Kontrol Optimal Pada Motor DC Menggunakan Metode Linear Quadratic
Regulator (LQR)
Unis Badri
1), Agus Indra Gunawan, ST, M. Sc
2), Ir. Kemalasari, MT
3), Alrijadjis, Dipl. Eng
4) 1) Department of electronic engineering, electronic engineering polytechnic institute of Surabaya ITS SurabayaIndonesia 60111, email : [email protected]
Abstrak
Pada desain sistem kontrol yang baik harus memenuhi persyaratan – persyaratan tertentu yang telah ditetapkan. Persyaratan yang harus dipenuhi sistem kontrol disebut sebagai indeks unjuk kerja (performance index). Indeks ini berkaitan dengan ketelitian, kestabilan dan kecepatan tanggapan sistem. Sistem kontrol dianggap optimal jika harga – harga parameter dipilih sedemikian rupa sehingga indeks unjuk kerja yang dipilih maksimum atau minimum. Sistem kontrol yang dirancang berdasarkan optimasi indeks unjuk kerja disebut sistem kontrol optimal. Pada desain Teknik kontrol optimal Linear Quadratic Regulator (LQR) untuk pengaturan kecepatan motor dc, optimasi indeks unjuk kerja dilakukan dengan mengatur nilai matriks Q, yang nantinya dapat menghasilkan matriks penguat umpan balik K dan matriks tracking L yang optimal untuk indeks unjuk kerja motor dc. Implementasi LQR dalam mikrokontroller untuk mengatur kecepatan motor dc merupakan target utama dalam proyek akhir ini. Motor dc yang hendak dikontrol perlu diketahui nilai transfer functionnya agar dapat dirubah kedalam bentuk state space sehingga bias dimasukkan kedalam pehitungan metode LQR. Adanya software matlab juga digunakan untuk mensimulasikan metode Linear Quadratic Regulator sebelum dirubah kedalam bentuk bahasa C.
Kata kunci: Linear Quadratic Regulator (LQR), motor
DC, indeks unjuk kerja.
I.PENDAHULUAN A. Latar Belakang
Kontrol otomatis saat ini telah menjadi bagian penting dalam pengembangan ilmu pengetahuan dan teknologi. Kemajuan dalam bidang otomatik ini telah memberikan kemudahan dalam mendapatkan indeks performansi.dari system, menghilangkan pekerjaan pekerjaan yang membosankan yang harus dilakukan manusia maupun meningkatkan jumlah produksi suat produk.
Persoalan control optimal telah menarik perhatian yang sangat besar selama dasawarsa terakhir sebagai akibat meningkatnya system dengan performansi tinggi dan kepresisian yang tinggi pula disamping tersedianya computer digital. Untuk menyelesaikan persoalan system control optimal, perlu dicari suatu aturan untuk pengambilan keputusan suatu control optimal, dengan beberapa kendala-kendala tertentu, yang akan meminimumkan penyimpangan dari kondisi idealnya. Ukuran ini biasanay berdasarkan pada indeks performansi kerja system.
Pada proyek akhir ini digunakan motor DC magnet permanent sebagai plant dari system yang akan
dikontrol dengan teknik control optimal Linear Quadratic Regulator (LQR).
Usaha dalam mengimplementasikan Linear Quadratic Regulator kedalam mikrokontroller merupakan salah satu pencapaian yang tinggi dalam perkembangan ilmu dan teknologi.
B. Batasan Masalah
Kompleksnya permasalahan yang terdapat dalam usaha pengimplementasian metode LQR dalam mikrokontroller maka perlu adanya batasa-batasan sebagai berikut:
1. Digunakan pemodelan matematis sistem sederhana orde satu pada motor DC dengan pendekatan metode Zigler Nichols.
2. Pengontrolan yang dilakukan hanya pada kecepatan saja.
3. Teknik kontrol yang digunakan adalah teknik kontrol optimal Linear Quadractic Regulator (LQR)
4. Perancangan linear quadratic regulator secara off-line dengan nilai matriks pembobot kendali R konstan yaitu 1(satu) dan nilai Q = (0.1, 0.01, 0.001, 0.0001, 1, 2, 3, 10, 100).
5. Tegangan yang diberikan pada motor sebesar 12 volt.
6. Range kecepatan motor yang diatur adalah 1500 rpm, 1700 rpm, 1900 rpm.
7. Pembahasan dititik beratkan pada analisa respon transient pada plan tanpa gangguan dari luar.
8. Pengujian karakteristik sistem difokuskan tanpa menggunakan beban serta tidak menghiraukan pengaruh gangguan dari luar yaitu meliputi 4 (empat) hal:
- Rise Time - Setting
Time
- Error State - Over
Shoot
II. DASAR TEORI A. Model Matematik Sistem
Model matematik dari dari system dapat disajikan dalam yang berbeda bergantung dari system yang akan ditinjau. Sebagai contoh dalam permasalahan kotrol optimal, akan lebih mudah menggunakan system orde pertama yang dirubah dalam bentuk statespace karena perhitungannya cukup mudah. Sebaliknya dalam analisis respon transien dan respon ferkuensi suatu system satu masukan dan satu keluaran akan lebih mudah jika disajikan dengan menggunakan fungsi alih(transfer function).
A.1. Fungsi Alih
Fungsi alih system linear parameter konstan didefinisikan sebagai perbandingan antara transformasi
laplace dengan keluaran (fungsi respon y) dan transformasi laplace masukan (fungsi referensi u) dengan anggapan bahwa semua syarat awal adalah bernilai nol.
Fungsi alih tidak memberikan informasi system fisik dari suatu sisten namun memberikan informasi matematis.
Pangkat tertinggi dari S pada penyebut fugsi alih sama dengan orde turunan tertinggi dari keluaran. Jika pangkat tertinggi dari system adalah n maka system tersebut disebut system orde ke-n.
