Jurnal Elektro
PENS
www.jurnalpa.eepis-its.edu
Teknik Telekomunikasi Vol.1, No.1, 2012
Politeknik Elektronika Negeri Surabaya
Eksplorasi Beberapa Skema Lokalisasi Range Free Pada Jaringan Sensor Nirkabel
Citra Ayu Empriantomo, Prima Kristalina, Aries Pratiarso
Program Studi D4 Teknik Telekomunikasi Departemen Teknik Elektro Politeknik Elektronika Negeri Surabaya Kampus PENS, Jalan Raya ITS Sukolilo, Surabaya 60111
Tel: (031) 594 7280; Fax: (031) 594 6114
Email:citra63@student.eepis-its.edu, prima@eepis-its.edu, aries@eepis-its.edu,
Abstrak
Lokalisasi pada jaringan sensor nirkabel merupakan masalah penting dalam jaringan sensor nirkabel, karena informasi lokasi secara luas diperlukan dalam berbagai aplikasi pada jaringan sensor nirkabel (JSN). Oleh karena itu estmasi penentuan lokasi dari suatu sensor secara luas sangat diperlukan dalam berbagai aplikasi yang tergantung pada informasi posisi node sensor. Sehingga, dibutuhkan algoritma lokalisasi yang dapat mengestimasikan posisi node-node statis dengan error posisi serendah mungkin.
Algoritma centroid merupakan algoritma lokalisasi range-free yang biaya penerapannya lebih rendah karena tidak membutuhkan hardware tambahan. Dengan algoritma centroid dapat mengestimasikan unknown node berdasarkan jarak sensor dan tentang posisi node anchor untuk memperkirakan lokasi sensor node.Metode lokalisasi weighted centroid merupakn pengembangan dari metode centroid dimana diberikan pembobotan terhadap jarak dari unknown node ke anchor node. Pada hasil simulasi menunjukkan semakin banyak anchor nodes yang digunakan untuk estimasi posisi dapat mengurangi rata-rata error posisi .Metode lokalisasi centroid dan weighted centroid sangat dipengaruhi oleh perbandingan berapa banyak jumlah Anchor dan Unknown yang di sebar,range komunikasi,luas area serta penyebaran yang digunakan. Semakin banyak jumlah anchor yang di sebar estimasi posisi semakin mendekati benar. Metode lokalisasi weighted centroid lebih efektif digunakan karena mempunyai nilai error estimasi yang lebih kecil dibandingkan lokalisasi centroid. Sehingga komunikasi antar dapat berjalan lancar karena Wireless Sensor Network dapat bertahan di segala lingkungan serta dapat mengatasi kesalahan posisi node sensor . Pada hasil simulasi menunjukkan semakin banyak anchor nodes yang digunakan untuk estimasi posisi dapat mengurangi rata-rata error posisi. Hal tersebut ditunjukkan pada penambahan jumlah anchor nodes terhadap total node yang disebar, sehingga dapat mengurangi rata-rata error posisi hingga 15%.
Dari hasil simulasi menunjukkan rata-rata error hasil estimasi posisi dengan algoritma centroid lebih rendah dibandingkan pada algoritma weighted centroid. Hal tersebut ditunjukkan pada hasil error rata-rata estimasi posisi menggunakan algoritma weighted centroid mengalami penurunan sebesar 47,35% dibandingkan dengan menggunakan algoritma centroid.
Kata Kunci :.JSN,Lokalisasi,range free,,centroid,weighted centroid
1. Pendahuluan
Dalam beberapa tahun terakhir, dengan kemajuan pesat teknologi dalam desain hardware, penyebaran sejumlah sensor nirkabel dengan biaya rendah adalah suatu teknik yang menjanjikan untuk berbagai aplikasi, seperti target pelacakan, deteksi intrusi, pemantauan habitat satwa liar dan real-time monitoring lalu lintas. Informasi lokasi memegang peran penting dalam memahami konteks aplikasi di jaringan sensor nirkabel dan banyak algoritma tentang lokalisasi telah diusulkan untuk memberikan informasi lokasi per-node. Algoritma lokalisasi ini bisa dibagi menjadi
menghitung lokasi. Metode ini menggunakan pengukuran seperti sudut kedatangan (AOA)[1], waktu kedatangan (TOA), perbedaan waktu range free kedatangan (TDOA) dan penerimaan kuat sinyal (RSS) [2]. Sebaliknya, skema lokalisasi range free tidak membuat asumsi tentang ketersediaan atau keabsahan informasi tersebut. Biasanya skema range based memiliki akurasi lokasi yang lebih tinggi daripada skema lokalisasi range free, tetapi dibutuhkan perangkat keras yang banyak. Karena keterbatasan perangkat keras pada Jaringan Sensor Nirkabel, solusi yang terbaik adalah lokalisasi yang sedang diupayakan sebagai alternative, mengingat biaya yang digunakan lebih murah dibandingkan pendekatan range based yang lebih mahal karena menggunakan hardware untuk pengambilan datanya.
