BAB I
BAB I
PENDAHULUAN
PENDAHULUAN
1.1
1.1 Gambaran Laboratorium Kendali dan MIkroprosesorGambaran Laboratorium Kendali dan MIkroprosesor
1.1.1. Sejarah 1.1.1. Sejarah
Laboratorium Kendali dan Mikroprosesor merupakan salah satu laboratorium Laboratorium Kendali dan Mikroprosesor merupakan salah satu laboratorium yang di miliki oleh Jurusan Teknik Elektro Universitas Islam Indonesia yang telah berdiri yang di miliki oleh Jurusan Teknik Elektro Universitas Islam Indonesia yang telah berdiri sejak tahun 2003. Laboratorium ini merupakan pengganti ruang praktikum control atau sejak tahun 2003. Laboratorium ini merupakan pengganti ruang praktikum control atau kendali instrumentasi yang ada pada saat itu berada di BATAN ( Badan Nasional Tenaga kendali instrumentasi yang ada pada saat itu berada di BATAN ( Badan Nasional Tenaga Nuklir ) yang berlokasi di babarsari.
Nuklir ) yang berlokasi di babarsari.
Pada awalnya Laboratorium Kendali dan Mikroprosesor ini berada di lantai 3 Pada awalnya Laboratorium Kendali dan Mikroprosesor ini berada di lantai 3 gedung Fakultas Teknologi Industri yang sekarang berubah fungsi menjadi laboratorium gedung Fakultas Teknologi Industri yang sekarang berubah fungsi menjadi laboratorium untuk jurusan informatika.Kemudian sekitar akhir tahun 2004 laboratorium ini berpindah untuk jurusan informatika.Kemudian sekitar akhir tahun 2004 laboratorium ini berpindah ke lantai 3 sayap timur Gedung Fakultas Teknologi Industri yang lama dan digunakan ke lantai 3 sayap timur Gedung Fakultas Teknologi Industri yang lama dan digunakan sampai sekarang.
sampai sekarang.
Pada tahun 2003 Laboratorium Kendali dan instrumentasi ini di kepalai oleh Pada tahun 2003 Laboratorium Kendali dan instrumentasi ini di kepalai oleh bapak
bapak RM. RM. Sisdarmanto Sisdarmanto Adinandra Adinandra ST, ST, M.Sc M.Sc dengan dengan Laboran Laboran Hery Hery Suryantoro Suryantoro A.Md.A.Md. lalu pada tahun 2006 Labratorium ini berpindah tangan dan selanjutnya kepalai oleh Dwi lalu pada tahun 2006 Labratorium ini berpindah tangan dan selanjutnya kepalai oleh Dwi Ana Ratna Wati ST.,M.Eng dengan laboran yang sama yaitu Hery Suryantro A.Md.
1.1.2 Fasilitas 1.1.2 Fasilitas
Beberapa fasilitas yang di miliki Lab Kendali dan Mikroprosesor, antara lain : Beberapa fasilitas yang di miliki Lab Kendali dan Mikroprosesor, antara lain :
1.
1. Laboratorium ini terdapat mikroprosesor at mel yang dapat di gunakan untuk Laboratorium ini terdapat mikroprosesor at mel yang dapat di gunakan untuk mengendalikan berbagai macam besaran fisis seperti kecepatan motor, mengendalikan berbagai macam besaran fisis seperti kecepatan motor, pengaturan suhu dan lift.
pengaturan suhu dan lift. 2.
2. Beberapa buah lengan robot sebagai sarana untuk lebih memahami systemBeberapa buah lengan robot sebagai sarana untuk lebih memahami system robotika.
robotika. 3.
3. PLC omron (CPM1-30CDR) dan siemen (S2700) du gunakan untuk PLC omron (CPM1-30CDR) dan siemen (S2700) du gunakan untuk mengendalikan traffic light, kendali konveyor, kendali level cairan, dll.
mengendalikan traffic light, kendali konveyor, kendali level cairan, dll. 4.
4. LabVIEW ( Laboratory Virtual Instrument Engineering Workbench) merupakanLabVIEW ( Laboratory Virtual Instrument Engineering Workbench) merupakan bahasa pemrograman grafis yang dapat di gunakan untuk membuat berbagai bahasa pemrograman grafis yang dapat di gunakan untuk membuat berbagai aplikasi.
aplikasi. 5.
5. NI-DAQmx (National Instrument Data Acquisitin), merupakan sebuah hardwareNI-DAQmx (National Instrument Data Acquisitin), merupakan sebuah hardware yang berfungsi sebagai akusisi data baik analog maupun digital.
yang berfungsi sebagai akusisi data baik analog maupun digital.
1.1.3
1.1.3 Jenis Jenis PraktikumPraktikum
Lab. Kendali dan Mikroprosesor merupakan laboratorium yang memiliki Lab. Kendali dan Mikroprosesor merupakan laboratorium yang memiliki beberapa jenis praktikum, diantaranya yaitu :
beberapa jenis praktikum, diantaranya yaitu :
1.
1. Praktikum Kendali.Praktikum Kendali.
Materi yang di bahas yaitu: Materi yang di bahas yaitu:
a.
a. Pengenalan Matlab ( Dasar Teknik Kendali )Pengenalan Matlab ( Dasar Teknik Kendali ) b.
b. Pengenalan PIDPengenalan PID c.
1.1.2 Fasilitas 1.1.2 Fasilitas
Beberapa fasilitas yang di miliki Lab Kendali dan Mikroprosesor, antara lain : Beberapa fasilitas yang di miliki Lab Kendali dan Mikroprosesor, antara lain :
1.
1. Laboratorium ini terdapat mikroprosesor at mel yang dapat di gunakan untuk Laboratorium ini terdapat mikroprosesor at mel yang dapat di gunakan untuk mengendalikan berbagai macam besaran fisis seperti kecepatan motor, mengendalikan berbagai macam besaran fisis seperti kecepatan motor, pengaturan suhu dan lift.
pengaturan suhu dan lift. 2.
2. Beberapa buah lengan robot sebagai sarana untuk lebih memahami systemBeberapa buah lengan robot sebagai sarana untuk lebih memahami system robotika.
robotika. 3.
3. PLC omron (CPM1-30CDR) dan siemen (S2700) du gunakan untuk PLC omron (CPM1-30CDR) dan siemen (S2700) du gunakan untuk mengendalikan traffic light, kendali konveyor, kendali level cairan, dll.
mengendalikan traffic light, kendali konveyor, kendali level cairan, dll. 4.
4. LabVIEW ( Laboratory Virtual Instrument Engineering Workbench) merupakanLabVIEW ( Laboratory Virtual Instrument Engineering Workbench) merupakan bahasa pemrograman grafis yang dapat di gunakan untuk membuat berbagai bahasa pemrograman grafis yang dapat di gunakan untuk membuat berbagai aplikasi.
aplikasi. 5.
5. NI-DAQmx (National Instrument Data Acquisitin), merupakan sebuah hardwareNI-DAQmx (National Instrument Data Acquisitin), merupakan sebuah hardware yang berfungsi sebagai akusisi data baik analog maupun digital.
yang berfungsi sebagai akusisi data baik analog maupun digital.
