BAB 2
LANDASAN TEORI
Bab kedua dari penelitian ini akan membahas tentang teori-teori pendukung dan
penelitian sebelumnya yang berhubungan dengan OpenCVdan penerapannya.
2.1 Computer Vision
Computer Vision adalah ilmu dan teknologi mesin yang melihat, dimana “lihat” dalam hal ini berarti bahwa mesin mampu mengekstrak informasi dari gambar yang
diperlukan untuk menyelesaikan tugas tertentu. Sebagai suatu disiplin ilmu, visi
komputer berkaitan dengan teori di balik sistem buatan yangmengekstrak informasi
dari gambar. Data gambar dapat mengambil banyak bentuk, seperti urutan video,
pandangan dari beberapa kamera, atau data multi-dimensi dari scanner medis.
Menurut Sockman dan Saphiro (2000) ,Computer Vision adalah “To make
useful decisions about real physical objects and scenes based on sensed images”. sedangkan menurut Forsyth and Ponce: “Extracting descriptions of the world from
pictures or sequences of pictures”.
Computer Vision adalah kombinasi antara Pengolahan Citra dan Pengenalan Pola. Pengolahan Citra (Image Processing) merupan bidang yang berhubungan dengan
proses transformasi citra/gambar (image). Proses ini bertujuan untuk mendapatkan
kualitas citra yang lebih baik. Sedangkan Pengenalan Pola (Pattern Recognition),
bidang ini berhungan dengan proses indenfikasi obyek pada citra atau interpretasi
citra. Proses ini bertujuan untuk mengekstrak informasi/pesan yang disampain oleh
gambar citra.
Fungsi / Proses pada Computer Vision :Untuk menunjang tugas Computer
2.1.1 Proses penangkapan citra (Image Acquisition)
Image Acqusition pada manusia dimulai pada mata, kemudian informasi visual diterjemahkan de dalam suatu format yang kemudian dapat dimanipulasi oleh
otak.Senada dengan proses diatas, computer vision membutuhkan sebuah mata untuk
menangkap sebuah sinyal visual.Umumnya mata pada computer vision adalah sebuah
kamera video.Kamera menerjemahkan sebuah scane atau image.Keluaran dari kamera
ini adalah berupa sinyal analog, dimana frekuensi dan amplitudonya (frekuensi
berhubungan dengan jumlah sinyal dalam satu detik, sedangkan amplitudo berkaitan
dengan tingginya sinyal listrik yang dihasilkan) merepresentasikan detail ketajaman
(brightness) pada scene.
Kamera mengamati sebuah kejadian pada satu jalur dalam satu waktu,
memindainya dan membaginya menjadi ratusan garis horizontal yang sama.Tiap-tiap
garis membuat sebuah sinyal analog yang amplitudonya menjelaskan perubahan
brightness sepanjang garis sinyal tersebut.
Kemudian sinyal listrik ini diubah menjadi bilangan biner yang akan digunakan
oleh komputer untuk pemprosesan.Karena komputer tidak bekerja dengan sinyal
analog, maka sebuah analog-to-digital converter (ADC), dibutuhkan untuk
memproses semua sinyal tersebut oleh komputer.ADC ini akan mengubah sinyal
analog yang direpresentasikan dalam bentuk informasi sinyal tunggal kedalam sebuah
aliran (stream) sejumlah bilang biner.Bilangan biner ini kemuudian disimpan didalam
memori dan akan menjadi data raw yang akan diproses.
2.1.2 Proses pengolahan citra (Image Processing)
Tahapan berikutnya computer vision akan melibatkan sejumlah manipulasi utama
(initial manipulation) dari data binary tersebut,Image processing membatu
peningkatan dan perbaikan kualitas image, sehingga dapat dianalisa dan di olah lebih
jauh secara lebih efisien.Image processing akan meningkatkan perbandingan sinyal
2.1.3 Analisa data citra (Image Analysis)
Image analysisakan mengeksplorasi scane ke dalam bentuk karateristik utama dari objek melalui suatu proses intvestigasi.Sebuah program komputer akan mulai melihat
melalui bilangan biner yang merepresentasikan informasi visual untuk
mengidentifikasi fitur-fitur spesifikasi dan karekteristiknya.Lebih khusus lagi program
image analysis digunakan untuk mencari tepi dan batas-batasan objek dalam image.Sebuah tepian (edge) berbentuk antara objek dan latar belakangnya atau antara
dua objek yang spesifik.Tepi ini akan terdeteksi sebagai akibat dari perbedaan level
brightness pada sisi yang berbeda dengan salah satu batasnya.
