4
Pada penelitian ini jenis kestabilan yang diteliti adalah small signal stability, yaitu kestabilan sistem tenaga saat mengalami gangguan-gangguan yang kecil. Berbeda dengan gangguan transien yang jarang terjadi, gangguan kecil pada sistem tenaga sering muncul sebagai dampak dari dinamika sistem tenaga itu sendiri. Gangguan kecil pada sistem tenaga contohnya adalah perubahan beban pada pembangkit yang mengakibatkan osilasi pada kecepatan putar generator sehingga mengganggu keserempakan dari sistem tenaga.
2.1.1 Sudut Rotor (δ)
Pada sistem dengan interkoneksi, rotor dari semua generator sinkron harus berputar pada kecepatan yang sama (serempak). Selama operasi keadaan mantap, daya listrik yang keluar dari generator harus seimbang dengan daya mekanis yang masuk ke generator.
Daya input mekanis ke generator adalah hasil perkalian antara torsi dan kecepatan rotor, PM = TMω. Hal ini diilustrasikan pada Gambar 2.1, torsi elektrik akan muncul untuk melawan torsi mekanis karena ada beban yang disuplai oleh generator, untuk mempertahankan operasi dalam kondisi tunak, setiap saat nilai torsi mekanik Tm harus seimbang dengan torsi elektrik Te [4].
Gambar 2.1 Interaksi torsi mekanik dan elektrik pada generator [4]
5
dengan cepat, tetapi daya mekanik yang masuk ke generator berubah dengan lambat. Karena adanya perbedaan respon kecepatan, muncul perbedaan temporer pada keseimbangan daya (mekanik dan elektrik) pada rotor, menyebabkan rotor mengalami percepatan atau perlambatan, tergantung pada perbedaan nilai Tm dan Te. Karena kecepatan rotor berubah, maka sudut relatif rotor juga berubah. Gambar 2.2 menunjukkan hubungan antara sudut rotor, δ, GGM stator, F1, dan GGM rotor, F2. Sudut rotor, δ, adalah sudut antara GGM rotor, F2, dan resultan vektor F1 dan F2,
yaitu R.
Gambar 2.2 GGM rotor, stator, resultan GGM dan sudut torsi [4] 2.1.2 Osilasi pada SMIB
Untuk menganalisis fenomena osilasi kecil pada generator sinkron, suatu pembangkit dapat dimodelkan menjadi bentuk Single Machine Infinite Bus (SMIB) yang merupakan sebuah pembangkit tunggal yang menyuplai daya ke suatu jaringan listrik yang sangat besar sehingga diwakilkan oleh bus tak hingga. Pemodelan generator menjadi SMIB diperkenalkan oleh Heffron dan Phillips pada 1952 dan telah terbukti memberikan hasil yang baik dalam analisis small signal stability [5].
Dalam pemodelan SMIB yang digunakan untuk analisis small signal stability dilakukan asumsi-asumsi sebagai berikut [5]:
6 b) Redaman dari stator diabaikan c) Tahanan stator dianggap nol
d) Generator dianggap sebagai sumber tegangan konstan
e) Sudut rotor sama dengan sudut fasa tegangan output generator
Gambar 2.3 Pembangkit tunggal terhubung ke bus tak hingga [5]
Gambar 2.3 menunjukkan generator yang terhubung ke bus tak hingga, Vt adalah tegangan terminal generator yang diasumsikan konstan saat sebelum gangguan dan Vinf adalah tegangan pada bus tak hingga. Vt lead terhadap tegangan bus tak hingga sejauh δ° yang terus berubah selama rotor berosilasi pada saat
gangguan [1, 5].
