DETEKSI TABRAKAN DALAM DUNIA VIRTUAL MENGGUNAKAN
METODE SPHERE-PLANE DETECTION
Akuwan Saleh1, Mochamad Hariadi2
1,2Pasca Sarjana, Jurusan Teknik Elektro, Fakultas Teknik Industri Institut Teknologi Sepuluh Nopember, Surabaya
E-mail: [email protected], [email protected]
Abstrak
Salah satu cara untuk mendeteksi tabrakan dalam dunia virtual 3D adalah dengan menggunakan metode Sphere-Plane Detection (SPD). Metode SPD relatif mudah untuk melakukan proses perhitungan karena sphere/bola merupakan objek simetri. Seluruh permukaan pada sebuah bola adalah mempunyai jarak yang sama dari titik pusat, sehingga mudah untuk menentukan apakah sebuah objek memiliki perpotongan dengan bola. Jika jarak dari pusat bola ke sebuah obyek kurang dari atau sama dengan jari-jari bola, maka tabrakan telah terjadi. Dalam penelitian ini objek dinamis pada dunia virtual akan diberi sensor dalam bentuk sphere menggunakan node SphereCollisionSensor dengan radius tertentu, kemudian di simulasikan apakah terjadi tabrakan ketika sebuah objek mendapat halangan objek lain. Untuk menentukan jarak dilakukan perhitungan berdasarkan data pengukuran posisi koordinat kedua objek. Hasil yang diperoleh salah satunya adalah jarak bernilai negatip ketika bola melewati plane.
Kata kunci : deteksi tabrakan, sphere-plane detection, spherecollisionsensor.
1. Pendahuluan
Deteksi tabrakan merupakan bagian penting dalam game 3D. Ini memastikan bahwa permainan dengan dasar fisika relatif lebih realistis, sehingga objek tidak terpotong ketika melalui benda lainnya atau melayang ketika harus jatuh. Seberapa baik permainan dapat mendeteksi tabrakan merupakan bagian integral dari believability dalam menikmati sebuah permainan. Sebuah sistem pendeteksian benturan/tabrakan di implementasikan dengan buruk dapat menjadi kelemahan untuk sebuah produk, sedangkan implementasi yang sangat baik dapat menghasilkan hasil yang luar biasa.
Dua bagian utama dalam tabrakan adalah mendeteksi apakah telah terjadi tabrakan atau tidak. Dengan demikian, menanggapi tabrakan dan menemukan jika tabrakan telah terjadi adalah dasar dari masalah ini.
Pada penelitian ini objek yang berada dalam dunia virtual yang dibuat dengan VRML (Virtual Reality Modeling Language) adalah standar internasional untuk menggambarkan bentuk 3-D dengan pemandangan di World Wide Web Nadeau, et al (2003). Dilengkapi dengan sensor, salah satunya adalah bentuk sphere dengan radius tertentu, sehingga dapat menginformasikan apakah objek lain berada dalam jarak jangkau sensor atau tidak, jika jaraknya sama dengan jangkauan sensor maka objek akan menghindari tabrakan
Dengan menyatukan objek-objek dinamis dalam node group collision yang sudah tersedia pada program virtual menghasilkan penghindaran terjadinya tabrakan antar objek dinamis. Penerapan metode representasi berbagai shape dalam pemodelan 3D untuk animasi komputer, seperti misalnya di VRML, perlu adanya algoritma deteksi tabrakan yang dapat diterapkan pada koleksi benda yang terdiri dari beragam jenis shape Bergen (1999). Metode SPD sebagai algoritma deteksi tabrakan pada penelitian ini akan disimulasikan, dan hasilnya di implementasikan dalam animasi 3D yang disertai kontrol perilaku dari setiap character dengan menggunakan kecerdasan buatan (mental state) pada penelitian berikutnya.
2. Deteksi Tabrakan 2.1 Konsep Dasar
Sebuah vektor pada dasarnya adalah segmen garis terarah yang memiliki arah dan besaran. Dengan grafis, hal ini dapat diterjemahkan sebagai sudut dan panjang atau jarak. Tetapi besarnya juga dapat merupakan faktor-faktor lain seperti kekuatan atau kecepatan objek PIGE (2003).
