TUGAS AKHIR
PEMANTAU PERJALANAN KERETA API MENGGUNAKAN SISTEM KOMUNIKASI RADIO DENGAN FREKUENSI 2,4 GHZ
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
TATANG ONY PRASETYAWAN NIM : 055114009
PROGRAM STUDI TEKNIK ELEKTRO FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA YOGYAKARTA
2011
FINAL PROJECT
TRAIN OPERATIONS MONITORING USING A 2,4 GHZ
FREQUENCY SIGNAL RADIO COMMUNICATIONS SYSTEM
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By :
TATANG ONY PRASETYAWAN NIM : 055114009
ELECTRICAL ENGINEERING STUDY PROGRAM SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY YOGYAKARTA
2011
HALAMAN PERSEMBAHAN
MOTTO HIDUP
Demikian juga kamu sekarang diliputi dukacita, tetapi Aku akan melihat kamu lagi dan hatimu akan bergembira dan tidak ada seorangpun yang dapat
merampas kegembiraanmu itu dari padamu. (Bible :Yohanes 16:22) Sampai sekarang kamu belum meminta sesuatupun dalam nama-Ku. Mintalah maka kamu akan menerima, supaya penuhlah sukacitamu. (Bible :Yohanes 16:23)
Skripsi ini kupersembahkan untuk…
Yesus Kristus
”
Papiku
”
yang setia
Bapak dan Ibu tercinta
yang tak Pernah lelah berdoa dan memberikan semangat untuk
aku
Marita Wulan Dari
Yang pernah memberikan ”warna” di hari hariku
Fajar Dwi Riyanto, Esther dan Yusuf adikku tersayang
INTISARI
Seiring berkembangnya teknologi telekomunikasi, hampir semua teknologi terkini berbasis wireless. Hal ini dikarenakan keefektifan dan kemudahan dalam penggunaanya. Sistem ini akan membantu petugas teknis kereta api untuk menentukan posisi keberadaan,kecepatan, dan waktu tiba suatu kereta api.
Teknologi wireless 802.15.4 (Xbee) menggunakan frekuensi 2,4 GHz yang mempunyai jarak jangkauan maksimal sekitar 1,5km. Teknologi penggunaan transmiter yang memanfaatkan frekuensi 2,4GHz dapat digunakan secara bebas, gratis, dan tanpa lisensi ataupun ijin apapun. Sistem ini telah diintegrasikan dengan mikrokontroller sebagai minimum sistem. Hardware yang digunakan untuk komunikasi wireless 802.15.4 adalah Xbee PRO, serta menggunakan mikrokontroller Atmega 8535 sebagai sistem minimum.
Hasil dari Tugas akhir ini yaitu sebuah alat pemantau perjalanan kereta api menggunakan sistem komunikasi radio dengan frekuensi 2,4 GHz. Proses pemantauan kereta api telah bekerja dengan baik dan nilai kecepatan kereta api dikirimkan oleh Xbee PRO. sistem minimum sukses mengolah data dari Xbee pro penerima, sehingga tingkat keakurasian kecepatan kereta api sudah sesuai. Data yang telah sesuai kemudian di tampilkan di LCD.
Kata kunci : pemantauan, wireless 802.15.4, mikrokontroller Atmega 8535
ABSTRACT
Along the development of telecommunication technology, almost all wireless-based technology.This is because the effectiveness and ease of use. This system will help train technical staff to determine position, velocity, and time of arrival of a train.
802.15.4 wireless technology (Xbee) using a frequency of 2.4 GHz which has a maximum range of about 1.5 km. Technology use transmitters that utilize a frequency of 2.4 GHz can be used freely, free, and without any license or permit. This system has been integrated with a microcontroller as a minimum system. Hardware for 802.15.4 wireless communication is Xbee PRO, as well as using the Atmega 8535 microcontroller as a minimum system.
Results of this final project is a train operations monitoring using a 2,4 GHz frequency signal radio communication system has been successfully made. Monitoring process train has been working well and the velocity of the train sent by Xbee PRO.The minimum system successfully process the data from the Xbee pro receiver, so the level of accuracy of the train velocity was appropriate..The data have been fit then displayed on the LCD.
Key words: monitoring, wireless 802.15.4, microcontroller Atmega 8535.
KATA PENGANTAR
Puji syukur dan terima kasih kepada Tuhan Yesus Kristus atas segala karunia-Nya sehingga tugas akhir dengan judul “Pemantau Perjalanan Kereta Api Menggunakan Sistem Komunikasi Radio Dengan Frekuensi 2,4 GHZ” ini dapat diselesaikan dengan baik.
Penelitian yang berupa tugas akhir ini merupakan salah satu syarat bagi mahasiswa Program Studi Teknik Elektro untuk memperoleh gelar Sarjana Teknik di Universitas Sanata Dharma Yogyakarta. Penelitian ini dapat diselesaikan dengan baik atas bantuan, gagasan dan dukungan dari berbagai pihak. Oleh karena itu, peneliti ingin mengucapkan terima kasih kepada:
1. Bapak Yosef Agung Cahyanta, S.T., M.T., selaku Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
2. Bapak Damar Wijaya, S.T., M.T., selaku Dosen Pembimbing yang telah banyak meluangkan waktu untuk memberikan bimbingan, pengetahuan, diskusi, arahan, kritik dan saran kepada peneliti sehingga penulisan tugas akhir ini dapat diselesaikan.
3. Bapak dan Ibu Dosen Teknik Elektro yang telah memberikan semangat, pengetahuan dan bimbingan kepada peneliti selama kuliah.
4. Bapak dan Ibuku tercinta, addiku, serta semua keluarga yang telah memberikan semangat dan dukungan dalam penyelesaian tugas akhir ini.
5. Bapak Mathew dan ibu Selvy yang tak pernah lelah memberikan semangat dan dukungan dalam penyelesaian Tuhas Akhir ini
6. Teman-teman seperjuangan: Mas Ari Sugiyono, Christian Novianto, Valentinus Very Wijayanto, Adhi dan Arie atas diskusi selama ini; dan teman-teman angkatan 2005 untuk kebersamaan dan dukungannya.
7. Semua pihak yang tidak bisa peneliti sebutkan satu-persatu atas bantuan, bimbingan, kritik dan saran.
DAFTAR ISI
Halaman Sampul (Bahasa Indonesia) ... i
Halaman Sampul (Bahasa Inggris) ... ii
Halaman Persetujuan ... iii
Halaman Pengesahan ... . iv
Pernyataan Keaslian Karya... v
Halaman Persembahan dan Moto Hidup... vi
Lembar Pernyataan Persetujuan Publikasi Karya Ilmiah untuk Kepentingan Akademis ... vii
Intisari... viii
Abstract... ix
Kata Pengatar... x
Daftar Isi ... xii
Daftar Gambar ... xv
Daftar Tabel ... xvii
BAB I:PENDAHULUAN ... 1
1.1.Latar Belakang ... 1
1.2.Tujuan dan Manfaat Penelitian ... 2
1.3.Batasan Masalah ... 2
1.4.Metodologi Penelitian ... 3
BAB II: DASAR TEORI ... 5
2.1.Frequency Band 2,4 GHz ... 5
2.2.Xbee PRO ... 6
2.3.LASER... ... 9
2.4.Photo Transistor... 9
2.5.LCD...11
2.6.Mikrokontroler ATMega 8535 ... 13
2.6.1.Konfigurasi Pin ... 14
2.6.2.Peta Memori... 15
2.6.3.Stack Pointer ... 13
2.6.4.Timer ATMEGA 8535 ... 16
2.6.4.1. Timer/Counter0 ... 16
2.6.4.2. Timer/counter1 ... 16
2.6.5. Interupsi ... 17
2.6.6. Osilator Mikrokontroler ... 17
2.7. Operational Amplifier ... 18
2.8. Komparator ... 18
2.9. LED ... 19
2.10.Keypad……….………..21
BAB III: RANCANGAN PENELITIAN ... 23
3.1. Diagram Blok ... 23
3.2. Perancangan Perangkat Keras ... 25
3.2.1. Prototype Kereta Api dan Letak Sensor - Sensor ... 25
3.2.2. Sensor – Sensor Pemantau ... 26
3.2.3. Rangkaian Regulator Tegangan... 28
3.2.4. Rangkaian LCD ... 29
3.2.5. Rangkaian Modul Komunikasi Wireless ... 30
3.2.6. Rangkaian Sistem Minimum Mikrokontroler... 32
3.3. Perancangan Perangkat Lunak ... 35
3.3.1. Perancangan Program Pada Mikrokontroler... 35
3.3.2. Diagram Alir Sub Rutin Baca Sensor ... 37
3.3.3. Diagram Alir Sub Rutin Kirim Data ... 38
3.3.4 Diagram Alir Sub Rutin Tampilkan Data ... 38
BAB IV: HASIL DAN PEMBAHASAN ... 40
4.1. Implementasi Alat ... 40
4.2. Pengujian Rangkaian Xbee Pengirim dan Xbee Penerima ... 42
4.3 Pengujian data Timer mikrokontroler, Kecepatan dan Waktu tiba di stasiun penerima ... 44
