SENATEK | Malang, 17 Januari 2015 437
Roket Kendali Otomatis Ketinggian Rendah Menggunakan
ATmega 328 dengan Sensor BMP085 dan CMPS10 serta Grafik
Antarmuka
Agil Setiawan*, M. Fadhil Abdullah, Anggara Wijaya
Universitas Telkom, Jl. Telekomunikasi Terusan Buah Batu, Bandung, 40257 e-mail: [email protected]
ABSTRAK
Penguasaan teknologi roket Indonesia masih sangat jauh di bawah negara maju, khususnya Eropa. Oleh sebab itu, Indonesia harus mampu mengembangkan teknologi roket secara mandiri karena negara maju cenderung sulit untuk membagi ilmu mereka. Pentingnya pengembangan teknologi roket juga karena beragam manfaat yang dimilikinya, salah satunya untuk meluncurkan satelit komunikasi sipil maupun untuk kepentingan pertahanan Negara. Maka dari itu dibuatlah AUTONOMOUS LOW ALTITUDE ROCKET CONTROL (ALARC) atau roket kendali otomatis ketinggian rendah yang memiliki sumber tenaga berupa Li-Po Baterai dengan sistem kontrol berupa mikrokontroller ATmega 328 dengan software ARDUINO IDE serta dilengkapi dengan sensor BMP085 untuk sensor barometer dan CMPS10 sebagai sensor kompas serta kontrol roketnya. ALARC juga dilengkapi dengan sistem waktu peluncuran serta parasut otomatis terbuka. ALARC juga dilengkapi dengan tampilan antarmuka yang dibuat dengan visual studio sehingga memudahkan pemakai menggunakan ALARC. Semoga dengan adanya ALARC ini maka Indonesia juga dapat bersaing dengan negara- negara maju dalam pembuatan roket.
Kata kunci: Li-Po Baterai, Mikrokontroller Atmega 328,ARDUINO IDE, Sensor BMP085, Sensor CMPS10, Tampilan Antarmuka
ABSTRACT
The mastery of rocket technology in Indonesia is still lags behind developed countries specially in Europe. Therefore Indonesia must improve the technology of rocket independently because developed countries is hard to share their knowledges. Moreover as we know the technology of rocket is so important because it has many advantages like launch a communication satellite for civil or for the interest of national defense. Therefore we made AUTONOMOUS LOW ALTITUDE ROCKET CONTROL or we call it ALARC. ALARC has power sources such as Li-po Battery with system of control using mikrokontroller Atmega 328 and integrated with software ARDUINO IDE. ALARC has BMP085 as a sensor for barometer and CMPS10 as a compass sensor and control of rocket. ALARC has a timing system for launch and automatically open parachute. ALARC has graphical user interface (GUI) made using visual studio for make user easy for using it. Hopefully with ALARC, Indonesia Can compete with developed countries.
Keywords: Li-Po Battery, Microcontroller Atmega 328, ARDUINO IDE, BMP085 Sensor, CMPS10
SENATEK | Malang, 17 Januari 2015 438 Pendahuluan
Pentingnya penerapan teknologi antariksa seperti roket pada negara lain harus dicontoh oleh negara Indonesia. Mengingat begitu banyak manfaat yang dihasilkan dari teknologi roket seperti untuk keperluan peluncuran satelit komunikasi ataupun untuk membuat roket kendali sebagai pertahanan negara. Namun yang menjadi permasalahan adalah negara-negara maju khususnya Eropa sangat enggan dalam membagi ilmu Tentang roket dikarenakan ilmu tentang roket sangat mahal dan terbatas. Oleh karena itu kita harus mengembangkan teknologi roket ini meskipun tanpa bergantung dengan negara lain karena pada dasarnya kita mampu untuk mengembangkan teknologi ini. Selain itu pula dengan adanya pengembangan ilmu tentang roket ini maka Indonesia tidak akan dipandang sebelah mata lagi oleh negara lain. Untuk mewujudkan hal itu maka dibuatlah AUTONOMOUS LOW ALTITUDE ROCKET CONTROL atau disingkat ALARC yang merupakan roket kendali dengan sumber tenaga berupa li-po (lithium polimer) dengan dilengkapi dengan sistem kontrol menggunakan ATmega 328 dengan software arduino IDE serta dilengkapi dengan sensor BMP 085 untuk sensor barometernya dan CMPS 10 untuk sensor kompasnya serta kontrol dari roket. Selain itu juga ALARC dilengkapi dengan Tampilan antar muka atau disebut GUI yang bertujuan untuk mempermudah dalam penggunaan.
