BAB 2
TINJAUAN PUSTAKA
2.1 Sensor Suhu Termokopel tipe K
Termokopel yang digunakan pada penelitan ini menggunakan termokopel tipe K yang ditunjukkan pada gambar dibawah ini.
Gambar 2.1 Termokopel tipe K
Termokopel ini merupakan termokopel yang biasa digunakan dalam berbagai kegiatan industri. Selain harganya yang murah, termokopel ini juga mempunyai
jangkauan yang cukup tinggi. Pembaca sensor termokopel tipe K ini memiliki batas suhu antar -200 oC sampai +1200 oC. Termokopel ini berbahan dasar Chromel dan Alumel yang mempunyai sensitivitas rata-rata 41 µV/oC. (Data sheet acquired from Harris Semiconductor. 2010)
serta penggolongan dari termokopel sendiri sudah diatur oleh Instrument Society of America (ISA). Termokopel dibangun berdasarkan Asas Seeback dimana bila dua jenis logam yang berlainan disambungkan ini akan menjadi rangkaian tertutup sehingga perbedaan temperature pada sambungan akan menimbulkan beda potensial listrik pada kedua logam tersebut, selanjutnya akan dibaca oleh alat ukur temperatur. Termokopel dapat dihubungkan secara seri satu sama lain untuk membuat termopile, dimana tiap sambungan yang panas diarahkan ke suhu yang lebih tinggi dan semua sambungan dingin ke suhu yang lebih rendah. Dengan begitu, tegangan pada setiap termokopel menjadi naik, yang memungkinkan untuk digunakan pada tegangan yang lebih tinggi. Dengan adanya suhu tetapan pada sambungan dingin, yang berguna untuk pengukuran di laboratorium, secara sederhana termokopel tidak mudah dipakai untuk kebanyakan indikasi sambungan langsung dan instrumen kontrol. Mereka menambahkan sambungan dingin tiruan ke sirkuit mereka yaitu peralatan lain yang sensitif terhadap suhu (seperti termistor atau dioda) untuk mengukur suhu sambungan input pada peralatan, dengan tujuan untuk mengurangi gradiasi suhu di antara ujung-ujungnya. Di sini, tegangan yang berasal dari hubungan dingin yang diketahui dapat disimulasikan, dan koreksi yang baik dapat diaplikasikan. Hal ini dikenal dengan kompensasi
hubungan dingin. (Rachman Soleh dkk, 2012)
2.2Modul RS485
yaitu DE dan RE. Apabila kaki DE berlogika 0 dan RE berlogika 0, maka SN75176 berfungsi sebagai penerima data sedangkan bila kaki DE berlogika 1 dan RE berlogika 1 maka SN75176 berfungsi sebagai pengirim.
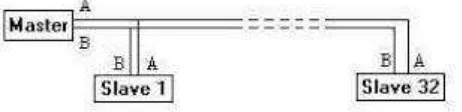
Gambar 2.2 Komunikasi Data Master dan 32 Slave
Sistem komunikasi dengan menggunakan RS485 ini dapat digunakan untuk komunikasi data antara 32 unit peralatan elektronik hanya dalam dua kabel saja. Selain itu, jarak komunikasi dapat mencapai 1,2 Km dengan digunakannya kabel AWG-24 twisted pair. Seperti yang ditunjukkan pada Gambar 2.2.
Agar komunikasi data pada sistem multipoint yang dapat digunakan untuk 32 unit peralatan elektronik tidak terjadi saling bentrok antar data, maka seperti layaknya pada forum diskusi yang benar, pada kondisi awal semua peserta menjadi pendengar terlebih dahulu. Kemudian pada saat salah seorang peserta diskusi berbicara, maka peserta yang lain harus menunggu peserta yang berbicara tersebut menyelesaikan pembicaraan. Apabila peserta tersebut selesai berbicara, maka peserta tersebut kembali menjadi pendengar sedangkan yang lain baru boleh berbicara untuk memberikan tanggapan atau mengajukan usul yang lain. Hal ini diperlukan agar forum diskusi dapat berjalan dengan baik dan tertib. Demikian pula pada komunikasi RS485, semua peralatan elektronik berada pada posisi penerima hingga salah satu memerlukan untuk mengirimkan data, maka peralatan
INPUT
peralatan tersebut harus menolak atau mengabaikan data tersebut. Namun bila Slave ID yang dikirimkan sesuai dengan ID dari peralatan elektronik yang menerima, maka data selanjutnya akan diambil untuk diproses lebih lanjut. (Delta-electronic, 2007).