Arus yang mengalir pada sistem tenaga adalah [1] :
(2.1)
Daya kompleks generator diberikan dengan [1] :
(2.2)
Tahanan stator diabaikan agar torsi elektrik Te sama besarnya dengan daya listrik P, sehingga [1] :
(2.3)
7
(2.4)
Menggunakan swing equation [1] :
(2.5)
(2.6)
dimana adalah deviasi kecepatan sudut rotor dalam satuan per unit, δ adalah
sudut rotor dalam radian, adalah base kecepatan sudut rotor dalam radian per
detik dan p adalah operator diferensial d/dt dengan t dalam detik.
Linearisasi Persamaan (2.5) menghasilkan dan substitusi Te dari Persamaan (2.4) menghasilkan [1]:
(2.7)
dimana Ks adalah koefisien torsi sinkronisasi sebagai berikut [1]:
(2.8)
linearisasi Persamaan (2.7) menghasilkan [1]:
(2.9)
persamaan (2.7) dan (2.9) jika dituliskan dalam bentuk matriks menjadi [1]:
(2.10)
Persamaan (2.10) menunjukkan bahwa deviasi kecepatan sudut rotor
bergantung pada parameter sistem yaitu D, H, R, jXL dan kondisi operasi awal yang diwakilkan dengan Vt dan . Matriks pada Persamaan (2.10) dapat dibentuk
8
Gambar 2.4 Diagram blok SMIB sederhana [5] Diagram blok pada Gambar 2.4 memberikan [1]:
(2.11)
Persamaan (2.11) disusun kembali menjadi [1]:
(2.12)
persamaan karakteristik dari Persamaan (2.14) adalah [5]:
(2.13)
Persamaan (2.13) sudah dalam bentuk umum seperti Persamaan (2.14) berikut [5]:
(2.14)
dengan akar-akar dari Persamaan (2.16) adalah [5]:
(2.15)
akar-akar pada Persamaan (2.15) adalah frekuensi natural dari rotor yaitu [5]:
(2.16)
dan rasio redaman adalah [1]:
9 maka frekuensi osilasi adalah [1]:
(2.18)
Persamaan (2.14) sampai (2.18) menunjukkan bahwa osilasi pada rotor generator sinkron akan muncul jika ζ < 1, sedangkan osilasi pada SMIB tidak akan
muncul jika mengikuti Persamaan (2.19) [1] :
(2.19)
Persamaan (2.19) menunjukkan bahwa osilasi pada SMIB bergantung pada nilai D, Ks, H dan ω0. Karena D, H dan ω0 nilainya tetap maka osilasi bergantung pada nilai Ks. Ks adalah torsi sinkronisasi berupa torsi elektrik yang rumusnya diberikan pada Persamaan (2.20) [1].
(2.20)
dimana:
K1 : Konstanta sinkronisasi torsi mekanik dan torsi elektronik
K2 : Konstanta efek perubahan tegangan internal generator terhadap Tm : Perubahan sudut rotor
: Perubahan fluks rangkaian medan
Penjelasan mengenai Konstanta K1 dan K2 pada Persamaan (2.20) akan diberikan pada subbab selanjutnya yaitu pembuatan model lengkap SMIB.
10
Gambar 2.5 Osilasi antar-unit (inter-unit oscillations) [4]
Inter-unit oscillations – Jenis osilasi ini secara umum melibatkan dua atau lebih generator sinkron pada sebuah pembangkit tenaga listrik. Generator pada Gambar 2.5 saling berayun satu sama lain, dengan frekuensi berkisar antara 1.5 sampai 3.0 Hertz.
Gambar 2.6 Osilasi mode lokal (local-mode oscillations) [4]
Local mode oscillations – Osilasi ini terjadi antara satu atau lebih generator sinkron pada pembangkit relatif terhadap sistem tenaga atau pusat beban seperti yang tampak pada Gambar 2.6. Rentang frekuensinya dari 0.7 - 2 Hertz. Jenis osilasi ini akan semakin menjadi masalah saat pembangkit dalam kondisi beban dan sistem transmisi dengan reaktansi yang tinggi.
