6 2.1 Pengertian Robot
Menurut Mochamad Toyib (2014) Robot adalah serangkaian perangkat mekanik yang dipadukan dengan perangkat elektronik sebagai pengendali.
Menurut Hendra (2014) Robot merupakan sebuah perangkat mekanik yang dapat bergerak dengan cara dikendalikan dengan manusia.
Menurut Suyadhi (2008),“Robot adalah mesin hasil rakitan manusia yang bisa bekerja tanpa mengenal lelah. Awalnya robot diciptakan untuk menggantikan tenaga manusia.”
Menurut Widodo Budiharto(2010),”Robot berasal dari bahasa Czech,robota,yang berarti bekerja.”
”Menurut Budiharto(2010),” Mobile robot adalah robot yang dapatbergerak, umumnya menggunakan kaki atau roda dalam pergerakannya”
2.2 Komunikasi Nirkabel
Komunikasi Nirkabel adalah teknologi pentrasferan data dari satu node atau titik ke titik yang lain contoh ,antara komputer dengan komputer, Handphone dengan komputer, Handphone dengan jaringan selular, Handphone dengan Handphone . dimana perantara atau media trasmisinya tidak berupa kabel fisik.
Komunikasi nirkabel juga disebut dengan wireless karena memiliki arti yang sama, wireless adalah media transmisi radiasi elektromagnetik yang dipancarkan melalui udara terbuka yang dapat berupa mikro gelombang , sistem satelit (satellite system), sinar infra merah.
Salah satu teknologi Nirkabel yang dibahas ialah :
2.1.1 Bluetooth
Awal diciptakan teknologi Bluetooth ini untuk memudahkan antar muka setiap perangkat komunikasi dan elektronika tanpa menggunakan kabel. Pada prinsipnya Bluetooth bekerja pada signal radio yang lebih tinggi daripada signal radio komunikasi biasa.
Teknologi wireless Bluetooth adalah komunikasi yang menghubungkan antara pengguna antara satu sama lainnya di rumah, kantor, tempat umum, dan dimanapun juga
Bluetooth saat ini sangat banyak digunakan sebagai pengganti Infrared, untuk komunikasi data, adalah komunikasi nirkabel dengan menggunakan media pancaran gelombang radio, tidak seperti Infrared, Bluetooth memiliki cakupan area komunikasi yang lebih luas juga karena menggunakan gelombang radio, Bluetooth tetap mampu digunakan untuk berkomunikasi meski terdapat penghalang diantara transmitter dan receiver.
Gelombang radio Bluetooth bekerja pada rentang frekuensi 2,4 – 2,485 GHz (http://www.bluetooth.com/Pages/Basics.aspx – Spectrum). Teknologi Bluetooth memiliki daya tahan yang baik, rendah daya dan rendah biaya. Untuk dapat berkomunikasi dengan Bluetooth, antara transmitter dengan receiver harus melakukan otentikasi (pairing) terlebih dahulu dikarenakan dari strukturnya yang sama secara menyeluruh, sehingga perangkat apapun yang kondisi Bluetoothnya sedang ON, akan dapat terdeteksi oleh perangkat lain yang dalam kondisi sama, bila kedua perangkat tersebut masuk dalam cakupan area Bluetooth tersebut.
SIMPLEX (Searah)
Adalah mode komunikasi satu arah. Di sini pihak penerima tidak dapat memberikan informasi balikan. Atau sering juga disebut komunikasi broadcast (media penyiaran). Mode ini dapat diaplikasikan saat media transmisi yang digunakan dikuasai penuh oleh pihak pengirim. Keseluruhan bandwidth digunakan oleh pengirim
Sinyal di kirimkan dalam satu arah , Transmitter dan receiver tugasnya tetap, Jarang digunakan untuk sistem Komunikasi Data ,Contoh : Radio , Televisi .
HALF DUPLEX (Dua Arah Bergantian)
Adalah media komunikasi dua arah secara saling bergantian. Jadi saat terjadi komunikasi antara TX dan RX. Saat TX mengirim informasi (berbicara) maka RX akan menerima informasi (mendengarkan). Demikian terjadi proses yang sebaliknya
Sinyal dikirim kedua arah secara bergantian , TX dan RX dapat melakuka transmisi tetapi hanya sekali dalam suatu waktu, Terdapat “Turn around time” (waktu untuk merubah arah). Contoh : Chatting, SMS, HT .
FULL DUPLEX (Dua Arah Langsung)
Dalam komunikasi full-duplex, dua pihak yang saling berkomunikasi akan mengirimkan informasi dan menerima data/informasi dalam waktu yang sama, dan umumnya membutuhkan dua jalur komunikasi.