4.4. Pengujian Rangkaian Sensor dan Pengkondisi Sinyal ... 47
4.5. Pembahasan Program pada Mikrokontroler... 47
4.5.1. Program Mikrokontroler sistem Pengirim ... 48
4.5.2. Program Mikrokontroler sistem Penerima ... 49
BAB V: KESIMPULAN DAN SARAN ... 52
DAFTAR PUSTAKA ... 53 LAMPIRAN
DAFTAR GAMBAR
Halaman
Gambar 1.1. Blok Model Perancangan ... 3
Gambar 2.1. Konfigurasi Pin XBee PRO ... 6
Gambar 2.2. Komunikasi Xbee PRO ... 8
Gambar 2.3. Teknik Modulasi O-QPSK ... 8
Gambar 2.4. Fototransistor ... 10
Gambar 2.5. Transistor NPN ... 10
Gambar 2.6. Konstruksi LCD ... 11
Gambar 2.7. LCD 2 x 16 ... 12
Gambar 2.8. Konfigurasi Pin ATmega 8535 ... 14
Gambar 2.9. Peta Memori Program ... 15
Gambar 2.10. Peta Memori Data ... 15
Gambar 2.11. Op-amp ... 18
(a) Simbol op-amp ... 18
(b) Rangkaian Pengganti op-amp ... 18
Gambar 2.12. Op-amp Komparator dan Karakteristik Tegangan output( Vo) 19 Gambar 2.13. Grafik Vout dan Vin yang sudah dibandingkan dengan Vref .... 19
Gambar 2.14. Konstruksi LED ... 20
Gambar 2.15. Rangkaian LED ... 20
Gambar 2.16 Tampilan Fisik Keypad dan Konfigurasi tombol……….. 21
Gambar 2.17 Kombinasi Penekanan dua pin Keypad……….22
Gambar 3.1. Diagram blok modul pemancar ... 23
Gambar 3.2. Diagram blok modul penerima ... 24
Gambar 3.3. Model kereta api dan letak sensor –sensor………25
Gambar 3.4. Model rel kereta api dan letak pemicu sensor ... 25
Gambar 3.5. Tampak Depan Model Kereta Api,rel,dan letak pemicu sensor ... 26
Gambar 3.6. Kondisi kaki collector terhadap permukaan terhalang dan tidak terhalang ... 26
Gambar 3.7. Rangkaian sensor pemantau dan rangkaian pembanding ... 28
Gambar 3.8. Rangkaian Regulator Tegangan 5 V ... 28
Gambar 3.9. Rangkaian Regulator Tegangan 3,3 V ... 29
Gambar 3.10. Interface LCD mode 4 bit...30
Gambar 3.11. Rangkaian minimum dari XBee PRO dan Regulator tegangan..32
Gambar 3.12. Rangkaian sistem minimum pemancar ... 33
Gambar 3.13. Rangkaian sistem minimum penerima ... 34
Gambar 3.14. Diagram alir pemrograman utama pengirim pada sistem ... 36
Gambar 3.15. Diagram alir pemrograman utama penerima pada sistem ... 36
Gambar 3.16. Diagram alir sub rutin baca sensor ... 37
Gambar 3.17. Diagram alir sub rutin kirim data ... 38
Gambar 3.18. Diagram alir sub rutin tampilkan data ... 39
Gambar 4.1 Hardware Sistem Pengirim………... 40
Gambar 4.2 Hardware Sistem Penerima………... 41
Gambar 4.3 Diagram pengujian Transmisi data Xbee pro………... 42
Gambar 4.4 Tampilan 2.7 GHz Spectrum Analyzer Gw Instek GSP untuk spectrum frekuensi dari modul Xbee pro ……….. 44
Gambar 4.5 Tampilan LCD pengirim……… 45
Gambar 4.6 Tampilan Osiloskop Digital……… 45
Gambar 4.7 Tampilan LCD Penerima……… 45
DAFTAR TABEL
Halaman
Tabel 2.1. Pembagian Frekuensi Band ISM Menurut ITU-R...6
Tabel 2.2. Lebar Frekuensi Xbee PRO... .7
Tabel 2.3. Spesifikasi Xbee PRO………...………...12
Tabel 2.4. Fungsi Pin-pin LCD………... .15
Tabel 2.5 Deskripsi Pin... 14
Tabel 2.6 Sumber Interupsi... 17
Tabel 3.1. Kondisi keluaran LM 324 Terhadap Permukaan Hitam dan Putih...……... 28
Tabel 4.1. Pengujian Transmisi data Xbee pro ... 42
Tabel 4.2 Pengujian data timer mikrokontroler dan Kecepatan………….. 46
Tabel 4.3 Tabel Pengujian Rangkaian Sensor dan Pengkondisi Sinyal…...48
1
BAB I
PENDAHULUAN
1.1.
Latar Belakang
Kemajuan Ilmu Pengetahuan dan Teknologi (IPTEK) membawa perkembangan teknologi di semua bidang termasuk sistem transportasi sebagai alat mobilitas. Kereta api merupakan moda transportasi dengan multi keunggulan. Kereta api menjadi urat nadi perpindahan penduduk dari satu tempat ke tempat lain di perkotaan, juga antarkota karena daya angkutnya yang besar. Kereta api seharusnya mengikuti perkembangan teknologi ini dengan meningkatkan kualitas pelayanan yang meliputi keamanan dan kenyaman penumpang.
Hampir setiap tahun terjadi kecelakaan kereta api di Tanah Air. Penyebabnya beragam, mulai dari faktor alam, human error, hingga kesalahan teknik [1]. Direktorat Jenderal Perkeretaapian, Departemen Perhubungan, mencatat setidaknya ada 117 kejadian kecelakaan kereta api pada tahun 2008. Kecelakaan kereta api menyebabkan gangguan jadwal perjalanan kereta api yang mengalami kecelakaan, ataupun kereta api lainnya yang melewati jalur rel tersebut.
Direktorat Jenderal Perkeretaapian Indonesia memiliki suatu standar sistem peraturan teknis perkeretaapian yang dijadikan sebagai bahan acuan bidang perkeretaapian. Terdapat 25 peraturan teknis (reglemen) perkeretaapian yang mengatur secara keseluruhan. Reglemen 19 Jilid I Bab IV Pasal 35, ayat 3 menyebutkan bahwa tiap keterlambatan kereta api lebih dari 10 menit harus dikabarkan dengan telegram oleh pengatur perjalanan kereta api stasiun tempat awal kereta api mengalami keterlambatan, yang dialamatkan kepada semua stasiun sepanjang lintasan kereta api yang terlambat. Sebagian reglemen-reglemen ini sudah tidak sesuai dengan perkembangan teknologi kereta api, sehingga diganti / diubah / ditambah oleh peraturan-peraturan lain misalnya Peraturan Pemerintah, Peraturan Dinas, Keputusan Direksi, Maklumat Direksi, atau peraturan lainnya. Penggantian / perubahan / penambahan tersebut saat ini sudah terlalu banyak,
menimbulkan perbedaan persepsi dan tindakan dalam pelaksanaannya. Petugas teknis kereta api di suatu stasiun tidak mendapatkan informasi apapun tentang keterlambatan suatu kereta api, karena pengatur perjalanan kereta api jarang mewartakan telegram keterlambatan kereta api.
Sebagian sistem informasi kereta api di dunia, khususnya negara berkembang masih mengandalkan metode analog yang sudah kuno. Alhasil saat ini dibutuhkan sistem teknologi informasi yang lebih modern dan mengacu pada konsep digital[2]. Berdasarkan hal di atas, penulis ingin membuat suatu sistem pemantau perjalanan kereta api yang menggunakan sistem teknologi informasi yang lebih modern dibandingkan yang sudah ada pada saat ini . Sistem ini memanfaatkan suatu frekuensi bebas 2,4 Ghz untuk mengirimkan data. Mikrokontroler memproses hasil keluaran dari sensor – sensor dan melanjutkan kepada transmitter 2,4 GHz untuk dikirimkan kepada receiver 2,4 GHz yang ada di stasiun pengawas. Petugas stasiun kereta api mendapatkan informasi tentang kereta api yang lewat dengan memanfaatkan data yang dikirim.
1.2. Tujuan dan Manfaat Penelitian
Tujuan dari penelitian ini adalah menghasilkan suatu sistem yang dapat memantau posisi keberadaan dan kecepatan dari suatu kereta api.
Manfaat dari penelitian ini adalah :
1. Sebagai alat bantu bagi petugas teknis kereta api supaya mendapatkan informasi keberadaan dan kecepatan kereta api.
2. Membantu PT. Kereta Api Indonesia (PT. KAI) menyediakan layanan informasi dalam upaya peningkatan pelayanan pada masyarakat khususnya para pengguna layanan perkeretaapian.
1.3. Batasan Masalah
Batasan masalah pada penelitian ini adalah :
1. Jalur dan kereta api yang akan digunakan berupa model. 2. Transmisi data menggunakan frekuensi 2,4 GHz
3. Sensor yang digunakan adalah pemancar cahaya (laser diode) dan penerima cahaya (photo transistor).
1.4. Metedologi Penelitian
Penulisan skripsi ini menggunakan metode:
1. Pengumpulan bahan-bahan referensi berupa buku-buku, jurnal-jurnal dan sumber internet.
2. Perancangan hardware.
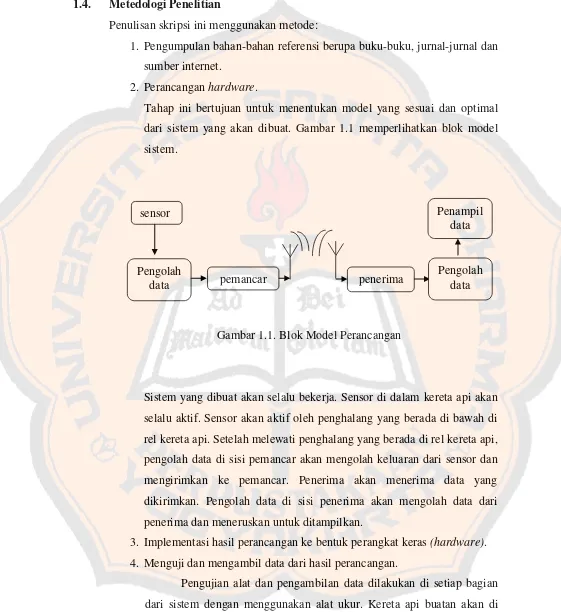
Tahap ini bertujuan untuk menentukan model yang sesuai dan optimal dari sistem yang akan dibuat. Gambar 1.1 memperlihatkan blok model sistem.
