BAB II
DASAR TEORI
2.1 Motor Induksi Tiga Phasa
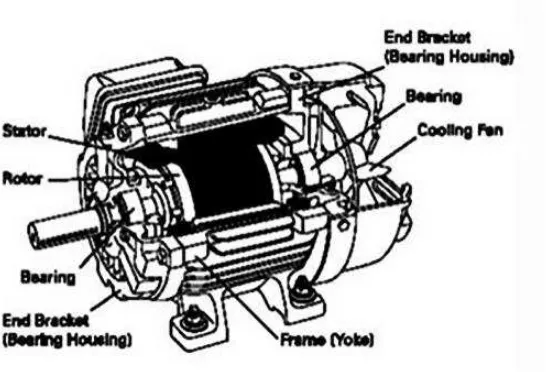
Secara umum, motor 3 fasa memiliki dua bagian pokok, yakni stator dan rotor. Bagian tersebut dipisahkan oleh celah udara yang sempit atau yang biasa disebut dengan air gap. Jarak antara stator dan rotor yang terpisah oleh air gap sekitar 0,4 milimeter sampai 4 milimeter[1].
Terdapat dua tipe motor 3 fasa jika dilihat dari lilitan pada rotornya, yakni
rotor belitan (wound rotor) dan rotor sangkar tupai (squirrel-cage rotor). Motor 3
fasa rotor belitan (wound rotor) adalah tipe motor induksi yang lilitan rotor dan
statornya terbuat dari bahan yang sama.
Gambar 2.1 Motor induksi tiga phasa
Sedangkan motor 3 fasa rotor sangkar tupai (squirrel-cage rotor) adalah tipe motor
induksi yang konstruksi rotornya tersusun dari beberapa batangan logam yang
bagiannya disatukan oleh cincin. Akibat dari penyatuan tersebut, terjadi hubungan
singkat antara batangan logam dengan batangan logam yang lainnya.[5]
Prinsip kerja dari motor listrik 3 fasa ini sebenarnya sangat sederhana. Bila
sumber tegangan 3 fase dialirkan pada kumparan stator, maka akan timbul medan
putar dengan kecepatan tertentu. Besarnya kecepatan tersebut dapat diukur
menggunakan sebuah rumus sebagai berikut:
ns = �
...
(2.1)Dimana :
ns = Kecepatan medan putar stator
f = Frekuensi sistem
P = Kutub Motor
Perlu diketahui bahwa medan putar stator akan memotong batang konduktor yang ada pada rotor, sehingga pada batang konduktor dari rotor akan muncul GGL induksi. GGL akan menghasilkan arus (I) serta gaya (F) pada rotor. Agar GGL induksi timbul, diperlukan perbedaan antara kecepatan medan putar yang ada pada stator (ns) dengan kecepatan berputar yang ada pada rotor (nr).
Perbedaan kecepatan antara stator dan rotor disebut slip (s) yang dapat dinyatakan dengan rumus s= (ns - nr) / ns. Apabila nr = ns, maka GGL induksi tidak
Pada motor induksi besar torsi sangat dipengaruhi resistansi maupun impedansi pada rotor , hal ini dapat dilihat dari persamaan berikut:
Pout =
� . .
...
(2.2)Pin =
� . .
= � . �
...
(2.3)T = . �
� .
=
. � ..
� .
...
