TUGAS
KECERDASAN BUATAN (AI)
Oleh:
MUSTARI (141041020070)
PROGRAM STUDI TEKNIK INFORMATIKA
UNVERSITAS U’BUDIAH INDONESIA BANDA ACEH
1. JARINGAN SARAF TIRUAN
a. Sejarah
Saraf tiruan diperkenalkan secara sederhana pada tahun 1943 oleh McCulloch dan Pitts [Fausett; 1994]. Pada saat itu McCulloch dan Pitts melalui beberapa komputasi
menggunakan neuron-neuron sederhana dapat mengubahnya menjadi sebuah sistem baru
(disebut sistem neural) yang mempunya kemampuan komputasi yang lebih baik. Selain itu
McCulloch dan Pitts juga mengusulkan pemberian bobot dalam jaringan yang dapat diatur
untuk melakukan fungsi logika sederhana. Beliau-beliau ini menggunakan semacam fungsi
aktivasi threshold.
Pada tahun 1958, Rosenblatt beserta Minsky dan Papert mulai mengembangkan
model jaringan yang disebut dengan perceptron. Dalam model ini mereka mencoba untuk
mengoptimalkan hasil iterasinya. Kemudian pada tahun 1960 Widrow dan Hoff
mengembangkan model perceptron ini dengan memperkenalkan aturan pelatihan jaringan
yang disebut aturan delta (sering juga disebut kuadrat rata-rata terkecil). Aturan tersebut
akan mengubah bobot perceptron apabila keluaran yang dihasilkan tidak lagi sesuai dengan
target yang telah ditetapkan. Hal inilah yang menyebabkan komputer dapat “belajar” dengan sendirinya; kecepatan belajar dapat diatur dengan menggunakan parameter tertentu.
Perkembangan selanjutnya dibuat oleh Rumelhart (1986) dengan mencoba
mengembangkan sistem layar tunggal (single layer) pada perceptron menjadi sistem layar
jamak (multilayers), yang kemudian disebut dengan sistem backpropagation. Setelah itu,
muncul beberapa model jaringan saraf tiruan lain yang dikembangkan oleh Kohonen (1972),
Hopfield (1982), dan lain-lain.
b. Penemu
Mulai dari ditemukannya, jaringan syaraf tiruan telah mengalami tahap – tahap perkembangan, antara lain :
- Pada tahun 1940 an, para ilmuwan menemukan bahwa psikologi dari otak sama dengan
mode pemrosesan yang dilakukan oleh peralatan computer.
- Pada tahun 1943, McCulloch dan Pitts merancang model formal yang
pertama kali sebagai perhitungan dasar neuron.
- Pada tahun 1949, Hebb menyatakan bahwa informasi dapat disimpan
- koneksi dan mengusulkan adanya skema pembelajaran untuk memperbaiki
koneksi-koneksi antar neuron tersebut.
- Pada tahun 1954, Farley dan Clark mensetup model-model untuk relasi adaptif stimulus
respon dalam jaringan random.
- Pada tahun 1958, Rosenblatt mengembangkan kosep dasar tentang perceptron untuk
klasifikasi pola.
- Pada tahun 1960, Widrow dan Hoff mengembangkan ADALINE untuk kendali adaptif
dan pencocokan pola yang dilatih dengan aturan pembelajaran Least Mean Square(LMS).
- Pada tahun 1974, Werbos memperkenalkan algoritma backpropagation untuk melatih
perceptron dengan banyak lapisan.
- Pada tahun 1975, Little dan Shaw menggambarkan jaringan syaraf dengan menggunakan
model probabilistik.
- Pada tahun 1982, Kohonen mengembangkan metode pembelajaran jaringan syaraf yang
tidak terawasi (unsupervised learning) untuk pemetaan.
- Pada tahun 1982, Grossberg mengembangkan teori jaringan yang diinspirasi oleh
perkembangan psikologi. Bersama Carpenter, mereka mengenalkan sejumlah arsitektur
jaringan, antara lain: Adaptive Resonance Theory (ART), ART2, dan ART3.
- Pada tahun 1982, Hopfield mengembangkan jaringan syaraf recurrent yang dapat
digunakan untuk menyimpan informasi dan optimasi.
- Pada tahun 1985, algoritma pembelajaran dengan menggunakan mesin Boltzmann yang
menggunakan model jaringan syaraf probabilistik mulai dikembangkan.
- Pada tahun 1987, Kosko mengembangkan jaringan Adaptive Bidirectional Associative
Memory(BAM).