Gambar 1.1. Blok Model Perancangan
Sistem yang dibuat akan selalu bekerja. Sensor di dalam kereta api akan selalu aktif. Sensor akan aktif oleh penghalang yang berada di bawah di rel kereta api. Setelah melewati penghalang yang berada di rel kereta api, pengolah data di sisi pemancar akan mengolah keluaran dari sensor dan mengirimkan ke pemancar. Penerima akan menerima data yang dikirimkan. Pengolah data di sisi penerima akan mengolah data dari penerima dan meneruskan untuk ditampilkan.
3. Implementasi hasil perancangan ke bentuk perangkat keras (hardware). 4. Menguji dan mengambil data dari hasil perancangan.
Pengujian alat dan pengambilan data dilakukan di setiap bagian dari sistem dengan menggunakan alat ukur. Kereta api buatan akan di lewatkan pada pemicu sensor agar sistem dapat bekerja. Sensor dan pengolah data akan menghasilkan data keluaran berupa tegangan. sensor
pemancar Pengolah
data penerima
Pengolah data Penampil
Pengambilan data juga dilakukan pada keluaran modul penerima dan dicek apakah data yang dikirim sesuai dengan data yang diterima.
5. Analisa data dilakukan dengan mengecek keakuratan data yang ada dan membandingkan dengan dasar teori serta perancangan. Analisa hasil percobaan dilakukan dengan menghitung persentase error yang terjadi selama pengambilan data. Error akan dianalisis apakah masih bisa ditoleransi atau sudah mengganggu sistem. Jika sudah mengganggu sistem, akan dicari penyebab error dan solusinya.
5
BAB II
DASAR TEORI
2.1.
Frequency Band
2,4 GHz
Sistem Wireless sangat terkenal untuk jaringan data di tingkat lokal dan komunikasi antara beberapa alat komunikasi dengan jarak 10 meter (komunikasi telepon seluler dengan computer menggunakan Bluetooth) , yang disebut WirelessLocal Area Network (WLAN) dan Wireless Personal Area Network (WPAN) [3]. Namun, sebagian besar sistem yang ada merupakan sistem bebas lisensi, baik perencanaan sumber daya atau alokasi bandwidth. Sampai saat ini, sistem yang paling sering digunakan dalam frequency band industrial, scientific and medical (ISM) 2,4 GHz adalah IEEE802.11 dan Bluetooth.
ZigBee dan IEEE802.15.4 adalah dua standar mendatang untuk jaringan nirkabel jarak pendek yang menggunakan frequency band ISM . Aplikasi keduanya diterapkan dalam otomatisasi rumah, industri, dan medis. Aplikasi medis memerlukan keandalan tertinggi di media transmisi.
Frequency band ISM untuk Eropa adalah 868 MHz , untuk Amerika adalah 915 MHz, dan untuk digunakan di seluruh dunia adalah 2,4 GHz [4]. Frekuensi 2,4 GHz menyediakan bandwidth tertinggi per saluran dan jumlah saluran terbesar. Frequency band 2,4 GHz adalah band yang umum digunakan untuk chip RF IEEE802.15.4. Dengan demikian, dalam beberapa bulan atau tahun ke depan, akan ada tiga sistem nirkabel dalam satu frequency band dengan skema modulasi dan saluran akses yang berbeda.
kompatibel. Pengecualian utama adalah Jepang yang memiliki beberapa kendala tambahan. Tabel 2.1 memperlihatkan pembagian frequency band ISM menurut ITU – R.
Tabel 2.1 Pembagian frequency band ISM menurut ITU – R [4]
2.2. XBee PRO
Modul XBee dan XBee-PRO dirancang untuk memenuhi standar ZigBee / IEEE 802.15.4 dan mendukung untuk kebutuhan biaya rendah serta rendah daya jaringan sensor nirkabel [5]. Modul ini memerlukan daya minimal dan dapat diandalkan dalam pengiriman data kritis antar perangkat. XBee-PRO beroperasi dalam frequency band ISM 2,4 GHz. Gambar 2.1 memperlihatkan konfigurasi pin XBee PRO. Tabel 2.2 memperlihatkan lebar frekuensi XBee PRO. Tabel 2.3 memperlihatkan spesifikasi XBee PRO.
Gambar 2.1 konfigurasi pin XBee PRO [5]
Frekuensi (Hz) Frekuensi tengah (Hz)
24–24.25 GHz 24.125 GHz
61–61.5 GHz 61.25 GHz
122–123 GHz 122.5 GHz
244–246 GHz 245 GHz
6.765–6.795 MHz 6.780 MHz
13.553–13.567 MHz 13.560 MHz
26.957–27.283 MHz 27.120 MHz
40.66–40.70 MHz 40.68 MHz
433.05–434.79 MHz 433.92 MHz
902–928 MHz 915 MHz
2.400–2.500 GHz 2.450 GHz
XBee PRO mempunyai beberapa keunggulan dalam hal keamanan jaringan,yaitu :
1. Setiap saluran urutan langsung mempunyai 65.000 alamat yang berbeda. 2. Mendukung pelaksanaan komunikasi point-to-point, point-to-multipoint,
dan topologi peer-to-peer. 3. Enkripsi hingga 128 bit.
4. Menggunakan arus yang rendah yaitu a) Arus Tx : 270 mA ( @ 3.3 v) b) Arus Rx : 55 mA (@ 3.3 v)
5. Tidak memerlukan konfugurasi selain di dalam modul XBee PRO
Tabel 2.2 Lebar Frekuensi XBee PRO [5] Frequency
Band
Channel Numbering
Spreading Parameters Data Paramaters Chip
Rate Modulation Bit Rate
Symbol
Rate Modulation 2.4-2.4835
GHz 11 to 26
2.0
Mchips O-QPSK
250 kb/s
62,5 kbaud
16-ary Orthogonal
Komunikasi secara serial digunakan untuk berkomunikasi dengan perangkat lain menggunakan media kabel serial. Komunikasi serial ini menggunakan metode asinkronus serial. Gambar 2.2 memperlihatkan komunikasi XBee PRO.
Gambar 2.2 Komunikasi XBee PRO [5]
Penggunaan komunikasi secara wireless akan mempengaruhi terhadap data yang dikirimkan. Data yang dikirimkan melalui gelombang radio harus melalui tahap – tahap terlebih dahulu. Oleh karena itu perlu dilakukan proses modulasi terlebih dahulu. Di negara Indonesia rentang frekuensi yang bebas digunakan adalah pada frekuensi 2,4 GHz. Modul XBee PRO menggunakan O-QPSK sebagai teknik modulasi.
O-QPSK ( Ofseet – Quadrature Phase Shift Keying ) adalah salah satu pengembangan dari PSK (Phase Shift Keying ). Teknik modulasi ini merupakan teknik modulasi digital yang memanfaatkan fase dari suatu sinyal. Teknik modulasi O-QPSK tidak jauh berbeda dengan QPSK (Quadrature Shift Keying) yang memiliki 4 fase berbeda dimana setiap fase melambangkansuatu nilai data. Setiap simbol tersebut berbeda 90o. Pada O-QPSK sinyal QPSK diperlambat 1 periode bit terhadap infasenya,sehingga tidak akan terjadi loncatan fase lebih dari 180o.perbedaan tiap fase simbol tidak akan lebih dari 90o. Gambar 2.3 memperlihatkan teknik modulasi O-QPSK.
2.3. Laser
Light Amplification by Stimulated Emission of Radiation (LASER) adalah sumber cahaya koheren yang monokromatik dan amat lurus dengan perbesaran intensitas cahaya oleh pancaran terangsang [6]. Semikonduktor ada 2 jenis, yaitu semikonduktor jenis N dan semikonduktor jenis P [7]. Laser semikonduktor biasa disebut laser injeksi, karena pemompaannya dilakukan dengan injeksi arus listrik lewat sambungan PN semikonduktornya. Laser ini adalah sebuah diode dengan prasikap tegangan maju biasa. Laser semikonduktor yang pertama diciptakan secara bersamaan oleh tiga kelompok pada tahun 1962. Diode diode yang digunakan adalah galiun arsenida-flosfida GaAsP (sinar-tampak merah).
Prinsip kerja laser jenis ini mirip dengan prinsip kerja LED biasa. Pancaran fotonnya disebabkan oleh bergabungnya kembali dari lubang (hole) di daerah sambungan PN-nya. Bahan semikonduktor yang dipakai harus memiliki celah yang langsung, agar dapat melakukan radiasi foton tanpa melanggar kekekalan momentum. Oleh sebab itulah laser semikonduktor tidak pernah menggunakan bahan seperti germanium yang celah energinya tidak langsung.
Laser semikonduktor masih mempunyai dua syarat tambahan jika dibandingkan dengan LED. Yang pertama, bahannya harus diberi doping banyak sekali sehingga tingkat ferminya melampaui tingkat pita konduksi di bagian N dan masuk ke bawah tingkat pita valensi di bagian P. Hal ini perlu agar keadaan populasi di daerah sambungan PN dapat dicapai. Yang kedua, rapat arus listrik maju yang digunakan haruslah besar, begitu besar sehingga melampaui harga ambangnya. Besarnya sekitar 50 ribu ampere/cm2 agar laser yang dihasilkan bersifat kontinu. Rapat arus ini luar biasa besar, sehingga diode laser harus ditaruh di dalam kriostat supaya suhunya tetap rendah (77 K). Arus yang besar dapat merusak daerah sambungan PN sehingga diode berhenti menghasilkan laser.
