TIGA FASE AKIBAT KETIDAKSEIMBANGAN TEGANGAN (VOLTAGE UNBALANCE)
TUGAS AKHIR
Sebagai salah satu Syarat untuk Mencapai Derajat Sarjana S-1 Program Studi Teknik Elektro Universitas Dian Nuswantoro Semarang
Disusun Oleh:
SITI KHOIROTUN NISA E11.2011.00460
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS DIAN NUSWANTORO SEMARANG
ii
iv
v
Puji syukur penulis panjatkan ke hadirat Tuhan Yang Maha Esa yang telah melimpahkan rahmat dan hidayah-Nya, sehingga penulis dapat menyusun dan menyelesaikan Laporan Tugas Akhir dengan judul “Identifikasi Karakteristik Sinyal Arus Motor Induksi Tiga Fase Akibat Ketidakseimbangan Tegangan (Voltage Unbalance)”.
Dalam penulisan laporan Tugas Akhir ini penulis banyak mendapatkan bantuan, bimbingan, dorongan, doa, saran serta kritikan dari berbagai pihak. Oleh karena itu, dengan segala hormat penulis menyampaikan terima kasih kepada :
1. Dr. Ir Edi Noersasongko, M.Kom, selaku Rektor Universitas Dian Nuswantoro Semarang.
2. Dr. Eng. Yuliman Purwanto, selaku Dekan Fakultas Teknik Universitas Dian Nuswantoro Semarang.
3. Ir. Wisnu Adi P, M.Eng, selaku Sekertaris Dekan Fakultas Teknik Universitas Dian Nuswantoro Semarang.
4. Dr. Ir. Dian Retno Sawitri, MT, selaku Kepala Program Studi dan selaku Dosen Pembimbing 1 yang telah meluangkan waktu dan pikirannya untuk memberikan bimbingan sehingga Tugas Akhir ini dapat terselesaikan.
5. Herwin Suprijono, MT, selaku Dosen Wali dan selaku Dosen Pembimbing 2 yang telah meluangkan waktu dan pikirannya untuk memberikan bimbingan sehingga Tugas Akhir ini dapat terselesaikan. 6. Dosen-dosen pengampu dan staff karyawan Fakultas Teknik
Universitas Dian Nuswantoro Semarang yang telah memberikan ilmu dan pengalamannya masing-masing, sehingga penulis dapat mengimplementasi ilmu yang telah disampaikan.
7. Kedua orang tua saya tercinta, Bapak Joko Sutikno dan Ibu Bariyatun serta kakak dan adikku mba Ika, mba Retno, mba Alim, Yulian yang selalu memberi dukungan, motivasi dan semangat.
8. Para sahabat (Mela, Umul, Pras dan Andry), serta teman-teman kos Arjuna 75 (mba Wahyu, Kinanti, Dira, Gita, Ratna, Siti, Bella, Aulia,
vi
Rumana, Dinda, Duani, Aida) yang selalu mendukung dan mendoakan saya.
Penulis menyadari bahwa Laporan Tugas Akhir ini masih jauh dari sempurna, namun penulis berharap semoga laporan Tugas Akhir ini dapat bermanfaat dan berguna bagi kemajuan Teknik Elektro Universitas Dian Nuswantoro dan menjadi referensi bagi rekan-rekan sekalian.
Semarang, November 2015
vii
PERNYATAAN ... ii
PERNYATAAN PERSETUJUAN PUBLIKASITUGAS AKHIR ... iv
KATA PENGANTAR ... v
DAFTAR ISI ... vii
DAFTAR GAMBAR ... ix DAFTAR TABEL ... xi ABSTRAK ... xii ABSTRACT ... xiii MOTTO ... xiv BAB I PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Rumusan Masalah ... 3 1.3 Tujuan Penelitian ... 3 1.4 Batasan Masalah ... 3 1.5 Manfaat Penelitian ... 4 1.6 Sistematika Penelitian ... 4
BAB II TINJAUAN PUSTAKA ... 6
2.1 Motor Induksi Tiga Fase ... 6
2.1.1 Komponen Utama ... 6
2.1.2 Prinsip kerja ... 8
2.1.3 Tegangan dan Arus ... 10
2.2 Gangguan Motor Induksi Tiga Fase ... 11
2.3 Transformasi wavelet ... 13
2.4 Transformasi fourier ... 15
viii
BAB III METODE PENELITIAN... 19
3.1 Rancangan Penelitian ... 19
3.1.1 Rancangan Alat Pengambilan Data ... 19
3.1.2 PCI & MATLAB ... 25
3.2 Langkah Pengambilan Data ... 25
3.3 Langkah Pengolahan Data ... 30
3.4 Metode Identifikasi Karakteristik ... 32
BAB IV HASIL DAN PEMBAHASAN ... 36
4.1 Kondisi Sinyal Normal dan Sinyal Gangguan ... 36
4.2 Pengolahan Sinyal ... 39
4.2.1. Analisis Transformasi Wavelet ... 39
4.2.2. Analisis Transformasi Fourier ... 41
4.3 Hasil dan Pembahasan ... 42
4.3.1. Hasil Pengolahan Wavelet ... 42
4.3.2 Hasil Pengolahan Fast Fourier Transform (FFT) ... 47
4.3.3 Penetuan Fitur ... 50
4.3.4 Hasil Ektraksi Fitur Sinyal ... 51
BAB V PENUTUP ... 54
5.1 Kesimpulan ... 54
5.2 Saran ... 54
ix
Gambar 1. 1 perkiraan “persen voltage unbalance” (PVU) ... 1
Gambar 2. 1 Bentuk Motor Induksi tiga fase ... 6
Gambar 2. 2 Bentuk Konstruksi motor induksi [9] ... 7
Gambar 2. 3 Skematik motor induksi 2 kutub [9] ... 8
Gambar 2. 4 Medan putar motor induksi 2 kutub [9] ... 9
Gambar 2. 5 Jenis gangguan pada motor induksi ... 11
Gambar 2. 6 Dekomposisi Wavelet tiga level ... 14
Gambar 2. 7 Koefisisen Dekomposisi Wavelet ... 15
Gambar 3. 1 Blok Diagram Penelitian ... 19
Gambar 3. 2 Rangkaian Peralatan Proses Akusisi data ... 20
Gambar 3. 3 Objek penelitian ... 21
Gambar 3. 4 Pin-pin PCI ... 21
Gambar 3. 5 Skema pengambilan data ... 26
Gambar 3. 6 Sensor arus ACS712 Aleggro ... 27
Gambar 3. 7 Model Simulink ... 29
Gambar 3. 8 Tampilan Konfigurasi Parameter Build ... 30
Gambar 3. 9 Langkah Pengolahan data... 31
Gambar 3. 10 Skema Pengolahan data sinyal arus ... 31
Gambar 3. 11 Identifikasi karakteristik ... 32
Gambar 4. 1 Sinyal pada kondisi normal ... 36
Gambar 4. 2 Sinyal gangguan UV 3% over voltage ... 37
Gambar 4. 3 Sinyal gangguan UV 6% over voltage ... 37
Gambar 4. 4 Sinyal gangguan UV 9% over voltage ... 37
Gambar 4. 5 Sinyal gangguan UV 3% under voltage ... 38
Gambar 4. 6 Sinyal gangguan UV 6% under voltage ... 38
Gambar 4. 7 Sinyal gangguan UV 9% under voltage ... 39
Gambar 4. 8 Sinyal approximasi transformasi wavelet ... 40
Gambar 4. 9 Sinyal detail transformasi wavelet ... 41
Gambar 4. 10 Sinyal hasil pengukuran pengolahan FFT ... 42
Gambar 4. 11 Sinyal hasil pengukuran, Approximasi 3, Detail 3 Normal ... 43
x
Gambar 4. 13 Sinyal hasil pengukuran, Approximasi 3, Detail 3 UV 6% over ... 44 Gambar 4. 14 Sinyal hasil pengukuran, Approximasi 3, Detail 3 UV 9% over ... 45 Gambar 4. 15 Sinyal hasil pengukuran, Approximasi 3, Detail 3 UV 3% under . 46 Gambar 4. 16 Sinyal hasil pengukuran , Approximasi 3, Detail 3 UV 6% under 46 Gambar 4. 17 Sinyal hasil pengukuran, Approximasi 3, Detail 3 UV 9% under . 47 Gambar 4. 18 sinyal FFT setelah diwaveletkan kondisi normal ... 48 Gambar 4. 19 Sinyal FFT setelah diwaveletkan UV 3%, 6%, 9% over voltage ... 48 Gambar 4. 20 Sinyal FFT setelah diwaveletkan UV 3%, 6%, 9% under voltage . 49 Gambar 4. 21 Ekstraksi Fitur Eigenvalue terbesar... 52 Gambar 4. 22 Diagram Pencar 3 Komponen Terbaik ... 53
xi
Tabel 3. 1 Spesifikasi Karakteristik Motor untuk Penelitian ... 20
Tabel 3. 2 Spesifikasi Analog Input PCI 1710 ... 21
Tabel 3. 3 Spesifikasi Regulator ... 22
Tabel 3. 4 Spesifikasi sensor arus ... 23
Tabel 3. 5 Variabel ketidakseimbangan tegangan... 23
Tabel 3. 6 sampel data ketidakseimbangan over voltage pada penelitian ... 24
Tabel 3. 7 sampel data ketidakseimbangan under voltage pada penelitian ... 25
Tabel 3. 8 Interface Pin Sensor ... 27
Tabel 3. 9 Jumlah data kondisi gangguan dan normal ... 28
Tabel 3. 10 Blok parameter Analog Input ... 28
Tabel 3. 11 Fitur Parameter Arus ... 35
Tabel 4. 1 fitur pada penelitian ... 50
Tabel 4. 2 Nilai fitur per Kondisi ... 51
xii
ABSTRAK
Dalam dunia industri, motor induksi tiga fase memiliki peranan yang penting dan banyak digunakan dalam proses produksi, karena itu permasalahan atau gangguan yang sering muncul hendaknya diminimalisir untuk mengurangi kerugian yang lebih besar pada Industri. Gangguan yang sering muncul pada motor induksi salah satunya yaitu ketidakseimbangan tegangan (Voltage Unbalance). Ketidakseimbangan tegangan terjadi ketika besaran tegangan berbeda dari kondisi yang seimbang, hal itu penyebab motor rusak. Penelitian dilakukan untuk dapat mengantisipasi terjadinya ketidakseimbangan tegangan dengan membuat sistem akuisisi data untuk mengetahui karakteristik Sinyal arus motor induksi tiga fase. Untuk penelitian yang dilakukan yaitu tiga jenis gangguan 3%, 6% dan 9% untuk ketidakseimbangan over voltage dan ketidakseimbangan under voltage.