Sinyal di kirimkan ke dua arah secara bersamaan, Membawa data dalam dua arah pada waktu yang sama, Contoh : Mobile Phone, Telepon.
2.3 Teknologi Digital to Analog Converter
Suara yang biasa kita dengar merupakan gelombang analog. Gelombang ini berasal dari tekanan udara yang ada di sekeliling kita, yang dapat kita dengar dengan bantuan gendang telinga. Sehingga kita dapat mendengarkan suara
Dalam penjelasan converter, Komputer hanya mampu mengenal sinyal dalam bentuk digital. Bentuk digital yang dimaksud adalah tegangan yang diterjemahkan dalam angka “0” dan “1”, yang juga disebut dengan istilah “bit”. Tegangan ini berkisar 5 volt bagi angka “1” dan mendekati 0 volt bagi angka “0”. Dengan kecepatan perhitungan yang dimiliki komputer, komputer mampu melihat angka “0” dan “1” ini menjadi kumpulan bit-bit dan menerjemahkan kumpulan bit-bit tersebut menjadi sebuah informasi yang bernilai.
Adalah perangkat elektronika yang berfungsi untuk mengubah sinyal analog (sinyal kontinyu) menjadi sinyal digital. Perangkat ADC (Analog To Digital Convertion) dapat berbentuk suatu modul atau rangkaian elektronika maupun suatu chip IC. ADC (Analog To Digital Converter) berfungsi untuk menjembatani pemrosesan sinyal analog oleh sistem digital.
Tegangan elektrik diproses menjadi sinyal digital oleh sound card. Ketika suara yang telah direkam sebelumnya dimainkan, sound card akan mengubah data digital menjadi suara yang kita dengar (melalui speaker), dalam hal ini gelombang analog. Proses pengubahan data digital menjadi gelombang suara dinamakan Digital-to-Analog Conversion (DAC).
Parameter-Parameter Penting Pada ADC a) Resolusi konversi
b) Waktu konversi c) Kecepatan Sampling
Proses pengubahan dari data digital menjadi tegangan analog terdiri atas beberapa tahap.
Gambar 2.1 Konversi Sinyal Digital ke Analog
1. Menghitung data digital menjadi amplitudo – amplitudo analog 2. Menyambung amplitude analog ini menjadi sinyal analog
3. Memfilter keluaran dengan Low Pass Filter sehingga bentuk gelombang
Proses pengubahan sinyal analog menjadi digital harus memenuhi sebuah kriteria, yaitu kriteria Nyquist. Kriteria ini mengatakan bahwa untuk mencuplik sebuah sinyal yang memiliki frekuensi X Hertz, maka harus mencupliknya minimal dua kali lebih rapat, atau 2X Hertz. Jika tidak, sinyal tidak akan dapat dikembalikan ke dalam bentuk semula.
Digital Input N bits DAC Sample and Hold Low Pass Filter at R/2 hz Analog Output
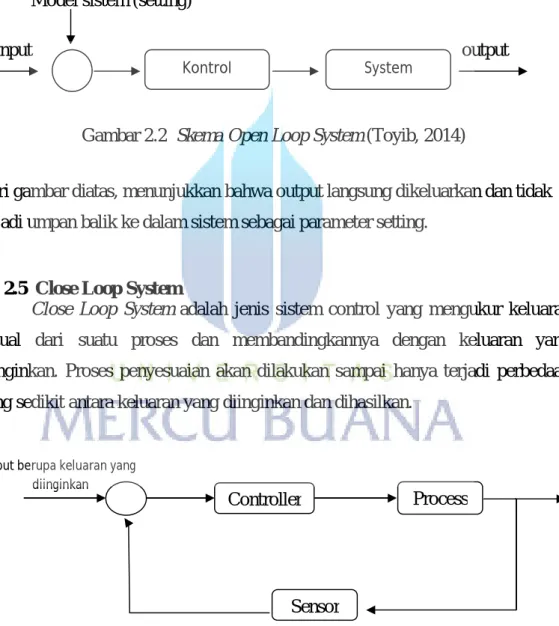
2.4 Open loop system Sistem Terbuka (Open Loop)
Adalah sistem yang memberikan keluaran berdasarkan masukan yang diberikan Dan juga jenis sistem kontrol yang hanya menggunakan sinyal input untuk menjalankan output. Tidak ada umpan balik otomatis untuk menyesuaikan proses yang dijalankan, sehingga penyesuaian harus dilakukan secara manual oleh operator.
