SEMINAR NASIONAL
XVI
Kampus ITENAS
Ba ndung , 6 Des emb er 20 17
Se m in a r
Te k n ik
M E S I N
Seminar Nasional – XII ISSN 1693-3168
Rekayasa dan Aplikasi Teknik Mesin di Industri Kampus ITENAS – Bandung, 6 Desember 2017
TSKP - 14 Teknik
MESIN
Sistem Akuisisi Data Nirkabel Untuk Pengujian Dinamika Kendaraan Skala Kecil
Rusman dan Mochamad Safarudin
Jurusan Teknik Mesin , Sekolah Tinggi Teknologi Mandala Bandung J1. Soekarno Hatta No.597 Bandung 40284
e-mail :rusman_st_mandala@yahoo.com e-mail : mochsafarudin@gmail.com
Abstrak
Studi dinamika kendaraan memerlukan kendaraan skala sebenarnya dengan dilengkapi instrumen pengukur yang dapat diandalkan untuk melakukan verifikasi dan validasi model matematika sehingga untuk membuatnya memerlukan biaya yang cukup tinggi dan sistem yang sangat kompleks. Lebih dari itu, pengujian kendaraan skala sebenarnya sangat rawan terhadap kecelakaan jika dilakukan di jalan sesungguhnya. Makalah ini membahas kendaraan skala kecil kendali jauh yang dilengkapi intrumen pengujian dengan sistem akuisisi data berbasis mikrokontroler secara nirkabel. Model dinamika kendaraan skala kecil tersebut dibuat dengan asumsi ekivalen dengan dinamika kendaraan skala sebenarnya. Beberapa jenis standar pengujian dilakukan untuk melakukan verifikasi model matematika dan beberapa parameter disesuaikan berdasarkan hasil pengujian. Ketepatan pemodelan dengan kendaraan skala kecil dibahas dalam makalah ini.
Kata kunci: dinamika kendaraan, kendaraan skala kecil, sistem akuisisi data, model dinamika
1. Pendahuluan
Pemodelan dinamik sebuah kendaraan otonom sangat diperlukan untuk mengetahui response kendaraan terhadap input yang diberikan oleh sistem kemudi maupun terhadap input dari luar misalnya angin dan ketidakrataan jalan maupun untuk merancang sistem kontrol agar kendaraan dapat mempunyai karakteristik seperti yang diinginkan. Model dinamik kendaraan tersebut harus divalidasi dengan pengujian pada kendaraan sebenarnya sehingga bisa dilakukan penyesuaian parameter-parameter yang mempengaruhi perilaku respons kendaraan tersebut. Pengujian dengan menggunakan kendaraan skala penuh memerlukan biaya yang tidak sedikit sehingga hal ini dapat menjadi kendala dalam proses validasi model dinamik kendaraan tersebut. Untuk itu diperlukan sebuah model skala kecil yang dilengkapi sistem akuisisi data berbasis nirkabel sehingga pengukuran dapat dilakukan secara real time. Dalam paper ini akan dibahas penerapan sistem akuisisi data berbasis mikrokontroler untuk validasi model dinamik kendaraan skala kecil. Model dinamik kendaraan skala kecil tersebut diharapkan dapat mewakili model dinamik kendaraan sebenarnya dalam skala penuh.
Penelitian sebelumnya telah dilakukan dengan input berupa sudut kemudi roda depan dan kecepatan putar roda penggerak belakang (Lukowski & Ravikumar, 1993). Keluaran dari respons kendaraan adalah berupa kecepatan kendaraan di pusat massanya, sudut selip badan mobil dan laju gerak yaw kendaraan pada bidang x-y (Macek et al, 2007). Penggunaan kendaraan skala kecil untuk pengujian sifat dinamik telah dilakukan juga Brenan et al, 1999 dengan menggunakan permukaan treadmill untuk mensimulasikan permukaan jalan. Kendaraan dengan skala 1:5 digunakan dengan kamera untuk mengukur posisi dan orientasinya (Van Maren & Sika, 2011) dan skala 1:10 untuk mengukur posisi dalam bidang x-y (Hoblet, 2003). Akan tetapi, belum ada yang menggunakan kendaraan skala kecil dengan permukaan jalan yang sebenarnya dan pengiriman data-data sensor kelakuan kendaraan dilakukan secara nirkabel.
Dalam paper ini, dilakukan pemodelan dinamik kendaraan dalam 3 derajat kebebasan yaitu laju yaw, percepatan lateral dan kecepatan guling. Sebuah kendaraan kendali jauh skala kecil digunakan sebagai platform pengujian untuk memvalidasi model dinamik tersebut. Sensor-sensor berteknologi Micro Electro
Mechanical System (MEMS) digunakan untuk menghemat biaya. Sistem akusisi data berbasis mikrokontroler
Seminar Nasional – XII ISSN 1693-3168
Rekayasa dan Aplikasi Teknik Mesin di Industri Kampus ITENAS – Bandung, 6 Desember 2017
TSKP - 17 Teknik
MESIN
(ii) Sudut kemudi kiri dan kanan sama (iii)Sudut slip kiri dan kanan dari roda sama (iv)Gesekan dan gaya angin diabaikan (v) Sistem adalah linier.
2.2 Model Simulasi
Dari persamaan-persamaan di atas, model Simulink dibuat. Persamaan akhir dari respon transien yaitu persamaan (12) dan (13), digunakan dalam pembuatan model Simulink yang secara skematik ditunjukkan di Gambar 2-3.
