3
2. TINJAUAN PUSTAKA
2.1 Ketentuan International Hydrographic Organisation (IHO) Standards For Hydrographic Survei (S.44-IHO)
Informasi mengenai kondisi dasar laut dapat diperoleh melalui sebuah kegiatan yang disebut survei batimetri. Kajian untuk mengetahui keberadaan gunung bawah laut (seamount) dititikberatkan pada perolehan data batimetri suatu perairan. Kegiatan pemeruman (sounding) memungkinkan untuk mengetahui kedalaman laut. Kegiatan pemeruman hanya dilakukan di beberapa titik saja sesuai dengan objek yang ingin diperoleh. Batimetri adalah ukuran tinggi rendahnya dasar laut yang merupakan sumber informasi utama mengenai dasar laut (Ariana, 2002).
Publikasi khusus yang dilakukan oleh International Hydrography
Organization melalui IHO Standars For Hydrographic Surveys edisi ke-4 tahun 1998 manyatakan bahwa dalam melakukan survei batimetri dibagi menjadi beberapa orde yang berbeda sesuai dengan pembagian kawasan lokasi survei dilakukan. Publikasi ini juga digunakan sebagai acuan untuk melakukan survei berdasarkan standar internasional. Ketentuan ini dibuat untuk memberlakukan spesifikasi minimum yang harus dipenuhi dalam pengumpulan data-data yang tepat untuk keselamatan navigasi para pelaut (Gumbira, 2011).
2.2 Klasifikasi Survei
Berdasarkan publikasi khusus IHO tahun 1998 terdapat beberapa
klasifikasi orde dalam pembagian survei hidrografi. Orde tersebut dibagi menjadi orde khusus, orde satu, orde dua dan orde tiga.
4 2.2.1 Orde Khusus
Orde ini diperuntukkan bagi wilayah-wilayah kritis dan miliki
karakteristik dasar perairan yang mampu membahayakan kapal. Daerah kritis tersebut ditentukan langsung oleh instansi yang bertanggung jawab dalam
pelaksanaan survei batimetri. Contoh kawasan yang termasuk kedalam klasifikasi orde khusus ini adalah pelabuhan-pelabuhan tempat sandar kapal dan alur
masuknya kapal. Semua kesalahan harus dibuat seminimal mungkin untuk menghasilkan image dasar perairan dengan resolusi yang tinggi. Kegiatan survei hidrografi pada orde ini dilakukan dengan jarak antar lajur perum yang rapat. Hal yang harus diperhatikan juga pada orde ini adalah setiap benda dengan ukuran lebih besar dari satu meter persegi dapat terlihat oleh peralatan perum yang digunakan.
2.2.2 Orde Satu
Survei hidrografi yang termasuk kedalam orde ini diperuntukkan bagi pelabuhan-pelabuhan, haluan pendekat yang dianjurkan, alur navigasi dan beberapa pantai dengan lalu lintas komersial yang padat dengan kedalaman dibawah lunas kapal cukup memadai dan kondisi dasar perairan tidak membahayakan kapal. Survei orde satu berlaku di daerah yang memiliki
kedalaman perairan kurang dari 100 meter. Pada daerah yang termasuk kedalam klasifikasi orde ini, harus diyakinkan bahwa pada kedalaman sampai dengan 40 meter, benda dengan ukuran lebih besar dari dua meter persegi atau benda-benda pada kedalaman lebih 40 meter, harus mampu digambarkan oleh alat pemeruman.
5 2.2.3 Orde Dua
Orde ini diperuntukkan bagi daerah-daerah yang memiliki kedalaman perairan kurang dari 200 meter. Daerah ini diperkirakan memiliki batimetri yang karakteristiknya tidak membahyakan kapal dalam pelaksanaan survei hidrografi.
2.2.4 Orde Tiga
Klasifikasi ini diperuntukkan bagi semua area yang tidak termasuk kedalam kategori orde khusus, orde satu maupun orde dua. Survei hidrografi termasuk kedalam orde ini jika kedalaman perairan atau batimetri lebih dari 200 meter.