- Pada tahun 1988, mulai dikembangkan fungsi radial.
c. Aplikasi Jaringan Saraf Tiruan Aerospace
Autopilot pesawat terbang, simulasi jalur penerbangan, sistem kendali
pesawat, perbaikan autopilot, simulasi komponen pesawat. Otomotif
Sistem kendali otomatis mobil. Keuangan dan perbankan
Pendeteksian uang palsu, evaluator aplikasi kredit, pengidentifikasian pola-
Pertahanan (Militer)
Pengendali senjata, pendeteksi bom, penelusuran target, pembedaan objek,
pengendali sensor, sonar, radar, dan pengolahan sinyal citra yang meliputi kompresi
data, ekstraksi bagian istimewa, dan penghilangan derau, pengenalan sinyal atau citra. Elektronik
Pembuatan perangkat keras yang bisa mengimplementasikan JST secara efisien,
machine vision, pengontrol gerakan dan penglihatan robot, sintesis suara. Broadcast
Pencarian klip berita melalui pengenalan wajah. Keamanan
JST digunakan untuk mengenali mobil dan mengenali wajah oknum. Medis
Analisis sel kanker payudara, pendeteksian kanker kulit dll. Pengenalan suara
Pengenalan percakapan, klasifikasi suara. Pengenalan tulisan
Pengenalan tulisan tangan, penerjemahan tulisan ke dalam tulisan latin. Matematika
Alat pemodelan adalah dimana bentuk eksplisit dari hubungan antara
variabel-variabel tertentu tidak diketahui. Pengenalan benda bergerak
Selain pola dari citra diam, JST juga bisa digunakan untuk mendeteksi citra bergerak
dari video seperti citra orang yang bergerak, dll.
JST digunakan sebagai detektor virus komputer, penginderaan bau, dll
d. Perkembangan Jaringan Saraf Tiruan
Jaringan syaraf tiruan adalah algoritma penyelesaian masalah komputasi yang prinsip kerjanya menirukan jaringan syaraf manusia. Struktur jaringan syaraf tiruan terdiri
dari pemroses berupa neuron dan penghubung antar neuron. Meniru analogi jaringan syaraf
manusia, jaringan syaraf tiruan terdiri dari interkoneksi beberapa lapisan neuron mulai dari
neuron input sampai neuron output. Neuron input berfungsi untuk menerima masukan yang
selanjutnya akan diproses dalam layer berikutnya. Masukan sering kali harus dibuat
Pada proses pengolahan masukan di JST akan terjadi proses perkalian, penjumlahan dan
penerapan fungsi aktifasi terhadap masukan sebuah node.
Jaringan syarat tiruan dimanfaatkan untuk penyelesaian berbagai permasalahan. Ada
beberapa pendapat yang menyatakan bahwa jaringan syaraf tiruan kurang mempunyai
keunggulan dalam penyelesaian berbagai masalah. Namun kenyataannya jaringan syarat
tiruan telah banyak digunakan dan menyelesaikan masalah di berbagai bidang.
Perkembangan algoritma jaringan syaraf tiruan memang cukup pesat dan terdapat wadah
khusus pada IEEE yang menerbitkan jurnal international transaction on neural network. Jika
kita mencari kata neural network di IEEE explore maka akan kita temukan puluhan ribu
artikel yang menggunakan algoritma jaringan syaraf tiruan untuk berbagai keperluan.
Dengan jaringan syaraf tiruan kita tidak perlu mengetahui persamaan hubungan input
dan output dari sistem yang ingin dicari solusinya. Misalkan untuk pengenalan huruf maka
yang perlu dipikirkan adalah apa yang akan dijadikan masukan jaringan, bagaimana struktur
jaringan dan pelatihannya dan apa keluaran jaringan. Kita tidak perlu memikirkan relasi
matematik antara masukan dan keluaran. Jaringan syaraf tiruan mampu memodelkan
hubungan linier maupun tidak linier.
Jaringan syarat tiruan sering digunakan untuk memprediksi volume penjualan suatu
produk, mengatur proses industri dan berbagai keperluan riset tentang konsumen. Berbagai
aplikasi lain dapat kita temui di Industri dalam hal manajemen resiko, pengelolaan aset dan
keperluan lainnya. Dalam bidang medik juga dapat kita jumpai berbagai penelitian tentang
modeleng dan deteksi kelainan jantung maupun organ-organ lain melalui pemrosesan
terhadap isyarat yang berupa suara, gambar ataupun data-data yang lain.