Dalam metode centroid, sensor node melokalisasi sendiri dengan menghitung node dari anchor-anchor yang berdekatan dengan unknown node. Meskipun sederhana dan ekonomis, perkiraan lokalisasi metode ini cukup banyak memiliki kekurangan dengan tingkat kesalahan yang besar dalam keakuratan pengukuran.
Untuk meningkatkan kinerja algoritma centroid, suatu algoritma centroid disempurnakan oleh Kim dan Kwon [3]. Metode ini memberikan akurasi yang baik di lokalisasi yaitu algoritma Weighted Centroid dimana weighted centroid memberikan bobot untuk masing-masing anchor yang sesuai dengan jarak anchor tersebut dengan jarak anchor tersebut terhadap unknown. Semakin jauh jarak unknown terhadap anchor semakin kecil bobot yang diberikan [4].
Sedangkan pada proyek akhir ini penelitian ini akan dilakukan penelitian terhadap kedua macam metode tersebut centroid dan weighted centroid dimana dari kedua metode tersebut akan dibdaningkan bdaningkan metode yang mana yang lebih efektif untuk digunakan pada berbagai macam kasus tertentu yang sudah dilakukan. Serta kemudian dilakukan validasi dengan simulasi menggunakan NS2 dimana untuk mendapatkan data jarak seperti keadaan secara riil . Adanya penelitian jarak dapat digunakan untuk pendekatan dengan kondisi riil di lapangan, namun kondisi ini tidak mutlak mengingat kondisi dilapangan dipengaruhi oleh banyak faktor .
Pada jurnal ini akan dibahas mengenai metode lokalisasi yang digunakan yaitu lokalisasi centroid dan lokalisasi weighted centroid serta hasil dan diskusi yang telah dilakukan untuk menyelesaikan proyek akhir ini serta kesimpulan setelah melakukan berbagai percobaan untuk mengetahui error estimasi posisi yang menjadi masalah dalam lokalisasi ini.
2. Metode
Algoritma lokalisasi pada pembuatan sistem ini yaitu metode lokalisasi centroid dan lokalisasi weighted centroid.
Langkah-langkah lokalisasi menggunakan algoritma ini pada pembuatan sistem ini adalah : 1) Masing-masing anchor node memberitahukan posisinya.
2) Untuk mendapatkan jarak masing-masing di lakukan iterasi berulang kali dari anchor node sebanyak jumlah unknown node
3) Masing-masing unknown node menanggapi sinyal yang di sebarkan oleh anchor node yang memenuhi range komunikasinya yang pada perancangan sistem ini di representasikan sebagai fungsi jarak.
2.1 Lokalisasi Centroid
N. Bulusu dan J. Heidemann[7] mengusulkan Algoritma range free yang berbasis pada sensor yang saling berdekatan. Teknik lokalisasi centroid menggunakan pengetahuan tentang posisi node anchor-anchor (Xi,Yi) untuk memperkirakan lokasi sensor node. Dalam metode ini, terdapat tiga langkah inti dari algoritma ini yaitu semua anchor node mengirimkan posisinya ke semua unknown node yang berada dalam rentang transmisinya masing-masing unknown node menunggu periode waktu yang tetap (t) dan mengumpulkan semua sinyal yang diterima dari berbagai macam titik acuan kemudian semua unknown node menghitung posisi mereka sendiri dari semua posisi jangkauan posisi anchor node yang berisi informasi lokasi masing-masing. Simpul sensor menghitung posisinya sebagai pusat dari semua posisi anchor-anchor node yang berdekatan dengan unknown.