1.1.3
1.1.3 Jenis Jenis PraktikumPraktikum
Lab. Kendali dan Mikroprosesor merupakan laboratorium yang memiliki Lab. Kendali dan Mikroprosesor merupakan laboratorium yang memiliki beberapa jenis praktikum, diantaranya yaitu :
beberapa jenis praktikum, diantaranya yaitu :
1.
1. Praktikum Kendali.Praktikum Kendali.
Materi yang di bahas yaitu: Materi yang di bahas yaitu:
a.
a. Pengenalan Matlab ( Dasar Teknik Kendali )Pengenalan Matlab ( Dasar Teknik Kendali ) b.
b. Pengenalan PIDPengenalan PID c.
c. PLC untuk pengaturan Trfic Light dan LiftPLC untuk pengaturan Trfic Light dan Lift d.
d. Kendali sudut picu SCR dengan PWM untuk mengendalikan motorKendali sudut picu SCR dengan PWM untuk mengendalikan motor DC
DC e.
f.
f. Sensor suhu dan pengkondisi isyaratnyaSensor suhu dan pengkondisi isyaratnya 2.
2. Praktikum MikroprosesorPraktikum Mikroprosesor Materi yang di bahas yaitu: Materi yang di bahas yaitu: a.
a. Pengenalan MikroprosesorPengenalan Mikroprosesor b.
b. Operasi Transfer DataOperasi Transfer Data c.
c. Instruksi pengolahan dataInstruksi pengolahan data d.
d. Instruksi Kendali ( Control Flow Instruction )Instruksi Kendali ( Control Flow Instruction ) e.
e. Port Input dan OutputPort Input dan Output f.
f. Pewaktu dan pencacah ( Timer dan Counter )Pewaktu dan pencacah ( Timer dan Counter ) g.
1.1.4
1.1.4 Struktur Struktur OraganisasiOraganisasi
Gambar 1.1 Struktur Oraganisasi Laboratorium Kendali dan Mikroprosesor Gambar 1.1 Struktur Oraganisasi Laboratorium Kendali dan Mikroprosesor
JURUSAN TEKNIK ELEKTRO UNIVERSITAS ISLAM INDONESIA JURUSAN TEKNIK ELEKTRO UNIVERSITAS ISLAM INDONESIA
Labratorium Labratorium IMEL IMEL LG CORNER LG CORNER Lab Elektronika Lab Elektronika Digital Digital Lab Kendali &
Lab Kendali & Mikroprosesor Mikroprosesor
Kepala Laboratorium Dwi Ana Ratna Wati Kepala Laboratorium Dwi Ana Ratna Wati
ST.,M.Eng ST.,M.Eng
Laboran Hery Suryantoro A.Md Laboran Hery Suryantoro A.Md
Asisten Laboratorium Praktikum Asisten Laboratorium Praktikum
Kendali Kendali Asisten Laboratorium Praktikum
Asisten Laboratorium Praktikum Mikroprosesor Mikroprosesor Lab DPK Lab DPK Lab DTE Lab DTE LAB TELKOM LAB TELKOM
BAB II
FUZZY SYSTEM
2.1 Fuzzy Logic
Logika fuzzy merupakan bagian turunan kecerdasan buatan, yang berfungsi melakukan pemrosesan terhadap factor ketidak pastian secara baik, dan berhubungan dengan deskripsi karakteristik dari suatu objek yang digunakan, dan kebanyakan deskripsi objek berdasarkan fakta yang ada..
Model logika fuzzy bekerja dngan menggunakan derajat keanggotaan dari sebuah nilai, kemudian di guakan untuk menentukan hasil yang di inginkan, berdasarkan aturan – aturan yang telah di tetukan.
Proses logika fuzzy adala suatu proses yang brdsarkan basis pnetahuan ataua basis aturan, adapun aturan logika fuzzy terdiri dari pernyataan IF-THEN dalam sebuah fungsi keanggotaan.
2.2 Pengertian logika fuzzy
Teori himpunan logika fuzzy di kembangkan oleh Prof Lofti Zadeh pada tahu 1965. Ia berpendapat bahwa logika benar dan salah dari logika bolean tidak dapat mengatasi masalah gradasi yang tida kterhingga tersebut, zadeh mengembangkan sebuah himpunan fuzzy. Tidak seperti logika bolean, logika fuzzy mempunyai nilai yang kontinu. Fuzzy dinyatakan dalam derajat dari suatu keanggotaan dan derajat dari kebenaran. Oleh sebab itu sesuatu dapat di katakana sebagian benar dan sebagian salah pada waktu yang sama.
Contoh berikut akan menjelaskan bagaimana konsep “umur” yang di golongkan “tua” dalam pengertian fuzzy/samar dan crisp (tegas). Misalnya di berikan suatu definisi bahwa setiap orang yang berumur 60 tahun atau lebih adalah “tua”
derajat keanggotaan
0 40 45 50 60 65 70
Gambar 2.1 Konsep “ tua “ dalam pengertian tegas (crisp)
Dalam pengertian crisp (tegas), batas – batas antara “ tua “ dan tidak ” tua “ sangat jelas, setiap orang yang berumur ≥ 60 adalah “tua” , sedangkan yang lainnya (40,41,…,…,55) adalah tidak tua “tua” . tidak ada derajat ketuaan, sedangkan dalam fuzzy setiap anggota memiliki nilai berdasarkan pada derajat anggotaan. Adapun konsep “umur” yang di golongkan “tua” dalam pengertian fuzzy :
derajat keanggotaan
0 40 45 50 60 65 70
Dari gambar 2.3 diatas memperlihatkan, bahwa anggota yang berumur 55 tahun, derajat keanggotaannya 0,7, sedangkan anggota yang berumur 60 tahun derajat keanggotaannya 1. Untuk yang berumur ≥ 60 tahun mewakili secara tepat konsep “tua” yaitu berderajat 1, sedangkan yang < 60 tahun memiliki derajat yang berlainan <1.
Derajat keanggotaan ini, menunjukkan seberapa dekat nilai tiap – tiap umur dalam anggota himpunan itu dengan konsep “tua”. Kita bias mengatakan bahwa anggota yang berumur 55 ahun adalah 70% (0,7) mendekati „tua”, atau dengan bahasa alami “ hampir
atau mendekati tua”.
Istilah logika fuzzy menekankan pada kemampuan manusia untuk mengambil informasi yang dapat di olah. Dalam logika secara umum dikenal dengan adanya true dan false atau secara bilangan dapat dikenal dengan dua anggota 0 dan 1.
Pada himpunan tegas (crisp), nilai keanggotaan suatu system x dalam suatu himpunan a, yang sering di tulis dengan µ ₐ( x), memiliki 2 kemungkinan, yaitu satu (1) yang berarti bahwa suatu system menjadi anggota dalam suatu himpunan, atau nol (0) yang berarti bahwa suatu item tidak menjadi anggota dalam suatu himpunan. Jika dilihat pada himpunan logiika fuzzy, nilai keanggotaannya terletak pada rentang 0 sampai dengan 1. Apabila x memiliki nilai keangotaan fuzzy µ ₐ(x) = 0 berarti x tidak menjadi anggota himpunan a, demikian pula apabila x memiliki nilai keanggotaan fuzzy µ ₐ(x) berarti x menjadi anggota penuh pada himpunan a.
