PROPOSAL PROYEK AKHIR
RANCANG BANGUN PARALAYANG OTOMATIS
DENGAN KONTROL PID DAN GPS
Oleh :
AGUS APRIANTORO 1110121003
PROGRAM STUDI DIPLOMA 4
TEKNIK ELEKTRONIKA
DEPARTEMEN TEKNIK ELEKTRO
POLITEKNIK ELEKTRONIKA NEGERI SURABAYA
SURABAYA
A.
JUDULRancang Bangun Paralayang Otomatis dengan Kontrol PID dan GPS.
B.
LATAR BELAKANGUAV merupakan wahana udara tak berawak yang salah satu pengoperasiannya dengan cara dikendalikan dari jarak jauh. UAV dapat berupa, pesawat atau helikopter yang menggunakan sistem navigasi mandiri. Pada dasarnya pesawat, atau helikopter dapat dipertimbangkan untuk menjadi kendaraan udara yang dapat melakukan misi yang berguna dan dapat dikendalikan dari jauh atau memiliki kemampuan terbang secara otomatis [1]. Dengan definisi tersebut maka paralayang pada penelitian ini dapat dikategorikan sebagai UAV.
Untuk membuat suatu wahana udara tak berawak yang memiliki kemampuan tebang otomatis maka dibutukan suatu sistem navigasi. Salah satu sistem navigasi yang umum digunakan adalah sistem navigasi inersia atau Inertial Navigation System (INS), yaitu dengan memanfaatkan Inertial Measurement Unit (IMU). Sebuah IMU bekerja dengan mendeteksi gerakan (percepatan linier dan orientasi gerakan tersebut) dengan menggunakan kombinasi dari accelerometer dan rate-gyroscope [2]. Data yang didapat dari sensor ini selanjutnya diolah mikrokontroller untuk mengetahui attitude UAV. Untuk mendapatkan data yang baik dari IMU, dibutuhkan kalibrasi. Selain itu, karena accelerometer dipengaruhi percepatan gravitasi, maka dibutuhkan suatu koreksi gravitasi.
C.
PERNYATAAN MASALAH Rumusan Masalah1. Bagaimana memadukan sistem navigasi INS dengan sensor GPS untuk mendapatkan sistem navigasi yang lebih akurat.
2. Bagaimana mengolah data yang dihasilkan dari sistem navigasi sebagai pegendali aktuator dengan metode control PID.
3. Bagaimana meningkatkan kestabilan dari paralayang terhadap perubahan kecepatan angin.
Batasan Masalah
1. Mikrokontroller yang digunakan adalah AVR ATmega 2560.
2. Bahasa pemrograman yang digunakan adalah bahasa C dengan software Code Vision AVR.
3. Sensor Inertial Measurement Unit (IMU) yang digunakan adalah GY-80. 4. Lebar dari paragliding adalah 2.15 m dengan berat beban maksimal 2 kg. 5. Lintasan pengujian sitem navigasi hanya 2 titik koordinat.
6. Kecepatan angin sebagai gangguan dari luar sistem terhadap kestabilan UAV pada penelitian ini maksimal 2 m/s.
D.
TUJUAN DAN MANFAAT TujuanTujuan utama dari penilitian ini adalah merancang dan menerapkan sistem navigasi inersia, GPS (Global Position System) untuk membuat paralayang otomatis dengan metode kontrol PID. Mengacu pada tujuan utama maka penerapan dari penelitian ini dapat digunakan sebagai wahana udara tak berawak (UAV) alternatif untuk mengamati keadaan suatu wilayah dari udara.
Manfaat
E.
TINJAUAN PUSTAKAPada [1] dijelaskan bahwa UAV merupakan wahana udara tak berawak, baik yang dikendalikan dari dari jarak jauh atau memiliki kemampuan terbang secara otomatis.
Sedangkan pada [2] dijelaskan mengenai salah satu sistem navigasi yang umum digunakan yaitu sistem navigasi inersia atau Inertial Navigation System (INS) dengan memanfaatkan Inertial Measurement Unit (IMU).
F.