(1)
N
Y Y
N X Yest X
Xest N ... N
... , )
,
( 1 1
Gambar 1 Metode centroid sederhana menggunakan tiga referensi node
Dimana (Xest,Yest) merupakan posisi perkiraan Unknown Node,sedangkan (Xn,Yn) adalah posisi dari anchor node dan N adalah jumlah anchor node yang terhubung dan berdekatan dengan Unknown Node[3]. Metode estimasi lokasi menggunakan algoritma centroid sangat sederhana dan ekonomis tetapi hasilnya menunjukan, estimasi kesalahan lokasi yang didapat sangat besar dan tidak dapat digunakan untuk aplikasi yang membutuhka lokalisasi node sensor yang akurat. Tidak ada informasi jarak antar sensor yang di perlukan,karena centroid hanya memerlukan informasi posisi anchor-anchor di dekatnya
2.2.Lokalisasi Weighted Centroid
Perbaikan dari centroid algoritma adalah metode Weighted centroid atau centroid berbobot[5]. Pada metode ini lokasi dari Unknown Node dihitung berdasarkan besar bobot pada anchor nodes yang terkoneksi dengan Unknown Node,berikut ini rumus dari weighted centroid:
(2)
𝑋𝑛, 𝑌𝑛= merupakan koordinat dari anchor node
𝑦 = bobot dari anchor node yang terkoneksi dengan sensor node N = jumlah anchor node referensi yang berdekatan dari unknown
Berikut ini adalah contoh dari weighted centroid dimana menggunakan tiga referensi node
Gambar 2 Metode weighted centroid sederhana menggunakan tiga referensi node
Seperti pada gambar diatas (Xest,Yest) merupakan posisi perkiraan Unknown Node,(Xn,Yn)adalah posisi dari anchor node dan N adalah jumlah anchor node yang berdekatan dengan Unknown Node[3] sedangkan 𝒚 n adalah bobot dari anchor node yang terkoneksi dengan Unknown node.
Skema pemberian bobot pada centroid dapat didekati dengan beberapa pertimbangan:
1.Pembobotan berdasarkan konektifitas(jangkauan komunikasi) unknown yang dicari terhadap
N
i i
n n N
i i
n n
y Y y Y
y y
X y X
Yest y Xest
1 1 1
1 1
1
...
... , )
, (
Keterangan :
Unknown node (Xest,Yest)
Anchor node (R1,R2,R3)
Keterangan :
Unknown node (Xest,Yest)
Anchor node (R1,R2,R3)
3. Kuadran area yang mampu di jangkaua oleh unknown node yang di cari posisinya
Untuk proyek akhir ini skema pembobotan pada centrid di dekati dengan pertimbangan konektifitas unknown dan anchor di sekitarnya.
Rumus Euclidean
langkah berikutnya yang dilakukan adalah menentukan jarak antara anchor node dan unknown node yang telah di sebar. Cara menentukan jarak yang nantinya di hubungkan dengan range komunikasi sensor itu sendiri yaitu menggunakan rumus euclidean seperti dibawah ini
2 2 1 2 2
1 ) ( )
(x x y y
d (3)
Dimana diumpamakan p1 = (x1, y1) adalah koordinat dari letak anchor node yang telah di ketahui lalu p2 = (x2, y2) adalah letak koordinat unknown node yang sebenarnya,setelah ditemukan jarak seluruh unknown node terhadap masing-masing anchor node,yang yang dilakukan berikutnya adalah menentukan range komunikasi yang digunakan pada setiap sensor sehingga hanya node yang memenuhi syarat dari range komunikasi tadi yang akan dipergunakan untuk di terapkan pada perhitungan dari algoritma yang akan di pakai dari sinilah akan di dapatkan posisi estimasi unknown node.
Error Posisi
Untuk pencarian error estimasi posisi dari unknown node digunakan persamaan 4 dimana error posisis merupakan akar dari nilai kuadratik selisih jarak antara posisi unknown hasil estimasi dan posisi unknown sesungguhnya yang ditunjukan dalam persamaan:
𝐸𝑟𝑟
𝑖= (𝑋𝑖− 𝑋𝑖)2+(𝑌𝑖− 𝑌𝑖)2
(4) 𝑋𝑖 𝑌𝑖merupakan koordinat sebenarnya dari unknown node
Sedangkan 𝑋 𝑖𝑌 𝑖 merupakan koordinat hasil estimasi posisi dari unknown node
Dimana semakin besar error yang dihasilkan dalam satu sistem maka akan semakin buruk performansi estimasi posisi dari sistem tersebut. Dalam tugas akhir ini Error posisi dinyatakan dalam satuan meter.
