7 BAB 2
LANDASAN TEORI
2.1 Teori Umum
2.1.1 Interaksi Manusia dan Komputer
Menurut Ben Shneiderman (2010) interaksi manusia dan komputer adalah cabang ilmu yang mempelajari hubungan antara manusia dan komputer yang mencakup perancangan, evaluasi, dan implementasi antarmuka pengguna agar mudah digunakan oleh manusia.
Menurut Ben Sneiderman (2010, pp. 88-89), delapan aturan emas yang digunakan untuk merancang suatu antar muka, yaitu : 1. Mencoba untuk konsisten
Konsistensi dalam antarmuka pengguna, dengan menerapkan konsistensi pada warna, layout, kapitalisasi, huruf dan lainnya yang digunakan. Konsistensi pada antarmuka pengguna sangat bermanfaat ketika digunakan oleh user, dimana user akan merasa tetap berada dalam aplikasi yang sama walaupun telah berpindah halaman.
2. Memenuhi kebutuhan universal
Yang dimaksud dalam memenuhi kebutuhan universal adalah memahami kebutuhan berbagai macam user dan membuat suatu desain yang fleksibel yang mendukung perubahan dalam konten. Berbagai pertimbangan terhadap berbagai macam user, baik
Novice-Expert, perbedaan umur, kecacatan fisik harus diperhatikan dalam membuat sebuah desain antarmuka pengguna.
3. Memberikan umpan balik yang informatif
Umpan balik harus diberikan sistem terhadap setiap aksi yang dilakukan oleh user. Untuk aksi sederhana yang dilakukan user bisa diberikan umpan balik yang sederhana, sedangkan untuk aksi besar yang biasanya jarang dilakukan oleh user, harus lebih diperhatikan dan dibuat lebih tegas. Setiap umpan balik yang diberikan harus jelas dan dapat dimengerti oleh user tanpa mengandung unsur ambiguitas.
4. Dialog untuk keadaan akhir
Urutan aksi hendaknya disusun menjadi kategori awal, tengah, dan akhir. Untuk memberikan kepuasan pencapaian, kelegaan, dan sebagai tanda untuk mempersiapkan diri memasuki kategori aksi selanjutnya, dibuatlah umpan balik yang informatif pada penyelesaian salah satu kategori aksi.
5. Pencegahan kesalahan
Sistem harus didesain sebagaimana agar user tidak membuat kesalahan. Salah satu contohnya adalah tidak memperbolehkan input karakter alphabet pada kotak entry nomor. Sistem harus bisa mengetahui kesalahan dan memberikan peringatan kepada user yang mudah dimengerti, membangun, dan jelas.
6. Pembalikan aksi yang sederhana
Dalam suatu aplikasi, pada setiap aksi harus terdapat pembalikan aksi. Fitur ini dapat memperkecil kesalahan, karena user tahu
bahwa aksi dapat dibatalkan. Pembalikan bisa saja atas suatu aksi seperti saat memasukan data, atau serangkaian aksi seperti memasikan nama dan alamat di kotak pengisian.
7. Mendukung pusat kendali internal
User harus memiliki kendali atas antarmuka dan mendapatkan tanggapan pada setiap aksinya. Pada saat user sudah terbiasa dengan suatu aplikasi, biasanya mereka ingin memiliki kendali atas antarmuka dan tanggapan pada aksinya. Aksi antarmuka yang tidak seperti biasanya, rangkaian pemasukan data yang membosankan, tidak bisa atau sulit mendapatkan informasi yang diperlukan, dan tidak bisa menghasilkan aksi yang diinginkan dapat menimbulkan keresahan dan ketidakpuasan pada user.
8. Mengurangi beban ingatan jangka pendek
Pada umumnya, manusia memiliki keterbatasan dalam memproses informasi dalam jangka pendek, maka itu sistem harus didesain dengan tampilan yang ringan, penggabungan halaman-halaman, pengurangan frekuensi window-motion, pemberian waktu latihan yang cukup untuk kode-kode, hafalan, dan rangkaian aksi. Oleh karena itu, dalam setiap perancangan aplikasi dibutuhkan alur aplikasi yang mudah diingat oleh user.