Dalam studi elektromagnetik, beberapa peneliti juga mencoba menerapkannya dalam
modelling maupun invers modelling. Modelling terhadap komponen rf dan microwave aktif
dan pasif juga pernah dipublikasikan dalam jurnal ilmiah. Masih di bidang elektromagnetik
terkait dengan karakteriksasi material. JST juga pernah diterapkan untuk rekonstruksi
karakteristik elektrik dan magnetik suatu material.
Berbagai teknologi dan produk yang bermanfaat juga telah banyak dihasilkan dan
derasal dari riset dengan menggunakan algoritma jaringan syaraf tiruan.Pusat-pusat riset di
luar negeri memang banyak yang mempunyai hubungan harmonis dengan industri sehingga
industri banyak yang tertarik untuk mengembangkan suatu prototipe dari laboratorium
menjadi suatu produk yang berguna. Penelitian memang selayaknya tidak hanya berujung
2. ALGORITMA GENETIC
a. Sejarah dan Penemu
Algoritma genetik merupakan suatu metode yang menggunakan seleksi alam yang
merupakan bagian utama dari prinsip evolusi sebagai dasar pemikiran untuk menyelesaikan
suatu permasalahan. Prinsip ini dikemukakan oleh Charles Darwin, dimana tanpa
menghiraukan prinsip dasar penurunan sifat, Darwin mengemukakan penggabungan kualitas
induk pada generasi berikutnya, disamping itu bahwa individu yang mampu beradaptasi
dengan lingkunganya akan mempunyai kesempatan hidup yang lebih besar.
Algoritma Genetik pertama kali dikembangkan oleh John Holland pada tahun 1970-an
di New York, Amerika Serikat. Dia beserta murid-murid dan teman kerjanya menghasilkan
buku berjudul "Adaption in Natural and Artificial Systems" pada tahun 1975.
Algoritma Genetik khususnya diterapkan sebagai simulasi komputer dimana sebuah
populasi representasi abstrak (disebut kromosom) dari solusi-solusi calon (disebut individual)
pada sebuah masalah optimisasi akan berkembang menjadi solusi-solusi yang lebih baik.
Secara tradisional, solusi-solusi dilambangkan dalam biner sebagai string '0' dan '1',
walaupun dimungkinkan juga penggunaan penyandian (encoding) yang berbeda. Evolusi
dimulai dari sebuah populasi individual acak yang lengkap dan terjadi dalam
generasi-generasi. Dalam tiap generasi, kemampuan keseluruhan populasi dievaluasi, kemudian
multiple individuals dipilih dari populasi sekarang (current) tersebut secara stochastic
(berdasarkan kemampuan mereka), lalu dimodifikasi (melalui mutasi atau rekombinasi)
menjadi bentuk populasi baru yang menjadi populasi sekarang (current) pada iterasi
berikutnya dari algoritma.
b. Aplikasi Algoritma genetic
Mencari rute terpendek dari suatu lokasi ke lokasi lain. Dalam aplikasi ini didisain juga suatu program yang berjalan di PC dengan tujuan untuk membuat peta jalan dan
mendownload ke mikrokontroler semua informasi yang dibutuhkan antara lain informasi peta
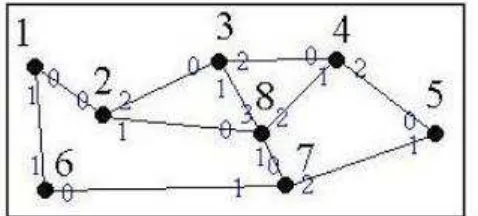
Gambar 1. Contoh peta jalan yang diimplementasikan
Titik-titik pada peta menunjukkan lokasi - lokasi yang ada. Setiap titik mempunyai
cabang - cabang yang menghubungkan titik tersebut dengan titik yang lain. Jarak antar titik
telah didefinisikan terdahulu. Dalam sistem ini dibatasi setiap titik maksimum mempunyai 4
cabang. Setiap cabang dalam satu titik akan diberi nomor. Sebagai contoh pada peta dalam
gambar 1, titik 1 mempunyai 2 cabang dan diberi nomor 0 dan 1. Cabang 0 menghubungkan
titik 1 dengan titik 2 sedangkan cabang 1 menghubungkan titik 1 dengan titik 6.
