1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Pengukuran dalam geodesi dapat diaplikasikan untuk pemantauan terhadap kemungkinan pergeseran pada suatu obyek. Pemantauan pergeseran dilakukan terus-menerus dalam interval waktu tertentu.Dalam mengamati pergeserantersebut perlu ditentukan titik-titik pantau yang disebar pada lokasi yang mewakili obyek. Titik-titik tersebut diamati perubahan posisinya dalam sistem koordinat tertentu. Salah satu alat yang digunakan untuk mengamati pergeseran tersebut adalah Total Station. Stasiun berdiri alat ukur itu diposisikan pada suatu titik ikat pengamatan kemudian dilakukan pengukuran jarak dan sudut ke titik-ttik pantau.Kerangka yang digunakan dalam pengamatan adalah kerangka dasar absolut yaitu titik ikat berada pada lokasi yang tidak mengalami pergeseran dan koordinat (X,Y) titik ikat tersebut dianggap fixed.
Pada penelitian ini, yang dijadikan obyek pemantauan pergeseran adalah tailing
dam atau wadah penampungan limbah sisa proses penambangan untuk memperoleh bijih
(ore) emas. Satu ton ore emas hanya mengandung Au 9 gr/ton dan Ag 96 gr/ton (ANTAM, 2014), dan sisanya merupakan limbah. Karena pembuangan limbah ini terus berlangsung seiring proses produksi perusahaan, maka volume limbah yang dihasilkan juga akan berjumlah besar sehingga perlu pengelolaan limbah secara kontinyu dan akurat.Tailing dam yang dijadikan obyek pada penelitian ini berkategori rockfill dam, atau dapat dikatakan bahwa tubuh dam tersebut menggunakan struktur yang terdiri dari lapisan batuan luar, lapisan transisi, lapisan penyaring dan inti dam. Gambaran tailing
dam dapat dilihat di Lampiran A. Titik pantau berjumlah sembilan yang berposisi pada
lapisan batuan luar sepanjang tubuh dam dari utara ke selatan. Titik kontrol berlokasi pada gedung pantau tailing dam dan pada ujung utara tailing dam.
Dalam mengantisipasi pergeseran pada tailing dam, maka dilakukan pemantauan secara berkala untuk mengetahui ada tidaknya pergeseran yang terjadi. Dengan mengetahui nilai pergeseran tubuh tailing dam, perusahaan dapat mengurangi resiko kecelakaan kerja akibat longsoran maupun pergeseran,dengan demikian kerugian materiil dan nyawa dapat diminimalisir. Manfaat dalam pemantauan pergeseran tersebut bagi warga sekitar adalah apabila terjadi kemungkinan overtopping dan keboocoran tubuh tailing dam, hal tersebut dapat dideteksi lebih dini.
Pemantauantailing damoleh perusahaandilakukan menggunakan Total Station untuk menentukan koordinat tiap kala.Selama ini hitungan pergeseran dilakukan dengan mengurangi nilai koordinat antar kala.Pada interval Juni s/d Juli 2013 rerata perbedaan koordinat absis adalah 0,0162 m, dan Juli s/d Agustus 2013 adalah 0,0659 m. Seharusnya dalam analisis pergeseran diperlukan suatu strategi pengolahan agar diperoleh suatu nilai apabila terjadi perbedaan, nilai tersebut bukan dikarenakan kesalahan pengukuran. Oleh karena itu perlu dilakukan analisis pergeseran secara komprehensif.
I.2. Identifikasi Masalah
PT. Aneka Tambang (Persero) Tbk telah melakukan pemantauan titik pantau dilakukan secara berkala tiap bulan.Hasil pengukuran jarak dan sudut terhadap titik pantau diperoleh nilai koordinat (X,Y) tiap bulannya. Dalam menentukan pergeseran yang sudah dilakukan dengan menyelisihkan nilai koordinat (X,Y) titik pantau pada satu kala ke kala lainnya. Dari metode tersebut, nilai koordinat yang dihasilkanbukan merupakan nilai terbaik karena langsung menggunakan data ukuran yang masih mungkin mengandung kesalahan tak acak. Oleh karena itu perlu dilakukan pengolahan data agar dapat diperoleh nilai koordinat dengan ketelitian tinggi untuk analisis pergeseran.
I.3. PertanyaanPenelitian
Mengacu pada latar belakang dan identifikasi masalah, maka pertanyaan penelitiannya adalah seberapa besar pergeserandan kecepatan pergeseran yang terjadi pada titik-titik pantau, lalu bagaimana pula dengan pola pergeserannya ?
I.4. Cakupan Penelitian Cakupan penelitian ini meliputi :
1. Lokasi yang dikaji pada tailing damutama PT. Aneka Tambang (Persero) Tbk.yang berlokasi di Kecamatan Nanggung, Desa Cikaret, Kabupaten Bogor, Jawa Barat.