2.3 Sistem Fuzzy
Sebuah sistem fuzzy adalah suatu sistem dari variabel yang berhubungan dengan menggunakan logika fuzzy. Sebuah kontroler fuzzy menggunakan aturan yang ditetapkan untuk mengendalikan sistem fuzzy berdasarkan nilai variable input. Anda dapat
Sistem Fuzzy terdiri dari tiga bagian utama:
variabel linguistik fungsi keanggotaan aturan.
2.3.1 Variabel Linguistik
Variabel linguistik mewakili suatu keadaan dalam kata-kata bukan numeris, variable linguistik adalah variabel input dan variabel output dari sistem Anda ingin mengontrol. Untuk system pemanasan, Anda memiliki dua variabel input linguistik, yaitu “suhu saat ini” dan “suhu yang dikehendaki”, dan satu variabel keluaran linguistik, yaitu “pengaturan pemanasan ”. Setiap variabel linguistik memiliki rentang nilai yang diharapkan. Misalnya, kisaran “suhu saat ini” mungkin 0 sampai 100 derajat. Kisaran “suhu yang diinginkan” mungkin 50 sampai 80 derajat.
Sebuah kontroler fuzzy memerlukan setidaknya satu variabel masukan linguistik dan satu variabel output linguistik.
Variable fuzzy atau istilah linguistik digunakan untuk mewakili nilai-nilai dari variabel linguistik. variabel linguistik “suhu saat ini” dan “suhu yang dikehendaki” masing-masing mungkin mencakup persyaratan linguistik dingin, moderat, dan panas. variabel linguistik pengaturan suhu mungkin termasuk istilah linguistik off, rendah, dan tinggi.
2.3.2 Fungsi keanggotaan
Fungsi keanggotaan adalah fungsi numerik sesuai dengan istilah linguistik. Fungsi keanggotaan mewakili derajat keanggotaan dari variabel linguistik dalam istilah linguistik mereka. Tingkat keanggotaan adalah kontinu antara 0 dan 1, dimana 0 adalah sama dengan 0 anggota dan 1% adalah sama dengan keanggotaan 100%. Sebagai contoh, suhu saat variabel linguistik mungkin memiliki keanggotaan penuh (1) dalam jangka linguistik panas pada 100 derajat, tidak ada keanggotaan (0) dalam istilah pada 70 derajat atau kurang, dan keanggotaan parsial pada semua suhu antara 70 dan 100 derajat.
2.3.3 Aturan
Aturan adalah hubungan antara input dan outpu variabel linguistik output berdasarkan variable fuzzy mereka. Misalnya, Anda mungkin mendefinisikan aturan berikut:
JIKAx adalah A MAKA y adalah B
Dengan A dan B merupakan variable linguistic, x dan y merupakan varibel fuzzy pada aturan tersebut .. pernyataan x adalah A sering disebu konsekuen atau kesimpulan . aturan merupakan strategi control dari sebuah system fuzzy.
2.4.1 Fuzzifikasi
Fuzifikasi digunakan untuk memetakan nilai/harga variable di dunia nyata kedalam variabel fuzzy (fuzzy sets). Pemetaannya dilakukan dengan menggunakan fungsi keanggotaan. Terdapat beberapa metode fuzzifikasi, 3 diantaranya yaitu: Singleton fuzzifier , Gausian fuzzifier dan Triangular fuzzifier . Berikut adalah formulanya. :
2.4.2 Mengimplementasikan strategi control
Setelah kontroler fuzzy memfuzzifikasi nilai input dari sistem fuzzy, kontroler fuzzy menggunakan input variable fuzzy yang ada dan aturan dasar untuk menentukan variable fuzzy yang dihasilkan dari variabel output linguistik.
Misalnya, saat suhu ruangan adalah 50 derajat, yang sesuai dengan variable fuzzy “dingin” dengan tingkat keanggotaan 0,4. Juga misalkan suhu yang diinginkan adalah 70, yang sesuai dengan variable fuzzy moderat dengan tingkat keanggotaan 0,8. kontroler fuzzy menngeksekusi aturan dari sistem fuzzy berikut : JIKA suhu saat ini adalah dingin dan suhu yang diinginkan adalah moderat, KEMUDIAN pengaturan pemanas rendah.
Perhatikan bahwa aturan ini terdiri dari dua nilai awal, "suhu saat ini " “ dingin” dan "suhu yang diinginkan adalah moderat". Nilai kebenaran yg masing-masing adalah sama dengan derajat keanggotaan dari variabel linguistik dalam variabel yang sesuai. Controller logika fuzzy menggunakan hubungan antara kondisi untuk menentukan
bagaimana menghitung nilai agregat dari aturan kebenaran. Misalkan aturan dalam contoh ini menggunakan DAN (Minimum) sebagai penghubung nilai awak, yang menentukan untuk menggunakan derajat keanggotaan terkecil pendahulunya sebagai nilai agregat dari aturran kebenaran dari . Oleh karena itu, nilai kebenaran dari agregat aturan nilai awal adalah 0,4.
Anda dapat menentukan tingkat dukungan untuk masing-masing aturan dari sistem fuzzy. Berat aturan adalah sama dengan tingkat dukungan yang dikalikan dengan nilai kebenaran dari agregat aturan nilai awal. kontroler fuzzy menggunakan metode implikasi untuk skala fungsi keanggotaan dari variabel linguistik output berdasarkan berat aturan sebelum melakukan defuzzification.
2.4.3 Defuzzifikasi
Defusifikasi adalah proses mengembalikan hasil perhitungan fuzzy (variabel fuzzy) menjadi variable sesuai rentangnya di dunia nyata. Sama dengan fuzzifier, defuzzifier juga menggunakan membership function untuk memetakan nilai himpunan fuzzy menjadi variable nyata. Terdapat beberapa metode defuzzifier, 3 diantaranya yaitu:
1. Center of gravity defuzzifier. Center of gravity yang dinyatakan dengan y*, menunjukan pusat area yang diliputi oleh membership function B‟.
2. Center average dufuzzifier. Center average menunjukan weight average dari titik tengah (center) masing-masing membership function.
3. Maximum defuzzifier. Maximum defuzzifier memilih nilai tertinggi sebagai y*. Ada 3 pilihan, smallest of maxima, largest of maxima atau mean of maxima.
akusisi data analisa data menampilkan output
BAB III
LABVIEW
3.1
Pengertian LabView
LabVIEW (Singkatan dari Laboratory Virtual Instrumentation Engineering Workbench) adalah perangkat lunak komputer untuk pemrosesan dan visualisasi data dalam bidang akuisisi data, kendali instrumentasi serta automasi industri yang pertama kali dikembangkan oleh perusahaan National Instruments pada tahun 1986. Perangkat lunak ini dapat dijalankan pada sistem operasi Linux, Unix, Mac OS X dan Windows.