Pada penelitian langkah identifikasi karakteristik ada 3 tahap yaitu: pengolahan data, penentuan fitur dan ektraksi fitur. Proses pengolahan data menggunakan transformasi wavelet dan Fast Fourier Transform (FFT), proses penetuan fitur menggunakan statistic dan proses ekstraksi fitur menggunakan metode principle component analysis (PCA). Gangguan ketidakseimbangan tegangan dengan presentase kecil menghasilkan ketidakseimbangan arus dengan presentase yang lebih besar. Untuk karakteristik harmonisa FFT didapatkan sinyal normal dikenali sampai harmonis ke-2 dan sinyal gangguan dikenali sampai sinyal harmonisa ke-3. Dan untuk karakteristik gangguan ketidakseimbangan tegangan dapat dianalisa dengan 8 fitur yang cocok untuk mewakili data gangguan ketidakseimbangan tegangan dari 19 fitur yang telah dibuat. Sedangkan 11 fitur yang mendekati nol dan di bawah nol dibuang karena terlalu kecil untuk dijadikan karakteristik.
Kata Kunci: Motor Induksi 3 Fase, Akuisisi Data, Sinyal Arus, Ketidakseimbangan Tegangan.
xiii
In the industrial world, three-phase induction motor has an important role and it used in the production process, therefore the problem or interference that appears should be minimized to reduce the damage in the Industry. One of problem that often appears on induction motor is voltage unbalance. Voltage unbalance occurs when the amount of voltage is different from a balanced condition, it is cause the faulty motor. This research is conducted to anticipate the voltage unbalance by creating in the acquisition data system to determine the characteristics of the flowing signal of three-phase induction motor. The research that is conducted consists of three types of the interference, they are 3%, 6% and 9% for the unbalance over voltage and unbalance under voltage.
The characteristic identification step in the research there are 3 stages: data processing, determination of features and feature extraction. The processing of data use wavelet transform and Fast Fourier Transform (FFT), determination process use statistical features, and process of feature extraction use principle component analysis (PCA). The voltage unbalance interference with small percentage generates flowing unbalance with the larger percentage. The harmonic characteristics FFT is obtained for normal signals recognized until the 2nd harmonic and interference signal recognized to the 3rd harmonic signal. The characteristics of voltage unbalance problem can be analyzed exactly by 8 features to represent the data of unbalance interference voltage from 19 features that have been made. Whereas 11 features close to zero and less are zero discarded because it is too small to be used as the characteristic.
Keywords: 3-phase Induction Motor, Data Acquisition, Flowing Signal, Voltage Unbalance.
xiv
MOTTO
Jangan berputus asa jika menghadapi kesulitan, karena setiap tetes air hujan yang jernih berasal daripada awan yang gelap.
Sahabat adalah mereka yang tahu semua kekuranganmu, namun tetap memilih bersamamu ketika orang lain pergi meninggalkanmu.
Segera laksanakan rencana keberhasilanmu di hari ini, jangan tunda lagi, jangan buang waktu, karena waktu tidak bisa menunggu.
Kebahagiaan yang diukur dengan harta melimpah bukan lah sesuatu yang salah. Namun berucap syukur atas segala yang Allah beri adalah kebahagiaan sejati.
1
BAB I PENDAHULUAN 1.1 Latar Belakang
Motor induksi memiliki peran yang sangat penting dan paling banyak digunakan dalam kegiatan industri, untuk mengkonversi energi listrik menjadi energi gerak. Hal itu dikarenakan motor induksi memiliki beberapa keuntungan yang tidak dimiliki motor DC [1], akan tetapi motor induksi juga sering mengalami gangguan yang dapat dikategorikan ke dalam gangguan internal dan eksternal. Faktor internal disebabkan karena gangguan mekanik dan elektrik sedangkan faktor eksternal disebabkan oleh gangguan mekanik, elektrik dan lingkungan [2]. Untuk mengurangi adanya gangguan tersebut perlu dilakukan deteksi adanya gangguan pada motor induksi melalui proses monitoring untuk menghindari kerugian yang lebih besar. Pada penelitian ini difokuskan pada gangguan eksternal elektrik yaitu voltage unbalance.
Tegangan tidak seimbang merupakan salah satu gangguan yang paling sering terjadi di sistem listrik. Penyebab utama ketidakseimbangan tegangan dalam sistem tenaga adalah distribusi yang tidak merata dari beban fase tunggal. Ada juga penyebab tambahan lainnya seperti bank transformator tidak seimbang, gangguan sistem tenaga, dan lain lain. Laporan The American National Standards Institute menunjukkan bahwa 98% dari pelanggan utilitas memiliki kurang dari 3% unbalance, sedangkan 66% memiliki kurang dari 1% (Gambar 1.1), dan bahwa tidak ada hubungan antara ketidakseimbangan dan beban [3].
Gambar 1. 1 perkiraan “persen voltage unbalance” (PVU)
2
Selain motor induksi, yang tidak kalah penting dalam dunia industri yaitu sistem pemantauan kondisi motor untuk peningkatan kinerja dan produktifitas motor. Oleh karena itu, dibutuhkan suatu perangkat yang dapat menyelesaikan masalah tersebut, salah satunya adalah sistem yang disebut dengan sistem akuisisi data yang dapat memproses data secara cepat, realtime dan akurat sehingga data siap untuk di olah lebih lanjut. Sistem akuisisi data dapat didefinisikan sebagai suatu sistem untuk mengambil, mengumpulkan dan menyimpan data hingga memprosesnya untuk menghasilkan data yang dikehendaki jenis serta metode yang dipilih pada umumnya bertujuan untuk menyederhanakan setiap langkah yang dilaksanakan pada keseluruhan proses [4].
Penelitian terdahulu yang berkaitan dengan judul yang penulis angkat yaitu tentang, kualitas parameter motor induksi tiga fase yang di akibatkan perlakuan tegangan sumber masukan yang bervariasi [5], yang menunjukkan bahwa sumber masukan tegangan yang tidak seimbang akan berpengaruh pada kualitas motor induksi tiga fase. Investigasi kinerja 3 fase mesin asynchronous di bawah tegangan ketidakseimbangan [6], yang menunjukan bahwa kondisi motor keadaan normal dengan unbalance voltage berpengaruh pada putaran motor . Motor induksi tiga fase torsi letidakseimbangan tegangan di bawah normal [7] yang menunjukan bahwa kondisi motor pada putaran normal dan ketidakseimbangan tegangan berdasarkan standart perhitungan ketidakseimbangan tegangan .
Pada penelitian ini dalam proses pengambilan data menggunakan sensor arus untuk membaca arus yang mengalir pada motor, untuk mengetahui adanya gangguan voltage unbalance pada motor induksi. Permasalahan ketidakseimbangan tegangan yang menyuplai motor induksi tiga fase adalah hal yang dapat terjadi saat pengoperasian motor induksi tersebut. Oleh karena itu perlu dilakukannya deteksi dini melalui proses monitoring untuk menghindari kerugian yang lebih besar. Untuk mendeteksi adanya gangguan voltage unbalance pada motor induksi dibutuhkan parameter dan metode untuk identifikasi yang akurat. Parameter yang digunakan dalam penelitian ini adalah arus dan metode yang digunakan adalah wavelet dan fast fourier transform (FFT) dan principle
analysis component (PCA). Dengan mengetahui identifikasi karakteristik Sinyal arus motor induksi tiga fase diharapkan mampu mengenali karakteristik motor ketika terjadi gangguan khususnya pada voltage unbalance sehingga dapat mengurangi kerusakan motor dan memperpanjang usia motor.
Dipilihnya parameter arus pada penelitian yaitu karena pengukuran arus lebih mudah dibandingkan mengukur tegangan. Pengukuran arus dalam industri dapat dengan menggunakan tang arus yang langsung di capitkan pada kabel untuk mengetahui aliran arus pada kabel tersebut dengan satu tangan. Sedangkan untuk mengukur tegangan lebih rumit yaitu diperlukan alat ukur voltmeter atau multimeter yang harus langsung terhubung pada sumber tegangan positif dan negatif dengan menggunakan 2 tangan. Untuk itu pada penelitian memilih mengidentifikasi karakteristik gangguan motor induksi 3 fase dengan Sinyal arus akibat ketidakseimbangan tegangan.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang telah diuraikan di atas, maka didapatkan rumusan masalah pada laporan tugas akhir ini, yaitu:
1. Bagaimana merancang sistem akuisisi data arus listrik motor induksi tiga fase dengan parameter gangguan ketidakseimbangan tegangan (voltage ubalance) ?
2. Bagaimana karakteristik efek voltage unbalance berdasarkan Sinyal arus?
1.3 Tujuan Penelitian
Hal-hal yang menjadi tujuan penulisan tugas akhir ini yaitu:
1. Membuat sistem rancang bangun akuisisi data gangguan arus listrik motor induksi tiga fase dengan gangguan voltage unbalance.
2. Mengetahui karakteristik Sinyal arus motor induksi akibat voltage unbalance.
1.4 Batasan Masalah
Untuk menghindari pembahasan yang meluas maka penulis akan membatasi pembahasan tugas akhir ini dengan hal-hal sebagai berikut:
4
1) Motor induksi yang digunakan dalam penelitian adalah motor induksi tiga fase.
2) Penelitian difokuskan pada akuisisi data arus listrik untuk gangguan ketidakseimbangan tegangan (voltage unbalance).
3) Metode analisis dalam penelitian ini adalah menggunakan wavelet, Fast Fourier Transform (FFT) dan ekstraksi fitur menggunakan principle component analysis (PCA).
4) Sistem yang di gunakan dalam pengambilan data pada penelitian ini yaitu PCI 1710.
5) Sensor arus yang digunakan dalam penelitian ini adalah sensor arus “ACS712 Aleggro”.
1.5 Manfaat Penelitian
Manfaat yang dapat diperoleh dari tugas akhir ini adalah sebagai berikut : 1. Mengetahui karakteristik Sinyal arus akibat adanya gangguan
ketidakseimbangan tegangan.
2. Menyediakan data karakteristik arus untuk dianalisa lebih lanjut dalam penanganan gangguan pada motor induksi 3 fase.
1.6 Sistematika Penelitian
Sistematika yang digunakan dalam laporan Tugas Akhir ini adalah sebagai berikut:
BAB I : PENDAHULUAN
Bab ini berisi tentang latar belakang, perumusan masalah, tujuan penelitian, batasan masalah, manfaat penelitian dan sistematika penulisan laporan.