Komunikasi serial RS485 menggunakan sepasang kabel untuk mengirimkan satu sinyal. Tegangan antara kedua kabel saluran selalu berlawanan. Logika ditentukan dari beda tegangan antara kedua kabel tersebut. SN75176 merupakan IC multipoint RS485 transceiver. Di dalam SN75176 terdapat sebuah driver dan receiver seperti pada Gambar 2.3.
Gambar 2.3 Bagan IC SN75176
SN75176 dapat mendukung 32 unit paralel dalam satu jalur. Sensitivitas tegangan input receiver 0,2 V dan jarak maksimum 4000 feet. Pada mode pengiriman (transmitting), kaki enable kirim DE diberi logika 1. Keluaran A dan B ditentukan oleh masukan driver D, dimana keluaran A akan sesuai dengan
logika driver D, sedangkan B berkebalikan. Jika input D berlogika 1, maka output A akan bertegangan 5 Volt dan output B 0 Volt. Sebaliknya jika input D
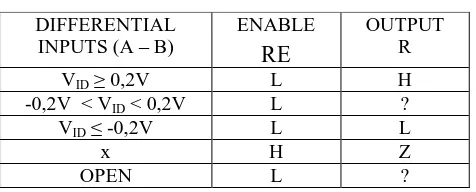
berlogika 0 maka output A bertegangan 0 Volt dan output B 5 Volt. Pada mode penerimaan (receiving), kaki enable terima RE diberi logika 0. Output receiver R ditentukan oleh tegangan diferensial antara input A dan B (VA - VB). Jika
tegangan diferensial VA - VB lebih besar dari +0,2 Volt, maka receiver R akan
berlogika 1, sedangkan jika VA - VB lebih kecil dari -0,2 Volt maka receiver R
akan berlogika 0. Untuk tegangan VA - VB antara -0,2 Volt sampai +0,2
Volt, maka level logika keluaran tidak terdefinisi. Mode pengiriman dan penerimaan data SN75176 ditunjukkan pada Tabel 2.1 dan 2.2.
DIFFERENTIAL
Jika terdapat gangguan listrik yang menimpa saluran transmisi, maka induksi tegangan gangguan akan diterima kedua kabel saluran sama besar. Karena
Receiver membandingkan selisih tegangan antara dua kabel saluran, maka induksi tegangan tidak akan berpengaruh pada output. Dengan kemampuan menangkal gangguan yang sangat baik ini, RS485 bisa dipakai untuk membangun saluran transmisi jarak jauh sampai 4000 feet dengan kecepatan tinggi. (Sivakumar, 2008).
Bus RS485 adalah mode transmisi balanced differential. Bus ini hanya
mempunyai dua sinyal, A dan B dengan perbedaan tegangan antara keduanya. Karena line A sebagai referensi terhadap B maka sinyal akan high bila mendapat
tersebut harus menolak atau mengabaikan data tersebut. Namun bila Slave ID yang dikirimkan sesuai dengan ID dari peralatan elektronik yang menerima, maka data selanjutnya akan diambil untuk diproses lebih lanjut.