A.2 Persamaan Ruang Keadaan (State Space)
Penyajian model matematik system dalam bentuk ruang keadaan (state space) pada dasarnya adalah menyusun hubungan antara masukan –keluaran system dalam persamaan diferensial orde pertama dengan menggunakan notaasi matriks-vektor.
Misalkan suatu persamaan diferensial system orde ke n sebagai berikut:
(2.1)
Dimana y adalah keluaran system dan u adalah masukan. Untuk membuat model matematik persamaan (2.1) kedalam persamaan ruang keadaan, maka hal pertaman yang harus dilakukan adalah menyusun persamaan (2.1) kedalam persamaan orde pertama. Jika dimisalkan;
Selanjutnya persamaan (2.9) dapat ditulis sebagai
atau
(2.2)
Dimana
Persamaan keluaran menjadi
Atau
(2.3)
Dimana
Nilai A, B dan C berturut turut dikenal sebagai matriks parameter keadaan, parameter input dan parameter output. Persamaan (2.2) dan (2.3) berikutnya dikenal dengan persamaan ruang kedaan (state space).[4]
B. Karakteristik System Orde Satu
System orde pertama merupakan system yang paling sederhana. sistem ini biasa dinyatakan dalam model matematik dengan fungsi alih sebagai berikut:
(2.4) seperti yang telah diulas sebelumnya mengenai penjelasan untuk mendapatkan fungsi transfer tersebut. Dalam bentuk ruang keadaan (state space)[4].
Jika
(2.4)
(2.5) Sehingga nilai state space dapat diketahui dengan rumus berikut,
(2.6) Nilai pole loop terbuka system ini adalah,
(2.7)
Dua parameter penting pada system orde satu adalah gain statis K dan konstanta waktu T. Solusi masukan-keluaran system orde satu terhadap input konstanta N (respon step) diberikan oleh invers tranformasi laplace:
(2.8)
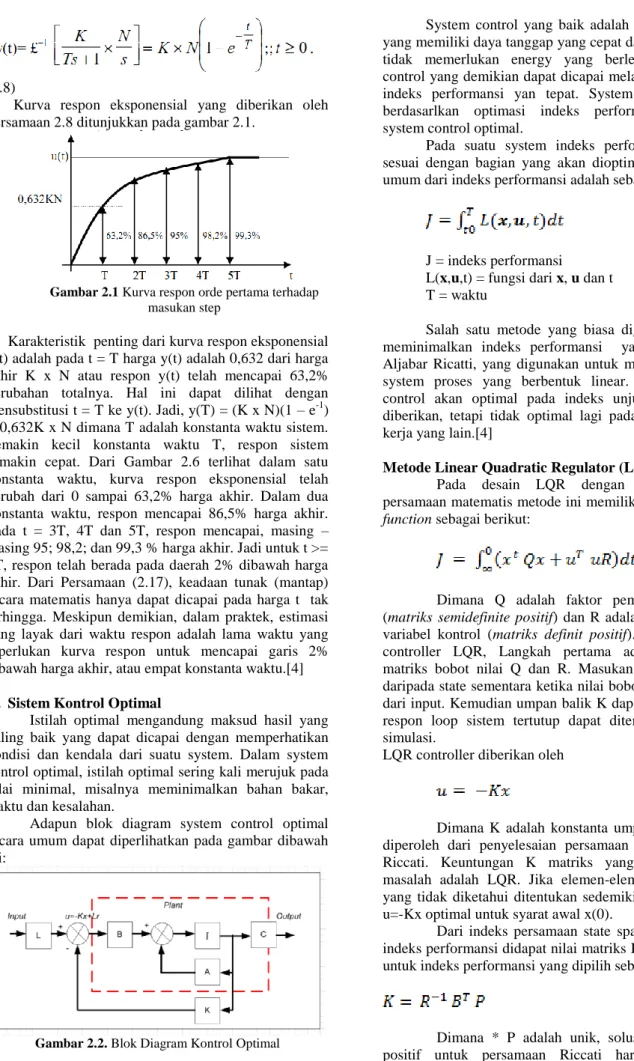
Kurva respon eksponensial yang diberikan oleh persamaan 2.8 ditunjukkan pada gambar 2.1.
Gambar 2.1 Kurva respon orde pertama terhadap
masukan step
Karakteristik penting dari kurva respon eksponensial y(t) adalah pada t = T harga y(t) adalah 0,632 dari harga akhir K x N atau respon y(t) telah mencapai 63,2% perubahan totalnya. Hal ini dapat dilihat dengan mensubstitusi t = T ke y(t). Jadi, y(T) = (K x N)(1 – e-1) = 0,632K x N dimana T adalah konstanta waktu sistem. Semakin kecil konstanta waktu T, respon sistem semakin cepat. Dari Gambar 2.6 terlihat dalam satu konstanta waktu, kurva respon eksponensial telah berubah dari 0 sampai 63,2% harga akhir. Dalam dua konstanta waktu, respon mencapai 86,5% harga akhir. Pada t = 3T, 4T dan 5T, respon mencapai, masing – masing 95; 98,2; dan 99,3 % harga akhir. Jadi untuk t >= 4T, respon telah berada pada daerah 2% dibawah harga akhir. Dari Persamaan (2.17), keadaan tunak (mantap) secara matematis hanya dapat dicapai pada harga t tak terhingga. Meskipun demikian, dalam praktek, estimasi yang layak dari waktu respon adalah lama waktu yang diperlukan kurva respon untuk mencapai garis 2% dibawah harga akhir, atau empat konstanta waktu.[4]
C. Sistem Kontrol Optimal
Istilah optimal mengandung maksud hasil yang paling baik yang dapat dicapai dengan memperhatikan kondisi dan kendala dari suatu system. Dalam system control optimal, istilah optimal sering kali merujuk pada nilai minimal, misalnya meminimalkan bahan bakar, waktu dan kesalahan.