3. Hasil
Simulasi menggunakan Matlab 7.8.0 (R2008b)dan NS-2.34 yang dijalankan pada sistem operasi Windows 7 dengan CPU Prosesor intel (R) core(TM) 2 Duo CPU T5550, RAM 3GB . Pada simulasi dilakukan penyebaran node, perhitungan jarak unknown nodes terhadap anchor nodes, dan perhitungan estimasi posisi. Dari hasil simulasi estimasi posisi dapat dibandingkan dengan posisi sesungguhnya untuk menghitung error posisi. Nilai dari error posisi tersebut menunjukkan akurasi dari sistem lokalisasi yang digunakan. Simulasi menggunakan beberapa skenario untuk mengamati pengaruh beberapa parameter terhadap perolehan error posisi. Berikut ini adalah beberapa skenario simulasi yang telah dilakukan.
3.1. Pengujian terhadap pengaruh range komunikasi dan jumlah anchor node
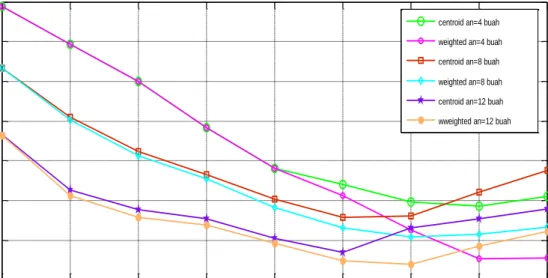
Padapengujian ini diamati pengaruh perubahan range komunikasi dan jumlah anchor node terhadap error rata-rata Seperti yang dapat dilihat pada gambar 3 merupakan grafik rata-rata error posisi terhadap perubahan range komunikasi dan jumlah anchor node dengan metode lokalisasi centroid dan weighted centroid dengan penyebaran grid dimana telah dilakukan pengujian dan didapatkan grafik yang didapatkan dengan membuat penyebaran sensor 100mx100m dengan jumlah anchor node yang di ubah-ubah mulai dari 4 buah,8 buah dan 12 buah dimana jumlah unknown node tetap yaitu 96 buah serta mengubah-ubah nilai dari range komunikasi mulai dari 10m sampai 100m.
Pengaruh range komunikasi terhadap hasil error rata-rata dalam proses lokalisasi centroid dan weigthed centroid sangat besar, pengurangan error rata-rata menurun sebesar 10% setiap penambahan nilai range komunikasi sebesar 10%. Sedangkan untuk penambahan jumlah anchor juga mempengaruhi perubahan nilai error rata-rata, semakin banyak jumlah anchor node yang digunakan sebagai titik referensi untuk mencari unknown node nilai error rata-rata semakin menurun,hal ini dapat dilihat lebih jelas pada gambar 3
10 20 30 40 50 60 70 80 90 100 5
10 15 20 25 30 35 40
Jumlah Unknown node
rata-rata error(m)
centroid R=5m centroid R=10 centroid R=15 centroid R=20 centroid R=25 centroid R=30 centroid R=35 centroid R=40
10 20 30 40 50 60 70 80 90 100
5 10 15 20 25
Jumlah Unknown node
rata-rata error(m)
w eighted R=5m w eighted R=10 w eighted R=15 w eighted R=20 w eighted R=25 w eighted R=30 w eighted R=35 w eighted R=40
20 30 40 50 60 70 80 90 100
0 10 20 30 40 50 60 70
Error Posisi rata-rata lokalisasi Grid
R(range komunikasi)
rata-rata error(m)
centroid an=4 buah weighted an=4 buah centroid an=8 buah weighted an=8 buah centroid an=12 buah wweighted an=12 buah
Gambar 3 grafik rata-rata error posisi terhadap perubahan range komunikasi dan jumlah anchor node dengan metode lokalisasi centroid dan weighted centroid penyebaran grid
Pada gambar 3 error rata-rata mengalami penurunan sebesar 10 % terhadap peningkatan nilai range komunikasi dan jumlah anchor. Error rata-rata pada metode weighted centroid memiliki nilai yang lebih kecil yaitu sebesar 3,4%
dibandingkan error rata-rata pada metode centroid
3.2 Pengujian terhadap pengaruh jumlah unknown node dan range komunikasi terhadap estimasi error Pada pengujian ini diamati perubahan error rata-rata estimasi posisi terhadap perubahan jumlah unknown node dan range komunikasi. Gambar 4(a) dan 4(b) ini di dapatkan dengan membuat penyebaran sensor 50mx50m dengan jumlah anchor node tetap yaitu 10 buah dan jumlah unknown node yang di ubah-ubah mulai 10 buah sampai 100 buah serta mengubah-ubah nilai dari range komunikasi mulai dari 10m sampai 100m. Dilakukan pengujian terhadap dua metode lokalisasi centroid dan weighted dengan kondisi yang sama.