Gambar 2.4 Grafik kecepatan transfer data vs panjang kabel data (T. Abdul, 2007) 2.2.1 MAX 232
Max232 merupakan salah satu perangkat yang berfungsi sebagai antarmuka (interfacing) komputer ke peralatan luar dengan pengiriman data secara serial (per bit). Recomended Standard Number 232 digunakan dengan data biner serial yang ditransmisikan untuk berkomunikasi dengan peralatan lain. Standar komunikasi Max232 adalah standard komunikasi serial paling umum digunakan terutama dalam komputer IBM PC dan peralatan lain yang kompatible. Komunikasi serial Max232 dijalankan dengan menggunakan perangkat standart yang berhubungan dengan dua tipe peralatan yaitu dataterminal equipment (DTE) dan data
communication terminating (DCE). Proses transfer data secara serial memerlukan penunjang peralatan lain untuk pengiriman data berupa DTE untuk masing-masing terminal. Pada prinsipnya proses pengiriman data dengan menggunakan serial interface sangat sederhana. Data ditransfer dikirim dari satu ke terminal ke terminal yang lain begitu pula sebaliknya. Proses data dari satu komputer ke komputer yang lain memerlukan jalur komunikasi data agar data dapat di terima
baik oleh penerima. Jalur ini dikenal dengan protokol. Protokol digunakan start bit, stop bit, parity bit dan sebagainya. Semua protokol komunikasi merupakan
Max232 merupakan kombinasi untai-untai yang paling popular karena tidak hanya menghubungkan terminal modem, tetapi juga digunakan untuk menghubungkan periferial ke terminal serta untuk menghubungkan piranti data pada sebuah gedung jika digunakan line driver dan line receiver sebagai penggganti modem. Karakteristik elektris yang dimilki EIA-232 menspesifikasikan bahwa untai-untai tak seimbang digunakan dengan tegangan positif antara +3 sampai +25V. Pada tegangan ini isyarat dikenal sebagai biner 0 atau ON atau space. Sedangkan tegangan -3 sampai -25 v menyatakan biner 1 dan keadaan OFF atau Mark. Sedangkan tegangan antara -3 sampai +3 V disebut sebagai daerah transisi yang besaran tegangannya tidak berlaku atau
invalid.(Rahmat, 2006).
2.3 Mikrokontroler
Mikrokontroler adalah suatu sistem komputer lengkap dalam satu chip. Lengkap dalam artian memiliki unit CPU, port I/O (paralel dan serial), timer, counter, memori RAM untuk penyimpanan data saat eksekusi program, dan memori ROM tempat dari mana perintah yang akan dieksekusi. Dan merupakan suatu komponen elektronik kecil yang mengendalikan operasi komponen elektronik lain pada suatu
sirkuit elektronik.
2.3.1 Mikrokontroler AVR Atmega 8535
Mikrokontroler ATmega 8535 merupakan mikrokontroler 8-bit teknologi CMOS dengan konsumsi daya rendah yang berbasis arsitektur enhanced RISC AVR. Dengan eksekusi intruki yang sebagian besar hanya menggunakan suatu siklus clock, ATmega 8535 mencapai throughput sekitar 1 MIPS per MHZ yang mengizinkan perancang sistem melakukan optimasi konsumsi daya verus kecepatan pemrosesan.
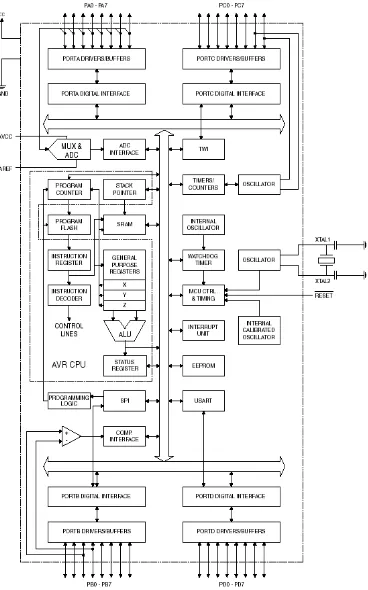
2.3.2 Arsitektur AVR ATmega 8535
siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. Selain itu AVR berteknologi RISC (Reduced Instruction Set Computing). Secara garis besar arsitektur mikrokontroler ATMega8535 memiliki bagian sebagai berikut :
1. Port I/O 32 bit, yang dikelompokkan dalam Port A, Port B, Port C dan Port D.
2. Analog to Digital Converter 10-bit sebanyak 8 input. 3. Timer/counter sebanyak 3 buah dengan compare mode. 4. CPU 8 bit yang terdiri dari 32 register.
5. SRAM sebesar 512 byte.
6. Memory Flash sebesar 8 Kbyte dengan kemampuan read while write. 7. Interupsi Internal maupun eksternal.
8. Port Komunikasi SPI.
9. EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 10.Analog Comparator.
11.Komunikasi serial standar USART dengan kecepatan maksimal 2,5 Mbps. Frekuensi clock maksimum 16 MHz.
12.PORT USART untuk komunikasi serial.