2.4. Photo Transistor
Gambar 2.4 Gambar Fototransistor [8]
Transistor bipolar memiliki 2 junction yang dapat disamakan dengan penggabungan 2 buah dioda. Emitter-base adalah satu junction dan collector-base adalah junction lainnya. Seperti pada dioda, arus hanya akan mengalir jika diberi prasikap tegangan positif, yaitu jika tegangan pada material P lebih positif daripada material N (forward bias). Ilustrasi transistor NPN ditunjukkan pada Gambar 2.5 , junction emitter-base diberi prasikap tegangan positif sedangkan collector-base mendapat prasikap tegangan negatif (reverse bias).
Gambar 2.3 Transistor NPN [8]
Transistor bipolar berbeda dengan photo transistor. Transistor mengalami kondisi cut off saat tidak ada arus yang mengalir melalui base ke emitter dan mengalami kondisi saturasi saat ada arus yang mengalir melalui base ke emitter. Photo transistor mengalami kondisi cut off saat tidak ada cahaya laser yang diterima dan kondisi saturasi saat ada cahaya laser yang diterima [9].
Kondisi cut off adalah kondisi dengan photo transistor berada dalam keadaan off sehingga arus dari collector tidak mengalir ke emitter. Sehingga,
Ib = 0 (2.1)
Ic = Isat
(2.2)
2.5. LCD
Liquid Crystal Display (LCD) adalah komponen yang berfungsi untuk menampilkan suatu karakter pada suatu tampilan (display) dengan bahan utama yang digunakan berupa Liquid Crystal [10]. Apabila diberi arus listrik sesuai dengan jalur yang telah dirancang pada konstruksi LCD, Liquid Crystal akan berpendar menghasilkan suatu cahaya dan cahaya tersebut akan membentuk suatu karakter tertentu. Gambar konstruksi LCD disajikan pada Gambar 2.6
Gambar 2.6 Konstruksi LCD [10]
LCD yang sering digunakan adalah jenis LCD M1632. M1632 merupakan modul LCD dengan tampilan 2 x 16 (2 baris, 16 kolom) dengan konsumsi daya rendah. Modul tersebut dilengkapi dengan mikrokontroler yang didesain khusus untuk mengendalikan LCD. Mikrokontroler HD44780 buatan Hitachi yang berfungsi sebagai pengendali LCD memiliki CGROM (Character General Read Only Memory), CGRAM (Character General Random Access Memory) , dan DDRAM (Display Data Random Access Memory). LCD bertipe ini memungkinkan pemrogram untuk mengoperasikan komunikasi data 8 bit atau 4 bit. Jika menggunakan jalur data 4 bit, maka akan ada 7 jalur data (3 untuk jalur kontrol & 4 untuk jalur data). Jika menggunakan jalur data 8 bit, maka akan ada 11 jalur data (3 untuk jalur kontrol & 8 untuk jalur data). Tiga jalur
sat S
I V Rc
Rc V
I S
kontrol ke LCD ini adalah EN (Enable), RS (Register Select) dan R/W (Read/Write). LCD 2 x 16 disajikan pada Gambar 2.7.
Gambar 2.7 LCD 2 x 16 [10]
LCD jenis M1623 memiliki jumlah pin sebanyak 16 yang memiliki fungsi berbeda-beda. Fungsi pin-pin tersebut disajikan pada Tabel 2.4.
Tabel 2.4. Fungsi Pin-pin LCD [10] Nomor Pin Simbol Nomor Pin Simbol
1 GND 9 DB2
2 VCC (5V) 10 DB3
3 Vlcd 11 DB4
4 RS 12 DB5
5 R/W 13 DB6
6 E 14 DB7
7 DB0 15 A
8 DB1 16 K
Fungsi pin LCD pada Tabel 2.4 adalah :
1. Vlcd merupakan pin yang digunakan untuk mengatur tebal tipisnya karakter yang tertampil dengan cara mengatur tegangan masukan.
2. DB0 s/d DB7 merupakan jalur data yang dipakai untuk menyalurkan kode ASCII maupun perintah pengatur LCD.
perintah untuk mengatur kerja LCD. Jika RS berlogika „1‟, maka data yang dikirimkan adalah kode ASCII yang ditampilkan.
4. R/W (Read/Write) merupakan pin yang digunakan untuk mengaktifkan pengiriman dan pengembalian data ke dan dari LCD. Jika R/W berlogika „1‟, maka akan diadakan pengambilan data dari LCD. Jika R/W berlogika „0‟, maka akan diadakan pengiriman data ke LCD.
5. E (Enable) merupakan sinyal singkronisasi. Saat E berubah dari logika „1‟ ke „0‟, data di DB0 s/d DB7 akan diterima atau diambil diambil dari port mikrokontroler.
6. A (Anoda) dan K (Katoda) merupakan pin yang digunakan untuk menyalakan backlight dari layar LCD.
2.6
Mikrokontroler ATMega8535
Mikrokontroler merupakam chip cerdas yang menjadi tren dalam pengendalian dan otomatisasi, terutama dikalangan mahasiswa [11]. Dengan banyak jenis keluarga, kapasitas memori, dan berbagai fitur, mikrokontroler menjadi pilihan dalam aplikasi prosesor mini untuk pengendalian skala kecil.
Mikrokontroler AVR (Alf and vegard’s Risc processor) dari Atmel menggunakan arsitektur RISC (Reduced Instruction Set Computer) yang artinya prosesor tersebut memiliki set instruksi program yang lebih sedikit dibandingkan dengan MCS-51 yang menerapkan arsitektur CISC (Complex Instruction Set Computer).
Hampir semua instruksi prosesor RISC adalah instruksi dasar (belum tentu sederhana), sehinggga instruksi-instruksi ini umumnya hanya memerlukan 1 siklus mesin untuk menjalankannya. Kecuali instruksi percabangan membutuhkan 2 siklus mesin. RISC biasanya dibuat dengan arsitektur Harvard, karena arsitektur ini memungkinkan untuk membuat eksekusi instruksi selesai dikerjakan dalam satu atau dua siklus mesin, sehingga semakin cepat dan handal. Proses downloading programnya relatif lebih mudah karena dapat dilakukan langsung pada sistemnya.
dan instruksi yang digunakan, mereka hampir sama. Sebagai pengendali utama dalam pembuatan sistem ini digunakan salah satu produk ATMEL dari keluarga ATMega yaitu ATMega8535 [11].
2.6.1 Konfigurasi Pin
ATMega8535 terdiri atas 40 pin dengan konfigurasi seperti pada Tabel 2.5 dan Gambar 2.8.
Tabel 2.5. Deskripsi Pin [11]
2.6.2 Peta Memori
Arsitektur AVR terdiri atas dua memori utama, yaitu Data Memori dan Program Memori. Sebagai tambahan fitur dari ATMega8535, terdapat EEPROM 512 byte sebagai memori data dan dapat diprogram saat operasi [11].
ATMega8535 terdiri atas 8 Kbyte On-chip In-System Reprogrammable Flash Memory untuk menyimpan program. Karena seluruh instruksi AVR dalam bentuk 16 bit atau 36 bit, Flash dirancang dengan kompisisi 4K x 16. Untuk mendukung keamanan software atau program, Flash Program memori dibagi menjadi dua bagian yaitu bagian Boot Program dan bagian Application Program. Gambar 2.9 mengilustrasikan susunan Memori Program Flash ATMega8535.
Gambar 2.9. Peta Memori Program [11]
Memori data terbagi menjadi 3 bagian, yaitu 32 buah register umum, 64 buah register I/O, dan 512 byte SRAM Internal. Konfigurasi memori data ditunjukkan oleh Gambar 2.10.
2.6.3 Stack Pointer
Stack pointer merupakan suatu bagian dari AVR yang berguna untuk menyimpan data sementara, variabel lokal, dan alamat kembali dari suatu interupsi ataupun subrutin [11]. Stack pointer diwujudkan sebagai dua unit register, yaitu SPH dan SPL.
Saat awal, SPH dan SPL akan bernilai 0, sehingga perlu diinisialisasi terlebih dahulu. SPH merupakan byte atas / Most Significant Bit (MSB), sedangkan SPL merupakan byte bawah / Least Significant Bit (LSB). Hal ini hanya berlaku untuk AVR dengan kapasitas SRAM lebih dari 256 byte.
2.6.4 Timer ATMega8535
AVR ATMega8535 memiliki 3 buah timer, yaitu Timer/Counter0 (8 bit), Timer/Counter1 (16 bit), dan Timer/Counter2 (8 bit) [11].
2.6.4.1.
Timer/Counter0
Timer/Counter0 adalah Timer/Counter 8 bit yang multifungsi [11]. Fitur-fitur dari Timer/Counter0 pada ATMega8535 adalah sebagai berikut.
a. Counter 1 kanal.
b. Timer di-nol-kan saat proses pembanding tercapai (compare match). c. Sebagai pembangkit gelombang PWM.
d. Sebagai pembangkit frekuensi. e. Clock prescaler 10 bit.
f. Sumber interupsi dari compare match (OCF0) dan overflow (TOV0).
2.6.4.2.
Timer/Counter1
Timer/Counter1 adalah Timer/Counter 16 bit yang memungkinkan program pewaktu lebih akurat [11]. Fitur-fitur dari Timer/Counter1 ini adalah sebagai berikut.
a. Desain 16 bit, sehingga memungkinkan untuk menghasilkan PWM 16 bit. b. Dua buah unit pembanding.
c. Dua buah register pembanding. d. Satu buah input capture unit.
g. Periode PWM yang dapat diubah-ubah. h. Sebagai pembangkit frekuensi.
i. Empat buah sumber interupsi (TOV1, OCF1A, OCF1B, dan ICF1).