2.1.2 Rekayasa Piranti Lunak
Piranti lunak adalah kumpulan instruksi yang dijalankan yang mengandung fitur – fitur, fungsi, dan performa yang diinginkan. Rekayasa piranti lunak adalah sebuah aplikasi sistematik yang disiplin
terhadap proses pemgembangan, operasi, dan perawatan terhadap sebuah piranti lunak (Pressman , 2011, p. 4)
Menurut Roger S. Pressman (2011, p. 14) rekayasa piranti lunak bisa dibagi menjadi beberapa lapisan yang dapat dilihat pada gambar 2.1.
Gambar 2.1 Software engineering layers
Pada lapisan a quality focus adalah dasar dari suatu rekayasa piranti lunak, dalam setiap proses yang dilakukan, selalu mengacu kepada kualitas akhir yang dihasilkan.
Pada lapisan process merupakan dasar manajemen dalam mengontrol dari suatu proyek piranti lunak secara rasional dan teratur. Lapisan methods menyediakan teknik bagaimana membangun sebuah piranti lunak. Proses yang dilakukan pada metode itu adalah analisis kebutuhan, desain, pembuatan program, pengujian, dan perawatan.
Lapisan tools menyediakan support terhadap lapisan mehods dan process sehingga ketika lapisan tools diintegrasikan dengan lapisan yang lainnya, informasi dapat dihasilkan suatu alat untuk
digunakan oleh yang lain. Sistem yang mendukung pengembangan piranti lunak disebut sebagai computer-aided software engineering (Pressman , 2011, pp. 13-14)
2.1.3 Unified Modeling Language (UML)
Unified Modelling Language (UML) adalah suatu alat untuk memvisualisasikan dan mendokumentasikan hasil analisa dan desain yang berisi sintak dalam memodelkan sistem secara visual. Sedangkan menurut (Whitten & Bentley, 2004), UML merupakan satu kumpulan konvensi pemodelan yang digunakan untuk menentukan atau menggambarkan sebuah sistem software yang terkait dengan objek. (Mulawarman, 2011)
Dengan menggunakan UML, analisa dan end-users dapat menggambarkan dan memahami berbagai diagram spesifik yang digunakan dalam proyek pengembangan sistem. Sebelum UML, tidak ada standar, sehingga diagram dapat membingungkan. Akibatnya, diagram sering disalah-artikan, hal ini menyebabkan kesalahan dan pengerjaan ulang.(Satzinger, Jackson, & Burd, 2005, p. 48)
Model komponen sistem menggunakan UML yaitu : 1. Use case Diagram
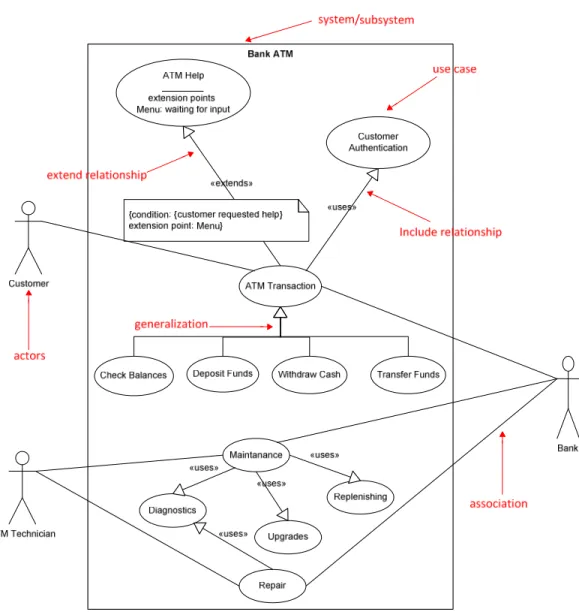
Use case adalah deskripsi dari fungsi sistem dari perspektif pengguna. Use case diagram digunakan untuk menunjukkan fungsionalitas bahwa sistem akan menyediakan dan menunjukkan pengguna mana yang akan berkomunikasi dengan sistem di beberapa cara untuk menggunakan fungsionalitas tersebut.