(b) (a)
Gambar 4(a) rata-rata error posisi terhadap perubahan range komunikasi &jumlah unknown node dengan penyebaran rdanom menggunakan metode lokalisasi centroid,
0 10 20 30 40 50 60 70 80 90 100 0
10 20 30 40 50 60 70 80
Error Posisi rata-rata lokalisasi centroid
range komunikasi(m)
error rata-rata(m)
4 Anchor+Noise 4 Anchor tanpa noise 8 Anchor+Noise 8 Anchor tanpa noise
Pada gambar 4(a) merupakan grafik grafik rata-rata error posisi terhadap perubahan range komunikasi dan jumlah unknown node dengan metode lokalisasi centroid penyebaran rdanom telah dilakukan pengujian . Grafik ini di dapatkan dengan membuat penyebaran sensor 50mx50m dengan jumlah anchor node tetap yaitu 10 buah dan jumlah unknown node ya di ubah-uban mulai 10 buah sampai 100 buah serta mengubah-ubah nilai dari range komunikasi mulai dari 10m sampai 100m Grafik ini diperoleh dengan pengambilan sampel error rata-rata sebanyak 10 kali
Pada gambar 4(b)merupakan grafik rata-rata error posisi terhadap perubahan range komunikasi dan jumlah unknown node dengan metode lokalisasi weighted centroid penyebaran rdanom dan telah dilakukan pengujian. Grafik ini di dapatkan dengan membuat penyebaran sensor 50mx50m dengan jumlah anchor node tetap yaitu 10 buah jumlah unknown node ya ng di ubah-uban mulai 10 buah sampai 100 buah serta mengubah-ubah nilai dari range komunikasi mulai dari 10m sampai. Pada pengujian ini penambahan jumlah unknown node tidak berpengaruh besar terhadap error rata-rata estimasi posisi unknown node,penambahan jumlah unknown node menyebabkan kenaikan nilai error rata-rata estimasi posisi pada unknown node sebesar 2,5% sedangkan untuk perubahan nilai dari range komunikasi nilai error rata-rata tertinggi pada saat range komunikasi 5m dan error rata-rata terendah pada saat range komunikasinya 20 m,setelah diuji nilai range komunikasi sebesar 25m maka error rata-rata estimasi posisi meningkat sebesar 3,5% per kenaikan range komunikasi sebesar 5%.