Labview mengunakan konsep instrumentasi virtual ( Virtual Instrumentation ) yaitu suatu cara dimana kita mengunakan graphical programing software untuk menciptakan solusi yang dapat menyelesaikan suatu kebutuhan tertentu. Dengan virtual insrumentasi kita dapat membuat system instrumentasi dan control secara virtual dalam pc, kita dapat mengakusisi data dari sensor atau instrument, menganalisa serta menampilkan hasil dalam instumentasi virtual tersebut sesuai dengan keinginan kita.
VIRTUAL INSTRUMENTATION
labview mengunakan graphical development system yang berbeda dengan bahasa pemrograman lain dimana labview tidak mengunakan teks dalam bahasa pemrogramannya melainkan mengunakan data flow programing, dimana aliran data melewati simpul- simpul pada blok diagram yang pada akhirnya akan menentukan perintah eksekusi dari VI ( Virtual Instrument ) dan fungsi. Dan graphical development system ini pun sangat portable karna kodenya bisa di kompilasi untuk berbagai operating system, bahkan kita dapat memport kode labview kita pada device seperti mikrokontroler maupun mikroprosesor
3.2 Mendesain Fuzzy system pada labview
Pada labview kita dapat mendesain system fuzzy dengan mengunakan Labview PID and Fuzzy Logic toolkit. NationaI LabVIEW PID dan Fuzzy Logic Toolkit adalah sebuah add-on atau program tambahan untuk pengembangan pmrograman grafis LabVIEW yang dapat Anda gunakan untuk menambahkan kontrol algoritma yang canggih untuk program LabVIEW Anda. Dengan menggabungkan toolkit ini dengan akuisisi data NI, FPGA berbasis, dan lainnya I / O hardware, anda dapat membuat aplikasi lengkap kontrol otomatis. Dalam add on ini anda dapat Mengintegrasikan P, PI, PD, dan algoritma kontrol PID ke dalam aplikasi LabVIEW Anda. Anda juga mengunakan Fuzzy Sistem Designer dan Fuzzy Logic VI untuk merancang dan sistem kontrol fuzzy.
3.2.1 Fuzzy Sistem Designer
Fuzy system designer adalah toolkit pada labview untuk mendesain fuzzy system dan menyimpannya kedalam file berformat Fs. Yang selanjutnya dapat diload ke VI pada block diagram.Langkah menampilkan Fuzzy System Designer :
Pilih tools>>control design and simulation>>fuzzy system designer
Gambar 3.4 langkah menampilkan Fuzzy System Designer
halaman variable mengkonfigurasi variable linguistic pada system
o kolom input variable untuk daftar input dan output variable
yang ada pada system
o tombol add variabel untuk menambah variable pada system
serta menambahkan fungsi keanggotaan pada variable system.
o tombol edit untuk mengedit variable o tombol delete untuk menghapus variable
3.2.2 Fuzzy System VI
Langkah menampilkan Function palette Fuzzy logic :
PilihView>>Function Palette>>control design and simulation>>fuzzy logic
Gambar 3.7 langkah menampilkan Function pallete
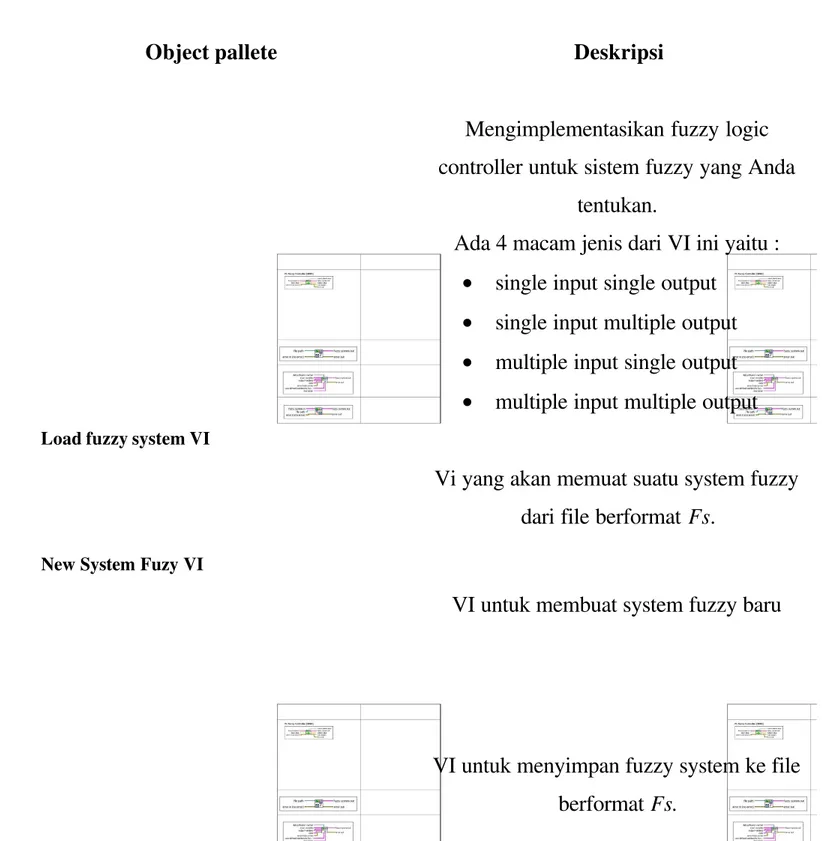
Object pallete Deskripsi
Mengimplementasikan fuzzy logic controller untuk sistem fuzzy yang Anda
tentukan.
Ada 4 macam jenis dari VI ini yaitu :
single input single output single input multiple output multiple input single output multiple input multiple output
Load fuzzy system VI
Vi yang akan memuat suatu system fuzzy dari file berformat Fs.
New System Fuzy VI
VI untuk membuat system fuzzy baru
VI untuk menyimpan fuzzy system ke file berformat Fs.
3.3.1 Design Fuzzy System Untuk Parkir Mobil Otomatis
Sebuah sistem fuzzy terdiri dari tiga bagian utama:
variabel linguistik fungsi keanggotaan aturan.
3.3.1.1 Membuat Variabel Linguistik
Bila Anda membuat sebuah variabel linguistik untuk mewakili variabel input atau output, anda harus menentukan berapa banyak istilah linguistik, atau kategori nilai dari variabel linguistik yang anda ingin buat. Variabel linguistik biasanya memiliki jumlah ganjil istilah linguistik, dengan jangka waktu menengah dan istilah linguistik linguistik simetris pada setiap ekstrim.
Pada kebanyakan aplikasi, cukup digunakan tiga sampai tujuh istilah linguistik untuk mengelompokkan nilai-nilai dari variabel linguistik.
Pada contoh ini Anda ingin mengotomatisasi kendaraan untuk parkir secara otomatis dari posisi yang acak . Seorang pengemudi dapat mengontrol kendaraan dengan terus mengevaluasi posii dari kendaraan tersebut, seperti jarak dari posisi target dan orientasi kendaraan, untuk memperoleh sudut kemudi yang benar.
Gambar 3.9 otomatisasi Parkir Kendaraan
Anda dapat mendefinisikan variabel masukan dua linguistik untuk contoh ini.
Posisi kendaraan x menunjukkan posisi kendaraan dalam kaitannya dengan tujuan.