Use case diagram memiliki tiga aspek dari sistem: actor, use case dan system atau subsystem boundary. (Bennett, McRobb, & Farmer, 2006, pp. 145-146)
Gambar 2.2 Usecase diagram
2. Class Diagram
Class diagram adalah suatu struktur diagram UML yang menggambarkan struktur statis dari kelas dalam sistem dan menggambarkan atribut, operasi, dan hubungan antara kelas.
Class diagram membantu dalam memvisualisasikan struktur kelas-kelas dari suatu sistem dan merupakan tipe diagram yang paling banyak dipakai. Selama tahap desain, class diagram berperan dalam menangkap struktur dari semua kelas yang membentuk arsitektur sistem yang dibuat. (Mulawarman, 2011, p. 3)
Class memiliki tiga area pokok, yaitu; nama, atribut dan operation/ Event.
Gambar 2.3Class diagram (Dharwiyanti, 2003)
3. Activity Diagram
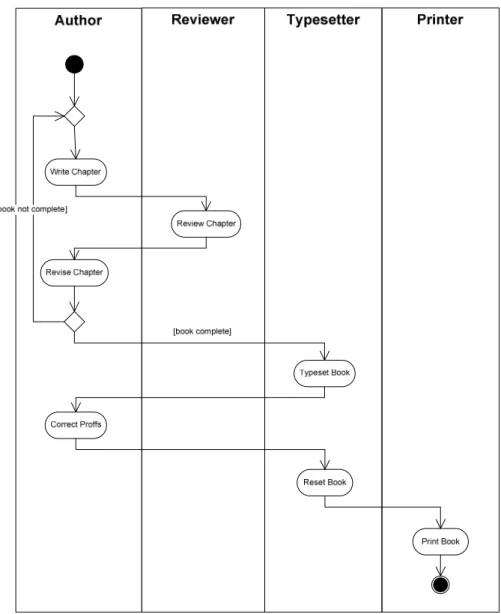
Activity diagram adalah diagram yang menunjukkan kegiatan dan tindakan untuk menggambarkan alur kerja.(Bennett, McRobb, & Farmer, 2006, p. 648)
Activity diagram adalah jenis diagram UML standar. Analisjuga menggunakan activity diagram untuk mendokumentasikan aliran kegiatan untuk setiap skenario use case.(Satzinger, Jackson, & Burd, 2005, p. 226)
Gambar 2.4Activity diagram (Bennett, McRobb, & Farmer, 2006, p. 105)
4. Sequence Diagram
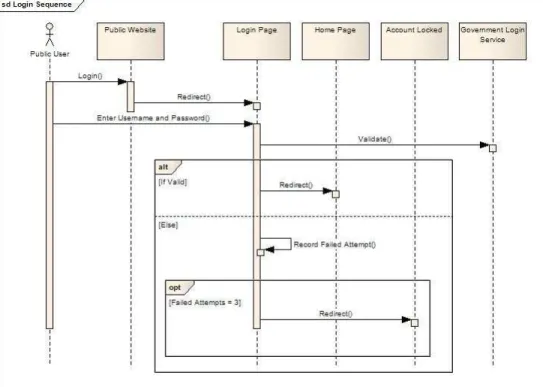
Sequence diagram adalah salah satu dari beberapa jenis diagram interaksi UML. Sequence diagram secara semantik setara dengan diagram komunikasi untuk interaksi sederhana. Sebuah sequence diagram menunjukkan interaksi antara objek yang diatur dalam urutan waktu. Sequence diagram dapat ditarik pada tingkat detail yang
berbeda dan untuk memenuhi tujuan yang berbeda pada beberapa tahapan dalam siklus pengembangan.
Aplikasi umum dari sequence diagram adalah untuk mewakili interaksi objek rinci yang terjadi untuk satu use case atau untuk satu operasi. Ketika sebuah sequence diagram digunakan untuk model perilaku dinamis dari sebuah use case, ini dapat dilihat sebagai spesifikasi rinci dari use case.Use case yang ditarik selama analisis berbeda dari use case yang ditarik selama desain. (Bennett, McRobb, & Farmer, 2006, pp. 252-253)
Gambar 2.5Sequence diagram
2.1.4 Python
Python merupakan salah satu bahasa pemrograman tingkat tinggi (High Level Language) yang bersifat interpreter, interaktif, dan berorientasi objek. Di dalam bahasa python sendiri pun terdapat
bahasa tingkat rendah (Low Level Languange) yang berhubungan dengan bahasa mesin atau assembly.
