BAB 2
TINJAUAN PUSTAKA
2.1 Getaran
Gerak yang berulang dalam selang waktu yang sama disebut gerak periodik ini selalu dapat dinyatakan dalam fungsi sinus atau cosinus, oleh sebab itu gerak periodik ini bergerak bolak balik melalui lintasan yang sama disebut gertaran atau isolasi.
Waktu yang dibutuhkan untuk menempuh satu lintasan bolak balik disebut periode, sedangkan banyaknya getaran tiap satuan waktu disebut frekuensi. Hubungan antara periode T dan frekuensi f pernyataan ini adalah :
(1)
Satuan frekuensi dalam sistem SI adalah putaran per detik atau herz (Hz). Posisi pada saat resultan gaya yang bekerja pada partikel yang bergetar sama dengan nol disebut posisi seimbang.(A Rusli,1997)
Getaran bebas adalah sistem yang bergetar bukan karena ada gaya eksitasi (gaya penggetar), tetapi karena kondisi awal, yaitu berupa simpangan awal x(0) atau kecepatan awal v(0). Getaran bebas secara umum adalah getaran bebas tidak teredam dan getaran bebas teredam. Dalam kenyataannya getaran bebas tidak ada yangg tidak teredam.
Getaran bebas teredam adalah sistem yang berisolaso akibat diberi kondisi awal berupa simpangan awal x(0) atau kecepatan awal v(0), dimana osilasi tersebut akan mengecil amplitudonya. (Ramses Y Hutahean,2012)
2.2 Jalan Raya
Secara sederhana jalan didefenisikan sebagai jalur dimana masyarakat mempunyai hak untuk melewatinya tanpa diperlukan izin khusus untuk itu. Dengan
pernyataan ini jalan air (water way) dapat juga disebut sebagai jalan raya.
Cara pembentukan jalan yang umum adalah:
1. Berdasarkan kerelaan, pemilik tanah mengizinkan masyarakatnya melewatinya sehingga menjadi jalan
2. Pengaturan berdasarkan hukum yaitu peraturan jalan 1980
3. Peretujuan sebagai bagian dari rencana pengembangan kota berdasarkan peraturanperencanaan kota dan daerah ( Twon and country planning act) Jalan juga dapat diklasifikasikan berdasarkan kegunaannya, penting untuk dimengerti perbedaan antara jalan setapak dan troroat karena adanya peraturan khusus bagi pembuatan, pengalihan, dan lain lain pada jalan setapak yang tidak dapat ditetapkan pada trotoar. Klasifikasi jalan berdasarkan kegunaannya adalah sebagai berikut:
Jalan setapak adalah lajur dimana masyarakat dapat berjalan kaki. Lajur ini berada disamping lajur kendaraan, tetapi misalnya melalui lapangan, hutan dan sebagainya
Trotoar adalah bagian dari jalan. Lajur ini diperuntukkan untuk pejalan kaki, sehingga terpisah darikendaraan. Biasanya lajur pejalan kaki ini berada disamping kiri kanan lajur kendaraan.
Bridleway adalah jalan yang khusus diperuntukkan untuk masyarakat untuk lewat dengan berjalan kaki, berkuda atau memuntun kuda beban.
Lajur sepeda adalah lajur dari bagian jalan yang diperuntukkan bagi pengguna sepeda, bersama dengan pejalan kaki atau tanpa pejalan kaki.
Lajur kendaraan merupakan bagian dari jalan dimana masyarakat pengguna jalan dapat lewat dengan kendaraannya (bukan sepeda). Lajur kendaraan ini yang daoat mencakup trotoar dan jalan sepeda, paling banyak dimanfaatkan oleh masyarakat
2.3 Sensor
2.3.1 Defenisi Sensor
Dalam pendeteksian suatu sensor tidak akan terlepas dari istilah tranduser. Tranduser adalah sebuah alat yang bila di gerakkan oleh energi di dalam sebuah sistem transmisi menyalurkan energi dalam bentuk yang sama atau dalam bentuk yang berlainan ke sistem transmisi kedua. Transmisi energi ini bisa listrik, mekanik, kimia, optik (radiasi) atau termal (panas). Definisi tranduser yang luas mencakup alatalat yang mengubah gaya atau perpindahan mekanis menjadi sinyal elektrik.