Sebuah vektor V dapat direpresentasikan sebagai perbedaan dari dua titik P1dan P2persamaan (1-1), perbedaan komponen dua poin persamaan (1-2), atau dengan komponen vektor konstituen persamaan
(1-dan y, se(1-dangkan dunia 3D menambahkan sumbu z dan komponen lain untuk masing-masing vektor. Gambar 1 memberikan representasi visual dari persamaan pada plane Cartesian.
1 2 VP P (1-1)
)
1
2
,
1
2
(
V
x
x
y
y
(1-2) ) , ( V Vx Vy (1-3)Gambar 1. Representasi Vektor.
Vektor memainkan peran penting dalam tabrakan dengan menentukan seberapa jauh objek satu sama lain. Besarnya atau panjang vektor dapat ditemukan dengan mengambil akar kuadrat dari jumlah kuadrat masing-masing komponen vektor itu. Vector 2D: ) 2 2 ( | V | Vx Vy (1-4) Vektor 3D: ) 2 2 2 ( | V | Vx Vy Vz (1-5)
Untuk menormalkan vektor, masing-masing komponen vektor dibagi dengan besarnya vektor. Ketika semua komponen vektor ditambahkan bersama-sama, mereka akan sama dengan 1. Sebuah normal plane adalah penting untuk memberikan pencahayaan yang realistis dan deteksi tabrakan.
| | Vx V Vx ; | | Vy V Vy ; | | Vz V Vz 1 Vy Vz Vx (1-6) Persamaan Planar : Ax ByCzD0 (1-7)
Gambar 2. Plane Normal.
Plane didefinisikan oleh tiga poin non-collinear. (x, y, z) dari persamaan planar adalah koordinat titik di plane, dan koefisien A, B, C, dan D adalah konstanta yang menggambarkan sifat ruang dari plane. A, B, dan C juga dapat merupakan vektor (a, b, c) yang merupakan plane normal PIGE (2003).
2.2 Metode Sphere-Plane Detection
Salah satu cara untuk mendeteksi tabrakan dalam dunia virtual 3D adalah dengan menggunakan metode Sphere-Plane Detection (SPD) PIGE (2003). Pada gambar 3. merupakan metode SPD untuk menentukan apakah sebuah objek memiliki perpotongan dengan bola. Jika jarak dari pusat bola ke sebuah obyek (d) kurang dari atau sama dengan jari-jari bola (r), maka tabrakan telah terjadi.
Titik utamanya adalah untuk tidak membiarkan bola terlalu dekat dengan plane. Sebelum melakukannya, setiap plane harus memiliki vektor normal sendiri dan nilai D, yang diambil dari persamaan planar (1-7). Jarak antara titik, yang merupakan titik pusat bola dalam kasus ini, dan plane dihitung dengan mengambil dot product posisi normal dan lingkup plane itu.
jarak sphere.position plane.normal
(1-8)
Gambar 3. Metode Sphere-Plane Detection. Algoritma dari metode di atas ditunjukkan pada gambar berikut:
Start
- Posisi Sphere, radius (r1) - Posisi Plane (Box)
Ukur jarak antar objek (d) d ≤ 50 d > r1 d = r1 Tidak ada tabrakan d < r1 End t y t t y y y Hitung: n, P0dan Jarak (d) =n.c+D t Terjadi tabrakan Tabrakan/ Tembus Plane
Gambar 4. Flowchart Sistem.
Berdasarkan gambar 4, nilai jarak dapat berupa positif atau negatif. Jika jarak menjadi nol, maka bola adalah memotong plane, yang umumnya bukan efek yang diinginkan ketika mendeteksi tabrakan. Sebuah program permainan pertama akan memeriksa apakah tabrakan akan terjadi ketika objek bergerak ke arah yang diinginkan. Jika ada tabrakan, maka program akan merespon dengan tepat, seperti menolak untuk bergerak ke arah yang diinginkan PIGE (2003).
2.3 Interface Deteksi Tabrakan Antar Objek Deteksi benturan/tabrakan antar objek dalam sebuah scene tiga dimensi merupakan prosedur untuk menentukan apakah suatu objek memiliki bentuk tertentu, selain itu untuk menjalankan beberapa transformasi sebagai respon misalnya, untuk pindah, putar, atau skala. Dalam dokumen ini digambarkan interface pendeteksian benturan antar obyek VRML.