Tabel 1. Standar minimum pelaksanaan survei hidrografi
Sumber : International Hydrographic Organization, 1998. IHO Standards for Hydrographic Surveys, Special Publication No. 44, 4th Edition
Tabel di atas menjelaskan standar minimum yang harus dilakukan ketika melaksanakan survei hidrografi. Perhitungan limit error dari akurasi kedalaman
6
sangat diperlukan untuk tujuan validasi data yang dihasilkan. Perhitungan limit error ini didasarkan pada nilai a dan nilai b yang terdapat pada tabel standar minimum survei hidrografi di atas.
2.3 Prinsip Kerja Multibeam
Multibeam merupakan instrumen hidroakustik yang banyak digunakan dalam survei batimetri. Hal ini disebabkan kemampuan instrumen tersebut dalam melakukan pemeruman dasar laut dengan akurasi yang sangat tinggi dan cakupan yang luas (Anderson et al., 2008). Multibeam mengirimkan pulsa suara dalam jumlah yang banyak ke dasar perairan, hal ini memungkinkan untuk dapat dilakukan pemetaan dasar laut secara luas. Prinsip kerja pada instrumen akustik ini pada umumnya sama dengan single beam, yaitu dengan mengukur perbedaan waktu yang dipancarkan dan diterima kembali oleh receiver. Menurut Intelmann et al., tahun 2004 menjelaskan bahwa pemrosesan data multibeam relatif lebih rumit bila dibandingkan dengan gelombang suara single beam. Untuk
kepentingan data geologi dasar perairan, diperlukan adanya kompensasi sudut datang dari masing-masing beam yang dipancarkan oleh transducer. Langkah yang harus dilakukan dalam pemrosesan data hambur balik (backscatter) yaitu melalui sebuah algoritma.
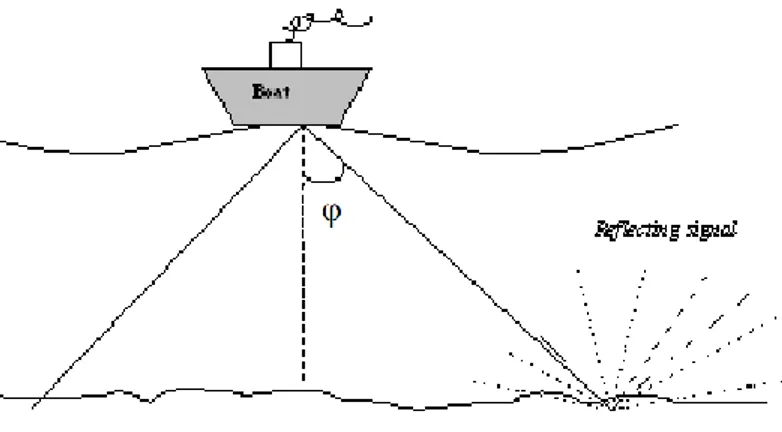
Data kedalaman dari masing-masing pulsa suara yang dipancarkan terdiri dari nilai amplitudo yang berasal dari pulsa suara yang dipantulkan kembali oleh dasar perairan. Informasi ini disebut data backscatter dan digunakan untuk mengetahui kondisi dasar laut (Gambar 1). Gelombang pantul yang lemah (amplitudo kecil) mengindikasikan substrat dasar perairan yang nilai kekasarannya (roughness) lemah dan gelombang pantul yang kuat
7
mengindikasikan material dasar perairan yang tingkat kekasarannya (roughness) tinggi.