Pada dasarnya sensor dan tranduser mempunyai definisi sama yaitu menerima rangsangan (gejala fisis) dari luar dan mengubahnya menjadi sinyal listrik. Proses fisis yang merupakan stimulus atau rangsangan sensor dapat berupa fluks magnetik, gaya, arus listrik, temperatur, cahaya, tekanan dan proses fisis lainnya. Sensor dan tranduser mempunyai perbedaan yang sangat kecil yaitu pada koefisien konversi energi. Sensor itu sendiri terdiri dari tranduser atau tanpa penguat atau pengolah sinyal yang terbentuk dalam satu indera. (Sinclair. 1988)
Berdasarkan prinsip kelistrikannya sensor dapat dikelompokkan menjadi dua yaitu sensor pasif dan sensor jenis pembangkit sendiri (self generating type). Sensor pasif menghasilkan perubahan dalam parameter listrik seperti halnya tahanan, kapasitansi dan lainlain yang dapat diukur sebagai suatu perubahan tegangan atau arus.
2.3.2 Sensor Accelerometer
terhadap waktu. Bertambahnya suatu kecepatan dalam suatu rentang waktu disebut juga percepatan (acceleration). Jika kecepatan semakin berkurang daripada kecepatan sebelumnya, disebut deceleration. Percepatan juga bergantung pada arah/orientasi karena merupakan penurunan kecepatan yang merupakan besaran vektor. Berubahnya arah pergerakan suatu benda akan menimbulkan percepatan pula. Percepatan didefinisikan sebagai perubahan kecepatan per satuan waktu. Dalam sistem MKS atau SI, satuan kecepatan adalah meter/detik2 atau m/s2. Seperti halnya pada kecepatan, kita juga mengenal percepatan rata-rata:
percepatan rata-rata = a rata-rata =
(2)
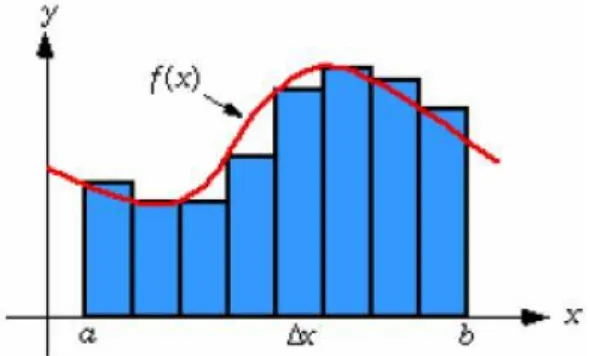
Secara grafis percepatan sesaat juga dapat didefinisikan sebagai gradien garis singgung dari kurva kecepatan (v) vs waktu (t) pada nilai t yang diinginkan. Proses penghitungan ini dipengaruhi oleh waktu cuplik data, sehingga jeda waktu cuplik data (dt) harus selalu konstan dan dibuat sekecil mungkin Secara sederhana, integral merupakan luas daerah di bawah suatu sinyal selama rentang waktu tertentu. Untuk lebih jelasnya dapat dilihat pada Gambar 2.1
Gambar 2.1 Pengintegralan sederhana terhadap suatu sinyal
Persamaan pengintegralan pada persamaan (2) masih memiliki error yang cukup besar.
Fitur dan Spesifikasi MPU-6050 yaitu;
Catu daya IC dari 2,375 V ~ 3,46 V
Antarmuka kendali dan pengumpulan data lewat protokol I2C berkecepatan tinggi (Fast Mode, 400 kHz)
Pilihan rentang skala akselerometer: ±2g (sensitivitas 16384), ±4g (8192), ±8g (4096), ±16g (2048); sensitivitas dalam LSB/g
Data keluaran MotionFusion sebanyak 6 atau 9 sumbu dalam format matriks rotasi, quaternion, sudut Euler, atau data mentah (raw data format).