Media penyimpan program berupa flash memory, sedangkan penyimpan
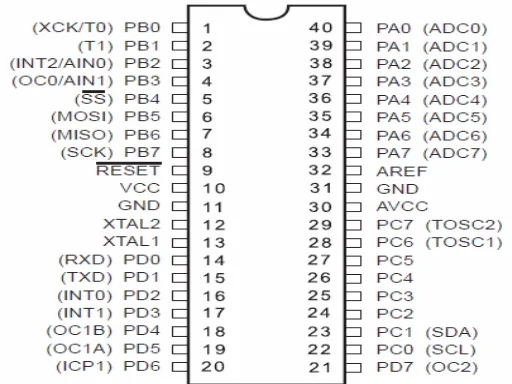
2.3.3 Konfigurasi pin Mikrokontroler ATmega 8535
Di bawah merupakan konfigurasi pin mikrokontroler AVR ATmega 8535 yaitu : 1. VCC : merupakan pin yang berfungsi sebagai masukan pin catu
daya.
2. GND : merupakan pin ground.
3. Port A (PA0..PA7 : merupakan pin I/O dua arah dan pin masukan ADC.
4. Port B (PB0..PB7) : merupakan pin I/O dua arah dan pin fungsi khusus, yaitu timer/counter, komparator analog dan SPI.
5. Port C (PC0..PC7) : merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog, input ADC dan Timer
Oscilator.
6. Port D (PD0..PD7) : merupakan pin I/O dua arah dan pin fungsi khusus yaitu komparator analog, interupsi eksternal dan komunikasi serial.
7. RESET : merupakan pin yang digunakan untuk mereset mikrokontroler.
8. XTAL1 dan XTAL2 : merupakan pin masukan clock eksternal.
9. AVCC : merupakan pin masukan tegangan untuk ADC. 10.AREF : merupakan pin masukan tegangan referensi ADC.
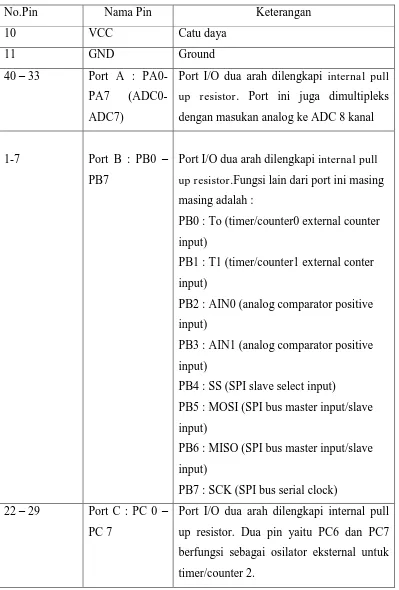
2.3.4 Deskripsi pin-pin pada Mikrokontroler ATMega8535
Untuk keterangan lebih lanjut dibawah ini merupakan sebuah tabel yang menjelaskan konfigurasi pin mikrokontroler ATmega 8535 secara rinci, yaitu:
Tabel 2.3 Deskripsi pin-pin AVR ATmega8535 dengan masukan analog ke ADC 8 kanal
1-7 Port B : PB0 – PB7
Port I/O dua arah dilengkapi internal pull up resistor.Fungsi lain dari port ini masing masing adalah :
PB4 : SS (SPI slave select input)
PB5 : MOSI (SPI bus master input/slave input)
PB6 : MISO (SPI bus master input/slave input) berfungsi sebagai osilator eksternal untuk
14-21 Port D : PD0 – PD7
Port I/O dua arah dilengkapi internal pull up resistor. Fungsi lain dari port ini masing masing adalah :
PD0 : RXD (UART input line) PD1 : TXD (UART input line)
PD2 : INT0 (eksternal interrupt 0 input) PD3 : INT 1 (eksternal interrupt 1 input) PD4 : OC1B ( timer/counter 1 output compare B match input)
PD5 : OC1A ( timer/counter 1 output compare A match input)
PD6 : ICP (timer/counter1 input capture pin)
PD7 : OC2 (timer/counter2 output compare match output)