2.1.4 Proses pemahaman data citra (Image Recoginition)
Ini adalah langkah terakhir dalam proses computer vision, yang mana spesifik
objek dan hubungannya diidentifikasi.Pada bagian ini akan melibatkan kajian tentang
teknik-teknik artificial interlligent.Recognition berkaitan dengan tamplate matching
yang ada dalam sebuah tulisan scene.Metode ini menggunakan program pencarian
(search program) dan teknik penyesuaian pola (pattern matching techniques).
2.2 Augmented Reality
Menurut Azuma (1997) Augmented Reality (AR) adalah variasi dari Virtual
Environment (VE), atauVirtual Reality lebih sering disebut.Teknologi VE benar-benar memasukkan atau mengenggelamkan pengguna sepenuhnya kedalam lingkungan
sintetis atau buatan. Sementara pengguna berada didalam lingkungan virutal ,
pengguna tidak dapat melihat nyatadunia di sekelilingnya. Sebaliknya, AR
memungkinkan pengguna untuk melihat dunia nyata, dengan objek virtual yang telah
disisipkan atau ditambahkan dengan dunia nyata.Menurut penjelasan (Hallerdan
Thomas, 2007), riset Augmented Reality bertujuan untuk mengembangkan teknologi
yang memperbolehkan penggabungan secara real-time terhadap digital content yang
dibuat oleh komputer dengan dunia nyata. Augmented Reality memperbolehkan
pengguna melihat objek maya dua dimensi atau tiga dimensi yang diproyeksikan
terhadap dunia nyata. (Emerging Technologies of Augmented Reality: Interfaces and
Teknologi AR ini dapat menyisipkan suatu informasi tertentu ke dalam dunia
maya dan menampilkannya di dunia nyata dengan bantuan perlengkapan seperti
webcam, komputer, HP Android, maupun kacamata khusus.User ataupun pengguna
didalam dunia nyata tidak dapat melihat objek maya dengan mata telanjang, untuk
mengidentifikasi objek dibutuhkanperantara berupa komputer dan kamera yang
nantinya akan menyisipkan objek maya ke dalam dunia nyata.Ada terdapat 2 metode
yang dikembangkan pada Augmented Reality saat ini yaitu ,Marker Based Tracking
dan Markless Augmented Reality.:
• Marker Augmented Reality (Marker Based Tracking)
Marker biasanya merupakan ilustrasi hitam dan putih persegi dengan batas hitam tebal
dan latar belakang putih. Komputer akan mengenali posisi dan orientasi marker dan
menciptakan dunia virtual 3D yaitu titik (0,0,0) dan tiga sumbu yaitu X, Y, dan Z.
Marker Based Tracking ini sudah lama dikembangkan sejak 1980-an dan pada awal
1990-an mulai dikembangkan untuk penggunaan Augmented Reality.
• Markerless Augmented Reality
Salah satu metode Augmented Reality yang saat ini sedang berkembang adalah
metode Markerless Augmented Reality, dengan metode ini pengguna tidak perlu lagi menggunakan sebuah marker untuk menampilkan elemen-elemen digital, dengan tool
yang disediakan Qualcomm untuk pengembangan Augmented Reality berbasis mobile
device, mempermudah pengembang untuk membuat aplikasi yang markerless (Qualcomm, 2012).
Seperti yang saat ini dikembangkan oleh perusahaan Augmented Reality
terbesar di dunia Total Immersion dan Qualcomm, mereka telah membuat berbagai macam teknik Markerless Tracking sebagai teknologi andalan mereka, seperti Face
Tracking, 3D Object Tracking, dan Motion Tracking.