2.6.5 Interupsi
ATMega8535 memiliki 21 buah sumber interupsi [11]. Interupsi tersebut bekerja jika bit 1 pada Register status atau Status Register (SREG) dan bit pada masing-masing register bernilai 1. Penjelasan sumber interupsi terdapat pada Tabel 2.6.
Tabel 2.6. sumber interupsi [11]
Tabel 2.6. Vektor Interupsi ATMega8535
2.6.6 Osilator Mikrokontroler
Rangkaian osilator adalah rangkaian pembangkit frekuensi untuk menentukan besarnya waktu untuk tiap siklus pada mikrokontroler [11]. Waktu yang dibutuhkan tiap satu siklus dapat dicari dengan persamaan :
2.7
Operational Amplifier
Operational amplifier (op-amp) pada dasarnya adalah sebuah differential amplifier (penguat differential) yang memiliki 2 buah terminal input [12]. Terminal input op-amp terdiri dari input inverting (-) dan input non-inverting (+). Gambar 2.11 menunjukkan simbol dan rangkaian pengganti dari op-amp.
Gambar 2.11. Op-amp[12]
(a). Simbol op-amp (b). Rangkaian pengganti op-amp
Karakteristik dari op-amp ideal adalah sebagai berikut:
a. Op-amp ideal memiliki open loop gain (penguatan loop terbuka) yang besarnya tak terhingga. Penguatan yang besar ini membuat op-amp menjadi tidak stabil dan penguatannya menjadi tidak terukur (infinite). Untuk membuat op-amp menjadi aplikasi yang memiliki nilai penguatan yang terukur (finite), op-amp memerlukan rangkaian umpan balik negatif (negative feedback).
b. Besarnya impedansi input op-amp ideal adalah tak terhingga, sehingga tidak ada arus yang masuk pada kedua terminal input.
2.8
Komparator
Gambar 2.12 Op-amp komparator dan karakteristik tegangan output (Vo) [12]
Gambar 2.12 memperlihatkan jika tegangan masukan (Vin) lebih besar daripada tegangan referensi (Vref), maka tegangan keluaran (Vout) adalah positif jenuh tegangan V+ atau (+Vsat). Sebaliknya jika tegangan masukan (Vin) lebih kecil daripada tegangan referensi (Vref) maka nilai tegangan keluaran (Vout) adalah negatif jenuh tegangan V -atau (-Vsat). Jadi Vout mempunyai nilai yang besarnya +Vsat dan –Vsat dan dapat pula bernilai 0V tergantung pemberian catu pada kaki V+ dan V-. Gambar 2.13 menunjukkan grafik antara Vin, Vout, dan Vref.
Gambar 2.13. Grafik Vout dan Vin yang sudah dibandingkan dengan Vref [12]
2.9
LED
langsung ke jalur valensi untuk mengalirkan arus Kontruksi LED dapat dilihat pada Gambar 2.14.
Gambar 2.14 Konstruksi LED [13]
LED mempunyai penurunan tegangan lazimnya dari 1,5 V sampai 2,5 V untuk arus di antara 10 dan 50 mA. Penurunan tegangan yang tepat tergantung dari arus LED, warna, kelonggaran, dan sebagainya. Pancaran sinar LED tergantung dari arusnya. Idealnya, cara terbaik untuk mengendalikan pancaran sinar adalah dengan menjalankan LED dengan sumber arus. Gambar dari rangkaian LED disajikan pada Gambar 2.15
Gambar 2.15. Rangkaian LED [7]
(2.5) dengan VLED adalah penurunan tegangan LED (Volt), VS adalah tegangan sumber (Volt), RS adalah resistor yang tersusun seri dengan LED (Ohm), dan I adalah arus (Ampere),
Makin besar tegangan sumber, makin kecil pengaruh VLED. Dengan kata lain Vs
yang besar menghilangkan pengaruh perubahan tegangan VLED. Biasanya, arus LED ada
di antara 10 mA sampai 50 mA[7].
2.10
Keypad
Keypad adalah rangkaian tombol yang berfungsi untuk memberi sinyal pada suatu rangkaian dengan menghubungkan jalur – jalur tertentu [14]. Keypad terdiri dari beberapa macam berdasarkan jumlah tombol dan fungsinya. Pada system ini, digunakan keypad matriks 3 x 4 ( 12 saklar ) dengan pin penghubung rangkaian berjumlah 7 buah. Gambar dari tampilan fisik keypad dan konfigurasi tombol ditunjukkan pada Gambar 2.16.
Gambar 2.16. Tampilan fisik keypad dan konfigurasi tombol [14]
Ketujuh pin penghubung ini terbagi menjadi dua kelompok yaitu 4 buah pin sebagai input dan 3 buah lainnya sebagai output . Fungsi dari 7 pin I/O adalah untuk menjadi kombinasi penghubung pada rangkaian yang akan disambungkan dengan keypad. Dalam setiap penekanan satu tombol / saklar keypad maka terjadi kombinasi
S LED S
R V V
antara dua buah pin dalam pembacaan sinyalnya. Gambar 2.17 memperlihatkan kombinasi penekanan dua pin keypad.
23
BAB III
PERANCANGAN
Sistem ini digunakan untuk memantau posisi dan kecepatan dari suatu kereta api dengan memanfaatkan suatu frekuensi bebas 2,4 Ghz untuk mengirimkan data. Perancangan sistem pemantau perjalanan kereta api menggunakan sistem komunikasi radio dengan frekuensi 2,4 GHz terdiri dari 2 bagian utama, yaitu: bagian perancangan perangkat keras (rangkaian pengirim dan rangkaian penerima) dan bagian perancangan perangkat lunak. Bagian perangkat keras terdiri atas: sensor pemantau kereta api, rangkaian pengkondisi sinyal, mikrokontroler ATMEGA 8535 , modul XBee PRO, keypad dan LCD sebagai penampil informasi yang telah dikirimkan. Sedangkan untuk bagian perangkat lunak terdiri atas: program untuk menangani input dan output dari mikrokontroler ATMEGA 8535 serta program untuk menangani pengiriman dan penerimaan data dari XBee PRO.
Sistem menggunakan Photo transistor dan LASER sebagai sensor. Mikrokontroler memproses hasil keluaran dari sensor yang bekerja dan melanjutkan kepada transmitter 2,4 GHz untuk dikirimkan secara wireless kepada receiver 2,4 GHz di stasiun pengawas. Pemantauan yang dilakukan terdiri dari pengambilan data kecepatan kereta yang telah melewati sensor. Petugas stasiun kereta api mendapatkan informasi tentang kereta api yang lewat dengan memanfaatkan data yang terkirim.
3.1
Diagram Blok
Diagram blok dalam perancangan ini terdiri dari 2 bagian yaitu modul pemancar dan modul penerima. Diagram blok modul pemancar ditunjukkan pada Gambar 3.1 dan diagram blok modul penerima ditunjukkan pada Gambar 3.2
Gambar 3.2 Diagram blok modul penerima
Diagram blok modul pemancar terdiri dari sensor pemantau kereta api, rangkaian pengkondisi sinyal, IC mikrokontroler ATMEGA 8535 sebagai IC pengatur pengiriman data, dan output berupa modul XBee PRO sebagai pemancar sinyal. Diagram blok modul penerima terdiri dari modul XBee PRO sebagai penerima sinyal, IC mikrokontroler ATMEGA 8535 sebagai pengolah data pemantau posisi dan kecepatan Kereta Api, keypad sebagai masukan untuk menentukan nilai jarak, dan output berupa 1 buah LCD sebagai penampil untuk user.
Sistem pemantau perjalanan kereta api menggunakan sistem komunikasi radio dengan frekuensi 2,4 GHz. Sistem ini akan bekerja ketika sensor mendeteksi adanya pemicu sensor yang berada di rel kereta api, sehingga sensor menghasilkan tegangan. Tegangan keluaran yang dihasilkan masih dalam bentuk analog, maka dibutuhkan rangkaian pengkondisi sinyal. Rangkaian yang digunakan adalah rangkaian pembanding (comparator). Keluaran comparator berupa sinyal digital berlogika 1 atau 0 .
Data keluaran dari rangkaian pengkondisi sinyal akan masuk ke mikrokontroler yang selanjutnya akan mengirimkan data tersebut ke modul XBee PRO yang diaktifkan sebagai modul pemancar. Modul XBee PRO yang diaktifkan sebagai modul penerima menerima sinyal yang telah dikirim. Data keluaran dari modul XBee PRO akan masuk ke mikrokontroler. Mikrokontroler mengolah data dan menampilkannya ke LCD yang digunakan sebagai penampil informasi oleh petugas stasiun kereta api. Petugas kereta api mengetahui posisi terakhir kereta api dari letak penghalang sensor yang terletak di rel kereta api.
Modul XBee PRO
Mikrokontroler
ATMEGA 8535 LCD
3.2
Perancangan Perangkat Keras
3.2.1
Prototype
Kereta Api dan letak Sensor
Gambar 3.3 memperlihatkan model kereta api dan sensor dalam kereta api. Gambar 3.4 memperlihatkan model rel kereta api dan letak penghalang sensor. Sensor yang digunakan pada perancangan ini diletakkan di body bawah bagian depan dari prototype kereta api. Penghalang sensor diletakkan di bagian tengah rel dari arah stasiun pengawas. Prototype rel kereta memiliki panjang 200 cm dan lebar 9 cm. Prototype lokomotif dan gerbong kereta api masing - masing memiliki panjang 19 cm, lebar 11 cm, dan tinggi 12 cm .