BAB II : TINJAUAN PUSTAKA
Bab ini berisi tentang teori – teori yang diberkaitan dalam penelitian ini.
Berisi tentang perancangan hardware dan software yang digunakan dalam penelitian, baik dari keseluruhan sistem maupun masing-masing bagian sistem.
BAB IV : HASIL DAN PEMBAHASAN
Berisi tentang hasil perancangan alat dan pengujian dari tiap bagian dan keseluruhan sistem yang digunakan.
BAB V : PENUTUP
Berisi kesimpulan dan saran yang berkaitan dengan seluruh proses perancangan dan pembuatan tugas akhir ini serta penyelesaian laporannya.
6
BAB II
TINJAUAN PUSTAKA
2.1 Motor Induksi Tiga Fase
Motor induksi merupakan motor arus bolak-balik (AC) yang paling luas digunakan, yang terdiri dari 2 bagian penting yaitu stator bagian diam dan rotor bagian yang berputar. Arus rotor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan antara putaran rotor dengan medan putar yang dihasilkan oleh arus stator. Motor induksi 3 fase merupakan mesin arus bolak balik yang paling umum digunakan di industri-industri. Medan putar (fluks yang berputar) yang dihasilkan dalam kumparan statornya. Medan putar ini terjadi apabila kumparan stator dihubungkan ke tegangan fase banyak umumnya tiga fase, dengan beda fase masing-masing 120° [8]. Bentuk Gambaran motor induksi tiga fase diperlihatkan pada Gambar 2.1.
Gambar 2. 1 Bentuk Motor Induksi tiga fase
2.1.1 Komponen Utama
Bagian stator bagian yang diam terdapat beberapa slot yang merupakan tempat kawat (konduktor) dari tiga kumparan tiga fase yang disebut kumparan stator. Jika kumparan stator mendapatkan suplai arus tiga fase maka timbul fluks magnet putar. Sebesar N_S = (120. f)/p. bagian rotor merupakan tempat kumparan rotor adalah bagian yang bergerak atau berputar. Ada dua jenis kumparan rotor
sangkar sangkar tupai (squirrel cage rotor) dan rotor belitan (phase wound rotor). Hampir 90% kumparan rotor dari motor induksi menggunakan jenis squirrel cage rotor.
Motor induksi tiga fase terdiri atas dua komponen utama yaitu bagian yang diam dan bagian yang berputar yang disebut rotor. Antara rotor dan stator dipisahkan oleh celah udara (air gap) yang kecil yang jaraknya antara 0,4 mm sampai dengan 4 mm, tergantung daya output motor. Berikut ditunjukan bentuk konstruksi dari motor induksi pada Gambar 2.2.
Gambar 2. 2 Bentuk Konstruksi motor induksi [9]
Stator terdiri atas rangka/bingkai baja yang berlubang, inti besi silinder yang dibuat berlaminasi dan sejumlah slot yang dibuat untuk menampung belitan stator. Secara mekanis rangka menyangga rotor stator dan bearing. Belitan stator terdiri atas belitan-belitan yang terbagi tiga secara seimbang yang terdistribusi dalam slot stator dan dihubungkan dengan sumber tegangan. Energi untuk rotor dihantarkan secara induksi oleh rotasi sinkron dari medan magnetik stator. Oleh sebab itu disebut motor induksi.
Rotor juga dibuat berlaminasi dan mempunyai sejumlah slot untuk menampung belitan rotor. Berdasarkan jenis belitan rotor, ada dua jenis motor
8
induksi tiga fase yaitu sangkar bajing (squirrel-cage) atau sering disebut rotor sangkar dan motor belit (wound-rotor).
Rotor sangkar terdiri dari batang konduktor yang dimasukkan pada slot-slot rotor dan ujungnya dihubungkan oleh cincin sehingga berupa rangkaian tertutup. Konstruksi antara batang konduktor dan cincin membentuk sebuah sangkar sehingga disebut rotor sangkar. Batang konduktor diselubungi dengan inti besi yang berlaminasi yang mengkonsentrasikan fluks magnetic dari stator ke rotor. Laminasi ini juga menyangga poros rotor. Sedang bearing (bantalan) pada kedua sisi poros rotor berfungsi agar rotor dapat berputar bebas didalam stator.
Rotor belit mempunyai belitan tiga fase seperti pada stator. Belitan dimasukkan dalam slot rotor dan dihubungkan bintang. Terminal dihubungkan pada slip-ring yang ikut berputar bersama rotor. Slip-ring ini dihubungkan dengan sikat dan dihubungkan keluar sehingga bisa diseri dengan tahanan luar untuk start-up, ataupun operasi normal. Sikat ini juga dihubungkan singkat.[9]
2.1.2 Prinsip kerja
Prinsip kerja dari motor induksi berdasarkan prinsip medan putar. Stator terdiri atas tiga belitan yang secara elektris berbeda sudut fase sebesar 120º yang ditunjukan pada Gambar 2.3. Ketiga belitan ini dihubungkan pada sumber tegangan 3 fase.
Ketika arus I melalui belitan, arus ini menginduksi medan magnet dengan dua kutub (utara dan selatan). Medan magnet yang berbentuk H sebanding dengan arus I. Medan magnet H memiliki karakteristik distribusi sinusoidal spatial dan polaritasnya terbalik setiap setengah periode dari 180º elektris. Sehingga ketiga medan Ha, Hb, Hc terbentuk ketika arus Ia, Ib, Ic melewati belitan stator. Pergeseran fase 120º elektris dari arus stator menghasilkan 120º elektris pada ketiga medan magnet Ha, Hb, Hc. Medan magnet ini melalui rotor dan laminasi stator. Medan magnet resultan pada tiap waktu adalah sama dengan penjumlahan medan magnet Ha, Hb, Hc pada waktu tertentu. Medan magnet putar resultan ditunjukan pada Gambar 2.4. [9].
Gambar 2. 4 Medan putar motor induksi 2 kutub [9]
Pada waktu I arus 3 fase stator menghasilkan medan magnet maksimum HA karena nilai puncak dari arus A, dan medan magnet HB dan HC dengan amplitudo sama dengan setengah dari nilai maksimum. Resultan medan magnet dari waktu
10
ini mempunyai arah HA. Demikian juga untuk waktu 2,3,4,5,6, menghasilkan medan putar sinkron dengan amplitudo yang konstan. Medan putar ini diinduksikan ke rotor meghasilkan arus pada rotor bar. Arus rotor ini menghasilkan medan magnet dengan polaritas yang berlawanan dengan medan stator. Karena kutub berlawanan akan tarik menarik, rotor mengikuti medan putar stator menghasilkan putaran yang lebih rendah dari medan putar stator. Perbedaan dari putaran medan putar stator dan rotor disebut slip. Untuk menghasilkan arus motor yang diperlukan karena tahanan yang kecil dari rotor bar. Sehingga rotor menghasilkan torsi yang sebanding dengan arus stator dan rotor.
2.1.3 Tegangan dan Arus
Motor induksi disuplai oleh sistem 3 fase di mana tegangan ketiga fase tersebut berada sebesar 120º atau 2π/3 radian.
Va(t) = √2Vm cos(t + α) Vb(t) = √2Vm cos(t + α - 2𝜋 3 ) (2.1) Vc(t) = √2Vm cos(t + α + 2𝜋 3 )
di mana Va adalah tegangan fase A, Vb adalah tegangan fase B dan Vc adalah Tegangan fase C, Vm adalah nilai puncak dari masing-masing fase, ω adalah frekuensi elektrik fundamental (rad/s). karena perbedaan fase simetris maka penjumlahan ketiga fase adalah nol,
Ia + Ib + Ic = 0 (2.2)
Untuk arus motor induksi juga berbeda fase 120º: Ia0(t) = √2 Im cos (t) Ib0(t) = √2 Im cos (t - 2𝜋 3 ) (2.3) Ic0(t) = √2 Im cos (t + 2𝜋 3 )
Di mana Ia, Ib, Ic adalah arus di fase A, B, C, Im adalah nilai puncak dari frekuensi fundamental dari masing arus fase, adalah frekuensi elektrik
fundamental (rad/s). ϕ adalah faktor daya lagging, dan t adalah waktu (s). Karena pergeseran fase yang simetris 120º penjumlahan ketiga fase adalah nol.
Ia + Ib + Ic = 0 (2.4)
2.2 Gangguan Motor Induksi Tiga Fase
Gangguan motor induksi dapat dikategorikan ke dalam gangguan internal dan eksternal. Faktor internal disebabkan karena gangguan mekanik dan elektrik sedangkan faktor eksternal disebabkan oleh gangguan mekanik, elektrik dan lingkungan [2]. Gangguan motor induksi ditunjukkankan pada Gambar 2.5.
Gambar 2. 5 Jenis gangguan pada motor induksi
Gangguan yang akan dibahas pada penelitian ini khusus pada faktor eksternal yaitu gangguan elektrik unbalance voltage. Gangguan yang sering terjadi pada
Sources of machine Faults
Internal External
Mechanical Electrical Electrical Environmental Mechanical
Rotor strikes Bearing faults Coil & Lamination movement Eccentricity Diselectric failure Rotor bars crack Magnetic circuit faults Transient voltage Voltage fluctuations Unbalanced voltage
Humidity Over load
Poor mounting Pulsating load Temperatur Cleanlines s
12
motor induksi tiga fase salah satunya adalah unbalance voltage. Gangguan ini mempunyai dampak yang sangat berbahaya bila dibiarkan berlarut-larut dikarenakan arus yang mengalir sangat besar sehingga meningkatkan suhu dan dapat mengakibatkan motor induksi tiga fase terbakar [1]. Dalam sistem tiga fase, ketidakseimbangan tegangan terjadi ketika besaran fase atau jalur tegangan yang berbeda dan sudut fase berbeda dari kondisi yang seimbang, atau keduanya [10].