Orientasi kendaraan β mewakili orientasi kendaraan. Anda juga dapat mendefinisikan variabel keluaran linguistik, sudut kemudi φ, untuk mewakili sudut kemudi kendaraan yang ingin Anda kontrol.
Anda dapat mendefinisikan istilah linguistik Kiri, Kiri Tengah, Tengah, kanan tengah, dan kanan untuk input variabel linguistik Posisi Kendaraan x untuk menggambarkan kemungkinan posisi kendaraan dalam kaitannya dengan tujuan. Anda dapat mendefinisikan istilah linguistik Kiri Bawah, Kiri, Kiri Atas, Atas, Kanan Atas, Kanan, dan Kanan Bawah untuk input variabel linguistik Orientasi Kendaraan β untuk menggambarkan kemungkinan orientasi kendaraan. Istilah Linguistik dari variabel output linguistik Sudut Kemudi φ harus mewakili kedua arah dan besarnya perubahan sudut kemudi. Oleh karena itu, Anda dapat menggunakan istilah linguistik Negatif Besar, Sedang Negatif, Negatif Kecil, Zero, Positif Kecil, Menengah Positif, dan Positif besar untuk variabel output linguistic.
3.3.1.2 Membuat Fungsi keanggotaan
Fungsi keanggotaan adalah fungsi numerik sesuai dengan istilah linguistik. Fungsi keanggotaan mewakili derajat keanggotaan dari variabel linguistik dalam istilah linguistik mereka. Anda dapat menerapkan jenis – jenis fungsi keanggotaan standar diilustrasikan dalam Gambar 3.10 untuk proses yang paling teknis.
Jenis Fungsi-fungsi standard dari fungsi keanggotaan.
Λ (bentuk segitiga), Π (bentuk trapesium),
Tipe tunggal (bentuk garis vertikal) sigmoid (bentuk gelombang)
Gaussians ( bentuk bell )
Gambar 3.10 Jenis Fungsi-fungsi standard dari fungsi keanggotaan
variabel linguistik Posisi Kendaraan x mungkin memiliki keanggotaan penuh (1) didalam jangka istilah linguistik Tengah pada 5 meter, tidak ada keanggotaan (0) didalam syarat 4 meter atau kurang dan 6 meter atau lebih, dan keanggotaan parsial di semua jarak antara 4 dan 6 meter. Jika Anda plot derajat keanggotaan terhadap nilai dari x Kendaraan Posisi, Anda dapat melihat bahwa fungsi keanggotaan dihasilkan adalah fungsi segitiga.
Gambar 3.11 Fungsi keanggotaan segitiga untuk istilah linguistik tengah
kadang variabel linguistik memiliki keanggotaan penuh dalam istilah linguistik pada kisaran nilai bukan pada nilai titik. misalnya, jika variabel linguistik Posisi Kendaraan x memiliki keanggotaan penuh dengan istilah linguistik tengah pada nilai x = 5 ± 0,25 m, fungsi keanggotaan trapesium berlaku, seperti yang ditunjukkan pada Gambar
Gambar 3.13, 3.14, dan 3.15 menunjukkan fungsi keanggotaan untuk semua input dan output variabel output dari manuver kendaraan dengan system fuzzy.
Gambar 3.13 fungsi keanggotaan variabel input posisi kendaraan
Gambar 3.15 Fungsi Keanggotaan Variabel Output Sudut Kemudi
3.3.1.3 Membuat Aturan
Untuk membuat aturan, Anda harus menentukan maksud dari ungkapan atau ekspresi , JIKA , MAKA dan konsekuensi, dari aturan. Sebagai contoh, perhatikan aturan berikut: tengah JIKA Posisi Kendaraan x adalah Kiri tengah DAN Orientasi Kendaraan β kiri atas, MAKA sudut kemudi φ adalah positif kecil. Klausul "Kendaraan x Posisi Kiri Center" dan "Kendaraan β Orientasi adalah Kiri Atas" adalah ungkapan dari peraturan ini. Klausul "Pengarah Sudut φ Kecil positif "adalah konsekuensi dari peraturan ini.Asosiasikan variabel input linguistik dengan istilah linguistik yang sesuai untuk membentuk suatu ungkapan. Asosiasi variabel output linguistik dengan istilah linguistik yang sesuai untuk membentuk sebuah konsekuen. konsekuen dari aturan merupakan
Ketika membangun sebuah basis aturan, hindari aturan bertentangan, atau aturan dengan dengan porsi JIKA yang sama tetapi berbeda porsi MAKA. Sebuah aturan konsisten adalah aturan yang tidak memiliki aturan yang bertentangan.
Total jumlah aturan N yang memungkinkan bagi sistem fuzzy didefinisikan dengan persamaan berikut:
N = p1 × p2 ×
…
× pndimana pn adalah jumlah istilah linguistik untuk variabel linguistik masukan n. Jika setiap variabel input linguistik memiliki jumlah yang sama dengan istilah linguistik, total jumlah aturan N yang memungkinkan didefinisikan dengan persamaan berikut:
N = pm
dimana p adalah jumlah istilah linguistik untuk setiap variabel linguistik input dan m adalah jumlah input variabel linguistik. Sebagai contoh, untuk tiga variabel masukan linguistik dengan lima istilah linguistik masing-masing, jumlah total aturan yang mungkin
N = 53 =125 .
Sebuah aturan dengan setidaknya satu aturan aktif untuk setiap kombinasi yang mungkin dari variabel linguistik input dan istilah linguistik adalah basis aturan yang lengkap. Jika anda mendefinisikan suatu peraturan dasar tidak lengkap, Anda harus menentukan sebuah istilah linguistik standar untuk setiap variabel linguistik sehingga keluaran kontroler fuzzy dapat menangani situasi di mana tidak ada peraturan yang aktif.
Posisi Kendaraan x input variabel linguistik memiliki lima istilah linguistik, dan Orientasi Kendaraan β variabel linguistik memiliki tujuh istilah linguistik. Oleh karena itu, peraturan dasar dari contoh manuver kendaraan terdiri dari
N = 5 × 7 = 35 aturan. Anda dapat mengambarkan aturan dasar yang lengkap dalam bentuk matriks, seperti yang ditunjukkan pada Gambar
Gambar 3.16 Aturan lengkap dalam bentuk matriks
Setiap kolom atau baris merupakan ungkapan atau ekspresi dari sebuah aturan. Istilah di potongan kolom dan baris adalah konsekuensi dari aturan sesuai dengan agregat. Sebagai contoh, aturan berikut ini disorot dalam Gambar
JIKA Kendaraan x Posisi Kiri Pusat DAN β Kendaraan Orientasi adalah Kiri, MAKA Steering Angle φ Negatif Kecil.
Merencanakan peraturan dasar dalam bentuk matriks, seperti pada Gambar , sangat membantu untuk mendeteksi inkonsistensi, seperti aturan bertentangan. Namun,
dengan input kontroler banyak, Anda dapat menggunakan Cascading sistem fuzzy untuk menghindari basis aturan besar. Dalam Cascading sistem fuzzy, output dari sistem fuzzy pertama melayani sebagai masukan untuk sistem fuzzy berikutnya, dan seterusnya.
