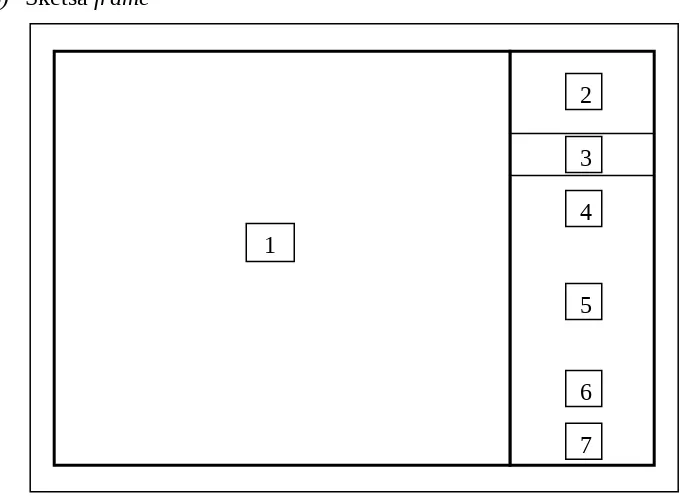
4) Sketsa frame
Gambar III. 4 Format Hasil Plotting Penggambaran
Keterangan :
1. Gambar penampang memanjang 2. Logo dan nama jurusan
3. Judul gambar 4. Skala Gambar 5. Legenda
6. Nama dan anggota kelompok 7. Kolom pengesahan
III.5 Pelaksanaan Pengukuran
Pengukuran waterpass kali ini bertujuan untuk menentukan beda tinggi antar titik dengan menggunakan waterpass instrument, menentukan elevasi titik dari titik awal dengan menggunakan beda tinggi antar titik dan menghasilkan penampang memanjang dari pengukuran yang dilakukan.Adapun langkah-langkahnya :
1
2
3
4
5
6
1. Tempatkanlah waterpass diantara patok TK 22 dan P1, usahakan alat ditempatkan ditengah-tengah agar dapat meminimalkan kesalahan. 2. Aturlah waterpass tersebut sebelum digunakan.
Langkah-langkah mengatur waterpass:
Gambar III. 5 Mengatur Gelembung Nivo
a. Apabila nivo belum berada tepat ditengah tabung nivo maka putarlah sekrup A dan B beralawanan arah (masuk semua atau keluar semua)
b. Putar sekrup C agar nivo masuk dalam lingkaran tengah tabung
Gambar III. 6 Sentering Gelembung Nivo
3. Setelah dilakukan penyetelan, kemudian arahkan waterpass ke TK 22 dan bacalah serta catatlah BT, BA dan BB, ini disebut data BT belakang untuk stand 1. Namun dalam penggunaan waterpass digital, data yang dihasilkan dari pembacaan barcode adalah jarak vertikal (BT) dsn jarak horizontal (jarak dari titik yang ditembak ke alat).
A
B
C
A
B
BA=1,360
BT=1,335
BB=1,310
Cara pembacaan BT, BA, dan BB :
Gambar III. 7 Cara Membaca BA, BT, dan BB
BT, BA, dan BB harus memenuhi rumus:
BT = (BA+BB)/2...(3.1) Dimana :
BT : Benang Tengah BA : Benang Atas BB : Benang Bawah
Cara pencatatan BT, BA, dan BB :
Tabel III. 1 Sampel Formulir Tabel Pencatatan Data
Te
k Bacaan Rambu Jarak dari
Beda tinggi
Benang atas=a rambu ke alat Jarak Benang tengah=t Benang bawah=b
Jarak Optis Antar
2t = a+b Patok
Belakang Muka Belakang Muka Belakang Muka Naik Turun
5. Hitung beda tinggi P1 dan TK 22 yaitu dengan mengurangkan BT belakang dengan BT mukanya, untuk beda tinggi stand 1.
6. Lakukan seperti langkah diatas untuk stand 2.
7. Ulangi pembacaan benang di patok selanjutnya sampai akhir (Waterpass pergi).
8. Setelah dilakukan pembacaan waterpass pergi kemudian lakukan pembacaan lagi tetapi dengan pembacaan pulang yaitu antara P1 dan P2 dan seterusnya sampai selesai dengan mendirikan alat dua kali (double stand).