2.3 Citra Digital
Citra digital adalah citra dua dimensi yang dapat ditampilkan pada layar monitor
komputer sebagai himpunan berhingga (diskrit) nilai digital yang disebut pixel (picture
elements). Pixel adalah elemen citra yang memiliki nilai yang menunjukkan intensitas warna. Berdasarkan cara penyimpanan atau pembentukannya, citra digital dapatdibagi
dalam array dua dimensi.Citra jenis ini disebut citra bitmap atau citra raster.Jenis citra
yang kedua adalah citrayang dibentuk oleh fungsi-fungsi geometri dan
matematika.Jenis citra ini disebutgrafik vektor.Citra digital (diskrit) dihasilkan dari
citra analog (kontinu) melalui digitalisasi.Digitalisasi citra analog terdiri sampling
danquantitazion.Sampling adalah pembagian citra ke dalam elemen-elemen diskrit
(pixel), sedangkan quantitazion adalah pemberian nilai intensitaswarna pada setiap
pixel dengan nilai yang berupa bilangan bulat (Awcock,1996).
2.4 Pengolahan Citra Digital
Pengolahan citra merupakan teknik manipulasi citra secara digital yang khususnya
menggunakan komputer, menjadi citra lain yang sesuai untuk digunakan dalam
aplikasi tertentu. Agar mudah diinterpretasi oleh manusia atau komputer, pengolahan
citra harus dilakukan dengan berbagai macam metode untuk mencapai citra sesuai
yang diinginkan.Operasi pengolahan citra digital umumnya dilakukan dengan tujuan
memperbaiki kualitas suatu gambar sehingga dapat dengan mudah diinterpretasikan
oleh mata manusia dan untuk mengolah informasi yang ada pada suatu gambar untuk
kebutuhan identifikasi objek secara otomatis.
2.4.1 Gray-Scaling
Proses awal yang banyak dilakukan dalam image processing adalah mengubah citra
berwarna menjadi citra gray-scale, hal ini digunakan untukmenyederhanakan model
citra. Seperti telah dijelaskan di depan, citra berwarna terdiri dari 3 layer matrik yaitu
R- layer, G-layer dan B-layer. Sehingga untuk melakukan proses-proses selanjutnya tetap diperhatikan tiga layer di atas. Bila setiap proses perhitungan dilakukan
menggunakan tiga layer, berarti dilakukan tiga perhitungan yang sama. Sehingga
konsep itu diubah dengan mengubah 3 layer di atas menjadi 1 layer matrik gray-scale
dan hasilnya adalah citra gray-scale.Dalam citra ini tidak ada lagi warna, yang ada
adalah derajat keabuan.
Untuk mengubah citra berwarna yang mempunyai nilai matrik masing-masing
r, g dan b menjadi citra gray-scale dengan nilai s, maka konversi dapat dilakukan
dengan mengambil rata-rata dari nilai r, g dan b sehingga dapat dituliskan menjadi:
Keterangan:
I (x,y) = nilai intensitas citra grayscale
R (x,y) = nilai intensitas warna merah dari citra asal
G (x,y) = nilai intensitas warna hijau dari citra asal
B (x,y) = nilai intensitas warna biru dari citra asal
Atau dapat menggunakan persamaan:
I = ( 0,299 x R(x,y)) + ( 0,587 x G(x,y)) + (0,144 x B(x,y)) ……… (2.2)
(Taylor dan Francis Group, 2007)
2.4.2 Thresholding
Thresholding merupakan konversi citra berwarna ke citra biner yang dilakukan dengan cara mengelompokkan nilai derajat keabuan setiap pixel kedalam 2 kelas, hitam dan
putih. Pada citra hitam putih terdapat 256 level, artinya mempunyai skala “0” sampai
“255” atau [0,255], dalam hal ini nilai intensitas 0 menyatakan hitam, dan nilai
intensitas 255 menyatakan putih, dan nilai antara 0 sampai 255 menyatakan warna
keabuan yang terletak antara hitam dan putih (Munir, 2004).