Adapun blok diagram system control optimal secara umum dapat diperlihatkan pada gambar dibawah ini:
Gambar 2.2. Blok Diagram Kontrol Optimal
System control yang baik adalah system control yang memiliki daya tanggap yang cepat dan stabil, tetapi tidak memerlukan energy yang berlebihan. Sistem control yang demikian dapat dicapai melalui pengaturan indeks performansi yan tepat. System control yang berdasarlkan optimasi indeks performansi disebut system control optimal.
Pada suatu system indeks performansi dipilih sesuai dengan bagian yang akan dioptimalkan. Bentuk umum dari indeks performansi adalah sebagai berikut:
(2.9)
J = indeks performansi L(x,u,t) = fungsi dari x, u dan t T = waktu
Salah satu metode yang biasa digunakan untuk meminimalkan indeks performansi yaitu persamaan Aljabar Ricatti, yang digunakan untuk mengoptimalkan system proses yang berbentuk linear. Suatu system control akan optimal pada indeks unjuk kerja yang diberikan, tetapi tidak optimal lagi pada indeks unjuk kerja yang lain.[4]
Metode Linear Quadratic Regulator (LQR)
Pada desain LQR dengan menggunakan persamaan matematis metode ini memiliki rumusan cost function sebagai berikut:
(2.10)
Dimana Q adalah faktor pembobotan state (matriks semidefinite positif) dan R adalah bobot faktor variabel kontrol (matriks definit positif). Untuk desain controller LQR, Langkah pertama adalah memilih matriks bobot nilai Q dan R. Masukan R lebih berat daripada state sementara ketika nilai bobot Q state lebih dari input. Kemudian umpan balik K dapat dihitung dan respon loop sistem tertutup dapat ditemukan dengan simulasi.
LQR controller diberikan oleh
(2.11)
Dimana K adalah konstanta umpan balik yang diperoleh dari penyelesaian persamaan aljabar diskrit Riccati. Keuntungan K matriks yang memecahkan masalah adalah LQR. Jika elemen-elemen matriks K yang tidak diketahui ditentukan sedemikian rupa, maka u=-Kx optimal untuk syarat awal x(0).
Dari indeks persamaan state space system dan indeks performansi didapat nilai matriks K yang optimal untuk indeks performansi yang dipilih sebagai:
(2.12)
Dimana * P adalah unik, solusi semidefinite positif untuk persamaan Riccati harus memenuhi persamaan tereduksi berikut;
(2.13)
Persamaan (1.12) disebut persamaan ricatti. Dalam perancangan teknik control optimal linear kuadratik regulator (LQR), setelah matriks P diketahui maka nilai P tersebut disubtitusikan kedalam persamaan (1.11) sehingga didapatkan nilai matriks optimal K.
Permasalahan yang umum ditemui dalam bidang kendali yaitu tidak hanya menstabilkan system, tetapi bagaimana keluaran system mengikuti perubahan set point atau referensi yang ditentukan. Dalam hal ini jika diinginkan keluaran plant (Y) sama dengan input referensi maka perlu dirancang sistemnya menggunakan nonzero setpoint/tracking. Bentuk umum sinyal kendali nonzero set poit tracking adalah:[4]
(2.14) Dimana
(2.15)
Dalam plant nyata maka r merupakan nilai referensi atau jika dalam control kecepatan ini merupakan nilai referensi atau set point nilai kecepatan yang diinginkan dan x merupakan output dari sensor kecepatan.
D. Motor DC Magnet Permanen dan Pengendalinya
Gambar 2.3. Rangkaian ekivalen motor DC Untuk mendapatkan nilai transfer function yang kita inginkan dari sebuah motor, digunakan pendekatan dengan metode Tuning Zigler Nichols. Tetapi ada dua kelemahan dengan aturan ini:
- Terlalu sedikitnya proses informasi yang digunakan
- System close-loop yang diperoleh ro-bustness kurang.
Tuning substansi yang lebih baik diperoleh dengan sebuah model pada sebuah step response.
(2.16)
Cara mudah untuk melakukan pendekatan ini diilustrasikan dalam gambar dibawah ini:
Gambar 2.4. karakteristik dari unit step response. Titik
dimana garis singgung yang curam ditandai dengan lingkaran kecil
Nilai frekwensi gain dari sebuah proses K ditentukan dari nilai steady state dari step response. Time delay (Tdel) ditentukan dari garis singgung step response dan T63 dimana output telah mencapai 63%
dari nilai steady state-nya. Nilai parameter T diperoleh dari T63 – Tdel. Setelah didapatkan transfer functionnya
maka dapat dicari nilai stste space nya dengan menggunakan program mathlab.
Sebelumnya cara untuk mendapatkan nilai 0.63K adapun penurunan rumusnya adalah sebagai berikut.
Laplace Transform:
(2.17)
(1.3)
fungsi alih (transfer function)
kenyataannya : solusi persamaan tersebut mengalihkan input ke output. Proses yang diwakili oleh fungsi alih di atas disebut: proses orde-satu atau sistem orde-satu atau lag orde-satu.
Jika Ti(t) dinaikkan maka step change-nya juga berubah. (2.18) (2.19) Maka: (2.20) (2.21) (2.22) Pada
Gambar 2.5. Unit step response.
