LAPORAN AKHIR
PENELITIAN HIBAH BERSAING
PROTOTIPE SISTEM PENGATUR ISYARAT LALU-LINTAS ADAPTIF TERKOORDINASI UNTUK RUAS JALAN SENOPATI DAN
JALAN SULTAN AGUNG YOGYAKARTA
Tahun ke-2 dari rencana 3 tahun
Tim Pengusul:
Freddy Kurniawan, S.T., M.T. NIDN 0517037601 (Ketua)
Haruno Sajati, S.T., M.Eng. NIDN 0522078001 (Anggota 1)
Okto Dinaryanto, S.T., M.M., M.Eng. NIDN 0504107202 (Anggota 2)
Dibiayai oleh:
Direktorat Penelitian dan Pengabdian Kepada Masyarakat Direktorat Jenderal Pendidikan Tinggi
Kementerian Pendidikan dan Kebudayaan
Sesuai dengan Surat Perjanjian Pelaksanaan Hibah Penelitian bagi Dosen Perguruan Tinggi Swasta Kopertis Wilayah V Tahun Anggaran 2015
Nomor: 030/HB-LIT/III/2015 tanggal 25 Maret 2015
iii
RINGKASAN
Kemacetan lalu-lintas telah menyebabkan kerugian jutaan rupiah setiap jamnya. Kemacetan yang sering terjadi berupa antrian panjang pada setiap pengatur lalu-lintas. Salah satu penyebab kemacetan tersebut adalah tidak efektifnya pewaktuan pengatur lalu-lintas yang digunakan saat ini. Ketidakefektifan pengatur lalu-lintas yang digunakan di Indonesia disebabkan tidak dapatnya sebuah pengatur lalu-lintas mengikuti perubahan volume kendaraan.
Pada tahun pertama skim penelitian ini,telah dibuat sistem pengatur lalu-lintas dengan pengaturan waktu terjadwal dan terkoordinasi untuk persimpangan Kantor Pos, Gondomanan, dan Bintaran di Kota Yogyakarta. Sistem ini terdiri dari sebuah prototipe pengatur lalu-lintas master untuk persimpangan Gondomanan, dan pengatur lokal untuk persimpangan Kantor Pos dan Bintaran. Setiap pengatur lalu-lintas mempunyai jadwal pewaktuan pengaturan lalu-lintas yang telah disesuaikan dengan kepadatan harian dan mingguan di setiap persimpangan. Kerja kedua pengatur lokal telah dapat dikoordinasi oleh pengatur master sehingga pewaktuan keduanya telah dapat sinkron dengan pengatur master. Hasil analisis menunjukkan bahwa penggunaan sistem ini diperkirakan dapat menurunkan waktu tempuh kendaraan hingga 40 %.
Pada tahun kedua ini, sistem dikembangkan dengan menambah sifat adaptif. Sifat ini menjadikan sistem ini dapat menyesuaikan diri dengan perubahan kepadatan lalu-lintas. Waktu isyarat hijau semua arah di pengatur lalu-lintas mengikuti data kepadatan lalu-lintas kendaraan yang datang dari arah tersebut. Data kepadatan tersebut diambil dari data video streaming yang berasal dari empat kamera pemantau yang dipasang di setiap arah.
Pada penelitian ini dikembangkan metode baru untuk pendeteksian kepadatan lalu-lintas yang dapat mendeteksi semua jenis kendaraan. Pendeteksian dilakukan dengan menghitung simpangan baku histogram intensitas atas citra yang menggambarkan kondisi lalu-lintas. Citra didapat dengan mengekstrak frame video dari kamera pemantau kepadatan lalu-lintas.
Dari hasil analisis didapat bahwa nilai histogram intensitas atas citra pada area tersebut berubah dengan adanya perubahan intensitas cahaya. Namun nilai simpangan baku histogram intensitas mempunyai kecenderungan sebanding dengan kepadatan lalu-lintas dan tidak banyak terpengaruh oleh nilai intensitas cahaya yang ada. Metode pendeteksian ini dapat digunakan untuk mendeteksi kepadatan lalu-lintas dengan baik pada siang dan malam hari.
iv
PRAKATA
Puji syukur kami panjatkan ke hadirat Allah swt atas nikmat dan karunia-Nya
laporan penelitian hibah bersaing ini telah dapat kami selesaikan. Dengan telah
tersusunnya laporan ini, berarti proses penelitian dosen hibah bersaing dengan judul “Prototipe Sistem Pengatur Isyarat Lalu-Lintas Adaptif Terkoordinasi Untuk Ruas Jalan Senopati dan Jalan Sultan Agung Yogyakarta” untuk tahun kedua ini telah
selesai dilaksanakan. Diharapkan penelitian ini dapat dilanjutkan pada tahun ketiga
dengan target dapat menggunakan sistem berbasis mikrioprosesor sebagai pengganti
komputer yang berfungsi utama untuk mendeteksi kepadatan lalu-lintas.
Peneliti menyadari bahwa laporan kemajuan penelitian ini masih jauh dari
sempurna. Untuk itu segala kritik dan saran untuk kebaikan kita semua sangat kami
harapkan. Semoga hasil penelitian ini dapat bermanfaat bagi pengembangan ilmu
v
DAFTAR ISI
HALAMAN PENGESAHAN ... ii
RINGKASAN ... iii
PRAKATA ... iv
DAFTAR ISI ... v
DAFTAR GAMBAR ... vii
BAB 1 PENDAHULUAN ... 1
1.1 Latar Belakang dan Permasalahan ... 1
1.2 Perumusan Masalah ... 3
BAB 2 TINJAUAN PUSTAKA ... 4
BAB 3 TUJUAN DAN MANFAAT PENELITIAN ... 6
3.1 Tujuan Penelitian ... 6
3.2 Manfaat Penelitian ... 6
BAB 4 METODE PENELITIAN ... 7
4.1 Masukan Penelitian ... 8
4.2 Mengembangkan Perangkat Keras ... 9
4.3 Mengakomodasi Perubahan Kepadatan Lalu-lintas ... 10
4.4 Area Pendeteksian Kepadatan Lalu-lintas ... 11
4.5 Pendeteksian Kepadatan Lalu-lintas ... 12
BAB 5 HASIL DAN PEMBAHASAN ... 14
5.1 Algoritma Adaptasi ... 14
5.2 Nilai Histogram Intensitas ... 15
5.3 Fluktuasi Nilai Deviasi Standar Histogram Intensitas ... 19
BAB 6 RENCANA TAHAPAN BERIKUTNYA ... 26
6.1 Mengembangkan Program Pendeteksi Kepadatan Lalu-lintas ... 26
6.2 Mengganti Komputer dengan Modul Komputer ... 26
6.3 Target Luaran Tahun Ketiga ... 27
BAB 7 KESIMPULAN DAN SARAN ... 29
7.1 Kesimpulan ... 29
7.2 Saran ... 29
vi LAMPIRAN:
Instrumen Penelitian
Personalia Tenaga Peneliti beserta Kualifikasinya
vii
DAFTAR GAMBAR
Gambar 4.1. Diagram fishbone penelitian ... 7
Gambar 4.2. Blok diagram sistem pengatur isyarat lalu-lintas adaptif terkoordinasi ... 8
Gambar 4.3. Diagram alir penelitian ... 9
Gambar 4.4 Skema alat penelitian ... 10
Gambar 4.5 Proses hitungan mundur... 11
Gambar 4.6 Waktu pendeteksian dan angka hitungan mundur ... 11
Gambar 4.7 Denah studi kasus ... 12
Gambar 4.8 Tampilan pada video pemantau ... 13
Gambar 5.1 Grafik histogam saat tidak ada kendaraan di area deteksi pada siang hari . 16 Gambar 5.2 Grafik histogam saat banyak kendaraan di area deteksi pada siang hari .... 17
Gambar 5.3Grafik histogam saat tidak ada kendaraan di area deteksi pada malam hari ... 18
Gambar 5.4Grafik histogam saat banyak kendaraan di area deteksi pada malam hari . 18 Gambar 5.5 Grafik nilai deviasi standar histogram intensitas pada siang hari ... 20
Gambar 5.6 Grafik nilai deviasi standar histogram intensitas pada malam hari ... 24
1
BAB 1
PENDAHULUAN
1.1 Latar Belakang dan Permasalahan
Kemacetan lalu-lintas di kota Yogyakarta telah menimbulkan kerugian jutaan
rupiah (Basuki, 2008). Kemacetan biasanya berupa antrian panjang di persimpangan
yang diatur oleh alat pengatur isyarat lalu-lintas (APILL). Sementara itu, pada tengah
malam, beberapa kendaraan harus tetap menunggu di setiap pengatur lalu-lintas
meskipun tidak ada kendaraan lain yang melewati persimpangan tersebut. Terjadinya
fenomena kemacetan pada jam-jam sibuk dan adanya waktu terbuang pada malam hari
disebabkan tidak dapatnya pengatur lalu-lintas menyesuaikan dengan volume
kendaraan yang datang ke persimpangan tersebut.
Masalah tersebut telah mulai dapat diatasi dengan digunakannya sistem
pengatur isyarat lalu-lintas terjadwal dan terkoordinasi. Prototipe sistem yang telah
dibuat pada tahun pertama penelitian ini telah dapat mengatur isyarat lalu-lintas untuk
persimpangan Kantor Pos, Gondomanan, dan Bintaran sesuai jadwal. Jadwal
pewaktuan isyarat lalu-lintas yang berlaku untuk 7 × 24 jam tersebut didapat dari hasil
analisis atas data survei kepadatan kendaraan. Dari diagram trayektori kendaraan hasil
pengaturan lalu-lintas untuk ketiga persimpangan didapat bahwa sistem ini diharapkan
dapat menurunkan waktu tempuh kendaraan dari persimpangan Kantor Pos ke
Gondomanan, dan Bintaran dan sebaliknya hingga 40 %.
Dari hasil analisis atas kerja mikrontroler, pada saat menjalankan program
pengaturan isyarat lalu-lintas, memori yang digunakan mikrokontroler masih di bawah
10 % dan waktu sibuk CPU baru mencapai 1 %. Dengan kondisi ini sistem masih dapat
secara leluasa dikembangkan menjadi sistem pengatur isyarat lalu-lintas adaptif.