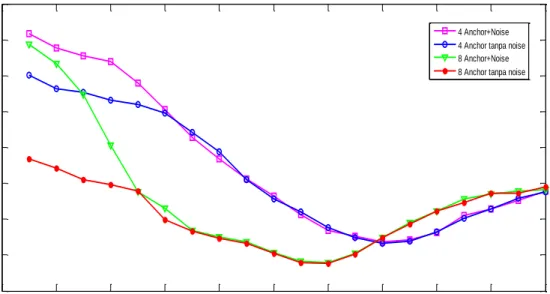
3.2 Pengujian terhadap pengaruh range komunikasi dan jumlah anchor ketika ditambahi noise
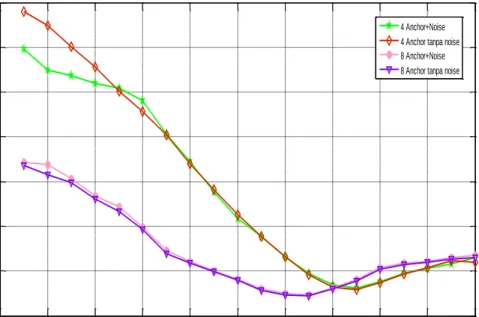
Pada pengujian ini diamati pengaruh perubahan range komunikasi dan jumlah anchor ketika jarak yang didapatkan dari persamaan 3 ditambahi dengan noise. Pada pengujian ini pengaruh dari range komunikasi dan jumlah anchor diamati dengan menggunakan dua metode cntroid dan weighted centroid,dimana simulasi untuk mendapatkan grafik seperti pada gambar 5 dan 6 dilakukan dengan melakukan penyebaran sensor di luasan area 100X100m dengan jumlah anchor 4 dan 8 buah,jumlah unknown tetap 40 buah dan nilai range komunikasi yang di ubah-ubah mulai dari 5m sampai 100m dengan step 5m. untuk gambar 5 menggunakan metode lokalisasi centroid dan pada gambar 6 digunakan metode weighted centroid.
Gambar 5 Error Posisi rata-rata Lokalisasi Centroid Dengan dan tanpa penambahan noise
0 10 20 30 40 50 60 70 80 90 100 0
10 20 30 40 50 60 70
Error Posisi rata-rata lokalisasi Weighted centroid
Range Komunikasi(m)
errorrata-rata(m)
4 Anchor+Noise 4 Anchor tanpa noise 8 Anchor+Noise 8 Anchor tanpa noise
Gambar 6 Error Posisi rata-rata Lokalisasi weighted Centroid Dengan dan tanpa penambahan noise
Gambar 6 dilakukan penyebaran Anchor sebanyak 4 buah dan 40 Unknown serta 8 buah anchor 40 Unknown dan dilakukan pengukuran untuk mencari error posisi menggunakan metode lokalisasi weighted centroid,
Gambar 7 tampilan pada matlab Gui
Gambar 7 merupakan tampilan GUI dari metode lokalisasi ini dimana terdapat inputan yang berupa parameter luas,julah unknown,jumlah anchor dan range komunikasi.
4.Diskusi
Seperti pada gambar 3 hasilnya adalah dari grafik ini dapat dilihat bahwa perubahan nilai range komunikasi terhadap rata-rata error tidak linear baik pada algoritma lokalisasi centroid maupun weighted
penurunan nilai error rata-ratasebesar 10% .
Sedangkan seperti yang terlihat pada gambar 4 (a) dari grafik ini pula dapat dilihat bahwa perubahan nilai range komunikasi terhadap rata-rata error linear. Dapat dilihat pula hasil error rata-rata mengalami penurunan pada saat jumlah unknown node yang disebar mulai dari 10-30 buah tetapi kemudian hasil error rata-rata estimasi posisi mengalami kenaikan sebesar 2,5% walaupun tidak signifikan terhadap bertambahnya jumlah unknown node yang di sebar mulai 40buah sampai 100 buah hal ini berarti jumlah unknown yang ideal untuk disebar dengan luasan 50mx50m dan dengan jumlah anchor 10 buah adalah 30 unknown node karena nilai error rata-rata estimasi posisinya paling kecil hal ini nantinya akan sangat berpengaruh kepada hasil dari lokalisasi menggunakan algoritma centroid
Untuk grafik seperti pada gambar 4(b) bahwa perubahan nilai range komunikasi terhadap rata-rata error linear hanya terjadi kenaikan sebesar 2,5%. Dapat dilihat pula hasil error rata-rata mengalami penurunan pada saat jumlah unknown node yang disebar mulai dari 10 sampai 30 buah tetapi kemudian hasil error rata-rata estimasi posisi mengalami kenaikan hanya sebesar 2 walaupun tidak signifikan terhadap bertambahnya jumlah unknown node yang di sebar mulai 40buah sampai 100 buah hal ini berarti jumlah unknown yang ideal untuk disebar dengan luasan 50mx50m dan dengan jumlah anchor 10 buah adalah 30 unknown node karena nilai error rata-rata estimasi posisinya paling kecil hal ini nantinya akan sangat berpengaruh kepada hasil dari lokalisasi menggunakan algoritma weighted centroid sendiri,dsini juga dapat dilihat bahwa range komunikasi yang digunakan pun mempengaruhi error rata-rata estimasi posisi,range komunikasi yang memiliki error rata-rata paling kecil ketika range komunikasinya 20m jadi dapat disimpulkan untuk luasan area penyebaran sensor secara acak menggunakn algoritma lokalisasi centroid error rata-rata yang dihasilkan akan kecil jika jumlah anchor yang disebar 10 buah,jumlah unknown yang disebar 30 buah dan range komunikasi yang digunakan adalah 20m. Error rata-rata estimasi menggunakan metode lokalisasi weighted centroid berkisar dari nilai terkecil yaitu 4,273m sampai 20,62m