2. Data pengamatan diperoleh dari pengukuran secara terestris 2D di lapangan menggunakan Total Station dalam kalapengamatan Juni, Juli dan Agustus 2013.
3. Posisi (koordinat) titik ikat dianggap fixed atau tidak berubah.
4. Analisis yang dilakukan hanya berdasarkan pendekatan aspek geodesi tanpa melibatkan pendekatan aspek geoteknik atau aspek fisik lain.
5. Estimasi koordinat titik pemantauan pergeseran menggunakan hitung kuadrat terkecilminimum constraint dan analisis pergeseranmenggunakan uji kesebangunan jaring dan uji pergeseran titik pantau.
I.5. Tujuan Penelitian
Tujuan penelitian ini adalah untuk menentukan arah dan besar pergeseran serta kecepatan pergeseran pada titik-titik pantau jaring pemantauan pergeseran tailing
I.6. Manfaat Penelitian
Penelitian ini diharapkan dapat diketahui besar, arah serta kecepatan pergeseran pada titik-titik pantau tailing dam utama. Setelah diketahui pergeserannya, perusahaandapat menentukan langkah prefentif terhadap kemungkinan longsoran (failure)dan pergeseran yang akan berdampak kerugian nyawa maupun materil.
I.7. Tinjauan Pustaka
Dalam penelitian yang dilakukan di PT. Aneka Tambang (Persero) Tbk., terdapat beberapa tulisan di perpustakaan perusahaan perihal tailing dam, namun belum terdapat tulisan dengan topik deformasi titik pantau.
Febriani A. (2009) melakukan penelitian terkait analisis gerakan massa tanah di saluran induk Kalibawang, dengan membandingkan pengukuran titik pantau periode tahun 2006 sampai periode selanjutnya tahun 2007. Analisis data menggunakan hitung kuadrat terkecil metode parameter minimum constraint. Analisis pergeseran menggunakan metode geometrik statik. Pergeseran yang terjadi untuk arah vertikal negatif terjadi penurunan sebesar 3,314 mm s/d 30,982 mm, sedangkan pergeseran arah vertikal positif atau kenaikan berkisar antara 1,784 mm s/d 128,261 mm.
Diyono (1993) menentukan pergeseran tiga dimensi dengan pendekatan Calgary dengan studi kasus Bendungan Panglima Besar Soedirman. Hasil analisis pergeseran tiga dimensi menunjukkan pergeseran 0,022 cm pada pengukuran bulan April 1989 dan 5,838 cm untuk pengukuran bulan Januari 1993. Pengukuran tersebut menggunakan titik referensi sama dan tidak mengandung kesalahan kasar. Sesuai dengan uji lokal pergeseran, kondisi titik pengamatan tersebut masih stabil.
Penelitian Bintoro C. (2006) di perusahaan tambang PT. Adaro Indonesia terhadap jaring kontrol GPS dengan empat kombinasi titik sekutu. Analisis data pengamatan menggunakan hitung kuadrat terkecil metode parameter. Parameter transformasi rotasi terhadap sumbu X 00 31’ 22,83”, sumbu Y -10 6’ 2,57’, dan terhadap sumbu Z 00 3’ 35,62”. Translasi terhadap sumbu X 2805,30 m, sumbu Y -5419,40 m, dan sumbu Z
276,77 m, dengan faktor skala 0,9999942. Hasil ini diupload ke controller GPS agar dalam survei GPS diperoleh sistem koordinat lokal.
Penelitian Putra G.W. (2013) terhadap pergerakan lereng tambang PT. Adaro Indonesia pada 13 titik pantau. Perhitungan koordinat untuk epok yang berbeda menggunakan perataan kuadrat terkecil metode parameter.Hasil hitung kuadrat terkecil menunjukkan antar epok mempunyai pergeseran horisontal pada komponen X (X3, X4, X10) dan vertikal untuk semua komponen Z dalam fraksi sentimeter. Pergeseran horisontaal tersebut secara statistik dengan tingkat kepercayaan 95% tidak berbeda signifikan.
