BAB II
TINJAUAN PUSTAKA
2. 1 Teori Tekuk 2. 1. 1 Latar Belakang
Kolom merupakan batang tekan tegak yang bekerja untuk menahan balok
balok loteng, rangka atap, lintasan crane dalam bangunan pabrik dan sebagainya
yang untuk seterusnya akan melimpahkan semua beban tersebut ke pondasi.
Dengan berbagai macam sebutan, seperti kolom, tiang, tonggak, dan
batang desak, batang ini pada hakekatnya jarang sekali mengalami tekanan aksial
saja. Apabila sebuah batang lurus dibebani gaya tekan aksial dengan pemberian
beban semakin lama semakin tinggi, maka pada batang tersebut akan mengalami
perubahan. Perubahan dari keadaan sumbu batang lurus menjadi sumbu batang
melengkung dinamakan tekuk.
Pada hakekatnya batang yang hanya memikul tekan aksial saja jarang
dijumpai dalam struktur namun bila pembebanan diatur sedemikian rupa hingga
pengekangan (restrain) rotasi ujung dapat diabaikan atau beban dari batang
batang yang bertemu diujung kolom bersifat simetris dan pengaruh lentur sangat
kecil dibandingkan dengan tekanan langsung maka batang tekan dapat
direncanakan dengan aman sebagai kolom yang dibebani secara konsentris.
Dari mekanika bahan diketahui bahwa hanya kolom yang sangat pendek
dapat dibebani hingga mencapai tegangan lelehnya, sedangkan keadaan yang
bahan batang sepenuhnya tercapai. Keadaan demikian yang kita sebut dengan
tekuk (buckling). Jadi pengetahuan tentang kestabilan batang tekan perlu bagi
pembaca yang merencanakan struktur baja.
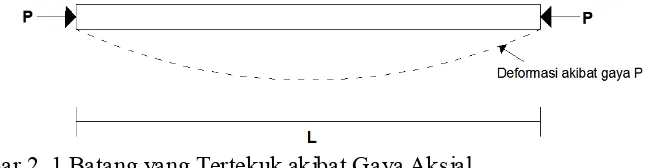
Gambar 2. 1 Batang yang Tertekuk akibat Gaya Aksial
Latar belakang tekuk kolom pertama kali dikemukakan oleh Leonhard
Euler pada tahun 1759. Batang dengan beban konsentris yang semula lurus dan
semua seratnya tetap elastis hingga tekuk terjadi akan mengalami lengkungan
yang kecil pada gambar 2. 1. Walaupun Euler hanya menyelidiki batang yang
dijepit disalah satu ujung dan bertumpu sederhana (simply supported) di ujung
yang lainnya, logika yang sama dapat diterapkan pada kolom yang berperletakan
sendi, yang tidak memiliki pengekangan rotasi dan merupakan batang dengan
kekuatan tekuk terkecil. Kita akan mendapatkan rumus rumus gaya kritis yang
dapat diterima oleh suatu batang sebelum tekuk terjadi.
Pendekatan Euler pada umumnya tidak digunakan untuk perencanaan
karena tidak sesuai dengan percobaan, dalam praktek kolom dengan panjang
umum tidak sekuat seperti yang dinyatakan oleh rumus rumus Euler.
Considere dan Esengger pada tahun 1889 secara terpisah menemukan
bahwa sebagian dari kolom dengan panjang yang umum menjadi inelastis
sebelum tekuk terjadi dan harga E yang dipakai harus memperhitungkan adanya
mereka menyadari bahwa sesungguhnya kolom dengan panjang yang umum akan
hancur akibat tekuk inelastis dan bukan akibat tekuk elastis.
Akan tetapi pengertian yang menyeluruh tentang kolom dengan beban
konsentris baru dicapai pada tahun 1946 ketika Shanley menjabarkan teori yang
sekarang ternyata benar. Ia mengemukakan bahwa hakekatnya kolom masih
mampu memikul beban aksial yang lebih besar walaupun telah melentur, tetapi
kolom mulai melentur pada saat mencapai beban yang disebut beban tekuk, yang
menyertakan pengaruh inelastisitas pada sejumlah atau semua serat penampang
lintang.
Untuk menentukan kekuatan kolom dasar, kondisi kolom perlu didealisir
dengan beberapa anggapan. Mengenai bahan, kita dapat menganggap :
1. Sifat tegangan regangan tekan sama diseluruh titik pada penampang.
2. Tidak ada tegangan internal seperti akibat pendinginan setelah
penggilingan (rolling).
3. Kolom lurus sempurna dan prismatis.
4. Resultan beban bekerja melalui sumbu pusat batang sampai batang mulai
melentur.
5. Kondisi ujung harus statis tertentu sehingga panjang antara sendi sendi
ekivalen dapat ditentukan.
6. Teori lendutan yang kecil seperti pada lenturan yang umum berlaku dan
gaya geser dapat diabaikan.
7. Puntiran atau distorsi pada penampang lintang tidak terjadi selama
Setelah anggapan anggapan diatas dibuat, sekarang disetujui bahwa
kekuatan suatu kolom dapat dinyatakan sebagai:
= =
Dimana :
σkr = tegangan rata rata pada penampang
Et = modulus tangen pada P/A
= angka kelangsingan efektif (ujung sendi ekivalen)
Seperti yang kita tahu batang tekan yang panjang akan runtuh akibat tekuk
elastis dan batang tekan yang pendek yang buntak dapat dibebani sampai bahan
meleleh atau bahkan sampai daerah pengerasan regangan (strain hardening). Pada
keadaan yang umum, kehancuran akibat tekuk terjadi setelah sebagian penampang
melintang meleleh, keadaan ini disebut dengan tekuk inelastis.
Tekuk murni akibat beban aksial sesungguhnya hanya terjadi apabila
anggapan dari (1) sampai (7) diatas berlaku. Kolom biasanya merupakan satu
kesatuan dengan struktur, dan pada hakekatnya tidak dapat berlaku secara
independent. Dalam praktek, tekuk diartikan sebagai pembatasan antara lendutan
stabil dan tidak stabil pada batang tekan: jika bukan kondisi sesaat yang terjadi
pada batang langsing elastis yang diisolir. Banyak insinyur menyebut “beban
tekuk praktis” ini sebagai “beban batas ultimate”.
2. 1. 2 Keruntuhan Batang Tekan
akibat tekuk elastis. Pada keadaan umum kehancuran akibat tekan terjadi diantara
keruntuhan akibat kelelehan bahan akibat tekuk elastis, setelah bagian penampang
melintang meleleh, keadaan ini disebut tekuk inelastis (inelastic buckling).
Ada tiga jenis keruntuhan batang tekan, yaitu:
1. Keruntuhan akibat tegangan yang terjadi pada penampang telah melalui
materialnya.
2. Keruntuhan akibat batang tertekuk elastis (elastic buckling). Keadaan ini
terjadi pada bagian konstruksi yang langsing. Disini hukum Hooke masih
berlaku bagi serat penampang dan tegangan yang terjadi tidak melebihi batas
proporsional.
3. Keruntuhan akibat melelehnya sebagian serat disebut tekuk inelastic (inelastic
buckling). Kasus keruntuhan semacam ini berada diantara kasus (1) dan kasus
(2), dimana pada saat menekuk sejumlah seratnya menjadi inelastis maka
modulus elastisitasnya ketika tertekuk lebih kecil dari harga awalnya.
2. 1. 3 Tegangan Residu
Keberadaan tegangan residu dalam profil sangat mempengaruhi kekuatan
tekuknya. Pengaruh ini diperhitungkan dengan mengambil tegangan residu
maksimum rata rata sebesar 0,3 dari tegangan lelehnya.
Tegangan residu (residual stresses) adalah tegangan yang tertinggal tetap
dalam profil setelah selesai profil dibentuk, meskipun belum ada beban luar yang
bekerja padanya.