Gambar 1. Prinsip pengukuran backscattering menggunakan multibeam (Kågesten, 2008)
Beberapa dekade terakhir ini terjadi perkembangan pemetaan dasar perairan melalui metode akustik. Perkembangan akustik kelautan dimulai pada tahun 1912. Akustik digunakan untuk mendeteksi keberadaan gunung es yang menyebabkan kecelakaan kapal Titanic yang dilakukan oleh Alexander Behm. Pada awal tahun 1950, teknik penggunaan multibeam dikembangkan oleh tentara Amerika yang menggunakan lebih dari satu pulsa suara yang dipancarkan pada saat yang bersamaan. Perkembangan multibeam berkembang dengan cepat pada tahun 80 hingga 90an (Furgo Palagos, 2003). Keuntungan dari sistem ini
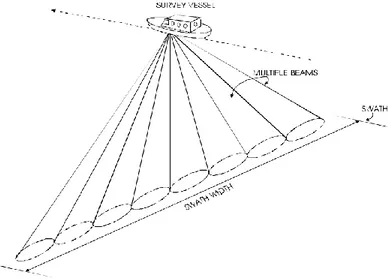
memiliki kemampuan penentuan posisi yang akurat dan membantu untuk menghasilkan peta batimetri dengan resolusi spasial yang tinggi. Gambar 2 di bawah ini menjelaskan bentuk sapuan dari multibeam yang dipancarkan oleh transducer ke dalam kolom perairan ketika melakukan kegiatan pemeruman (sounding).
8
Gambar 2. Visualisasi sapuan multibeam (L-3 Communication ELAC Nautic GmbH, 2003)
2.4 ELAC SeaBeam 1050D
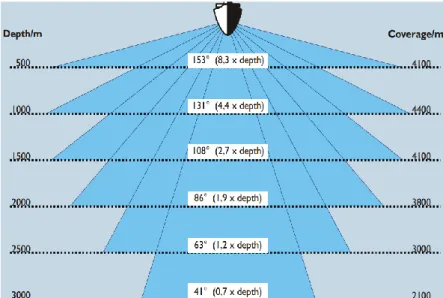
Multibeam ELAC SeaBeam 1050D merupakan jenis instrumen akustik yang dapat digunakan pada kedalaman laut medium, yaitu laut dengan kedalaman mencapai 3000 meter. Multibeam jenis ini memiliki kemampuan untuk
memetakan wilayah laut secara luas dengan lebar sapuan mencapai 153o dan memiliki 126 beam dengan jumlah bukaan 1.5o untuk masing-masing beam. SeaBeam 1050D memiliki dua frekuensi (dual frequency) yang dapat digunakan, yaitu 50 kHz dan 180 kHz. Kemampuan deteksi menggunakan frekuensi 50 kHz mencapai kedalaman 3000 meter sedangkan frekuensi 180 kHz digunakan untuk kedalaman 0-580 meter. Bentuk pancaran gelombang yang ditransmisikan dari sebuah transducer pada intrumen akustik khususnya SeaBeam 1050D dapat dilihat seperti gambar 3 di bawah ini.
9 (a)
(b)
Gambar 3. Jangkauan sapuan ELAC SeaBeam 1050D terhadap kedalaman perairan (a) dengan frekuansi 50 kHz dan (b) dengan Frekuensi 180 kHz (L3 Communications SEA BEAM 1050D-Multibeam
Sonar, 2003)
2.5 Simrad EM 12D
Simrad EM 12D merupakan sebuah instrumen akustik yang mampu
melakukan pemeruman (sounding) dengan tingkat akurasi dan resolusi yang tinggi (Kongsberg, 2003). Simrad EM 12D juga telah dikonfigurasikan dengan
10
ketentuan standarisasi berdasarkan ketetapan terbaru yang dibuat oleh
International Hydrography Organisatioan (IHO). Jumlah beam per ping pada instrumen ini terdiri dari 162 beam. Simrad EM 12D mampu melakukan pemeruman hingga kedalaman 10.000 meter. Tingkat resolusi yang diberikan oleh instrumen ini sangat tinggi sehingga akan memberikan gambaran objek yang detail dengan kualitas data yang baik. Resolusi kedalaman yang diberikan oleh Simrad EM 12D yaitu 1 meter. Sedangkan akurasi kedalaman dari alat ini mencapai 5 cm Root Means Square (RMS).