9 RESET Masukan reset. Sebuah reset terjadi jika pin ini diberi logika low melebihi periode minimum yang diperlukan.
13 XTAL 1 Masukan ke inverting oscillator amplifier dan masukan ke rangkaian internal clock.
12 XTAL 2 Keluaran dari inverting oscillator amplifier
30 AVCC Catu daya untuk port A dan ADC
31 AGND Analog Ground
32 AREF Refrensi masukan analog untuk ADC
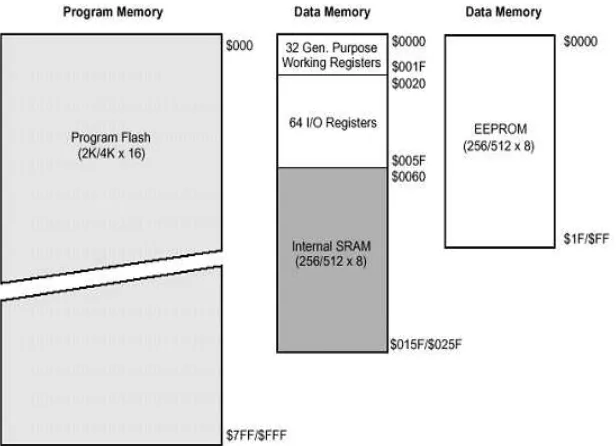
2.3.5 Peta Memori ATmega 8535
dilengkapi dengan EEPROM (Electrical Erasable Programmable Read Only Memory) untuk penyimpanan data tambahan yang bersifat non-volatile. Memori EEPROM ini mempunyai lokasi yang terpisah dengan sistem register alamat, register data dan register kontrol yang dibuat khusus untuk EEPROM.
2.3.5.1 Memori Program dan Data
Mikrokontroler ATmega 8535 memiliki On-Chip In-System Reprogrammable Flash Memory untuk menyimpan program. Untuk alasan keamanan, memori program dibagimenjadi dua bagian yaitu (1) Boot Flash Section dan (2) Application Flash Section. Boot Flash Section digunakan untuk meyimpan program Boot Loade, yaitu program yang harus dijalankan pada saat AVR reset atau pertama kali diaktifkan. Application Flash Section digunakan untuk menyimpan progam aplikasi yang dibuat pengguna. Mikrokontroler AVR tidak dapat menjalankan program aplikasi ini sebelum menjalankan Boot Loader. Besarnya memori Boot Flash Section dapat diprogram dari 128 word sampai 1024
word tergantung setting pada konfigurasi bit di-register BOOTSZ. Jika Boot Loader diproteksi, maka program pada Application Flash Section juga sudah aman.
Memori data dibagi menjadi tiga yaitu :
1. Terdapaat 32 register keperluan umum (general purpose register_GPR
biasa disebut register file di dalam teknologi RISC)
2. Terdapat 64 register untuk keperluan input/output (I/O register)
Gambar 2.7 Memori AVR ATmega8535
2.3.6 Status Register
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Gambar 2.8 Status Register
1. Bit7 I (Global Interrupt Enable), Bit harus di Set untuk meng-enable semua jenis interupsi.
2. Bit6 T (Bit Copy Storage), Instruksi BLD dan BST menggunakan bit T sebagai sumber atau tujuan dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit T menggunakan instruksi BST, dan sebaliknya bit T dapat disalin kembali kesuatu bit dalam register GPR