Menurut hasil penelitian/penyelidikan, tegangan residu ini timbul oleh
1. Pendinginan setelah proses hot rolling.
2. Cold bending atau cambering selama fabrikasi.
3. Pengelasan.
2. 1. 4 Kelangsingan Batang Tekan ( λ )
Kelangsingan batang tekan ini tergantung dari jari jari kelembaman (i) dan
panjang tekuk (Lk). Karena batang mempunyai dua jari jari kelembaman,
umumnya akan terdapat dua harga λ. Yang menentukan ialah harga λ yang
terbesar (atau dengan i yang terkecil). Panjang tekuk (Lk) ini juga tergantung pada
keadaan ujung ujungnya, apakah sendi, jepit, bebas, dan sebagainya.
2. 1. 5 Angka Kelangsingan ( λbatas )
λbatas adalah batas angka kelangsingan dimana Euler tidak lagi berlaku
(berarti memasuki daerah plastis). Euler hanya berlaku di daerah elastis.
P
kr=
( 2. 1 )Dimana :
Lk = panjang tekuk
E = modulus elastisitas
I = momen inersia terhadap sumbu yang tegak lurus arah tekuk
i = jari jari kelembaman
I = i2 x A ( 2. 4 )
Dimana :
A = luas penampang
Substitusi persamaan ( 2. 4 ) ke dalam persamaan ( 2. 1 ) sehingga
diperoleh :
P
kr=
( 2. 5 )Dengan :
σ
kr=
( 2. 6 )Sehingga :
P
kr= σ
crx A
( 2. 7 )Dimana :
σ
kr = tegangan kritisDimana :
P
kr= σ
crx A
P
kr=
Maka didapat :
σ
krx A =
Sehingga :
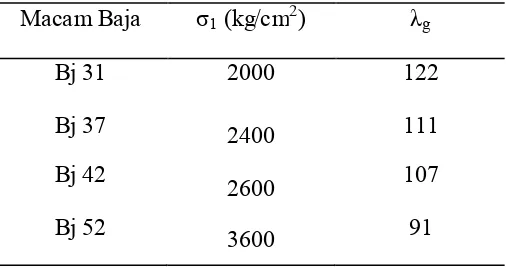
Akibat pengaruh residual strees maka tegangannya menjadi 0,7 σ1, sehingga :
λg = ,!
Selanjutnya λg untuk bermacam macam baja dapat dilihat di tabel berikut :
2. 1. 6 Stabilitas dari Struktur Kolom
Masalah kesetimbangan kolom erat kaitannya dengan stabilitas suatu
struktur batang. Konsep stabilitas sering diterangkan dengan menggangap
kesetimbangan dari bola pejal pada beberapa posisi, yaitu sebagai berikut.
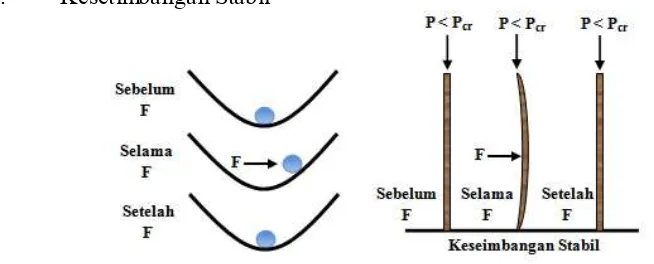
1. Kesetimbangan Stabil
Gambar 2. 2 Kesetimbangan Stabil
Berdasarkan gambar 2. 2 bola pejal berada di permukaan yang cekung.
Kemudian bola pejal berubah posisinya ketika diberikan gaya F. Saat gaya F
hilang, posisi bola pejal kembali seperti semula. Kondisi ini adalah penganalogian
dari suatu kolom bermuatan P < Pkr yang diberikan gaya F tegak lurus sumbu
kolom sehingga mengalami lendutan. Jika gaya F dihilangkan maka kolom akan
kembali ke bentuk linearnya. Kondisi kesetimbangan ini disebut kesetimbangan
stabil (stable equilibrium).
2. Kesetimbangan Netral
Kolom dengan beban P = Pkr dianalogikan dengan bola pejal yang berada
di permukaan datar. Bola pejal tersebut diberi gaya F dan berpindah tempat tanpa
kembali ke tempatnya semula. Berdasarkan anggapan itulah suatu kolom
bermuatan P = Pkr jika diberikan beban sebesar F, maka kolom tersebut akan
mengalami tekuk. Ketika gaya F dilepaskan, kolom tidak akan kembali ke bentuk
linearnya. Kondisi kesetimbangan ini disebut kesetimbangan netral (precarious
equilibrium).
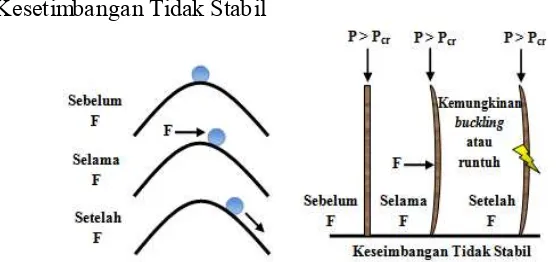
3. Kesetimbangan Tidak Stabil
Gambar 2. 4 Kesetimbangan Tidak Stabil
Bola pejal berada pada permukaan yang cembung kemudian diberikan
gaya F maka akan terjadi pergeseran mendadak. Hal ini merupakan penganalogian
untuk kolom dengan P > Pkr. Kolom diberikan gaya F tegak lurus sumbu kolom
kemudian mengalami deformasi. Apabila beban diberikan secara konstan maka
akan berdampak runtuhnya kolom (bucking). Kondisi kesetimbangan ini disebut
dengan kesetimbangan tidak stabil (unstable equilibrium).
Batang tekan harus direncanakan sedemikian rupa sehingga terjamin
stabilitasnya (tidak ada bahaya tekuk). Hal ini harus diperlihatkan dengan
menggunakan persamaan :
Dimana :
Harga ω dapat dicari dari Tabel 2, 3, 4 atau 5 PPBBI ’83 berdasarkan mutu
baja Bj 34 (Fe 310), Bj 37 (Fe 360), Bj 44 (Fe 430) dan Bj 52 (Fe 510).
Harga λ ini dapat ditentukan dengan persamaan :
λ
g=
,!Sifat baja yang terpenting dalam pengunaanya sebagai bahan konstruksi
adalah kekuatannya yang tinggi, dibandingkan dengan bahan lainnya seperti kayu,
dalam tegangan, regangan maupun dalam kompresi sebelum kegagalan, serta sifat
homogenitas yaitu sifat keseragaman yang tinggi.
Baja merupakan bahan campuran besi ( Fe ), 1,7 % Zat arang atau karbon
(C), 1,65 % mangan, 0,6 % silikon ( Si ) dan 0,6% tembaga ( Cu ). Baja
dihasilkan dengan menghaluskan bijih besi dan logam besi tua bersama sama
dengan bahan tambahan pencampur yang sesuai, dalam tungku temperatur tinggi
untuk menghasilkan massa massa besi yang besar, selanjutnya dibesihkan untuk
menghilangkan kelebihan zat arang dan kotoran kotoran lain.
Berdasarkan persentase zat arang yang dikandung, baja dapat
dikategorikan sebagai berikut :
1. Baja dengan persentase zat arang rendah ( low carbon steel )
Yakni lebih kecil dari 0,15 %
Baja untuk bahan struktur termasuk kedalam baja yang persentase zat
arang yang ringan ( mild carbon steel ), semakin tinggi kadar zat arang yang
terkandung didalamnya, maka semakin tinggi nilai tegangan lelehnya. Sifat sifat
bahan struktur yang paling penting dari baja adalah sebagai berikut :
Modulus elastisitas untuk semua baja ( yang secara relatif tidak tergantung
dari kuat leleh ) adalah 28000 sampai 30000 ksi atau 193000 sampai
207000 Mpa. Nilai untuk desain lazimnya diambil sebesar 29000 ksi atau
200000 Mpa.
Berdasarkan Peraturan Perencanaan Bangunan Baja Indonesia ( PPBBI ),
nilai modulus elastisitas baja adalah 2,1 x 106 kg/cm² atau 2,1 x 105 MPa.
2. Modulus Geser ( G )
Modulus geser setip bahan elastis dihitung berdasarkan formula :
/ = 2 (1+ 4)
Dimana : P = perbandingan poisson yang diambil sebesar 0,3 untuk baja.