(2.4)2.2 Harmonisa
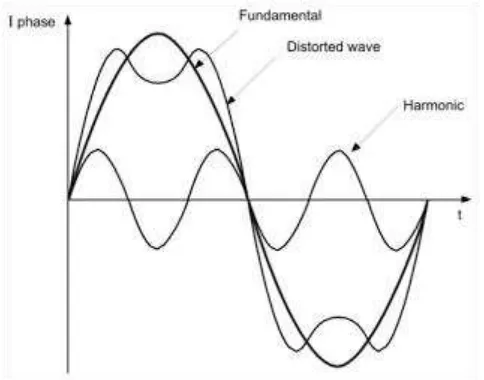
Harmonisa adalah suatu gelombang sinusoidal tegangan atau arus yang berfrekuensi tinggi dimana frekuensinya merupakan kelipatan di luar bilangan satu terhadap frekuensi fundamental (Frekuensi 50 Hz). Nilai frekuensi dari gelombang harmonisa yang terbentuk merupakan hasil kali antara frekuensi fundamental dan bilangan harmonisanya. Bentuk gelombang yang terdistorsi merupakan penjumlahan dari gelombang fundamental dan gelombang harmonisa pada frekuensi kelipatannya. Makin banyak gelombang harmonisa yang diikutsertakan pada gelombang fundamentalnya, maka gelombang semakin akan mendekati gelombang persegi atau gelombang akan berbentuk non sinusoidal. Jika frekuensi fundamental suatu sistem tenaga listrik adalah f0 (50 Hz) maka frekuensi harmonisa
orde ke n adalah n.f0
frekuensi harmonisa ke-3 mempunyai frekuensi 150 Hz atau dapat dituliskan dengan persamaan:
fn = n x f0 ...(2.5)
Dimana : n adalah bilangan bulat positif f0 adalah frekuensi fundamental
Jika gelombang tegangan fundamental dijumlahkan dengan harmonisa ke -3 akan diperoleh bentuk gelombang tegangan sinusoidal, seperti ditunjukkan pada gambar di bawah ini
Gambar 2.2 Gelombang tegangan fundamental, harmonisa ke-3, dan hasil penjumlahannya
Karakteristik Harmonisa dapat direpresentasikan dengan deret fourier yang dapat dinyatakan dalam bentuk:
Deret Fourier dapat diaplikasikan untuk persamaan tegangan dan arus harmonisa sebagai berikut:
v(t) = V0 + ∑∞= √ sin �0t +�n) ...(2.7)
i(t) = I0 + ∑∞= √ sin �0t +�n) ...(2.8)
Bagian DC (V0 dan I0) biasanya diabaikan untuk menyederhanakan perhitungan,
sedangkan Vn dan In adalah nialai RMS untuk harmonisa orde ke-n pada masing-masing tegangan dan arus.
2.3Batasan Harmonisa
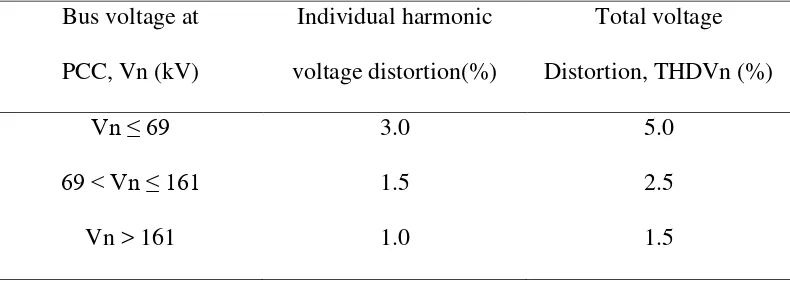
Standar IEEE 519-1992 menyediakan petunjuk untuk level tegangan terdistorsi harmonisa yang diperbolehkan pada sistem. Tabel 2.1 menunjukkan standar IEEE 519-1992.
Tabel 2.1 Harmonic Voltage Distortion Limits in Percent of Nominal Fundamental Frequency Voltage
Bus voltage at PCC, Vn (kV)
Individual harmonic voltage distortion(%)
Total voltage Distortion, THDVn (%)
Vn ≤ 69
69 < Vn ≤ 161
Vn > 161
3.0 1.5 1.0
5.0 2.5 1.5
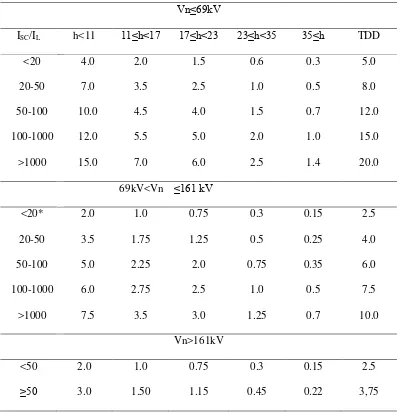
Tabel 2.2 Harmonic Current Distortion Limits (Ih) in percent of IL
2.4 Harmonisa Pada Motor Induksi 3 Phasa
Menurut Electric Power Institute (EPRI) memperkirakan bahwa di atas tahun 2000,
50% sampai 70% dari semua beban diperkirakan adalah non linear[2]. Beban non linear
merupakan sumber terciptanya harmonisa. Pada motor Induksi, Harmonisa dapat
mengakibatkan pemnasan, mengurangi efisiensi, dan peningkatan rugi-rugi inti dan
tembaga pada kumparan rotor dan stator.