III. PERANCANGAN SISTEM
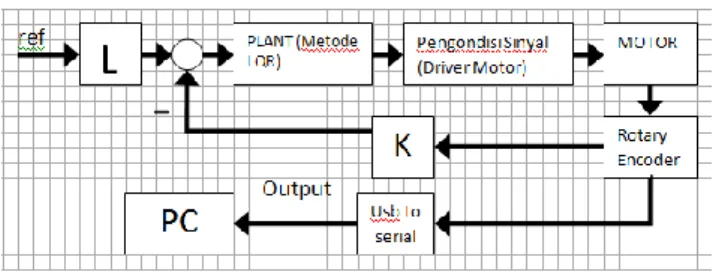
Diagram blok untuk pengaturan kecepatan motor DC menggunakan teknik control optimal linear kuadratik regulator yang digunakan pada proyek akhir ini ditunjukkan pada gambar berikut:
Gambar 3.1. Diagram blok untuk pengaturan kecepatan motor
DC menggunakan teknik control optimal linear kuadratik regulator
A. Perancangan Linear Quadratic Regulator (LQR)
A.1. Identifikasi Plan Motor DC
Pada pemodelan plant motor dc proyek akhir ini, motor dc diberikan inputan unit step tegangan sebesar 12 volt. Kemudian dari motor tersebul disampling sebesar 10milisecond untuk diambil datanya. Nilai kecepatan dari pembacaan sensor tadi dibuat kedalam bentuk grafik agar dapat dicari niali transfer functionnya dengan menggunakan pendekatan metode ziglernichols.
Gambar 3.2 Grafik respon kecepatan motor DC Dapat dilihat dari gambar 4.2 dengan menggunakan pendekatan metode zigler nichols orde pertama bahwa respon mencapai kondisi stedy state pada sumbu Y bernilai 1950rpm. Nilai input tegangan yang diberikan adalah 12 volt sehingga didapatkan nilai K sebesar 162.5. sedangkan nilai T sebesar 0.632 dari kondisi staedy state maka berada pada 1232.4 rpm dan nilai T pada titik itu sebesar 0.01s. Maka dapat dimasukkan kedalam persamaan.
(3.1) Sehingga didapatkan rumus transfer function sebagai berikut:
(3.2)
A.2 Penentuan Penguat umpan balik K
Setelah didapatkan transfer function motor DC maka langkah selanjutnya adlah mencari statespace dari transfer function tersebut. Dengan bantuan software matlab di dapatkan nilai spate space sebagai berikut:
A = [ -100] B = [ 108]
C = [1] D =[0]
Sedangkan untuk nilai Q dan R : R= [1]
Q= dengan nilai bervariasi
Para perancangan proyek akhir ini dipilih 10 nilai Q yaitu:
Q={0.0000001, 0.0001, 0.001, 0.01, 0.1, 1, 2, 3, 10, dan 100}
Kemudian dengan menggunakan persamaan Ricatti (2.13), setelah itu nilai P disubtitusikan ke persamaan Kallman. Dan hasilnya seperti table dibawah ini:
Tabel 3.1. Hasil Perhitungan Matriks K
no nilai Q
Nilai K
1 0.0000001
3.24E-06
2
0.0001
5.40E-05
3
0.001
5.40E-04
4
0.01
0.0054
5
0.1
0.0525
6
1
0.4369
7
2
0.7644
8
3
1.0381
9
10
2.3691
10
100
9.1168
A.3. Penentuan Matriks Non Zero Set Point L
Untuk menentukan nulai L maka digunakan persamaan non zero set point tracking(2.15).Dari persamaan tersebut nilai didapatkan untuk masing masing nilai Q seperti table dibawah ini:
Tabel 3.2. Hasil Perhitungan Matriks L
A.4. implementasi Teknik Kontrol Optimal Linear Quadratic Regulator pada Mikrokontroller
Berdasarkan Diagram blok Gambar 4 dapat disusun suatu algoritma untuk pengaturan dengan Linear Quadratic Regulator (LQR) sebagai berikut:
1. Membaca nilai referensi (ref)
no nilai Q
Nilai L
1 0.0000001
0.9259
2
0.0001
0.926
3
0.001
0.9265
4
0.01
0.9313
5
0.1
0.9784
6
1
1.3628
7
2
1.6904
8
3
1.964
9
10
3.295
10
100 10.0428
2. Membaca nilai keluaran kecepatan motor sebenarnya (out)
3. Menghitung sinyal kontrol Linear Quadratic Regulator (control)
control=(ref x L) – (out x K)
Nilai L dan K ditentukan dari perancangan Linear Quadratic Regulator.
4. Mengirim sinyal kontrol Linear Quadratic Regulator ke plant
5. Kembali ke langkah 1 jika akan terus melakukan pengontrolan
Algoritma diatas dapat disusun dalam bentuk flowchart seperti diperlihatkan pada gambar 3.3.
Gambar 3.3. Flowchart implementasi Linear Quadratic
Regulator
B. Perancangan Hardware
Gambar 3.4 Rancangan Elektronik
Berikut penjelasan fungsi dari masing – masing hardware :
Mikrokontroler : mengolah data yang masuk dari rotary encoder, memberikan informasi hasil pemrosesan data dari sensor ke PC, dan juga driver motor.
Rotary encoder : memberikan signal digital dari putaran motor, yang selanjutnya signal digital ini dapat diproses dan dikonversikan menjadi besaran PWM.
Driver motor : mengatur arah putaran motor sesuai perintah dari mikrokontroller, sekaligus menjadi penguat arus dan pengaman pada motor.
PC : bertugas menerima data yang masuk pada serial port, dan kemudian menggaktifkan data tersebut, sehingga error dapat terlihat dan dianalisa.
Power supply: bertugas untuk men-supply tegangan pada motor sehingga motor dapat berputar.
Motor sebagai penggerak dari implementaasi metode Linear Quadratic Regulator.