Panjang kromosom (dalam bit) dapat dihitung dengan menggunakan persamaan berikut :
P = C x ( T – 1 ) ... 3
Dimana C adalah jumlah bit binary dari jumlah percabangan terbanyak dan T adalah jumlah
titik.
Pada gambar 1 ada 8 titik dan jumlah percabangan terbanyak adalah 4 cabang (membutuhkan
2 bit binary) maka dengan menggunakan persamaan 1 didapatkan panjang kromosomnya 14
bit. Setiap kromosom mengandung infomasi rute dari satu titik ke titik yang lain. Bit-bit
dalam kromosom menunjukkan nomor cabang pada titik-titik yang ada. Bila nomor cabang
tidak ada maka dilakukan perulangan. Untuk lebih jelas lihat contoh berikut yang
menggunakan peta seperti pada gambar 1.
Start awal = titik 1
Kromosom = 01 00 11 10 00 11 10 = 14 bit
c. Pengembangan Algoritma Genetika
Algoritma genetika adalah algoritma heuristik adaptif yang memiliki dasar pemikiran
atau gagasan evolusioner untuk proses seleksi alami dan genetika. Konsep dasar dari
algoritma genetika dirancang untuk menirukan proses di dalam sistem alami yang penting
bagi evolusi makhluk hidup untuk dapat terus bertahan hidup, yang secara rinci teori ini
dicetuskan oleh Charles Darwin yaitu “Survival of the Fittest”. Dengan menirukan teori dari
Charles Darwin, algoritma genetika dapat digunakan untuk mencari solusi dari segala macam
permasalahan dalam ilmu pengetahuan seperti dalam mencari solusi penjadwalan job shop.
Pelopor pertama penggunaan metode algoritma genetika adalah John Holland pada
tahun 60-an. Algoritma genetika menggunakan analogi seleksi alam yang bekerja dari suatu
populasi yang terdiri dari berbagai individu (gen), yang masing-masing individu
mempresentasikan suatu solusi yang mungkin muncul dari persoalan yang dihadapi. Dalam
hal ini, individu yang terpilih dilambangkan dengan sebuah nilai fitness yang digunakan
untuk mencari solusi terbaik dari persoalan yang ada. Siklus Algoritma Genetik Siklus dari
algoritma genetika pertama kali dikenalkan oleh David Goldberg. Siklus ini diperbaiki oleh
beberapa ilmuwan yang mengembangkan algoritma genetik, yaitu Zbigniew Michalewicz
dengan menambahkan operator elitism dan membalik proses seleksi setelah proses
reproduksi.
3. ROBOTIK
a. Sejarah dan Penemu
Kata robot diambil dari kata yang berasal dari kata robota, yang mempunyai arti
pekerja, dipopulerkan oleh Isaac Asimov pada tahun 1950 dalam sebuah karya fiksinya.
Robot biasanya digunakan untuk tugas berat, bahaya, pekerjaan berulang dan kotor. Biasanya
menunjuk robot industri digunakan dalam garis produksi. Penggunaan lainnya termasuk
pembersihan limbah beracun, penjelajahan bawah air dan luar angkasa, pertambangan, cari
dan tolong, dan pencarian tambang. Belakangan ini robot mulai memasuki pasaran konsumen
di bidang hiburan, penyedot debu, dan pendeteksi kebocoran gas.
Robot pertama kali dikembangkan oleh Computer Aided Manufacturing-International
(CAM-1), “ Robot adalah peralatan yang mampu melakukan fungsi-fungsi yang biasa dilakukan oleh manusia, atau peralatan yang mampu bekerja dengan intelegensi yang mirip
dengan manusia”. Definisi kedua, dikembangkan oleh Robotics Institute of America (RIA), perkumpulan pembuat robot yang lebih menitikberatkan terhadap kemampuan nyata yang
Robot adalah peralatan manipulator yang mampu diprogram, mempunyai berbagai
fungsi, yang dirancang untuk memindahkan barang, komponen-komponen, peralatan, atau
alat-alat khusus, melalui berbagai gerakan terprogram untuk pelaksanaan berbagai pekerjaan.
Secara mendasar, robot memilik banyak hal yang sama dengan otomasi internal, mereka
memanfaatkan piranti tenaga yangserupa (seperti listrik, hidraulik, atau pneumatik) dan
mereka dikendalikan melalui urutan-urutan yang telah dikendalikan melalui program, yang
memungkinkan mesin tersebut pada posisi yang diinginkan. Lingkungan seperti ini
didefinisikan sebagai lingkungan Dalam perkembangan mesin yang terotomatisasi ini akan
menjadi bermacam-macam spesifikasi tergantung kebutuhan aktifitas manusia terhadap
otomatisasi industri dan robotika.