I.8. Landasan Teori I.8.1. Tailing Dam
Tailing dam atau wadah penampungan limbah dibagi menjadi dua kategori utama
berdasarkan jenis tanah yang digunakan sebagai meterial konstruksinya, yaitu earthfill
dam dan rockfill dam. Untuk earthfill dam, tubuh dari dam itu sendiri yang digunakan
sebagai struktur konstruksi dan penahan terhadap longsoran dengan memanfaatkan fasilitas drainase. Berbeda dengan earthfill dam, rockfill dam pada bagian tubuh sebagai penahan longsoran menggunakan struktur yang mengandung batuan luar, zona transisi dan zona inti. Zona transisi digunakan untuk mengantisipasi lapisan tanah yang dapat tergerus akibat erosi dari limbah yang ditampung (Narita, K., 2000). Pada penelitian ini,
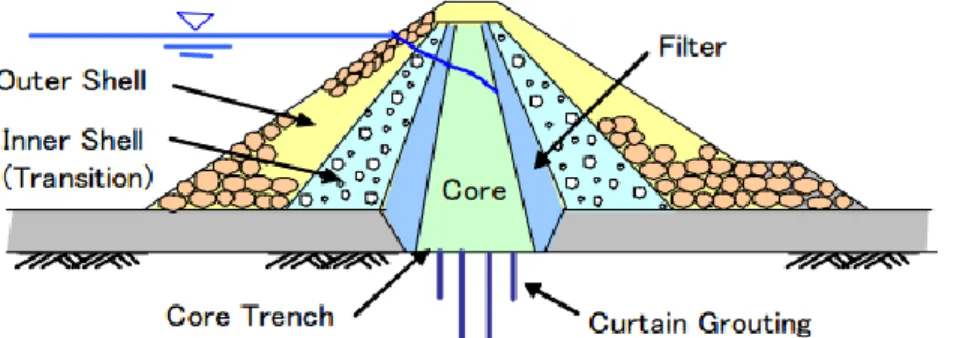
tailing dam sebagai obyek berkategori rockfill dam. Gambar (I.1) berikut menjelaskan
penampang melintang tailing dam jenis rockfill dam.
Keterangan Gambar (I.1).
Outer shell : lapisan terluar dam
Inner shell : lapisan transisi
Core : inti dam
Filter : lapisan penyaring
Core trench : parit inti
Curtain grouting : batas galian
I.8.2. Survei Deformasi
Definisi deformasi merupakan suatu perubahan kedudukan atau pergerakan suatu titik pada suatu benda secara absolut maupun relatif, dan lebih dipandang dari segi tektonik akibat adanya pergerakan lempeng. Titik bergerak absolut bila dievaluasi dari titik lain dan perubahan kedudukannya berdasar pada suatu sistem koordinat referensi yang digunakan (Widjajanti, N., 2001). Parameter-parameter deformasi yang merupakan fungsi dari pengamatan geodetik,salah satunya adalah pergeseran. Terdapat dua jenis kerangka dasar yang dapat diaplikasikan untuk pemantauan pergeseran (Chrzanowski, dkk., 1986) yaitu :
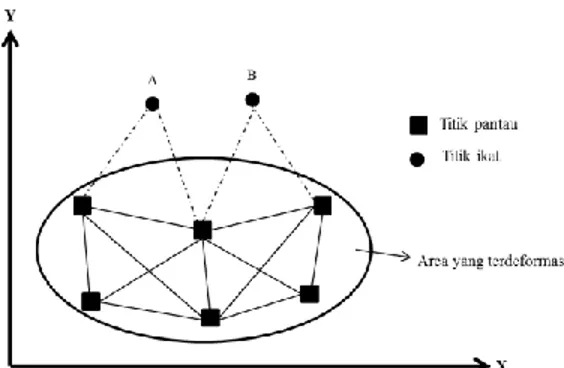
1. Kerangka dasar absolut
Kerangka dasar absolut merupakan kerangka dimana titik-titik ikat yang digunakan sebagai titik referensi berada di luar obyek pengamatan pergeseran dan posisinya dianggap stabil. Contoh sketsa kerangka dasar absolut dapat dilihat pada Gambar (I.2) berikut.
2. Kerangka dasar relatif
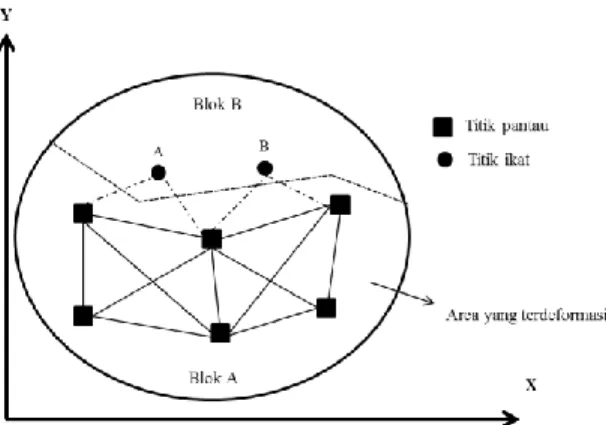
Kerangka dasar relatif adalah suatu kerangka yang titik-titik obyeknya berada di dalam area pengamatan pergeseran. Pada kerangka dasar relatif, posisi titik-titik obyek deformasi berada dalam area pengamatan yang tidak stabil, sehingga titik-titik obyek tersebut menglami perubahan. Contoh sketsa kerangka dasar relatif dapat dilihat pada Gambar (I.3) berikut.