Pengembangan sifat adaptif didasarkan atas data jumlah kendaraan yang
didapat dari sensor kamera. Hal ini merupakan metode yang paling banyak ditempuh
oleh beberapa peneliti sebelumnya. Askerzade (2010) telah membuat implementasi
pemrosesan citra dan logika kabur untuk menghitung jumlah kendaraan yang datang,
dan mengirim data tersebut ke mikrokontroler. Selanjutnya mikrokontroler inilah yang
mengatur isyarat lalu-lintas. Rachmadi dkk. (2012) juga telah dapat mendeteksi
dengan data citra latar belakang. Dari data titik-titik yang mempunyai perbedaan cukup
signifikan dengan data titik untuk jalan, dapat ditentukan kepadatan kendaraan yang
berada pada jalan tersebut. Hongjin Zhu (2013) telah membuat sistem pendeteksian
kendaraan yang sedang bergerak menggunakan pendeteksian sisi horisontal dan auto
korelasi. Dengan metode ini dimungkinkan terdeteksinya dua kendaraan yang terekam
kamera dalam poisisi saling tumpang tindih.
Meskipun algoritma pendeteksian kendaraan telah banyak dikembangkan
(Sulaeman, 2008; Primantari, 2010; Afif, 2011, Zaman, 2011; Khairdoost at. el., 2012,
Rachmadi, 2012), namun tidak ada jaminan hasil pendeteksian kendaraan selalu akurat.
Kesalahan tersebut dapat mengakibatkan kesalahan pengaturan lalu-lintas yang
berujung pada kemacetan.
Di negara maju, sistem pengatur lalu-lintas adaptif telah banyak
dikembangkan. Sistem tersebut dapat mengatur aliran kendaraan menurut kepadatan
lalu-lintas saat itu. Sistem tersebut menggunakan beberapa sensor, di antaranya adalah
kalang induktif (ILD, Inductive Loop Detector), inframerah, atau kamera. Keberadaan
sensor tersebut untuk mendeteksi kepadatan lalu-lintas. Salah satu metode pendeteksian
yang banyak dikembangkan adalah menggunakan pengolah citra (image processing).
Metode ini menggunakan beberapa kamera sebagai sensor keberadaan kendaraan.
Sistem yang sekarang banyak digunakan di negara maju ini efektif digunakan pada
jalan yang diperuntukkan hanya bagi mobil atau kendaraan beroda empat atau lebih.
Sayangnya sistem tersebut tidak efektif digunakan di negara berkembang
seperti di Indonesia. Di negeri ini, banyak ruas jalan yang diperuntukkan bagi semua
jenis kendaraan dari bus, truk, mobil, sepeda motor, sepeda, becak, andong, dan
kendaraan tidak bermotor lain. Untuk itu diperlukan suatu metode untuk mendeteksi
semua kendaraan sehingga hasil pendeteksian kepadatan lalu-lintas dapat lebih akurat.
Salah satu keunikan penelitian ini dengan penelitian yang lain adalah
digunakannya jadwal pewaktuan sebagai acuan utama pengaturan isyarat lalu-lintas.
Data kepadatan lintas dari sensor dapat mengubah pewaktuan setiap isyarat
lalu-lintas untuk waktu tertentu dan dalam batas tertentu pula. Jika terjadi kegagalan dalam
menentukan jumlah kendaraan (misalnya karena cuaca buruk atau gangguan pada
kamera) maka sistem menggunakan acuan jadwal pewaktuan sebagai dasar untuk
1.2 Perumusan Masalah
Penelitian ini dilakukan dengan mengembangkan prototipe sistem pengatur
isyarat lalu-lintas terjadwal dan terkoordinasi untuk persimpangan Kantor Pos,
Gondomanan, dan Bintaran yang telah dibuat di tahun pertama menjadi prototipe
sistem pengatur isyarat lalu-lintas adaptif terkoordinasi. Sifat adaptif ini didasarkan dari
data jumlah kendaraan yang ditangkap oleh sensor kamera.
Beberapa masalah yang dipecahkan dalam penelitian ini adalah sebagai
berikut.
1. Bagaimana menentukan kepadatan lalu-lintas pada gambar yang ditangkap oleh
kamera?
2. Begaimana menjalankan program pendeteksian kepadatan lalu-lintas pada sistem
ini?
3. Bagaimana menambahkan sifat adaptif pada prototipe sistem pengaturan lalu-lintas
4
BAB 2
TINJAUAN PUSTAKA
Pendeteksian obyek mudah dilakukan oleh manusia tetapi merupakan
tantangan tersendiri oleh sistem berbasis computer vision. Pada dasarnya
pengembangan keilmuan computer vision adalah meniru bagaimana manusia melihat
(human vision). Akan tetapi proses peniruan ini melibatkan studi yang sangat
kompleks. Manusia melihat melalui mata yang kemudian dibawa ke otak untuk
diterjemahkan atau dikenali (Pambudi & Simorangkir, 2012). Telah cukup banyak
penelitian yang membahas mengenai sistem berbasis computer vision diantaranya
pengolahan citra, neural network, statistik, pengenalan pola, anthropometry dan
computer vision (Padilla, Filho, & Costa, 2002). Hasil pendeteksi ini dapat
dikembangkan pada aplikasi-aplikasi yang lain. Sebagai contoh pengenalan wajah atau
pola, menghitung jumlah pengunjung atau penghitung jumlah kendaraan di jalan raya
yang kemudian dapat dilanjutkan sebagai pendukung keputusan terkait prosedur
standar yang akan diterapkan.
Sejumlah penenelitian terkait telah dilakasanakan untuk pemroses citra untuk
keperluan pengatur lalu-lintas adaptif. Pada awalnya deteksi obyek dilakukan
menggunakan metode-metode deteksi tepi seperti Sobel, Prewitts atau Canni. Deteksi
tepi dengan metode-metode tersebut sangat menguras sumber daya karena tingginya
komputasi yang dilakukan picture element (pixel) demi pixel (Sajati & Astuti, 2013).
Penggunaan deteksi tepi untuk pendeteksian obyek tidak efektif pada obyek bergerak
seperti dalam format video dimana pergerakan frame dalam sebuah video dapat
mencapai 20 frame per detik (fps). Metode deteksi tepi juga tidak efektif untuk
diterapkan sebagai sistem pendeteksian obyek pada object tracking atau fast object
tracking.
Hongjin Zhu telah memperesentasikan metode pendeteksian sisi horisontal
atas kendaraan yang sedang bergerak. Dengan menggunakan auto korelasi, dapat
dideteksi keberadaan setiap kendaraan meskipun dalam citra beberapa kendaraan
terlihat saling tumpang tindih (Zhu H, at. al., 2013). Fazli (2012) telah dapat mebuat
lalu-lintas adaptif. Kemudian pada tahun 2014, Khan dan Askerzade mengimplementasikan
sebuah metode pemroses citra dan kendali berdasar logika kabur, dan mengirim
hasilnya ke sebuah mikrokontroler pengatur lalu-lintas. Dan pada tahun 2015, Sutjiadi
dkk., telah dapat mengekstrak citra latar belakang dengan Algoritma Model Gaussian
Mixture untuk keperluan pendeteksian keberadaan kendaraan.
Perkembangan terbaru untuk pendeteksian kendaraan adalah menggunakan
Casacde Haar. Chirag dan Ripal telah mengimplementasikan hal ini menggunakan
dengan 15 tingkat klasifikasi, 17 macam fitur Haar pada citra berukuran 35 × 20 titik.
Hasil pendeteksian kendaraan dapat dijadikan lebih akurat dengan menambah jumlah
sampel (Chrag dan Ripal, 2013). Kepadatan lalu-lintas dapat dihitung dengan
membandingkan setiap frame citra video dengan citra acuan yang berupa latar belakang
jalan (Abbas dkk., 2013). Lebih lanjut, pendeteksian kendaraan dan penelusuran arah
kendaraan dapat dilakukan dengan mengekstraks citra pada setiap frame dari video
tersebut (Chaple dan Paygude, 2013).
Beberapa penelitian yang difokuskan pada karakteristik lalu-lintas di
Indonesia juga telah dilakukan. Jatmiko dkk. (2010) telah mempresentasikan arsitektur
desentralisasi untuk pengatur lalu-lintas pada situasi nyata untuk persimpangan yang
tidak terstruktur seperti di Jakarta. Sementara itu, di tahun pertama penelitian ini telah
dapat terbentuk pengatur lalu-lintas yang dapat mengatur lalu-lintas sesuai jadwal
(Kurniawan, 2014).
Di antara banyak penelitian yang telah dilakukan, tidak ada yang dapat
digunakan untuk pendeteksian kendaraan di jalan yang diisi oleh bermacam-macam
kendaraan. Hampir semua kendaraan yang ada dapat diklasifikasikan, tetapi hal ini
membutuhkan sampel sangat banyak dan akan meningkatkan beban komputasi cukup
signifikan. Sistem pengatur lalu-lintas adaptif berbasis pendeteksian kendaraan berbasis
video real time yang telah diterapkan di negara maju sulit diterapkan di Indonesia. Di
negeri ini, dibutuhkan sistem pengatur lalu-lintas yang dapat mendeteksi semua jenis
BAB 3
TUJUAN DAN MANFAAT PENELITIAN
3.1 Tujuan Penelitian
Penelitian ini dilakukan dengan tujuan sebagai berikut.
1. Membuat algoritma dan program untuk menentukan kepadatan lalu-lintas pada
gambar yang ditangkap oleh kamera.
2. Menentukan perangkat keras yang dapat menjalankan program untuk menentukan
kepadatan lalu-lintas.
3. Membuat algoritma dan subprogram adaptasi, dan menambahkannya pada program
pengaturan lalu-lintas untuk persimpangan Gondomanan.
3.2 Manfaat Penelitian
Penelitian ini dibuat dengan beberapa manfaat sebagai berikut:
1. Produk ilmu pengetahuan dan teknologi, yaitu: prototipe sistem pengatur isyarat
lalu-lintas adaptif untuk persimpangan.
2. Publikasi ilmiah dalam jurnal internasional Telkomnika (terindeks Scopus) dengan
judul: “Adaptive Traffic Controller Based On Pre-Timed System”.