Dengan menggunakan P = 0,3 maka akan memberikan G = 11000 ksi atau
77000 MPa.
Berdasarkan Peraturan Perencanaan Bangunan Baja Indonesia ( PPBBI ),
nilai modulus geser ( gelincir ) baja adalah 0,81 x 106 kg/cm² atau 0,81 x
105 MPa.
3. Koefisien Ekspansi ( α )
Koefisien ekspansi adalah koefisien pemuaian linier. Koefisien ekspansi
baja diambil sebesar 12 x 106 per oC.
4. Tegangan Leleh ( σ )
Tegangan leleh ditentukan berdasarkan mutu baja.
5. Sifat sifat lain yang penting.
Sifat – sifat ini termasuk massa jenis baja, yang sama dengan 490 pcf atau
atau 76, 975 kN/m³, berat jenis baja umumnya adalah sebesar 7,850 t/m3.
Untuk mengetahui hubungan antara tegangan dan regangan pada baja
dapat dilakukan dengan uji tarik di laboratorium. Sebagian besar percobaan atas
baja akan menghasilkan bentuk hubungan antara tegangan dan regangan seperti
tergambar di bawah ini.
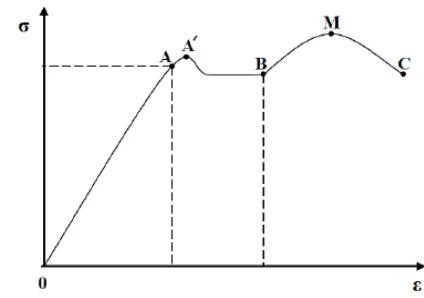
Gambar 2. 5 Hubungan Tegangan Regangan untuk Uji Tarik pada Baja
Lunak
Keterangan gambar :
σ = tegangan baja
ε = regangan baja
A = titik proporsional
A’ = titik batas elastis
B = titik batas plastis
M = titik runtuh
C = titik putus
Dari gambar di atas dapat dilihat bahwa sampai titik A hubungan antara
tegangan dan regangan masih linier atau keadaan masih mengikuti hukum Hooke.
regangan untuk baja lunak memiliki titik leleh atas ( upper yield point ), σy dan
daerah leleh datar. Secara praktis, letak titik leleh atas ini, A’ tidaklah terlalu
berarti sehingga pengaruhnya sering diabaikan. Titik A’ sering juga disebut
sebagai titik batas elastis ( elasticity limit ). Sampai batas ini bila gaya tarik
dikerjakan pada batang baja maka batang tersebut akan berdeformasi. Selanjutnya
bila gaya itu dihilangkan maka batang akan kembali kebentuk semula. Dalam hal
ini batang tidak mengalami deformasi permanen.
Bila beban yang bekerja bertambah, maka akan terjadi pertambahan
regangan tanpa adanya pertambahan tegangan. Sifat pada daerah AB inilah yang
disebut sebagai keadaan plastis. Lokasi titik B, yaitu titik batas plastis tidaklah
pasti tetapi sebagai perkiraan dapat ditentukan yakni terletak pada regangan 0,014.
Daerah BC merupakan daerah strain hardening, dimana pertambahan
regangan akan diikuti dengan sedikit pertambahan tegangan. Disamping itu,
hubungan tegangan dengan regangannya tidak lagi bersifat linier. Kemiringan
garis setelah titik B ini didefenisikan sebagai Ez. Di titik M, yaitu regangan
berkisar antara 20 % dari panjang batang, tegangannya mencapai nilai maksimum
yang disebut sebagai tegangan tarik batas ( ultimate tensile strength ). Akhirnya
bila beban semakin bertambah besar lagi maka titik C batang akan putus.
Tegangan leleh adalah tegangan yang terjadi pada saat baja mulai meleleh.
Dalam kenyataannya, sulit untuk menentukan besarnya tegangan leleh, sebab
perubahan dari elastisitas menjadi plastis seringkali besarnya tidak tetap. Sebagai
sejajar dengan sudut kemiringan modulus elastisitasnya, dari regangan sebesar
0,2 %.
Gambar 2. 6 Penentuan Tegangan Leleh
Dari titik regangannya 0,2 % ditarik garis sejajar dengan garis OB
sehingga memotong grafik tegangan regangan dan memotong sumbu tegangan.
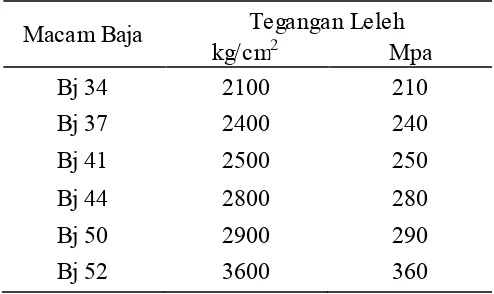
Tegangan yang diperoleh ini disebut dengan tegangan leleh. Tegangan tegangan
leleh dari bermacam macam baja bangunan diperlihatkan pada tabel 2. 2 di bawah
ini :
Tabel 2. 2 Harga Tegangan Leleh
Baja memiliki beberapa kelebihan sebagai bahan konstruksi, diantaranya :
1. Nilai kesatuan yang tinggi per satuan berat
Macam Baja Tegangan Leleh kg/cm2 Mpa
Bj 34 2100 210
Bj 37 2400 240
Bj 41 2500 250
Bj 44 2800 280
Bj 50 2900 290
2. Keseragaman bahan dan komposit bahan yang tidak berubah terhadap
waktu
3. Dengan sedikit perawatan akan didapat masa pakai yang tidak terbatas
4. Daktalitas yang tinggi
5. Mudah untuk diadakan pengembangan struktur
Di samping itu baja juga mempunyai kekurangan dalam hal :
1. Kekuatan baja lemah dalam memikul beban tekan
2. Biaya pengadaan anti api yang besar ( fire proofing cost )
3. Dibandingkan dengan kekuatannya kemampuan baja melawan tekuk kecil
4. Nilai kekuatannya akan berkurang, jika dibebani secara berulang /
periodik, hal ini biasanya disebut dengan leleh atau fatigue.
Dengan kemajuan teknologi, perlindungan terhadap karat dan kebakaran
pada baja sudah ditemukan, hingga akibat buruk yang mungkin terjadi bisa
dikurangi/dihindari.
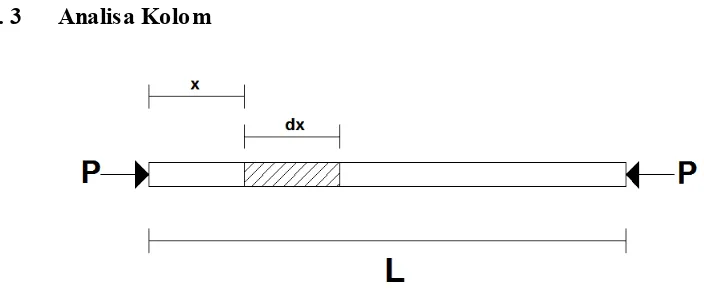
2. 3 Analisa Kolom
Gambar 2. 7 Batang Lurus yang Dibebani Gaya Aksial
Sebuah batang lurus dengan panjang L yang dibebani oleh gaya aksial P
seperti yang diperhatikan pada gambar 2. 5 uraian gaya gaya yang bekerja pada
adalah komponen gaya longitudinal dan transversal pada potongan itu, dan M
adalah momen lentur.
Gambar 2. 8 Potongan Batang Sejauh x dari Tumpuan
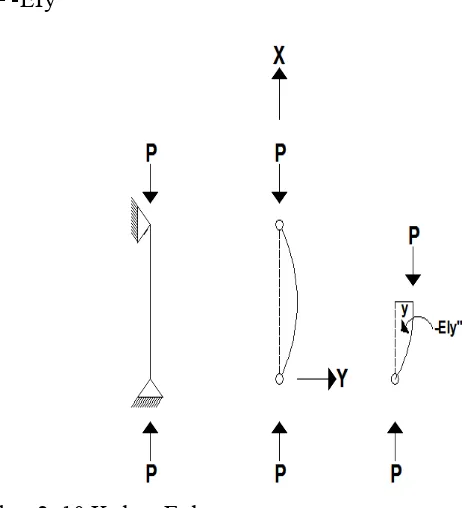
Pengaruh dari adanya rotasi struktur, persamaan kesetimbangan dari
elemen kolom ramping yang terdeformasi diperlihatkan pada gambar 2. 7.