Gambar 2.7 Osilasi antar-area (inter-area oscillations) [4]
11
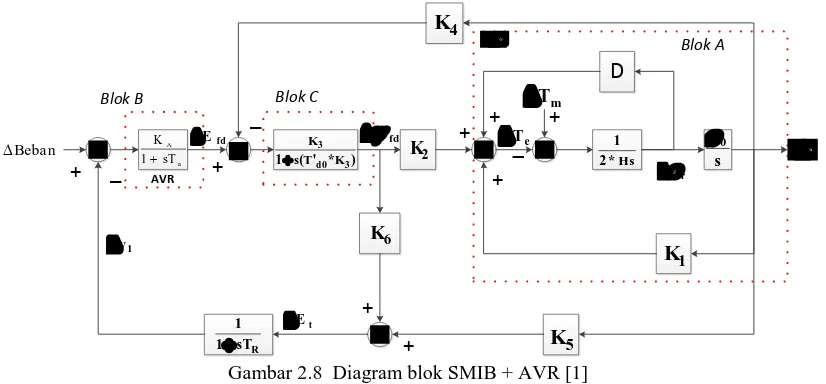
Gambar 2.4 menunjukkan diagram blok SMIB yang paling sederhana, dalam penelitian ini ditambahkan pengendali eksitasi berupa AVR (Automatic Voltage Regulator) sehingga diagram blok SMIB menjadi seperti Gambar 2.5 berikut ini:
a generator, fungsi transfer pada bagian ini adalah rumus dari Persamaan (2.7) [2]. K1 merupakan variabel sinkronisasi, yang berfungsi sebagai penyeimbang torsi mekanik ataupun elektrik. Fungsi transfer dalam blok B menyatakan proses yang terjadi di AVR. Perubahan beban menyebabkan penurunan tegangan baik tegangan output generator maupun tegangan internal generator (diwakili oleh K5 dan K6).
12
K1-K6 adalah variabel transfer yang besarnya tergantung pada konfigurasi jaringan dan pembebanan generator [2]. Nilai K1-K6 dapat dihitung menggunakan persamaan-persamaan berikut ini [6]:
(2.21)
(2.22)
(2.23)
(2.24)
(2.25)
(2.26)
dimana :
(2.27)
Vinf : tegangan bus tak hingga
13
Re : jumlah resistansi antara generator dan bus tak hingga Xe : jumlah reaktansi antara generator dan bus tak hingga α : sudut antara tegangan dan arus generator
Xd : reaktansi stator sumbu d
X’d : reaktansi transien stator sumbu d
Model sistem tenaga pada Gambar 2.7 digunakan untuk mencari keterlambatan fasa yang harus dikompensasi oleh PSS dengan cara sebagai berikut [2]:
(2.28)
(2.29)
(2.30)
Persamaan (2.28) digunakan untuk menghitung frekuensi natural sistem, sedangkan Persamaan (2.29) digunakan untuk menghitung frekuensi osilasi pada sistem tenaga yang teredam akibat adanya rasio yang dihitung menggunakan
Persamaan (2.30). Keterlambatan fasa yang dihasilkan oleh SMIB selanjutnya dapat dihitung menggunakan persamaan berikut ini [2]:
(2.31) θSMIB yang dihitung menggunakan Persamaan (2.31) adalah keterlambatan fasa
saat terjadi osilasi, keterlambatan fasa ini dikompensasi oleh PSS agar osilasi yang timbul dapat diredam dengan baik.
14
Power System Stabilizer (PSS) adalah perangkat kendali pada sistem eksitasi yang berfungsi untuk memberikan redaman terhadap osilasi elektromekanis yang timbul pada generator. PSS meredam osilasi dengan membangkitkan komponen torsi elektronik yang sefasa dengan deviasi kecepatan rotor, sehingga dapat mengembalikan rotor ke putaran sinkronnya. Dalam menghasilkan torsi redaman, PSS bekerja dengan mengolah satu atau lebih dari sinyal input berupa daya output generator, kecepatan rotor dan sudut daya [1].