Interface dibangun dengan dua objek yaitu collidee dan collision. Pertama bertindak sebagai proxy untuk perubahan shape, dengan parameter matrik transformasi, dan yang terakhir menggambarkan titik dari shape yang terjadi ketika kontak dengan shape lain, dalam kasus tabrakan Parallel Graphics (2011). Contoh sintaknya sebagai berikut:
Object Collidee Properties:SFNode/MFNode body SFVec3f position SFRotation orientation SFVec3f scale SFVec3f size SFVec3f offset Collision collision Collidee scenery SFNode/MFNode ignore Collision
Referensi properti collision sebuah objek yang menggambarkan titik kontak shape selama tumbukan terakhir. Object Collision Properties:SFVec3f point SFVec3f normal Number faceIndex MFNode path
point and normal
Properti ini berisi titik koordinat, relatif terhadap koordinat lokal dari kerangka shape, titik yang kontak dengan penghalang tersebut dan properti normal memberikan koordinat dari vektor normal pada titik tersebut.
path
Properti path adalah daftar node yang membentuk sebuah rantai dalam hirarki node mulai dari yang ditetapkan dalam properti collidee body, dan berakhir dengan node yang berisi face yang
3. Simulasi Deteksi Tabrakan
VRML 2,0 menerapkan sebuah model sederhana untuk deteksi tabrakan. Semua objek dengan default di dunia virtual sebagai collidable, tabrakan yang diuji adalah antara user avatar dan objek lainnya dalam scene. Kenyataan bahwa benda selain avatar tidak berinteraksi satu sama lain sebagai keterbatasan yang cukup kolosal dalam penggunaan node collision Badawy & Kelash (2003).
3.1 Deteksi Tabrakan Menggunakan Sensor Sphere
Objek dalam dunia virtual dengan shape bola sebagai subjek dan shape kotak sebagai hambatan dengan node sphere collision sensor sebagai berikut.
EXTERNPROTO BSphereCollisionSensor [ eventIn SFTime updateRequest
field SFNode subject field SFNode obstacleRoot field SFFloat maxDist
eventOut MFInt32 collisionIndex_changed eventOut SFTime collideTime
]
BsphereCollisionSensor: memberitahukan adanya tabrakan antara subjek dan hambatan (tidak mendeteksi tabrakan antara hambatan). Node subjek dan hambatan harus memiliki kedua posisi exposedField SFVec3f dan bSphereRadius SFFloat exposedField, yang sesuai dengan pergerakan mereka saat ini, dengan titik pusat bola dan jari-jari. Pada gambar 5. Tu & Terzopoulos (2009) seekor ikan dengan sensor sphere.
Gambar 5. Sensor Sphere Pada Ikan
maxDist SFFloat 100: jarak maksimum yang mungkin terjadi antara subjek dan setiap hambatan yang diberikan. maxDist untuk membagi ruang di sekitar subjek, mengurangi jumlah perbandingan yang harus dibuat untuk setiap permintaan update dengan mengabaikan hambatan yang mungkin terlalu jauh.
collisionIndex_changed MFInt32: indeks dari hambatan jika ada tabrakan dengan subjek. Nilai akan sesuai dengan posisi sebuah hambatan dalam array children obstacleRoot's. Jika tidak ada
tabrakan terjadi, collisionIndex_changed akan memiliki panjang 0.
collideTime SFTime: timestamp yang terkait pada saat terjadi tabrakan.
Masukan berupa data setting time dan indeks saat terjadi tabrakan antara subjek dan hambatan dengan perintah eventIn SFTime set_collideTime dan eventIn MFInt32 set_colIndex didapatkan hasil dari simulasi seperti diperlihatkan pada gambar 6.