Gambar I.3. Sketsa kerangka dasar relatif(modifikasi Widjajanti, N., 2001) Tujuan analisis pergeseran dua kala adalah (Caspary, W.F., 1987) :
1. Memastikan kestabilan titik referensi dan mendeteksi pergerakan titik tunggal. 2. Memberikan gambaran mengenai vektor pergeseran untuk membentuk model
pergeseran
3. Memberikan informasi mengenai pergeseran yang terjadi.
Analisis deformasi merupakan kuantifikasi pergeseran dan parameter-parameter deformasi yang mempunyai karakteristik dalam ruang dan waktu (Chrzanowsky, dkk, 1986). Analisis deformasi harus dilaksanakan berulang pada kala yang berbeda. Pengukuran maupun pengolahannya dilakukan dari dua kala. Berdasarkan hasil pengukuran diperoleh nilai perbedaan koordinat titik pantau sehingga parameter-parameter deformasi dapat ditentukan (Widjajanti, N.,2001).
I.8.3. Hitung Perataan Kuadrat Terkecil
Metode yang umum digunakan dalam perhitungan estimasi parameter adalah hitung perataan kuadrat terkecil. Pada metode ini nilai parameter yang akan ditentukan harus memiliki hubungan linier dengan besaran pengukuran (Hadiman, 1991). Persamaan yang menghubungkan keduanya disebut persamaan pengamatan. Dalam hitung perataan, jumlah pengamatan melebihi jumlah parameter yang akan ditentukan nilainya (Ghilani, C. dan Wolf, P.R., 2008). Rumus untuk menghitung derajat kebebasan
(f) seperti pada persamaan (I.1) :
f = n – u ... (I.1)
Dalam hal ini,
n : jumlah pengamatan u : jumlah parameter
Dalam hitung perataan metode parameter, jumlah persamaan yang ditentukan sama dengan jumlah pengukuran. Model fungsional pada metode parameter (Mikhail dan Ackerman 1981) seperti pada persamaan (I.2)
La = F(Xa) ... (I.2)
Dalam hal ini,
La : besaran estimasi terbaik pengamatan
Dengan La = L + V, maka persamaan (I.2) menjadi persamaan (I.3) :
L + V = F(Xa) ... (I.3)
Hubungan fungsional antara besaran pengukuran dan parameter dilakukan dengan membuat sejumlah n persamaan pengamatan, sehingga diperoleh persamaan (I.4) :
+ = + + ... + + ... (I.4) Selanjutnya, dapat diperoleh persamaan (I.5) dalam fungsi residu (v) seperti persamaan (I.5) berikut.
= + + ... + + - ... (I.5) Persamaan (I.5) dapat ditulis dalam bentuk matriks seperti persamaan (I.6) berikut(Hadiman, 1991).
V = AX + F ... (I.6)
Dalam hal ini,
= ; = ; = ; =
V : vektor koreksi yang elemen matriksnya terdiri dari besaran-besaran koreksi pengamatan (v1, v2, ..., vn) dengan dimensi n x 1
A : matriks koefisien parameter yang elemen matriksnya terdiri dari koefisien-koefisien parameter (a1,1, a1,2, ..., an,u) dengan dimensi n x u
X : vektor parameter yang elemen matriksnya terdiri dari parameter-parameter yang akan ditentukan nilainya (x1, y2, ..., yn) dengan dimensi u x 1
F : vektor sisa yang elemen matriksnya terdiri atas selisih dari tiap konstanta persamaan linier (a1,1, a1,2, ..., an,u) dengan besaran pengamatan ( , , ...,
) yang bersesuaian dengan dimensi u x 1
Proses hitungan jika menggunakan matriks bobot (P) maka jumlah kuadrat residualnya (VTPV) dapat dicari dengan persamaan (I.7) :
VTPV = (AX+F)T P (AX+F)
= (XTAT+FT)P(AX+F)
= XTATPAX + XTATPF + FTPAX + FTPF ... (I.7)
Oleh karena matriks VTPV berdimensi 1 x 1, maka XTATPF = FTPAX. Oleh karena itu
persamaan (I.7) menjadi persamaan (I.8) :
VTPV = XTATPAX + 2FTPAX + FTPF ... (I.8)
Supaya nilai VTPV minimum maka turunan pertama VTPV terhadap vektor parameter (X)
harus sama dengan nol. = 0
2XTATPA + 2FTPA = 0
Oleh karena P merupakan matriks diagonal maka PT= P, sehingga persamaan (I.9) bila ditranspos menjadi persamaan (I.10) :
ATPAX + ATPF = 0... (I.10)
Selanjutnya, diperoleh persamaan (I.11) untuk mencari nilai parameter, yaitu :
X= - (ATPA)-1ATPF ... (I.11)
Persamaan (I.12) untuk mencari matriks varian kovarian parameter ( ), yaitu : = (ATPA)-1 ... (I.12) Dalam hal ini,
= ... (I.13) : varian aposteori
Akar unsur-unsur diagonal matriks merupakan simpangan baku dari tiap-tiap parameter yang bersesuaian.