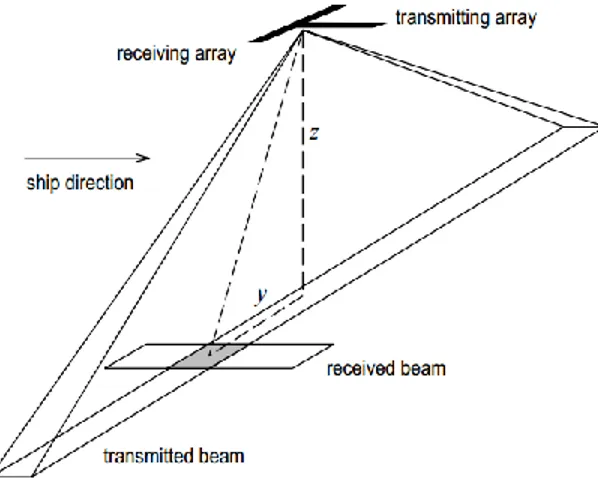
Multibeam saat ini menjadi teknologi yang paling penting dalam pemetaan dasar perairan. Instrumen ini terdiri dari sinyal yang dipancarkan ke dasar perairan dan menganalisis pantulan dari sinyal tersebut dalam bentuk data kedalaman dan gambaran dasar perairan.
Gambar 4. Konfigurasi linear transducer dan pola beam yang dihasilkan dari sistem multibeam (RØnhovde et al., 1999 )
2.6 Kalibrasi Multibeam
Data yang diperoleh dari hasil pemeruman (sounding) harus melewati proses kalibrasi terhadap adanya pengaruh pergerakan kapal yang diakibatkan
11
oleh adanya pergerakan masa air laut atau dinamika laut. Tahapan ini dilakukan untuk mengurangi besarnya kesalahan (error) yang akan terjadi selama
perekaman data. Selain itu juga proses kalibrasi ini akan menentukan kualitas data yang akan dihasilkan. Proses kalibrasi yang dilakukan terdiri dari kalibrasi offset static, pitch, roll, time delay, cepat rambat gelombang suara (sound speed) dan uji keseimbangan kapal (Mann dan Godin, 1996).
2.6.1 Kalibrasi Offset Static
Kalibrasi ini bertujuan untuk melakukan penyesuaian jarak dari sensor yang digunakan terhadap centerline dari kapal dan transducer. Godin (1998)
menyatakan bahwa offset statik diukur dari titik referensi yang digunakan pada koordinat transformasi pengukuran kedalaman. Contoh pengukuran offset statik dapat dilihat pada gambar 5. Proses kalibrasi ini memerlukan beberapa komponen, yaitu kapal, antena GPS kapal, transducer, dan kompas gyro
Gambar 5. Kalibrasi offset static (Godin, 1998)
Beberapa tahapan koreksi yang dilakukan seperti pitch, roll, time delay yang dilakukan memiliki tujuan untuk menghilangkan pengaruh terjadinya perubahan posisi kapal di laut.