A. Keselamatan Kerja 1. Alat
a. Melindungi alat dari panas matahari dan hujan ssecara langsung b. Dilarang untuk membanting dan menduduki alat maupun tempat
alat
c. Menjaga agar nivo dan statif tetap stabil 2. Surveyor
a. Menjaga stamina tubuh dan konsentrasi b. Cukup istirahat
A. Referensi Tinggi
Ketinggian yang diperoleh berdasarkan titik referensi (MSL) yang berada di Pelabuhan Tanjung Emas Semarang. Dari titik referensi tersebut diukur keatas menuju daerah Banyumanik, tepatnya di BM yang berada di depan Swalayan ADA. Kemudian dari BM tersebut ditarik menuju BM yang berada di jalan Prof. Soedarto, SH., tepatnya didekat Bundaran Kampus UNDIP Tembalang. Titik tersebut ditarik menuju GD 08 yang berada didekat Fakultas Perikanan dan Ilmu Kelautan.GD 08 inilah yang menjadi titik ikat untuk waterpass tertutup kelompok V-A.
III.6 Pengolahan Data
BAB III
HASIL DAN PEMBAHASAN
III.1 Kring Utama III.1.1 Hasil
Pengukuran waterpas tertutup kerangka utama dilakukan dengan metode pergi dan pulang secara BFFB serta pengukurannya harus kembali ke titik awal. Dari pengukuran waterpas didapat bacaan BT yang digunakan untuk menentukan beda tinggi dan tinggi titik tiap patok. Pengukuran waterpas tertutup kerangka utama didapat hasil sebagai berikut :
Slag
ΔH benar
H bm 05
Dari Ke 210,096 1
1 2 -2,42216 207,6738 2 2 3 -0,39951 207,2743 bm 28 3 4 0,173042 207,4474 3 4 5 -0,89311 206,5543 4 5 6 -1,12776 205,4265 5 6 7 -1,43551 203,991 bm 20 7 8 -0,98876 203,0022 6 8 9 -2,50756 200,4947 7 9 10 -1,93361 198,5611 bm 14 10 11 -1,01706 197,544
III.1.2 Pembahasan
Hasil perhitungan pada Tabel IV.1 diperoleh dari pengukuran dan perhitungan dengan metode “Pergi Pulang dengan BFFB”.
A. Beda Tinggi Pergi
Untuk mendapatkan beda tinggi “Pergi”, pengukuran dilakukan dengan Stand 1 dan Stand 2. Berikut langkah kerjanya :
2. Alat didirikan kembali ditempat yang berbeda ditengah GD 05 dan P1, mendirikan rambu di GD 05 dan P1. GD 05 sebagai bacaan belakang dan P1 sebagai bacaan muka, kemudian baca dan catat dH, jarak, ketinggian. Lakukan sampai waterpas berdiri diantara P107 dan GD 05 untuk pengukuran Stand 2.
Setelah data “Pergi” baik untuk Stand 1 dan Stand 2 didapat, kita melakukan perhitungan untuk mendapatkan beda tinggi antara kedua titik tersebut. Berikut langkah perhitunganya :
a. Untuk mencari beda tinggi dengan rumus ( BT belakang – BT muka)
b. Menghitung rata-rata beda tinggi dengan rumus :
Rata-rata beda tinggi GD 05 ke P1 =
Untuk mendapatkan beda tinggi “Pulang”, pengukuran dilakukan dengan Stand 1 dan Stand 2. Berikut langkah kerjanya :
a. Alat didirikan ditengah GD 05 dan P107, mendirikan rambu di GD 05 dan P07. GD 05 sebagai bacaan belakang dan P07 sebagai bacaan muka, kemudian baca dan catat dH, jarak, ketinggian. Lakukan sampai waterpas berdiri diantara P2 dan GD 05 untuk pengukuran Stand1. b. Alat didirikan kembali ditempat yang berbeda ditengah GD 05 dan P07,
a. Untuk mencari beda tinggi dengan rumus pada (2.1)
b. Menghitung rata-rata beda tinggi dengan rumus (2.4) :
Rata-rata beda tinggi =
Rata-rata beda tinggi GD 05 ke P2 =
Lakukan hal yang sama hingga ke GD 05 kembali. C. Perhitungan Elevasi Titik
Setelah mendapatkan beda tinggi pergi dan pulang, kita akan mencari elevasi titik dengan cara perhitungan :
a. Menghitung beda tinggi rata-rata pulang dan pergi dengan rumus (2.5) :
Rata-rata beda tinggi =
Rata-rata beda tinggi GD 05 ke P2 =
Lakukan hal yang sama hingga ke GD 05 kembali.