It = √ + ∑∞ℎ= ℎ
...
(2.9)THDi =
√ ∑∞ℎ= �ℎ
�
...
(2.10)Dimana : It = Arus total = Arus terdistorsi efektif(rms) THDi = Total Harmonic Distortion arus h = Orde Harmonisa
= Arus Komponen fundamental ℎ = Arus harmonisa orde ke-h
Pada persamaan (2) dapat di lihat bahwa nilai Ir yang merupakan arus fundamental akan mengalami perubahan setelah terdistorsi harmonisa menjadi It (Arus terdistorsi efektif(rms)), perubahan nilai ini memperbesar nilai � yang menambah panas mesin.
Motor dapat terinfeksi secara signifikan oleh distorsi tegangan harmonisa. Distorsi tegangan harmonisa pada terminal motor diubah menjadi fluksi harmonisa pada motor. Fluksi harmonisa tidak secara signifikan mempengaruhi torsi motor, tetapi rotasi pada frekuensi berbeda daripada frekuensi rotor sinkron, secara umum menginduksi arus frekuensi tinggi di rotor. Effek pada motor sama dengan arus urutan negatif pada frekuensi fundamental.
2.5 Filter Pasif
dan untuk melemahkan/membuang ke ground tegangan output pada frekuensi tertentu yang tidak diiginkan. Filter dalam elektronika dibagi dalam dua kelompok yaitu filter pasif dan filter aktif. Untuk membuat suatu filter pasif dapat digunakan komponen pasif (R, L, C). Sedangkan untuk membuat filter aktif diperlukan rangkaian (R, L, C dan transistor atau Op-Amp).
Pada dasarnya filter pasif maupun filter aktif dapat dikelompokan berdasarkan respon frekuensi yang di saring (filter) menjadi 4 kelompok.
Filter Lolos Bawah (Low Pass Filter, LPF) Filter Lolos Atas (High Pass Filter, HPF) Filter Lolos Rentang (Band Pass Filter, BPF)
Filter Tolak Rentang (Band Stop Filter atau Notch Filter)
Untuk membuat filter pad kelompok diatas dapat digunakan konfigurasi R dan C, L dan C atau RLC. Akan tetapi penggunaan induktor sering dihindari karena fisik induktor yang besar. Sehingga pada umumnya filter yang sering dijumpai adalah filter RC saja.
Filterpasif secara ekonomi relatif murah dibandingkan dengan metoda lain untuk meredam distorsi harmonisa. Bagaimanapun, mereka mempunyai kelemahan atau kerugian karena berpotensi saling berinteraksi dengan sistem tenaga, dan penting sekali untuk menganalisa semua interaksi sistem yang mungkin terjadi saat mereka dirancang. Filter pasif bekerja sangat efisien bila filtertersebut dipasang dilokasi pembangkit harmonisa (beban non linier).
mempertimbangkan perkembangan sumber arus harmonisa atau konfigurasi dari beban sebab akan menyebabkan beban lebih yang L dapat berkembang menjadi panas yang berlebihan. Perancangan filter pasif memerlukan suatu pengetahuan yang tepat dari beban pembangkit harmonisa pada sistem tenaga. Banyak simulasi yang dilakukan untuk menguji kriteria di bawah kondisi beban yang berubah sesuai topologi jaringan tersebut.
1. Double tuned filter adalah filter harmonisa yang terdiri 2 buah single tunedfilter
yang digunakan untuk mengurangi harmonisa 2 buah orde harmonisa diantara orde harmonisa yang ada. Didalam perhitungan penentuan nilai L dan C mengacu pada 2 buah orde harmonisa tersebut.
2. Third-orde filter adalah jenis filter high pass yang digunakan hanya melewatkan frekuensi diatas frekuensi cut-off juga. Third-orde high-pass filter adalah filterfrekuensi tinggi yang lebih efektif dalam mem-filter, tetapi memiliki rugi-rugi daya yang lebih besar dibanding second-orde high-pass filter.