Ada tiga definisi ketidakseimbangan tegangan yaitu Definisi NEMA (National Association Equipment Produsen) adalah ketidakseimbangan tegangan, dikenal sebagai line voltage unbalance rate (LVUR), didefinisikan sebagai :
%LVUR = max 𝑣𝑜𝑙𝑡𝑎𝑔𝑒 𝑑𝑒𝑣𝑖𝑎𝑡𝑖𝑜𝑛 𝑓𝑟𝑜𝑚 𝑡ℎ𝑒 𝑎𝑣𝑔 𝑙𝑖𝑛𝑒 𝑣𝑜𝑙𝑡𝑎𝑔𝑒
𝑎𝑣𝑔 𝑙𝑖𝑛𝑒 𝑣𝑜𝑙𝑡𝑎𝑔𝑒 . 100 (2.4)
Definisi IEEE adalah ketidakseimbangan tegangan, dikenal sebagai phase voltage unbalance rate (PVUR), didefinisikan sebagai :
%PVUR = max 𝑣𝑜𝑙𝑡𝑎𝑔𝑒 𝑑𝑒𝑣𝑖𝑎𝑡𝑖𝑜𝑛 𝑓𝑟𝑜𝑚 𝑡ℎ𝑒 𝑎𝑣𝑔 𝑝ℎ𝑎𝑠𝑒 𝑣𝑜𝑙𝑡𝑎𝑔𝑒
𝑎𝑣𝑔 𝑝ℎ𝑎𝑠𝑒 𝑣𝑜𝑙𝑡𝑎𝑔𝑒 . 100 (2.5)
IEEE definisi mirip dengan definisi NEMA. Perbedaannya adalah bahwa IEEE tegangan menggunakan fase dan NEMA menggunakan informasi tentang tegangan line-to-line. Informasi tentang fase tidak muncul pada kedua persamaan. Definisi sebenarnya: Ketidakseimbangan tegangan didefinisikan sebagai rasio tegangan urutan negatif dengan tegangan urutan positif. Nilai didefinisikan sebagai persentase faktor ketidakseimbangan tegangan atau voltage unbalance factor (VUF). Didefinisikan sebagai :
%VUF = 𝑛𝑒𝑔𝑎𝑡𝑖𝑣𝑒 𝑠𝑞𝑢𝑒𝑛𝑐𝑒 𝑣𝑜𝑙𝑡𝑎𝑔𝑒 𝑐𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡
𝑝𝑜𝑠𝑜𝑡𝑖𝑓 𝑠𝑒𝑞𝑢𝑒𝑛𝑐𝑒 𝑐𝑜𝑚𝑝𝑜𝑛𝑒𝑛𝑡 . 100 (2.6)
Komponen tegangan urutan positif dan negatif diperoleh dengan memecahkan tiga fase tegangan garis seimbang VAB, VBC, dan VCA (atau fase tegangan) menjadi dua komponen simetris Vp dan Vn (dari garis atau fase tegangan). Dua komponen yang seimbang didefinisikan sebagai :
Vp = 𝑉𝑎𝑏 + 𝑎 . 𝑉𝑏𝑐 + 𝑎² . 𝑉𝑐𝑎 3 Vn = 𝑉𝑎𝑏 + 𝑎² . 𝑉𝑏𝑐 + 𝑎 .𝑉𝑐𝑎 3 (2.7) Di mana α = 1˂120° dan α2 = 1˂240°
Tegangan urutan positif dan negatif dapat digunakan ketika menganalisis perilaku motor induksi dalam kondisi tidak seimbang. Karena definisi yang benar melibatkan kedua besarnya dan sudut (aljabar kompleks) ketika menghitung komponen tegangan urutan positif dan negatif, formula yang diberikan menghindari penggunaan aljabar kompleks tetapi memberikan pendekatan yang baik dengan definisi yang benar.
% voltage unbalance = 82 .√𝑣² 𝑎𝑏𝑒 + 𝑣² 𝑏𝑐𝑒 + 𝑣²𝑐𝑎𝑒
𝑎𝑣𝑔 𝑙𝑖𝑛𝑒 𝑣𝑜𝑙𝑡𝑎𝑔𝑒 (2.8)
Di mana Vabc = berbeda antara line voltage Vab dan average line voltage [6]. Ketidakseimbangan tegangan pada motor induksi dengan presentase yang kecil menghasilkan presentase ketidakseimbangan arus yang lebih besar. Akibatnya temperature akan naik dan presentase ketidakseimbnagan tegangan akan lebih besar untuk motor yang sedang beroperasi dibandingkan kondisi yang sama pada saat tegangan seimbang. Secara umum efek ketidakseimbangan tegangan pada motor induksi menurut NEMA, ekuivalen dengan yang terjadi pada tegangan dengan urutan negative yaitu terjadinya putaran yang berlawanan dengan yang terjadi pada tegangan seimbang. Tegangan negative akan menghasilkan celah udara pada perputaran fluksi yang berlawanan dengan rotasi rotor, hal ini cenderung menghasilkan arus yang tinggi. Tegangan urutan negative yang kecil dapat menghasilkan arus yang lebih besar pada lilitan dibandingkan jika kondisinya seimbang [11].
2.3 Transformasi wavelet
Wavelet adalah fungsi matematika yang membagi data kedalam komponen-komponen frekuensi yang berbeda, dan kemudian setiap komponen-komponen dipelajari
14
dengan suatu resolusi yang sesuai dengan skalanya. Wavelet dapat digunakan untuk memisahkan sinyal asli dengan sinyal derau. Wavelet mendekomposisikan sebuah himpunan data untuk menghasilkan sinyal detail. Sebuah nilai ambang tertentu digunakan untuk membangkitkan koefisien yang menggunakan transformasi wavelet invers untuk merekonstruksi himpunan data. Metode ini menghsilkan sinyal yang bersih [12]. Koefisien sinyal detail (Dj) dan sinyal aproksimasi (Aj) didekomposisikan dari wavelet orthogonal [13] yang berisi fungsi skala dan fungsi wavelet. Fungsi skala diasosiasikan dengan low-pass filters dan fungsi wavelet diasosiasikan dengan high-pass filters. Pemakaian skala yaitu untuk menganalisa dan menampilkan sinyal serta menjadi peran yang penting dalam analisa sinyal. Apabila menganalisa suatu sinyal dengan data yang besar, maka akan diperoleh Gambaran yang kurang jelas mengenai sinyal tersebut. Dan apabila data kecil yang dianalisa maka akan diperoleh Gambaran yang melebar dari sinyal tersebut. Dengan menggunakan analisis wavelet maka akan diperoleh kedua Gambaran di atas yaitu sinyal approximasi atau sinyal benar dan sinyal detail atau sinyal derau. Hal ini yang menjadikan wavelet dipilih dalam pengolahan data pada penelitian ini. Berikut tampilan Skema dekomposisi wavelet ditunjukan pada Gambar 2.6.
Gambar 2. 6 Dekomposisi Wavelet tiga level
Beberapa sifat penting low pass filter dan high pass filter adalah sebagai berikut: 1. ∑𝑛ℎ(𝑛)2 = 1 dan ∑𝑛𝑔(𝑛)2 = 1 (2.9) 2. ∑𝑛ℎ(𝑛) = √2 dan ∑ 𝑔(𝑛) =𝑛 0 (2.10) g(n) h(n) h(n) g(n) 2 2 2 2 cA1(k) cD1(k) cA2(k) cD2(k) x(t) h(n) g(n) cA3(k) cD3(k)
3. Filter g(n) adalah alternatif dari filter h(n), yang merupakan sebuah integer ganjil N sehingga:
G(n) = (-1)n h( N-n ) (2.11)
Berdasarkan implementasi dari Gambar 2.7 hubungan dari koefisien aproksimasi dan koefisien detail diantara dua level ditentukan sebagai:
cAj (k) = ∑𝑛ℎ(2𝑘 − 𝑛) 𝑐𝐴j-1(n) (2.12)
cDj (k) = ∑𝑛𝑔(2𝑘 − 𝑛) 𝑐𝐴j-1(n) (2.13)
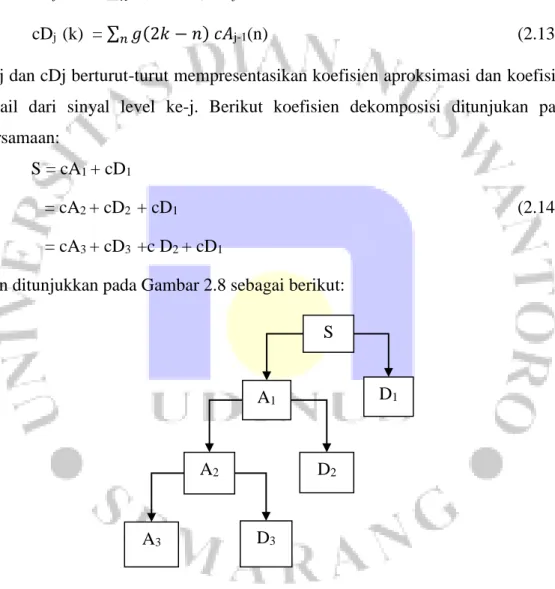
cAj dan cDj berturut-turut mempresentasikan koefisien aproksimasi dan koefisien detail dari sinyal level ke-j. Berikut koefisien dekomposisi ditunjukan pada persamaan:
S = cA1 + cD1
= cA2 + cD2 + cD1 (2.14)
= cA3 + cD3 +c D2 + cD1
Dan ditunjukkan pada Gambar 2.8 sebagai berikut:
Gambar 2. 7 Koefisisen Dekomposisi Wavelet
2.4 Transformasi fourier
Discrete Fourier Transform (DFT) digunakan untuk menghitung Sinyal frekuensi sinyal pada komputer digital. DFT ditunjukkan dalam Persamaan 2.15 berikut.
S
A1 D1
A2 D2
16
H (k) = ∑𝑁−1𝑛=0h(n)e−j2πnk/N untuk 0 < k < (N -1) (2.15)
dengan h(n) adalah runtun masukan diskret dan H(k) merupakan magnitude frekuensi serta N merupakan jumlah runtun masukan diskret.