Gambar 2. 9 Kolom Terdeformasi
Untuk deformasi yang kecil, maka dapat diasumsikan bahwa sudut putar β
adalah kecil. Dengan demikian sin β dan cos β secara berurutan dapat dianggap β
dan l. Persamaan kesetimbangan gaya dapat diperoleh dengan menguraikan
masing masing gaya yang bekerja sesuai dengan subu x dan y. Dari uraian gaya
pafa sumbu x diperoleh :
N + ( N + dN ) – Q β + ( Q + dQ ) ( β + dβ ) = 0
NI + QI + βI = 0
Dimana :
NI = dN/dx
QI = dQ/dx
Dari uraian gaya pada sumbu y diperoleh :
geser melintang sangat kecil. Kita biasanya mengambil asumsi bahwa bentuk
kuadratik yang menggambarkan interaksi non linear antara gaya geser yang kecil
dan putaran dapat diabaikan. Dari asumsi yang diambil maka tiga persamaan
kesetimbangan disederhanakan menjadi bentuk berikut :
NI = 0 ( 2. 13 )
diperoleh :
NI= 0
(EIII)II– NyII = 0
Untuk harga EI yang konstan, persamaan menjadi :
NI = 0
EIyIV – N yII = 0
Persamaan ( 2. 14 ) merupakan bentuk kuadrik dalam variabel variabel N
dan Y. Oleh karena itu merupakan persamaan diferensial non linier. Dari
persamaan ( 2. 13 ) terlibat bahwa N konstan sepanjang X dan dari kondisi batas
x=0 dan x=1, kita lihat bahwa N = P. Dengan demikian persamaann ( 2. 14 )
dapat disederhanakan menjadi bentuk lazim dikenal :
EIyIV – PyII = 0 ( 2. 17 )
Persamaan di atas adalah diferensial dari kolom ramping yang mengalami
tekukan. Dari persamaan dapat ditentukan besarnya pada saat struktur akan
runtuh. Misalnya k2 = P/EI dan subtitusikan kedalam persamaan sehingga
diperoleh :
678
6%8 + K 676% = 0 ( 2. 19 )
Persamaan umum dari persamaan diferensial adalah :
Dimana : A, B, C, D adalah tetapan tertentu yang dapat ditentukan dengan
menggunakan syarat syarat batas yaitu kondisi batas ujung ujung batang
atau yang disebut dengan boundary condition.
2. 3. 1 Kolom Euler
Rumus kolom Euler diturunkan dengan membuat berbagai anggapan
sebagai berikut :
1. Bahan elastis sehingga memenuhi Hukum Hooke
2. Material homogen sempurna dan isotropis
3. Batang pada mulanya lurus sempurna, prismatis dan beban terpusat
dikerjakan sepanjang sumbu titik berat penampang
4. Penampang batang tidak terpuntir, elemennya tidak dipengaruhi tekuk
setempat dan distorsi lainnya selama melentur
5. Batang bebas dari tegangan residu
6. Ujung ujung batang ditumpu sederhana. Ujung bawah ditumpu pada sendi
yang tidak dapat berpindah, ujung atas ditumpu pada tumpuan yang dapat
berotasi dengan bebas dan bergerak vertical tetapi tidak dapat bergerak
horizontal.
7. Deformasi dari batang cukup kecil sehingga bentuk ( y’ )² dari persamaan
kurva y” / (1 + (y’)2)2/3 dapat diabaikan. Dari sini kurva dapat didekati
dengan y”.
Bahwa batang yang ditekan akan mengalami bentuk yang sedikit
melengkung seperti pada gambar 2. 10. Jika sumbu koordinat diambil seperti
asal adalah :
Mx = EIy” ( 2. 21 )
Gambar 2. 10 Kolom Euler
Dengan menyamakan momen lentur luar P.y, maka diperoleh persamaan :
EIy” + P.y = 0 ( 2. 22 )
Persamaan ( 2. 21 ) adalah persamaan diferensial linear dengan koefisien
konstan dan dapat dirubah menjadi :
y” + k².y = 0 ( 2. 23 )
Dimana :
k² = 9 ( 2. 24 )
Penyelesaian umum persamaan ( 2. 22 )
y = A sin kx + B cos kx ( 2. 25 )
Untuk menentukan besaran konstanta A dan B, maka menggunakan syarat batas :
y = 0 dan x = 1
Dengan memasukkan syarat batas pertama ke dalam persamaan ( 2. 25 )
maka diperoleh :
B = 0
Sehingga diperoleh :
y = A sin kx ( 2. 26 )
Dari syarat batas kedua diperoleh :
A sin kl = 0 ( 2. 27 )
Persamaan ( 2. 27 ) dapat dipenuhi oleh tiga keadaan yaitu :
1. Konstanta A = 0, yaitu tidak ada lendutan ( 2. 28 )
Pada beban yang diberikan oleh persamaan ( 2. 31 ) kolom berada dalam
keadaan kesetimbangan dalam bentuk yang agak bengkok, dimana bentuk
deformasinya diberikan oleh persamaan ( 2. 32 ).
Ragam (mode) tekuk dasar yaitu lendutan dengan lengkungan tunggal
akan diperoleh jika nilai n diambil sama dengan 1, dengan demikian beban kritis
Pkr =
; ( 2. 33 )
Dan persamaan lendutan menjadi :
Y =
sin
%; ( 2. 34 )
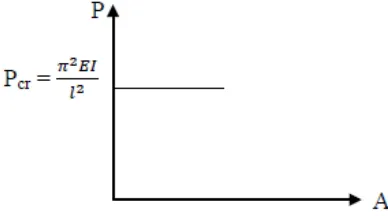
Kelakuan kolom Euler dapat digambarkan secara grafik seperti
pada gambar :
Gambar 2. 11 Grafik Kolom Euler
Dari grafik dapat dilihat bahwa sampai beban Euler dicapai, kolom harus
tetap lurus. Pada beban Euler ada percabangan kesetimbangan yaitu kolom dapat
tetap lurus atau dapat dianggap berubah bentuk dengan amplitude tidak tentu.
Kelakuan ini menunjukkan bahwa keadaan kesetimbangan pada saat beban Euler
merupakan transisi dari kesetimbangan stabil dan tidak stabil.
2. 3. 2 Rumus Kolom Euler untuk Berbagai Pe rletakan
2. 3. 2. 1 Kolom dengan Satu Ujung Terjepit dan yang lainnya Bebas
Tinjau suatu sumbu sumbu koordinat seperti ditunjukkan pada gambar,
dimana kolom dalam kedudukan yang agak melengkung, menghasilkan momen
lentur pada suatu penampang melintang sebesar :
M = P ( δ – y ) ( 2. 35 )
Dan persamaan diferensial M = EI 6 7
EI6 7
6% = P (δ – y ) ( 2. 36 )
Karena ujung atas kolom adalah bebas, maka jelaslah bahwa tekuk pada
kolom akan terjadi pada bidang dengan kekakuan lengkungan terkecil, yang
dianggap merupakan bidang simetris.
Nilai EI yang terkecil ini digunakan dalam persamaan ( 2. 36 ) di atas dan dengan
memakai notasi sebelumnya yaitu :
k² = 9
Kita dapat menuliskan persamaan dalam bentuk :
6 7
6% + k²y = k² δ
Penyelesaian umum dari persamaan ini adalah :
Y = A cos kx + B sin kx + δ
Dimana A dan B adalah konstanta integrasi, yang ditentukan dari syarat syarat
ujung jepit kolom yaitu :
Y = 67
6% = 0 pada x = 0
Syarat syarat ini dipenuhi jika :
A = δ B = 0
Dan persamaan b menjadi :
Y = δ ( 1 – cos kx ) ( 2. 37 )
Sedang syarat pada ujung bebas kolom menghendaki bahwa
Y = δ pada x = 1
Yang memenuhi jika
Persamaan c menghendaki bahwa salah satu δ dan cos kl harus nol. Bila δ = 0,
maka lengkungan tidak ada. Bila cos kl = 0, kita akan memperoleh hubungan
Kl = ( 2n – 1 ) /2 ( 2. 38 )
Dimana n = 1, 2, 3,…… persamaan ini untuk menentukan nilai nilai k
sehubungan dengan bentuk tekukan yang terjadi.