Dengan digabungkannya akselerometer dan giroskop dalam satu sirkut terpadu menyebabkan pendeteksian gerakan menjadi lebih akurat (reduced settling effects and sensor drift) karena faktor kesalahan penyesuaian persilangan sumbu antara akselerometer dan giroskop dapat dihilangkan
DMP™ Engine mengambil alih komputasi rumit dari prosesor utama
sehingga sistem tidak terbebani kalkulasi yang kompleks (red: sebelum adanya IC ini, perancang rangkaian elektronika biasanya menggunakan chip PLD eksternal untuk mengerjakan komputasi semacam ini karena perhitungan matematika dalam kalkulasi gerak sangatlah kompleks dan terlalu membebani kerja mikrokontroler yang biasanya bertenaga terbatas).
Algoritma untuk menghitung bias dan kalibrasi kompas sudah terpasang dan siap digunakan, tidak perlu intervensi dari pemakai
Interupsi yang dapat diprogram untuk mendeteksi pengenal gestur (gesture recognition), pergeseran (panning), zooming, scrolling, dan shake detection
Moda siaga hemat daya hanya mengkonsumksi arus sebesar 5µA
Dapat menoleransi guncangan hingga 10000g
pada konduktor tersebut. Accelerometer yang diletakan di permukaan bumi dapat mendeteksi percepatan 1g (ukuran gravitasi bumi) pada titik vertikalnya, untuk percepatan yang dikarenakan oleh pergerakan horizontal maka accelerometer akan mengukur percepatannya secara langsung ketika bergerak secara horizontal. Hal ini sesuai dengan tipe dan jenis sensor Accelerometer yang digunakan karena setiap jenis sensor berbeda-beda sesuai dengan spesifikasi yang dikeluarkan oleh perusahaan pembuatnya. Saat ini hamper semua sensor/tranduser accelerometer sudah dalam bentuk digital (bukan dengan sistem mekanik) sehingga cara kerjanya hanya bedasarkan temperatur yang diolah secara digital dalam satu chip.
2.4 Mikrokontroler Atmega8535
Mikrokontroller sesuai namanya adalah suatu alat atau komponen pengontrol atau pengendali yang berukuran mikro atau kecil. Sebelum ada mikrokontroler, telah ada terlebih dahulu muncul mikroprosessor. Bila dibandingkan dengan mikroprosesor, mikrokontroller jauh lebih unggul karena terdapat berbagai alasan diantaranya
a. Tersedianya I/O
I/O dalam mikrokontroller sudah tersedia sementara pada mikroprosesor dibutuhkan IC tambahan untuk menangani I/O tersebut. IC I/O yang dimaksuda= adalah PPI 8255. (Syahrul,2012)
b. Memori Internal
Memori merupakan mefia untuk menyimpan program dan data sehingga mutlak harus ada. Mikroprosesoor belum memiliki memori internal sehingga memerlukan IC memori eksternal. Dengan kelebihan kelebihan di atas, ditambah dengan harganya yang relatif murah sehingga banyak pemggemar elektronika yang kemudian beralih ke mikrokontroler. Namun demikian, meski memiliki berbagai kelemahan, mikroprosesor tetap digunakan sebagi dasar dalam mempelajari mikrokontroller.
Mikrokontroller adalah otak dari suatu sistem elektronika seperti halnya mikroprosesor sebagai otak komputer. Namun, mikrokontroler memiliki nilai tambah karena didalamnya sudah terdapat memori dan sistem input/output dalam
standart memiliki arsitekrut 8-bit, dimana semua instruksi dikemas dalam kode 16-bit dan sebagian besar instruksi dieksekusi dalam satu siklus clock. Berbeda dengan instruksi MCS-51 yang membutuhkan 12 siklus clock karena memiliki arsitektur CICS (seperti komputer).(Dedi,2010)
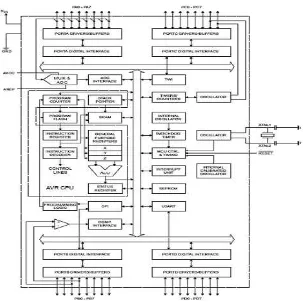
Gambar 2.5 Blok Diagram ATMega8535
Dari gambar tersebut dapat dilihat bahwa ATMega 8535 memiliki bagian sebagai berikut:
1. Saluran I/O sebanyak 32 buah, yaitu Port A,Port B, Port C, Port D 2. ADC 10 bit sebanyak 8 saluran.
3. Tiga buah Timer/Counter dengan kemampuan pembandingan 4. CPU yang terdiri atas 32 buah register
5. Watchdog Timer dengan osilator internal. 6. SRAM sebesar 512 byte.
7. Memori Flash sebesar 8 kb dengan kemampuan Read White Write 8. Unit interupsi internal dan eksternal
9. Port antarmuka SPI
11.Antarmuka komparator analog 12.Port USART untuk komukasi serial
Secara umum, AVR dapat dikelompokkan mejadi 4 kelas, yaitu keluarga ATTiny, keluarga AT90Sxx, keluarga ATMega dan AT89RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, peripheral dan fungsinya. Dari segi arsitektur dan instruksi yang digunakan, mereka bisa dikatakan hampir sama. Oleh karena itu, dipergunakan salah satu AVR produk Atmel, yaitu ATMega8535. Selain mudah didapat dan lebih murah ATMega8535 juga memiliki fasilitas yang lengkap untuk tipe AVR ada 3 jeni yaitu ATTiny, AVR klasik, dan ATMega. Perbedaannya hanya pada fasilitas dengan I/O yang tersedia serta fasilitas lain seperti ADC, EEPROM, dan lain sebaginya. Salah satu contohnya adalah ATMega8535. Memiliki teknologi RICS dengan kecepatan maksimal 16 MHz membuat ATMega 8535 lebih cepat bila dibandingkan dengan varian MCS 51. Dengan fasilitas yang lengkap tersebut menjadikan ATMega 8535 sebagai mikrokontroler yang powerfull.
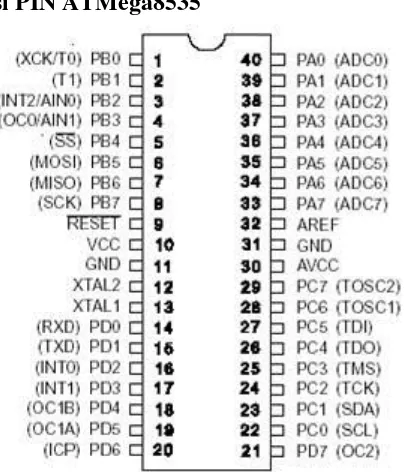
2.4.1 Konfigurasi PIN ATMega8535
Gambar 2.6 Konfigurasi Pin ATMega8535
yang masing-masingnya terdiri atas 8 pin. Pin-pin lainnya digunakan untuk keperluan rangkaian osilator, supply tegangan, reset,serta tegangan referensi untuk ADC. Untuk lebih jelasnya, konfigurasi pin atmega8535 dapat dilihat pada gambar 2.6.