Model sistem (setting)
input output
Gambar 2.2 Skema Open Loop System (Toyib, 2014)
Dari gambar diatas, menunjukkan bahwa output langsung dikeluarkan dan tidak terjadi umpan balik ke dalam sistem sebagai parameter setting.
2.5 Close Loop System
Close Loop System adalah jenis sistem control yang mengukur keluaran aktual dari suatu proses dan membandingkannya dengan keluaran yang diinginkan. Proses penyesuaian akan dilakukan sampai hanya terjadi perbedaan yang sedikit antara keluaran yang diinginkan dan dihasilkan.
Skema Close Loop System (Yuyun Estriyanto)
Input berupa keluaran yang diinginkan
Controller Process
Sensor
Berbeda dengan Open Loop, dari gambar diatas, menunjukkan ada sensor yang menerima masukan dari hasil pembacaan output, dimana hasil ini diolah oleh sensor untuk diumpan balikkan ke dalam sistem sebagai parameter seting dengan tujuan agar kontrol mendapatkan masukkan berdasarkan output yang diolah oleh sensor, sehingga sistem bekerja secara otomatis dan akurat.
Secara keseluruhan keuntungan dari sistem Open Loop adalah, Sensitivitas sistem terhadap gangguan.
Stabilitas sistem setelah bekerja sekian lama.
Sistem lebih stabil dan konstan karena pengaturan dilakukan oleh sensor
2.6 Flow Chart
Flow Chart merupakan gambar diagram yang menunjukkan urutan
langkah sebuah algoritma atau sebuah proses yang dipresentasikan berupa gambar kotak dengan berbagai jenis serta antara kotak yang satu dengan yang lain
dihubungkan menggunakan garis panah.
Adapun simbol-simbol flowchart diantaranya,
On-page Reference Off-page Reference
Diagram flowchart digunakan untuk menganalisa, merancang, mendokumentasikan dan mengelola sebuah algoritma sebagai pemecah masalah dalam sebuah proses dengan menguraikan langkah tersebut
2.7 Arduino Uno
Arduino menggunakan pemrograman dengan bahasa C. Berikut ini adalah sedikit penjelasan yang ditujukan kepada anda yang hanya mempunyai sedikit pengalaman pemrograman dan membutuhkan penjelasan singkat mengenai karakter bahasa C dan software Arduino:
Gambar 2.4 Board Arduino Uno R3.
(Sumber : http://arduino.cc/en/Main/arduinoBoardUno)
Arduino Uno R3 adalah seri terakhir dan terbaru dari seri Arduino USB. Spesifikasi Arduino Uno
Mikrokontroler ATmega328 Catu Daya 5V
Teganan Input (rekomendasi) 7-12V Teganan Input (batasan) 6-20V
Pin I/O Digital 14 (of which 6 provide PWM output) Pin Input Analog 6
Arus DC per Pin I/O 40 mA
Arus DC per Pin I/O untuk PIN 3.3V 50 mA
Flash Memory 32 KB (ATmega328) dimana 0.5 KB digunakan oleh bootloader
SRAM 2 KB (ATmega328) EEPROM 1 KB (ATmega328) Clock Speed 16 MHz
2.8 Bluetooth CZ-HC-05
Bluetooth CZ-HC-05 merupakan modul Bluetooth basic-board dengan menggunakan board-modul tambahan berupa extended board dengan tujuan agar mudah dalam pengkabelan serta kompatibel dengan modul Arduino yang ada dipasaran sehingga mudah digunakan. Modul Bluetooth CZ-HC-05 ini berkomunikasi menggunakan port serial dan dapat digunakan baik secara master maupun slave dalam sebuah rangkaian Arduino. Modul Bluetooth ini kompatibel dengan modul Arduino danmenggunakan port UART port komunikasi antar modulnya. Sedangkan untuk melakukan konfigurasi port UART ini, dilakukan dengan melakukan Bluetooth dinyalakan.
Gambar 2.5 Modul Bluetooth CZ-HC-05 (kiri tampak bawah ,kanan tampak atas.) Spesifikasi CZ-HC-05 :
Mikroprosesor : CSR BC417 Indikator : LED State Power Supply : 3,3 VDC
IO : 6
Protokol Komunikasi : UART dan Wireless Serial Frekuensi : 2,4 GHz
Sensitifitas : -80 dBm Kekuatan Pancaran : +4 dBm (RF)
Antena : internal
2.9 2AMotor Shield for Arduino
Modul ini adalah motor DC (Direct Current) (L298P), modul ini mempunyai daya keluaran maksimal 2 beban dan dengan fasilitas pengendalian motor sebanyak maksimum 2 buah motor DC. Masing-masing motor diatur sebanyak 4 tingkat kecepatan.