Metode Penelitian/Pengabdian Masyarakat
Pada pembuatan sistem kerja dari kontrol roket terinspirasi dari pesawat V-tail. V-tail adalah sebuah pengaturan yang tidak konvensional dari permukaan kontrol ekor yang menggantikan sirip tradisional dan permukaan horisontal dengan dua permukaan yang ditetapkan dalam konfigurasi V ketika dilihat dari depan atau belakang pesawat. Bagian belakang setiap permukaan berengsel, dan ini bagian bergerak, kadang-kadang disebut ruddervators, menggabungkan tugas elevator dan rudder. Selain itu juga bentuk roket terinspirasi dari bentuk peluru kendali (disingkat: rudal), peluru berpandu atau misil adalah senjata roket militer yang bisa dikendalikan atau memiliki sistem pengendali otomatis untuk mencari target atau menyesuaikan arah. Kemudian dalam pembuatan sistem untuk pembacaan sensor atau gerak kontrol servo menggunakan sensor – sensor yang biasanya digunakan pada AWS (Automatic Weather Station) serta pada flight controller quadcopter seperti arduflyer ataupun ardupilot. Penelitian ini terdiri dari 3 tahapan, yaitu : pembuatan kerangka roket, pembuatan sistem dan pembuatan graphical user interface. Pada pembuatan kerangka roket awalnya dibuat desain dengan menggunakan autocad, kemudian dilakukan implementasi dari proses desain. Dalam hal ini dibuat kerangka roket seideal mungkin disesuaikan dengan motor EDF (Electric Ducted Fan). Dalam penelitian ini digunakan tiga Fin sebagai penyeimbang dan pengarah roket yaitu dua fin dinamis ( fin yang dapat dikontrol ) mengikuti UAV jenis flying wing dan satu fin statis. Kemudian pada sistem menggunakan Mikrokontroller berupa Atmega 328 dengan bootloader Arduino serta menggunakan BMP085 sebagai sensor barometer serta Cmps10 sebagai sensor kompas. Kemudian EDF akan terhubung dengan Mikrokontroller dengan tujuan untuk mengatur putaran motor ataupun lama terbang dari roket. Selain itu juga Mikrokontroller terhubung dengan sebuah servo yang digunakan untuk membuka parasut secara otomatis. Dalam hal ini roket di set terbang selama 10 detik dikarenakan melewati 10 detik roket akan condong kearah bawah. Setelah sistem rampung maka untuk mempermudah penggunaan dari roket maka dilakukan proses decoding melalui graphical user interface (GUI) dengan menggunakan visual studio sebagai pengolah datanya. Kemudian untuk telemetry data digunakan modul zigbee.
SENATEK | Malang, 17 Januari 2015 439 Hasil dan Pembahasan
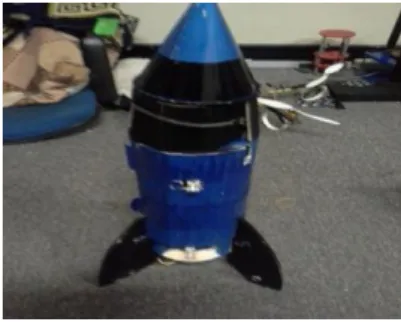
Dalam pembuatan desain roket telah dilakukan uji coba sebanyak lima kali sehingga didapatkan hasil desain roket yang terbaik seperti gambar dibawah ini :
Gambar 1. Desain ALARC (Autonomous Low Altitude Rocket Control)
Adapun ketika dilakukan pengujian lima kali didapatkan data ketinggian terbang roket seperti yang diperlihatkan pada tabel :
Tabel 1 Pengujian Ketingian No Ketinggian 1 30 m 2 70 m 3 50 m 4 80 m 5 130 m
Dalam pengujian yang kelima didapatkan hasil yang terbaik dengan ukuran dan spesifikasi roket seperti yang diperlihatkan pada tabel:
Tabel 2 Ukuran Roket Bagian Ukuran Keterangan
Tinggi
Keseluruhan 50 cm Dari ujung sampai fin bawah
Tinggi Body 22 cm Tinggi Bagian Tengah
Lebar Roket 10 cm Lebar Keseluruhan
Tinggi Fin 17 cm Dari Ujung Fin sampai bawah
Lebar Fin 6.5 cm -
Selain itu untuk membuat ALARC dapat terbang tinggi dibutuhkan baterai sebesar enam cell dengan 2200 mAh, Hal ini dikarenakan EDF (Electric Ducted Fan) yang digunakan yaitu sebesar 4000kv, dengan memberi pulsa yang lebih sempit dan linearitas naik ke ESC maka akan didapatkan percepatan yang konstan sehingga momentum dari motor EDF dapat di ubah menjadi daya dorong yang optimal.