Inverse Discrete Fourier Transform (IDFT) ditentukan dengan cara menghitung runtun waktu diskret h(n) dari runtun frekuensi diskret H(k).
h (n) = 1
𝑁 ∑ H(k)e j2πnk/N 𝑁−1
𝑛=0 untuk 0 < k < (N -1) (2.16)
Fast Fourie Transform (FFT) merupakan prosedur penghitungan DFT yang efisien sehingga akan mempercepat proses penghitungan DFT Bila diterapkan pada kawasan waktu maka algoritma ini disebut juga sebagai FFT penipisan dalam waktu atau decimation-in-time (DIT). Penipisan kemudian mengarah pada pengurangan yangsignifikan dalam sejumlah perhitungan yang dilakukan pada datakawasan waktu. Persamaan 2.15 menjadi:
H1(k) = ∑ h(n)𝑊𝑁𝑛𝑘 𝑁−1
𝑛=0 untuk 0 ≤ k ≤ (N -1) (2.17) Di mana faktor 𝑒−𝑗2𝜋/𝑁 akan ditulis sebagai,
WN = 𝑒−𝑗2𝜋/𝑁 = cos(2𝜋/𝑁) – j sin (2𝜋/𝑁) (2.18)
Akhiran n pada Persamaan 2.17 diperluas dari n=0 sampai dengan n=N-1, bersesuaian dengan nilai data h(0), h(1), h(2), h(3)...h(N-1). Runtun bernomor genap adalah h(0), h(2), h(4)....h(N-2) dan runtun bernomor ganjil adalah h(1), h(3)....h(N-1). Kedua runtun berisi N/2-titik. Runtun genap dapat ditandakan h(2n) dengan n=0 sampai n=N/2-1, sedangkan runtun ganjil menjadi h(2n-1). Kemudian Persamaan 2.17 dapat ditulis ulang menjadi.
H1(k) = ∑ h(2n)𝑊𝑁2𝑛𝑘 𝑁/2−1 𝑛=0 + ∑ h(2n + 1)𝑊𝑁 2(2𝑛+1)𝑘 𝑁/2−1 𝑛=0 (2.19) = ∑𝑁/2−1𝑛=0 h(2n)𝑊𝑁2𝑛𝑘 + 𝑊𝑁𝑘 ∑ h(2n + 1)𝑊𝑁/22𝑛𝑘 𝑁/2−1 𝑛=0 , 0 ≤ k ≤ (N -1)
Selanjutnya dengan menggantikan 𝑊𝑁2𝑛𝑘 = 𝑊𝑁/2𝑛𝑘 maka persamaan 2.19 menjadi :
H1(k) = ∑ h(2n)𝑊𝑁/2𝑛𝑘 𝑁/2−1 𝑛=0 + 𝑊𝑁𝑘 ∑ h(2n + 1)𝑊𝑁/22𝑛𝑘 𝑁/2−1 𝑛=0 (2.20)
2.5 Principal Component Analysis (PCA)
Principal component analysis (PCA) dikenal sebagai teknik analisa multivariatite. Ide dari PCA adalah digunakan untuk mereduksi dimensi dari himpunan data yang berisi sejumlah besar variabel yang saling terkait, dengan mempertahankan sejumlah besar besar variasi dalam himpunan data. Hal ini dicapai dengan mentransformasikan variabel-variabel ke sebuah himpunan baru yang disebut principal componens (PCs), yang tidak terkorelasi, dan telah terurut sehingga komponen-komponen teratas memperlihatkan sifat umum dari semua variabel asli [14].
PCA mereduksi dimensi dari parameter-patameter tetapi tidak menghilangkan informasi tentang sinyal tersebut. Prosedur yang digunakan dengan menghitung eigenvalue dan eigenvector sebagai berikut [15].
a. Pemberian sebuah himpunan dari vector input dengan dimensi n dan setiap vector memiliki dimensi m, maka:
x(t) = [ 𝑥11 𝑥12 … 𝑥1𝑛 𝑥21 𝑥22 … 𝑥2𝑛 … … … … 𝑥𝑚1 𝑥𝑚2 … 𝑥𝑚𝑛 ] (2.21)
b. mengurangi nilai untuk setiap sel Xij dengan nilai rata-rata (mean) keseluruhan µj uj = 1 𝑚 ∑ 𝑥𝑖𝑗 𝑚 𝑖=1 (2.22) Φij = xij -µj (2.23)
c. Menghitung matrix covariance C
C = ( xij -µj ) (xij -µj )T (2.24)
18 C= 1 𝑚[ ∅11 ∅12 … ∅1𝑛 ∅21 ∅22 … ∅2𝑛 … … … … ∅𝑚1 ∅𝑚2 … ∅𝑚𝑛 ]*[ ∅11 ∅12 … ∅1𝑛 ∅21 ∅22 … ∅2𝑛 … … … … ∅𝑚1 ∅𝑚2 … ∅𝑚𝑛 ] 𝑇 (2.25)
d. Mendapatkan nilai eigenvalue λ dan eigenvector u dari matix covariance C
λi ui = Cui (2.26)
Di mana λi dadalah eigenvalue dari C, ui adalah eigenvector-nya
[ 𝜆1 0 … 0 0 𝜆2 … 0 … … … … 0 0 … 𝜆𝑖 ] _ [ 𝐶11 𝐶12 … 𝐶1𝑛 𝐶21 𝐶22 … 𝐶2𝑛 … … … … 𝐶𝑚1 𝐶𝑚2 … 𝐶𝑚𝑛 ] = 0 (2.27) [ 𝜆1− 𝐶11 −𝐶12 … −𝐶1𝑛 −𝐶21 𝜆2− 𝐶22 … −𝐶2𝑛 … … … … −𝐶𝑚1 −𝐶𝑚2 … 𝜆𝑖 − 𝐶𝑚𝑛 ] = 0 (2.28)
e. Berdasarkan pada ekstraksi ui komponen dari si adalah transformasi orthogonal dari xt
st (i) = uiT xt (2.29)
st (i) disebut dengan principle component. Pengurangan dimensi dari paramater ditunjukan pada persamaan (4.7). dengan nilai ambang dari eigenvector ui dimensi peroleh dimensi data final. Pada penelitian ini n, principal component
19
BAB III
METODE PENELITIAN
Metode penelitian yang digunakan adalah metode eksperimen. Di mana eksperimen yang dilakukan dengan melakukan percobaan terhadap sistem kerja motor induksi tiga fase akibat ketidakseimbangan tegangan.
3.1 Rancangan Penelitian
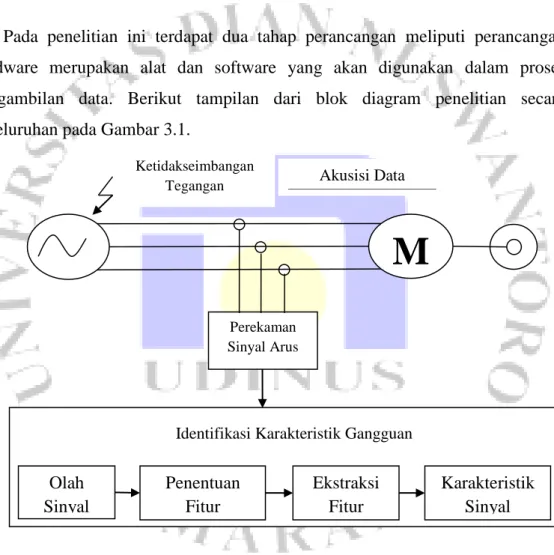
Pada penelitian ini terdapat dua tahap perancangan meliputi perancangan hardware merupakan alat dan software yang akan digunakan dalam proses pengambilan data. Berikut tampilan dari blok diagram penelitian secara keseluruhan pada Gambar 3.1.
Gambar 3. 1 Blok Diagram Penelitian
3.1.1 Rancangan Alat Pengambilan Data
Pada penelitian ini akan dilakukan pengambilan data untuk mengetahui karakteristik ketidakseimbangan tegangan pada motor induksi tiga fase. Pengambilan data dilakukan untuk mendapatkan data berupa gelombang sinyal
M
Perekaman Sinyal Arus Olah Sinyal Penentuan Fitur Ekstraksi Fitur Karakteristik Sinyal Identifikasi Karakteristik GangguanAkusisi Data
Ketidakseimbangan Tegangan
20
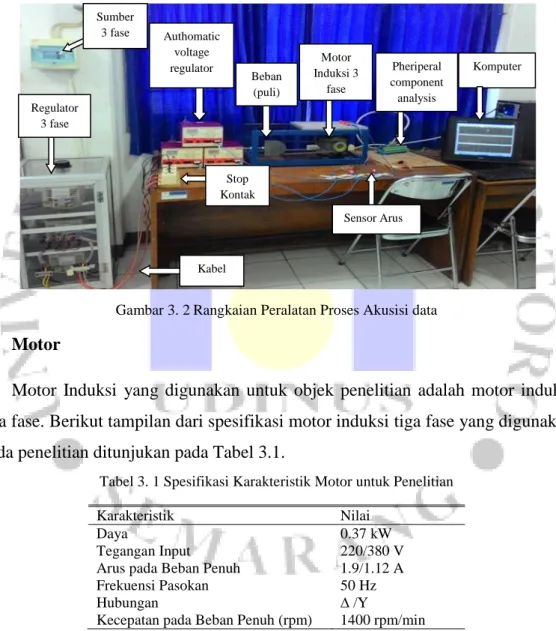
arus yang terbaca sensor arus. adapun alat yang digunakan untuk proses pengambilan data seperti motor induksi tiga fase, pheriperal component Interface (PCI), Authomatic Voltage Regulator (AVR), Beban (puli), kabel, sensor arus (ACS712), Komputer (PC), Sumber listrik AC 3 fase (PLN), Multimeter, Tang arus. Berikut adalah alat pengambilan data dapat dilihat pada Gambar 3.2 berikut ini:
Gambar 3. 2Rangkaian Peralatan Proses Akusisi data
1. Motor
Motor Induksi yang digunakan untuk objek penelitian adalah motor induksi tiga fase. Berikut tampilan dari spesifikasi motor induksi tiga fase yang digunakan pada penelitian ditunjukan pada Tabel 3.1.
Tabel 3. 1 Spesifikasi Karakteristik Motor untuk Penelitian
Karakteristik Nilai
Daya 0.37 kW
Tegangan Input 220/380 V
Arus pada Beban Penuh 1.9/1.12 A Frekuensi Pasokan 50 Hz
Hubungan ∆ /Y
Kecepatan pada Beban Penuh (rpm) 1400 rpm/min
Dan berikut tampilan dari objek penelitian ditunjukan pada Gambar 3.3. Sumber 3 fase Regulator 3 fase Kabel Authomatic voltage regulator Beban (puli) Motor Induksi 3 fase Pheriperal component analysis Sensor Arus Komputer Stop Kontak
Gambar 3. 3 Objek penelitian
2. Pheriperal Component Interface(PCI)
Untuk tampilan gelombang sinyal hasil rekaman dibutuhkan interface. Interface yang digunakan untuk penelitian yaitu PCI jenis 1710. Untuk mengirim dan mengakses data dari dan keluar computer ada pin dalam PCI. Adapun susunan pin PCI ditunjukan pada Gambar 3.4.