Gambar 3.3 Model kereta api dan letak sensor
Gambar 3.5 Tampak depan model kereta api, rel dan letak pemicu sensor (A).Roda kereta api (B). Rel kereta api (C). Sensor (D). Pemicu sensor
3.2.2 Sensor Pemantau
Sensor mengaktifkan timer untuk perhitungan kecepatan dengan menentukan keadaan sensor terhalang maupun tidak yang akan dipilih melalui rangkaian pengkondisi sinyal. Rangkaian pengkondisi sinyal menentukan logika 1 untuk terhalang dan logika 0 untuk tidak terhalang. Keluaran dari rangkaian pengkondisi sinyal akan menjadi masukkan pada timer mikrokontroler. Sensor kecepatan yang digunakan yaitu Laser sebagai pemancar dan dengan Phototransistor sebagai penerima. Perbedaan tanggapan Phototransistor terhadap kondisi terhalang dan tidak terhalang yang menjadi dasar dari rangkaian yang akan dirancang dapat dilihat pada Gambar 3.6.
Berdasarkan dasar teori LED Laser dibutuhkan arus sebesar 6,25 mA dan VLED
adalah 1,5 Volt, dan Vcc (catu daya) 5 Volt, sehingga Rs dapat dicari dengan persamaan
(3.1)sebagai berikut :
(3.1)
Berdasarkan dasar teori LED dibutuhkan arus sebesar 15 mA dan VLED adalah
1,5 Volt, dan Vcc (catu daya) 5 Volt, sehingga Rind dapat dicari dengan persamaan(3.2)
sebagai berikut :
(3.2)
Photo transistor merupakan sebuah transistor yang akan saturasi pada saat
menerima sinar laser dan cut off pada saat tidak ada sinar laser[8] . Photo transistor akan saturasi saat arus sebesar 500uA [15]. Dengan Vcc (catu daya) 5 Volt, maka dapat dicari Rd dengan persamaan(3.3) sebagai berikut:
(3.3)
Resistor yang digunakan untuk resistor indikator adalah 270Ω karena nilainya mendekati 233,33Ω dan ada dipasaran. Resistor yang digunakan pada LED Laser dan photo transistor adalah 560Ω dan 10kΩ. Tabel 3.1 menunjukkan kondisi keluaran LM 324 Terhadap Permukaan Hitam dan Putih. Gambar 3.7 menunjukkan rangkaian sensor pemantau dan rangkaian pembanding.
Tabel 3.1. Kondisi keluaran LM 324 Terhadap Permukaan Hitam dan Putih
Permukaan Kondisi keluaran LM 324
Tidak 1 (HIGH)
Terhalang 0 (LOW)
Gambar 3.7. Rangkaian sensor pemantau dan rangkaian pembanding.
3.2.3 Rangkaian Regulator Tegangan
Perangkat ini digunakan untuk mencatu semua komponen dengan masukan 5 volt dalam sistem ini. Sistem ini membutuhkan regulator tegangan untuk menyesuaikan tegangan baterai sebesar 9 volt dengan tegangan mikrokontroler, sensor dan LCD yang bekerja pada tegangan 5 volt. Modul XBee PRO membutuhkan tegangan masukan sebesar 3,3 V,sehingga tegangan keluaran dari regulator 5V harus di turunkan menjadi sebesar 3,3V. Rangkaian regulator dapat dilihat pada Gambar 3.8 dan Gambar 3.9.
Gambar 3.9. Rangkaian Regulator Tegangan 3,3 V
3.2.4 Rangkaian LCD
LCD ini digunakan sebagai penampil keluaran mikrokontroler khusus untuk mode tampilan pesan. LCD yang digunakan adalah LCD yang menggunakan chip kontroler Hitachi HD44780, misalnya M1632. LCD bertipe ini memungkinkan pemrogram untuk mengoperasikan komunikasi data secara 8 bit atau 4 bit. Jika menggunakan jalur data 4 bit maka akan ada 7 jalur data (3 untuk jalur kontrol dan 4 untuk jalur data). Jika menggunakan jalur data 8 bit maka akan ada 11 jalur data (3 untuk jalur kontrol dan 8 untuk jalur data). Tiga jalur kontrol ke LCD ini adalah EN (Enable), RS (Register Select) dan R/W (Read/Write).
data). Karena dalam penelitian ini kecepatan tidak sangat diutamakan, maka dipilih mode 4 bit. Interface LCD dengan mode 4 bit dapat dilihat pada Gambar 3.10.
Gambar 3.10 Interface LCD mode 4 bit
3.2.5 Rangkaian Modul Komunikasi Wireless
macam komunikasi yang berbeda, tergantung dari perangkat apa yang dihubungkan dengan modul XBee PRO. Komunikasi dapat dilakukan dengan menggunakan jaringan wireless dan komunikasi secara serial. Pada jaringan XBee PRO ini terdapat dua macam perangkat (node) yaitu FFD (Full Function Device) dan RFD (Reduced Function Device). FFD dapat bertindak sebagai penghubung beberapa node disebut dengan koordinator ataupun sebagai node terakhir (end-user).
Topologi jaringan yang digunakan adalah jaringan star dan jaringan mesh atau peer to peer. Sistem ini menggunakan jaringan peer to peer, karena hanya menghubungkan antara kereta api dan stasiun. Command mode adalah sebuah masukan pertama kali dari mikrokontroler untuk membaca parameter-parameter modul RF. Command mode yaitu suatu keadaan dimana karakter-karakter yang datang didefinisikan sebagai suatu perintah. Ada dua macam command mode yang tersedia, yaitu AT Command Mode dan API Command Mode (Application Programming Interface).
Rangkaian transmitter adalah modul pengirim data yang menggunakan XBee PRO, rangkaian dihubungkan pada mikrokontroler sebagai media pengiriman data secara serial via wireless. Pengiriman data menggunakan XBee PRO (secara wireless) sama seperti menghubungkan mikrokontroler secara serial, sehingga tidak mengalami kesulitan dalam pembacaan data yang telah terkirim.
Gambar 3.11 Rangkaian minimum dari XBee PRO dan Regulator tegangan [5].
3.2.6
Rangkaian Sistem Minimum Mikrokontroler
Rangkaian reset digunakan untuk melakukan reset pada mikrokontroler, sehingga eksekusi program mikrokontroler akan dimulai kembali dari awal. Mikrokontroler akan mengeksekusi program pada saat port RST diberikan logika „0‟. Jika port RST diberikan logika „1‟, maka program akan kembali ke awal (reset). Rangkaian reset pada mikrokontroler ATMega 8535. Rangkaian power on reset terdiri dari 1 buah resistor 1KΩ, 1 buah kapasitor 100uF dan tombol microswitch. Tombol microswitch tersebut dirangkai secara paralel dengan kapasitor dan sumber tegangan DC 5V. Tombol reset ini dihubungkan ke pin RST (pin 9).
3.3
Perancangan Perangkat Lunak
3.3.1 Perancangan Program pada Mikrokontroler
Dalam perancangan sistem ini, perangkat lunak yang digunakan sebagai programmer mikrokontroler adalah BASCOM AVR. BASCOM AVR adalah program yang menggunakan bahasa basic yang ringkas dan dirancang untuk compiler bahasa mikrokontroler AVR. Program utama berisi gambaran umum tentang cara kerja sistem utama. Program utama terdiri dari program utama pengirim dan program utama penerima.
Program utama pengirim dimulai dengan penginisialisasian dari port-port, register dan variabel yang digunakan. Centimeter/sekon menyatakan satuan dari kecepatan kereta dan centimeter menyatakan satuan dari posisi kereta. Inisialisasi dilanjutkan dengan pembacaan masukan dari sensor sehingga didapatkan waktu tempuh. Mikrokontroler pengirim akan mengolah waktu tempuh untuk menjadi kecepatan kereta api. Kecepatan kereta api menggunakan persamaan(3.4) sebagai berikut:
(3.4)
dengan V adalah kecepatan (cm/s), S adalah jarak penghalang sensor (cm), dan t adalah waktu aktif sensor (s).
Mikrokontroler menghasilkan waktu aktif sensor dengan satuan sekon. Mikrokontroler mengirimkan nilai kecepatan melalui komunikasi serial untuk dikirimkan melalui XBee PRO pemancar. Gambar 3.14 menunjukkan diagram alir pemrograman utama pengirim pada sistem.
Program utama penerima dimulai dengan penginisialisasian dari port-port, register dan variabel yang digunakan. Port Pb akan menerima masukan keypad. Masukan keypad adalah jarak pemicu sensor dengan stasiun. Port serial dari mikrokontroler akan membaca data yang berada pada XBee PRO penerima. LCD akan menampilkan kecepatan dan posisi yang diolah oleh mikrokontroler. Gambar 3.15 menunjukkan diagram alir pemrograman utama penerima pada sistem.
.
Start
Inisialisasi port
Sub rutin Sensor
Sub rutin Kirim Data
Selesai
Gambar 3.14 Diagram alir pemrograman utama pengirim pada sistem
Gambar 3.15 Diagram alir pemrograman utama penerima pada sistem
Start
Inisialisasi port
Baca data terkirim
Sub rutin Penampil
data
Selesai Masukan
3.3.2 Diagram Alir Sub Rutin Baca Sensor
Sub rutin baca sensor berfungsi untuk mengendalikan pembacaan sensor oleh mikrokontroler. Mikrokontroler akan mendeklarasikan port – port bagi masukan sensor dan mendeklarasikan timer mikrokontroler yang digunakan menjadi counter . Sensor yang terdeteksi akan menjadi sebuah masukan bagi mikrokontroler. Sensor yang terdeteksi menjadi pemicu aktifnya timer pada mikrokontroler. Timer pada mikrokontroler akan berhenti saat pemicu sensor tidak lagi terdeteksi oleh sensor (sensor pada posisi low). Gambar 3.16 menunjukkan diagram alir sub rutin baca sensor.