Nilai kl terkecil yang memenuhi persamaan ( 2. 38 ) diperoleh dengan
mengambil n = 1, memberikan nilai beban kritis terkecil yaitu :
Kl = l 9 =
Atau
Pkr =
&;
( 2. 39 )
Besaran kx dalam persamaan ( 2. 37 ) untuk kasus ini berubah ubah dari 0
s/d /2, dan bentuk lengkungan seperti ditunjukkan pada gambar di atas.
Dengan mensubtitusikan n = 2, 3, . . . . ke dalam persamaan ( 2. 38 ), kita peroleh
hubungannya dengan nilai nilai beban kritis sebagai berikut :
Pkr = +
&; Pkr=
* &;
Besaran kx menurut persamaan ( 2. 37 ) dalam hal ini berubah dari 0 s/d
3/2, dari 0 s/d 5/2, . . . , dan hubungannya dengan kurva lengkungan pada gambar
( 2. 37 ) dan gambar ( 2. 38 ). Untuk bentuk kurva lengkungan pada gambar
( 2. 37 ) diperlukan suatu gaya sebesar sembilan kali beban kritis terkecil, dan
keadaan pada gambar ( 2. 38 ), diperlukan gaya sebesar dua puluh lima kali beban
Bentuk bentuk tekukan seperti itu hanya dapat terjadi pada batang yang
sangat ramping, dan dengan memasang penyokong pada titik peralihan untuk
mencegah lengkungan lateral. Sebaliknya bentuk tekukan ini adalah tidak stabil,
dan mempunyai arti praktis yang kecil, sebab struktur telah mengalami suatu
lengkungan yang besar pada saat beban mendekati nilai nilai yang diberikan oleh
persamaan ( 2. 39 ).
Gambar 2. 12 Kurva Lendutan Tekuk Sinusoidal dengan Satu Ujung Terjepit dan
yang Lainnya Bebas
2. 3. 2. 2 Kolom dengan Kedua Ujungnya berupa Sendi
Mint – P.y = 0 ( 2. 40 )
Dari hubungan momen dengan kelengkungan didapat :
Mint = EI 6 7
6% ( 2. 41 )
EIy” – P.y = 0 ( 2. 42 )
EIy” + P.y = 0
y” + 9
?
= 0 ;
9 dimisalkan @2y” + k2y = 0 ( 2. 43 )
Jawaban umum persamaan diferensial di atas :
Dari syarat batas yang ada, y = 0 pada saat x = 0 dan x = L
Untuk x = 0 ; y = B = 0
Untuk x = L ; y = A sin kl = 0
Karena A ≠ 0 maka sin kl = 0
kl = nπ
@2
= : ( 2. 45 )
Untuk n = 1
P =
Dimana I = inersia pada sumbu lemahnya
Pada suatu kasus kolom dengan kedua ujungnya berupa sendi (gambar 2.
13), tampak dari kesimetrisannya bahwa tiap setengah panjang batang adalah
mirip dengan batang pada gambar 2.13. Karena itu beban kritis pada kasus ini
diperoleh dengan mensubtitusikan l/2 untuk besaran l dalam persamaan, yang
memberikan
Pkr=
& A = ; ( 2. 46 )
Kasus suatu batang dengan kedua ujung berupa sendi, mungkin dianggap
lebih sering dalam prakteknya dari yang lain. Kasus ini disebut “kasus dasar”
Gambar 2. 13 Kolom dengan Kedua Ujungnya berupa Sendi
2. 3. 2. 3 Kolom dengan Kedua Ujungnya Terjepit
Bila kedua ujung kolom berupa jepitan (gambar 2. 12), maka ada momen
momen reaksi yang mencegah ujung ujung kolom dari perputaran selama tekukan
terjadi. Momen momen ujung dan gaya gaya tekan aksial adalah ekivalen dengan
gaya gaya P yang bekerja eksentris seperti ditunjukkan pada gambar. Titik titik
peralihan ditempatkan dimana garis kerja gaya P memotong kurva lengkungan,
sebab pada titik titik ini momen lentur adalah nol.
Titik titik peralihan dan titik tengah bentang membagi batang atas empat bagian
yang sama. Oleh karena itu, beban kritis dalam kasus ini diperoleh dengan
mensubtitusikan l/4 untuk besaran l, yaitu :
EI 6 7
6% + Py = Mo ( 2. 47 )
6 7 6% + k
2
y = BC ( 2. 48 )
dimana, k² = 9
Penyelesaian dari persamaan ini adalah :
y = A sin kx + B cos kx + BC
Dari syarat batas : 67 6% = 0
y = 0 pada x = 0
y = 0 pada x = 0 didapat ;
B = BC
9
, dan A = 0
Sehingga :
y = DE (1−cos@F) ( 2. 50 )
cos kl = 1.0 ( 2. 51 )
kl = 2π
Maka didapat :
Pkr=
&; ( 2. 52 )
2. 3. 2. 4 Kolom dengan Kedua Ujung Terjepit tetapi Salah Satu dapat Bergeser Arah Lateral
Pada gambar 2. 15 tampak bahwa kolom bebas gerak arah lateral pada
ujung atas tetapi dikendalikan sedemikian rupa, sehingga garis singgung pada
kurva elastis tetap tegak. Dengan adanya titik peralihan pada pertengahan bentang
(gambar 2. 13b.), beban kritis didapatkan dengan mensubtitusikan l/2 untuk l
dalam persamaan ( 2. 52 ), dan dengan demikian dalam kasus ini juga berlaku
rumus ( 2. 46 ).
Gambar 2. 15 Kolom dengan Kedua Ujung Terjepit tetapi Salah Satu dapat
Bergeser arah Lateral
2. 3. 2. 5 Kolom dengan Ujung-ujung Terjepit dan Sendi
Kita tinjau suatu penampang mn sejauh x dari sendi, dan dengan
lengkungan sebesar y (gambar), memberikan momen lentur sebesar :
Mx = P.y + H0.x ( 2. 53 )
Dengan demikian persamaan menjadi :
EI 6 7
Gambar 2. 16 Kolom dengan ujung ujung Terjepit dan Sendi
Dan dengan bantuan notasi k² = P/EI, persamaan b dapat dituliskan dalam bentuk:
6 7
6% + k²y =
−
HCF
( 2. 55 )
Penyelesaian umum dari persamaan ini adalah :
Y = A cos kx + B sin kx HC
9
F
( 2. 56 )Dimana A dan B adalah konstanta integrasi, yang ditentukan dari syarat syarat
ujung kolom yaitu :
Y = 0 pada x = 0 dan x = l
dy/dx = 0 pada x = l
Dari syarat ujung y = 0 pada x = 0 diperoleh A = 0. Untuk y = 0 pada x = l
memerlukan :
B = HC ;
9 IJK L; ( 2. 57 )
Sedang untuk dy/dx = 0 pada x = l memberikan :
Untuk memecahkan persamaan dipakai metoda grafis. Kurva kurva pada gambar
menyatakan tg kl sebagai fungsi kl. Kurva kurva ini menyinggung garis tegak kl
=π /2, 3π/2,. . . . pada titik jauh tak terhingga ( secara asimtotis ).
Gambar 2. 17 Kurva kl
Akar akar persamaan ditunjukkan oleh titik perpotongan kurva dengan
garis lurus y = kl. Akar terkecil adalah absis dari koordinat titik A yaitu sebesar :
Kl = 4,493 radian
Yang memberikan nilai beban kritis sebesar
Pkr = ,$+
;
=
( ,M++$) ( 2. 59 )Dalam setiap kasus yang telah diterangkan diatas, dianggap bahwa kolom
bebas tertekuk dalam suatu arah, maka jelaslah bahwa besaran EI menyatakan
kekakuan lengkung terkecil. Jika kolom dikekang sedemikian rupa, sehingga
tekukan hanya mungkin dalam satu bidang utama saja, maka EI menyatakan
kekakuan lengkung dalam bidang itu.