I.8.4. Hitung Perataan Minimum Constraint
Rank suatu matriks didefinisikan sebagai dimensi tertinggi dari suatu matriks
sehingga determinannya tidak nol. Suatu matriks bujur sangkar berorde n dikatakan mempunyai kekurangan rank bila matriks tersebut memiliki rank lebih kecil dari n. Kekurangan rank ini merupakan selisih dari dimensi matriks tersebut dengan rank matriks itu sendiri.
Hitung perataan minimum constraint adalah hitung perataan dengan jumlah unsur yang diketahui (referensi) sebanyak kekurangan rank nya. Rank suatu matriks didefinisikan sebagai dimensi tertinggi dari suatu matriks sehingga determinannya tidak nol. Kekurangan rank ini merupakan selisih dari dimensi matriks tersebut dengan rank matriks itu sendiri. Dalam kaitannya dengan aplikasi di bidang Geodesi, kekurangan
rank disebabkan karena belum terdefinisikannya sistem koordinat (Soeta’at, 1996).
Matriks yang mempunyai kekurangan rank merupakan matriks singular yang tidak bisa diinverskan.
Persamaan (I.11) dalam hitung perataan metode parameter digunakan untuk menghitung nilai parameter (X). Jika matriks ATPA dalam persamaan itu merupakan
matriks singular, maka ATPA tidak dapat diinverskan. Hal ini menyebabkan persamaan
(I.11) tidak akan mungkin diselesaikan, akibatnya nilai parameter (X) tidak bisa dihitung. Salah satu dari solusi untuk menyelesaikan permasalahan tersebut adalah dengan mendefinisikan unsur yang diketahui sebanyak kekurangan rank nya.
Pada penelitian ini digunakan metode minimum constraint dengan titik ikat fixed yaitu P28 yang mengikat kesembilan titik pantau, selain itu digunakan pula titik ikat
fixed BS1 yang diikatkan pada titik pantau PG1 dan PG9.
I.8.5. Bobot pengamatan
Ketelitian suatu pengamatan nilainya bervariasi tergantung yang dilakukan dari suatu proses pengamatan. Berdasarkan hal tersebut, dalam pengolahannya harus diperhitungkan nilai ketelitiannya dengan suatu besaran bobot pengamatan (Hadiman, 2006). Pemberian bobot pengukuran biasanya berdasarkan kaidah umum bahwa bobot suatu pengukuran berbanding terbalik dengan variannya :
= ... (I.14) Dalam hal ini, k adalah nilai apriori sebagai pembanding varian pengamat. Bila suatu pengukuran mempunyai bobot sama dengan satu maka varian pengukuran sama dengan nilai varian apriori , maka :
1 = ... (I.15) Dari persamaan (I.14) dan (I.15) diatas diperoleh persamaan (I.16) sebagai berikut.
P = ... (I.16) Dalam hal ini,
: varian apriori
I.8.5.1. Bobot pengukuran sudut horisontal. Varian sudut seperti pada persamaan (I.17) berikut (Mikhail dan Ackerman, 1981).
... (I.17) Dalam hal ini,
: varian sudut ukuran
: kesalahan pada pemusatan alat ukur dan target : kesalahan pemusatan target satu dan target dua
: kesalahan pemusatan alat ukur D1,D2 : jarak ke target satu dan dua
: sudut ukuran : 206265”
: kesalahan pembacaan skala piringan horisontal
:
: 3 x d
d : pembacaan terkecil piringan horisontal : kesalahan akibat pembidikan
:
: 60”/M
M : perbesaran teropong
: kesalahan akibat penempatan target
:
: ketelitian target n : jumlah pengamatan
bjik
αik
αij
dik
dij
I.8.5.2. Bobot pengukuran jarak horisontal. Nilai varian bobot pengukuran jarak digunakan untuk menyusun matriks bobot (P). Nilai varian pengukuran jarak dihitung dengan persamaan (I.18) berikut (Mikhail dan Ackerman, 1981).
... (I.18) Dalam hal ini,
: varian jarak pengukuran
: ketelitian yang tidak tergantung jarak pengukuran : ketelitian relatif alat (ppm)
D :jarak ukuran (km)
I.8.6. Linierisasi Persamaan Pengamatan
Pengamatan yang digunakan berupa data sudut horisontal dan jarak horisontal, yang selanjutnya dilinierisasi seperti penjelasan berikut.