METODOLOGIa. Metode Kepustakaan
Metode ini dilakukan dengan mempelajari buku - buku panduan atau paper tentang hal - hal yang berhubungan dengan proyek yang akan dikerjakan, jenis perangkat keras, serta bentuk mekanik yang digunakan.
b. Metode Penelitian
Metode ini dilakukan dengan melakukan observasi terhadap tinjauan pustaka yang ada terkait kontrol motor servo melalui masukkan sensor IMU dan GPS yang telah diproses mikrokontroller.
c. Studi Literatur
1. Sensor Inertial Measurement Unit (IMU).
IMU (Inertial Measurement Unit) merupakan suatu unit dalam modul elektronik yang mengumpulkan data kecepatan angular dan akselerasi linear yang kemudian dikirim ke CPU (Central Processing Unit) untuk mendapatkan data keberadaan dan pergerakan suatu benda. IMU terdiri dari kombinasi accelerometer (sensor percepatan) dan gyroscope (sensor kecepatan angular). Accelerometer digunakan untuk mengukur percepatan suatu benda dan gyroscope digunakan untuk mengukur kecepatan rotasi dari suatu benda[3]. Pada penelitian ini IMU yang digunakan juga mempunyai sensor magnetometer 3 derajat kebebasan.
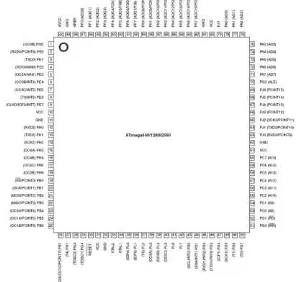
2. Mikrokontroler AVR ATmega 2560.
serial USART. Mikrokontroler ATmega 2560 dapat dioperasikan pada catuan 2,7 – 5,5 V untuk Atmega 2560L (low voltage) dengan clock speed 0 – 8 MHz dan 4,5 – 5,5 V untuk Atmega 2560 dengan clock speed 0 – 16 MHz.
Gambar 1. Konfigurasi pin ATMega2560 3. Motor Servo HS-65MG
Motor Servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas maksimum putaran sumbu (axis) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor servo.
Gambar 2. Motor Servo HS-65MG 4. XBee Pro S1
(indoor) dan 1500m (outdoor). Xbee menggunakan UART sebagai jalur komunikasi dan membutuhkan tegangan 3,3V.
Gambar 3. XBee Pro S1 5. Kontrol PID
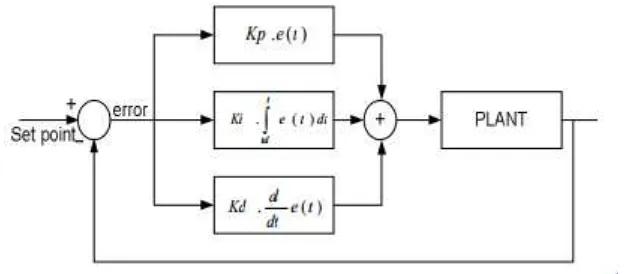
Kontrol PID merupakan kontroler proporsional ditambah integral dan derivatif (PID) adalah salah satu mekanisme umpan balik yang banyak digunakan dalam sistem pengaturan industri. Sebuah kontroler PID menghitung nilai kesalahan sebagai perbedaan antara variabel proses terukur dan set point yang diinginkan. Diagram blok kontroler PID standar disajikan pada Gambar 3.
Gambar 4. Sistem pengaturan loop tertutup dengan kontroler PID Hubungan sinyal eror dan sinyal kontrol pada kontroler tipe PID standar dapat dinyatakan sebagai berikut:
(2)
[4]. Pada penelitian ini kontrol PID diterapkan pada PID Roll, Pitch dan Yaw.
6. Global Positioning System (GPS)
Salah satu teknologi yang digunakan sekarang dalam penentuan posisi adalah Global Positioning System (GPS). GPS yang umum untuk digunakan merupakan GPS aviation yang banyak digunakan untuk kalangan sipil dan navigasi udara. Dalam diferensial GPS kesalahan yang diperoleh diinduksi dalam jangkauan ditentukan di sebuah stasiun referensi (lokasi diketahui) dan kemudian diteruskan ke stasiun (mobile) yang akurat posisi akan ditentukan. Pada penelitian ini modul GPS yang digunakan untuk memantau atau melihat lintasan terbang (trajectory) dari UAV adalah Sky Nav SKM53.