4. Bit4 S (Sign Bit) merupakan hasil operasi EOR antara flag –N (negative) dan flag V (complement overflow).
5. Bit3 V (Two’s Component Overflow Flag) Bit ini berfungsi untuk
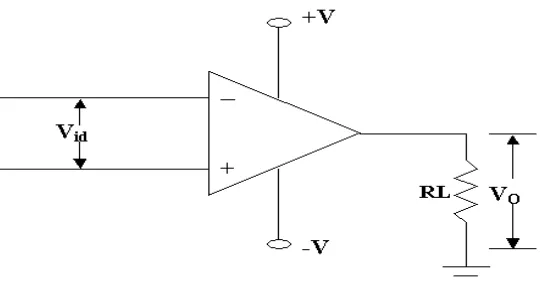
Penguat operasional (Operational amplifier) atau yang biasa disebut op-amp merupakan suatu komponen elektronika berupa sirkuit terintegrasi (integrated circuit atau IC) yang terdiri atas bagian differensial amplifier, common emiter amplifier dan bagian push-pull amplifier. Bagian output Op-amp ini biasanya dikendalikan dengan umpan balik negatif (negative feedback) karena
nilai gain-nya yang tinggi. Keuntungan dari penggunaan Op Amp adalah karena komponen ini memiliki penguatan (A) yang sangat besar, Impedansi
Gambar 2.9 Simbol Penguat Operasional
2.4.1 Karakteristik Ideal Penguat Operasional
Penguat operasional banyak digunakan dalam berbagai aplikasi karena beberapa keunggulan yang dimilikinya, seperti penguatan yang tinggi, impedansi masukan yang tinggi, impedansi keluaran yang rendah dan lain sebagainya. Berikut ini adalah karakteristik dari Op Amp ideal:
a. Penguatan tegangan lingkar terbuka (open-loop voltage gain) AVOL = - ∞
b. Tegangan ofset keluaran (output offset voltage) VOf = 0
c. Hambatan masukan (input resistance) R I = ∞
d. Hambatan keluaran (output resistance) RO = 0
e. Lebar pita (band width) BW = ∞
f. Waktu tanggapan (respon time) = 0 detik g. Karakteristik tidak berubah dengan suhu
Kondisi ideal tersebut hanya merupakan kondisi teoritis, yang tidak mungkin dapat dicapai dalam kondisi praktis. Tetapi para pembuat Op Amp berusaha
untuk membuat Op Amp yang memiliki karakteristik mendekati kondisi-kondisi di atas. Karena itu sebuah Op Amp yang baik harus memiliki karakteristik yang mendekati kondisi ideal. Berikut ini akan dijelaskan satu persatu tentang kondisi-kondisi ideal dari Op Amp.
2.4.1.1 Penguatan Tegangan Lingkar Terbuka
penguatan tegangan lingkar terbuka adalah:
AVOL = v0 / Vin = - ∞ (2.1)
AVOL = V0 / (V1 – V2) = - ∞ (2.2)
Tanda negatif menandakan bahwa tegangan keluaran VO berbeda fasa dengan
tegangan masukan Vin . Konsep tentang penguatan tegangan tak berhingga
tersebut sukar untuk divisualisasikan dan tidak mungkin untuk diwujudkan. Suatu hal yang perlu untuk dimengerti adalah bahwa tegangan keluaran VO jauh
lebih besar daripada tegangan masukan Vin . Dalam kondisi praktis, harga
AVOL adalah antara 5000 (sekitar 74 dB) hingga 100000 (sekitar 100 dB).
Tetapi dalam penerapannya tegangan keluaran VO tidak lebih dari tegangan catu
yang diberikan pada Op Amp. Karena itu Op Amp baik digunakan untuk menguatkan sinyal yang amplitudonya sangat kecil.
2.4.1.2 Tegangan Ofset Keluaran
Tegangan ofset keluaran (output offset voltage) VOf adalah nilai tegangan
keluaran dari Op Amp terhadap tanah (ground) pada kondisi tegangan masukan Vin = 0. Secara ideal, nilai VOf = 0 Volt. Op Amp yang dapat
memenuhi nilai tersebut disebut sebagai Op Amp dengan CMR (common mode rejection) ideal. Tetapi dalam kondisi praktis, akibat adanya ketidakseimbangan dan ketidakidentikan dalam penguat diferensial dalam Op Amp tersebut, maka tegangan ofset VOf biasanya bernilai sedikit di atas 0 Volt. Apalagi tidak
digunakan umpan balik maka nilai VOf akan menjadi cukup besar untuk
menimbulkan kejenuhan (saturasi) pada keluaran. Untuk mengatasi hal ini, maka perlu diterapkan tegangan koreksi pada Op Amp. Hal ini dilakukan agar pada saat tegangan masukan Vin = 0, tegangan keluaran VO = 0.
2.4.1.3 Hambatan Masukan
Hambatan masukan (input resistance) Ri dari Op Amp adalah besar hambatan
Nilai ini biasanya diukur pada kondisi Op Amp tanpa umpan balik. Apabila suatu umpan balik negative (negative feedback) diterapkan pada Op Amp, maka hambatan masukan Op Amp akan meningkat. Dalam suatu penguat, hambatan masukan yang besar adalah suatu hal yang diharapkan. Semakin besar hambatan masukan suatu penguat, semakin baik penguat tersebut dalam menguatkan sinyal yang amplitudonya sangat kecil. Dengan hambatan masukan yang besar, maka sumber sinyal masukan tidak terbebani terlalu besar.