Gambar 6(a). Tabrakan Bola Vs Kotak
Gambar 6(b). Pengukuran jarak ketika tabrakan
Gambar 6. Tabrakan Antar Objek
Pada gambar 6(a). tabrakan objek menghasilkan
respon perubahan warna bola. Sedangkan pada gambar 6(b). simulasi untuk jarak d kurang dari jari-jari dan sama dengan jari-jari-jari-jari bola r. Hasil pengukuran koordinat ketika terjadi tabrakan ditunjukan pada tabel berikut:
Tabel 1. Posisi Tabrakan Bola Vs Kotak
Hasil pengukuran koordinat tabrakan ikan Vs makanan/bola ditunjukan pada tabel-2.
Tabel 2. Posisi Tabrakan Ikan Vs Makanan
Simulasi tabrakan ikan Vs makanan/bola diperlihatkan pada gambar 7.
Gambar 7. Tabrakan Bola Vs Ikan
3.2 Deteksi Penghindaran Tabrakan Antar Objek
Proses penghindaran tabrakan antar objek dalam simulasi ini menggunakan metode repulsion/tolakan jika objek-objek yaitu ikan dan hambatan berbentuk bola saling berdekatan. Node yang digunakan adalah node AvoidObstacles dengan sintak pada script dalam simulasi sebagai berikut. AvoidObstacles
EXTERNPROTO AvoidObstacles [ eventIn SFTime updateRequest eventIn SFVec3f set_goal eventIn SFString set_state eventIn MFNode set_obstacles field SFVec3f goal
field SFFloat goalPriority field SFFloat speed field SFString state field MFNode obstacles exposedField SFVec3f position exposedField MFNode children ]
Hasil simulasi dan pengukuran kordinatnya ditunjukan pada gambar 8 dan tabel 3.
Gambar 8. Penghindaran Tabrakan Antar Objek Pada tabel 3. Ikan yang semula posisinya sama dengan posisi goal (persegi) mulai bergerak menghindari tabrakan ketika hambatan bergerak menuju ke arahnya.
Tabel 3. Posisi Ikan Mulai Bergerak Menghindar
No XPosisi BolaY Z XPosisi KotakY Z
1 0.56. 0 0 1.1 0 0 2 0.75 0 0 0.62 0 0 3 0.71 0 0 0.73 0 0 4 0.78 0 0 0.55 0 0 5 0.68 0 0 0.81 0 0 6 0.71 0 0 0.71 0 0 7 0.68 0 0 0.79 0 0 8 0.72 0 0 0.69 0 0 9 0.61 0 0 0.97 0 0 10 0.78 0 0 0.55 0 0 Rata-rata 0.7133 0 0 0.757 0 0
No Posisi MakananX Y Z X Posisi IkanY Z
1 4.22 0 0 8.77 1.4 -13.55 2 4.23 0 0 8.57 1.4 -13.51 3 4.24 0 0 8.62 1.4 -13.52 4 4.23 0 0 8.61 1.4 -13.52 5 4.23 0 0 8.53 1.4 -13.51 6 4.22 0 0 8.67 1.4 -13.53 7 4.23 0 0 8.57 1.4 -13.51 8 4.23 0 0 8.55 1.4 -13.51 9 4.23 0 0 8.58 1.4 -13.52 10 4.23 0 0 8.58 1.4 -13.52 Rata-rata 4.229 0 0 8.605 1.4 -13.52
( -0.63, 0, 0 ) ( 4.08, 0, 0 ) ( 0.71, 0, 0 )
Tabel 4. Posisi Terjadinya Gerakan Avoidance 4. Analisa
4.1 Deteksi Tabrakan Kotak Vs Bola
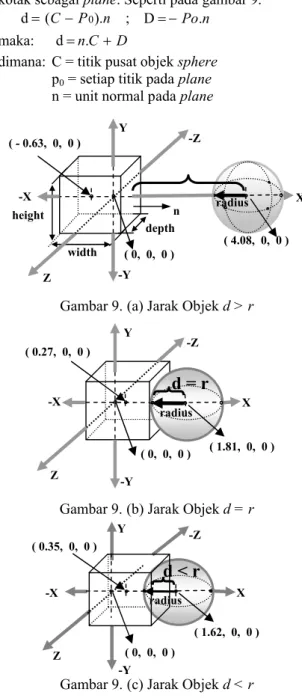
Pada simulasi gambar 6(a). dari kedua posisi objek tersebut dapat di hitung nilai d yaitu jarak antara titik pusat objek bola dan permukaan kotak sebagai plane. Seperti pada gambar 9.