b. kemudian mencari koreksi tiap titik dengan metode least square dimana tahapannya sebagai berikut :
1) Menghitung beda tinggi rata rata pulang pergi dari setiap loop yang digunakan dalam pengukuran dengan perhitungan:
Rata-rata beda tinggi =
= -2.4512 m
2) Mendefinisikan beda tinggi yang digunakan dalam loop dalam matriks indentitas yang disebut matriks A
3) Lalu mencari nilai matriks L, dimana matriks L itu sendiri adalah hasil jumlah pengkuran beda tinggi dari setiap pengukuran didalam loop
4) Selanjutnya menghitung nilai V atau residu untuk mendapatkan koreksi setiap titik pada pengukuran, dengan rumus seperti ini :
untuk hasilnya seperti dibawah ini :
Hasil koreksi pertitik kring utama
Slag menggunakan rumus (2.8). Definitif ini memiliki syarat yaitu penjumlahan dari seluruh definitif hasilnya harus nol
Rumus Definitif = Beda tinggi +Koreksi Tiap Titik
Definitif dari GD 05 ke P2 = -2.4512 + (-0.11072)
= -2.5618 m
Lakukan cara yang sama hingga diketahui definitif titik GD 05 ke P07
Perhitungan terakhir adalah mencari elevasi titik dan terdapat di rumus (2.9). Untuk elevasi awal diketahui 210.096
d. Elevasi awal ini berguna untuk mencari elevasi titik selanjutnya.
Elevasi titik P2 = Elevasi Titik GD 05 + Beda Tinggi Definitif
GD 05 ke P2 = 210.0960 m + (-0.11072) m
= 207.5342 m
Melakukan hal yang sama sampai kembali ke elevasi awal yaitu titik GD 05.
D. Limitasi Kesalahan
Pada pengukuran waterpas tertutup terdapat tingkat ketelitian yang dapat dicari dengan rumus berdasarkan SNI :
Orde 1 = 2.0√ Skm = 2,0√4.0336 = 4.016764867 mm
Orde 2 = 4.0√ Skm = 4,0√4.0336 = 8.033529735mm
Orde 3 = 8.0√ Skm = 8,0√4.0336 = 16.06705947mm
Koreksi Pengukuran = 0,7mm
Jadi karena jumlah hasil koreksi sebesar 2.45 mm dan lebih kecil dari ketelitian orde 1 yaitu 4.09123 mm, jadi pengukuran masuk kedalam orde 1.
III.2 Kring Kelompok V A
III.2.1 Blunder dan Distribusi Normal
dua. Apabila perbedaan beda tinggi antar pengukuran melebihi 0.003 m, lakukan pengukuran ulang. Karena kemungkinan besar pengukuran tersebut mengandung kesalahan acak.
III.2.1.1 Hasil
III.2.1.2 Pembahasan
Kesalahan blunder adalah kesalahan yang disebabkan oleh ketidakhati-hatian pengukur, faktor alat dan faktor alam. Berikut adalah cara perhitungan blunder :
a. Perhitungan
1. Memasukkan data perhitungan beda tinggi
Dalam input data, beda tinggi dimasukkan dalam nilai positif, untuk memudahkan perhitungan.
Contoh : beda tinggi antara P2 dengan titik P3 Beda tinggi pergi : Stand I = | 1,5480 m|
Stand II = | 1,5470 m| Beda tinggi pulang: Stand I = | -1,5470 m |
Stand II = | -1,5460 m |
2. Kuadrat setiap data beda tinggi
Dengan mengkuadratkan beda tinggi setiap titik, maka akan diperoleh nilai yang digunakan untuk pembanding terhadap nilai yang benar.
Contoh : data beda tinggi antara P2 dengan titik P3 Beda tinggi pergi : Stand I = 1,5480 m
Stand II = 1,5470 m Beda tinggi pulang: Stand I = 1,5470 m Stand II = 1,5460 m
∑yi2 = 1,5480 2m + 1,5470 2m +(-1,5470) 2m + (-1,5460 ) 2m
= 9,5728 m 3. Mencari rataan beda tinggi
Rata – rata ∆H = 4. Mencari nilai S2
S2 = ∑y
5. Mencari nilai S
S = √S2 / 3
= √0,000006032/3 = 0,001418 m 6. Mencari nilai N 95%
Nilai N 95% didapat dari referensi, nilainya sebesar 1,96000
7. Mencari nilai µ
µ = N95% x S
= 0,002779 m
Membandingkan nilai (rataan-µ dengan rataan+µ) Rataan - µ< x <Rataan + µ
-1,5470 m - 0,002779 m< x < 1,5470 m+ 0,002779m -1,5490 m < x < 1,5490 m
Beda tinggi pergi : Stand I = 1,5480 m Stand II = 1,5470 m Beda tinggi pulang: Stand I = 1,5470 m Stand II = 1,5460 m
Dengan demikian, pengukuran 4 data beda tinggi masuk dalam toleransi kepercayaan 95%. Lakukan perhitungan di semua titik pengukuran.