Berikut ini adalah susunan pin-pin dari atmega8535:
1. VCC merupakan pin yang berfungsi sebagai pin masukan catudaya 2. GND merupakan pin Ground
3. Port A (PA0..PA7) merupakan pin I/O dua arah dan pin masukan ADC 4. Port B (PB0..PB7) merupakam pin I/O dua arah dam pin fungsi khusus, yaitu
Timer/Counter, komparator analog, dan SPI
5. Port C (PC0..PC7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog, dan Timer Osilator
6. Port D (PD0..PD7) merupakan pin I/O dua arah dan pin fungsi khusus, yaitu komparator analog, interupsi internal dan komunikasi serial USART
7. Reset merupakan pin yang digunakan untuk mereset mikrokontroller
8. XTAL1 dan XTAL2 merupakan pin masukkan clock eksternal (osilator menggunakan kriatal, biasanya dengan frekuensi 11,0592 MHz)
2.4.2 Port –Port Pada ATMega8535 dan Fungsinya
2.4.2.1Port A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit ). Output buffer Port A dapat memberi arus 20mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin menfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output selain itu, kedelaan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
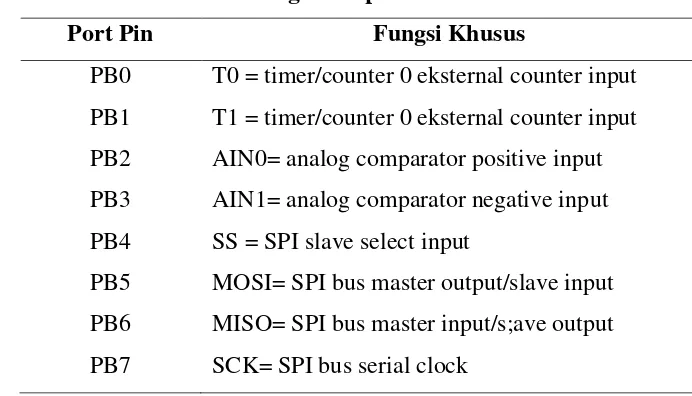
2.4.2.2Port B
Register port B (DDRB) harus di setting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Pin-pin port B juga memiliki untuk fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel berikut:
Tabel 2.1 Fungsi Pin-pin Port B
Port Pin Fungsi Khusus
PB0 T0 = timer/counter 0 eksternal counter input PB1 T1 = timer/counter 0 eksternal counter input PB2 AIN0= analog comparator positive input PB3 AIN1= analog comparator negative input PB4 SS = SPI slave select input
PB5 MOSI= SPI bus master output/slave input PB6 MISO= SPI bus master input/s;ave output PB7 SCK= SPI bus serial clock
2.4.2.3Port C
Merupakan 8-bit direction port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Directin Register port C (DDRC) harus disettimg terlebih dahulu sebelum port C digunakan. Bit-bit DDRC diisi 0 jika memfungsikan pin-pin port C yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. selain itu, dua pin pirt C (PC6 dan PC7) juga memiliki fungsi alternatif sebagai osilator untuk timer/counter.
2.4.2.4Port D
D juga memiliki untuk fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel berikut:
Tabel 2.2 Fungsi Pin-pin Port D
Port Pin Fungsi Khusus
PD0 RDX (UART input line)
PD1 TDX (UART output line)
PD2 INT0 (external 0 input)
PD3 INT1 (external 1 input)
PD4 OCIB (timer/counter 1 output conpare B match output) PD5 OCIA (timer/counter 1 output compare A match output) PD6 ICP (timer/counter1 input capture pin)
PD7 OC2 (timer/counter2 output conpare match output)
RST pada pin ( merupakan reset dari AVR. Jika pada pin ini diberi masukan low selama minimal 2 machine cycle maka sistem akan di-reset.
2.4.2.5XTAL1
XTAL1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit.
2.4.2.6XTAL2
XTAL2 adalah output dari inverting oscillator amplifier
2.4.2.7A Vcc
Avcc adalah kaki masukan tegangan bagi A/D converter. Kaki ini harus secara eksternal terhubung ke Vcc melalui lowpass filter.
2.4.2.8AREF
AREF adalah kaki masukan referensi bagi A/D converter. Untuk operationalisasi ADC, suatu level tegangan antara AGND dan Avcc harus diberi ke kaki ini.
AGND adalah kaki untuk analog ground. Hubungan kaki ini ke GND, kecuali jika broad memiliki analog ground yang terpisah.
2.4.3 Peta Memori ATMega853
ATMega8535 memiliki dua jenis memori yaitu Program Memory dan Data Memory ditambah satu fitur tambahan yaitu EEPROM memory untuk penyimpana data.(Wardhana,2006)
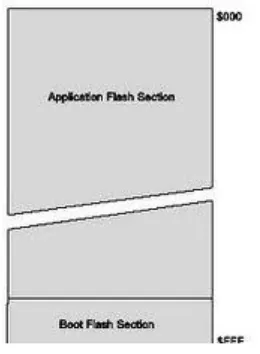
2.4.3.1Program Memory
ATMega8535 memiliki On-Chip In-System Reprogrammable Flash Memory untuk menyimpan program. Untuk alasam keamanan, program memory dibagi menjadi dua bagian, yaitu Boot Flash Section dan Application Flash Section. Boot Flash Section digunakan untuk menyimpan Program Boot Loader, yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan.