n P C ). ( d 0 ; DPo.n maka: dn.C D
dimana: C = titik pusat objek sphere p0= setiap titik pada plane n = unit normal pada plane
Gambar 9. (a) Jarak Objek d > r
Gambar 9. (b) Jarak Objek d = r
Gambar 9. (c) Jarak Objek d < r
Gambar 9. (d) Jarak Objek d <-r Gambar 9. Jarak Kotak dan Bola
Dalam program geometry Sphere { radius .8 } dan geometry Box { size 1.5 1.5 1.5 }, maka sisi kanan kotak (plane) p0 = 0.12, posisi n =(0.12, 0 ,0 ). Persamaan plane dari persamaan (1-7) adalah 0.12+D= 0, maka D = -0.12. Unit vektor n adalah:
1 2 ) 12 . 0 ( ) 12 . 0 ( 2 2 2 ) , , ( || || n C B A C B A N N
Jarak kotak dengan bola pada gambar 9.(a) adalah 96 . 3 12 . 0 08 . 4
d atau d > r. Dengan cara yang sama jarak kotak dengan bola pada gambar 9.(b) adalah d1.8110.81 atau d = r. Jarak kotak dengan bola pada gambar 9.(c) adalah
52 . 0 1 . 1 62 . 1
d atau d < r. Sedangkan Jarak kotak dengan bola pada gambar 9.(d) adalah
75 . 0 46 . 1 71 . 0 d atau d < -r.
4.2 Deteksi Tabrakan Bola/Makanan Vs Ikan
Pada simulasi gambar 7. posisi makanan/bola dengan r1 pada program geometry Sphere { radius .1 } sebelum bertabrakan dengan sensor berbentuk bola pada mulut ikan berada pada sumbu X, Y, dan Z adalah ( 2.41, 0, 0 ), posisi ikan sumbu X, Y, dan Z yaitu ( 7.59, 1.4, -14.64 ), dan posisi sensor dengan radius pada program bSphereRadius .5 berada pada koordinat (3.29, 0, 0) diperlihatkan pada gambar di bawah ini.
No Posisi HambatanX Y Z XPosisi Ikan/GoalY Z
1 1.04 0 7 -7.96 0 7.17 2 0.97 0 7 -7.96 0 7.17 3 1.05 0 7 -7.96 0 7.17 4 0.92 0 7 -7.96 0 7.17 5 1 0 7 -7.96 0 7.17 6 1.19 0 7 -7.96 0 7.17 7 0.97 0 7 -7.96 0 7.17 8 1.18 0 7 -7.96 0 7.17 9 1.07 0 7 -7.96 0 7.17 10 0.93 0 7 -7.96 0 7.17 Rata-rata 1.032 0 7 -7.96 0 7.17
No Posisi HambatanX Y Z XPosisi Ikan/GoalY Z
1 -3.14 0 7 -5.28 0 4.07 2 -2.15 0 7 -5.28 0 7 3 -2.84 0 7 -5.28 0 9.98 height ( - 0.63, 0, 0 ) -X Y X Z depth radius width ( 4.08, 0, 0 ) -Z -Y ( 0, 0, 0 ) n Y Z ( 0.27, 0, 0 ) -Z -X -Y ( 0, 0, 0 ) ( 1.81, 0, 0 ) X radius
d = r
Y Z ( 0.35, 0, 0 ) -Z -Y ( 0, 0, 0 ) ( 1.62, 0, 0 ) X radiusd < r
-X Y Z Titik pusat kubus( 0.71, 0, 0 )
-Z
-Y ( 0, 0, 0 )
Titik pusat bola ( 0.71, 0, 0 )
X radius
d < -r
-XGambar 10. (a) Posisi Bola dan Sensor Ikan Gambar 10. (b) Bola dan Sensor Dalam 1 Posisi
Gambar 10. Ikan dan Bola/Makanan
Untuk menentukan jarak d menggunakan sphere-sphere detection. Persamaan yang digunakan: 2 2 2 ( . ) ( . ) ) . ( d Dx D y Dz ; D(C2C1) Sehingga nilai d pada gambar 10(a) adalah:
0.88 ) 41 . 2 29 . 3 ( D ;r1r20.10.50.6 8952 . 2 ) 29 . 3 88 . 0 ( d x 2 » d > (r1+r2).