b. Analisis hasil data
Dalam pengukuran dan perhitungan data blunder, yang harus diperhatikan adalah :
1. Melakukan pembacaan bak ukur dengan hati – hati
2. Mengolah data beda tinggi sesaat sebelum alat dipindahkan, sehingga blunder besar dapat dihindari
3. Mengulang bacaan bak dengan ketinggian alat bebeda, manakala ditemukan data blunder beda tinggi yang cukup besar.
III.2.2 Hitungan Bowditch III.2.2.1 Hasil
menentukan beda tinggi dan tinggi titik tiap patok. dari pengukuran waterpas tertutup kelompok didapat hasil sebagai berikut :
Tabel HASIL DAN PEMBAHASAN-3 HasilKring kelompok menggunakanBowditch
Tabel HASIL DAN PEMBAHASAN-4 Hasil perhitungan loop 1
Tabel HASIL DAN PEMBAHASAN-5 Hasil perhitungan loop 2
Tabel HASIL DAN PEMBAHASAN-6 Hasil perhitungan loop 3
III.2.2.2 Pembahasan
Hasil perhitungan pada Tabel IV.3 diperoleh dari pengukuran dan perhitungan dari Kring angkatan dan Kring kelompok VA dengan metode “Pergi Pulang”.
Untuk mendapatkan beda tinggi “Pergi”, pengukuran dilakukan dengan Stand 1 dan Stand 2. Berikut langkah kerjanya :
1. Alat didirikan ditengah GD 06 dan P1 mendirikan rambu di GD 06 dan P1. GD 06 sebagai bacaan belakang dan P1 sebagai bacaan muka, kemudian baca dan catat BA, BB, BT.
Lakukan sampai waterpas berdiri diantara P22 dan GD 06 untuk pengukuran Stand 1.
2. Alat didirikan kembali dengan tempat yang berbeda ditengah GD 06 dan P1, mendirkan rambu di GD 06 dan P1. P1 sebagai bacaan belakang dan GD 06 sebagai bacaan muka,
kemudian baca dan catat BA, BB, BT. Lakukan sampai waterpas berdiri diantara P22 dan GD
06 untuk pengukuran Stand 2.
Dari pengukuran seperti yang di atas di dapat data sebagai berikut:
Tabel HASIL DAN PEMBAHASAN-7 Hasil Pengukuran Pergi
Setelah data “Pergi” didapat, kita melakukan perhitungan untuk mendapatkan beda tinggi antara kedua titik tersebut.Berikut langkah perhitunganya :
a. Untuk mencari beda tinggi dengan rumus ( BT belakang – BT muka) Beda tinggi dari P4 ke P5, Stand 1 : m–m= m
S Stand 2 : m–m= m
Lakukan hal yang sama sampai semua titik diketahui beda tingginya.
b. Menghitung rata-rata beda tinggi dengan rumus (2.4) :
Rata-rata beda tinggi =
Rata-rata beda tinggi P4 ke P5 =
2 )) ( ((m m
= - mm
Lakukan hal yang sama hingga ke GD 06 kembali.
b. Beda Tinggi Pulang
Untuk mendapatkan beda tinggi “Pulang”, pengukuran dilakukan dengan Stand 1 dan Stand 2.
Berikut langkah kerjanya :
1. Alat didirikan ditengah GD 06 dan P22, mendirikan rambu P22 dan GD 06. GD 06 sebagai bacaan belakang dan P22 sebagai bacaan muka, kemudian baca dan catat BA, BB, BT.
2. Alat didirikan kembali dengan tempat yang berbeda ditengah GD 06 dan P22, mendirkan rambu di GD 06 dan P22. P22 sebagai bacaan belakang dan GD 06 sebagai bacaan muka,
kemudian baca dan catat BA, BB, BT. Lakukan sampai waterpas berdiri diantara P1 dan GD
06 untuk pengukuran Stand 2.
Dari pengukuran seperti yang di atas di dapat data sebagai berikut:
Tabel HASIL DAN PEMBAHASAN-8 Hasil Pengukuran Pulang
Setelah data “Pulang” didapat, kita melakukan perhitungan untuk mendapatkan beda tinggi antara kedua titik tersebut. Berikut langkah perhitunganya :
a. Untuk mencari beda tinggi dengan rumus ( BT belakang – BT muka)
Beda tinggi dari P5 ke P4,
Stand 1 : m -m= m
Stand 2: m – m = m
Lakukan hal yang sama sampai semua titik diketahui beda tingginya.
b. Menghitung rata-rata beda tinggi dengan rumus (2.4) :
Rata-rata beda tinggi =
Rata-rata beda tinggi P5 ke P4 =
2
) 2,050 2,054
( m m
=2,052 m
c. Analisa perhitungan
Perhitungan dengan metode Bowditch untuk nilai koreksi dibagi secara tidak merata tanpa
memperhatikan parameter-parameter yang ada. Data pengukuran saling keterkaitan satu sama lain , sehingga apabila dalam pengukuran terdapat koreksi yang besar dalam 1 titik , maka semua akan terpengaruh.