Application Flash Section digunakan untuk menyimpan program aplikasi yang dibuat user. AVR tidak dapat menjalankan program aplikasi ini sebelum menjalankan program Boot Loader. Besarnya memori Boot Flash Section dapat diprogram dari 128 word sampai 1024 word tergantung setting pada konfigurasi bit di register BOOTSZ. Jika Boot Loader diproteksi, maka program pada application flash section juga sudah aman. (Agus,2005)
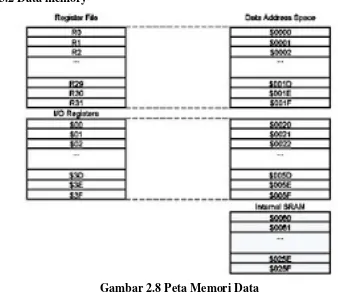
2.4.3.2Data memory
Gambar 2.8 Peta Memori Data
Gambar berikut menunjukkan peta memori SRAM pada ATMEGA8535. Terdapat 608 lokasi address data memori 96 lokasi address digunakan untuk register file dan I/O memory sementara 512 lokasi address lainnya digunakan untuk internal data SRAM. Register file terdiri dari 32 general purpose working register, I/O register terdiri dari 64 register.
2.4.3.3Status Register (SREG)
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroller.
Bit 7- I : Global Interrupt Enable
Jika bit global interrupt enabel diset, maka g=fasilitas interupsi dapat dijalankan. Bit ini akan clear ketika ada interupt yang dipicu dari hardware, setelah program interupt dieksekusi, maka bit ini harus di set kembali dengan interuksi SEI
Bit 6-T : Bit Copy Stroag
Interuksi bit copy BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit.
Bit 5-H ; Half carry flag Bit 4-S : Sign Bit
Bit S merupakan hasil exklusive or dari negative flag N dan two’s
complement overflow flag V
Bit 3- V : Two’s complement overflow flag Digunakan dalam operasi aritmatika Bit 2-N : Negative flag
Jika operasi aritmatika menghasilkan bilangan negative maka bit ini akan set Bit 1- Z : Zero Flag
Jika operasi aritmatika menghasilkan bilangan nol, maka bit ini akan set Bit 0-C : Carry Flag
Jika suatu operasi menghasilkan Carry, maka bit ini akan set.
2.4.4 Komunikasi Serial
sisi penerima. Sedangkan komunikasi data serial asinkron tidak diperlukan clock karena data dikirimkan dengan kecepatan tertentu. Baik pada pengirim maupun penerima.
2.4.4.1Komunikasi Serial pada ATMega8535
Peralatan komunikasi serial pada Atmega8535 sudah terintegrasi pada system chip. Dan masing-masing registernya baik data maupun kontrol dihubungkan dengan register input-output atau port, sebagaimana peralatan lainnya. Sehingga user (kita) cukup hanya mengaskses register-register yang berhubungan dengan serial inilah untuk mempengaruhi atau memanipu;asi peralatan tersebut. Data dikirim melalui bebrapa jalur data. Biasanya masing-masing dengan kabel tersendiri. Pada prinsipnya register-register peralatan ini hanya 5 buah. UDR, UCSRA, UCSRB, dan UBRR.