3. Prosiding seminar nasional RETII dengan tema: “Pendeteksian Kepadatan
BAB 4
METODE PENELITIAN
Penelitian ini dilakukan dengan mengembangkan hasil penelitian tahun
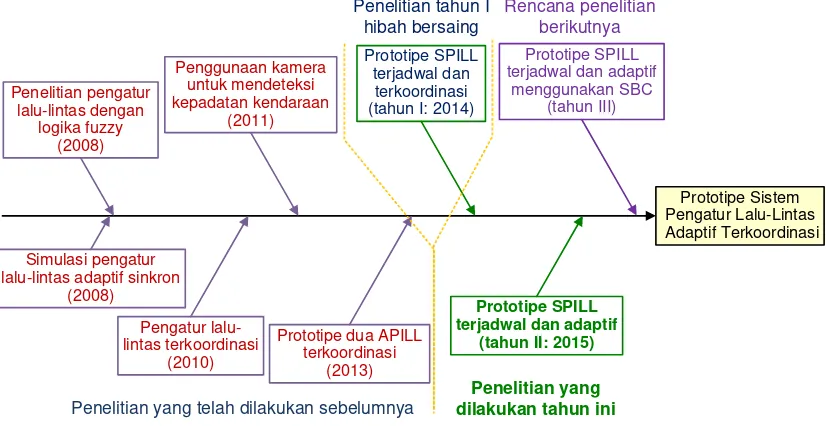
pertama. Peta jalan (road map) penelitian ketiga tahun dapat dilihat pada Gambar 4.1.
Gambar 4.1. Diagram fishbone penelitian
Pada tahun pertama telah berhasil dibuat prototipe sistem pengatur isyarat
lalu-lintas (SPILL) terjadwal dan terkoordinasi untuk persimpangan Kantor Pos,
Gondomanan, dan Bintaran. Sistem ini telah dapat mengatur lalu-lintas untuk ketiga
persimpangan sesuai jadwal pewaktuan isyarat lalu-lintas yang disimpan setiap
pengatur lalu-lintas. Jadwal yang diperoleh dari hasil analisis waktu hijau efektif untuk
ketiga persimpangan tersebut berlaku selama 7 × 24 jam.
Sebuah program Traffic Management Centre dapat digunakan operator untuk
mengubah jadwal pewaktuan ketiga pengatur lalu-lintas secara nirkabel. Program
tersebut mengirim telemommand ke setiap pengatur lalu-lintas agar mengirim jadwal ke
terminal, selanjutnya operator dapat mengedit jadwal, dan kemudian program
mengunduh kembali jadwal pewaktuan ke setiap pengatur lalu-lintas.
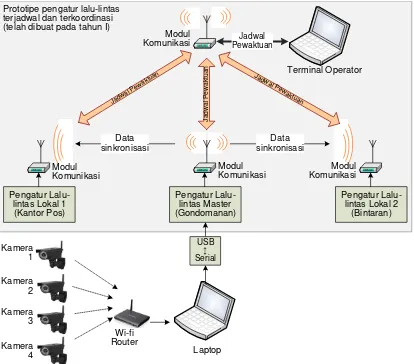
Pada tahun kedua ini, sistem dikembangkan menjadi prototipe sistem pengatur
lalu-lintas terjadwal dan adaptif. Di sini ditambahkan sensor kamera untuk mendeteksi
jumlah kendaraan yang melintas di persimpangan Gondomanan. Diagram blok sistem
ini dapat dilihat pada Gambar 4.2.
Prototipe Sistem
Penelitian yang telah dilakukan sebelumnya
Penelitian tahun I hibah bersaing
Gambar 4.2. Blok diagram sistem pengatur isyarat lalu-lintas adaptif terkoordinasi
Sistem dikembangkan dengan menambahkan empat kamera yang memantau
kedatangan kendaraan di keempat arah. Kamera tersebut dihubungkan ke sebuah wi-fi
router agar data video streaming dapat dimasukkan ke sebuah laptop. Data video
tersebut diproses di sebuah laptop untuk dihitung jumlah kendaraan. Selanjutnya data
junlah kendaraan dikirim ke pangatur lalu-lintas melalui sebuah port USB.
4.1 Masukan Penelitian
Penelitian tahun pertama telah menghasilkan beberapa luaran. Beberapa luaran
tersebut yang menjadi masukan pada penelitian di tahun kedua ini adalah sebagai
berikut.
1. Algoritma dan program pengatur isyarat lalu-lintas terjadwal dan adaptif.
2. Prototipe pengatur isyarat lalu-lintas terjadwal dan adaptif untuk persimpangan
Gondomanan. (telah dibuat pada tahun I)
3. Perhitungan dan data penurunan waktu tempuh kendaraan yang diatur oleh sistem
ini.
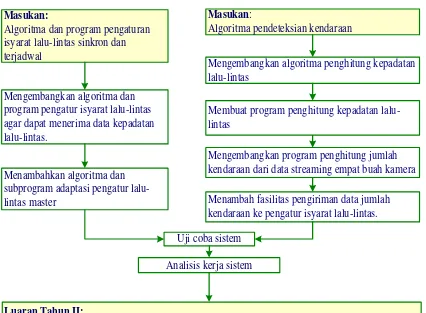
Untuk mewujudkan tujuan penelitian, urutan tahapan penelitian dibuat
mengikuti diagram alir sebagaimana Gambar 4.3.
Gambar 4.3. Diagram alir penelitian
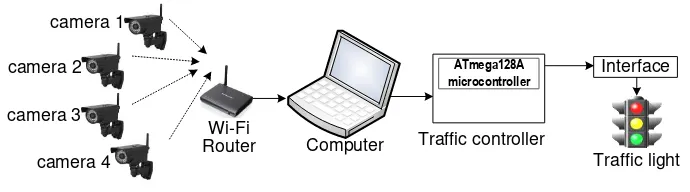
4.2 Mengembangkan Perangkat Keras
Sistem ini merupakan pengembangan sistem yang telah dibuat pada tahun
pertama. Sistem ini menggunakan mikrokontroler ATmega128A sebagai jantung dari
pengaturan isyarat lalu-lintas sebagaimana Gambar 4.4. Sistem dimofifikasi untuk
dapat beroperasi secara non-adaptif dan adaptif. Dalam kondisi non-adaptif, sistem
menggunakan data pewaktuan isyarat lalu-lintas yang tersimpan di basis data.
Sedangkan dalam kondoso adaptif, sistem tetap menggunakan data pewaktuan di basis
data, namun sistem juga dapat mengubah lama isyarat hijau sesaat mengikuti kepadatan
lalu-lintas pada setiap arah.
Menambahkan algoritma dan subprogram adaptasi pengatur lalu-lintas master
Mengembangkan algoritma dan
program pengatur isyarat lalu-lintas
agar dapat menerima data kepadatan lalu-lintas.
Masukan:
Algoritma dan program pengaturan isyarat lalu-lintas sinkron dan terjadwal
Masukan:
Algoritma pendeteksian kendaraan
Luaran Tahun II:
1. Algoritma, program dan prototipe sistem pengatur isyarat lalu-lintas terjadwal dan adaptif. 2. Algoritma dan program penghitung kepadatan lalu-lintas.
Mengembangkan algoritma penghitung kepadatan lalu-lintas
Menambah fasilitas pengiriman data jumlah kendaraan ke pengatur isyarat lalu-lintas.
Analisis kerja sistem Uji coba sistem
Membuat program penghitung kepadatan lalu-lintas
Gambar 4.4 Skema alat penelitian
Untuk dapat mendeteksi kepadatan lalu-lintas dari keempat arah kedatangan,
dipasanglah empat buah IP camera. Keempat kamera tersebut mengirim data video
kondisi (video surveillance) lalu-lintas setiap arah ke komputer melalui sebuah wi-fi
router. Untuk memperingan kerja CPU, lalu pengiriman frame ditetapkan 7 frame per detik. Di komputer, subprogram “penghitung kepadatan lalu-lintas” pada program “Traffic Management System” menghitung kepadatan lalu-lintas berdasar frame yang diterimanya.
4.3 Mengakomodasi Perubahan Kepadatan Lalu-lintas
Untuk dapat mengakomodasi perubahan kepadatan lalu-lintas, sistem dapat
mengubah waktu hijau setiap arah (lane). Pada saat sebuah arah mendapat isyarat hijau,
jika kepadatan lalu-lintas pada arah tersebut masih di atas ambang atas, maka waktu
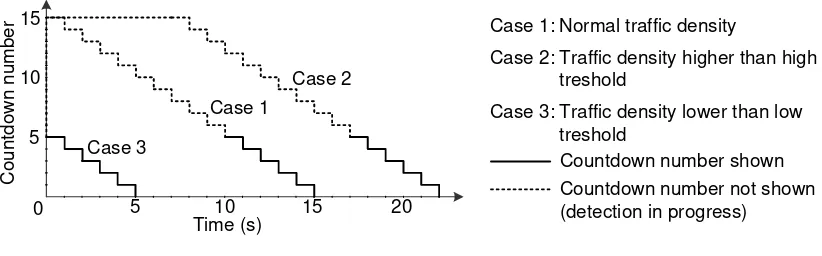
hijau dapat diperpanjang. Sebaliknya, jika kepadatan sudah di bawah ambang bawah, maka waktu tampilan hitungan mundur akan diisi dengan angka „lima‟ dan selanjutnya lima detik kemudian isyarat hijau diakhiri.
Dengan demikian, sistem mengakomodasi perubahan kepadatan lalu-lintas
pada suatu arah pada saat hitungan mundur isyarat hijau pada arah tersebut bernilai di
atas lima. Angka hitungan mundur sebuah arah akan ditampilkan pada saat hitungan
mundur bernilai kurang dari lima.
Beberapa kasus umum dapat terjadi di sini. Kasus pertama (case 1) pada
Gambar 4.5 merupakan kasus pada saat kepadatan lalu-lintas di suatu arah masih wajar,
yaitu di atas ambang bawah dan di bawah ambang atas. Kasus kedua (case 2) pada
Gambar 4.5 merupakan kondisi arah yang mendapat isyarat hijau mempunyai
kepadatan lalu-lintas lebih tinggi dari ambang atas. Pada kondisi tersebut sistem
berusaha memperpanjang waktu hijau untuk arah tersebut hingga kepadatan lalu-lintas
bernilai di bawah ambang atas atau penambahan waktu hijau telah melampaui nilai
maksimal.
camera 4 Computer
camera 1
camera 2
camera 3
Traffic controller
Interface
Traffic light Wi-Fi
Router
Gambar 4.5 Proses hitungan mundur
Kasus ke-3 (case 3) pada Gambar 4.5 merupakan kasus suatu arah mendapat
isyarat hijau, dan kepadatan lalu-lintas bernilai di bawah ambang bawah. Ini dapat
terjadi pada malam hari. Dalam kondisi ini, sistem akan langsung mengubah hitungan
mundur isyarat hijau menjadi bernilai lima dan lima detik kemudian isyarat hijau
segera berakhir.