2.4.1.4 Hambatan Keluaran
Hambatan Keluaran (output resistance) RO dari Op Amp adalah besarnya
hambatan dalam yang timbul pada saat Op Amp bekerja sebagai pembangkit sinyal. Secara ideal nilai hambatan keluaran RO Op Amp adalah = 0.
Apabila hal ini tercapai, maka seluruh tegangan keluaran Op Amp akan timbul pada beban keluaran (R L), sehingga dalam suatu penguat, hambatan
keluaran yang kecil sangat diharapkan. Dalam kondisi praktis nilai hambatan keluaran Op Amp adalah antara beberapa ohm hingga ratusan ohm pada kondisi tanpa umpan balik. Dengan diterapkannya umpan balik, maka nilai hambatan keluaran akan menurun hingga mendekati kondisi ideal.
2.4.1.5 Lebar Pita
Lebar pita (band width) BW dari Op Amp adalah lebar frekuensi tertentu dimana
tegangan keluaran tidak jatuh lebih dari 0,707 dari nilai tegangan maksimum pada saat amplitudo tegangan masukan konstan. Secara ideal Op Amp memiliki lebar pita yang tak terhingga. Tetapi dalam penerapannya, hal ini jauh dari kenyataan. Sebagian besar Op Amp serba guna memiliki lebar pita hingga 1 MHz dan biasanya diterapkan pada sinyal dengan frekuensi beberapa kiloHertz. Tetapi ada juga Op Amp yang khusus dirancang untuk bekerja pada frekuensi beberapa MegaHertz. Op Amp jenis ini juga harus didukung komponen eksternal yang dapat mengkompensasi frekuensi tinggi agar dapat bekerja dengan baik.
2.4.1.6 Waktu Tanggapan
keluaran untuk berubah setelah masukan berubah. Secara ideal nilai waktu respon Op Amp adalah = 0 detik, yaitu keluaran harus berubah langsung pada saat masukan berubah. Tetapi dalam prakteknya, waktu tanggapan dari Op Amp memang cepat tetapi tidak langsung berubah sesuai masukan. Waktu tanggapan Op Amp umumnya adalah beberapa mikro detik hal ini disebut juga slew rate. Perubahan keluaran yang hanya beberapa mikrodetik setelah perubahan masukan tersebut umumnya disertai dengan overshoot yaitu lonjakan yang melebihi kondisi tunak (steady state). Tetapi pada penerapan biasa, hal ini dapat diabaikan.
2.4.2 Implementasi Penguat Operasional
Rangkaian yang akan dijelaskan dan dianalisa dalam tulisan ini akan
menggunakan penguat operasional yang bekerja sebagai komparator dan sekaligus bekerja sebagai penguat. Berikut ini adalah konfigurasi Op Amp yang
bekerja sebagai penguat:
Gambar 2.10 Penguat Noninverting Sederhana
Gambar di atas adalah gambar sebuah penguat non inverting. Penguat tersebut dinamakan penguat noninverting karena masukan dari penguat tersebut adalah masukan noninverting dari Op Amp. Sinyal keluaran penguat jenis ini sefasa dengan sinyal keluarannya. Adapun besar penguatan dari penguat ini dapat dihitung dengan rumus:
AV = (R1+R=2)/R1 (2.3)
AV = 1 + R2 / R1 (2.4)
Sehingga :
Selain penguat noninverting, terdapat pula konfigurasi penguat inverting. Dari penamaannya, maka dapat diketahui bahwa sinyal masukan dari penguat jenis ini,diterapkan pada masukan inverting dari Op Amp, yaitu masukan dengan tanda
“−“. Sinyal masukan dari pengaut inverting berbeda fasa sebesar 180o dengan sinyal keluarannya. Jadi jika ada masukan positif, maka keluarannya adalah negatif. Berikut ini adalah skema dari penguat inverting:
Gambar 2.11 Penguat Inverting Sederhana
Penguatan dari penguat di atas dapat dihitung dengan rumus:
AV = − R2 / R1 (2.6)
Sehingga:
VO = − ( R2 /R1 )Vi (2.7)