Gambar 5. SkyNav SKM53 GPS Module 7. Ground Control Station (GCS)
Ground Control Station (GCS) atau Ground Segment (GS) adalah perangkat transmitter-receiver di stasiun bumi yang dilengkapi dengan perangkat komputer yang berfungsi untuk mengendalikan dan atau memonitor wahana paralayang sedang terbang.
8. Paralayang
Gambar 6. HobbyKing® ™ Paraglider Parafoil 2.15m d. Perencanaan Sistem
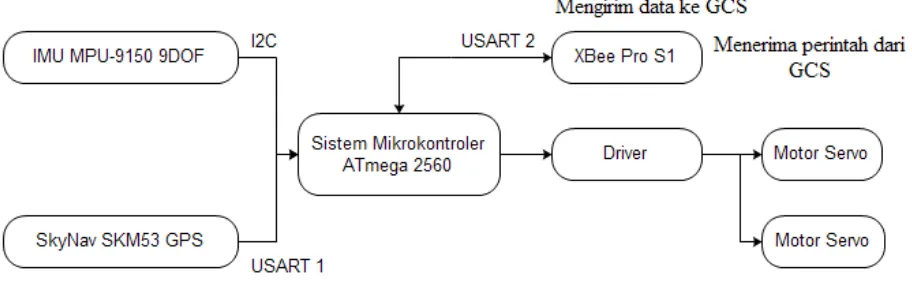
Blok diagram sistem pada paralayang adalah sebagai berikut
Gambar 7. Blok diagram sistem paralayang
Blok diagram sistem pada GCS adalah sebagai berikut
Gambar 8. Blok Diagram sistem GCS Mekanisme Kerja Sistem
GCS. Pada sistem GCS juga dilengkapi Xbee beserta USB Adapter Xbee sebagai media penerima data dan pengirim instruksi. Kemudian data akan ditampilkan pada display computer.
Pengujian dan Analisa
Adapun pengujian yang dilakukan nantinya adalah dengan mengamati keseluruhan sistem bekerja dengan optimal meliputi keakuratan data GPS, kestabilan data yang dihasilkan oleh IMU, jarak koneksi wireless dan juga control PID terhadap gangguan angin yang ada. Nantinya pengujian akan dilakukan berulang – ulang dengan tujuan untuk mendapatkan performa yang sesungguhnya dari sistem yang dibuat.
G.
JADWAL PELAKSANAANPelaksanaan Proyek Akhir diagendakan selama 12 bulan dimana kegiatan proyek akhir meliputi kegiatan persiapan, perencanaan, implementasi, dan penyusunan laporan proyek akhir dalam bentuk bar-chart berikut.
Tabel 1 Rencana Pengerjaan Proyek Akhir
KEGIATAN BULAN KE
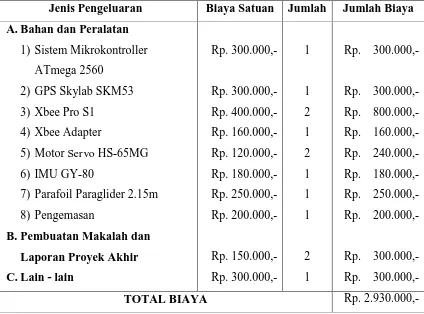
Adapun perkiraan biaya pelaksanaan PA ini dapat dilihat pada tabel berikut : Tabel 2 Anggaran Dana PA
Jenis Pengeluaran Biaya Satuan Jumlah Jumlah Biaya
A.Bahan dan Peralatan
TOTAL BIAYA Rp. 2.930.000,-
H.
DAFTAR PUSTAKA[1] Anisa Ulya Darajat, M. Komarudin, Sri Ratna, Sistem Telematri Unmanned Aerial Vehicle (UAV) berbasis Inertial Measurement Unit (IMU), September 2012, Universitas Lampung, Volume 13 .
[2] Nando Kusmanto, Rancang Bangun Sistem Navigasi Inersia dengan Kalman Filter pada Mikrokontroller AVR, Juni 2009, Universitas Indonesia.