Gambar 2.9 Skematik generator PLTU dengan AVR dan PSS [7]
Gambar 2.9 menunjukkan bahwa PSS berfungsi sebagai pemberi sinyal tambahan kepada AVR dalam mengontrol eksitasi generator, dengan sinyal input berupa kecepatan sudut rotor ω yang diukur langsung dari putaran mekanik turbin dan daya elektrik P [7]. Bagian-bagian penyusun PSS dan cara kerjanya akan dijelaskan pada bagian berikutnya.
2.3.1 PSS PLTU Pangkalan Susu
15
Pengaturan eksitasi generator dengan GEC-300 dilakukan melalui antarmuka grafis seperti yang ditunjukkan pada Gambar 2.10 [9].
Gambar 2.10 Antarmuka Grafis GEC-300 Excitation System [9]
PSS yang terdapat pada GEC-300 direpresentasikan dalam model matematis yang ditunjukkan dalam diagram blok pada Gambar 2.11.
Gambar 2.11 Power System Stabilizer di generator PLTU Pangkalan Susu [8]
Berdasarkan standar IEEE 421.5 tahun 1992, PSS pada GEC-300 adalah tipe PSS 2A dengan 2 masukan sinyal AC yaitu daya listrik dan kecepatan sudut rotor [10].
2.3.2 Bagian-Bagian PSS di PLTU Pangkalan Susu
PSS yang dipasang pada PLTU Pangkalan Susu memiliki bagian-bagian dan cara kerja seperti berikut ini [4,11] :
1. L
16
Filter adalah perangkat elektronik yang digunakan untuk melewatkan sinyal dengan rentang frekuensi tertentu [12]. PSS di PLTU Pangkalan Susu dilengkapi dengan low-pass filter dengan frekuensi cut-off [13]:
(2.32)
Gambar 2.12 Low Pass Filter [14]
Fungsi alih rangkaian pada Gambar 2.12 adalah sebagai berikut [14]:
(2.33)
dengan: dan maka:
(2.34)
dari Persamaan (2.34) kita ketahui bahwa parameter T7 dalam Gambar 2.11 secara fisik adalah nilai RC, dengan mengatur nilai T7, kita dapat mengatur frekuensi yang masuk ke dalam PSS.
2. R
amp-track Filter
17
Gambar 2.13 Blok ramp-track filter [13]
Gambar 2.13 menunjukkan blok ramp-track filter yang terdapat pada Gambar 2.13, filter memiliki parameter sesuai dengan Persamaan (2.35) berikut ini [15]:
(2.35)
Melalui ramp-track filter, sinyal yang keluar dari PSS dapat meniru sinyal kecepatan putaran rotor sehingga bekerja dengan lebih akurat dibandingkan PSS yang tidak memiliki filter tersebut [13].
3. W
ashout Filter
Washout filter adalah sebuah High-Pass Filter yang berfungsi untuk melewatkan hanya sinyal perubahan input yang cukup besar yang akan diolah oleh PSS. Filter ini memiliki frekuensi cut-off sebesar [13]:
(2.36)
Gambar 2.14 High Pass Filter [14]
Fungsi alih rangkaian pada Gambar 2.14 adalah sebagai berikut [14]:
18 dengan: dan maka:
(2.38)
dari Persamaan (2.38) kita ketahui bahwa parameter Tw1, Tw2 dan Tw3 dalam Gambar 2.11 secara fisik adalah nilai RC pada filter, dengan mengatur nilai Tw1, Tw2 dan Tw3 serta T7, maka PSS bekerja dalam wilayah kerja (bandwidth) yang bisa diatur sesuai kebutuhan.
4. L
ead-Lag Phase Compensator
Untuk meredam osilasi pada rotor, PSS harus menghasilkan sinyal torsi elektrik yang sefasa dengan perubahan deviasi kecepatan rotor. Hal tersebut membutuhkan kompensator fasa untuk mengompensasi lag antara output PSS dengan torsi elektrik yang dihasilkan [1].