Menentukan suatu penghubung ungkapan
Jika aturan memiliki lebih dari satu ungkapan atau ekspesi, Anda harus menentukan sebuah penghubung ungkapan untuk menentukan bagaimana menghitung nilai kebenaran dari aturan yg digabungkan. Karena variabel linguistik dapat memiliki derajat keanggotaan dalam sebagian dari istilah linguistik, Anda tidak dapat menggunakan operator Boolean dari logika ganda konvensional sebagai penghubung ungkapan. Toolkit Logika PID dan Fuzzy menggunakan penghubung berikut sebagai gantinya.
Perhatikan bahwa definisi ini setuju dengan operator logika yang digunakan dalam logika Boolean. Sebuah tabel kebenaran menggunakan operator konvensional untuk menghasilkan hasil yang setara.
DAN (Minimum) penghubung yg menentukan untuk menggunakan tingkat terkecil dari keanggotaan anteseden sebagai nilai kebenaran agregat aturan, sedangkan DAN (Product) menentukan untuk menggunakan produk dari derajat keanggotaan dari pendahulunya. OR (Maksimum) penghubung yg menentukan untuk menggunakan tingkat terbesar dari keanggotaan pendahulunya. OR (Probabilistik) penghubung yg menentukan untuk menggunakan jumlah probabilistik dari derajat keanggotaan dari pendahulunya.
Asumsikan aturan berikut ini mengeksekusi untuk satu set tertentu dari nilai input.
(1) JIKA Kendaraan x Posisi Tengah DAN Orientasi Kendaraan β adalah Kiri Atas (derajat keanggotaan = 0,8) (Minimum) (derajat keanggotaan = 1.0) = 0,8
MAKA Sudut kemud φ Negatif Kecil
(2) JIKA Kendaraan x Posisi Pusat Kanan DAN Orientasi Kendaraan β adalah Kiri Atas (derajat keanggotaan = 0,1) (Minimum) (derajat keanggotaan = 1.0) = 0,1
MAKA Sudut kemud φ Negatif menengah
Perhatikan bahwa setiap aturan menggunakan DAN (Minimum) penghubung .
Dalam aturan 1, Posisi Kendaraan x memiliki derajat keanggotaan 0,8 dengan istilah linguistic tengah dan Kendaraan β memiliki tingkat keanggotaan 1,0 dalam istilah linguistik Kiri Atas. Karena penghubung adalah DAN (minimum), pengontrol fuzzy untuk sistem fuzzy ini menggunakan tingkat terkecil dari keanggotaan ungkapannya , atau 0,8, sebagai nilai kebenaran aturan digabungkan. Demikian pula, tingkat terkecil dari keanggotaan ungkapan dalam Peraturan 2 adalah 0,1. Oleh karena itu, kontroler fuzzy menggunakan 0,1 sebagai nilai gabungan aturan kebenaran. Nilai gabungan aturan kebenaran adalah setara dengan tingkat kebenaran aturan.
Jika kedua aturan adalah aturan hanya dipanggil untuk satu set nilai-nilai input, istilah linguistik lainnya untuk Sudut Kemudi φ keluaran variabel linguistik memiliki nilai kebenaran 0. Tabel berikut menjelaskan nilai kebenaran akhir untuk setiap
Negatif besar sampai tingkat 0,0
Negatif Sedang sampai tingkat 0,1
Negatif Kecil sampai tingkat 0,8
Nol sampai tingkat 0,0
Positif Kecil sampai tingkat 0,0
Positif Sedang sampai tingkat 0,0
Positif besar sampai tingkat 0,0
Jika aturan memiliki lebih dari satu konsekuen, controller logika fuzzy harus mengevaluasi gabungan konsekuen aturan. Ketika Anda menerapkan kontroler fuzzy dalam Toolkit Logika Fuzzy PID dan, kontroler fuzzy hanya selalu menganggap konsekuen yang memiliki derajat keanggotaan terbesar
Anda dapat menentukan tingkat dukungan, antara 0 dan 1, untuk setiap aturan dari sistem fuzzy. Tingkat dukungan menunjukkan signifikansi relatif dari setiap aturan dan memungkinkan untuk fine-tuning dari rule base. Dalam kebanyakan kasus, tingkat dukungan adalah 1. Berat aturan terakhir adalah sama dengan tingkat dukungan dikalikan dengan nilai kebenaran dari gabungan ungkapan aturan.
Sebuah kontroler fuzzy menggunakan metode implikasi konsekuen untuk skala fungsi keanggotaan dari setiap variabel linguistik output berdasarkan berat aturan yang sesuai sebelum melakukan defuzzification. Dalam Toolkit Logika Fuzzy PID dan, Anda dapat menggunakan salah Minimum atau Produk metode konsekuen implikasinya. Dalam metode implikasi Minimum, logika fuzzy controller memotong output fungsi keanggotaan pada nilai bobot aturan yang sesuai. Sebagai contoh, jika sebuah variabel linguistik output memiliki fungsi keanggotaan tiga dengan bobot, aturan 0,5 0,8, dan 0,3, masing-masing, skala fungsi keanggotaan mungkin muncul seperti Gambar
Gambar 3.17 Skala fungsi keanggotaan
Dalam metode Produk implikasi, logika kontroler fuzzy menimbang Skala output fungsi keanggotaan pada nilai bobot aturan yang sesuai. Sebagai contoh, jika sebuah variabel linguistik output memiliki tiga fungsi keanggotaan dengan bobot aturan,, 0,5 0,8 dan 0,3, masing-masing, skala fungsi keanggotaan mungkin muncul seperti Gambar dibawah ini
3.4. Defuzzifikasi
Defuzzification adalah proses mengkonversi derajat keanggotaan variabel output linguistik dalam istilah linguistik mereka ke dalam nilai numerik tegas.
(1) JIKA Posisi Kendaraan x tengah DAN Orientasi Kendaraan β adalah Kiri Atas (derajat keanggotaan = 0,8) (Minimum) (derajat keanggotaan = 1.0) = 0,8
KEMUDIAN Sudut Kemudi φ Negatif Kecil
(2) JIKA Posisi Kendaraan x Pusat Kanan DAN Orientasi Kendaraan β adalah Kiri Atas (derajat keanggotaan = 0,1) (Minimum) (derajat keanggotaan = 1.0) = 0,1
KEMUDIAN Pengarah Sudut φ Menengah Negatif
Kedua aturan menetapkan dua non-nilai nol untuk sudut kemudi φ variabel keluaran linguistik:
Negatif Sedang untuk tingkat 0,1 Negatif Kecil ke tingkat 0,8
Sebuah kontroler fuzzy melakukan defuzzification untuk mengevaluasi kedua nilai linguistik dan mengubahnya menjadi nilai output tunggal numerik. Sebuah kontroler fuzzy dapat menggunakan salah satu dari beberapa metode matematika untuk melakukan defuzzification:
1. Center Of Area ( CoA) ,
2. Modified Center Of Area ( CoA ) 3. Center Of Maximum ( CoM) 4. Mean of Maximum
3.4.1 Center of Area ( CoA )
Pada metode defuzzifikasi Center Of Area ( CoA ) yang juga di sebut Center Of Grafiti ( CoG ) method, fuzzy kontroller pertama tama mengkalkulasi area di bawah skala fungsi keanggotaan dalam kisaran variable output. controller Logika fuzzy kemudian menggunakan persamaan berikut untuk menghitung pusat geometris dari daerah ini.