Pada operasi pengambangan, nilai intensitas pixel dipetakan ke salah satu dari dua nilai, α₁atau α₂, berdasarkan nilai ambang (threshold) T dapat ditunjukkan seperti pada persamaan 2.3
��, ′= α₁,f x,y <�α₂,f x,y ≥T ……….………....(2.3)
Jika α₁= 0 dan α₂ = 1, maka operasi pengambangan mentransformasikan citra hitam-putih ke citra biner. Dengan kata lain, nilai intensitas pixel semula dipetakan ke dua
nilai saja: hitam dan putih. Nilai ambang yang dipakai dapat berlaku untuk
keseluruhan pixel atau untuk wilayah tertentu saja (berdasarkan penyebaran nilai
intensitas pada wilayah tersebut) (Munir, 2004).Thresholding merupakan salah satu
teknik segmentasi yang baik digunakan untuk citra dengan perbedaan nilai intensitas
yang signifikan antara latar belakang dan objek utama.Dalam pelaksanaannya
thresholding membutuhkan suatu nilai yang digunakan sebagai nilai pembatas antara objek utama dengan latar belakang, dan nilai tersebut dinamakan dengan
Gambar 2.1. Citra hasil segementasi (Rahman ,S U et al.2014)
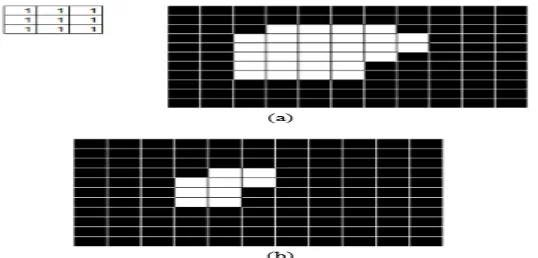
2.4.3 Erosion
Operasi erosi adalah operasi morfologi untuk mengurangi area foreground.Efek dari
operasi ini adalah menyusutkan foreground.Foreground berkurang dari tepi luar ke
dalam wilayahnya. Jika ada lubang di dalam area foreground, maka lubang akan
membesar. Proses ini menggunakan penataan elemen (structuring element) dan hal itu
dilakukan dengan operasi konvolusi antara gambar dan structuring element. Operasi
ini adalah untuk gambar biner. Proses erosi akan mengatur pixelforeground menjadi
background jika ada bagian dari structuring element yang mencapai latar belakang saat tengah structuring element mencapai tepi foreground. Gambar 2.2 memberikan
ilustrasi dari proses erosi dengan contoh structuring element 3 x 3.
Gambar 2.2 (a) penataan element dan gambar sebelum operasi; (b) hasiloperasi erosi (Naser dan Nanik, 2013)
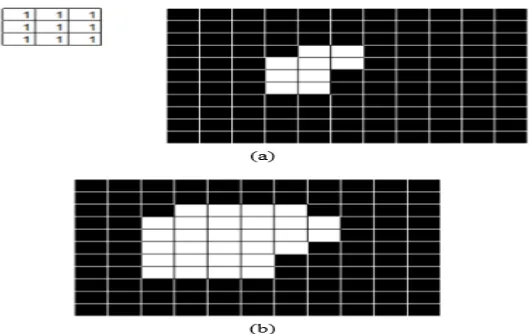
2.4.4 Dilation
operasi dilasi adalah operasi kebalikan dari erosi. erosi adalah untuk mengurangi latar
luarnya. Jika ada lubang di dalam foreground, maka lubang menyusut. Sama seperti
erosi, operasi dilasi menggunakan elemen struktural.Elemen struktural digunakan
dalam konvolusi dengan gambar.Proses dilasi akan mengatur pixel background untuk
menjadi latar depan jika ada bagian dari elemen penataan yang mencapai foreground
ketika pusat dari elemen penataan masih di daerah background. Gambar 2.3
memberikan gambaran tentang proses dilasi dengan contoh elemen 3 x 3 penataan.
Gambar 2.3 (a) penataan element dan gambar sebelum operasi; (b) hasil operasi dilasi (Naser dan Nanik , 2013)
2.4.5 Contour
Sebuah kontur adalah kurva untuk fungsi dua variabel bersama yang fungsinya
memiliki nilai konstan. Sebuah kontur menggabungkan poin-poin di atas tingkat
tertentu dan ketinggian yang sama. Sebuah peta kontur menggambarkan kontur
menggunakan garis kontur, yang menunjukkan kecuraman lereng dan lembah dan
bukit-bukit.gradien fungsi ini selalu tegak lurus dengan garis kontur. Ketika garis yang
berdekatan, besarnya gradien biasanya sangat besar. Kontur –kontur adalah berupa
garis lurus atau kurva yang menggambarkan persimpangan satu atau lebih bidang
horisontal dengan permukaan nyata atau hipotetis. (Implementation of Hand Detection
based Techniques for Human Computer Interaction ,Amiraj Dhawan, Vipul Honrao).