Gambar 3. 4 Pin-pin PCI
Untuk Spesifikasi pin PCI ditunjukkan pada Tabel 3.2. 1. Analog Input
Tabel 3. 2 Spesifikasi Analog Input PCI 1710
Parameter nilai
Channel 16 single-ended or 8differential
Resolusi 12-bit
On-board FIFO 4K samples Waktu konversi 8µs Max. Input Overvoltage ±30V Max. Throughput: 100kHz Linier error ±1 LSB Input impedansi 1GΩ
22
2. Analog Input Ground 3. VCC = 5V
3. Authomatic Voltage Regulator (AVR)
Authomatic Voltage regulator digunakan untuk penelitian yaitu Matsunaga Stavol SVC – 500 N. Pemakaian stavol disini adalah sebagai regulator kedua untuk mengatur pasokan tegangan yang akan diubah-ubah (over dan under voltage) sesuai dengan sample yang telah disiapkan. Berikut spesifikasi regulator yang digunkan pada penelitian ditunjukan pada Tabel 3.3.
Tabel 3. 3 Spesifikasi Regulator
Spesifikasi Nilai Fase 1 fase Tegangan input 140 – 240 V Tegangan output 110 – 220 V Frekuensi 50 – 60 Hz Efisiensi 90%
Sistem Pendingin Model 2KVA s/d 10KVA
4. Beban
Beban yang digunakan pada penelitian ini yaitu pulli. Beban disini berfungsi untuk menaikkan arus, karena tanpa beban arus yang dihasilkan motor sangat kecil sehingga akan sulit untuk diidentifikasi.
5. Kabel
Dalam proses pengambilan data kabel digunakan sebagai penghubung antar alat penelitian.
6. Sensor Arus
Sensor arus yang digunakan yaitu sensor arus ACS712. Sensor arus ACS712 merupakan suatu modul sensor arus menggunakan sensor arus linear berbasisi Hall-Effect ACS712 Allegro. Sensor arus digunakan untuk membaca arus yang mengalir pada motor. Spesifikasi sensor arus ditunjukkan pada Tabel 3.4.
Tabel 3. 4 Spesifikasi sensor arus
Parameter Nilai
Rise time output 5 µs.
Bandwidth 80 kHz
Total kesalahan output 1,5% pada suhu kerja TA = 25°C.
Tahanan konduktor internal 1,2 mΩ
Tegangan isolasi minimum 2,1kV RMS antara pin 1-4 dan pin 5-8 Sensitivitas output 185 mV/A.
Pengukuran arus AC atau DC 20A
Tegangan kerja 5 VDC
7. Komputer (PC)
PC digunakan untuk menampilkan gelombang arus yang terbaca oleh sensor arus. Didalam PC terdapat software yang digunakan dalam proses pengambilan data adalah PCI dan MATLAB.
8. Cara Membangkitkan Gangguan
Membangkitkan gangguan pada penelitian ini menggunakan definisi NEMA (National Association Equipment Produsen) yaitu ketidakseimbangan tegangan, dikenal sebagai line voltage unbalance rate (LVUR), dengan rumus:
%LVUR = 𝑑𝑒𝑣𝑖𝑎𝑠𝑖 𝑡𝑒𝑔𝑎𝑛𝑔𝑎𝑛 max 𝑑𝑎𝑟𝑖 𝑟𝑎𝑡𝑎−𝑟𝑎𝑡𝑎 𝑡𝑒𝑔𝑎𝑛𝑔𝑎𝑛 𝑟𝑎𝑡𝑎−𝑟𝑎𝑡𝑎 𝑡𝑒𝑔𝑎𝑛𝑔𝑎𝑛 . 100
Variabel yang diteliti yaitu variabel ketidakseimbangan tegangan. ditunjukan pada Tabel 3.5.
Tabel 3. 5 Variabel ketidakseimbangan tegangan
Under Over Normal
3% 3% -
6% 6%
9% 9%
Pengambilan data variabel ketidakseimbangan pada percobaan berdasarkan pertimbangan Dalam sistem penyediaan tenaga listrik, secara umum tegangan listrik dititik suplai diijinkan bervariasi (+5%) dan (–10%) sesuai standar PLN [17] sedangkan dalam ANSI C 84.1 diijinkan (–10%) dan (+ 4%) dalam kondisi normal sedangkan kondisi tertentu ( darurat ) diijinkan (-13% ) dan (+6%) [18]. Untuk itu pada penelitian di ambil variabel ketidakseimbangan tegangan 3%, 6% dan 9% untuk ketidakseimbangan tegangan under voltage dan over voltage.
24
Under voltage adalah ketidakseimbangan tegangan yang terjadi ketika ada salah satu tegangan di bawah rata-rata. Dan over voltage adalah kondisi ketidakseimbangan tegangan ketika ada salah satu tegangan di atas rata-rata. Variabel ketidakseimbangan yang diteliti merupakan variabel input sedangkan variabel outputnya yaitu Arus. Menurut rumus NEMA didapatkan deviasi tegangan maximal dari tegangan rata-rata dibagi dengan tegangan rata-rata dikali 100. Berikut beberapa contoh data over dan under voltage yang digunakan dalam penelitian ditunjukan pada Tabel 3.6 dan Tabel 3.7.
Tabel 3. 6 sampel data ketidakseimbangan over voltage pada penelitian
No R S T Average Std 1 Std 2 Std 3 Max std % LVUR % 1 220 220 230 223.33 -3.33 -3.33 6.67 6.67 2.99 3% 2 220 222 231 224.33 -4.33 -2.33 6.67 6.67 2.97 3 220 224 232 225.33 -5.33 -1.33 6.67 6.67 2.96 4 220 226 233 226.33 -6.33 -0.33 6.67 6.67 2.95 5 220 228 234 227.33 -7.33 0.67 6.67 6.67 2.93 6 220 221 241 227.33 -7.33 -6.33 13.67 13.67 6.01 6% 7 220 223 242 228.33 -8.33 -5.33 13.67 13.67 5.99 8 220 225 243 229.33 -9.33 -4.33 13.67 13.67 5.96 9 220 227 244 230.33 -10.33 -3.33 13.67 13.67 5.93 10 220 229 245 231.33 -11.33 -2.33 13.67 13.67 5.91 11 220 220 251 230.33 -10.33 -10.33 20.67 20.67 8.97 9% 12 220 221 252 231.00 -11.00 -10.00 21.00 21.00 9.09 13 220 223 253 232.00 -12.00 -9.00 21.00 21.00 9.05 14 220 224 253 232.33 -12.33 -8.33 20.67 20.67 8.90 15 220 225 254 233.00 -13.00 -8.00 21.00 21.00 9.01
Tabel 3. 7 sampel data ketidakseimbangan under voltage pada penelitian No R S T average std1 std2 std3 max std % LVUR % 1 212 220 209 213.67 -1.67 6.33 -4.67 6.33 2.96 3% 2 210 220 211 213.67 -3.67 6.33 -2.67 6.33 2.96 3 208 220 213 213.67 -5.67 6.33 -0.67 6.33 2.96 4 206 220 215 213.67 -7.67 6.33 1.33 6.33 2.96 5 204 220 217 213.67 -9.67 6.33 3.33 6.33 2.96 6 220 204 199 207.67 12.33 -3.67 -8.67 12.33 5.94 6% 7 220 202 201 207.67 12.33 -5.67 -6.67 12.33 5.94 8 206 220 197 207.67 -1.67 12.33 -10.67 12.33 5.94 9 204 220 199 207.67 -3.67 12.33 -8.67 12.33 5.94 10 202 220 201 207.67 -5.67 12.33 -6.67 12.33 5.94 11 220 190 195 201.67 18.33 -11.67 -6.67 18.33 9.09 9% 12 220 192 193 201.67 18.33 -9.67 -8.67 18.33 9.09 13 220 194 191 201.67 18.33 -7.67 -10.67 18.33 9.09 14 220 196 189 201.67 18.33 -5.67 -12.67 18.33 9.09 15 220 198 187 201.67 18.33 -3.67 -14.67 18.33 9.09
3.1.2 PCI & MATLAB
Proses pengambilan data pada penelitian ini yaitu menggunakan PCI. PCI digunakan untuk merekam serta menampilkan data arus yang dibaca oleh sensor arus. Data yang diterima PCI berupa sinyal gelombang arus. Sinyal tersebut diperoleh dari PCI yang dihubungkan dengan PC untuk interface.
3.2 Langkah Pengambilan Data
Pengambilan data pada tugas akhir ini, akan dilakukan pengambilan data dengan mengatur tegangan yang masuk ke motor dengan tegangan yang tidak seimbang yaitu dengan cara mengatur regulator satu fase sesuai data yang telah disiapkan. Skema pengambilan data yang dilakukan dapat dilihat pada Gambar 3.5.
26
Gambar 3. 5 Skema pengambilan data
Adapun langkah-langkah untuk pengambilan data ketidakseimbangan tegangan sebagai berikut :
1. Menyediakan alat dan bahan yang diperlukan dalam penelitian seperti Gambar di atas.
2. Menyambungkan sumber tiga fase dengan regulator 3 fase untuk mengatur tegangan output 380V antar fasenya.
3. Menyambungkan regulator 3 fase dengan 3 stop kontak yang telah dibuat untuk sambungan per fasenya.
4. Menyambungkan switch dengan regulator satu fase, tegangan input dari regulator satu fase yang digunakan untuk mengatur tegangan tidak seimbang sesuai sampel data yang telah dibuat dan kemudian masuk ke motor untuk diambil data ketidakseimbangan tegangan yang masuk pada motor.
5. Merangkai kabel untuk sambungan input sensor. Ada 2 lubang input pada sensor yang satu masuk ke motor yang satunya masuk ke output regulator satu fase yang bermuatan listrik, untuk mengecek ada tidaknya aliran listrik
pada output regulator satu fase menggunakan tespen. Adapun pemasangan sensor ditunjukkan pada Tabel 3.8.
Tabel 3. 8 Interface Pin Sensor
Interface alokasi pin
Pin Nama fungsi
1 VCC Input 5 VDC tegangan input 2 Out Output Sensor output 3 Ground - Titik referensi Ground
Adapun Gambar sensor arus ACS712 pada penelitian ditunjukkan pada Gambar 3.6.
Gambar 3. 6 Sensor arus ACS712 Aleggro
6. Menyambungkan kabel sambungan input kesatu sensor ke motor. Penyambungan input sensor bisa bolak balik.
7. Menyambungkan kabel sambungan input kedua sensor ke AVR, dengan menggukan steker yang yang beraliran listrik atau yang mempunyai muatan +, untuk mengeceknya dengan multimeter.