USART merupakan komunikasi yang memiliki fleksibelitas tinggi, yang dapat digunakan untuk melakukan transfer data baik antar mikrokontroller maupun dengan modul-modul eksternal termasuk PC yang memiliki fitur UART.(Wardhana,2006)
2.5 Modul Wireless
LAN nirkabel adalah suatu jaringan nirkabel yang menggunakan frekuensi radio untuk komunikasi antara perangkat komputer dan akhirnya titik akses yang merupakan dasar dari transiver radio dua arah yang tipikalnya bekerja di bandwith 2,4 GHz (802.11b, 802.11g) atau 5 GHz (802.11a). kebanyakan peralatan mempunyaai kualifikasi Wi-Fi, IEEE 802.11b atau akomodasi IEEE 802.11g dan menawarkan beberapa level keamanan seperti WEP dan atau WPA. Teknologi Wireless LAN menjadi sangat popular daat ini banyak aplikasi.Setelah evaluasi terhadap teknologi tersebut dilakukan, menjadikan para pengguna merasa puas dan meyakini realiability teknologi ini dan siap untuk digunakan dalam skala luas dan komplek pada jaringan tanpa kabel.(Mulyanta,2007)
Mobility, sistem wireless LAN bisa menyediakan user dengan informasi access yang real-time, dimana saja dalam suatu organisasi. Mobilitas semacam ini sangat mendukung produktivitas dan peningkatan kualitas pelayanan apabila dibandingkan dengan jaringan kabel.
Installation speed and simplicity, instalasi sistem wireless LAN bisa cepat dan sangat mudah dan bisa mengeliminasi kebutuhan penarikan kabel yang memalui atap atau pun tembok
Installation flexibility, teknologi wireless memungkinkan suatu jaringan untuk bisa mencapai tempat-tempat yang tidak dapat dicapai dengan jaringan kabel.
Reduced cost-of-ownership, meskipun investasi awal yang dibutuhkan oleh wireless LAN untuk membeli perangkat hardware bisa lebih tinggi daripada biaya yang dibutuhkan oleh perangkat wire LAN hardware, namun bila di perhitungkan secara keseluruhan, instalasi dan life-cycle costnya, maka secara signifikan lebih murah. Dan bila digunakan dalam lingkungan kerja yang dinamis yang sangat membutuhkan seringnya pergerakan dan perubahan yang sering maka keuntungan jangka panjanganya pada suatu wireless LAN akan jauh kebih besar bila dibandingkan dengan wired LAN. Scalability, sistem wireless LAN bisa dikonfigurasi dalam berbagai macam
topologi untuk memenuhi kebutuhan pangguna yang beragam, konfigurasi dapat dengan mudah diubah mulai dari jaringan peer-to-peer yang sesuai untuk jumlah pengguna yang kecil sampai ke full infrastructure network yang mampu melayani ribuan user dan memungkinkan roaming dalam area yang luas.
2.6 Bahasa Pemograman Mikrokontroller dengan CodeVisionAVR
penulisan program, compile, link, pembuatan kode mesin (assembler) dan download program ke chip AVR dapat dilakukan dengan CodeVision, selain itu ada fasilitas terminal, yaitu melakukan komunikasi serial dengan mikrokontroller yang sudah di program. Proses download program ke IC mikrokontroller AVR dapat mengggunakan System programmable Flash on-Chip mengizinkan memori program untuk diprogram ulang dalam sistem menggunakan hubungan serial SPI.