Dalam pembicaraan sebelumnya juga dianggap bahwa batang sangat
langsing, sehingga tegangan tekan terbesar yang terjadi selama tekukan masih di
rumus rumus beban kritis diatas dapat berlaku. Untuk menentukan batas
pemakaian rumus rumus ini, mari kita tinjau kasus dasar seperti yang telah
disebutkan sebelumnya. Dengan membagi beban kritis dari pers. Dengan luas
penampang melintang A, dan mengambil
r = ( 2. 60 )
Dimana r menyatakan jari jari putaran, besar tegangan tekan kritis adalah
σkr
=
9=
A ( 2. 61 )Tegangan ini hanya tergantung pada besaran E dan rasio kelangsingan l/r.
Sebagai contoh, pada suatu struktur baja, batas proporsional 2100 kg/cm² dan E =
2,1 x 106 kg/cm², maka didapat nilai l/r terkecil dari pers. ( 2. 61 ) sebesar 100.
Karenanya, beban kritis pada kolom dari bahan ini, yang bersendi pada kedua
ujungnya, dapat dihitung dengan pers. ( 2. 46 ), bila diinginkan rasio l/r lebih
besar dari 100.
Jika l/r lebih kecil dari 100, tegangan tekan sudah mencapai batas proporsional
sebelum terjadi tekukan, sehingga pers ( 2. 46 ) tidak berlaku.
Persamaan ( 2. 53 ) dapat dinyatakan secara grafis oleh kurva ACB pada
gambar 2. 16, dimana tegangan kritis digambarkan sebagai fungsi l/r. Kurva
mendekati sumbu mendatar secara asimtot, dan tegangan kritis mendekati nol
dengan bertambahnya rasio kelangsingan. Kurva juga mendekati sumbu tegak
secara asimtot tetapi yang berlaku hanya sepanjang tegangan σcr yang masih
proportiona sebesar 2100 kg/cm². jadi hanya bagian BC dari kurva yang
memenuhi.
Sekarang bandingkan kasus kasus lain yang dinyatakan pada gambarm 2.
16, analog didapat rumus tegangan tegangan kritis sebagai berikut :
σkr = A σkr= A σkr= N,OPPA
Gambar 2. 18 Kurva ACB
Tampak bahwa ketiga persamaan analog dengan persamaan ( 2. 62 ),
dimana panjang l sebenarnya digantikan dengan panjang reduksi L. Dengan
demikian dapat dituliskan secara umum rumus tegangan sebagai berikut :
σkr = Q ( 2. 62 )
Dimana besaran L = 2l, l/2, atau 0,6991.
2. 4 Panjang Efektif
Kolom dengan kekangan yang besar terhadap rotasi dan translasi ujung
ujungnya (contohnya tumpuan jepit) akan mampu menahan beban yang lebih
besar dibandingkan dengan kolom yang mengalami rotasi serta translasi pada
bagian tumpuan ujungnya (contohnya adalah tumpuan sendi). Selain kondisi
tekan juga tergantung dari panjang efektifnya. Semakin kecil panjang efektif suatu
komponen struktur tekan, maka semakin kecil pula risikonya terhadap masalah
tekuk.
Sejauh ini pembahasan mengenai kekuatan kolom mengasumsikan sendi
dimana tidak ada kekangan rotasional momen. Kekangan momen nol pada ujung
merupakan situasi paling lemah untuk batang tekan yang salah satu ujungnya
tidak dapat bergerak transversal relatif terhadap ujung yang lainnya. Untuk kolom
berujung sendi semacam ini, panjang ekivalen ujung sendi kL merupakan panjang
L sebenarnya, dengan demikian K = 1,0 seperti pada tabel 2. 3. Panjang L
ekivalen berujung sendi disebut panjang efektif.
Untuk kebanyakan situasi nyata, kekangan momen pada ujung ujung yang
ditahan seperti pada tabel 2. 3. Dimana panjang efektif tereduksi dalam banyak
situasi, sangat sulit, atau bahkan tidak mungkin, untuk menilai secara tepat derajat
kekangan momen yang disumbangkan oleh batang batang berdekatan yang
mengikat ke kolom, oleh pondasi setempat dan lapisan tanah dibawahnya dan
interaksi penuh semua batang dalam struktur rangka baja.
Baik apakah derajat ujung ditentukan dengan tepat atau tidak,desainer
harus memahami konsep tentang braced frame (goyangan dicegah dengan sabuk
penyokong) dan unbraced frame (tanpa sabuk penyokong, goyangan tidak
dicegah).
Panjang efektif suatu kolom secara sederhana dapat didefinisikan sebagai
jarak di antara dua titik pada kolom tersebut yang mempunyai momen sama
kelengkungan kolom. Dalam perhitungan kelangsingan komponen struktur tekan
(λ = L/i), panjang komponen struktur yang digunakan harus dikalikan dengan
suatu faktor panjang tekuk k untuk memperoleh panjang efektif dari kolom
tersebut. Besarnya faktor panjang efektif sangat tergantung dari kondisi perletakan
pada ujung ujung komponen struktur tersebut. Prosedur penentuan nilai k
dilakukan dengan analisa tekuk terhadap suatu kolom.
Panjang efektif batang kolom pada suatu portal, bergantung pada jenis
portal yang ditinjau, yaitu portal bergoyang dan portal tidak bergoyang. Portal tak
bergoyang (yang disokong) adalah portal yang kestabilan lateralnya diberikan
oleh penyambung yang memadai ke penopang diagonal ke dinding geser, ke
struktur di dekatnya yang memiliki stabilitas lateral yang memadai, atau ke plat
lantai atau penutup atap yang diikat secara horizontal terhadap dinding atau
dengan system penopang yang sejajar dengan bidang portal. Atau dengan kaya
lain portal tak bergoyang didefenisikan sebagai portal yang tekuk bergoyangnya
dicegah oleh elemen penopang yang tidak termasuk rangka struktural itu sendiri.
Faktor K untuk portal bergoyang adalah 0<K<1.
Sedangkan portal tidak bergoyang (yang tidak disokong) adalah portal
yang kestabilan lateralnya bergantung pada kekakuan lentur balok dan kolom
yang disambung secara kaku. Faktor K untuk portal bergoyang adalah K>1.
Faktor panjang efektif (K) untuk kolom ideal dengan perletakan yang berbeda dapat
2. 5 Metode Beda Hingga 2. 5. 1 Pendahuluan
Metode beda hingga adalah teknik numerik untuk mendapatkan solusi
perkiraan untuk persamaan diferensial. Dalam metode persamaan diferensial
digantikan oleh seperangkat setara persamaan aljabar yang biasanya lebih mudah
untuk memecahkan daripada persamaan diferensial. Dasar dari teknik beda hingga
adalah bahwa turunan dari suatu fungsi pada suatu titik dapat didekati dengan
ekspresi aljabar yang terdiri dari nilai fungsi pada saat itu dan di beberapa titik di
dekatnya. Mengingat fakta ini adalah mungkin untuk mengganti derivatif dalam
persamaan diferensial dengan ekspresi aljabar dan dengan demikian mengubah
persamaan diferensial menjadi persamaan aljabar.
Sebagai aturan, persamaan diferensial menggambarkan perilaku sistem
yang berkelanjutan, sedangkan persamaan aljabar menggambarkan perilaku
sistem parameter yang disamakan. Penggantian fungsi kontinu dalam persamaan
diferensial dengan ekspresi aljabar yang terdiri dari nilai fungsi yang di beberapa
titik diskrit demikian setara dengan mengganti sistem kontinyu dengan satu terdiri
dari sejumlah diskrit poin massa. Metode beda hingga karena itu mirip dengan
metode energi yang baik menyederhanakan solusi dari masalah dengan
mengurangi jumlah derajat kebebasan. Metode energi ini dilakukan dengan
mendekati perilaku sistem, yaitu, dengan asumsi bentuk dibelokkan, sedangkan
teknik beda hingga menyederhanakan sistem itu sendiri.