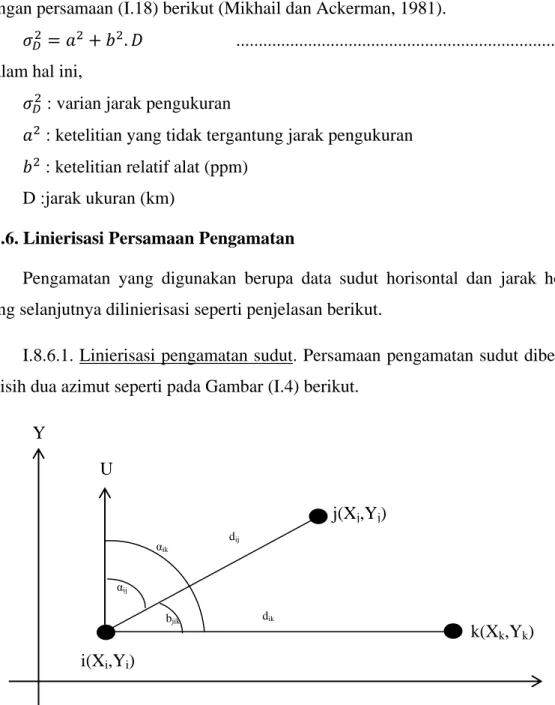
I.8.6.1. Linierisasi pengamatan sudut. Persamaan pengamatan sudut dibentuk dari selisih dua azimut seperti pada Gambar (I.4) berikut.
Gambar I.4. Sketsa pengukuran sudut dan jarak horisontal Keterangan Gambar (I.4) :
i, j, k : titik yang membentuk segitiga dalam sistem koordinat kartesi 2D (X,Y) Y X i(Xi,Yi) j(Xj,Yj) k(Xk,Yk) U
: asimut dari titiki ke k : asimut dari titik i ke j
: sudut horisontal yang terbentuk dari titik i, j dan k , : jarak horisontal dari titik i ke j dan dari titik i ke k
Model matematis pengukuran sudut seperti persamaan (I.19) berikut (Basuki, S., 2006). + = - ... (I.19)
= - ... (I.20) = F (
Linierisasi model matematis pengukuran sudut dengan deret Taylor adalah seperti persamaan (I.21) berikut.
+ = + + + + +
+ F( , , , , , ... (I.21) Dalam hal ini,
= - ... (I.22) = - ... (I.23) = - (I.24) = - + ... (I.25) = ... (I.26) = - ... (I.27) F( , , , , , : harga pendekatan koordinat i, j, k
: nilai koreksi sudut
I.8.6.2. Linierisasi pengamatan jarak.Model matematis pengamatan jarak seperti pada persamaan (I.28) berikut (Basuki, S., 2006).
= ... (I.28) Linierisasi persamaan (I.28) dengan deret Taylor sehingga diperoleh persamaan (I.29) berikut.
Dik + = + + + + ... (I.29) Dalam hal ini,
= ... (I.30) = ... (I.31) = ... (I.32) = ... (I.33)
: nilai pendekatan jarak : koreksi pengamatan
: nilai pendekatan jarak hitungan I.8.7. Kriteria Berhentinya Iterasi
Dalam hitung kuadrat terkecil apabila diperoleh persamaan pengamatan yang tidak linier, maka penyelesaiannya harus dilakukan menggunakan deret Taylor. Setelah persamaan tersebut dilinierkan, agar diperoleh nilai parameter terbaik maka dalam penyelesaiannya perlu digunakan diiterasi. Apabila melakukan hitung perataan dengan suatu iterasi perlu dipertimbangkan untuk menghentikan iterasi, dengan kriteria sebagai berikut.
1. Usaha untuk mencapai sedekat mungkin suatu jawaban terhadap penyelesaian teoritis untuk menghentikan iterasi
2. Tidak ekonomis bila iterasi dilanjutkan akan tetapi hanya merubah ketelitian yang sangat kecil.
Ada beberapa kriteria penghentian iterasi, antara lain (Mikhail dan Ackerman, 1981). 1. Berdasarkan faktor akar varian aposteori
<
- < < Dalam hal ini,
, , : nilai toleransi yang ditentukan i : indeks iterasi (ke-i)
2. Berdasarkan pada nilai koreksi parameter (Xi)
a. Nilai koreksi tiap parameter (Xi) harus mendekati nol. Dalam hal ini ∑
mempunyai nilai kecil yang digunakan untuk menguji. < ∑
b. Menguji maksimum nilai koreksi parameter < ∑
c. Menguji perubahan nilai koreksi parameter yang sesudahnya dengan parameter sebelumnya.