Pada dasarnya komputer hanya memahami instruksi dari bahasa pemrograman tingkat rendah. Untuk memahami bahasa pemograman tingkat tinggi, maka bahasa pemrograman tingkat tinggi harus diterjemahkan ke dalam bahasa pemrograman tingkat rendah terlebih dahulu sebelum instruksi - instruksi tersebut dijalankan.
Gambar 2.6 Perbandingan interpreter dan compiler
Ada dua jenis penerjemah dari bahasa pemrograman tingkat tinggi ke bahasa pemrograman tingkat rendah, yaitu : compiler dan interpreter.
Interpreter membaca kode program baris per baris, sehingga membutuhkan waktu lebih sedikit sedangkan compiler membaca program secara keseluruhan, kemudian menerjemahkan seluruh instruksi dalam program sekaligus.
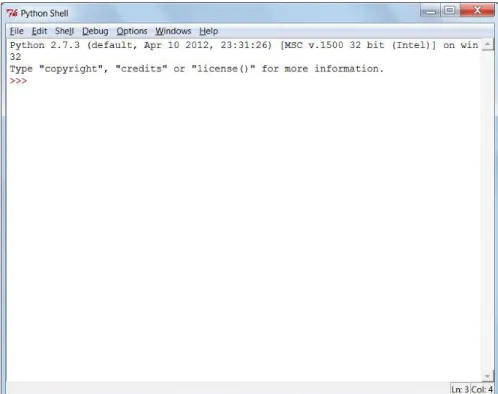
2.1.5 IDLE
IDLE (Integrated Developer Environment) merupakan salah satu editor yang sudah terintegrasi dengan interpreter bahasa pemrograman python yang umumnya digunakan oleh software
developer. IDLE memudahkan software developer dalam
mengembangkan sebuah aplikasi yang berbasis python.
Gambar 2.7Tampilan IDLE Python
Gambar diatas merupakan tampilan awal dari IDLE yang biasa disebut sebagai window interpreter. Dengan interpreter, setelah kita menulis sebuah perintah, python akan mengeksekusi perintah tersebut dan kemudian akan menampilkan hasilnya.
2.1.6 Engauge Digitizer
Piranti lunak ini selain mudah digunakan, juga berlisensi open source, software digitalisasi yang mengubah file gambar yang berupa grafik atau pemetaan menjadi koordinat. File gambar dapat berasal dari scanner, kamera digital atau screenshot. Hasil konversi berupa file dengan ekstensi txt yang berisi koordinat.
2.2 Dinamika Fluida
2.2.1 Makroskopik
Dinamis, yang berarti bisa berubah tergantung pada waktu. Pemodelan dinamis makroskopis menggambarkan perubahan lalu-lintas terhadap ruang dan waktu menggunakan persamaan diferensial. Arus lalu-lintas sering juga dianalogikan sebagai cairan atau gas. Pendekatan analitis masih bisa digunakan ketika mengamati suatu ruas jalan. Tetapi ketika interaksi temporal dan spasial arus lalu-lintas arus di jaringan jalan perlu dievaluasi, maka metode simulasi akan lebih tepat (Burghout, W., 2005)
Dalam model transmisi sel (Daganzo, C., 1994-1995), jalanan didiskritisasimenjadi beberapa sel. Model simulasi akan melacak jumlah kendaraan pada tiap sel dan setiap iterasi dihitung jumlah kendaraan yang melewati batas diantara sel yang bersebelahan. Aliran dari satu sel ke sel lainnya bergantung pada berapa banyak kendaraan yang bisa dikirim dari sel sebelumnya dan berapa banyak yang bisa diterima oleh sel berikutnya. Jumlah kendaraan yang bisa dikirim
adalah sebuah fungsi kepadatan dalam sel sebelumnya dan jumlah yang bisa diterima bergantung pada kepadatan dari sel penerima.