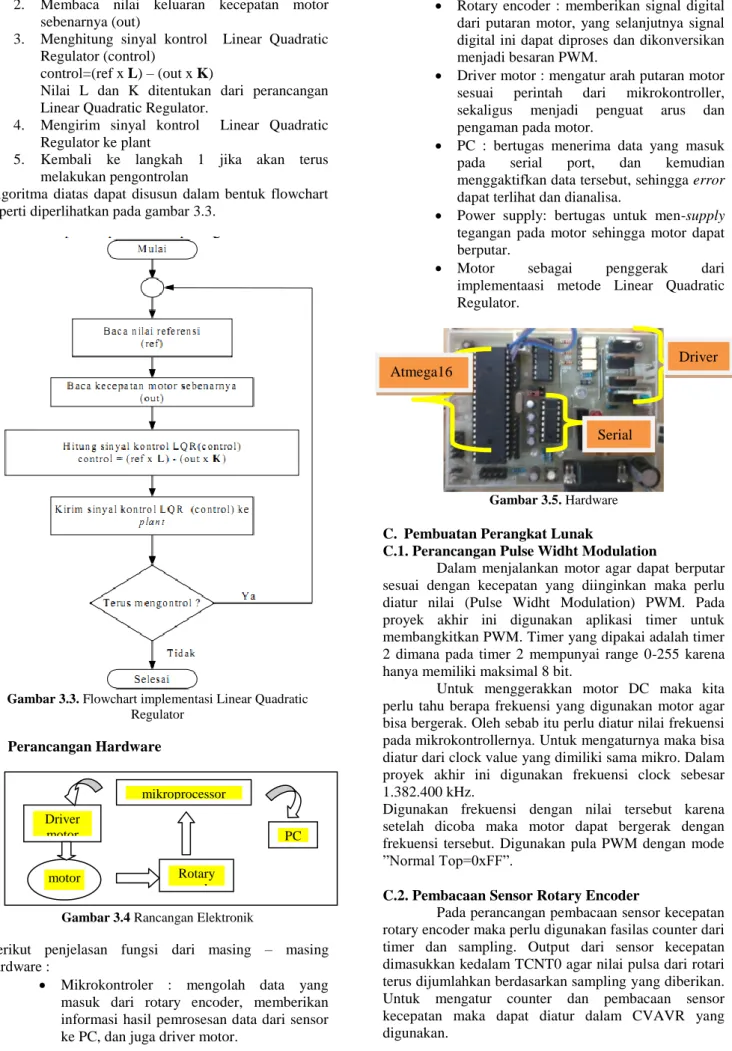
Gambar 3.5. Hardware
C. Pembuatan Perangkat Lunak
C.1. Perancangan Pulse Widht Modulation
Dalam menjalankan motor agar dapat berputar sesuai dengan kecepatan yang diinginkan maka perlu diatur nilai (Pulse Widht Modulation) PWM. Pada proyek akhir ini digunakan aplikasi timer untuk membangkitkan PWM. Timer yang dipakai adalah timer 2 dimana pada timer 2 mempunyai range 0-255 karena hanya memiliki maksimal 8 bit.
Untuk menggerakkan motor DC maka kita perlu tahu berapa frekuensi yang digunakan motor agar bisa bergerak. Oleh sebab itu perlu diatur nilai frekuensi pada mikrokontrollernya. Untuk mengaturnya maka bisa diatur dari clock value yang dimiliki sama mikro. Dalam proyek akhir ini digunakan frekuensi clock sebesar 1.382.400 kHz.
Digunakan frekuensi dengan nilai tersebut karena setelah dicoba maka motor dapat bergerak dengan frekuensi tersebut. Digunakan pula PWM dengan mode ”Normal Top=0xFF”.
C.2. Pembacaan Sensor Rotary Encoder
Pada perancangan pembacaan sensor kecepatan rotary encoder maka perlu digunakan fasilas counter dari timer dan sampling. Output dari sensor kecepatan dimasukkan kedalam TCNT0 agar nilai pulsa dari rotari terus dijumlahkan berdasarkan sampling yang diberikan. Untuk mengatur counter dan pembacaan sensor kecepatan maka dapat diatur dalam CVAVR yang digunakan. mikroprocessor Driver motor PC Rotary encoder motor
Driver Serial Atmega16
Clock source pada timer 0 = T0 pin Rising Edge artinya ketika rotary pada logika high maka akan dibaca sama timer counter 0 dan ketika mendapatkan low akan tetap dan tidak terbaca.
Sedangkan untuk sampling pada rotary encoder digunakan timer 1 dengan memanfaatkan fasilitas timer interupt overflow. Untuk mengatur waktu sampling maka perhitungannya seperti berikut:
(3.3)
C.3. Perencanaan Model Motor DC
Untuk mencari transfer function dari motor DC, dapat digunakan bebrapa cara serta pendekatan matematis. Secara hardware dicari dengan menggunakan alat dibawah ini:
Menggunkan XY Recorder
Pemberian Tegangan pada motor
Pemberian Pulsa pada motor
Pada pemodelan plant motor dc proyek akhir ini, motor dc diberikan inputan unit step tegangan sebesar 12 volt. Kemudian dari motor tersebul disampling sebesar 10milisecond untuk diambil datanya. Nilai kecepatan dari pembacaan sensor tadi dibuat kedalam bentuk grafik agar dapat dicari niali transfer functionnya dengan menggunakan pendekatan metode ziglernichols.
Gambar 3.6. Grafik respon kecepatan motor DC Dapat dilihat dari gambar 3.7 dengan menggunakan pendekatan metode zigler nichols orde pertama bahwa respon mencapai kondisi stedy state pada sumbu Y bernilai 1950rpm. Nilai input tegangan yang diberikan adalah 12 volt sehingga didapatkan nilai K sebesar 162.5. sedangkan nilai T sebesar 0.632 dari kondisi staedy state maka berada pada 1232.4 rpm dan nilai T pada titik itu sebesar 0.01s. Maka dapat dimasukkan kedalam persamaan.