< ∑
Dalam beberapa kasus digunakan bentuk berbeda seperti pada persamaan (I.34) berikut. < ∑ ... (I.34) Pada kenyataannya sulit menentukan nilai dan ∑ yang didaptkan secara empiris. I.8.8. Perataan Terpisah Masing-masing Kala
Perataan menggunakan beberapa kala untuk pergeseran dapat dituliskan sebagai model linierisasi seperti persamaan (I.35) dan (I.36) berikut.
Xm = (AmTPmAm)-1 AmT PmFm ... (I.35)
= + Xm ... (I.37)
= + Xn ... (I.38)
sehingga :
= (AmTPmAm)-1 ... (I.39)
= (AnTPnAn)-1 ... (I.40)
I.8.9. Uji Statistik Data Pengamatan Tiap Kala
Dalam uji statistik, dilakukan evaluasi kesesuaian antara varian aposteori ( ) dengan nilai varian apriori ( ). Uji ini dilakukan terhadap data pengamatan hasil hitung perataan parameter setiap kala pengukuran dengan uji global dan data snooping.
I.8.9.1. Uji global. Uji global digunakan untuk memastikan ada atau tidaknya kesalahan tidak acak yang berpengaruh pada data pengamatan setelah dilakukan hitung perataan. Uji global dilakukan dengan membandingkan nilai varian aposteori ( ) dengan nilai varian apriori ( ), menggunakan sebaran fungsi Fisher (Mikhail dan Ackermann, 1981).
Hipotesis pada uji global seperti pada persamaan (I.41) dan (I.42) berikut.
: = ... (I.41) : ≠ ... (I.42) Penerimaan bila memenuhi syarat persamaan (I.43) berikut :
< ... (I.43) Dalam hal ini,
: nilai statistik dari tabel Fisher dengan derajat signifikan ( ) dan derajat kebebasan (r)
Penerimaan menyatakan bahwa hasil pengukuran tidak dipengaruhi oleh kesalahan tidak acak, sehingga memenuhi sebaran normal. Penolakan merupakan indikasi adanya kemungkinan pengukuran dipengaruhi kesalahan tak acak sehingga
terjadi perubahan nilai rata-rata dan pengukuran tersebut tidak mengikuti sebaran normal. Jika dari hasil uji data pengamatan ternyata dipengaruhi kesalahan tak acak, maka kesalahan tersebut dicari dengan data snooping.
I.8.9.2. Data snooping. Data snooping dilakukan jika uji global ditolak. Apabila dalam uji global hipotesis nol ditolak, hal tersebut berarti ada data pengamatan yang mungkin dipengaruhi oleh kesalahan kasar/blunder.Dalam mendeteksi ada tidaknyakesalahan tidak acak, dilakukan uji statistik berdasarkan simpangan baku koreksi ukuran yang merupakan akar positif dari elemen ke-i,i matriks varian kovarian koreksi ukuran (Soeta’at 1996). Datasnooping dilakukan untuk tiap data pengamatan.
: data pengamatan tidak dipengaruhi kesalahan tidak acak ... (I.44) : data pengamatan dipengaruhi kesalahan tidak acak ... (I.45) Penerimaan bila memenuhi syarat persamaan (I.46) berikut :
... (I.46) Dalam hal ini,
= ... (I.47) : koreksi pengamatan ke-i
: simpangan baku koreksi pengamatan ke-i
I.8.10. Perhitungan Vektor Pergeseran Horisontal dan Ketelitiannya
Vektor pergeseran horisontal merupakan selisih nilai koordinat titik-titik pantau antar dua kala pengamatan. Jika Xm dan Xn adalah nilai koordinat titik-titik pantau pada
kala ke-m dan ke-n, maka vektor pergeseran horisontal (d) seperti persamaan (I.48) berikut.
d = Xm– Xn ... (I.48)
= ... (I.49) Dalam hal ini,
, : derajat kebebasan pada kala ke-m dan kala ke-n , : varian aposteori pada kala ke-m dan kala ke-n
Matriks kofaktor pergeseran horisontal ( ) dihitung dari persamaan (I.50):
= (ATPdA)-1 ... (I.50)
Dalam hal ini,
Pd = ((ATPA)-1(m) + (ATPA)-1(n))-1
Matriks varian kovarian pergeseran horisontal (∑dd) diperoleh dari persamaan (I.51) : ∑dd = ∑xxm + ∑xxn = ... (I.51) I.8.11. Uji Statistik Pergeseran
I.8.11.1.Uji kesebangunan jaring. Uji kesebangunan jaring berfungsi untuk memeriksa ada atau tidaknya perubahan bentuk yang terjadi pada suatu jaring yang digunakan untuk pengamatan pergeseran. Pengujian dilakukan terhadap jaring pemantauan pergeseran secara global. Tahap pengujiannya (Widjajanti, N., 2001) :
1). Membentuk model hitungan seperti persamaan (I.52)
Ud Vd + d = 0 ... (I.52)
Dalam hal ini,
Ud : matriks koefisien koreksi pengamatan
d : vektor pergeseran titik pantau Vd : vektor koreksi pergeseran
2). Menghitung nilai korelat pergeseran Kseperti persamaan (I.53) :
K = ( Ud Qd UdT )-1 d ... (I.53)
kombinasi matriks (ATPA)-1(m) dan ((ATPA)-1(n) ... (I.54) 3). Menghitung nilai koreksi pergeseran titik obyek Vd dan d, seperti
Vd = - Qd UdT K ... (I.55)
= Qd-1 Vd (I.56)
4). Menghitung varian nilai pergeseran seperti persamaan (I.57) dan (I.58) : Varian apriori pergeseran : = ... (I.57) Varian aposteori pergeseran : = ... (I.58) 5). Menyusun hipotesis :
Ho: bentuk jaringan tidak mengalami perubahan(
2 0d σˆ = 2 od σ )
Ha: bentuk jaringan mengalami perubahan (
2 od σˆ ≠ 2 od σ ) 6). Menetapkan taraf uji ( ).