Pada tahun 1999 Daganzo menyempurnakan model transmisi lagged cell yang merupakan penyempurnaan dari skema sebelumnya, dimana jumlah kendaraan yang bisa diterima sebuah sel bergantung pada kepadatan beberapa saat sebelumnya di sel tersebut.
Model makroskopis lainnya yang menggunakan simulasi untuk menjelaskan perpindahan aliran kendaraan adalah Metacor (Elloumi, N. & H. Haj-Salem, 1994). Metacor didasarkan dari model analisis kontinu lain yang dikembangkan oleh Payne (1971). Jalanan dibagi ke dalam sel, kemudian dibagi kembali ke dalam beberapa interval waktu.Sedangkan kecepatan dan kepadatan dapat dihitung dengan mengevaluasi persamaan diferensial makroskopis.
Istilah umum untuk simulasi model arus lalu lintas adalah simulasi makroskopik. Penggunaannya telah berkembang luas, dan telah difasilitasi oleh perkembangan ekstensif sistem pengukuran lalu lintas yang telah dipasang di kota-kota besar dan jalan raya. Faktor tambahan yang membantu keuntungan makroskopik model popularitas adalah fakta bahwa data yang diperlukan untuk model tersebut (aliran jumlah, kecepatan) pada tingkat agregasi yang sama sebagai data yang diberikan oleh pengukuran.
2.2.2 Traffic Flow Theory
Pada bagian ini akan dijelaskan tentang bagaimana aliran sebuah kendaraan pada pendekatan model makroskopis. Hubungan antara
kepadatan, kecepatan, dan aliran dapat dianalogikan sebagai arus kepadatan jalan. Berdasarkan parameter-parameter tersebut, akan diperoleh hukum konservasi arus lalu-lintas yang akan diturunkan menjadi fungsi skalar model makroskopis (Kachroo, P., Al-nasur, S.J., & Wadoo, S.A., Shende, 2008).
2.2.2.1 Arus (Aliran)
Gambar 2.8 Ilustrasi Arus Lalu Lintas
Misalkan pada sebuah jalan terdapat arus lalu-lintas yang bergerak dengan kecepatan tetap (V0), dan memiliki
kepadatan (ρ0), sedemikian hingga jarak antara kendaraan
dianggap sama seperti ditunjukan pada gambar 2.1a. Pengamat mengukur jumlah kendaraan per satuan waktu (t). Dalam t satuan waktu masing-masing kendaraan telah menempuh jarak V0t, dan jumlah kendaraan yang melewati
pengamat dalam τ satuan waktu adalah jumlah kendaraan dalam jarak V0t, gambar 2.1b.
Kepadatan ρ0 adalah jumlah kendaraan dalam suatu
segmen jalan, maka dalam jarak V0t diberikan persamaan
arus,
(2.1)
atau dengan bentuk umum
f(ρ,V) = ρ(x,t) V(x,t) (2.2)
dimana f(ρ,V)adalah fungsi untuk fluks.
Anggap jumlah kendaraan yang melalui titik x0 dalam
waktu yang sangat kecil (∆t)belum berubah secara signifikan, maka dari itu ρ(x,t) dan v(x,t) dapat diperoleh dengan pendekatan x = x0 dan t = t0. Jumlah kendaraan yang
melewati pengamat melingkupi jarak pendek, dan bisa diperkirakan setara dengan ρ(x,t), v(x,t), ∆t, dimana fluks kendaraan diberikan oleh (2.2)
2.2.2.2 Hukum Konservasi
Pemodelan lalu-lintas, baik terdiri dari satu persamaan atau sebuah sistem persamaan, semuaberdasar hukum konservasi fisika. Ketika jumlah partikel tidak berubah selama proses berlangsung, maka dapat dikatakan konstan. Dengan menerapkan hal tersebut kedalam bentuk matematika, maka pola kepadatan dan kecepatan dalam beberapa waktu berikutnyaakan memungkinkan untuk diprediksi.