Untuk gambar 5(a) dengan menggunakan metode centroid lokalisasi menggunakn 4 buah anchor dan ditambahkan noise eror rata-rata tertingginya adalah pada saat range komunikasinya 5m yaitu 71,6892m dan error rata-rata terendahnya pada saat range komunikasi yang digunakan adalah 70m yaitu hanya 13,6951m rata-rata terendahnya adalah pada saat range komunikasinya 70m error rata-ratanya adalah 13,2835m. Untuk penyebaran sensor menggunakan metode centroid lokalisasi dengan penyebaran 8 anchor serta 40 unknown dengan kondisi sama seperti sebelumnya hasilnya adalah ketika dilakukan pengujian dengan menambahkan noise pada jaraknya di hasilkan untuk error rata-rata posisinya adalah pada saat range komunikasinya 5m yaitu 68,7865m untuk error rata-ratanya,sedangkan nilai terendah error rata-ratanya adalah pada saat range komunikasinya yaitu 60m yaitu 7,984m untuk error rata-ratanya. Untuk jumlah anchor 4 buah mempengaruhi besar error rata-rata sebesar 2,9% lebih besar dibandingkan dengan yang tidak ditambahi noise.
Sedangkan untuk gambar 5(b) bahwa error rata-rata posisi estimasi untuk jumlah anchor yang lebih banyak yaitu 8 buah menghasilkan error rata-rata yang lebih sedikit dibandingkan jika hanya menggunakan 4 buah Anchor sebagai acuannya tidak menggunakan noise error rata-rata tertingginya adalah pada saat range komunikasinya 5m yaitu 60.191m untuk error rata-ratanya,sedangkan untuk nilai error rata-rata terendahnya adalah pada saat range komunikasinya 70m error rata-ratanya adalah 13,2835m. Untuk jumlah anchor 4 buah mempengaruhi besar error rata-rata sebesar 2,9% lebih besar dibandingkan dengan yang tidak ditambahi noise.
Dalam aplikasi JSN yang sebenarnya dapat menggunakan algoritma centroid dan weighted centroid untuk mengestimasikan jarak unknown nodes terhadap anchor nodes, sehingga selanjutnya dapat dilakukan estimasi posisi. Metode estimasi posisi untuk jumlah anchor nodes yang disebarkan lebih dari 3, sebaiknya menggunakan multilaterasi agar dapat memperoleh error hasil estimasi yang rendah. Penggunaan anchor nodes yang terlalu banyak akan menyebabkan tidak efisien dan mahal dalam aplikasi hardware-nya. rasio anchor nodes yang digunakan setidaknya 10 % dan sebaiknya tidak melebihi 25 %, karena saat rasio anchor nodes lebih dari 25% tidak menunjukkan penurunan error posisi yang terlalu signifikan. Hal tersebut dikarenakan saat rasio anchor nodes mencapai nilai tersebut, ukuran area estimasi tidak terlalu besar penurunannya, sehingga dampaknya menjadi lebih kecil [7] terhadap penurunan error posisi.
Algoritma centroid dan weighted centroid tidak membutuhkan konektivitas yang tinggi antar node, sehingga jumlah unknown nodes tidak terlalu berpengaruh terhadap estimasi node melainkan jumlah anchor node agar komunikasi antar node dapat dilakukan. Selain itu dalam penerapan algoritma centroid dan weighted centroid setidaknya terdapat 3 anchor nodes untuk melakukan perhitungan estimasi posisi sehingga menghasilkan nilai estimasi posisi yang baik. Bila pada sebuah area JSN hanya terdapat 3 anchor nodes kemudian terdapat salah satu hardware atau dua yang tidak dapat bekerja dengan baik. Proses estimasi posisi
menggunakan algoritma centroid dan weighted centroid masih bisa bekerja tetapi kesalahan estimasi posisinya akan sangat besar.