Gambar 3.16 Diagram alir sub rutin baca sensor.
Start
Inisialisasi untuk port sensor
Baca Sensor
Sensor = 0
Start Timer
Timer ++
Sensor = 1
Stop Timer
Ya
Tidak Ya
3.3.3 Diagram Alir Sub Rutin Kirim Data
Sub rutin kirim data berfungsi untuk mengirimkan data yang telah diproses kepada port serial mikrokontroler. Mikrokontroler akan mendeklarasikan port – port serial, register, dan baudrate. Data yang telah siap untuk dikirim akan dikeluarkan pada port serial. Gambar 3.17 menunjukkan diagram alir sub rutin kirim data.
Gambar 3.17 Diagram alir sub rutin kirim data
3.3.4 Diagram Alir Sub Rutin Tampilkan data
Sub rutin tampilkan data di LCD berfungsi untuk menampilkan semua informasi yang diperlukan oleh user. Mikrokontroler akan mendeklarasikan port dari modul Xbee PRO dan mendeklarasikan port untuk LCD. Mikrokontroler akan menerima data yang
Start
Inisialisasi port serial
Masukan
data
telah diterima oleh modul Xbee PRO penerima. Data yang telah diolah oleh mikrokontroler akan dikirimkan ke LCD secara serial sebagai informasi yang diperlukan oleh pengawas Stasiun kereta api. Gambar 3.18 menunjukkan diagram alir sub rutin tampilkan data.
Gambar 3.18 Diagram alir sub rutin tampilkan data
Start
Inisialisasi port - port
Baca data
Data = 1
Kirim data ke LCD Ya
40
BAB IV
HASIL DAN PEMBAHASAN
Bab ini berisi gambar fisik hardware yang dibuat, hasil pengujian rangkaian, hasil pengambilan data, pembahasan tentang data yang diperoleh, dan pembahasan tentang program yang digunakan, baik program di bagian penerima atau program di bagian pengirim. Data yang akan dibahas terdiri dari data utama dan data pendukung. Data utama merupakan data-data yang menunjukkan tingkat akurasi antara data yang dikirim oleh pengirim dengan data yang diterima oleh penerima. Data pendukung merupakan nilai parameter setiap blok dari diagram blok. Pengujian dilakukan terhadap sistem secara keseluruhan dan pada setiap blok. Pengujian berupa pengukuran terhadap perangkat dan respon yang dihasilkan.
4.1
Implementasi alat
Hardware system terdiri atas blok rangkaian pengirim dan blok rangkaian penerima. Blok rangkaian pengirim tersusun atas sensor pemantau kecepatan, rangkaian pengkondisi sinyal, sistem minimum mikrokontroler, regulator tegangan, dan rangkaian modul XBee pengirim. Blok rangkaian penerima tersusun atas rangkaian modul xbee penerima, sistem minimum mikrokontroler, dan regulator tegangan. Gambar fisik hardware secara keseluruhan dapat pada Gambar 4.1 dan Gambar 4.2. Gambar rangkaian secara detail dapat dilihat pada Gambar 4.3 - 4.6.
Keterangan Gambar 4.1:
1. Rangkaian Modul XBee pengirim 2. Rangkaian LCD pengirim
3. Rangkaian Pengkondisi Sinyal pengirim 4. Rangkaian Regulator pengirim
5. Rangkaian Sistem minimum mikrokontroler pengirim 6. Rangkaian Sensor pengirim
Gambar 4.2. Hardware sistem penerima
Keterangan Gambar 4.2:
1. Rangkaian Modul XBee penerima 2. Rangkaian LCD penerima
3. Keypad penerima 4. Tombol Reset
5. Sumber Tegangan Xbee penerima 6. Transformator
7. Rangkaian Regulator Tegangan Penerima
4.2
Pengujian Rangkaian Xbee pengirim dan Xbee Penerima
Pengujian dilakukan dengan melihat jarak terjauh dan jarak terdekat antara pendeteksi sensor dengan stasiun penerima yang dapat dijangkau oleh Xbee pro. Hasil kecepatan dari kereta yang tertampil pada LCD pengirim di bandingkan dengan data kecepatan kereta yang tertampil pada LCD penerima. Tujuan dilakukannya perbandingan antara hasil kecepatan yang tertampil pada LCD pengirim dengan LCD penerima adalah untuk menilai apakah sistem sudah berjalan sesuai dengan perancangan dan datasheet. Data hasil kecepatan yang tertampil pada LCD pengirim dengan LCD penerima dan waktu tiba serta waktu mikrokontroler ditampilkan pada lampiran. Penghalang sensor yang terdapat pada rel kereta menjadi informasi keberadaan kereta sebelum memasuki stasiun, sehingga petugas stasiun mengetahui posisi keberadaan kereta. Jarak jangkauan adalah jarak dari ujung akhir penghalang sensor sampai ujung awal stasiun penerima. Jarak jangkauan maksimal sama dengan jarak maksimal dari modul Xbee PRO untuk bisa saling berkomunikasi dengan baik. Hasil pengujian dan diagram dan grafik Pengujian yang dilakukan dicantumkan pada Gambar 4.3 Tabel 4.1.
Gambar 4.3 Diagram pengujian Transmisi data Xbee pro
Tabel 4.1 Pengujian Transmisi data Xbee pro
NO Jarak Jangkauan (m) Transmisi Data
1 0,1 OK
2 5 OK
3 10 OK
4 20 OK
5 30 OK
Tabel 4.1 (Lanjutan) Pengujian Transmisi data Xbee Pro
NO Jarak Jangkauan (m) Transmisi Data
7 50 OK
8 60 OK
9 70 OK
10 80 OK
11 90 OK
12 100 OK
13 110 ERROR
Berdasarkan data hasil pengujian dan grafik terlihat bahwa pada jarak 100 m XBee pro masih dapat mengirim dan menerima data, dan pada jarak diatas 100 m XBee pro sudah tidak dapat mengirim dan menerima data. Data tidak dapat di terima dengan baik pada jarak di atas 100 m karena sinyal yang diterima atau yang dipancarkan telah melemah. OK adalah data kecepatan kereta api yang tertampil pada LCD kereta sama dengan data kecepatan kereta api yang diterima di stasiun penerima. ERROR adalah data kecepatan kereta api yang tertampil pada LCD kereta tidak sama dengan data kecepatan yang diterima di stasiun penerima atau stasiun penerima tidak menerima data kecepatan kereta api sama sekali.
Rangkaian pengirim dan pemancar XBee pro telah bekerja sesuai dengan spesifikasi yang dimiliki oleh XBee pro. Berdasarkan datasheet yang dimiliki oleh XBee pro, disebutkan bahwa kedua modul tersebut bekerja sampai dengan jarak maksimum 100 m untuk dalam ruangan atau keramaian, dan sampai dengan jarak maksimum 1,5 Km untuk Line of Sight ( LOS ).
Gambar 4.4 Tampilan 2.7 GHz Spectrum Analyzer Gw Instek GSP untuk spectrum frekuensi dari modul Xbee pro
Berdasarkan tampilan 2.7 GHz Spectrum Analyzer Gw Instek GSP terlihat bahwa frekuensi Start adalah 2.1 GHz, frekuensi centre adalah 2.4 GHz , frekuensi stop adalah 2.7 GHz, dan span adalah 600MHz. Frekuensi Xbee pro terlihat sebesar 2.41 GHz. Modul Xbee pro telah bekerja sesuai dengan data sheet Xbee pro dengan frekuensi masih berada dalam range frekuensi yang ditetapkan.
4.3
Pengujian data
Timer mikrokontroler
, Kecepatan dan Waktu
Tiba di Stasiun Penerima
Gambar 4.5 Tampilan LCD pengirim
Gambar 4.6 Tampilan Osiloskop Digital
Gambar 4.4 terlihat bahwa timer waktu sensor aktif pada tampilan LCD sebesar 1.5156 s. Gambar 4.5 terlihat bahwa waktu aktif sensor ( Δ) adalah sebesar 1,520 s. Nilai waktu aktif sensor tersebut di dapat dari selisih waktu antara T1 dan T2. Tujuan dilakukannya perbandingan antara timer mikrokontroler pada tampilan lcd dengan hasil waktu aktif sensor yang dilihat dari tampilan osiloskop digital adalah untuk menilai apakah sistem sudah berjalan dengan baik. Nilai error_timer, nilai error_Kecepatan, yang terjadi dihitung dengan persamaan (4.1),(4.2) sebagai berikut:
(4.1)
(4.2)
Hasil pengujian yang dilakukan dicantumkan pada Tabel 4.2
Tabel 4.2 Pengujian data Timer mikrokontroler dan Kecepatan kereta api
No
Jarak
Penghalang
Sensor(cm)
Timer mikrokontroler (s) Kecepatan(cm/s)
LCD Osiloskop Error(%) LCD Perhitungan
Osiloskop
Error
(%)
1 10 1,5156 1,520 0,29 6,60 6,5789 0,31
2 10 1,7921 1,800 0,44 5,58 5,5556 0,43
3 10 1,4480 1,445 0,21 6,91 6,9204 0,21
4 10 1,6174 1,625 0,43 6,18 6,1538 0,42
5 10 1,2532 1,250 0,26 7,98 8,0000 0,26
6 10 0,3598 0,360 0,05 27,79 27,7778 0,04
7 10 0,2568 0,256 0,31 38,94 39,0625 0,31
8 10 0,3057 0,306 0,10 32,71 32,6797 0,09
9 10 0,5734 0,570 0,59 17,44 17,5439 0,59
10 10 0,4239 0,425 0,26 23,59 23,5294 0,25
Rata – Rata 0,29 Rata-Rata 0,29
% 100 digital osiloskop Tampilan pada Timer pengirim LCD tampilan pada Timer -digital osiloskop tampilan pada Timer
_Timer x
Error % 100 n Perhitunga Kecepatan pengirim LCD tampilan pada Kecepatan -n perhitunga Kecepatan tan
_Kecepa x
Berdasarkan Tabel 4.2 Pengujian data Timer mikrokontroler dan Kecepatan kereta api data no 1 terlihat bahwa kereta api menghasilkan kecepatan sebesar 6,60 cm/s, dan perhitungan kecepatan kereta api berdasarkan waktu osiloskop sebesar 6,5789 cm/s. kecepatan kecepatan tersebut di hasilkan melalui persamaan (4.3),(4.4) sebagai berikut
(4.3)
(4.4)
Timer mikrokontroler sistem menghasilkan error rata-rata sebesar 0,29, hal ini dikarenakan pada lcd menggunakan ketelitian 4 angka di belakang koma, sedangkan pada osiloskop digital menggunakan ketelitian 3 angka di belakang koma. Kecepatan kereta api sistem menghasilkan error rata-rata sebesar 0,29. Error ini terjadi karena terdapat perbedaan atau selisih antara timer yang dihasilkan oleh mikrokontroler dengan osiloskop digital. Error yang terjadi di sisi pengirim akan berakibat juga terhadap waktu tiba kereta api di sisi penerima(Stasiun Penerima) Berdasarkan hasil pengujian, data nilai error yang terdapat pada Tabel 4.2 masih dapat ditoleransi oleh sistem karena error yang di hasilkan sangat kecil.