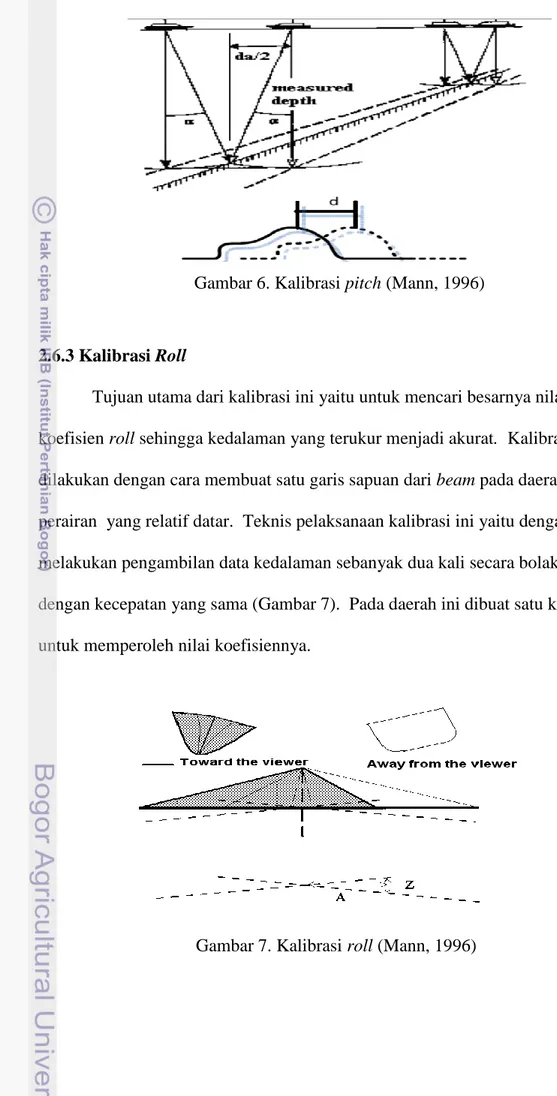
12 2.6.2 Kalibrasi Pitch
Tujuan dari kalibrasi ini adalah untuk mencari nilai koefisien pitch. Pitch dapat didefinisikan sebagai pengaruh pergerakan kapal selama melakukan kegiatan sounding terhadap sumbu-Y. Kalibrasi ini perlu dilakukan agar hasil pengukuran kedalaman menjadi akurat. Teknis pelaksanaan dari kalibrasi pitch ini dilakukan dengan membuat garis sapuan dari multibeam yang memiliki kemiringan (slope) tertentu. Pengambilan data ini dilakukan sebanyak dua kali secara bolak-balik dengan kecepatan yang sama. Setelah itu pengambilan data yang kedua dilakukan dengan menggunakan setengah dari nilai kecepatan pertama dan kedua. Pada kedua garis ini dibuat suatu koridor untuk mendapatkan nilai koefisien pitch (Kongsberg, 2003).
Pitch memberikan pengaruh yang relatif kecil terhadap error yang ditimbulkan pada pemeruman (Godin, 1998). Ilustrasi mengenai koreksi terhadap pitch ketika melaksanakan survei hidrografi dapat dilihat pada gambar 6. Error yang ditimbulkan akibat kedalaman dan posisi akan lebih terlihat ketika jalur survei tegak lurus terhadap kemiringan perairan (slope) dan meningkat dengan bertambahnya kedalaman. Hal penting dari kalibrasi pitch yaitu pergantian jalur sepanjang sumbu-Y sebanding dengan kedalaman (Sasmita, 2008). Kalibrasi ini dapat ditulis secara matematis melalui sebuah persamaan yang dapat diformulasikan sebagai berikut :
dα = tan -1 d/2 ... (1)
z Keterangan :
dα = Pitch offset
z = Kedalaman (meter) d = Jarak pengukuran 1 dan 2
13
Gambar 6. Kalibrasi pitch (Mann, 1996)
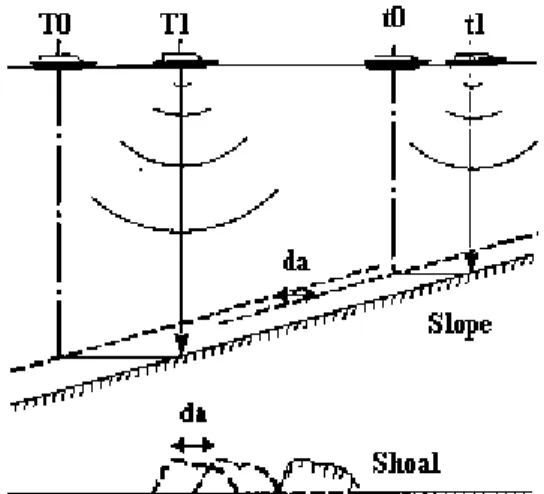
2.6.3 Kalibrasi Roll
Tujuan utama dari kalibrasi ini yaitu untuk mencari besarnya nilai
koefisien roll sehingga kedalaman yang terukur menjadi akurat. Kalibrasi ini dilakukan dengan cara membuat satu garis sapuan dari beam pada daerah dasar perairan yang relatif datar. Teknis pelaksanaan kalibrasi ini yaitu dengan melakukan pengambilan data kedalaman sebanyak dua kali secara bolak-balik dengan kecepatan yang sama (Gambar 7). Pada daerah ini dibuat satu koridor untuk memperoleh nilai koefisiennya.