Angka hitungan mundur isyarat hijau arah i didefinisikan sebagai gi,
sedangkan angka hitungan mundur isyarat merah arah i didefinisikan sebagai ri. Ketika
sistem mengubah nilai gi, sistem juga menyesuaikan nilai hitungan mundur isyarat
merah untuk arah lain ri dengan i≠j. Hal ini dilakukan agar hitungan mundur semua
isyarat dapat tepat. Sebagaimana terlihat pada Gambar 4.6, pada saat gi > 5, nilai gi dan
ri dengan dengan i≠j tidak ditampilkan (countdown number not shown).
Gambar 4.6 Waktu pendeteksian dan angka hitungan mundur
4.4 Area Pendeteksian Kepadatan Lalu-lintas
Sistem mendeteksi keberadaan kendaraan pada jarak sekitar 40 meter dari
marka depan lampu lalu-lintas. Dengan kecepatan rata-rata 30 km/jam, sebuah
kendaraan di daerah tersebut akan tiba di marka dengan setelah waktu 5 detik. Inilah
alasan penghitung mundur ditampilkan pada saat nilai hitungan bernilai di bawah lima. 0
Case 1: Normal traffic density
Case 2: Traffic density higher than high treshold
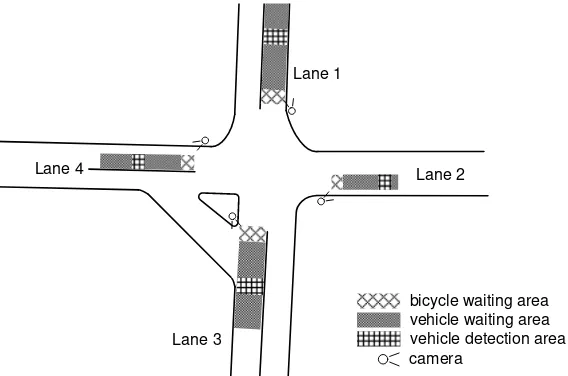
Studi kasus dilakukan di sebuah persimpangan tersibuk di kota Yogyakarta,
yaitu Gondomanan. Gambar 4.7 memperlihatkan area yang dideteksi (vehicle detection
area) beserta posisi kamera di setiap arah. Pada arah 2, 3, dan 4 terdapat prioritas “ke kiri jalan terus”, sehingga area pendeteksian kendaraan sedikit digeser ke tengah. Setiap kamera dapat menangkap gambar di area menunggu kendaraan namun program hanya
aka mendeteksi keberadaan kendaraan pada titik-titik koordinat yang ada di dalam
beberapa kotak pendeteksian.
Gambar 4.7 Denah studi kasus
4.5 Pendeteksian Kepadatan Lalu-lintas
Sebuah program untuk penghitung kepadatan lalu-lintas telah dibuat
menggunakan sebuah lingkungan pengembangan terpadu (IDE, Integrated
Development Environment) Borland Delphi 7. Program tersebut dapat menampilkan
video pemantau keadaan (video surveillance) secara real time dari keempat arah
kedatangan kendaraan dengan resolusi 320 × 240 dan laju frame 7 frame/detik.
Program menghitung deviasi standar dari histogram intensitas semua titik yang
ada pada suatu area deteksi pada citra. Area tersebut dibatasi oleh sebuah kotak yang
telah ditentukan oleh operator. Adanya kotak area deteksi ini digunakan untuk
mengantisipasi adanya area yang terlihat pada video pemantau namun tidak boleh ikut
dipertimbangkan karena bukan merupakan area kedatangan kendaraan. Area tersebut
berada sekitar 20 meter dari marka depan dan akan dipergunakan untuk data bagi
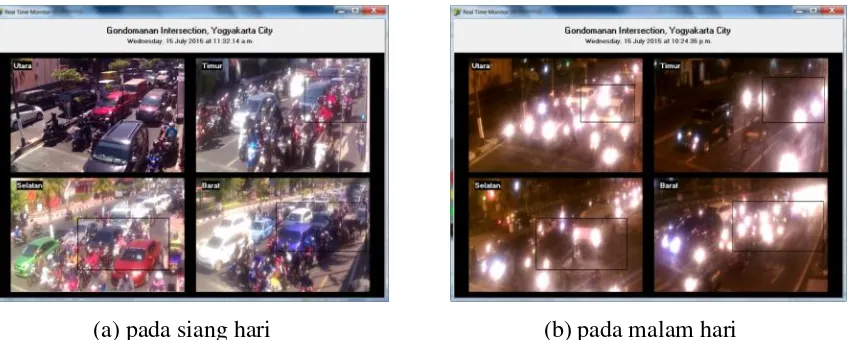
pengatur lalu-lintas adaptif pada penelitian selanjutnya. Tampilan video pemantau yang
bicycle waiting area vehicle waiting area vehicle detection area Lane 1
Lane 4
Lane 3
Lane 2
menggambarkan kondisi situasi pada siang dan malam hari beserta kotak area deteksi
setiap arah dapat dilihat pada Gambar 4.8.
(a) pada siang hari (b) pada malam hari
Gambar 4.8 Tampilan pada video pemantau
Untuk menghemat beban komputasi, meskipun data video dari kamera
berformat warna (RGB), tetapi citra hasil ekstraksi diubah dari berformat warna
menjadi berformat keabuan (grey scale). Urutan kerja pemroses citra dapat dilihat pada
Algoritma 1. Algoritma tersebut dieksekusi satu kali per detik.
Algoritma 1: Penghitungan deviasi standar histogram intensitas
1. H(k)nk
2.
N n k Η( ). k
3.
N
k
H H k
N 1
2
) (
1
Langkah pertama algoritma tersebut adalah menghitung histogram intensitas
semua titik yang tercakup di dalam area deteksi, H(k). Notasi k mewakili tingkat keabuan (0..255) dan nk mewakili jumlah titik dengan nilai keabuan k. Langkah kedua
adalah menentukan rerata nilai intensitas semua titik dalam area tersebut (μ).
Selanjutnya langkah terakhir, program menentukan deviasi standar histogram intensitas
BAB 5
HASIL DAN PEMBAHASAN
5.1 Algoritma Adaptasi
Isyarat lalu-lintas dari keempat arah dapat dibuat adaptif. Sifat adaptif ini
dilakukan dengan pendeteksian keberadaan kendaraan dari keempat arah kedatangan.
Pendeteksian keberadaaan kendaraan pada suatu arah dilakukan pada saat arah tersebut
mendapat isyarat hijau. Pada saat tersebut penampil penghitung mundur tidak
menampilkan hitungan mundur karena nilai hitungan mundur kemungkinan dapat
melompat ke nilai yang lebih kecil atau proses hitungan seakan berhenti. Dalam kondisi
ini, penampil dapat dibuat menampilkan teks berupa pesan tertentu kepada pengguna
jalan.
Subprogram adaptasi berjalan setiap detik pada saat hitungan mundur hijau
dimulai hingga hitungan mundur hijau bernilai lima. Jika subprogram pendeteksian
kendaraan memberikan hasil “tidak ada lagi kendaraan dalam antrian”, hitungan
mundur hijau fase tersebut langsung diubah menjadi bernilai lima. Dengan demikian,
lima detik kemudian isyarat pada arah tersebut berganti merah. Sebagai konsekuensi,
hitungan mundur merah fase lain juga dikurangi dengan nilai pengurangan hitungan
mundur hijau. Dalam kondisi ini waktu hijau dalam kenyataan lebih singkat daripada
waktu hijau yang terdapat dalam basis data.
Jika subprogram pendeteksian kendaraan memberikan hasil “kendaraan dalam
antrian masih padat”, maka hitungan mundur hijau fase tersebut akan ditambah satu.
Demikian pula dengan hitungan mundur merah isyarat lain, juga ditambah dengan satu.
Dikarenakan dalam setiap detik, nilai hitungan mundur selalu dikurangi satu, maka
pada kondisi ini, nilai hitungan akan terlihat tidak berubah. Dalam kondisi ini waktu
hijau dalam kenyataan lebih panjang daripada waktu hijau yang terdapat dalam basis
data.
Terdapat nilai maksimal penambahan waktu hijau setiap fase. Nilai maksimal
penambahan waktu hijau untuk fase i adalah 𝑔 i. Nilai tersebut ditetapkan 𝑔 i = ½ 𝑔i.
Mekanisme adaptasi pada saat isyarat hijau fase i mengikuti algoritma sebagai berikut:
1. Deteksi keberadaan kendaaraan
a. Hitung selisih hitungan mundur hijau fase i saat ini dengan lima,
𝑔 = 𝑔i– 5.
b. Jadikan hitungan mundur hijau fase i menjadi lima, 𝑔i = 5.
c. Tambahkan hitungan mundur merah fase selain i dengan 𝑔, rn = rn – 𝑔,
dengan n≠ i.
d. Selesai.
3. Jika kendaraan terlalu padat dan 𝑔 < 𝑔 i, maka:
a. Tambahkan hitungan mundur hijau fase i dengan satu, 𝑔i = 𝑔i + 1.
b. Naikkan nilai akkumulasi penambahan waktu hijau fase i, 𝑔 = 𝑔 + 1.
c. Tambahkan hitungan mundur merah fase selain i dengan satu, rn = rn + 1,
dengan n≠ i.
d. Selesai.
Secara umum prototipe ini telah dapat berfungsi dengan baik. Pengatur
lalu-lintas sudah dapat bekerja mengetur lalu-lalu-lintas dan juga menerima masukan dari
komputer mengenai jumlah kendaraan yang akan melintas di setiap ruas. Program juga
telah dapat menghitung jumlah kendaraan yang melintas. Hasil hitungan ini kemudian
dikirim ke pengatur lalu-lintas untuk ikut menentukan waktu hijau di suatu arah.
5.2 Nilai Histogram Intensitas
Dari hasil percobaan didapat bahwa grafik histogram dapat selalu berubah. Hal
ini tergantung dari intensitas setiap titik yang ada pada area deteksi yang telah
ditentukan. Grafik histogram citra yang ditangkap setiap kamera dapat dilihat pada
setiap jendela Monitoring untuk setiap arah.