Gambar 2.15 Lead-Lag Compensator [16]
Rangkaian pada Gambar 2.15 memiliki fungsi alih sebagai berikut [16]:
(2.39)
dari Persamaan (2.39) dapat diketahui kuantitas fisik parameter dalam Gambar 2.11 :
19
Besar fasa yang dihasilkan PSS untuk yang dihasilkan oleh lead-lag compensator dihitung menggunakan Persamaan (2.40) berikut ini [2]:
(2.40)
dimana :
: Fasa yang dihasilkan PSS
ω : frekuensi osilasi pada sistem tenaga
Penalaan PSS dilakukan dengan menentukan parameter-parameter pada tiap-tiap bagiannya sesuai dengan kondisi sistem tenaga tempatnya dipasang, oleh karena itu pemilihan penalaan PSS dilakukan setelah terlebih dahulu menentukan kondisi gangguan yang terjadi.
5. O
utput Voltage Limiter
Gambar 2.16 Pembatas Tegangan Ouput (Output Voltage Limiter) [12]
Pembatas tegangan pada PSS berfungsi untuk membatasi output PSS sehingga tidak bekerja pada keadaan yang tidak diharapkan. Pembatasan tegangan output PSS dilakukan dengan cara mengatur variabel-variabel pada Persamaan (2.41) dan (2.42) sebagai berikut [1, 12]:
20 2.4 Genetic Algorithm (Algoritma Genetika)
Algoritma Genetika (GA) adalah teknik pencarian heuristik yang didasarkan pada gagasan evolusi seleksi alam dan genetik. Algoritma ini memanfaatkan proses seleksi alamiah yang dikenal dengan proses evolusi. Dalam proses evolusi, individu secara terus menerus mengalami perubahan gen untuk menyesuaikan dengan lingkungan hidupnya [17].
GA diperkenalkan oleh John Holland pada tahun 1975 di Universitas Michigan untuk menyelesaikan permasalahan yang memiliki ciri sebagai berikut [17]:
1. Ruang pencarian sangat besar, kompleks, atau kurang dipahami
2. Tidak ada pengetahuan yang memadai untuk menyederhanakan ruang pencarian yang sangat besar menjadi ruang pencarian yang lebih sempit 3. Tidak ada analisis matematis yang bisa menangani ketika metode
konvensional gagal menyelesaikan masalah yang dihadapi
4. Solusi yang dihasilkan tidak harus optimal, asal sudah memenuhi kriteria sudah bisa diterima
5. Mempunyai kemungkinan solusi yang jumlahnya sangat banyak
21
membandingkan nilai fitness-nya. Sebuah representasi algoritma genetika yang efektif dan nilai fitness yang bermakna adalah kunci keberhasilan dalam aplikasi algoritma genetika.
Untuk memahami cara kerja GA, berikut ini beberapa istilah yang harus diketahui terlebih dahulu [17]:
a. Individu : representasi solusi dari permasalahan
b. Gen : variabel dalam solusi
c. Populasi : kumpulan dari individu dalam jumlah tertentu d. Generasi : siklus proses evolusi
e. Fitness : nilai yang menyatakan keoptimalan solusi Proses GA untuk mencari solusi adalah sebagai berikut [2, 17]:
1. Tahap penyandian (encoding), yaitu menyandikan gen dari individu. Gen dapat dikodekan kedalam tiga bentuk, namun yang digunakan pada penelitian ini adalah kode bilangan real :
a). kode biner (bilangan 0 dan 1)
contoh : 3 variabel (X1,X2,X3) dikodekan kedalam individu yang terdiri dari 3 gen yaitu X1(001), X2(010) dan X3(101).
b). kode bilangan real dimana nilai gen berada pada interval 0 sampai 1 contoh : 3 variabel (X1,X2,X3) dikodekan ke dalam individu yang terdiri dari 3 gen yaitu X1(0,5392), X2(0,6489) dan X3(0,1642).