Dalam kasus ini, jumlah kendaraan dalam satuan ruas jalan [x1; x2] dijaga agar tetap. Anggap arus kendaraan bergerak. Asumsikan jalanan lurus tanpa ada gangguan pintu keluar, atau percabangan. Jumlah kendaraan N dalam [x1, x2] pada waktu t adalah integral dari kepadatan arus yang diberikan dalam
N = (2.3)
Berdasarkan persamaan diatas, dijelaskan bahwa jumlah kendaraan pada [x1, x2] akan mencapai maksimum ketika kepadatan maksimum ρm. Jumlah kendaraan masih
bisa berubah (meningkat atau menurun) seiring dengan waktu karena adanya perpindahan mobil dalam ruas jalan. Dengan asumsi tidak ada kendaraan yang terkena gangguan kecelakaan, maka perubahan jumlah kendaraan hanya terjadi pada garis batas saja. Maka dari itu jumlah kendaraan per satuan waktu dapat dituliskan sebagai berikut (2.8)
(2.4)
Oleh karena itu dari persamaan (2.3) dan (2.4), menghasilkan hukum konservasi
Persamaan ini menunjukan fakta bahwa perubahan jumlah kendaraan disebabkan karena adanya aliran pada garis batas.
Misalkan titik ujung menjadi variabel independen, maka turunan total dapat digantikan dengan turunan parsial untuk mendapatkan
(2.6)
Perubahan jumlah kendaraan bergantung pada jarak diberikan dengan
(2.7)
Subtitusikan persamaan (2.6) ke dalam (2.7), sehingga diperoleh persamaan
(2.8)
Persamaan ini menyatakan bahwa integral tentu beberapa bagian selalu nol untuk semua nilai dari variabel limit integral tentu. Satu-satunya fungsi yang memenuhi adalah fungsi nol. Maka kita asumsikan ρ(x,t), dan f(x,t) keduanya beraturan, maka persamaan satu dimensi dari hukum konservasi dinyatakan dengan persamaan transport
2.2.2.3 Hubungan Kepadatan-Kecepatan
Kepadatan lalu-lintas dan kecepatan kendaraan dihubungkan dengan satu persamaan, yaitu
(2.10)
Jika kepadatan dan kecepatan awal jalan diketahui, maka persamaan (2.10) bisa digunakan untuk memperkirakan kepadatan jalan yang akan terjadi.
Dengan demikian, kecepatan arus lalu-lintas bergantung pada kepadatan, disebut v(ρ). Pemilihan fungsi
kecepatan tersebut bergantung pada sifat dari model yang akan diamati.
Beberapa pemodelan yang telah diamati oleh peneliti lain. Pendekatan model greenshield yang akan digunakan pada beberapa model arus kendaraan.
Model greenshield ini sederhana dan banyak digunakan. Diasumsikan bahwa kecepatan berbanding lurus dengan fungsi dari arus kepadatan jalan, yang diberikan dengan
(2.11)
dimana vf adalah kecepatan aliran yang bebas dan ρm adalah
kepadatan maksimum. Untuk kepadatan nol, model merepresentasikan arus kecepatan vf, sehingga ketika
kepadatan mencapai maksimum ρm tidak ada kendaraan
yang masuk atau keluar.
2.2.3 Teori Fundamental
Terdapat tiga faktor penting jika kita membahas arus lalu lintas secara makroskopis, yaitu fluks kendaraan q, kepadatan ρ, dan kecepatan v. Disini, fluks hanya bergantung pada 2 variabel independen, yaitu kepadatan dan kecepatan.
Asumsikan keadaan stabil (fluks tidak berubah sepanjang jalan selama pengamatan berlangsung) dan semua kecepatan kendaraan dianggap tetap. Oleh karena itu, fungsi fluks dapat diberikan menjadi lebih sederhana karena ketergantungan pada jarak, waktu, dan interval tidak lagi berlaku pada keadaan stabil.
Pada pengamatan yang dilakukan oleh (Immers & Logghe, 2002) menunjukan bahwa satu kendaraan dengan yang lain memiliki kecenderungan berbeda tapi mendekati pada suatu titik dan bergantung pada kepadatan yang ada.