Gambar 2.6 2A Motor Shield (DFRobot L298P)
Sebagai proteksi motor, modul ini menggunakan delapan buah diode zener yang peka terhadap arus kejut bila terjadi hubungan pendek pada beban (motor). Adapun untuk melakukan konfigurasi modul ini, dapat dilakukan dengan setting jumper pada pin yang ada, diantaranya :
1. PIN Power
Gambar 2.7 Socket Power. Terdapat 2 fungsi PIN jumper pada socket power yaitu :
PWRIN : jumper pin pada posisi ini, sumber catu daya yang digunakan berasal dari eksternal supply, atau dapat menggunakan baterai tambahan.
(posisi jumper ini dapat digunakan apabila Motor yang dikendalikan (beban) mengalami kekurangan daya).
VIN : jumper pin pada posisi ini, sumber catu daya yang digunakan berasal dari Board Arduino yang terhubung.
PIN Jumper power.
2. Mode kendali kecepatan motor
Gambar 2.8 PIN PLL dan PWM
PWM (Pulse Width Modulation)
E1 = pin 4 (Motor 2 kendali arah putaran) M1 = pin 5 (Motor 2 PWM control) E2 = pin 6 (Motor 1 PWM control) M2 = pin 7 (Motor 1 kendali arah putaran)
Spesifikasi teknis 2A Motor Shield for Arduino (DFRobot L298P Shield V1.2) : Microchip Controller : L298P
Logic Control Voltage : 5V DC (From Arduino) Motor Driven Voltage : 6.5-12V (VIN Power Supply)
4.8-35V (External Power Source) Motor Driven current : ≤2A
Pin 4,5,6,7 yang digunakan untuk mengerakkan dua motor DC
Support PWM dan PLL Speed Control, modul yang berfungsi sebagai pengatur dan pengendali Current). Dengan menggunakan Chip dari produsen LG Ampere
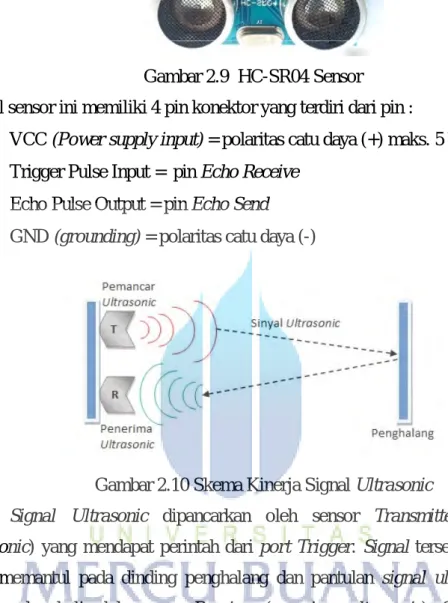
2.10 HC – SR04 Ultrasonic Sensor.
Modul ini merupakan modul sensor jarak terintegrasi antara transmitter dan receivernya, sesuai namanya Ultrasonic, modul ini menggunakan pancaran suara Ultrasonic yang dipancarkan dari transmitter, kemudian pancaran suara tersebut akan membentur objek dan memantul kembali kearah asalnya dan akan diterima serta direspon oleh receiver.
Gambar 2.9 HC-SR04 Sensor
Modul sensor ini memiliki 4 pin konektor yang terdiri dari pin :
VCC (Power supply input) = polaritas catu daya (+) maks. 5 V DC Trigger Pulse Input = pin Echo Receive
Echo Pulse Output = pin Echo Send GND (grounding) = polaritas catu daya (-)
Gambar 2.10 Skema Kinerja Signal Ultrasonic
Signal Ultrasonic dipancarkan oleh sensor Transmitter (pemancar ultrasonic) yang mendapat perintah dari port Trigger. Signal tersebut kemudian akan memantul pada dinding penghalang dan pantulan signal ultrasonic akan diterima kembali oleh sensor Receiver (penerima ultrasonic). Setelah signal tersebut sampat di sensor Receiver, selanjutnya signal akan diteruskan kepada port Echo untuk diproses menghitung jaraknya.