8. Dari sensor kemudian kabel di hubungkan terminal input motor 3 fase. Untuk gangguan ketidakseimbangan tegangan, motor di posisikan pada model delta. Dalam perlakuan pengkondisian saat pengambilan data ketidakseimbangan tegangan ada 6 dan 1 normal perlakuan diantaranya dapat dilihat pada Tabel 3.9.
28
Tabel 3. 9 Jumlah data kondisi gangguan dan normal
Kondisi Ambil data Data original Data Wavelet (Cd3s) Data fitur UV 3% Under 30x 2000x3= 6000 750x30 19x30 UV 6% Under 30x 2000x3= 6000 750x30 19x30 UV 9% Under 30x 2000x3= 6000 750x30 19x30 UV 3% Over 30x 2000x3= 6000 750x30 19x30 UV 6% Over 30x 2000x3= 6000 750x30 19x30 UV 9% Over 30x 2000x3= 6000 750x30 19x30 Normal 30x 2000x3= 6000 750x30 19x30 jumlah 210x - 750x210 19x210
9. Menghubungkan sensor ke PCI
Mengatur dan menyambungkan pin-pin sensor sesuai datasheet sensor dengan pin PCI, pin out sensor masuk ke pin input PCI yaitu pin 68 untuk analog input 0, pin 36 untuk analog input 1 dan pin 67 untuk analog input 2. Pin VCC sensor masuk ke pin VCC PCI yaitu pin 1. Pin ground sensor masuk ke pin ground PCI yaitu pin 30.
10. Mengkoneksikan PCI ke komputer dan mengatur interface dengan matlab dengan setting analog input, setup dengan Advantech PCI-1710 dan isi parameter sesuai kebutuhan lalu install new board. Setting blok parameter analog input ditunjukan pada Tabel 3.10.
Tabel 3. 10 Blok parameter Analog Input
Block parameter Analog Input
Sample Time 0,0005
Input Channel 1
Input Range -10-10 V Block Output Signal Volts Output data type Single
11. Mengatur tampilan simulink matlab untuk pengambilan data yang telah terhubung PCI. PCI berperan untuk membca, mengolah dan menampilkan data pada PC. Berikut tampilan dari simulink matlab dapat dilihat pada Gambar 3.7 berikut ini.
Gambar 3. 7 Model Simulink
Berikut keterangan dari model simulink di atas :
Analog Input
Digunakan sebagai inputan dari PCI yang dibaca sensor. Constant
Digunakan sebagai kalibrasi untuk mengurangkan analog input yang terbaca sensor arus supaya terbaca pada titik nol.
Substract
Digunakan sebagai penjumlah dan pengurang dari inputan. Gain
Digunakan untuk penguat sinyal. Scope
Digunakan untuk menampilkan dan menyimpan sinyal yang direkam. 12. Untuk dapat menjalankan program simulink, perlu untuk dibuild terlebih
30
Gambar 3. 8 Tampilan Konfigurasi Parameter Build
13. Setelah simulink sudah siap, untuk merekam dan mengambil data dengan menyalakan sumber 3 fase untuk memutar motor dan untuk di ambil data arus yang mengalir pada motor.
3.3 Langkah Pengolahan Data
Pengolahan data dilakukan untuk mendapatkan karakteristik ketidakseimbangan tegangan. Langkah pengolahan data yaitu menggunakan transformasi wavelet dan FFT. Proses pengolahan data pada peneliatian ini, menggunakan dekomposisi wavelet. Proses dekomposisi wavelet adalah proses turunan dari sinyal komposisi sinyal asli. Dekomposisi sinyal wavelet dimaksudkan proses mengubah sinyal asli ke bentuk atau karakter yang lebih sederhana tanpa mengubah bentuk sinyal asli. Penggunaan wavelet adalah untuk menentukan sinyal detail dan sinyal approximasi dari sinyal arus domain waktu. Setelah penggunaan wavelet yaitu proses FFT untuk mendapatkan sinyal arus domain frekuensi. Adapun alur pengolahan data dapat dilihat pada Gambar 3.9 berikut:
Gambar 3. 9 Langkah Pengolahan data
Dari objek penelitian diperoleh sinyal arus yang kemudian diolah menggunakan wavelet, berikut skema pengolahan data meggunakan wavelet:
Gambar 3. 10 Skema Pengolahan data sinyal arus
Pengolahan data dalam penelitian ini dilakukan dengan mengkombinasikan transformasi wavelet dengan transformasi fourier. Data sinyal wavelet yang difilter diproses dan dilakukan pengulangan sampai level yang sesuai. Berikut langkah-langkah pengolahan data wavelet dan transformasi fourier:
3.1 Sinyal asli direkam didekomposisikan menggunakan transformasi wavelet pada level ke-n untuk setiap kolom sehingga menghasilkan koefisien sinyal detail cDn dan koefisien sinyal aproksimasi cAn.
Wavelet FFT Fitur X(t) cA11 cA12 cA13 cD13 cD12 cD11 Objek Sinyal Arus Wavelet (approximasi,detail) FFT (sinyal detail) Data Fitur
32
3.2 Dari sinyal hasil wavelet di dapat sinyal detail cDn untuk kemudian diolah ke domain frekuensi.
3.3 Berdasarkan hasil pengolahan wavelet dan transformasi fourier selanjutnya akan ditentukan untuk fitur-fiturnya.
3.4 Metode Identifikasi Karakteristik
Metode yang digunakan dalam penelitian untuk mengidentifikasi gangguan ketidakseimbangan tegangan pada motor induksi tiga fase dengan 3 tahap, yaitu dekomposisi wavelet, penentuan fitur dan ekstraksi fitur. Skema identifikasi karakteristik ditunjukkan pada Gambar 3.11.
Gambar 3. 11 Identifikasi karakteristik
Dalam identifikasi karakteristik digunakan gabungan analisa wavelet, fast fourier transform, dan principle component analysis.
3.4.1 Transformasi wavelet dan FFT
Untuk identifikasi karakteristik dengan menggunakan wavelet dan FFT yang sudah dijelaskan sebelumnya. Data yang di olah yang telah melewati proses dekomposisi tersebut dibutuhkan untuk proses ekstraksi fitur. Wavelet dan FFT digunakan untuk menentukan fitur berdasarkan domain waktu dan domain frekuensi.
3.4.2 Penentuan Fitur
Perhitungan fitur Setelah melewati proses di wavelet dan FFT, parameter-parameter fitur dihitung berdasarkan domain waktu dan domain frekuensi. Perhitungan fitur dilakukan berdasrkan operasi statistika. Terdapat 19 fitur untuk
Sinyal arus
Penentuan Fitur
domain waktu Ekstraksi Fitur (PCA) Hasil Karakteristik FFT Wavelet Penentuan Fitur domain frekuensi
setiap kondisi gangguan. Terdapat 6 Kondisi gangguan serta 1 kondisi normal dan setiap kondisi memiliki 30 ulangan, sehingga total terdapat 210 data yang dihitung. Fitur yang dipakai meliputi mean, median, varian, RMS, Total Harmonic Distortion (THD), Crest factor, form factor, peak, energi. Berikut tampilan dari rumus fitur yang dipakai:
Mean adalah nilai rata-rata dari kumpulan data. Jika n data bernilai xi, maka nilai rata-ratanya.
µ =
1𝑛
∑ 𝑥
𝑖 𝑛1
(3.1)
Median adalah nilai sentral yang menunjukan nilai ditengah-tengah barisan yang telah diurtkan dari nilai yang terkecil ke yang terbesar. Varian dan standart deviasi merupakan Gambaran penyebaran data dalam sebuah sampel.
𝜎2 = 1 𝑛−1∑ (𝑥1 𝑛 1 -µ)2 (3.2) 𝜎 =√ 1 𝑛−1∑ (𝑥1 𝑛 1 -µ)2 (3.3)
Fitur lain yang dihitung antara lain: RMS, form factor, crest factor, THD, dan peak. 𝐼𝑅𝑀𝑆
=
𝐼𝑀𝑎𝑥 √2(3.4) 𝐼𝐻
=
√𝐼22+𝐼 32+ … … + 𝐼𝑛2 (3.5) THD=
𝐼𝐻𝐼𝐹
, I
F=
Nilai RMS arus fundamental (3.6)Crest Factor = 𝑃𝑒𝑎𝑘 𝑉𝑎𝑙𝑢𝑒
𝑅𝑀𝑆 𝑉𝑎𝑙𝑢𝑒 (3.7)
Form factor = 𝑅𝑀𝑆 𝑣𝑎𝑙𝑢𝑒
𝐴𝑣𝑒𝑟𝑎𝑔𝑒 𝑉𝑎𝑙𝑢𝑒 (3.8)
Entropy adalah energy yang tidak dapat dilakukan untuk usaha. Pada penelitian menggunakan 5 entropy yaitu entropy shannon, norm, log energi, threshold, sure. Berikut rumus dari entropy berturut:
Entropy E, dimana E harus E(0) = 0 dan
34
Rumus Entropy “Shannon”,
E1(si) = si 2log(si2) s0 (3.10)
E1(si) = − ∑ 𝑆𝑖𝑖 2 log (Si2) (3.11)
Dengan 0 log (0) = 0
Rumus dari Entropy “Norm”, dengan 1 ≤ p,
E2(si) = lsilp s0 (3.11)
𝐸2(𝑠𝑖) = ∑ |𝑠𝑖|𝑖 p = ||s||pp (3.12)
Rumus dari Entropy “Log energi” ,
E3(si) = log (si 2) s0 (3.12)
E3(si) = ∑ 𝑙𝑜𝑔𝑖 (Si2) (3.13)
Dengan log (0) = 0
Rumus Entropy “Threshold”
E4(s)= 1 jika |si| > p dan 0 jika s0 (3.14)
E4(s) = #{I seperti |si| > p} (3.15)
Rumus Entropy “Sure”
E5(s)= n - #{I seperti |si| ≤ p} + ∑ min (𝑠𝑖^2, 𝑝^2𝑖 ) (3.16) Nilai parameter fitur yang dihitung berdasarkan nilai statistik meliputi: mean, median, varian, RMS, Total Harmonic Distortion (THD), Crest factor, form factor, peak, energi. Berikut tampilan fitur dalam domain waktu dan domain frekuensi ditunjukan pada Tabel 3.11.