Secara umum, jika sistem kontinu diganti dengan n titik massa diskrit,
diferensial diganti dengan n simultan persamaan aljabar dalam variabel tersebut.
Karena turunan dari fungsi yang tidak diketahui di titik didekati oleh ekspresi
yang terdiri dari nilai fungsi pada saat itu dan di beberapa titik tetangga, semakin
dekat titik titik yang satu dengan yang lain yang lebih baik adalah perjanjian
antara turunan dan aljabar pendekatan, dan lebih akurat akan menjadi solusi untuk
masalah ini. Namun, karena jumlah poin meningkatkan begitu juga dengan jumlah
persamaan simultan yang harus dipecahkan.
Karena jumlah besar pekerjaan numerik yang terlibat, metode beda hingga
yang sangat cocok untuk digunakan ketika kecepatan tinggi komputer elektronik
tersedia.
Kerugian utama dari metode ini adalah bahwa hal itu memberikan nilai
numerik dari fungsi yang tidak diketahui pada titik titik diskrit bukan ekspresi
analitis yang berlaku untuk seluruh sistem. Jika ekspresi analitis diperlukan, itu
harus diperoleh dengan pas kurva dengan nilai nilai diskrit yang diperoleh dalam
larutan. Kelemahan ini akan lebih parah masalah keseimbangan daripada di
masalah eigenvalue, karena hubungan berlaku umum biasanya dapat diperoleh
untuk beban kritis, sedangkan ekspresi terus menerus untuk fungsi defleksi yang
pernah diperoleh. Terlepas dari kelemahan tersebut, prosedur beda hingga adalah
metode analisis yang sangat berguna di berbagai penerapan perusahaan.
2. 5. 2 Rasio Diferensial
Turunan dari fungsi, pada suatu titik, dapat dinyatakan kurang dalam hal
nilai fungsi pada saat itu dan nilai pada satu atau lebih poin terdekat. Hal seperti
gambar. 2. 19, yang nilainya diketahui pada x = i dan di beberapa titik merata
spasi ke kanan dan ke kiri x = i.
Gambar 2. 19 Rasio Diferensial
Turunan pertama dari f (x) pada titik x dapat didekati dengan
RS
RF ≅ S (F + ∆F) − S (F)∆F
Pada x = i ungkapan ini dapat ditulis dalam bentuk
6V
6% %W
≅ ∆S =
VXYZ- VX
[ ( 2. 63 )
Dimana fi dan f i + h adalah nilai nilai dari fungsi f (x) pada x = i, dan pada x = i +
h, h adalah jarak antara dua titik, dan f i adalah pendekatan dari derivatif df / dx
di x = i. Hal ini jelas bahwa perbedaan antara turunan dan pendekatan yang f
akan menurun sebagai h menurun.
Pendekatan dari df / dx turunan yang diberikan oleh Persamaan. ( 2. 63 )
melibatkan f fungsi pada x = i dan pada titik di sebelah kanan x = i. Oleh karena
itu dikenal sebagai forward difference. Persamaan serupa yang melibatkan fungsi
f di x = i dan pada x = i h adalah
∆S =
VX- VX\ZBentuk pendekatan ini dikenal sebagai backward difference. Persamaan ketiga
mungkin melibatkan poin di kedua sisi x = i
∆S =
VXYZ- VX\Z[ ( 2. 65 )
Hal ini dikenal sebagai diferensial utama. Dari tiga pendekatan, diferensial utama
adalah yang paling akurat untuk diberikan jarak h. Diskusi yang tersisa berurusan
dengan pendekatan derivatif yang lebih tinggi karena itu akan terbatas pada
diferensial utama.
Setelah diferensial pertama telah ditetapkan, diferensial kedua dapat
diperoleh dengan mengambil perbedaan perbedaan pertama. Jika b didefinisikan
sebagai operator perbedaan yang sesuai dengan operator diferensial d / dx, maka
∆ S = ∆(∆S ) =
∆]VXYZ[- VX\Z^=
∆VXYZ- ∆V[ X\ZPersamaan ( 2. 66 ) memberikan diferensial sentral kedua di titik x = i.
∆
&S = ∆ (∆ S) =
∆ S
`[− 2∆ S + ∆ S
-[ℎ
=
_XY Z\ _XYZY _X
Z - _XYZ\ _XY _X\ZZ ` _X\ _X\ZY _X\ ZZ
[
=
VXY Z- &VXYZ` MVX- &VX\Z` VX\ Z[8 ( 2. 68 )
Dengan "molekul komputasi" pada gambar 2. 20 memberikan representasi
Gambar 2. 20 Molekul Komputasi untuk Rasio Diferensial
bergambar pers. ( 2. 64 ), ( 2. 65 ), ( 2. 66 ), dan ( 2. 67 ). Ini cara yang sangat
nyaman mewakili rasio perbedaan yang disebabkan oleh Bickley.
2. 6 Perhitungan Beban Kritis dengan Beda Hingga
Dalam tugas akhir ini metode beda hingga akan digunakan untuk
menentukan beban kritis kolom sendi sendi yang ditunjukkan pada
gambar 2. 21(a).
Solusinya mengikuti garis besar umum dari analisis yang sama disampaikan oleh
Salvadori. Persamaan diferensial dan batas kondisi untuk kolom sendi sendi yang
?
′′+
9?
Dan
y(0) = y(l) = 0 ( 2. 70 )
Untuk mendapatkan hubungan diferensial yang sesuai, rentang anggota dibagi
menjadi segmen segmen yang sama n panjang h = l / n dan lendutan pada akhir
segmen i dinotasikan dengan yi (gambar 2. 21(b)).
Menurut persamaan. ( 2. 66 ), turunan kedua pada titik i dapat didekati dengan
rasio diferensial
Gambar 2. 21 Kolom Sendi sendi Dibagi Menjadi Segmen yang Sama n
∆ ? =
7XYZ- 7X` 7X\Z[
( 2. 71 )
di mana yi + 1 dan yi 1 adalah defleksi pada titik titik di kedua sisi titik i.
Jika ( 2. 71 ) digantikan turunan kedua dalam Pers. ( 2. 69 ), diperoleh
?
`[− 2? + ?
-[+
9[? = 0
( 2. 72 )persamaan diferensial pada titik i.
Persamaan diferensial adalah ekspresi yang tepat dari kondisi
sepanjang anggota tersebut. Sebagai perbandingan, persamaan diferensial
mengungkapkan kondisi keseimbangan hanya kira kira, dan dengan memuaskan
menjadi salah satu upaya untuk menetapkan keseimbangan hanya pada titik x = i.
2. 6. 1 Pendekatan Pertama n = 2
Biarkan anggota yang dibagi menjadi dua bagian yang sama panjang h = l
/ 2, dan membiarkan ujung segmen ini akan ditandai dengan i = 0, 1, dan 2, seperti
ditunjukkan pada gambar 2. 21. Dalam hal ini, perlu untuk menulis persamaan
diferesial hanya pada titik i = 1. Pada dua titik batas, baik defleksi dan lengkung
kurvatur dan memenuhi persamaan.
Gambar 2. 22 Pendekatan dengan n = 2
Tertulis persamaan ( 2. 72 ) di i = 1 memberikan
? − 2?
$+ ? +
9;&?
$= 0
( 2. 73 )Dari kondisi batas
y0 = y2 = 0
Jadi :
Seperti khas di masalah tekuk linear, persamaan. ( 2. 74 ) mengarah ke solusi
trivial pada beban apapun, asalkan y1 = 0, dan untuk beban kritis
L
=
d ; ( 2. 75 )Perbandingan hasil ini dengan solusi yang tepat, 9,87 EI / l2, menunjukkan
pendekatan beda hingga menjadi kesalahan sekitar 19%. Untuk mendapatkan
solusi yang lebih akurat, maka perlu memenuhi persamaan perbedaan pada lebih
dari satu titik interior.
2. 6. 2 Pendekatan Kedua n = 3
Gambar 2. 23 Pendekatan dengan n = 3
Jika anggota tersebut dibagi menjadi tiga segmen yang sama panjang h = l
/ 3, seperti yang ditunjukkan pada gambar 2. 23, akan ada dua titik interior, i = 1
dan 2, dimana persamaan diferensial dapat ditulis.