CoA = Center Of Area
X = nilai dari variabel linguistik
Xmin & Xmax = rentang nilai dari variabel linguistik
Metode defuzzifikasi Center Of Area ( CoA ) efektif menghitung kompromi terbaik antara istilah linguistik dari multiple output.
Gambar 3.19 mengilustrasikan METODE Center Of Area defuzzification untuk output variabel Linguistik Sudut Kemudi φ, DENGAN asumsi Minimum METODE implikasi. BAGIAN Yang diarsir PADA Grafik mewakili Daerah di bawah Skala Fungsi Keanggotaan.
Gambar 3.20 merangkum proses pengontrol fuzzy untuk contoh parker kendaraan otomatis , menggunakan metode defuzzifikasi Center Of area (CoA).
Gambar 3.20 Proses Fuzzy Kontroller
3.5.1 Mendesain Fuzzy System dengan Fuzzy System Desiner
Lakukan langkah-langkah berikut untuk membuat suatu variabel input linguistik sesuai dengan Posisi Kendaraan variabel x masukan linguistik contoh manuver kendaraan
2.
Klik tombol Masukan Variabel Tambahkan ke kanan daftar Masukan variabel untuk meluncurkan kotak dialog Edit Variabel.3.
Masukkan posisi kendaraan dalam kotak teks Nama.4.
Masukkan nilai minimum 0 dan nilai maksimum 10. Kisaran ini menetapkan bahwa posisi relatif terhadap kendaraan tujuan berkisar 0,0-10,0 meter.5.
Klik tombol Fungsi Keanggotaan Add untuk membuat fungsi keanggotaan baru untuk variabel linguistik kendaraan-posisi.6.
Masukkan tersisa di kotak teks Nama7.
Pilih Trapesium dari Shape menu pull-down untuk menentukan bahwa fungsi trapesium menentukan derajat keanggotaan untuk variabel linguistik.8.
Pilih warna yang ingin Anda gunakan untuk fungsi keanggotaan di Keanggotaan fungsi grafik dari color picker.9.
Masukkan 0, 0, 1, dan 4 dalam bidang Poin array. Titik-titik menentukan nilai dari variabel linguistik sesuai dengan dasar dan titik atas, dalam urutan dari kiri ke kanan dan basis ke atas, fungsi keanggotaan.10. Ulangi langkah 5 sampai 9 untuk masing-masing fungsi keanggotaan. 11. Klik tombol OK untuk menyimpan perubahan. Perhatikan bahwa
variabel input-posisi kendaraan muncul dalam daftar Masukan variabel dan fungsi keanggotaan yang sesuai muncul di Input variabel grafik fungsi keanggotaan.
Gambar di bawah menampilkan kotak dialog Edit variabel dengan semua fungsi keanggotaan untuk variabel masukan posisi kendaraan
Anda dapat mengulangi prosedur sebelumnya untuk menciptakan sebuah variabel input linguistik sesuai dengan variabel input linguistik Orientasi Kendaraan β
Anda dapat membuat variabel output linguistik sama dengan bagaimana Anda membuat variabel input linguistik dalam Sistem Fuzzy Designer. Lakukan langkah-langkah berikut untuk membuat variabel output linguistik sesuai dengan Pengawas variabel output linguistik Sudut Kemudi φ dari contoh manuver kendaraan.
1. Klik tombol Tambahkan output Variabel di sebelah kanan daftar variabel output untuk meluncurkan kotak dialog Edit Variabel.
2. Masukkansudut kemudi-dalam kotak teks Nama.
3. Masukkan nilai minimum -30 dan nilai maksimum 30. Kisaran ini menetapkan bahwa jumlah yang roda kemudi bisa berubah berkisar 30,0 ke -30,0 Fungsi derajat.
4. Klik tombol tambahkan untuk membuat fungsi keanggotaan baru untuk variabel output Keanggotaan-sudut kemudi
5. Masukkan NegBig dalam kotak teks Nama.
6. Pilih Segitiga dari Shape menu pull-down untuk menentukan bahwa fungsi segitiga menentukan derajat keanggotaan untuk variabel linguistik.
7. Pilih warna yang ingin Anda gunakan untuk fungsi keanggotaan di Keanggotaan fungsi grafik dari color picker.
8. Masukkan -30, -30, dan 15 di bidang Poin array. Titik-titik menentukan nilai dari variabel linguistik sesuai dengan dasar dan poin atas, dalam urutan dari kiri ke kanan dan basis ke atas, dari fungsi keanggotaan
9. Ulangi langkah 4 sampai 8 untuk membuat masing-masing fungsi keanggotaan.
10. Klick ok untuk menyimpan variable.
11. Pilih FILE>>Save As untuk menyimpan file system fuzzy dengan nama
Gambar 3.23 Edit Variabel Dialog Box sudut Kemudi
Setelah Anda menentukan input dan variabel output linguistik untuk sistem fuzzy, Anda dapat menggunakan variabel linguistik untuk menciptakan basis aturan untuk sistem fuzzy.
Ingat bahwa variabel input linguistik posisi kendaraan yang Anda buat di bagian Variabel Linguistik memiliki lima fungsi keanggotaan, dan variabel linguistik orientasi kendaraan memiliki tujuh fungsi keanggotaan. Oleh karena itu, Anda dapat membuat 35 kemungkinan kombinasi aturan untuk menghubungkan istilah linguistik dari variabel masukan linguistik dengan istilah linguistik dari variabel output linguistik sudut kemudi.
Lakukan langkah-langkah berikut untuk membuat dasar aturan yang lengkap untuk contoh manuver kendaraan menggunakan Fuzzy Sistem Designer. Anda harus telah membuat kedua variabel linguistik input dan variabel linguistik output untuk menciptakan basis aturan.
1. Klik tab Rule pada Fuzzy Sistem Designer untuk menampilkan halaman Aturan.
2. Pilih Operate»Pre-Generate Rules untuk menampilkan Pra-Menghasilkan kotak dialog Aturan.
3. Pilih AND (minimum) dari menu pull-down Antecedent connective. Opsi ini menentukan bahwa tingkat terkecil dari keanggotaan anteseden menentukan nilai kebenaran dari aturan yg dikumpulkan untuk setiap aturan.
4. Masukkan Degree of support dari 1. Opsi ini menentukan berat aturan yang ingin Anda berlakukan untuk setiap aturan. Berat aturan akhir untuk setiap aturan sama dengan Degree of support dikalikan dengan nilai kebenaran dari aturan yg dikumpulkan.
5. Pilih Minimum dari consequen impliction menu pull-down. Opsi ini menentukan bahwa kontroler logika fuzzy memotong output fungsi keanggotaan pada nilai bobot aturan yang sesuai sebelum melakukan defuzzification.