Tabel 3. 11 Fitur Parameter Arus
No Fitur Domain Waktu No Fitur Domain Frekuensi
1 Mean 13 Rms
2 Median 14 Crest factor 3 Variance 15 Form factor
4 Rms 16 THD
5 Standart deviasi 17 Peak 6 Entropy Shannon 18 Mean 7 Entropy log energi 19 variance 8 Entropy threshold
9 Entropy sure 10 Entropy norm 11 Energi approksimasi 12 Energi detail
3.4.3 Ekstraksi Fitur dengan Pinciple Component Analysis
Ekstraksi fitur menggunakan PCA bertujuan untuk mengurangi dimensi dari himpunan data dan tetap mempertahankan karakteristik dari himpunan data tersebut dengan menjaga beberapa principle component yang tinggi prioritasnya dan membuang yang rendah prioritasnya. Hasil ekstraksi fitur yang dipakai dapat diketahui dari nilai eigenvalue lebih dari nol sebagai fitur yang dipakai untuk meawakili hasil karakteristik sinyal arus, dan hasil eigenvalue yang mendekati nol merupakan hasil fitur yang dibuang.
Proses ekstraksi fitur menggunakan PCA sesuai dengan langkah langkah yang dijelaskan dalam bab 2. Berdasarkan hasil fitur didapatkan 19 baris fitur dan 210 kolom data. Prosedur PCA sebagai berikut:
1 Penyajian sebuah himpunan yang terdiri dari vektor input berjumlah 19 baris dan 210 kolom, maka:
x(t) = [ x11 x12 … x1,210 x21 x22 … x2,210 … … … … x19,1 xm2 … x19,210 ]
2 mengurangi nilai untuk setiap sel Xij dengan nilai rata-rata (mean) keseluruhan µj
uj = 1
𝑚 ∑ 𝑥𝑖𝑗 𝑚 𝑖=1
36
Φij = xij -µj
Dalam Matrik dituliskan sebagai berikut:
Φij= [ x11− x1 x12− x2 … x1,210− x210 x21− x1 x22− x2 … x2,210− x210 … … … … x19,1− x1 xm2 − x2 … x19,210 − x210 ]
3 Menghitung matrix covariance C C = ( xij -µj ) (xij -µj )T
Secara matrix dituliskan sebagai berikut
C= 1 𝑚[ ∅11 ∅12 … ∅1,210 ∅21 ∅22 … ∅2,210 … … … … ∅19,1 ∅19,2 … ∅19,210 ]*[ ∅11 ∅12 … ∅1,210 ∅21 ∅22 … ∅2,210 … … … … ∅19,1 ∅19,2 … ∅19,210 ] 𝑇
4 Mendapatkan nilai eigenvalue λ dan eigenvector u dari matix covariance C λi ui = Cui
λi adalah eigenvalue dan ui adalah eigenvector dari matriks C.
Perhitungan eigenvalue dan eigenvektor dihitung dengan matlah dengan perintah sebagai berikut [eigenvalue, eigenvektor] = eig(C)
5 Berdasarkan pada ekstraksi ui komponen dari si adalah transformasi orthogonal dari xt
st (i) = uiT xt
36
BAB IV
HASIL DAN PEMBAHASAN
Pada bab hasil dan pembahasan, akan dijelaskan hasil percobaan simulasi gangguan ketidakseimbangan tegangan untuk mengetahui karakteristik gangguan pada motor induksi tiga fase.
4.1 Kondisi Sinyal Normal dan Sinyal Gangguan
Sebelum masuk ke pengolahan sinyal berikut contoh hasil sinyal yang akan dianalisis berupa sinyal Normal dan sinyal gangguan unbalance voltage (UV) ditunjukkan pada Gambar 4.1 sampai 4.7.
Gambar 4. 1 Sinyal pada kondisi normal
Berdasarkan pada Gambar 4.1 terlihat bahwa amplitudo pada fase R, S, T hampir sama. Walaupun terlihat sedikit noise pada fase R tetapi tinggi setiap peak sinyal sama yang menunjukan bahwa tegangan seimbang.
37
Gambar 4. 2 Sinyal gangguan UV 3% over voltage
Gambar 4. 3 Sinyal gangguan UV 6% over voltage
Berdasarkan pada Gambar 4.2, 4.3 dan 4.4 terlihat bahwa amplitudo pada fase R, S, T tidak sama yang menunjukkan bahwa adanya ketidakseimbangan tegangan pada motor induksi. Sinyal dari ketiga Gambar diatas terlihat berbeda berdasarkan besar gangguannya. Semakin kecil presentase ketidakseimbangan tegangan maka presentase ketidakseimbangan arus yang dihasilkan akan lebih besar. Begitu pula sebaliknya. Hal ini disebabkan karena terjadinya perputaran yang berlawanan dengan kondisi tegangan seimbang, yang menghasilkan celah udara pada perputaran fluksi yang berlawanan dengan rotasi rotor sehingga cenderung menghasilkan arus yang tinggi.
Gambar 4. 5 Sinyal gangguan UV 3% under voltage
39
Gambar 4. 7 Sinyal gangguan UV 9% under voltage
Berdasarkan pada Gambar 4.5, 4.6 dan 4.7 terlihat bahwa amplitudo pada fase R, S, T tidak sama yang menunjukkan bahwa adanya ketidakseimbangan tegangan pada motor induksi. Sinyal dari ketiga Gambar diatas terlihat berbeda berdasarkan besar gangguannya. Semakin kecil presentase ketidakseimbangan tegangan maka presentase ketidakseimbangan arus yang dihasilkan akan lebih besar. Begitu pula sebaliknya. Hal ini disebabkan karena terjadinya perputaran yang berlawanan dengan kondisi tegangan seimbang, yang menghasilkan celah udara pada perputaran fluksi yang berlawanan dengan rotasi rotor sehingga cenderung menghasilkan arus yang tinggi.
4.2 Pengolahan Sinyal
4.2.1. Analisis Transformasi Wavelet
Tahap awal pengolahan data yaitu menggunakan wavelet yang berfungsi untuk memisahkan sinyal asli dengan sinyal noise dan sebagai penentuan fitur domain waktu. dan FFT untuk penentuan fitur domain frekuensi. Berikut salah satu sinyal untuk sampel pembuktian penggunaan level transformasi wavelet yaitu pada sinyal fase R kondisi gangguan 3% Over voltage. hasil sinyal aproksimasi ditunjukan pada Gambar 4.8.
Gambar 4. 8 Sinyal approximasi transformasi wavelet
Dari Gambar 4.8 di ketahui pengolahan sinyal menggunakan transformasi wavelet sampai 4 level. Dengan transformasi wavelet diharapkan sinyal menjadi lebih jelas dengan ukuran yang lebih kecil. Berdasarkan Gambar 4.8 terlihat dengan dekomposisi wavelet sinyal aproximasi pada level 3 ukuran sinyal menjadi kecil dan sinyal masih dapat dikenali dengan baik. Sedangkan untuk dekomposisi pada level 4 bentuk sinyal telah berubah jauh dari sinyal asli sehingga sinyal pada level 4 tidak cukup baik untuk dikenali. Sehingga pada proses transformasi wavelet dilakukan pada level 3. Dan berikut tampilan dari sinyal detail ditunjukkan pada Gambar 4.9.
41
Gambar 4. 9 Sinyal detail transformasi wavelet
Dari Gambar 4.8 di ketahui pengolahan sinyal menggunakan transformasi wavelet sinyal approximasi menggunakan level 3. Sinyal approximasi digunakan sebagai fungsi skala dan sinyal detail sebagai fungsi wavelet. Dengan melihat sinyal approksimasi sebagai fungsi skala menggunakan level 3, maka sinyal detail sebagai fungsi wavelet juga menggunakan sinyal detail level 3 untuk dianalisis.
4.2.2. Analisis Transformasi Fourier
Penggunaan FFT pada analisa data adalah untuk mempermudah proses analisis. Hasil sinyal asli yang langsung di ditransformasi fourier seperti ditunjukkan pada Gambar 4.10.
Gambar 4. 10 Sinyal hasil pengukuran pengolahan FFT
Dari Gambar 4.10 diketahui bentuk sinyal gangguan ketidakseimbangan tegangan 3 fase pada kondisi 3% Over voltage. Untuk pengolahan sinyal gangguan ketidakseimbangan tegangan tidak bisa langsung dengan menggunakan transformasi fourier, terlihat bahwa Gambar sinyal transformasi fourier skalanya masih terlalu besar dan sulit untuk dianalisis. Dari itu dilakukan dekomposisi wavelet untuk mendapatkan Gambaran sinyal yang sesuai dengan detail sinyal.
4.3 Hasil dan Pembahasan
4.3.1. Hasil Pengolahan Wavelet
Berikut salah satu tampilan sinyal approximasi 3 dan sinyal detail 3 per kondisi gangguan ditunjukan pada Gambar 4.11 sampai 4.17.
43
Gambar 4. 11 Sinyal hasil pengukuran, Approximasi 3, Detail 3 Normal
Dari Gambar 4.11 dapat diketahui bahwa sinyal pengukuran, sinyal approximasi, dan sinyal detail 3 pada kondisi normal. Untuk analisis data yaitu menggunakan transformasi fourier untuk mengubah data dari domain waktu ke domain frekuensi untuk mempermudah proses analisis, dan untuk memperoleh informasi yang lebih jelas yang terkandung dalam data.
Gambar 4. 12 Sinyal hasil pengukuran, Approximasi 3, Detail 3 UV 3% over
![Gambar 1. 1 perkiraan “persen voltage unbalance” (PVU) di sistem distribusi Amerika serikat [3]](https://thumb-ap.123doks.com/thumbv2/123dok/4598072.3354041/15.892.194.744.377.1106/gambar-perkiraan-persen-voltage-unbalance-distribusi-amerika-serikat.webp)

![Gambar 2. 2 Bentuk Konstruksi motor induksi [9]](https://thumb-ap.123doks.com/thumbv2/123dok/4598072.3354041/21.892.206.731.377.927/gambar-bentuk-konstruksi-motor-induksi.webp)
![Gambar 2. 3 Skematik motor induksi 2 kutub [9]](https://thumb-ap.123doks.com/thumbv2/123dok/4598072.3354041/22.892.196.747.378.1081/gambar-skematik-motor-induksi-kutub.webp)
![Gambar 2. 4 Medan putar motor induksi 2 kutub [9]](https://thumb-ap.123doks.com/thumbv2/123dok/4598072.3354041/23.892.195.748.379.1025/gambar-medan-putar-motor-induksi-kutub.webp)