Salah satu keistinewaan bahasa pemograman CodeVision ini adalah memiliki library standart C dan library tertentu untuk keperluam sebagai berikut: a. Modul LDC alphanumeric
b. Bus I2C dari philips
c. Sensor suhu LM75 dari National Semiconductor
d. Real-Time Clock: PCF8563, PCF8583 dari philips, DSI 302 dan DSI307 dari maxim/dallas semiconductor
e. Protokol 1-Wire dari maxim/dallas semiconductor
f. Sensor suhu DS1820, DS18S20, dan DS18B20 dari Maxim/Dallas Semiconductor
g. Termometer/Termostat DS1621 dari Maxim/Dallas Semiconductor h. EEPROM DS2430 dan DS2433 dari Maxim/Dallas Semiconductor i. SPI
j. Power management k. Delay
l. Konversi ke Kode Gray
CodeVisionAVR juga mempunyai Automatic Program Generator bernama CodeWizardAVR, yang dapat nenpermudah programmer dalam menulis kode-kode program yang bersifat umum, antara lain:
a. Set-up akses memori eksternal b. Inisialisasi port input/output c. Inisialisasi interupsi eksternal d. Inisialisasi timer/counter e. Inisialisasi Watchdog-Timer
g. Inisialisasi perbandingan analog h. Inisialisasi ADC
i. Inisialisasi Antarmuka SPI j. Inisialisasi Antarmuka Two-Wire k. Inisialisasi Antarmuka CAN
l. Inisialisasi Bus I2C, Sensor Suhu LM375, Thermometer/Thermostat DS1621 dan Real-Time Clock PCF8563, PCF8583, DS1307, dan DS1320
m. Inisialisasi Bus 1-Wire dan Sensor Suhu DS1820, DS18S20 n. Inisialisasi modul LCD. (Setiawan,.2001)
2.7 Delphi7
Delphi adalah sebuah bahasa pemrograman dan lingkungan pengembangan perangkat lunak. Produk ini dikembangkan oleh CodeGear sebagai divisi pengembangan perangkat lunak milik Embarcadero, divisi tersebut sebelumnya adalah milik Borland. Bahasa Delphi, atau dikenal pula sebagai OBJECT PASCAL (pascal dengan ekstensi pemrograman berorientasi objek (PBO/OOP)) pada mulanya ditujukan hanya untuk Microsoft Windows, namun saat ini telah mampu digunakan untuk mengembangkan aplikasi untuk Linux dan Microsoft .NET framework. Dengan menggunakan Free Pascal yang merupakan proyek opensource, bahasa ini dapat pula digunakan untuk membuat program yang berjalan di sistem operasi Mac OS X dan Windows CE.
Delphi adalah sebuah perangkat lunak (bahasa pemrograman) untuk membuat program atau aplikasi komputer berbasis windows. Delphi merupakan bahasa pemrograman berbasis obyek, artinya semua komponen yang ada merupakan obyek – obyek. Ciri sebuah obyek adalah memiliki nama, properti, dan method / prosedur
2.7.1 Lingkungan Kerja Delphi
diperlukan untuk mendesain aplikasi, menjalankan dan menguji apakah sebuah aplikasi disajikan dengan baik untuk memudahkan pengembangan program (Madcoms, 2003). IDE Delphi terbagi menjadi enam bagian utama, yaitu Main Window, ToolBar, Component Palette, Form Designer, Code Editor, dan Object Inspector.
2.7.2 Main Window
Main window adalah bagian IDE yang mempunyai fungsi yang sama dengan semua fungsi utama dari program aplikasi Windows lainnya. Main window Delphi terbagi menjadi tiga bagian, berupa main window, toolbar dan component palette.
2.7.3 ToolBar
Delphi memiliki beberapa toolbar yang masing – masing memiliki perbedaan fungsi dan setiap tombol pada bagian toolbar berfungsi sebagai pengganti suatu menu perintah yang sering digunakan. Toolbar terletak pada bagian bawah garis menu. Pada kondisi default Delphi memiliki enam bagian toolbar, antara lain Standard, View, Debug, Desktop, Custom, dan Component Palette.
2.7.4 Component Palette
Component Palette berisi kumpulan ikon yang melambangkan komponen – komponen yang terdapat pada VCL (Visual Component Library).
2.7.5 Form Designer
Merupakan suatu objek yang dapat dipakai sebagai tempat untuk merancang program aplikasi. Form berbentuk sebuah meja kerja yang dapat diisi dengan komponen – komponen yang diambil dari Component Palette.
form mengandung unit yang berfungsi untuk mengendalikan form, yang dapat dikendalikan dengan menggunakan Object Inspector dan Code Editor
2.7.6 Code Editor
Merupakan tempat untuk menuliskan kode program dan menuliskan pernyataan – pernyataan objek Pascal. Keuntungan menggunakan delphi adalah kita tidak perlu menuliskan kode – kode sumber, karena Delphi telah menyediakan kerangka penulisan sebuah program
2.7.7 Object Inspector
Object Inspector digunakan untuk mengubah properti atau karakteristik dari sebuah komponen. Object Inspector terdiri dari dua tab, yaitu Properties dan Events.
2.7.8 Tab Properties
Digunakan untuk mengubah properti komponen.
2.7.9 Tab Events