A. Histogram pada Siang Hari
a. Saat Tidak Ada Kendaraan
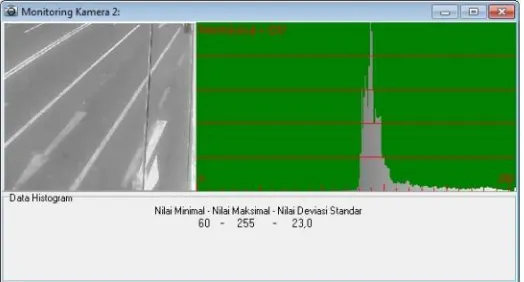
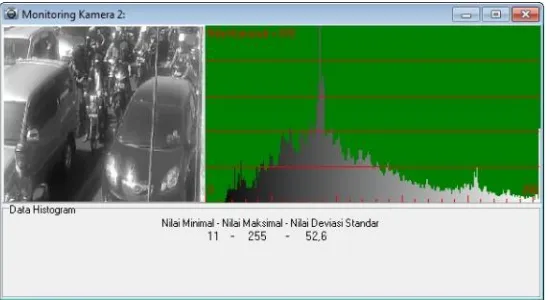
Gambar 5.1 memperlihatkan jendela Monitoring untuk arah kedatangan dari
timur di persimpangan Gondomanan pada siang hari. Jendela tersebut menggambarkan
keadaan di area deteksi dan grafik histogram intensitas semua titik yang tercakup di
Gambar 5.1 Grafik histogam saat tidak ada kendaraan di area deteksi pada siang hari
Gambar 5.1 tersebut memperlihatkan kondisi lalu-lintas setelah arah tersebut
mendapat isyarat hijau. Pada saat itu, hampir semua kendaraan dalam antrian telah
berjalan sehingga tidak ada kendaraan di area deteksi. Pada jendela tersebut dapat
dilihat tampilan video pemantau, grafik histogram dan beberapa nilai statistik penting
histogram, yaitu: nilai minimum dan maksimum intensitas histogram, dan deviasi
standar intensitas histogram.
Dari gambar tersebut terlihat bahwa pada saat tidak ada kendaraan di area
deteksi, maka semua titik pada kotak tersebut cenderung mempunyai nilai intensitas
hampir sama. Dari grafik histogram terlihat bahwa nilai intensitas sebagian besar titik
di area deteksi berkisar dari 60 hingga 255, dan nilai deviasi standar adalah 23,0.
Grafik nilai histogram merupakan komposisi warna keabuan pada jalan aspal
sebagai latar belakang. Warna aspal pada latar belakang yang cenderung hampir merata
membuat nilai histogram menjadi hampir seragam dengan nilai sekitar 130 sampai 155.
Sementara itu adanya marka jalan yang berwarna lebih cerah hingga putih membuat
adanya sebaran nilai histogram hingga 255.
b. Saat Banyak Kendaraan
Pada saat terdapat banyak kendaraan dalam antrian di area deteksi, nilai
histogram menjadi lebih menyebar. Hal ini dapat dilihat pada Gambar 5.2. Gambar
tersebut memperlihatkan kondisi lalu-lintas pada saat arah tersebut mendapat isyarat
Gambar 5.2 Grafik histogam saat banyak kendaraan di area deteksi pada siang hari
Dari gambar tersebut terlihat bahwa pada saat banyak kendaraan di area
deteksi, maka histogram intensitas cenderung mempunyai nilai menyebar. Nilai
intensitas berkisar dari 11 hingga 255, dengan nilai deviasi standar adalah 52,6. Pada
saat kondisi padat kendaraan, grafik nilai histogram intensitas merupakan komposisi
nilai keabuan warna kendaraan yang tercakup di kotak area deteksi. Nilai tersebut
cenderung lebih bervariasi daripada nilai keabuan jalan aspal tanpa kendaraan. Nilai
variasi histogram intensitas juga dipengaruhi oleh adanya bayangan setiap kendaraan.
Bayangan tersebut mempunyai warna lebih gelap dari warna sekitarnya. Variasi warna
kendaraan dan adanya bayangan kendaraan pada jalan aspal menjadi penyebab adanya
variasi nilai keabuan.
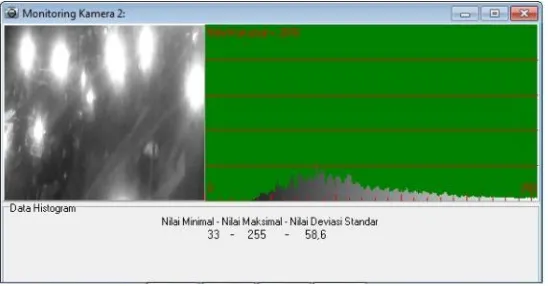
B. Histogram pada Malam Hari
a. Saat Tidak Ada Kendaraan
Bentuk grafik histogram pada malam hari tidak jauh berbeda dengan grafik
pada siang hari. Jendela monitoring pada Gambar 5.3 menggambarkan kondisi
kedatangan kedatangan kendaraan dari arah timur di persimpangan Gondomanan pada
malam hari. Pada saat itu, hampir semua kendaraan dalam antrian telah berjalan
Gambar 5.3Grafik histogam saat tidak ada kendaraan di area deteksi pada malam hari
Dari gambar histogram tersebut terlihat semua titik pada kotak tersebut
cenderung mempunyai nilai intensitas hampir sama. Nilai intensitas berkisar dari 1
hingga 54, dengan nilai deviasi standar adalah 7,3. Sebagian besar titik yang
menggambarkan warna aspal mempunyai nilai keabuan 3 hingga 15; sedangkan titik
yang menggambarkan marka jalan mempunyai nilai keabuah lebih tinggi hingga 54.
Bentuk grafik histogram pada saat tidak ada kendaraan pada malam hari (Gambar 5.3)
menyerupai grafik histogram pada saat tidak ada kendaraan pada siang hari (Gambar
5.1). Salah satu perbedaannya adalah nilai intensitas semua titik pada malam hari lebih
rendah daripada pada siang hari.
b. Saat Banyak Kendaraan
Pada malam hari, citra yang ditangkap kamera didominasi oleh warna putih
cahaya lampu kendaraan dan warna gelap selain lampu. Pada malam hari, warna
kendaraan tidak akan terlihat dengan jelas sebagaimana Gambar 5.4. Pada keadaan ini
histogram didominasi oleh warna putih dengan nilai 255. Nilai deviasi standar menjadi
lebih besar daripada pada saat tidak ada kendaraan pada area deteksi.
Nilai deviasi histogram mempunyai kecenderungan mengikuti kepadatan
lalu-lintas. Dengan semakin tingginya kepadatan lalu-lintas, maka nilai deviasi standar
histogram intensitas akan semakin besar. Program ini memang tidak dapat menghitung
jumlah kendaraan pada area deteksi yang dideteksi, namun program ini dapat
mendeteksi tingkat kepadatan lalu-lintas pada area deteksi tersebut dengan menghitung
deviasi standar histogram intensitas.
5.3 Fluktuasi Nilai Deviasi Standar Histogram Intensitas
A. Pada Siang Hari
Persimpangan Gondomanan diatur oleh sebuah pengatur lalu-lintas dengan
waktu hijau untuk arah utara, timur, selatan, dan barat adalah 30, 36, 43, dan 30 detik.
Waktu kuning dan pengosongan untuk semua arah adalah 3 dan 5 detik. Pada saat suatu
arah mendapat isyarat merah, kepadatan kendaraan terus meningkat hingga
diberikannya isyarat hijau. Antrian kendaraan yang berhenti akan memenuhi area
deteksi yang ada. Semakin lama isyarat merah yang diberikan, akan semakin banyak
kendaraan yang ada pada kotak tersebut. Pada kondisi ini, nilai deviasi standar
cenderung meningkat.
Gambar 5.5 memperlihatkan grafik fluktuasi nilai deviasi standar histogram
intensitas atas citra kedatangan kendaraan dari setiap arah pada siang hari selama 8
menit (480 detik). Pada waktu tersebut, terdapat tiga siklus pengaturan lalu-lintas. Arah
utara ditetapkan arah yang pertama mendapat isyarat hijau, diikuti dengan arah timur,
selatan dan arah barat.
(b) dari arah timur
(c) dari arah selatan
(d) dari arah barat
Gambar 5.5 Grafik nilai deviasi standar histogram intensitas pada siang hari
20
120 150 180 210 240 270 300 330 360 390 420 450 480
S
120 150 180 210 240 270 300 330 360 390 420 450 480
Dari grafik pada Gambar 5.5 tersebut terlihat bahwa, pada saat suatu arah yang
mendapat isyarat merah, nilai deviasi standar cenderung konstan karena sebagian besar
mobil atau kendaraan beroda empat lain dalam kondisi tidak bergerak. Hal ini
disebabkan padatnya lalu-lintas pada siang hari sehingga begitu isyarat merah
diberikan, kotak area deteksi langsung terisi oleh banyak kendaraan. Adanya sedikit
fluktuasi nilai deviasi standar disebabkan adanya pergerakan beberapa motor di antara
antrian mobil yang telah ada.
Peningkatan nilai deviasi standar pada saat isyarat merah pada siang hari
disebabkan bertambahnya kendaraan yang berada pada area deteksi tersebut. Warna
kendaraan pada saat terkena sinar matahari kebanyakan mempunyai nilai keabuan lebih
tinggi daripada nilai keabuan latar belakang. Sementara itu, setiap kendaraan
mempunyai bayangan. Warna bayangan kebanyakan mempunyai nilai keabuan lebih
rendah daripada latar belakang. Dua fenomena tersebut merupakan faktor utama yang
menyebabkan nilai deviasi standar menjadi lebih tinggi. Semakin banyak kendaraan
pada antrian, nilai deviasi standar mempunyai kecenderungan semakin tinggi.
Pada saat isyarat merah diberikan, nilai deviasi standar dapat berbeda. Jika
terdapat banyak motor dan sedikit mobil pada kotak area deteksi, maka nilai tersebut
biasanya menjadi besar. Ini terjadi pada saat isyarat merah arah utara detik ke-30
hingga ke-150 pada Gambar 5.5(a). Namun jika pada kotak area deteksi terdapat
beberapa mobil dengan ukuran besar dan hanya sedikit terlihat bayangan, maka nilai
deviasi standar dapat menjadi kecil. Ini terjadi pada saat isyarat merah detik ke-190
hingga ke-300 pada Gambar 5.5(a).