4.4
Pengujian Rangkaian Sensor dan Pengkondisi Sinyal
Pengujian dilakukan dengan pengukuran terhadap beberapa parameter dari rangkaian sensor dan pengkondisi sinyal (komparator) pada suatu kecepatan tertentu. Hasil pengukuran akan dibandingkan dengan hasil perhitungan teoritis pada bab perancangan. Tujuan dilakukannya perbandingan antara hasil pengukuran dengan hasil
oler Mikrokontr Timer Sensor Penghalang Jarak Api Kereta Kecepa _ _ _ _ tan_ s cm Api Kereta Kecepa 5156 , 1 10 _ tan_ s cm Api Kereta
Kecepatan_ _ 6,60 /
Osiloskop Waktu Sensor Penghalang Jarak osiloskop n berdasarka Api Kereta Kecepa _ _ _ _ _ _ tan_ s cm osiloskop n berdasarka Api Kereta Kecepa 520 . 1 10 _ _ _ tan_ s cm osiloskop n berdasarka Api Kereta
perhitungan secara teoritis adalah untuk menilai apakah sistem sudah berjalan sesuai dengan perancangan. Nilai error yang terjadi dihitung dengan persamaan (4.5) sebagai berikut:
(4.5)
Hasil pengujian yang dilakukan dicantumkan pada Tabel 4.3.
Tabel 4.3 Hasil pengujian rangkaian sensor dan pengkondisi sinyal
Kondisi Tegangan output Sensor (V) Error Tegangan output
komparator (V)
Perhitungan pengukuran
Terhalang 5 4,9 2,04 0,9
Tidak Terhalang 0 0 - 3,6
Berdasarkan hasil pengujian, data nilai error yang terdapat pada Tabel 4.3 masih dapat ditoleransi oleh sistem karena kinerja mikrokontroler sebagai selektor masih tepat.
4.5
Pembahasan Program pada Mikrokontroler
Mikrokontroler di program untuk mengatur semua proses yang ada dalam sistem.Program mikrokontroler terbagi atas
1. Program mikrokontroler sistem pengirim 2. Program mirokontroler sistem penerima
4.5.1
Program Mikrokontroler sistem Pengirim
Mikrokontroler pada bagian sistem pengirim diprogram untuk mengatur proses pendeteksian sensor, penghitungan kecepatan, dan pengiriman data secara serial ke modul XBee pro. Dalam pembuatan program langkah awal yang dilakukan yaitu penginisialisasian port sesuai dengan perancangan perangkat keras. Pin B.2 digunakan untuk input sensor, Pin C.0 sampai C.5 digunakan untuk port LCD.
LCD akan menampilkan tulisan “kecepatan kereta”, “oleh tatang”, “kec. = cm/s”, “waktu= s” yang masing masing menjelaskan judul TA dan pembuat TA serta kecepatan kereta dan waktu mikrokontroler aktif.
Fungsi tampilan akan terus tertampil di LCD,setelah melewati proses fungsi tampilan maka program akan langsung masuk ke program utama. Program utama memproses pendeteksian sensor, penghitungan kecepatan kereta api, menampilkan ke port LCD, dan mengirimkan data ke port serial (PortD 1).
Do
If P = 0 Then 'p adalah pinb.2 yaitu port input sensor
X = 0 'variabel x adalah variabel untuk menghitung overflow/cacahan
Start Timer0 'start timer0
Do
Loop Until P = 1 'menghitung timer sampai pinb.2 = 1 atau sensor sudah tidak
mendeteksi halangan lagi
Stop Timer0 'stop timer menghentikan timer
J = Tcnt0
Y = J / 255 'menghitung waktu saat berhenti sebelum mencapai overflow
Y = Y * 0.02370370 'y adalah variabel waktu saat berhenti sebelum mencapai overflow
(0.02184533 dalam "s")
Z = X * 0.02370370 'z=x*0.02184533 artinya 0.02184533 s di kalikan berapa x
overflow..
T = Z + Y 'z=z+y adalah waktu keseluruhan
V1 = S / T 'V adalah kecepatan dalam cm/s
Locate 1 , 6
Lcd " cm/s"
Locate 2 , 7
Lcd " s"
Locate 1 , 6
Lcd Fusing(v1 , "#.##") 'fusing untuk membatasi dua angka di blkg koma
Locate 2 , 7
Lcd Fusing(t , "#.####")
Printbin V1 'mengirimkan nilai V1 melalui serial
End If
4.5.2
Program Mikrokontroler sistem Penerima
Mikrokontroler pada bagian sistem penerima diprogram untuk mengatur proses pendeteksian keypad, penerimaan data kecepatan, dan pemrosesan waktu tiba kereta ke stasiun. Dalam pembuatan program langkah awal yang dilakukan yaitu penginisialisasian port sesuai dengan perancangan perangkat keras. Pin A digunakan untuk keypad, Pin C.0 sampai C.5 digunakan untuk port LCD.
LCD akan menampilkan tulisan “kecepatan kereta”, “oleh tatang”, “input jarak tempuh”, “jarak= cm” yang masing masing menjelaskan judul TA dan pembuat TA serta input jarak tempuh dan jarak yang nantinya akan diisi oleh user
Fungsi tampilan akan terus tertampil di LCD,setelah melewati proses fungsi tampilan maka program akan langsung masuk ke keypad. Mikrokontroler akan mendeteksi tombol apa yang di tekan oleh user. Mikrokontroler akan mengecek dari kolom sebelah “#”, kemudian bergeser kekolom “0” dan bergeser kekolom “*”. Setelah ada keypad yang ditekan kemudian program langsung ke gosub cek. Gosub cek mendeteksi apakah keypad yang ditekan adalah “#” (sebagai tombol cancel) jika bukan tombol “#” yang di tekan maka gusub cek akan mendeteksi berapa kali user sudah menekan tombol keypad. Program mikrokontroler akan lanjut ke gosub tampil. Gosub tampil akan memproses keypad yang sudah ditekan oleh user dan menampilkan di LCD. Fungsi terima akan dieksekusi setelah fungsi keypad selesai diproses. Fungsi terima memproses masukan data dari port serial PD 0, menghitung waktu yang ditempuh kereta sampai di stasiun.
Terima: 'fungsi terima
Cls
Locate 1 , 1
Lcd "kcptn= cm/s"
Wait 1
Locate 2 , 1
Lcd "wktu tb= s"
Do
Inputbin V 'menunggu input serial dari pengirim
T = S / V 'rumus menghitung waktu
Locate 1 , 7
Lcd "
![Tabel 2.1 Pembagian frequency band ISM menurut ITU – R [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1654263.2071174/23.595.13.574.150.745/tabel-pembagian-frequency-band-ism-menurut-itu-r.webp)
![Tabel 2.2 Lebar Frekuensi XBee PRO [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1654263.2071174/24.595.13.576.100.757/tabel-lebar-frekuensi-xbee-pro.webp)
![Gambar 2.2 Komunikasi XBee PRO [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1654263.2071174/25.595.28.565.110.721/gambar-komunikasi-xbee-pro.webp)
![Gambar 2.4 Gambar Fototransistor [8]](https://thumb-ap.123doks.com/thumbv2/123dok/1654263.2071174/27.595.34.572.88.714/gambar-gambar-fototransistor.webp)
![Gambar 2.6 Konstruksi LCD [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1654263.2071174/28.595.17.566.56.772/gambar-konstruksi-lcd.webp)
![Gambar 2.7 LCD 2 x 16 [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1654263.2071174/29.595.13.572.110.759/gambar-lcd-x.webp)

![Gambar 2.9. Peta Memori Program [11]](https://thumb-ap.123doks.com/thumbv2/123dok/1654263.2071174/32.595.32.579.237.716/gambar-peta-memori-program.webp)
![Tabel 2.6. sumber interupsi [11]](https://thumb-ap.123doks.com/thumbv2/123dok/1654263.2071174/34.595.12.578.203.723/tabel-sumber-interupsi.webp)