5.Kesimpulan
1. Metode lokalisasi centroid dan weighted centroid sangat dipengaruhi oleh berapa banyak jumlah Anchor dan Unknown yang di sebar,semakin banyak jumlah anchor yang di sebar estimasi posisi semakin mendekati benar.Error rata-rata posisi estimasi unknown node untuk penyebaran grid jika menggunakan algoritma lokalisasi weighted centroid hasilnya lebih baik dibandingkan dengan lokalisasi centroid dikarenakan error rata-ratanya yang lebih kecil sebesar 5%, jumlah anchor mempengaruhi besar error rata-rata posisi estimasi dari unknown node tetapi range komunikasi di sini tidak begitu berpengaruh karena setiap variasi jumlah anchor nilai terkecil dari error rata-rata posisi estimasi berbeda. Range komunikasi sangat berpengaruh terhadap nilai error rata-rata Hasil error rata-rata dari pengukuran jarak di NS2 dan matlab tidak jauh berbeda jika di masukan ke dalam algoritma centroid dan weighted centroid. Pada centroid dari hasil pengukuran jarak di matlab dan NS2 sma yaitu 6.0522 m sedangkan untuk weighted centroid lebih bagus dari hasil pengukuran jarak di NS2 yaitu untuk hasil error rata-rata di NS2 5.3580 m sedangkan dengan menggunakan rumus Euclidean di matlab hasilnya error rata-ratanya 5.3718 m error rata-ratanya lebih kecil sebesar 0,2%
Referensi
[1] http://www.mobilab.unina.it/TinySAN.html availabele of 28 june 2012
[2] Qiqian Huang dan S.Selvakennedy Schholof Information Technologies, Madsen Bldg.F09,”A range Free Localization Algorithm For Wireless Sensor Network”
,
Proc. of 63rd IEEE Vehicular Technology Conference, Melbourne, Australia, 7-10 May 2006.
[3] http://abdulkadirsyam.files.wordpress.com/2011/11/tutorial-ns2.pdf available of 13 may 2012
[4] L. Hu dan D. Evans, “Localization for mobile sensor networks,’’ in Proc. IEEE Mobicom 2004, Sept. 2004, pp.
45–57.
[5] N.Bulusu,J.Heidemann,dan D.Estrin,” GPS-less low cost outdoor localization for very small devices”,IEEE personal communications Megazines,7 (5):28-34,October 2000.
[6] J.C. Chen, K. Yao, dan R.E. Hudson, “Source localization dan beamforming,’’ IEEE Signal Processing Mag., vol.
19, no. 2, pp. 30–39, Mar. 2002.
[7] N. Bulusu, J. Heidemann dan D. Estrin, “GPS-less Low Cost Outdoor Localization for Very Small Devices,”
IEEE Personal Communication Magazine, newblock Vol. 7, No. 5, October 200, pp. 28-34.
[8] N. Patwari dan A.O. Hero III, “Manifold learning algorithms for localization in wireless sensor networks,’’ in Proc. IEEE Int. Conf. Acoustics, Speech, dan Signal Processing 2004, May 2004, vol. 3, pp. 857–860.
[9] A. Howard, M. J. Mataric dan G. S. Sukhatme, “Relaxation on a mesh: A formalism for generalized localization,”
2001 IEEE/RSJ International Conference on Intelligent Robots dan Systems (IROS), October 29 - November 3, Maui, pp. 1055-1060.
[10] Y. B. KO dan N. H. Vaidya, “Location-Aided Routing(LAR) Mobile Ad Hoc Networks,” Proceedings of the fourth annual international conference on Mobile computing dan networking (MobiCom 98), Dallas, Texas, October 1998, pp. 66-75.
[11] S. Meguerdichian, F. Koushanfar, M. Potkonjak, dan M.B. Srivasfava, “Coverage Problems in Wireless Ad-hoc Sensor Neworks,” Proceedings of IEEE lnfocom 2001, Ankorange, Alaska, April 2001.