Gambar 2.4 Contour(Amiraj dan Vipul, 2013)
2.4.6 Convex-hull
Convex hull digambarkan secara sederhana dalam sebuah bidang sebagai pencarian subset dari himpunan titik pada bidang tersebut, sehingga jika titik-titik tersebut
dijadikan poligon maka akan membentuk poligon yang konveks. Suatu poligon
dikatakan konveks jika garis yang menghubungkan antar kedua titik dalam poligon
tersebut tidak memotong garis batas dari poligon.Convex hull suatu obyek P
didefinisikan sebagai area poligon convex terkecil yang melingkupi P. Oleh karena itu,
untuk suatu himpunan titik N {p0, p1, p2, . . . , pN}ϵ P, maka dapat dinyatakan bahwa
hull H dapat disusun dengan M titik dari himpunan N untuk membuat suatu area
konveks poligon minimum.Dari Gambar.2.3 dapat dinyatakan bahwa Convex hull
dibuat dengan mengambil sudut interior θ, dari tiga titik yang bersebelahan {p1, p0, p9}. Jika θ > π maka p0 dianggap sebagai titik refleks dan p0 bukan anggota M. Himpunan akhir H adalah {p1, p9, p7, p5, p3}.(Alif Muqtadiret al, 2013).
2.4.7 Convexity Defects
Convex hull dari kontur lengan bawah dihitung untuk mendapatkan convexity defects dari kontur. Convexity defects menyediakan informasi yang sangat berguna untuk
memahami bentuk kontur. Banyak karakteristik dari kontur yang rumit dapat
digambarkan dengan convexity defects.Pada pembahasan sebelumnya, dijelaskan
bahwa titik-titik yang membentuk convex hull harus merupakan bagian dari kontur.
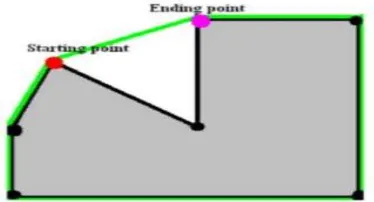
Langkah pertama dalam mencari convexity defects adalah menemukan titik awal
(starting point) dari convexity defects pada kontur. Titik awal convexity defects adalah
sebuah titik pada kontur yang juga termasuk dalam titik-titik convex hull, tapi titik selanjutnya pada kontur tidak termasuk dalam titik-titik convex hull. Gambar 2.6 menjelaskan titik awal dari convexity defects.Kontur dicari dengan jalur searah jarum
jam.Titik merah adalah titik pertama yang termasuk dalam convex hull, tapi titik
selanjutnya tidak termasuk dalam convex hull.Setelah definisi titik awal diketahui, titik
akhir pun juga demikian.Titik akhir didefinisikan sebagai titik dari kontur yang
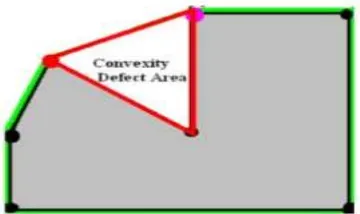
termasuk dalam titik-titik convex hull, tapi titik sebelumnya tidak termasuk dalam titik-titik convex hull.Sebagaimana yang ditunjukkan oleh Gambar 2.6, titik ungu adalah titik akhir dari convexity defects. Dengan menghubungkan titik awal, titik akhir,
dan titik di antara keduanya, area dari convexity defects dapat diketahui sebagaimana
ditunjukkan oleh sebagaimana ditunjukkan oleh Gambar 2.7.(Rudy dan Marcus,
2012).
Gambar 2.7 Area convexity defects(Aliq dan bambang, 2016)
2.5 OpenCV
OpenCV (Open Source Computer Vision) adalah open source library yang berisi lebih dari 500 algoritma teroptimasi untuk analisa citra atau video.Sejak diperkenalkan pada
tahun 1999, OpenCV sebagian besar telah diadopsi sebagai alat pengembangan utama
oleh komunitas peneliti dan pengembang dalam bidang komputer visi.OpenCV pada
awalnya dikembangkan di Intel oleh tim yang dipimpin oleh Gary Bradski sebagai
inisiatif untuk memajukan penelitian dalam visi dan mempromosikan pengembangan
aplikasi yang kaya dan berbasis visi-CPU-intensif. Setelah OpenCV versi Beta diluncurkan, versi 1.0 diluncurkan pada tahun 2006.Rilis besar kedua terjadi pada
tahun 2009 dengan diluncurkannya OpenCV 2 yang menawarkan banyak perubahan
penting.OpenCV didesain untuk digunakan bersama dengan Intel Image Processing
Library (IPL) dan memperluas fungsionalitas terhadap citra dan pola analisis. Oleh karena itu, OpenCV berbagi format (iplImage) citra yang sama dengan IPL.