Gambar 2.9 Fundamental diagram
Dengan menggabungkan semua kemungkinan arus yang ada pada sebuah fungsi kesetimbangan, maka hubungan antara fluks q, kepadatan k, dan kecepatan u dapat disajikan dalam bentuk grafik yang lebih dikenal dengan fundamental diagram.
Perhatikan gambar 2.2. Beberapa titik yang perlu diperhatikan dalam diagram tersebut antara lain:
a. Arus bebas kendaraan
Ketika kondisi jalan berada dalam keadaan bebas, maka kendaraan bisa menambah kecepatan, hingga mencapai maksimum. Pada kondisi ini kepadatan akan mendekati nol.
b. Jam Point
Pada kondisi ini kendaraan tidak bisa lagi menambah kecepatan, dan kepadatan bertambah hingga mencapai maksimum dimana kendaraan berhenti.
c. Traffic jam
Kondisi dimana kendaraan berhenti total dan mencapai kepadatan maksimum.
2.2.4 LWR Model
Pada bagian ini akan ditunjukkan empat model yang berbeda untuk arus lalu-lintas dalam satu dimensi. Model yang pertama adalah model dengan satu persamaan, sedangkan sisanya berupa sistem dengan model dua persamaan. Semua model akan dijelaskan dengan persamaan diferensial parsial dan berbasis pada konservasi massa dan
persamaan kedua yang bertujuan untuk menangkap interaksi-interaksi kompleks yang diamati dalam gerakan arus lalu-lintas. Sebagai tambahan model persamaan yang kedua ini memberikan jalan lain untuk memperoleh kecepatan dan kepadatan. Maka dari itu aliran tidak dalam keadaan setimbang seperti model dengan satu persamaan. Ini adalah perbedaan utama antara skalar dengan sistem model.
Model pertama digunakan untuk menjelaskan masalah pada arus kendaraan yang diketahui juga dengan LWR model. LWR model adalah model skalar, bergantung pada waktu, non-linear, dan termasuk persamaan diferensial parsial tipe hiperbolik. Dalam model ini, arus kepadatan dijaga jumlahnya, sehingga diperoleh
(2.12) dengan fluks yang yang dinyatakan oleh
(2.13) dimanaV(ρ(x,t)) adalah fungsi kecepatan yang diberikan oleh (2.11).
Dalam model LWR, diasumsikan bahwa kecepatan hanya bergantung pada kepadatan. Akibatnya, arus akan setimbang ketika fungsi kecepatan-kepadatan digunakan. Ketika kepadatan arus lalu lintas cukup kecil, maka kecepatan kendaraan akan relatif tetap, sehingga model tidak menunjukkanadanya distribusi kecepatan setiap kendaraan. Maka dari itu, model tidak bisa menjelaskan sifat yang diamati dalam arus yang tidak terlalu padat.
Meskipun demikian,vf sebagai kecepatan rata-rata mungkin akan menyelesaikan masalah ini. Dalam sisi ini model bersifat anisotropik sebagai pokok dari arus kendaraan yang diamati, misalnya sifat
kendaraan dipengaruhi sebagian besar oleh kendaraan yang berada di depannya. Hal ini bisa ditemukan pada model eigenvalue yang diberikan oleh
(2.14)
Dengan demikian, model memungkinkan data informasi untuk berjalan secepat arus kendaraan, dan tidak lebih, karena memenuhi 0<f’(ρ) <V(ρ), karena
(2.15)
LWR model yang diberikan oleh (2.10) dan (2.11) adalah model sederhana dan tidak bisa mendapatkan semua interaksi kompleks untuk model arus kendaraan yang sebenarnya. Untuk alasan ini, modifikasi kepada LWR model telah disarankan. Salah satunya dengan berbagai macam hubungan antara kecepatan-kepadatan. Cara kedua adalah dengan memasangkan konservasi massa dengan persamaan (2.11) yang mencoba meniru gerakan arus dibanding model kecepatan-kepadatan yang diberikan kemudian.