14
Penentuan kalibrasi roll ini dapat diformulasikan secara matematis melalui persamaan : θ = tan -1 dz - da 2 ... (2) Keterangan : θ = Offset roll dz = Perbedaan kedalaman
da = Jarak jalur lintasan
2.6.4 Kalibrasi Time Delay
Dalam pelaksanaan survei batimeri menggunakan multibeam, pulsa suara yang dipancarkan dan mengenai dasar perairan akan dipantulkan kembali. Setiap beam yang berasal dari transducer memiliki satu nilai kedalaman. Data tersebut harus disesuaikan terhadap data posisi yang berasal dari DGPS. Tidak semua data hasil pemeruman (sounding) digunakan. Data multibeam yang digunakan adalah data yang berasal dari hasil filterisasi yang telah mengalami penyesuaian terhadap data posisi. Berdasarkan. Kalibrasi time delay atau yang lebih dikenal dengan kalibrasi waktu tunggu pada umumnya bernilai 0,2 sekon – 1 sekon. Perbedaan waktu pada koreksi ini akan menyebabkan kesalahan kalibrasi roll (Sasmita, 2008). Kalibrasi waktu tunggu ini bernilai akurat jika dapat dideteksi dalam 10-50 ms. Gambar 8 memperlihatkan kalibrasi dari waktu tunggu akibat adanya pengaruh kecepatan kapal dan slope. Kalibrasi ini dilakukan secara berulang-ulang sehingga diperoleh profil dengan perolehan perbedaan data yang minimum. Teknis pelaksaan kalibrasi ini dengan malintasi lajur yang sam pada slope kedalaman yang tajam dengan kecepatan kapal yang berbeda.
15
Gambar 8. Kalibrasi time delay (Mann,1996)
Formulasi yang dapat digunakan untuk melakukan perhitungan kalibrasi time delay adalah :
TD =
d
a ... (3)Vh - Vt Keterangan :
TD = Time Delay (s)
da = Slope pada kemiringan 1 dan 2 (meter)
Vh = Kecepatan kapal pada kemiringan terjal (m/s)
Vt = Kecepatan kapal pada kemiringan yang landai (m/s)
2.7 Sound Velocity Profile (SVP)
Sound Velocity Profile merupakan sebuah gambaran atau profil yang menggambarkan tingkat kecepatan rambat suara di perairan. Kecepatan suara sering disimbolkan dengan c. Nilai kecepatan rambat suara air laut berada antara 1450 m/s – 1540 m/s. Pengetahuan mengenai kondisi lingkungan air laut sangat penting untuk diketahui. Kecepatan suara akan meningkat dengan bertambahnya suhu, salinitas dan tekanan. Faktor-faktor tersebut memiliki hubungan yang
16
sangat kompleks untuk dibahas. Namun variasi nilai kecepatan rambat suara ini relatif kecil.