Pada saat isyarat merah, nilai deviasi standar untuk beberapa saat dapat
menurun, meskipun dalam kenyataannya kepadatan lalu-lintas tetap naik. Hal ini
disebabkan adanya beberapa kendaraan yang terlihat tumpang tindih di kamera
pemantau. Kondisi tumpang tindih kendaraan ini menyebabkan luas bayangan
berkurang.
Sementara itu pada saat arah tersebut mendapat isyarat hijau, kepadatan
kendaraan cenderung turun. Nilai deviasi standar cenderung turun. Penurunan tersebut
cenderung lebih berfluktuasi. Hal ini disebabkan adanya pergerakan kendaraan yang
sedang berusaha meninggalkan antrian. Pada saat-saat tertentu, nilai deviasi standar
Pada siang hari, kepadatan lalu-lintas cukup tinggi. Di arah kedatangan utara,
selatan dan timur, waktu isyarat hijau tidak cukup untuk dapat membuat semua
kendaraan dalam antrian untuk berjalan. Di akhir waktu hijau, masih ada kendaraan
dalam antrian yang belum berhasil meninggalkan antrian. Hal ini juga terlihat pada
Gambar 5.5. Pada gambar tersebut nilai deviasi standar histogram tidak dapat turun
cukup signifikan. Sementara itu, di arah kedatangan dari timur, waktu hijau dapat
membuat semua kendaraan dalam antrian dapat berjalan. Dalam kondisi ini, pada akhir
isyarat hijau nilai deviasi standar dapat turun cukup signifikan.
Dengan demikian dapat disimpulkan bahwa, nilai deviasi standar histogram
pada siang hari di setiap arah kedatangan pengatur lalu-lintas berfluktuasi mengikuti
kepadatan lalu-lintas. Pada saat diberikan isyarat merah, nilai tersebut cenderung
konstan. Sementara itu pada waktu diberikan isyarat hijau, nilai deviasi standar
cenderung lebih kecil. Hal ini disebabkan kepadatan pada waktu hijau lebih rendah
daripada pada waktu merah. Pada saat isyarat hijau, nilai tersebut juga cenderung lebih
bervariasi karena adanya perubahan jumlah kendaraan karena setiap kendaraan akan
bergerak dan berusaha meninggalkan antrian.
B. Pada Malam Hari
Nilai deviasi standar histogam intensitas citra di keempat arah kedatangan di
persimpangan Gondomanan dapat dilihat pada Gambar 5.6. Pola fluktuasi nilai deviasi
standar histogam intensitas pada malam hari hampir sama dengan pada siang hari.
Namun nilai tersebut cenderung lebih rendah karena variasi nilai keabuan pada malam
hari lebih sedikit daripada siang hari. Secara visual hal ini tampak jelas pada gambar
tampilan pada video pemantau untuk siang dan malam hari di Gambar 4.8(a) dan (b).
Variasi warna citra pada siang hari lebih banyak daripada malam hari.
Pada malam hari, kepadatan lalu-lintas lebih rendah daripada siang hari. Pada
saat diberikan isyarat merah, dapat dipastikan selalu ada pergerakan kendaraan, baik
yang baru datang maupun kendaraan yang sedang antri. Hal ini terlihat dengan
berfluktuasinya nilai deviasi standar pada saat isyarat merah. Hal ini jelas terlihat pada
detik ke-275 hingga detik ke-310 arah utara di Gambar 5.6(a) dan detik ke 330 hingga
390 arah selatan di Gambar 5.6(c). Pada saat itu kendaraan baru datang beberapa detik
barat pada Gambar 5.6(d). Pada arah tersebut, dapat dipastikan bahwa terdapat
kedatangan kendaraan beberapa saat setelah diberikan isyarat merah.
Perlu diperhatikan di sini bahwa, program tidak menghitung nilai deviasi
standar atas citra yanng mewakili semua kendaraan dalam antrian. Namun hanya citra
yang ada dalam kotak area deteksilah yang dihitung. Pada beberapa kasus dapat terjadi
sebuah kedatangan kendaraan yang telah terdeteksi akan menjadi tidak terdeteksi
karena telah ada di posisi antrian paling depan dan tidak masuk ke kotak area deteksi.
(a) dari arah utara
120 150 180 210 240 270 300 330 360 390 420 450 480
S
120 150 180 210 240 270 300 330 360 390 420 450 480
(c) dari arah selatan
(d) dari arah barat
Gambar 5.6 Grafik nilai deviasi standar histogram intensitas pada malam hari
Pada malam hari, waktu isyarat hijau hampir selalu dapat menjadikan semua
kendaraan dalam antrian untuk berjalan. Bahkan sesuai dengan grafik nilai deviasi
standar untuk arah utara dan selatan pada Gambar 5.6(a) dan Gambar 5.6(b), waktu
hijau untuk arah selatan dan barat cenderung terlalu lama. Pada kedua arah ini, antrian
kendaraan telah habis 10 hingga 20 detik sebelum isyarat hijau berakhir. Fenomena ini
akan lebih mudah dianalisis dengan melihat rekaman nilai deviasi standar daripada
melihat rekaman video lalu-lintas secara langsung.
Dengan demikian, rekaman nilai deviasi standar histogram intensitas dapat
dijadikan data kuantitatif yang dapat mencerminkan nilai kepadatan kendaraan. Data ini
juga dapat dijadikan acuan untuk menentukan waktu hijau setiap arah pada pengatur
lalu-lintas di persimpangan Gondomanan dan persimpangan-persimpangan lain. Lebih 0
120 150 180 210 240 270 300 330 360 390 420 450 480
jauh lagi, data ini diharapkan nantinya dapat dijadikan data untuk menentukan waktu
BAB 6
RENCANA TAHAPAN BERIKUTNYA
6.1 Mengembangkan Program Pendeteksi Kepadatan Lalu-lintas
Pada penelitian di tahun kedua ini telah berhasil dibuat sebuah program yang
adapat mendeteksi kepadatan lalu-lintas di jalan. Program ini dapat diterapkan untuk
jalan raya yang berisi semua jenis kendaraan. Metode pendeteksian dilakukan dengan
cara menghitung simpangan baku histogram intensitas keabuan semua titik di area
deteksi. Metode ini telah dapat digunakan dengan baik pada siang dan malam hari.
Metode pendeteksian ini dilakukan dengan menganalisis citra jalan. Semua
oyek yang ada di jalan akan dianalisis. Jika pada suatu saat jalan raya terisi obyek
bukan berupa kendaraan tetapi orang atau benda lain, maka obyek tersebut akan juga
dianalisis oleh program. Program juga belum diuji dengan adanya tambahan derau pada
citra. Derau dapat berupa hujan atau kabut yang menghalangi pandangan kamera. Agar
sistem ini dapat diterapkan dengan baik, maka sistem harus diuji dengan adanya oyek
lain selain kendaraan dan derau.
Pada tahun ketiga penelitian ini, akan dilakukan penyempurnaan metode
pendeteksian kepadatan sehingga obyek selain kendaraan tidak akan dianalisis oleh
sistem. Dengan demikian sistem harus dapat membedakan obyek kendaraan baik
bermotor maupun tidak bermotor dan obyek bukan kendaraan baik itu obyek di jalan
atau derau dari hujan dan kabut. Pengembangan metode ini menggunakan perangkat
lunak MATLAB.
6.2 Mengganti Komputer dengan Modul Komputer
Pada penelitian ini, program penghitung simpangan baku histogram intensitas
dijalankan di sebuah komputer. Dalam aplikasi di lapangan, penggunaan komputer
sebagai pemroses citra menjadikan adanya permasalahan baru dari segi keamanan.
Untuk itu, pada penelitian selanjutnya, program tersebut akan dijalankan di sebuah
Gambar 6.1 Skema alat penelitian
Modul komputer tersebut merupakan sebuah miniatur komputer. Modul ini
terdiri dari prosesor, RAM, I/O dan media penyimpanan non-volatile berupa SD Card
atau MMC. Modul ini diharapkan dapat menjalankan program pendeteksian kepadatan
sebagaimana komputer. Lebih jauh lagi modul ini diharapkan dapat sekaligus
menjalankan fungsi sebagai pengatur lalu-lintas secara sinkron dan terjadwal
menggantikan mikrokontroler ATmega128A.
6.3 Target Luaran Tahun Ketiga
Target luaran tahun terakhir ini diharapkan merupakan suatu prototipe suatu
sistem pengatur isyarat lalu-lintas yang dapat diterapkan di persimpangan Gondomanan
dan atau persimpangan lain. Sistem tersebut mempunyai keunggulan sebagai berikut.
1. dapat dibuat sinkron dengan pengatur lalu-lintas di persimpangan sebelahnya,
2. dapat mendeteksi kepadatan lalu-lintas baik di siang maupun malam hari,
3. pengaturan lalu-lintas dapat dijadikan adaptif berdasar kepadatan lalu-lintas saat itu,
4. dapat menyimpan data kepadatan lalu-lintas agar data tersebut dapat dianalisis lebih
29
BAB 7
KESIMPULAN DAN SARAN
7.1 Kesimpulan
Dari pembahasan yang telah dipaparkan di muka dapat diambil beberapa
kesimpulan berikut:
1. Pengatur lalu-lintas adaptif dapat dibentuk dari mikrokontroler ATmega128A.
2. Nilai deviasi standar histogram intensitas akan cenderung semakin tinggi dengan
naiknya kepadatan lalu-lintas.
3. Pola perubahan nilai deviasi standar saat diberikan isyarat merah dan hijau pada
siang hari menyerupai pola perubahan nilai tersebut saat diberikan isyarat merah
dan hijau pada malam hari.
4. Dari rekaman nilai deviasi standar dapat ditentukan pola perubahan kepadatan
lintas pada suatu arah kedatangan di persimpangan yang diatur oleh pengatur
lalu-lintas.
7.2 Saran
Pada penelitian selanjutnya, hasil rekaman nilai deviasi standar dapat
dijadikan acuan untuk menentukan pewaktuan sebuah pengatur lalu-lintas adaptif.
30
DAFTAR PUSTAKA
Abbas N., Tayyab M., Qadri MT. Real Time Traffic Density Count using Image
Processing. Internatrional Journal of Computer Application. 2013; 83(9):
16-19.