Tertulis persamaan. ( 2. 72 ) di i = 1 mengarah ke
? − 2?$+ ? + ?$ = 0 ( 2. 76 )
Dan pada i = 2 diperoleh
Dimana
λ = Pl2/9 EI.
Memanfaatkan kondisi batas dan menata kembali perihal, pers. ( 2. 76 )
dan ( 2. 77 ) dapat ditulis dalam bentuk :
( − 2) ?$+ ? = 0
?$+ ( − 2)? = 0
Persamaan ini linear dan homogen. Dengan demikian mereka memiliki solusi
trivial y1 = y2 = 0 dan solusi trivial yang diperoleh dengan menetapkan penentu
mereka sama dengan nol. Itu adalah,
e − 21 − 2 e = 01 ( 2. 78 )
Mengembangkan Persamaan. (2. 78) mengarah ke
− 4 + 3 = 0 ( 2. 79 )
persamaan polinomial yang akar terkecil adalah beban kritis. Akar persamaan
( 2. 79 ) adalah
$= 1, = 3
Dimana
$
=
+ ;,
=
! ;Oleh karena itu beban kritis adalah
L
=
+ ; ( 2. 80 )Solusi ini berbeda dari beban Euler sebesar 9%. Kesalahan 19% yang ada saat
dikurangi menjadi 9% dengan memenuhi persamaan diferensial pada dua titik
interior.
2. 6. 3 Pendekatan Ketiga n = 4
Jika anggota tersebut dibagi menjadi empat bagian yang sama panjang h =
l / 4, seperti yang ditunjukkan pada gambar 2. 23 akan ada tiga poin interior
dimana persamaan diferensial dapat ditulis.
Gambar 2. 24 Pendekatan dengan n = 4
Namun, dengan mempertimbangkan fakta bahwa modus tekuk kolom sendi sendi
simetris, yaitu, y1 = y3, jumlah persamaan yang harus ditulis dikurangi menjadi
dua. Pada i = 1, persamaan. ( 2. 72 ) mengarah ke
? − 2?$+ ? + $M 9; ?$ = 0 ( 2. 81 )
Dan pada i = 2 diperoleh
Dengan menggunakan kondisi batas dan simetri, persamaan ini dapat ditulis
yang akar terkecil adalah λ = 0,59, karena itu
L
=
+,& ; ( 2. 85 )Jawaban ini berbeda dari beban Euler sebesar 5%.
Dengan terus meningkatkan derajat kebebasan dan memenuhi persamaan
diferensial pada semakin banyak poin, akurasi dari solusi dapat ditingkatkan ke
tingkat yang diinginkan. Namun, proses ini memerlukan solusi dari sejumlah
besar persamaan simultan. Seperti yang ditunjukkan oleh Salvadori, cara yang
lebih cepat dan lebih sederhana untuk meningkatkan akurasi dari solusi yang
diberikan oleh skema ekstrapolasi Richardson.
Hal ini dapat menunjukkan bahwa kesalahan, e, dari solusi perkiraan kira
kira sebanding dengan kuadrat dari ukuran mesh, h. Demikian
h = iℎ ( 2. 86 )
dimana C adalah konstanta. Jika n1 dan n2 adalah jumlah bagian mana anggota
telah dibagi, dan h1 = l / n1dan h2 = l / n2 adalah ukuran mesh yang sesuai, dan
jika β1 dan β2 adalah perkiraan dari solusi yang tepat, β, diperoleh dengan
h$= j − j$= ilk
$
Dan
h = j − j = ilk
Eliminasi C antara hubungan ini mengarah ke
j = :" m"- : m
:"- : ( 2. 87 )
Persamaan ( 2. 87 ) memberikan nilai ekstrapolasi dari solusi memberikan
perkiraan β1 dan β2 mendekati solusi eksak monoton. Hal ini biasanya
memungkinkan terjadinya untuk mendapatkan konvergensi monoton dengan
memilih urutan yang tepat dari n.
Untuk menggambarkan efektivitas skema ekstrapolasi Richardson, hasil
perkiraan yang diperoleh untuk kolom sendi sendi, membiarkan n = 3 dan 4, akan
diganti menjadi persamaan ( 2. 87 ), demikian
j = 9 (9) − 16 (9,4)9 − 16 = 9,85
Dimana
L
=
+,d* ; ( 2. 88 )Solusi ini berbeda dari beban Euler oleh hanya 0,2%.
Setiap solusi perkiraan bersama dengan persentase kesalahan antara itu
dan jawaban yang tepat diberikan dalam tabel 2. 3. Hasil ini menunjukkan bahwa
ekstrapolasi rumus sederhana hanya dengan membagi anggota menjadi jumlah
yang sangat besar dari interval dan dengan memecahkan sejumlah besar
Tabel 2. 3 Ringkasan Solusi Beda Hingga untuk Kolom Sendi sendi
Sumbu utama adalah sumbu yang saling tegak lurus dan akan memberikan
momen inersia, I maksimum dan I minimum pada suatu penampang. Pada
komponen struktur yang mengalami gaya aksial / normal tekan maka
kecendrungannya batang akan tertekuk terhadap sumbu dengan momen inersia
yang paling lemah (minimum). Dengan demikian penentuan sumbu utama dan
momen inersia utama menjadi penting.
Sumbu x dan sumbu y diputar sehingga menjadi sumbu x’ dan sumbu y’
dengan sudut putar sebesar θ. Dengan demikian dapat diperoleh hubungan sebagai
berikut :
x’ = x cos θ + y sin θ
y’ = y cos θ – x sin θ
Ix’ = s ?′ R
Ix’ = s(? cosw − F sin w) R
Ix’ = Ix cos2 θ + Iy sin2 θ – 2 Ixy sin θ cos θ
Iy’ = s F′ R
Iy’ = s(F cosw + ? sin w) R
Iy’ = Iy cos2 θ + Ix sin2 θ – 2 Ixy sin θ cos θ
Ix’y’ = s F′?′ R
Ix’y’ = s(F cosw + ? sin w)(?cosw − F sin w) R Ix’y’ = (Ix – Iy) sin θ cos θ + Ixy (cos2 θ – sin2 θ)
Catatan :
sin 2θ = 2 sin θ cos θ
cos 2θ = cos2 θ – sin2 θ
cos2 θ =
½ + ½ cos 2θ
sin2 θ =
½ ½ cos 2θ
Ix’ = Ix (½ + ½ cos 2θ) + Iy (½ ½ cos 2θ) – Ixy sin 2θ
Ix’ =
½ Ix + ½ Ix cos 2θ + ½ Iy – ½ Iy cos 2θ – Ixy sin 2θ
Dengan cara yang sama dapat ditentukan Iy’ dan Ixy’ sebagai berikut :
Iy’ = % ` 7
−
% - 7 cos 2θ + Ixy sin 2θ ( 2. 90 )Ix’y’ = % - 7 sin 2θ + Ixy cos 2θ ( 2. 91 )
Dari persamaan ( 2. 89 )
Ix’ = % - 7
=
% - 7 cos 2θ – Ixy sin 2θ ( 2. 92 )Persamaan ( 2. 92 ) dan persamaan ( 2. 93 ) masing masing dikuadratkan
kemudian dijumlahkan sehingga diperoleh :
xrF
y−
%` 7z + rF′?′
=x
%- 7z
+ Ixy2( 2. 93 )
Persamaan ( 2. 93 ) adalah persamaan lingkaran dengan bentuk (x a)2 + y2 = r2
Gambar 2. 26 Lingkaran dengan Salib Sumbu Ix’ dan Sumbu Ixy’
Dari gambar 2. 25 di atas dapat ditentukan momen inersia maksimum dan momen
inersia minimum
Imaks = OM = OC + CM
Imin = ON = OC – CM
Sehingga :
Imin = % ` 7
−
%- 7+ rF?
Pada saat terjadi Imaks dan Imin maka Ix’y’ = 0, sehingga dari Persamaan
( 2. 92 ) diperoleh :
% ` 7
sin 2θ + Ixy cos 2θ = 0