7). Menentukan nilai batas dari tabel fungsi Fisher dengan argumen dan f(derajat kebebasan).
8). Menguji hipotesis nol ( ) seperti persamaan (I.59) :
Hipotesis nol ditolak jika : > ... (I.59) Penerimaan H0 mengindikasikan bahwa jaring tidak mengalami perubahan bentuk.
Begitu pula sebaliknya, penolakan menunjukkan adanya perubahan bentuk pada jaring pemantauan. Jika penolakan ini terjadi maka perlu dilakukan uji pergeseran titik pantau untuk mengidentifikasi titik-titik pantau yang telah mengalami perubahan bentuk. I.8.11.2. Uji pergeseran titik pantau. Uji pergeseran titik pantau bertujuan untuk mengetahui titik-titik pantau yang mengalami pergeseran. Tahap ini dilakukan jika hasil uji kesebangunan jaringan ditolak. Pada intinya, dalam mendeteksi pergeseran pada tiap titik pantau, uji ini mirip seperti proses data snooping yaitu dilakukan terhadap masing-masing titik pantau. Tahap pengujiannya adalah sebagai berikut (Widjajanti, N., 2001).
1). Menyusun hipotesis :
Ho : titik ke-i tidak mengalami pergeseran Ha : titik ke-i mengalami pergeseran
3). Menentukan nilai batas dari tabel fungsi Fisher dengan argumen 4). Menghitung nilai Wdi untuk setiap titik pantau dengan persamaan (I.60).
= ... (I.60) Dalam hal ini,
Nd = UdT ( Ud Qd UdT )-1 Ud ... (I.61)
5). Menguji hipotesis nol ( ).
Hipotesis nol diterima jika : ≤ ... (I.62) Bila diterima maka artinya titik ke-i tidak mengalami pergeseran, sebaliknya jika ditolak maka titik ke-i itu mengalami pergeseran.
I.8.12. Perhitungan Arah dan Besar Pergeseran Koordinat
Hitung perataan terpisah pada dua kala menghasilkan vektor pergeseran ke arah sumbu X (dX) dan sumbu Y (dY) yang dijadikan dasar perhitungan arah dan besar pergeseran koordinat tiap interval pengamatan. Selanjutnya, persamaan (I.63) dan (I.64) untuk menentukan arah dan besar pergeseran adalah sebagai berikut.
Arah = ... (I.63) Besar = ... (I.64) 1.8.13. Perhitungan Kecepatan Pergeseran Horisontal
Kecepatan pergeseran horisontal untuk masing-masing titik ditentukan dengan membagi pergeseran yang terjadi dengan selang waktu antara dua kala pengamatan yang berurutan.Secara matematis dapat dituliskan sebagai persamaan (I.65).
= ... (I.65) Dalam hal ini,
: kecepatan pergeseran titik pantau ke-i
, : koordinat titik ke-i pada kala ke-m dan kala ke-n : selisih waktu antar kala pengamatan
Varian kecepatan pergeseran horisontal pada titik yang bersesuaian dihitung melalui hukum perambatan varian kovarian sebagai persamaan (I.66).
= . + .
= . + .
= ... (I.66) Dalam hal ini,
: varian kecepatan pergeseran horisontal titik ke-i
, : varian dari koordinat titik ke-i pada kala ke-m dan kala ke-n
I.9. Hipotesis
Tubuh tailing dam terbuat dari campuran tanah, pasir dan rockfill pada bagian dasarnya sehingga ada kemungkinan getaran yang dapat terjadi. Disamping itu pada bagian atas tubuh tailing dam dijadikan jalur akses alat-alat berat, hal itu memungkinkan getaran yang dapat terjadi pada tubuh tailing dam.