2.3 Persamaan Diferensial Parsial
2.3.1 Persamaan Transport
Suatu fluida mengalir di dalam pipa yang mempunyai diameter konstan dengankecepatan c dalam arah x. Suatu zat atau polutan dimasukkan ke dalam alirantersebut. u(x, t) menyatakan
konsentarasi zat tersebut dalam gram/cm padasaat t. Banyaknya zat dalam selang [0, b] pada saat t adalah
(2.16)
Pada saat t + h, molekul zat telah bergerak ke kanan sejauh ch. Jadi berlaku
(2.17)
Untuk mendapatkan persamaan dari u, turunkan kedua ruas dari (2.17) terhadap b, diperoleh
(2.18) Dan turunkan lagi terhadap h diperoleh
(2.19)
(2.20)
sebagai persamaan transport, dengan solusi u(x, t) = f(x−ct) untuk sebarang f.
2.3.2 Metode Karakteristik Perhatikan persamaan
(2.21) dengan a dan b konstan yang tidak nol bersama-sama.
Jika kita mempunyai fungsi w(x, y), turunanberarah w dalam arah s = (a, b) dengan |s| =1 adalah
(2.22)
Turunan berarah ini merupakan bilangan yang digunakan untuk menyatakankemiringan permukaan w(x, y), pada satu titik, bila dipotong oleh bidangtegak melalui s.
Bila kita bandingkan turunan berarah dari w dengan persaman diferensialdi atas, haruslah turunan berarah bernilai nol. Jadi u(x, y) bernilai konstandalam arah s = (a, b), juga kelipatannya. Sedangkan persamaan diferensialberlaku pada bidang x−y, jadi sepanjang garis yang lain, yang sejajar dengans, berlaku pula u(x, y) = konstan, dengan konstan yang berbeda. Garis yangberpadanan dengan konstan tersebut berbentuk bx − ay = konstan, yangdisebut garis karakteristik.Persamaan garis karakteristik diperoleh dari hubungan dy/dx = b/a, kemiringan garis sama dengan kemiringan vektor arah.
Secara geometri: untuk setiap titik (x, y) pada garis bx−ay = k dengan suatuk, memberikan u(x, y) = uk, untuk k yang lain akan memberikan nilai u yanglain pula. Oleh karena itu, solusinya u(x, y) = f(bx − ay) bergantung padasatu bentuk bx − ay, dengan f fungsi sebarang.
2.4 Metode Numerik
2.4.1 Deret Taylor dan Skema Beda Hingga
Deret Taylor adalah representasi fungsi matematika sebagai jumlahan tak hingga dari suku-suku yang nilainya dihitung dari turunan fungsi tersebut di suatu titik. Deret ini dapat dianggap sebagai limit polinomial Taylor.
Suatu fungsi f(x) yang dihampiri oleh Deret Taylor di sekitar titik x0 dituliskan sebagai berikut
(2.23)
dimana,
(2.24)
(2.25) Melalui Deret Taylor, kita dapat menyusun sebuah skema beda hingga yang pada akhirnya skema ini akan digunakan untuk menyelesaikan persamaan diferensial parsial secara numerik.
Pertama-tama, uraikan deret Taylor untuk fungsi f di sekitar x dinyatakan dengan f(x+h) dan f(x-h), yaitu
(2.27)
Melalui persamaan (2.26) dan (2.27), kita dapat menentukan turunan ke-n dari fungsi f(x) yang selanjutnya disubstitusikan ke dalam persamaan diferensial parsial yang diberikan. Persamaan baru yang diperoleh sering disebut dengan skema beda hingga.
Skema beda hingga dikatakan stabil jika skema beda menghasilkan solusi yang berhingga. Skema beda dikatakan konsisten terhadap PDPnya jika selisih antara persamaan beda dengan PDPnya (suku-suku truncation error) menuju nol jika lebar grid menuju nol. Skema beda hingga dikatakan konvergen jika solusi skema beda mendekati solusi PDP jika lebar grid menuju nol.
Gambar 2.10 Skema hubungan PDP, kestabilan, kekonsistenan, dan persamaan beda
2.4.2 Teorema Equivalensi Lax
Untuk suatu masalah nilai awal yang dalam bentuk yang tepat, jika suatu persamaan beda konsisten dan stabil, maka persamaan beda tersebut pastilah konvergen.