Pengaplikasian OpenCVdapat digunakan untuk interaksi antara manusia dan computer, misalnya wajah dari manusiadideteksi oleh camera/webcam, lalu di proses oleh computer, untuk melakukan aksitertentu seperti mengikuti/mengenal wajah orang
tersebut.Kesemuanya itumembutuhkan OpenCV sebagai program utama antara
webcam dan perangkatnya yaitucomputer maupun smartphone. Library ini terdiri dari fungsi-fungsi computer vision danAPI (Aplication Programming Interface) untuk image processing high level maupun lowlevel dan sebagai optimisasi aplikasi realtime. OpenCV sangat disarankan untukprogrammer yang akan berkutat pada bidang computer vision, karena library ini mampumenciptakan aplikasi yang handal, kuat dibidang digital vision, dan mempunyaikemampuan yang mirip dengan cara
2.6 Unity 3D
Unity3D merupakan sebuah tools yang terintegrasi untuk membuat bentuk obyek 3 dimensi pada video games atau untuk konteks interaktif lain seperti visualisasi
arsitektur atau animasi 3D real-time. Lingkungan dari pengembangan unity3D
berjalan pada Microsoft Windows dan Mac Os X. Serta aplikasi yang dibuat oleh unity3D dapat berjalan pada Windows, Mac, Xbox 360, Playstation 3, Wii, Ipad,
Iphone dan tidak ketinggalan pada platform Android. Unity juga dapat membuat game berbasis browser yang menggunakan Unityweb player plugin, yang dapat bekerja pada Mac dan Windows, tapi tidak pada Linux.
Adapan fitur–fitur yang dimiliki Unity 3D (Rizki et al. 2012) antara lain sebagai
berikut :
1. Integrated Development Environment (IDE) atau lingkungan pengembangan terpadu.
2. Penyebaran hasil aplikasi pada banyak platform. Seperti Android, Flash, iOS,
Blackberry, Wii, Xbox dan lain – lain.
3. Engine Grafis menggunakan Direct3D (Windows), OpenGL (Mac, Windows), OpenGL ES (iOS) dan proprietary (Wii).
4. Game Scripting melalui Mono, Scripting yang dibangun pada Mono, implementasi Open Source dari NET Framework. Selain itu pemrograman dapat menggunakan Unity Script (Bahasa Kustom dengan sintaks Java Script-Inspired, bahasa C# atau
Boo (yang memiliki sintaks-Python-inspired).
2.7 C#
C# (dibaca C-Sharp) adalah bahasa pemrograman untuk .NetEnvironment.C# adalah
bahasa baru yang miskin kompatibilitas tapi memiliki banyak fitur yang menarik dan
menjanjikan. C# adalah bahasa pemrograman berbasis obyek yang memiliki inti,
banyak kemiripannya dengan Java, C++, dan VB. Kenyataannya, C# menggabungkan
efisiensi dari C++, desain berbasis objek yang sederhana dan bersih dari Java dan
penyederhanaan bahasa dari Visual Basic. Seperti Java, C# juga tidak membolehkan
memori.Akan tetapi, berlawanan dengan Java, C# mempertahankan operasi berguna
yang unik pada C++ seperti operator overloading, enumeration, pre-processor
directive, pointer (pada unmanaged/unsafe code), danfunction pointer (pada pengutusan form).
2.8 Penelitian Terdahulu
Penelitian yang dilakukan Nayana P B dan Sanjev Kubakaddi mengimplementasikan
teknik pengenalan gestur tangan untuk Human Computer Interaction (HCI)
menggunakan OpenCV. Pada penelitian ini, gambar gerakan tangan yang diambil oleh
kamera dijadikan sebagai input untuk algoritma. Algoritma yang digunakan mampu
mengenali jumlah jari yang hadir dalam gerakan tangan
Pada tahun 2015,penelitian yang dilakukan oleh Hu Peng yang berjudul
Application Research on Face Detection Technology based on OpenCV in Mobile Augmented Reality membahastentang pengembangan dan tipe teknologi dari teknologi deteksi wajah dan augmented realitymobile. Perangkat lunak yaang mendukung
penelitian ini antara lain yaitu,Unity3D,3Ds Max dan lainnya. Hasil dari penelitian ini
yaitu ketika kamera mendeteksi wajah,maka akan muncul wajah 3D pada posisi yang
sesuai dan dapat bergerak mengikuti wajah yang dideteksi .pengguna dapat
berinteraksi dengan wajah 3D dengan menekan layar.