Robotika merupakan bidang dinamis yang perkembangannya maju pesat.
Perkembangan ini selain melibatkan komputasi, permesinan danelektronika juga menyangkut
perkembangan teknologi terapan. Penelitian dibidang terakhir ini biasanya berakar dari
industri, untuk memecahkan masalah industri dengan teknologi yang ada. Misalnya adalah
pengembangan perangkat lunak untuk mendapatkan algoritma baru bagi pengendalian robot,
pengembangan sistem penglihatan dengan sistem resolusi yang lebih tinggi, perbaikan
kemampuan sensor dan pengembangan protokol komunikasi untuk komunikasi dengan
komputer dan peralatan pabrikSehingga robot diasmsikan sebagai gabungan antara perangkat
mekanik dan perangkat elektronik yang berfungsi untuk menggantikan pekerjaan manusia
yang beresiko tinggi, seperti pekerjaan pada temperatur yang tinggi, zat kimia, ruang hampa
udara, dan pada kondisi yang tidak mungkin dikerjakan oleh manusia. Ada juga robot sebagai
alat hiburan dan ada pula robotyang bertugas untuk menggantikan pekerjaan yang menuntut
keahlian (accurary), kecepatan dan lain-lain. Ada pula robot yang berfungsi untuk
mengerjakan pekerjaan yang rutin seperti robot pada pemintalan benang. Pada bidang
pertahanan keamanan (Hankam), robot digunakan sebagai penjinak bom. Saat ini robot
dikembangkan agar dapat berpikir sendiri dengan logika-logika yang telah ditanamkan pada
b. Aplikasi Robotik
o Aplikasi Memotong (Deburring)
Robot adalah alat yang sempurna untuk pekerjaan memotong banyak. Laser, plasma
dan pemotong air jet sering digunakan dengan robot. Karena sifat berbahaya dari teknologi
robot ini adalah pilihan yang jelas. Biasanya alat pemotong ditempatkan pada robot dan
bagian ini disajikan untuk robot dengan konveyor, meja putar atau manipulator. Sebuah
pilihan kedua adalah untuk memiliki robot memegang bagian dan memindahkannya
sementara alat pemotong adalah tetap.
o De-burring, Grinding, Poles, Linishing dan Finishing :
Dengan menggunakan fleksibilitas 6-sumbu robot adalah memungkinkan untuk
menggurinda, trim, fettle, memoles dan bahkan membersihkan hampir setiap bagian, dalam
material apapun dan mencapai finish yang sangat baik konsisten. Robot teknologi
memungkinkan sejumlah besar program yang berbeda dan karenanya bagian yang akan
disesuaikan oleh satu instalasi. Seperti Pemotongan ada dua pendekatan utama, baik robot
memegang sebagian atau robot memegang alat. Juga dimungkinkan untuk memiliki dua robot
bekerja sama untuk fleksibilitas: satu memegang bagian, yang memegang alat.
o Tekuk / Bending
Menekuk plat dengan system yang sudah diintergasi dengan robot dan mesin press.
o Handling
Karena array besar teknologi yang tersedia dan melalui pengalaman bertahun-tahun,
kami dapat menawarkan solusi untuk aplikasi penanganan paling. Dengan menggunakan
kedua sistem terbukti dari produsen spesialis dan produk pesanan kami dapat memenuhi
kebutuhan Anda. Robot tidak hanya kekuatan dan kecepatan, tetapi juga ketangkasan akurasi
dan sensitivitas. Mereka secara teratur digunakan dalam berbagai industri untuk manipulasi
sejumlah besar item dari pintu mobil sampai ke telur, dari mata air sampai untuk sampanye.