III.2.3 Hitungan Least Square (Kondisi Tanpa Bobot) III.2.3.1 Hasil
Hasil dari perhitungan kondisi kelompok VA adalah sebagai berikut : Tabel HASIL DAN PEMBAHASAN-9 Hasil Perhitungan kondisi
III.2.3.2 Pembahasan
Setelah kita mendapatkan beda tinggi rata-rata, selanjutnya kita mencari koreksi pengukuran, dengan cara metode perhitungan kondisi. Dan didapat koreksi sebesar = m.
Mendefinisikan beda tinggi yang digunakan dalam loop dalam matriks identitas yang disebut matriks A
Tabel HASIL DAN PEMBAHASAN-10 Matrik A
lalu mencari nilai matriks F, dimana matriks F itu sendiri adalah hasil jumlah pengkuran beda tinggi dari setiap pengukuran didalam loop
Tabel HASIL DAN PEMBAHASAN-11 Matrik F
kemudian hitung nilai V atau residu untuk mendapatkan koreksi setiap titik pada pengukuran, dengan rumus seperti ini :
Tabel HASIL DAN PEMBAHASAN-12 Matriks V
1. Perhitungan selanjutnya menghitung beda tinggi definitif dengan menggunakan rumus (2.8). Definitif ini memiliki syarat yaitu penjumlahan dari seluruh definitif hasilnya harus nol.
Rumus Definitif =Beda tinggi +Koreksi Tiap Titik
Definitif dari GD 06 ke P1 =
=
Lakukan cara yang sama hingga diketahui definitif titik P22 ke GD 06
2. Perhitungan terakhir adalah mencari elevasi titik dengan menggunakan rumus (2.9). Untuk elevasi awal diketahui 211.157220634562m Elevasi awal ini berguna untuk mencari elevasi titik selanjutnya.
Elevasi titik P1 = Elevasi Titik GD 06 + Beda Tinggi Definitif
GD 06 ke P1 =
= m
Lakukan hal yang sama sampai kembali ke elevasi awal yaitu titik GD 06
3. Limitasi Kesalahan
Pada pengukuran waterpas tertutup terdapat tingkat ketelitian yang dapat dicari dengan rumus :
Orde 1 = 2,0√ Skm= 2,0√ 0,8607 = 1,855478375 km
Orde 2 = 4.0√ Skm=4,0√ 0,8607 = 3,71095675 km
Orde 3 = 8,0 √ Skm= 8.0√ 0,8607 = 7,4219135 km
Dengan hasil koreksi sebesar 0,006 m, belum bisa masuk ke orde 3. Kemungkinan besar ini dikarenakan kesalahan pada penyusunan persamaan. Karena pada metode kondisi, berbeda dengan parameter. Pada metode kondisi kita menentukan sendiri peramaan berdasarkan loop yang kita buat. Dimana jumlah persamaan sama dengan jumlah pengamatan dikurangi jumlah pengamatan minimum.
Koreksi dari pengukuran waterpas baik kerangka utama dan kelompok disebabkan oleh adanya beberapa faktor yaitu :
a. Kesalahan pembacaan benang pada rambu ukur atau pun kasalahan pencatatan oleh petugas catat.
b. Kesalahan dari alat tersebut misalnya bak ukur yaitu kesalahan nol rambu serta kesalahan pada waterpas-nya yaitu kesalahan garis bidik.
c. Karena faktor alam. Apabila pengukuran dilakukan pada siang hari maka akan terjadi refraksi atmosfer yang mengakibatkan kesalahan pada pembacaan rambu ukur.
III.2.4 Perbandingan perhitungan Least square dengan Bowditch Pada koreksi pengukuran Least square didapatkan hasil
. Sedangkan perhitungan Bowditch didapatkan hasi pengukuran yaitu :
a. Kerangka utama kelompok dengan koreksi =
b. Loop 1 =
c. Loop 2 =
d. Loop 3 =
Dari hasil perhitungan metode tersebut, pengukuran least square lebih teliti dibandingkan dengan pengukuran dengan metode Bowditch.
III.3 Hasil Penggambaran
III.3.1 Hasil Penggambaran Poligon Utama