SENATEK | Malang, 17 Januari 2015 440 Bagian dalam ALARC terdiri tiga bagian yaitu : bagian pertama, terletak paling bawah sebagai tempat peletakan baterai dan ESC serta modul zigbee, kemudian bagian kedua yaitu bagian tengah untuk menyimpan mikrokontroller, kemudian bagian ketiga adalah bagian paling atas sebagai tempat untuk menyimpan parasut.
Gambar 3. Mikrokontroler ALARC
Mikrokontroller ALARC dibuat dengan menggunakan PCB kemudian menggunakan ATmega 328 yang sudah diintegrasikan program arduino untuk pengolah kodenya, Selain itu juga digunakan BMP085 sebagai sensor barometer serta Cmps10 sebagai sensor kompas beserta 3-axis yang nantinya dibutuhkan untuk mengontrol kendali roket agar tetap pada lintasan yang telah ditentukan.
Gambar 4. Kodingan sistem ALARC menggunakan Arduino
Dalam proses koding menggunakan arduino 1.0.5 dimana sensor diinisiasi untuk melakukan pembacaan data pitch, roll dan yaw. Kemudian dari pembacaan sensor tadi akan di olah dan di lakukan proses filter jenis kalman sehingga dapat meredam pembacaan informasi ambang yang tidak dibutuhkan. Berdasarkan hasil pengolahan data tersebut di lakukan proses maping atau konversi dari nilai sensor ke nilai kontrol dalam bentuk pulsa digital yang telah diperhitungkan untuk interface kontrol, kemudian hasil dari nilai tersebut akan dikirim ke servo untuk mengatur gerak dari servo. Selain itu juga dilakukan pengkodingan untuk EDF (Electric Ducted Fan) dimana diinisialisasi agar ALARC terbang selama 10 detik kemudian melakukan pembukaan parasut secara otomatis
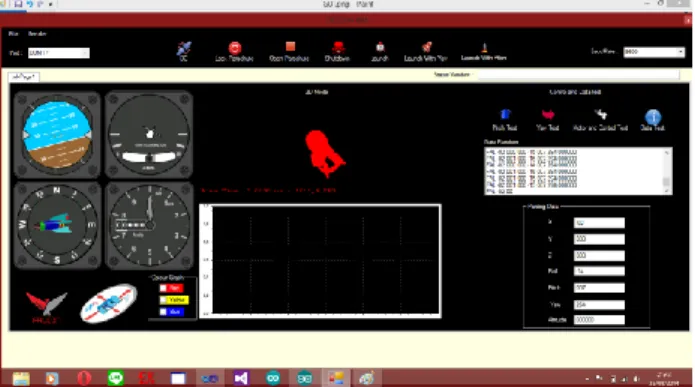
SENATEK | Malang, 17 Januari 2015 441 Dalam pembuatan GUI (Graphical User Interface) menggunakan software Visual Studio 2011 kemudian menggunakan library tambahan berupa sharpGL untuk pembuatan interface yang menarik seperti tampilan pada pesawat. Adapun dalam GUI tersebut terdapat fungsi untuk pengujian data dan gerak dari servo serta peluncuran secara otomatis dan tombol keselamatan untuk mematikan motor secara otomatis kemudian melepaskan parasut secara otomatis. Selain itu juga terdapat tampilan 3D arah ALARC serta grafik waktu dari ALARC.
Kesimpulan
ALARC (Autonomous Low Altitude Rocket Control) merupakan langkah awal untuk mewujudkan Indonesia yang mandiri dalam menciptakan teknologi roket. Hal ini juga bertujuan agar Indonesia tidak dipandang sebelah mata oleh negara lain. ALARC merupakan roket dengan tenaga Elektrik berupa Lipo Baterai yang memiliki sistem kontrol sendiri menggunakan mikrokontroller ATmega 328 dan BMP 085 serta CMPS 10 yang telah terintegrasi dengan GUI (Graphical User Interface). Kedepannya ALARC akan dikembangkan lebih jauh lagi seperti ketinggian yang semakin ditingkatkan serta ketahanan baterai sehingga bisa menjadi layak untuk bersaing dengan negara lain
Daftar Pustaka 1. http://en.wikipedia.org/wiki/V-tail 2. http://www.codeproject.com/?cat=3 3. http://www.byteparadigm.com/applications/introduction-to-i2c-and-spi-protocols/ 4. http://www.robot-electronics.co.uk/htm/cmps10doc.htm 5. http://arduino.cc/en/reference/serial 6. http://www.atmel.com/devices/atmega328.aspx 7. http://extremeelectronics.co.in/avr-tutorials/using-the-usart-of-avr-microcontrollers-reading-and-writing-data/ 8. http://forum.arduino.cc/index.php/topic,58048.0.html