Filterpasif selalu menyediakan kompensasi daya reaktif sampai batas tertentu sesuai besar Volt-Ampere dan tegangan dari bank kapasitor yang digunakan, mereka dapat dirancang untuk dua tujuan yaitu sebagai filter dan kompensasi faktor daya yang diinginkan. Jika saringan lebih dari satu digunakan sebagai contoh, sebuah double tuned filter untuk harmonisa ke 5 dan sebuah lagi untuk harmonisa ke 7, atau harmonisa ke 11 dan ke 13. yang terpenting yang perlu diingat bahwa
Filterpasif merupakan suatu kombinasi rangkaian seri sebuah induktansi dan sebuah kapasitansi. Pada kenyataannya, tidak ada sebuah resistor yang secara fisik dipasang, tapi dalam perhitungan resistor selalu ada dalam rangkaian seri, tahanan dalam dari reaktor yang terhubung secara seri terkadang menimbulkan panas yang berlebih pada filter. Semua arus harmonisa pada frekuensi bersamaan dengan tuned filter akan didapat impedansi rendah yang melalui filter tersebut.
2.6 Filter Doubl e T uned
Double tuned passive filter mempunyai nilai impedamsi yang kecil jika frekuensinya besar. Sehingga filter ini harus mempertimbangkan parameter kaitannya dengan frekuensi harmonisa. Bebarapa aspek berkaitan dengan factor kualitas pada single tuned filter yaitu:
1. Tahanan R pada filter harmonisa single tuned filter adalah nilai tahanan dari kumparan reaktor.
2. Tahanan R dapat juga digunakan untuk setiap faktor kualitas dari filter dan menyediakan suatu cara untuk mengendalikan jumlah arus harmonisa yang diinginkan yang melaluinya
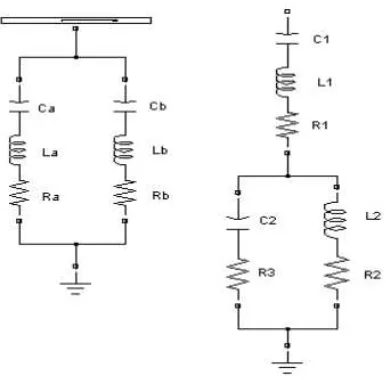
Gambar 2.3 Double tuned passive filter
Kelebihan dari double tuned passive filter yaitu:
1. Terjadi resonansi pada impedansi yang sangat rendah. 2. Sangat effisien pada daerah frekuensi yang sempit.
3. Single tuned filter secara normal mampu mengeliminasi frekuensi harmonisa yang paling besar yaitu harmonisa ke 11 dan 13.
4. Lebih sensitif terhadap tuning yang tidak tepat.
5. Dengan memberikan kapasitor utama yang besar maka kerja filter lebih optimal dan menurunkan biaya kVAR.
6. Double tuned filter merupakan model filter yang sederhana, dengan kriteria yang baik.
Kelemahan dari double tuned passive filter yaitu:
1. Membutuhkan kVAR yang tinggi untuk mencapai performance yang sama seperti single tuned filter.
2.7 Merancang Double T une d Passiv e Fi lte r
Dalam merancang filter pasif Double tuned kita harus menentukan nilai-nilai dari setiap komponen RLC yang digunakan.
1. Menentukan nilai kapasitansi ∆Q untuk memperbaiki faktor daya, perbaikan faktor daya umumnya berkisar antara 0.95 -0.99.
∆Q = P(tanθa wa l – tanθt a r g et)
...
(2.11)2. Menghitung reaktansi kapasitor pada frekuensi fundamental yaitu:
XC1 =
�
∆Q
...
(2.12)Maka nilai C1 adalah:
C1 =
���
...
(2.13)Selanjutnya daya reaktif Qc dibagi untuk orde 3 dan orde 5 yaitu Qa dan Qb dengan demikian nilai reaktansi masing-masing orde harmonisa menjadi:
Xca = �
∆Q
...
(2.14)Xcb = �
∆Q
...
(2.15)Maka nilai kapasitor Ca, Cb adalah: Ca =
���
...
(2.16)Cb =
���
...
(2.17)C1 = Ca+Cb
...
(2.18)3. Menghitung nilai reaktor yang digunakan untuk meredam harmonisa ke-n
XL =
...
(2.19)Dengan demikian nilai XL untuk orde 3 (Xla) dan orde 5 (XLb) masing-masing yaitu:
XLa =
...
(2.20)XLb =
...
(2.21)Nilai induktansi masing-masing orde harmonisa yaitu:
La =
��
��
...
(2.22)Lb =
��
��
...
(2.23)Sehingga L1 =
� .�
� +�
...
(2.24)4. Menghitung tahanan reaktor untuk menentukan nilai faktor kualitas Q dimana:
R = �
...
(2.25)Ra = �.�. .