22
contoh : 3 variabel (X1,X2,X3) dikodekan kedalam individu yang terdiri dari 9 gen, tiap-tiap variabel dikodekan kedalam 3 gen yaitu X1(212), X2(135) dan X3 (439).
2. Membentuk populasi awal
Untuk membentuk populasi awal, kita harus menentukan jumlah individu sebanyak N, kemudian membentuk populasi awal yang didalamnya terdapat N individu yang dengan gen didalamnya dipilih secara acak (random).
3. Memformulasikan fungsi objektif
Dalam mencari individu terbaik (solusi), maka tiap individu di dalam populasi akan dievaluasi melalui fungsi objektif. Setelah dievaluasi dengan fungsi objektif, maka tiap individu akan memiliki nilai fitness yang menyatakan kemampuan individu untuk bertahan hidup.
4. Elitisme
Elitisme adalah proses penyalinan individu yang memiliki nilai fitness terbaik pada satu proses generasi untuk mencegah hilang atau rusaknya individu tersebut pada saat proses mutasi dan kawin silang.
5. Pindah silang (crossover)
Pindah silang adalah proses memasangkan dua individu sebagai induk untuk mendapatkan anak. pindah silang yang digunakan pada penelitian ini adalah metode “pindah silang seragam”.
6. Mutasi
23
Langkah-langkah nomor 1-6 diulang sampai jumlah generasi tertentu dan hasil yang terbaik sudah diperoleh. Gambar 2.17 menunjukkan diagram alir dari Genetic Algorithm [18].
![Gambar 2.1 Interaksi torsi mekanik dan elektrik pada generator [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1784377.1132318/1.595.158.507.557.648/gambar-interaksi-torsi-mekanik-dan-elektrik-pada-generator.webp)
![Gambar 2.2 GGM rotor, stator, resultan GGM dan sudut torsi [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1784377.1132318/2.595.261.404.297.432/gambar-ggm-rotor-stator-resultan-ggm-sudut-torsi.webp)
![Gambar 2.3 Pembangkit tunggal terhubung ke bus tak hingga [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1784377.1132318/3.595.192.441.182.244/gambar-pembangkit-tunggal-terhubung-ke-bus-tak-hingga.webp)
![Gambar 2.4 Diagram blok SMIB sederhana [5]](https://thumb-ap.123doks.com/thumbv2/123dok/1784377.1132318/5.595.161.478.68.218/gambar-diagram-blok-smib-sederhana.webp)
![Gambar 2.5 Osilasi antar-unit (inter-unit oscillations) [4]](https://thumb-ap.123doks.com/thumbv2/123dok/1784377.1132318/7.595.205.459.72.165/gambar-osilasi-antar-unit-inter-unit-oscillations.webp)
![Gambar 2.9 Skematik generator PLTU dengan AVR dan PSS [7]](https://thumb-ap.123doks.com/thumbv2/123dok/1784377.1132318/11.595.123.518.275.475/gambar-skematik-generator-pltu-dengan-avr-dan-pss.webp)
![Gambar 2.11 Power System Stabilizer di generator PLTU Pangkalan Susu [8]](https://thumb-ap.123doks.com/thumbv2/123dok/1784377.1132318/12.595.191.475.127.298/gambar-power-system-stabilizer-generator-pltu-pangkalan-susu.webp)
![Gambar 2.12 Low Pass Filter [14]](https://thumb-ap.123doks.com/thumbv2/123dok/1784377.1132318/13.595.225.412.187.311/gambar-low-pass-filter.webp)
![Gambar 2.13 Blok ramp-track filter [13]](https://thumb-ap.123doks.com/thumbv2/123dok/1784377.1132318/14.595.270.392.72.143/gambar-blok-ramp-track-filter.webp)