Sebuah robot besar yang khas akan mampu menangani beban 120kg pada kecepatan 2500
c. Perkembangan Robotik
Dalam perkembangan robot dunia, Negara Jepang lah yang lebih menonjol tentang
robotika di bandingkan negara lain. Rrobot di Jepang telah ada sejak zaman Edo[1603-1867]
yaitu sebuah boneka mekanik yang dikenal sebagai Karakuri Ningyo. Robot mulai
benar-benar dikembangkan di Jepang sejak tahun 1973,oleh Professor Ichiro Kato dari universitas
Waseda. Dan pada masa jepang merupakan negara yang selalu memiliki inovasi – inovasi baru tentang teknologi robot. Salah satu robot dari jepang yang populer adalah ASIMO, robot
humanoid yang di ciptakan oleh Honda Motor Company. Menyerupai astronot kecil yang
membawa backpack dan bisa berjalan di atas dua kaki dengan kecepetan 6km/jam. Secara
resmi, nama Asimo merupakan akronim dari advance Step in Innovative Mobility. Selain
ASIMO, jepang juga mempunyai robot yang tampilanya menyerupai manusia, namanya yaitu
Actroid dimana robot ini bisa berekspresi layaknya manusia.
Selain jepang banyak negara – negara di eropa dan amerika yang menciptakan berbagai jenis robot, diantaranya Robotcar, Mobil Tanpa Sopir yang di kembangkan oleh
Oxford University. Sebelumnya sudah ada robotcar yang sejenis yang di buat oleh
perusahaan ternama yaitu google. Ada juga robot WILDCAT yaitu robot yang memiliki
empat kaki yang dapat berjalan dan berlari layaknya cheetah, robot tersebut dapat berlari
dengan kecepatan 16 mph dan di kendalikan sepenuhnya secara wireless. Selain dua robot
tersebut ada juga robot hewan yang mempunyai ukuran yang cukup kecil dan sama dengan
ukuran hewan aslinya diantaranya yaitu BionicOpter Dragonfly adalah Robot Capung Unik
Buatan Festo yang dapat terbang layaknya capung sungguhan dan T8 Spiderbot, Robot T8
Spiderbot ini diciptakan dengan meniru cara laba-laba bergerak dengan menggunakan basis
robot hexapod atau robot dengan delapan kaki. Robot T8 Spiderbot ini diciptakan oleh
Robugtix , bodi atau badan robot T8 Spiderbot ini dicetak menggunakan teknologi printer
3D.
Ada juga rumah RV RUMAH ROBOT MASA DEPAN yaitu Greg Lynn, ia berhasil
membuat sebuah desain prototype rumah RV atau rumah kendaraan robot yang memiliki
ukuran skala 1/5 dari rumah normal manusia. Struktur bangunan rumah robot ini
meningkatkan ruang hidup dengan memutar sumbu yang berada dibawah dasar rumah robot.
Robot ini dapat merespon lingkungan baik cuaca panas maupun dingin sehingga dapat
memberikan efek suasana yang terjadai pada rumah robot tersebut.
Di dunia kedokteran teknologi robotika juga mulai di gunakan. Terbukti dengan
adanya teknologi lengan robotik dimana lengan tersebut terbuat dari robot hal ini sangat
menggunakan pikiran. Sebuah teknologi yang lura biasa tentunya, teknologi yang bisa
memberikan harapan jangka panjang untuk orang – orang yang mengalami kelumpuhan. Di bidang militer sendiri ada robot yang di ciptakan untuk di gunakan di medan
perang yaitu robot menyerupai tank tetapi berukuran kecil dan di lengkapi dengan berbagi
macam senjata dan navigasi serta di buat dari baja layaknya tank sungguhan. Robot ini di
kendalikan sepenuhnya dengan menggunakan wireless control. Indonesia juga membuat
robot yang sejenis yaitu Saturn. Robot tersebut di buat oleh Dr. Subchan bersama timnya
dalam lomba teknologi terapan dunia militer yaitu Minister of Defense (MoD) Grand
Challenge.
Dalam bidang perindustrian robot juga digunakan di berbagai proses manufaktur di
sebuah perusahaan untuk mempersingkat waktu produksi meningkatkan efisiensi, efektifitas
dan produktifitas perusahaan. Pada saat ini sudah banyak perusahaaa=n yang menggunakan
mesin- mesin otomatis diantaranya PT PINDAD , PT LEN ,PT BHARATA dan masih
banyak lainya. hal ini membuktikan bahwa robot tidak hanya di gunakan untuk keperluan
hiburan, militer, kedokteran saja tetapi robot juga dapat di gunakan untuk keperluan
manufaktur.
Meskipun kemajuan teknologi robot di indonesia belum begitu pesat namun beberapa
tahun ini di indonesia sendiri semakin marak di adakanya perlombaan robot yang di adakan
namun adanya dukungan dari pemerintah mengenai perkambangan robot di indonesia sangat
di butuhkan untuk menunjang biaya dan fasilitas dalam memajukan robotika di indonesia