(3.4)
Sehingga didapatkan rumus transfer function sebagai berikut:
(3.5)
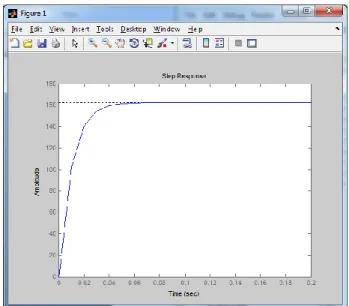
Dengan bantuan matlab dapat disimulasikan hasil dari permodelan motor DC nya, apakah sudah sama antara hasil grafik pengambilan data dengan simulasi di matlab. Jika sudah sama maka dapat dikatakan bahwa permodelan motor sudah benar.
Gambar 3.7. Grafik respon pada matlab Dari gambar hasil simulasi dapat diketahui bahwa waktu yang dibutuhkan plan untuk mencapai kondisi stabil sama dengan hasil percobaan yang dilakukan pada motor. Sehingga hasil transfer function dapat mewakili nilai matematis dari plan.
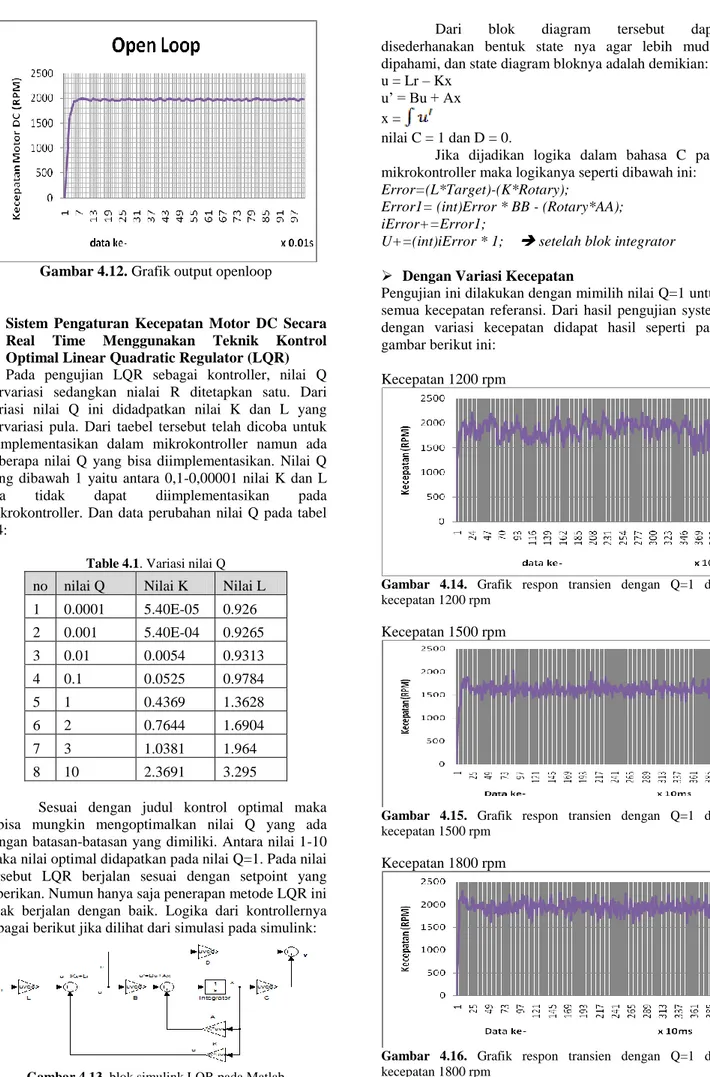
IV. PENGUJIAN DAN ANALISA A. Sistem Open Loop
Pada pengujian sistem secara openloop ini plant diberi PWM makasimal 255 dan tanpa beban untuk mengetahui bagaimana respon kecepatan motor DC. Pada system openloop tidak ada feedback yang dikembalikan ke dalam plant sehingga tidak ada Error selesih anatara masukan dan keluaran. Di pengujian ini plant juga diberi tegangan maksimal agar nantinya bisa didapatkan permodelan dari plant. Nantinya output dari sensor kecepatan akan dikirim melalui serial ke PC dan ditampilkan grafiknya dalam software visual basic maupun excel. Kecenderungan dari system openloop adalah nilai output tidak stabil.
Pada gamabr 4.12 Nampak bahwa output system mencapai kondisi steady state pada kecepatan mendekati 2000 rpm dan detail datanya tepat adalah 1950 rpm. Waktu untuk mencapai kondisi steady state masih kurang cepat sehingga perlu adanya controller agar plant bisa mendapatkan respon yang lebih baik.
Gambar 4.12. Grafik output openloop
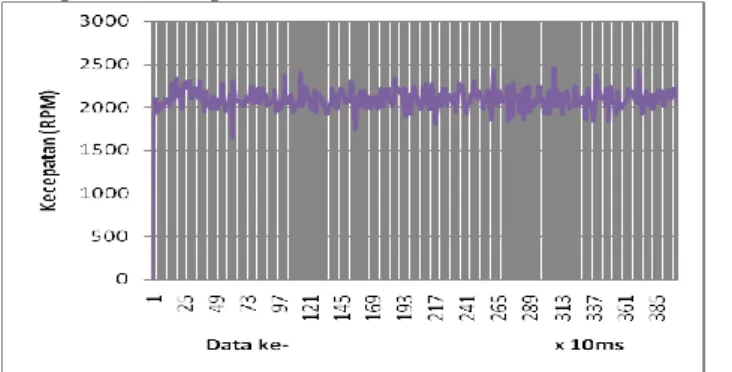
B. Sistem Pengaturan Kecepatan Motor DC Secara Real Time Menggunakan Teknik Kontrol Optimal Linear Quadratic Regulator (LQR) Pada pengujian LQR sebagai kontroller, nilai Q bervariasi sedangkan nialai R ditetapkan satu. Dari variasi nilai Q ini didadpatkan nilai K dan L yang bervariasi pula. Dari taebel tersebut telah dicoba untuk diimplementasikan dalam mikrokontroller namun ada beberapa nilai Q yang bisa diimplementasikan. Nilai Q yang dibawah 1 yaitu antara 0,1-0,00001 nilai K dan L nya tidak dapat diimplementasikan pada mikrokontroller. Dan data perubahan nilai Q pada tabel 4.4:
Table 4.1. Variasi nilai Q
Sesuai dengan judul kontrol optimal maka sebisa mungkin mengoptimalkan nilai Q yang ada dengan batasan-batasan yang dimiliki. Antara nilai 1-10 maka nilai optimal didapatkan pada nilai Q=1. Pada nilai tersebut LQR berjalan sesuai dengan setpoint yang diberikan. Numun hanya saja penerapan metode LQR ini tidak berjalan dengan baik. Logika dari kontrollernya sebagai berikut jika dilihat dari simulasi pada simulink:
Gambar 4.13. blok simulink LQR pada Matlab
Dari blok diagram tersebut dapat disederhanakan bentuk state nya agar lebih mudah dipahami, dan state diagram bloknya adalah demikian: u = Lr – Kx
u’ = Bu + Ax x =
nilai C = 1 dan D = 0.