Gambar 2-3 Model dinamik 3 derajat kebebasan
Input yang diberikan pada model Simulink adalah sudut kemudi sebesar 300 pada kecepatan longitudinal 50 km/jam dan input perubahan jalur ganda pada kecepatan 30 km/jam menurut standar ISO 3888.
2.3 Parameter Kendaraan Skala Kecil
Pada model dinamik ini, parameter yang digunakan adalah berdasarkan model kendaraan skala kecil yang digunakan. Tabel 2.1 mentabulasikan parameter-parameter yang digunakan dalam simulasi model dinamik tersebut.
Tabel 2. 1 Parameter yang digunakan pada simulasi
Parameter Transien Nilai
Massa kendaraan, m(kg) 9.31kg Kekakuan belok roda depan,
Momen inersia terhadap sumbu z, Iz
0.8310
Seminar Nasional – XII ISSN 1693-3168 Rekayasa dan Aplikasi Teknik Mesin di Industri
Kampus ITENAS – Bandung, 6 Desember 2017
TSKP - 18 Teknik
MESIN
Sudut kemudi, δf (degree) 30º
Kecepatan longitudinal Vx untuk kedua simulasi tersebut berbeda. Untuk pengujian kemudi fungsi
step digunakan kecepatan sebesar 50 km/jam dan untuk pengujian perubahan jalur ganda digunakan kecepatan sebesar 30 km/jam.
2. Verifikasi dan Validasi Model Dinamika Kendaraan
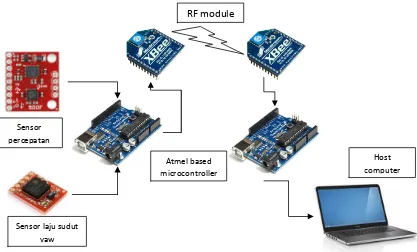
Hasil simulasi dari model dinamik kendaraan skala kecil tersebut diverifikasi dan divalidasi dengan melakukan ekperimen pada sebuah kendaraan kendali jauh skala kecil (1:5). Kendaraan tersebut dilengkapi dengan instrumen untuk mengukur kecepatan dan laju sudut yaw berbasis Micro Electro Mechanical System (MEMS). Sensor-sensor tersebut diletakkan di posisi titik massa dari kendaraan. Keluaran sensor berupa tegangan listrik yang proporsional dengan kecepatan serta laju sudut yaw diproses oleh mikrokontroler Atmel dalam bentuk development board Arduino. Hasil tersebut kemudian ditransmisikan oleh modul frekuensi radio berbasis X-bee ke host computer untuk penyimpanan/pengolahan data. Diagram skematik sistem akuisisi data nirkabel tersebut disajikan di Gambar 3.1.
Gambar 3-1 Diagram skematik sistem akuisisi data nirkabel
3. Hasil Simulasi dan Pengujian
Output dari hasil pengujian adalah percepatan lateral dan laju yaw. Karena data hasil pengujian mengandung noise, maka diperlukan penyaringan data (filtering).
a. Pengujian Kemudi Fungsi Step
Hasil pengujian dan simulasi untuk input kemudi fungsi step ditampilkan di Gambar 4.1 dan Gambar 4.2. Hasil ini juga dibandingkan dengan hasil dari perangkat lunak CarSimEd yang telah tervalidasi.
Seminar Nasional – XII ISSN 1693-3168 Rekayasa dan Aplikasi Teknik Mesin di Industri
Kampus ITENAS – Bandung, 6 Desember 2017
TSKP - 20 Teknik
MESIN
beberapa parameter model seperti kekakuan belok di roda depan dan roda belakang harus dilakukan untuk memperoleh hasil yang lebih tepat. Sistem akuisisi data nirkabel berbasis mikrokontroler cukup dapat diandalkan untuk digunakan dalam experimen verifikasi/validasi. Simulasi dan hasil pengujian juga telah dibandingkan dengan perangkat lunak CarSimEd dan menunjukkan kecenderungan dan hasil yang cukup tepat. Akan tetapi beberapa perbedaan hasil dari simulasi dengan hasil pengujian harus diteliti lebih lanjut untuk memperoleh hasil yang lebih tepat dan teliti.
Daftar Pustaka
[1] Hoblet, Phillip C. “Scale-Model Vehicle Analysis for the Design of a Steering Controller”, Trident Scholar Project R eport No. 309, US Naval Academy Annopolis , 2003
[2] Lukowski, S.A and P.B. Ravikumar. “Computer Simulation Study of Vehicle Handling Improvement by Active Steering of Rear Wheels.” Proceedings of Summer Computer Simulation Conference, University of Wisconsin, July ,1993. Lukowski, S. A. and
[4] Maček, Kristijan, Konrad Thoma, Richard Glatzel, and Roland Siegwart.“Dynamics Modeling and
Parameter Identification for Autonomous Vehicle Navigation.” Proceedings of IEEE/RSJ International Conference on Intelligent Robots and System, San Diego, CA, USA, October 29 – November 2, 2007. [5] Van Maren, C.L.A., and Jiri Sika, “Scaled Vehicle Dynamics of DAVINCI Project”, Delft University of
Technology , unpublished, 2001
S e m in a r
Te k n ik
M E S I N