Kecepatan suara dapat diketahui secara langsung secara in-situ dengan menggunakan velocimeters atau dapat dikalkulasikan dengan menggunakan sebuah formula jika nilai temperatur (T), salinitas (S), dan tekanan hidrostatis (P) diketahui. Salah satu formulasi yang dapat digunakan untuk menghitung nilai kecepatan suara menurut Medwin (1998) yaitu:
c = 1449, 2 + 4.6T + 0,055T2 + 0,00029T3 + (1,34 – 0,010T) (S-35)
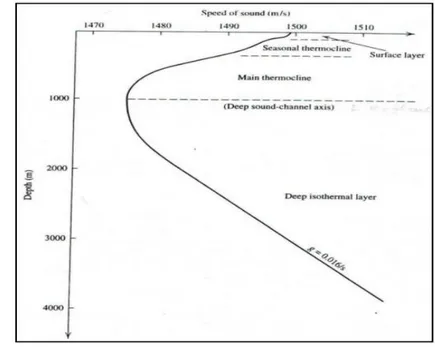
+0, 016Z ... (4) Kecepatan suara ini memiliki nilai yang bervariasi. Kinsler et al, (2000) membuat suatu profil kecepatan suara ketika berada di dalam kolom perairan. Perubahan kecepatan suara secara drastis terjadi pada palung laut atau berada pada lapisan thermocline. Hal ini dikarenakan pada lapisan tersebut terjadi perbedaan suhu yang signifikan. Gambar 9 menggambarkan profil kecepatan suara yang umumnya terjadi di perairan laut.
17
2.8 Differential Global Potitioning System (DGPS) SeaStar 8200VBS Penentuan posisi dapat diketahui melalui sebuah sistem yang berbasis satelit yang disebut GPS. Presisi atau keakuratan menjadi hal yang paling utama dalam sistem ini. Differential GPS merupakan salah satu sistem yang mampu memberikan informasi posisi dengan tingkat keakuratan yang tinggi (Seeber, 2003) Konsep DGPS dalam penentuan posisi yaitu dengan menggunakan stasiun pengamatan yang berada di darat atau yang disebut Reference station. Gambaran mengenai sistem kerja DGPS dapat dilihat pada gambar 10 dibawah ini
Sumber: http://muislife.com/survey-hidrografi-untuk-monitoring-alur-pelayaran.html
Gambar 10. Cara kerja sistem DGPS terhadap reference station
SeaStar 8200 VBS merupakan salah satu dari jenis DGPS. Jenis alat ini mampu memberikan ketelitian resolusi spasial dalam hitungan sentimeter. Pada sistem ini memiliki dua buah antena yang berfungsi sebagai penerima sinyal dari satelit, yang terdiri dari antena primer dan antena sekunder. Antena primer berfungsi sebagai penerima utama sinyal sedangkan antena sekuner berfungsi untuk menerima hasil koreksi yang berasal dari reference station. DGPS pada umumnya hanya sebuah teknik yang digunakan untuk meningkatkan keakuratan
18
penentuan posisi. Berdasakan akurasi yang ingin dicapai, DPGS terdiri dari beberapa klasifikasi, yaitu :
1. Ordinary GPS
2. Carier Smooth DGPS 3. Precise DGPS
Sistem yang bekerja pada DGPS ini pada umumnya sama dengan sistem GPS pada umumnya, namun yang berbeda adalah pada sistem DGPS ini terdapat satu satelit yang telah menjadi acuan dalam penentuan posisi. Satelit ini akan terus menerus memberikan informasi posisi pada SeaStar 8200 VBS.
2.9 Gunung Bawah Laut (Seamount) dan Dimensinya
Definisi mengenai gunung bawah laut (seamount) berkebang dari tahun ke tahun. Hal ini didasarkan pada sudut pandang disiplin ilmu yang digunakan oleh beberapa peneliti. Menurut Menard (1964), gunung bawah laut dapat
didefinisikan sebagai material yang membentuk sebuah ketinggian yang berada di dasar laut dengan bentuk yang bulat atau elips dengan ketinggian minimum1 kilometer dan memiliki kemiringan (slope) tertentu serta terdapat puncak yang berukuran kecil. Schieferdecker (1959) menyebutkan bahwa gunung bawah laut didefinisikan sebagai sebuah daerah di permukaan bumi dimana bahan magma dari dalam bumi keluar atau pernah keluar pada masa lampau, biasanya akan membentuk suatu gunung, berbentuk kerucut dan mempunyai kawah di bagian puncaknya . Secara bentang alam William dan McBirney (1979) membagi gunung yang berbentuk kerucut menjadi daerah puncak, lereng, kaki dan dataran sekitanrnya.