Jika dijadikan logika dalam bahasa C pada mikrokontroller maka logikanya seperti dibawah ini: Error=(L*Target)-(K*Rotary);
Error1= (int)Error * BB - (Rotary*AA); iError+=Error1;
U+=(int)iError * 1; setelah blok integrator Dengan Variasi Kecepatan
Pengujian ini dilakukan dengan mimilih nilai Q=1 untuk semua kecepatan referansi. Dari hasil pengujian system dengan variasi kecepatan didapat hasil seperti pada gambar berikut ini:
Kecepatan 1200 rpm
Gambar 4.14. Grafik respon transien dengan Q=1 dan
kecepatan 1200 rpm
Kecepatan 1500 rpm
Gambar 4.15. Grafik respon transien dengan Q=1 dan
kecepatan 1500 rpm
Kecepatan 1800 rpm
Gambar 4.16. Grafik respon transien dengan Q=1 dan
kecepatan 1800 rpm
no nilai Q Nilai K Nilai L 1 0.0001 5.40E-05 0.926 2 0.001 5.40E-04 0.9265 3 0.01 0.0054 0.9313 4 0.1 0.0525 0.9784 5 1 0.4369 1.3628 6 2 0.7644 1.6904 7 3 1.0381 1.964 8 10 2.3691 3.295
Kecepatan 1950 rpm
Gambar 4.17. Grafik respon transien dengan Q=1 dan
kecepatan 1950 rpm
Berdasarkan grafik-grafik pengujian system dengan menggunakan Linear Quadratic Regulator (LQR) dengan variasi kecepatan pada gambar 4.14 sampai gambar 4.17 terlihat bahwa pada kecepatan 1200 rpm, controller tidak mampu mencapai setpoint yang diinginkan. Hal ini bisa jadio disebabakan karena rendahnya nilai setpoint yang diberikan sehingga motor tidak mampu menjangkau referansi tersebut. Sedangkan pada kecepatan 1500, 1800 dan 1950 rpm, motor mampu berputar berdasarkan setpoint yang diberikan walaupun ada sedikit error. Tabel %error antara setpoint dengan output kecepatan motor dapat dilihat dalam tabel berikut:
Tabel 4.2. % Error antara setpoint dengan output kecepatan Set point (RPM) Rata-rata kecepatan (RPM) % Error 1200 1867 55.6 1500 1613 7.5 1800 1936 7.5 1950 2090 7.2
Dari hasil tabel 4.2 dapat dilihat bahwa error terbesar pada set point kecepatan 1200 rpm. Sedangkan untuk kecepatan yang lain, error tidak lebih dari 10%. Itu artinya bahwa dari beberapa pengujian yang dilakukan dengan variasi kecepatan bisa dikatakan berhasil karena perbandingan antara yang sesuai dengan target dan yang tidak maka lebih besar yang telah memenuhi target. Toleransi error dalam pengujian adalah 10 persen. Dimana hasil dari pengujian ini pada kecepatan 1500-1950 rpm, error yang didapatkan adalah rata-rata 7.4 %.
Dengan Variasi Nilai Q
Pengujian ini dilakukan dengan memilih kecepatan 1800 rpm untuk semua nilai Q karena pada pengujian sebelumnya pada kecepatan 1800 rpm didapat nilai Error yang dibawah toleransi. Dari hasil pengujian system dengan variasi nilai Q dapat diperlihatkan pada gambar 4.18 sampai 4.20. Dengan nilai Q yang digunakan adalah 1, 2, dan 3 karena jika digunakan nilai Q yang dibawah satu maka system tidak berjalan dan motorpun tidak dapat berputar.
Nilai Q = 1
Gambar 4.18. Grafik respon transien dengan Q=1 dan
kecepatan 1800 rpm
Nilai Q = 2
Gambar 4.19. Grafik respon transien dengan Q=2 dan
kecepatan 1800 rpm
Nilai Q = 3
Gambar 4.20. Grafik respon transien dengan Q=3 dan
kecepatan 1800 rpm
Dari grafik-grafik pengujian system dengan Linear Quadratic Regulator (LQR) untuk variasi nilai Q, terlihat bahwa kecepatan putar motor hampir sama namun sedikit saja perbedaan yang ditunjukkan dari variasi nilai Q. Nampak bahwa dengan diberikannya nilai Q yang semakin besar maka overshoot dari respon semakin berkurang akan tetapi tidak memenuhi setpoint yang ditentukan seperti gamabr 4.20 ketika nilai Q=3. Nilai optimal dalam variasi nilai Q ini berada pada range Q=1 dan Q=2 dimana pada range antara nilai Q 1-2, controller mampu menjalankan motor agar berputar berdaasarkan setpoint yang diberikan. Dimana tabel perbandingan % Error nilai Q dan output kecepatan dapat dilihat dalam tabel 4.3.