Spesifikasi HC-SR04 : Supply Tegangan : 5 V DC Arus Quiescent : < 2 mA Jangakauan Deteksi : 2 CM – 500 CM Frekuensi Ultrasonic : 40 kHz Resolusi : 1 CM
Trigger Input Signal : 10µS TTL pulse
Echo Output Signal : berdasarkan signal input TTL level dan jarak Sudut Efektif : < 15o
2.11 Micro SD Card Adapter
Micro SD Card Adapter adalah modul untuk arduino yang berguna untuk baca-tulis SD Card. Modul ini kompatibel dengan Micro SD yang biasa digunakan dalam mobile phone sehingga dapat menyimpan data logger, audio, video, grafik. Micro SD Card Adapter ini akan sangat membantu memperluas ruang kapabilitas dari Arduino yang memiliki ruang memori terbatas. Modul ini memiliki interface SPI dan 5V untuk power supply yang kompatibel dengan Arduino UNO atau Mega.
Gambar 2.11 Micro SD Card Adapter
Spesifikasi Micro SD Card Adapter :
Voltage : 4.5 V – 5.5 V
Current : 0.2 – 200 mA
Supported Card Type : Micro SD upto 2 GB, Micro SDHC upto 32 GB Interface Electrical Level : 3.3V / 5V
Leads : GND, VCC, MISO, MOSI, SCK, CS
SPI Standard Interface.
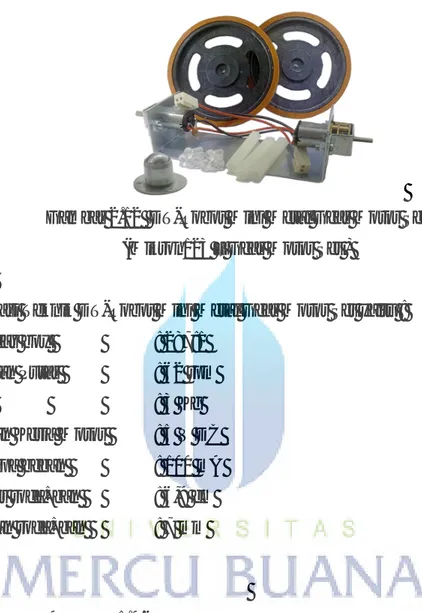
2.12 DT-Robot Mini Metal Gear Motor Set
DT-Robot Mini Metal Gear Motor Set adalah seperangkat roda penggerak untuk aplikasi kit robot beroda. Motor ini terdiri dari 2 buah roda, 2 buah gear
motor DC dan 1 buah roda bebas kemudian pada masing-masing motor DC dilengkapi dengan metal gear.
Gambar 2.12 DT-Robot Mini Metal Gear Motor Set (Mikron123 – Gear Motor Set )
Spesifikasi Teknik DT-Robot Mini Metal Gear Motor Set yaitu :
Rasio gear box : 287:1
Kecepatan Putar : 62 rpm
Torsi : 3 Kg
Tegangan Kerja Motor : 5 V DC
Arus tanpa beban : 100 mA
Diameter roda+ban : 6,9 cm Ketebalan roda+ban : 7 mm
2.13 Arduino 1.0.6
Arduino v.1.0.6 merupakan aplikasi open source dari Arduino yang dibuat untuk memudahkan proses pemrograman board Arduino. Tool ini dapat beroperasi pada sistem Operasi Windows, MacOS maupun Linux. Dalam penulisan kode program Arduino, menggunakan dasar pemrograman Bahasa C kemudian untuk menyimpannya ke dalam memory modul Arduino, menggunakan fitur upload yang ada pada tool ini. Untuk versi rilis Arduino 1.0.6 ini kompatibel dengan modul Arduino tipe : Arduino UNO, Mega2560, Duemilanove, Mega dan Diecimila.
Keterangan Interface Arduino : 1. Main Toolbar
= Verify, berfungsi untuk memferifikasi antar kode program yang telah dibuat dengan yang ada pada memory Arduino.
= Upload, berfungsi untuk menyimpan kode program yang telah dibuat kedalam memory Arduino
= New, berfungsi untuk membuat halaman baru pada aplikasi program.
= Open, berfungsi untuk membuka file projek Arduino yang telah disimpan dalam media penyimpanan komputer. File projek Arduino berekstensi “.ino”.
= Save, berfungsi untuk menyimpan kode program yang telah dibuat kedalam media penyimpanan internal maupun eksternal, agar dapat dikembangkan lebih lanjut.
2. Header adalah Nama File Projek.
3. Halaman Utama Arduino dimana tempat kode program ditulis.
4. Serial Monitor, berfungsi untuk memeriksa status port serial yang digunakan untuk berhubungan dengan Modul Arduino.
5. Tab Navigator adalah tombol navigasi multi-tab pada halaman utama, apabila diperlukan tab baru dalam proses penulisan kode.
6. Status Port, berfungsi menginformasikan status Port Arduino yang terhubung dengan komputer