Pada tahun tahun 2014 ,Sajjad Ur Rahman, Zeenat Afroze dan Mohammed
Tareq, Melakukan penelitian yang meneliti teknik untuk interaksi manusia-mesin
berdasarkan pengenalan gestur menggunakan teknologi OpenCV yang mana menyediakan struktur data untuk image processing denganefisiensi terbaik. Pada
penelitian ini, seluruh gambar gestur tangan ditangkap oleh web camera. Algoritma
yang digunakan yaitu convexity defects membantu untuk menentukan lokasi telapak
tangan dan ujung jari.
Pada tahun 2012, Rudy Hartanto dan Marcus Nurtiantono Aji membuat sebuah
Perancangan Awal Antarmuka Gestur Tangan Berbasis Visual. Pada penelitian ini
para penelitidalam mendeteksi awal citra menggunakan algoritma segmentasi dengan
deteksi warna kulit menggunakan ruang warna YCrCb.masih dengan menggunakan
didapat akan digunakan sebagai instruksi perintah mouse seperti move, klik kiri, klik
kanan, klik ganda , dan drag.
Pada tahun 2013, Amiraj Dhawan dan Vipul Honrao, melakukan penelitian
yaitu Implementation of Hand Detection based Techniques for Human Computer Interaction. Pada penelitian ini didapat berbagai teknik untuk interaksi manusia-komputer secara efisien. Adapun teknik segmentasi yang digunakan pada penelitian
ini yaitu, Thresholding menggunakan metode Otsu, Incremental Thresholding Value,
dan Color based Thresholding. Untuk ekstraksi fitur ,penelitian ini menggunakan contour, convex-hull dan convexity defects.
Pada tahun 2012, penelitian yang dilakukan oleh Hasup lee et al yaitu Hand
Gesture Recognition using Blob Detection for Immersive Projection Display System.Pada penelitian ini pendeteksian warna kulit berdasarkan warna menggunakan ruang warna HSV.Untuk pengolahan morfologi citra menggunakan metode dilasi dan
erosi.Disini peneliti menggunakan dua tangan dimana masing-masing gestur tangan
memiliki instruksi yang berbeda.Untuk pengenalan gestur, penelitian ini
menggunakan blob detection.
Perbedaan penelitian ini dari penelitian sebelumnya adalah dimana pada
penelitian sebelumnya para peneliti hanya sekedar melakukan pelacakan untuk
mendapatkan lokasi tangan,mengenali pola dan menghitung jumlah jari saja. namun
penelitian yang akan dibuat bersamaan dengan teknologi Augmented Reality dimana
gestur yang akan dikenali sistem akan menjadi sebuah perintah pada aplikasi
Augmented Reality yang dibangun seperti pemilihan sceneobjek Warisan budayaKota
Medan pada aplikasi.
Tabel 2.1. Penelitian Terdahulu
NO. Peneliti Judul Tahun
1. Nayana P B dan
SanjevKubakaddi
Implementation of Hand Gesture Recognition Technique for HCI using OpenCV
2014
2. Hu Peng Application research on face detection technology based on OpenCV in mobile augmented reality
3. Rudy Hartanto
dan Marcus
Nurtiantono Aji
Perancangan Awal Antarmuka Gesture Tangan
Berbasis Visual
2012
4. Sajjad Ur
Rahman, dan
Zeenat Afroze,
dan Mohammed
Tareq
Hand Gesture Recognition Techniques For Human Computer Interaction Using OpenCV
2014
5. Amiraj Dhawan
dan Vipul
Honrao
Implementation of Hand Detection based Techniques for Human Computer Interaction
2013
6. Hasup Lee,
Yoshisuke
Tateyama, dan
Tetsuro Ogi
Hand Gesture Recognition using Blob Detection for Immersive Projection Display System