19
Berberapa faktor pembentukan gunung bawah laut menurut Spence and Turcotte (1985) terdiri dari beberapa proses. Pertama, material-material yang ada di bawah lapisan bumi memiliki asupan panas atau magma dari perut bumi
tepatnya di lapisan litosphere. Kedua, magma yang berasal dari dalam perut bumi memiliki energi yang cukup untuk terangkat ke atas tanpa adanya proses
pembekuan selama pembentukan tonjolan menyerupai gunung (Gass et al.,1978). Sebagian besar gunung bawah laut belum dapat diketahui keberadaannya, hal ini dikarenakan hanya sebagian kecil saja dari dasar laut yang berhasil
dipetakan oleh kapal yang melakukan survei kelautan. Perolehan data mengenai gunung api bawah laut (seamount) pada awalanya dilakukan hanya dengan menggunakan peta profil batimetri disuatu perairan. Mekanisme penentuan ini lebih sering dilakukan bila dibandingkan dengan harus melakukan interpolasi dari sebuah peta. Sekitar 90% gunung bawah laut dengan ketinggian kurang dari 1 kilometer tidak dapat terlihat atau teramati, hal ini dikarenakan gunung
tersebut terlihat hanya sebagai gundukan-gundukan kecil diantara gunung-gunung tinggi disekitarnya (Craig dan Sandwell, 1988).
Gunung laut di dunia dapat ditemukan pada semua cekungan di laut, dengan distribusi yang cukup bervariasi dalam ruang dan waktu, dan dapat ditemukan pada bagian kerak samudra. Hampir setengah dari gunung laut di dunia ditemukan pada Samudra Pasifik dan sisanya tersebar pada bagian Atlantik dan Samudera India. Menurut Encyclopedia of Earth, memperkirakan sebaran gunung laut di dunia berkisar 100.000 gunung laut yang memiliki ketinggian diatas 1000 meter, dan ribuan lainnya jika dihitung di bawah ketinggian 1000 meter. Perkiraan ini didasarkan dengan penggunaan satelit dengan memeriksa
20
altimetry anomali gravitasi di bawah permukaan laut (Gambar 10). Informasi terbaru berdasarkan hasil penelitian Yesson. C et al. pada tahun 2011, diperoleh data bahwa diseluruh dunia terdapat 33.452 gunung bawah laut (seamount) dan 138.412 bukit kecil.
Gambar 11. Peta penyebaran gunung bawah laut (seamount) dunia (Kitchingham dan Lai, 2004)
Harian Kompas yang terbit pada tanggal 28 Mei 2009 mencatat bahwa Indonesia memiliki beberapa Gunung api bawah laut, antara lain :
1. Gunung Submarine di Sulawesi Utara.
2. Gunung Mahangetang di Pulau Mahangetang.
3. Gunung Niuwewerker di perairan Banda, ditemukan pada tahun 1927. 4. Gunung Hobal, ditemukan pada tahun 1999 di perairan Nusa Tenggara. 5. Gunung Emperor of China di perairan Banda.
21
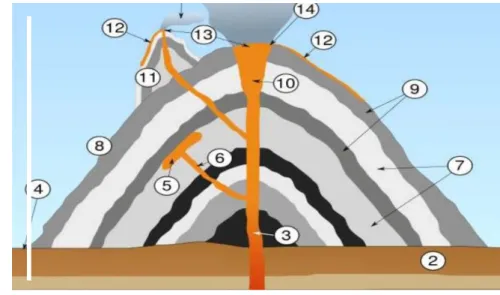
Sumber : http://unimak.us/landforms.shtml
Gambar 12. Morfologi gunung api. Keterangan :
1. Dapur magma 9. Lapisan Lava
2. Batuan Dasar 10. Kenpundan
3. Pipa Kawah 11. Kerucut Parasit Gunung Api 4. Permukaan Dasar 12. Aliran Lava
5. Retas (skill) 13. Kawah
6. Pipa Kawah Sekunder 14 Bibir Kawah 7. Lapisan Abu Gunung Api