6. Klik tombol OK untuk mengisi daftar Aturan dengan semua 35 kombinasi istilah linguistik dari variabel input. Setiap aturan menggunakan
Gambar 3.23 Dialog Box Rules
Perhatikan bahwa akibat dari setiap aturan dalam daftar Aturan adalah
"THEN " sudut kemudi 'IS' NegBig '"
Namun., seperti yang digambarkan pada Gambar 3.16 Aturan Dasar, istilah linguistik dari variabel output sudut kemudi tergantung pada kombinasi istilah linguistik dari input variabel.
Lakukan langkah-langkah berikut untuk memodifikasi aturan pradihasilkan untuk menggunakan consequents yang benar.
1. Pilih Rule 1 dalam daftar Rule.
2. Dalam kolom THEN untuk Rule 1, pilih NegSmall sebagai istilah linguistik. untuk variabel output linguistik sudut kemudi. Perhatikan consequents Rule 1 berubah menjadi “THEN „steering angle‟ IS „Negsmall‟ “.
3. Ulangi langkah 1 dan 2 untuk setiap aturan menggunakan consequents pada Gambar 3.16.
sistem fuzzy sekarang memiliki basis aturan linguistik lengkap yang dapat digunakan untuk menganalisis data input dan menghasilkan output data. Namun, peraturan dasar mengembalikan data output sebagai istilah linguistik. kontroler fuzzy harus mendefuzzifikasi data output yang ditentukan aturan dasar sebelum output dapat diterapkan untuk struktur kontrol sistem fuzzy otomatis. Karena itu Anda harus menentukan metode defuzzification untuk kontroler fuzzy untuk digunakan.
Pada halaman Aturan Designer Sistem Fuzzy, pilih salah satu dari metode defuzzification dari metode Defuzzification menu pull-down. Kemudian pilih File »Save untuk menyimpan sistem fuzzy. Sistem fuzzy lengkap. Pada contoh ini pilih Center of Maximum. Sebelum Anda mengintegrasikan sistem fuzzy ke dalam struktur kontrol yang Anda ingin untuk otomatisasi, Anda mungkin ingin melakukan tes fungsionalitas dari sistem. Anda dapat menguji hubungan antara input dan nilai output dari suatu sistem fuzzy untuk memvalidasi aturan dasar dari sistem fuzzy. Gunakan halaman Test System dari Sistem Fuzzy Designer untuk menguji sistem fuzzy yang dibuat dalam bagian sebelumnya.
Lakukan langkah-langkah berikut untuk menguji sistem manuver kendaraan fuzzy.
1. Klik tab Test System pada Fuzzy Sistem Designer untuk menampilkan halaman Test System.
2. Masukkan nilai Input Value 5 untuk variabel input linguistik posisi kendaraan. Ingat dari bagian dari Menciptakan Variabel Linguistik dari bab ini bahwa nilai 5 untuk variabel masukan kendaraan-posisi linguistik sesuai dengan istilah linguistik tengah.
3. Masukkan nilai Input Value -30 untuk variabel input linguistik orientasi kendaraan. Ingat dari bagian Menciptakan Variabel Linguistik bab ini bahwa nilai -30 untuk variabel linguistik kendaraan-orientasi masukan sesuai dengan istilah linguistik kiri bawah.
Dalam tabel Invoked Rules, perhatikan bahwa sistem fuzzy memanggil Peraturan 15:
IF 'posisi kendaraan' IS 'pusat' dan 'orientasi kendaraan' IS
'kiri bawah' THEN 'sudut kemudi' IS 'NegMed'
Ingat dari bagian Membuat Variabel Linguistik dari bab ini bahwa istilah linguistik NegMed untuk variabel linguistik output sudut kemudi sesuai dengan kisaran antara -30 dan -5. Perhatikan bahwa nilai Output dari variabel outputsudut kemudi -16,7334, yang berada dalam kisaran ini.
kontroler fuzzy menghitung nilai output berdasarkan berat aturan, metode implikasi konsekuen, dan metode defuzzification.
Anda juga dapat menggunakan kontrol geser nilai input 1 dan nilai input 2 untuk menukar rentang nilai untuk variabel-variabel masukan linguistik dari sistem fuzzy. Anda kemudian dapat mengamati perubahan yang sesuai dalam grafik hubungan Input / Output. Anda dapat menggunakan grafik Input / Output hubungan untuk memverifikasi bahwa rule base adalah wajar dan lengkap. Sebagai contoh, jika grafik hubungan Input / Output adalah 0 di beberapa titik, aturan dasar mungkin tidak lengkap.
Setelah Anda membuat sebuah sistem fuzzy dalam Sistem Fuzzy Designer, Anda dapat menggunakan FL Fuzzy Controler VI untuk mengimplementasikan pengontrol untuk sistem fuzzy. Anda dapat memuat fuzzy system yang telah anda buat dan simpan pada hard drive anda
Gambar 3.24 block diagrarm pada system parkir otomatis dengan fuzzy controller
BAB IV
PENUTUP
Kesimpulan
Setelah mahasiswa melakukan kerja praktek di Laboratorium Kendali dan Mikrprosesor Universitas Islam Indonesia maka dapat di simpulkan bahwa kita dapat menggunakan logika fuzzy untuk mempercepat pengembangan dan pengimplementasian pengendalian untuk sistem nonlinier ataupun system yang sangat kompleks. Strategi pengendalian dilaksanakan dengan aturan linguistik intuitif sederhana,.kita juga dapat mendesain pembuatan keputusan cerdas dengan menggunakan perangkat lunak logika fuzzy , seperti pengenalan pola atau diagnosis kesalahan. kita dapat menerapkan pengendali fuzzy kontrol dengan aturan yang mudah dimengerti. Istilah linguistik untuk aturan yang ditetapkan dengan fungsi keanggotaan, dan kemudian satu set aturan yang dihasilkan secara otomatis menggunakan perangkat lunak interaktif logika fuzzy. Output dari setiap aturan secara dipilih manual, dan Anda dapat menetapkan nilai-nilai berat untuk mengontrol tuning.
Pada Labview perancangan fuzzy kontroler dapat dilakukan dengan PID and Fuzzy Logic Toolkit. Toolkit ini mempunyai fuzzy system designer dan fuzy logic VI untuk mendesain system fuzzy yng anda inginkan. Perancangan fuzzy system dengan fuzzy system designer pada toolkit ini relative mudah di gunakan, graphic user interface pada fuzzy system designer telah meyediakan konfigurasi untuk pembuatan system fuzzy di mana kita dapat dengan mudah masukan nilai – nilai dan menentukan aturan untuk system fuzzy tersebut, dan juga telah di sediakan metode – metode dasar defuzifikasi sehingga perancangan fuzzy system dapat dilakukan dengan mudah.toolkit ini juga dapat di integrasikan dengan NI DAQ untuk control system
Saran
Dalam pengintegrasian control system mengunakan NI DAQ di butuhkan ketekunan dan kehati-hatian dikarenakan untuk akusisi data pada device tersebut mempunyai nilai batas dalam pengukuran. Mengetahui dan memahami obyek yang akan di ukur merupakan keharusan bagi penguna.