Tabel 4.3. %Error variasi nilai Q dengan rata-rata keceptan
motor
Nilai Q Rata-rata kecepatan
(RPM) % Error
1 1936 7.6
2 1929 7.2
3 2021 12.3
Pada nilai Q=3 didapat nilai Error yang melebihi toleransi sebesar 10% sedangkan pada Q=1 dan Q=2 nilai Error tidak lebih dari 10 % artinya controller dapat bekerja dengan baik. Dengan variasi nilai Q ini dapat diketahui bahwa pada plant ini controller bekerja dengan optimal pada range Q sebesar 1 dan 2. Sesuai dengan prinsip control optimal dimana dari range nilai Q yang ditentukan maka akan ada nilai terbaik yang akan menghasilkan respon yang diharapkan dan itu terjadi pada nilai Q=2 karena memiliki error yang lebih kecil dari nilai Q=1.
Jika dilihat dari respon time pada variasi nilai Q ini maka pada Q=2 didapatkan nilai overshoot yang lebih rendah dari nilai Q=1. Agak sulit menentukan nilai respon yang lain dikarenakan gambar grafik yang kurang begitu baik. Hal ini disebabkan karena jumlah lubang pada rotary encoder yang hanya maksimal 40 lubang dan jika di sampling dengan waktu 10milisecond maka akan terbaca antara 13-14 lubang namun lebih dominan pada jumlah 13 lubang. Semakin banyak lubang yang dimiliki piringan rotary maka semakin detail dan rinci pula pembacaan sensor kecepatan.
Dari semua pengujian pada implementasi control optimal Linear Quadratic Regulator ini telah dilakukan, sesuai dengan tujuan dan batasan masalah yang ditentukan dengan melihat jumlah dominan keberhasilan maka bisa dikatakan bahwa metode Linear Quadratic Regulator telah dapat diimplementasikan kedalam mikrokontroller dan mampu mengontrol kecepatan motor dc.
Dengan pembanding PID
Jika dibandingkan dengan controller PID maka secara teori dengan simulasi pada matlab maka akan Nampak bahwa metode LQR ini jauh lebih baik dari metode PID karena memiliki respon yang lebih cepat dalam mencapai setpoint yang ditentukan. Dimana untuk menentukan nilai Kp, Ki dan Kd dengan menggunakan pendekatan metode Zigler Nichols seperti yang ditunjukkan pada buku ogata.
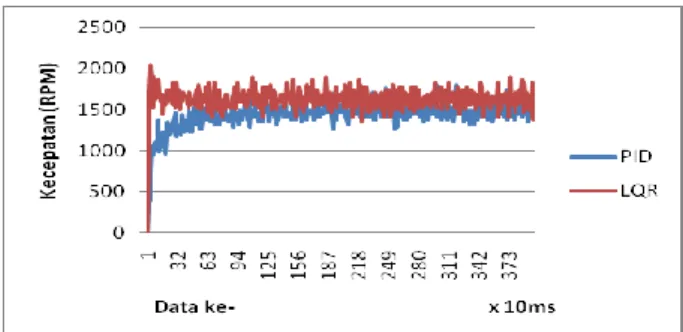
Berikut adalah grafik pengujian respon transien perbandingan antara PID dan LQR dengan setpoint 1500 rpm:
Gambar 4.21. Grafik respon antara PID dan LQR
Dapat diamati bahwa dalam pengujian ini respon LQR lebih baik dari pada respon PID. Pada PID sedikit lambat untuk mencapai setpoint yang ditentukan, selisihnya adalah 63x10ms=0.63 detik. Jika dilihat error dari set point maka bisa dilihat pada tabel 4.7.
Tabel 4.4. %Error setpoint antara PID dan LQR Kontroller %Error
PID 4.2
LQR 8.5
Dalam hal ketepatan pencapaian nilai setpoint dengan nilai error sebesar 4.2 % bisa dikatakan PID memang lebih baik namun dalam respon time maka PID jauh tertinggal dari LQR dengan selisih 0.6 detik.
Pada pengujian ini membuktikan bahwa dalam hal-hal tertentu dengan nilai-nilai tertentu maka LQR jauh lebih baik dari PID dalam hal respon time karena responnya yang cepat dalam mencapai setpoint namun error yang dihasilkan lebih besar dibandingkan PID.
Secara keseluruhan dari semua pengujian mulai dari variasi nilai kecepatan, variasi nilai Q dan perbandingan dengan controller PID maka LQR bisa dikatakan mampu diimplementasikan kedalam mikrokontroler serta LQR mampu mengontrol kecepatan motor DC.
V. KESIMPULAN
Dari pengujian dan analisis yang telah dilakukan maka dapat diambil beberapa kesimpulan yaitu
1. Kontol Optimal Linear Quadratic Regulator dapat diimplementasikan dalam mikrokontroller
2. Kontrol Optimal Linear Quadratic Regulator mampu mengontrol kecepatan motor DC. 3. Nilai optimal Q pada controller LQR
berdasarkan pengujian pada nilai Q=2 4. Respon LQR lebih baik dari controller PID 5. Semakin banyak jumlah lubang pada piringan
rotary maka semakin baik dan detail pembacaan sensor kecepatannya.
VI. DAFTAR PUSTAKA
1. Ogata, Katsuhiko . Modern Control Engineering Third Edition. University of Minnesota
2. Basuki Arief. Pengaturan Kecepatan Motor Dc Secara Real Time Menggunakan Teknik Kontrol Optimal Linear Quadratic Regulator (LQR). Teknik Elektro UNDIP, Semarang 3. Kendali 3
4. http://deltaelectronic.com/article/wpcontent/upl oads/2008/09/an0082.pdf
5. Andrianto, Heri. 2008. Pemrograman Mikrokontroler AVR ATmega16. Informatika Bandung