Sutjiadi R, Setyadi E, Lim R, 2015, Adaptive Background Extraction for Video Based
Traffic Counter Application Using Gaussian Mixture Models Algorithm.
TELKOMNIKA Indonesian Journal of Electrical Engineering, Vol. 13, No. 3,
hal. 1006-1013
Afif, Al., Faris, Rachmadi, M. Febrian, Ma‟sum, M. Anwar, Wibowo, Adi, Jatmiko, Wisnu, 2011, Implementasi Sistem Pengaturan Lampu Lalu Lintas
Terdistribusi dengan Optimasi Pengenalan dan Penjejakan Kendaraan Berbasis
Pemrosesan Video, Prosiding Konferensi Nasional Sistem dan Informatika, 12
November, Bali.
Askerzade IN, Mahmood M. Control the Extension Time of Traffic Light in Single
Junction by Using Fuzzy Logic. International Journal of Electrical &
Computer Sciences IJECS – IJENS. 2010; 10(2): 48-55
Basuki, Imam, Siswandi, 2008, Biaya Kemacetan Ruas Jalan Kota Yogyakarta, Jurnal
Teknik Sipil, Vol. 9 No. 1, Oktober, hal. 71 – 80, ISSN 1411-660X.
Chaple M., Paygude SS. Vehicle Detection and Tracking from Video Frame Sequence.
International Journal of Science & Engineering Research. 2013; 4(3): 1-7.
Chirag I.P., Ripal P. Counting Cars in Traffic Using Cascade Haar with KLP.
International Journal of Computer and Electrical Engineering. 2013; 5(4):
435-437.
Dobre, Ciprian, 2012, Using Intelligent Traffic Lights to Reduce Vehicle Emissions,
International Journal of Innovative Computing, Information and Control, Vol.
8, No. 9.
Fazli S., Mohammadia S., Rahmani M. Neural Network based Vehicle Classification
for Adaptive Traffic Control. International Journal of Software Engineering &
Hanggara, Yoga, 2012, Urai Macet, Tambah ATCS, Situs Resmi Dishubkominfo DIY,
25 Juli, online:
http://dishub-diy.net/perhubungan/urai-macet-tambah-atcs.html, diakses 22 Februari 2013.
Khairdoost, Nima, S., Monadjemi, Amirhassan, Davarzani, Zohreh, Jamshidi, Kamal,
2013, GA Based PHOG-PCA Feature Weighting for On-Road Vehicle
Detection, International Journal of Information and Electronics Engineering,
Vol. 3, No. 1, January,p. 104-108.
Khan BA, Lai NS. An Advanced Fuzzy Logic based Traffic Controller. International
Journal of Innovation in the Digital Economy. 2014; 5(1): 31-40.
Kurniawan, F., Dermawan, D., Dinaryanto, O., Irawati, M., 2014, Pre-Timed and
Coordinated Traffic Controller Systems Based on AVR Microcontroller,
TELKOMNIKA Indonesian Journal of Electrical Engineering, 12(4), p. 787 –
794.
Kurniawan, Freddy, Adiprasetya, Rahmad Al Hasibi, 2007, Konsep pengatur lalu-litas
Adaptif terkoordinasi Kepadatan untuk Solusi Minimalisasi Durasi Waktu
Tunggu Kendaraan, Jurnal Ilniah Semesta Teknik, Vol. 10, No. 2, November,
ISSN 1411-061X, hal. 126 – 135.
Nadernejad E., Sharifzadeh S., Hassanpour H., 2008, Edge Detection Techniques:
Evaluations and Comparisons, Applied Mathematical Sciences, Vol. 2, no. 31,
pp. 1507 – 1520.
Primantari, Luky FA, 2010, Koordinasi Pengaturan Lampu Lalu Lintas (Studi kasus:
Ruas Jalan Prof. Dr. Sorharso - Adi Sucipto - A.Yani - Adi Soemarmo), Jurnal
Teknik Sipil dan Arsitektur, Vol. 8 No. 12.A, ISSN 0852-2561, hal. 13 – 30. Rachmadi, M. Febrian, F. Al Afif, M. Anwar Ma‟sum, M. Fajar, and A. Wibowo,
2012, Beagleboard Embedded System For Adaptive Traffic Light Control
System with Camera Sensor, Journal of Computer Science and Information,
Vol. 5, Issue 2, ISSN 2088-7051, hal. 63 – 71.
Sajati, H., Astuti, Y., 2013, Analisis dan Perancangan Software untuk Menentukan
Warna Kendaraan Gelap dan Terang, Jurnal Ilmiah Angkasa, Vol. 5, No. 2,
Sulaeman, Yaya, Hercuadi, Asep Yudi, Syamsu, Iqbal, 2008, Model Pengatur Lampu
Lalu-lintas dengan Metal Detektor berbasis Mikrokontroler Atmega8535,
Jurnal Elektronika, Vol. 8, No. 2, Juli – Desember, hal. 76 – 80.
Zaman, Big, Jatmiko, Wisnu, Wibowo, Adi, Ima, Elly Matul, 2011, Implementation
Vehicle Classification On Distributed Traffic Light Control System Neural
Network Based, Proceedings International Conference on Advanced Computer
Science and Information System (ICACSIS), p. 107-112, ISBN:
978-979-1421-11-9, Desember.
Zhu H, Fan H, Guo S., 2013. Moving Vehicle Detection and Tracking in Traffic Images
based on Horizontal Edges. TELKOMNIKA Indonesian Journal of Electrical
Engineering, 11(11): p. 6477-6483.
Jatmiko W, Azurat A, Wibowo AH, Marihot H, Wicaksana M, Takagawa I, Sekiyama
K, Fukuda T., 2010, Self-Organizing Urban Traffic Control Architecture with
Swarm-Self Organizing Map in Jakarta: Signal Control System and Simulator,
International Journal on Smart Sensing and Adaptive Systems, Vol. 3, No. 3,
Lampiran 1
1. Prototipe pengatur lalu-lintas yang terbuat dari komponen: a. Mikrokontroler ATmega128A
b. Traffic Controller Board c. RTC DS1307
3 buah
2. Modul komunikasi KYL-1020U dan antena 4 buah
3. Downloader PL2303 1 buah
4. Laptop:
a. Acer Aspire 29302:
i. Intel Pentium dual core processor 2.0 GHz 800 MHz FSB 2 MB L2 cache
ii. 250 GB HDD iii. 2 GB RAM b. Perangkat Lunak
i. 32-bit operating system Windows 7 Home Edition
ii. Code Vision AVR Version 2.05.3 Standar Edition
iii. Protues Version 7
1 buah
5. Kamera SJ6000 dengan spesifikasi: - Screen: 2.0LTPS
- Lens: 170degree A+ Wide angle lens - Video record: 1080P(1920*1080)
30FPS/720P(1280*720) 30FPS/720P(1280*720) 60FPS/VGA(640*480) 30FPS
- Video format: AVI
- Compression format: H.264
- Image resolution: 14M/12M/8M/5M - Storage card: Micro SD
- Image shotting mode: Single-line/timer self portrait/(2S/5S/10S)/Continuous shotting
- WiFi system support: iOS6.1 or above, android 4.0 or above
- WiFi function: image transmission, remote control, setting, album synchro and share
- Light source frequency: 50HZ/60HZ - USB 2.0
- Power: 5V 1A
- Battery capacity: 900mAh
- Power consumption: [email protected] - Video record time: 1080P/90mins
- Min illumination 0.5 Lux - Video/Image: Motion JPEG
- Up to 30(NTSC) / 25(PAL) fps at 640x480, 320x240, 160x120
- Built-in microphone
- Audio Compression: G.711 PCM, 8 kHz, 64 kbit/s - Standard Protocol: TCP/IP, DHCP, PPPoE, ARP, ICMP,
FTP, SMTP, DNS, NTP, UPnP, RTSP, RTP, RTCP, HTTP, TCP, UDP, 3GPP/ISMA RTSP
- Wireless data rate: IEEE 802.11 b/g/n , Up to 150Mbps - Frequency: 2.4-2.4835GHz
- Wireless Encryption: 64/128/152-bit WEP / WPA / WPA2,WPA-PSK / WPA2-PSK
7. D-Link Wireless N300 Cloud Router
- IEEE 802.11n, IEEE 802.11g, IEEE 802.3, IEEE 802.3u - Device Interface: 4 10/100 LAN Ports, 1 10/100 WAN
Port
- Security: Wi-Fi Protected Access (WPA, WPA2)® - Advanced Firewall Features: Network Address
Translation (NAT), Stateful Packet Inspection (SPI), VPN Pass-through / Multi-sessions PPTP / L2TP / IPSec - Device Management: Internet Explorer® v7 or Later;