Dengan cara yang sama jarak pada gambar 10(b) adalah: d (0x4.23)2 0 » d < (r1+r2).
Respon tabrakan dari gambar 10. bola akan remove ketika terjadi tabrakan dengan mulut ikan. Sesuai sintak pada program.
"vrmlscript:
function remove_it(value) { ……
} "
4.3 Penghindaran Tabrakan Ikan dan Hambatan/Bola
Pada simulasi gambar 8. posisi hambatan bentuk bola bergerak kekanan dan kekiri berarti nilai sumbu X selalu berubah sedangkan sumbu Y dan Z konstan 0 dan 7. Pada tabel 3, nilai rata-rata dari koordinat X, Y dan Z adalah 1.032, 0, 7. Objek hambatan/bola pada posisi ini mengakibatkan ikan mulai bergerak menghindar dengan cara seperti ditunjukan pada gambar 11.
Gambar 11. Model gerakan evoidence
Ketika Goal dan ikan pada posisi 1 dengan koordinat (-5.28, 0, 4.07) ikan bergerak menghindar berputar menjauh menuju ke arah sumbu -Z, hal ini disebabkan oleh posisi goal dan ikan yang berada pada posisi sumbu Z=4.07 nilai ini kurang dari sumbu Z hambatan= 7 (Zgoal/ikan < Zhambatan). Posisi hambatan pada saat itu yaitu (-3.14, 0 7), sehingga repulsion/tolakan dari hambatan mendorong ke arah –Z. Pada posisi 2 goal dan ikan dengan koordinat (-5.28, 0, 7), ikan bergerak menghindar menuju kearah sumbu –X karena nilai sumbu Z goal/ikan sama dengan sumbu Z hambatan (Zgoal/ikan = Zhambatan). Sehingga repulsion dari hambatan mendorong ke arah sumbu –X atau ke X (untuk posisi goal & ikan di sebelah kanan hambatan) kemudian ke arah –Z atau Z. Pada posisi goal dan ikan ke 3 dengan koordinat (-5.28, 0, 9.98), ikan bergerak menghindar berputar ke arah sumbu +Z, karena nilai sumbu Z goal/ikan lebih dari sumbu Z hambatan (Zgoal/ikan>
Zhambatan). Sehingga repulsion dari hambatan mendorong ke arah sumbu Z
positip.
5. Kesimpulan
Dari hasil simulasi dan analisa data di atas dapat ditarik kesimpulan bahwa :
1. Jarak d bernilai negatip (d < -r), jika objek bola telah melewati plane pada posisi bola x = 0.71. 2. Fungsi remove pada script vrml akan berfungsi
menghilangkan objek makanan ketika jarak d < r1+r2 dengan posisi makanan rata-rata x = 4.229. 3. Terjadinya 3 model gerakan avoidance adalah.
a. Gerakan kearah sumbu –Z, jika nilai Zgoal/ikan < Zhambatan.
b. Gerakan kearah horisontal kemudian ke arah –Z atau Z, jika nilai Zgoal/ikan= Zhambatan.
c. Gerakan kearah sumbu Z, jika nilai Zgoal/ikan > Zhambatan.
Daftar Pustaka:
Bergen Gino van den .(1999): Collision Detection in Interactive 3D Computer Animation, Eindhoven University of Technology, University Press Facilities - Eindhoven.
Badawy W. A. & Kelash H. M, (2003): Collision Detection In VRML: a Survey, Emirates Journal for Engineering Research, 8 (2), 1-8.
Nadeau David R, Moreland John L.& Heck Michael M, (1998): Introduction to VRML 97 -Lecturers, University of California at San Diego.
PIGE, (2011): Collision Detection, at http://www.edenwaith.com/products/ pige/tutorials/collision.php. Y -Z -Y Z -X r r X Sensor C2 ( 3.29, 0, 0 ) Bola C1 ( 2.41, 0, 0 ) d > (r1 + r2