Mozilla Firefox® v3.0 or Later; or other Java-enabled Browsers
- Certifications: FCC Class B, IC, Wi-Fi®, IPv6 Gold
Lampiran 2
1 Nama Lengkap (dengan gelar) Freddy Kurniawan, S.T., M.T. L
2 Jenis Kelamin L
3 Jabatan Fungsional Lektor
4 NIK 030131
5 NIDN 0517037601
6 Tempat dan Tanggal Lahir Yogyakarta, 17 Maret1976
7 E-mail [email protected]
8 Nomor Telepon/ HP (0274) 411244 / 08122702432
9 Alamat Kantor Jl. Janti, Blok R, Kompleks Lanud Adisutjipto,
Yogyakarta
10 Nomor Telepon/Faks (0274) 451262 / (0274) 451265
11 Lulusan yang telah Dihasilkan S1=21 orang S2 = - orang S3= - orang
12 Mata Kuliah yg diampu
1. Teknik Digital
Bidang Ilmu Teknik Elektro Teknik Elektro -
Tahun Masuk 1994 2005 -
Konsep Pengatur Lalu Lintas Sinkron Adaptif Kepadatan
1. Ir. Budi Setyanto 2. Dr. Ir. Th Sri Widodo
1. Ir. Samiadji Herdjunanto, M.Sc.
2. Ir. Sujoko Sumaryono, M.T. -
C. Pengalaman Penelitian Dalam 5 Tahun Terakhir
No. Tahun Judul Penelitian Pendanaan
Sumber* Jml (Juta Rp)
1 2014 Prototipe Sistem Pengatur Isyarat
Lalu-Lintas Adaptif Terkoordinasi untuk Ruas Jalan Senopati dan Jalan Sultan Agung Yogyakarta
Dikti (Hiber tahun I)
Gondomanan Dan Bintaran
3 2012 Sistem Pemonitor Daya dan Faktor Daya
Listrik Berbasis Mikrokontroler
Internal STTA 1,5
4 2011 Impementasi Pengukur Nilai Tegangan dan
Arus RMS Jala-Jala Listrik Berbasis Mikrokontroler ATmega8535
Internal STTA 1.0
5 2010 Analisis Ketepatan Pengukur Nilai Arus
RMS Jala-Jala Listrik Berbasis Mikrokontroler ATmega8535
Kopertis V 1,675
6 2010 Implementasi Penghitung Nilai Tegangan
RMS Jala-Jala Listrik Berbasis Mikrokontroler ATmega8535
Internal STTA 1.0
D. Pengalaman Pengabdian Kepada Masyarakat Dalam 5 Tahun Terakhir
No. Tahun Judul Pengabdian Kepada Masyarakat Pendanaan
Sumber* Jml (Juta Rp)
1 2013 Pelatihan Pembuatan Quadcopter Mode X
dengan Wireless Camera STTA 0,5
2 2011 Perancangan Robot Line Follower STTA 0,34
3 2010 Membuat Robot Line Follower STTA 1.0
4 2008 Pengenalan Teknologi Informasi dan
Komputer STTA 1.0
E. Publikasi Artikel Ilmiah Dalam Jurnal Dalam 5 Tahun Terakhir
No. Judul Artikel Ilmiah Nama Jurnal Volume/
Nomor/Tahun
1 Pre-Timed and Coordinated Traffic Controller
Systems Based on AVR Microcontroller
Jurnal Internasional
“Telkomnika”
Vol. 12, No. 4, Desember 2014
2 Prototipe Sistem Pengatur Isyarat Lalu-Lintas
Terkoordinasi untuk Simpang Empat Gondomanan dan Bintaran
Jurnal
“Teknologi” Vol. 7, No. 1, Juni 2014
3 Sistem Akuisisi Data Berbasis Mikrokontroler Jurnal Ilmiah
“Angkasa”
Vol. 4, No. 2, November 2012
4 Implementasi Pengukur Nilai Tegangan RMS
Jala-jala Listrik berbasis Mikrokontroler
Jurnal Ilmiah
“Angkasa”
Vol. 3, No. 1, Mei 2011
5 Pembangkit Frekuensi Rendah Presisi berbasis
Mikrokontroler
Jurnal Ilmiah
“Angkasa”
7 Implementasi Pengukur Frekuensi dan Beda Fase Tegangan dan Arus Jala-jala Listrik berbasis Mikrokontroler AVR
8 Pemodelan Sistem Pembangkit Listrik Hibrida
berbasis Energi Angin dan Matahari
Jurnal Ilmiah
“Semesta Teknik”
Vol. 12, No. 2, November 2009
F. Pemakalah Seminar Ilmiah (Oral Presentation) dalam 5 Tahun Terakhir
No. Nama Pertemuan Ilmiah /
Seminar Judul Artikel Ilmiah
Waktu dan
Sistem Pengatur Lalu-lintas Terjadwal dan Terkoordinasi
3 Seminar Penelitian
Internal
Impementasi Pengukur Nilai Tegangan Dan Arus RMS Jala-Jala Listrik Berbasis Mikrokontroler ATmega8535
2011, STTA Yogyakarta
4 Seminar Penelitian
Internal
Implementasi Penghitung Nilai Tegangan RMS Jala-Jala Listrik Berbasis Mikrokontroler ATmega8535
2010, STTA Yogyakarta
G. Karya Buku dalam 5 Tahun Terakhir
No. Judul Buku Tahun Jumlah
I. Pengalaman Merumuskan Kebijakan Publik/Rekayasa Sosial Lainnya dalam 5 Tahun Terakhir
No. Judul/Tema/Jenis Rekayasa Sosial
Lainnya yang Telah Diterapkan Tahun
Tempat Penerapan
Respons Masyarakat
institusi lainnya)
No Jenis Penghargaan
Institusi Pemberi Penghargaan
Tahun
1 Dosen Favorit STTA STTA
Yogyakarta 2011
2 Dosen Pembimbing Lomba Kontes Muatan
Roket Indonesia (lolos seleksi peluncuran) Dikti 2011
3 Dosen Pembimbing Lomba Kontes Muatan
Roket Indonesia (lolos seleksi peluncuran) Dikti 2010
4 Dosen Pembimbing Lomba Kontes Muatan
Roket Indonesia (lolos seleksi peluncuran) Dikti 2009
Semua data yang saya isikan dan tercantum dalam biodata ini adalah benar dan dapat dipertanggungjawabkan secara hukum. Apabila di kemudian hari ternyata dijumpai ketidak-sesuaian dengan kenyataan, saya sanggup menerima sanksi.
Demikian biodata ini saya buat dengan sebenarnya untuk memenuhi salah satu persyaratan dalam laporan Penelitian Hibah Bersaing.
Yogyakarta, 6 November 2014 Ketua Peneliti,
1 Nama Lengkap Haruno Sajati, S.T., M.Eng.
2 Jenis Kelamin L
3 Jabatan Fungsional Asisten Ahli
4 NIP 040941
5 NIDN 0522078001
6 Tempat dan Tanggal Lahir Yogyakarta, 22 Juli 1980
7 E-mail [email protected]
8 Nomor Telepon / HP (0274) 414422 / 08386857876
9 Alamat Kantor Jl. Janti, Blok R, Kompleks Lanud Adisutjipto,
Yogyakarta
10 Nomor Telpon/Fax (0274) 451262, Faks. (0274) 451265
11 Lulusan yang Telah Dihasilkan S1 = 130 orang
12 Mata Kuliah yg Diampu 1. Keamanan Jaringan Komputer
2. Pemrograman Web
3. Sistem Basis Data 4. Arsitektur Komputer
5. Teknik Pemrograman
B. Riwayat Pendidikan
S1 S2
Nama PT Universitas Gadjah Mada Universitas Gadjah Mada
Bidang Ilmu Teknik Elektro Teknik Elektro
Tahun Masuk - Lulus 2002 – 2005 2010 – 2012
Judul Penelitian Membangun Koneksi
berbasis IPv6 pada Redhat dan FreeBSD
Pemodelan Lingkungan Virtual untuk Interaksi Avatar Berbasis Context Pada Proyek Digital Life at Campus (DiL@C)
Nama Pembimbing Sri Suning Kusumawardhani,
S.T., M.T.
Ir. Sujoko Sumaryono, M.T.
Ir. Lukito Edi Nugroho, M.Sc. Ph.D
Dr. Ridi Ferdiana, S.T., M.T.
C. Pengalaman Penelitian dalam 5 Tahun Terakhir
No. Tahun Judul Penelitian Pendanaan
Sumber Jml
1. 2011 Monitoring Jaringan Berbasis Snmp (Simple
Network Management Protocol) Pada Server Linux
STTA Rp. 1.000.000
2. 2012 Pemodelan Testbed Generic-Contect
Menggunakan Framework Avatar Pada Virtual Environment
4 2013 Analisis Dan Perancangan Software Pengenalan Pola Menggunakan Metode Deteksi Tepi Sobel Untuk Menentukan Warna Kendaraan Gelap Dan Terang
5 2014 Analisa Pemrosesan Paralel Untuk Kompresi
Video Pada Jaringan Komputer Berbasis IPv6
Penelitian Dosen Pemula
Dikti
Rp. 12.000.000
D. Pengalaman Pengabdian Kepada Masyarakat dalam 5 Tahun Terakhir No. Tahun Judul Pengabdian Kepada Masyarakat Pendanaan
Sumber Jml
1. 2011 Pelatihan Komputer Microsoft Office, Internet Browsing Dan Desain Grafis Menggunakan Corel Draw Bagi Karang Taruna Jogja Taruna Tama
STTA Rp. 2.000.000
2. 2012 Pelatihan Pengenalan Desain Grafis Bagi Siswa-Siswi SMP Negeri 3 Berbah Sleman
STTA Rp. 1.500.000
3 2013 Pelatihan Desain Pesawat Terbang 3 Dimensi bagi Siswa Siswi SMA Negeri I Banguntapan Yogyakarta
STTA Rp. 3.000.000
4 2014 Pelatihan Ms Access 2007 Bagi Anak-Anak Panti Asuhan Nurul Haq Gedong Kuning Banguntapan Yogyakarta
STTA Rp. 3.000.000
E. Publikasi Artikel Ilmiah Dalam Jurnal Dalam 5 Tahun Terakhir
No Nama Pertemuan Ilmiah/
Seminar
Judul Artikel Ilmiah Waktu dan Tempat
1 Seminar Nasional
Teknologi Informasi dan Kedirgantaraan
Perancangan Dan Analisa Perbandingan Antara Delay
Dan Throughput Pada
Video Streaming
Menggunakan IPv4 Dan IPv6 Tunneling
STTA 3 Desember 2013
2 Seminar Hasil Penelitian Dosen Pemula
Analisis Dan Perancangan Software Pengenalan Pola
Menggunakan Metode
Deteksi Tepi Sobel Untuk
Menentukan Warna
Dosen Pemula Untuk Kompresi Video Pada Jaringan Komputer Ipv6
2014
F. Pemakalah Seminar Ilmiah (Oral Presentation) Dalam 5 Tahun Terakhir
No. Nama Pertemuan
Ilmiah/Seminar
Judul Artikel Ilmiah Waktu dan Tempat
G. Pengalaman Penulisan Buku dalam 5 Tahun Terakhir
No. Judul Buku Tahun Jumlah
Halaman Penerbit
- - - - -
H. Perolehan HKI dalam 5 – 10 Tahun Terakhir
No. Judul/Tema HKI Tahun Jenis Nomor P/JD
- - - - -
I. Pengalaman Merumuskan Kebijakan Publik/Rekayasa Sosial Lainnya dalam 5 Tahun Terakhir
No. Judul/Tema/Jenis Rekayasa Sosial
Lainnya yang Telah Diterapkan Tahun
Tempat Penerapan
Respons Masyarakat
- - - - -
J. Penghargaan dalam 10 tahun Terakhir (dari pemerintah, asosiasi, atau institusi lainnya)
No Jenis Penghargaan
Institusi Pemberi Penghargaan
Tahun