27
27
BAB III
RANCANGAN SISTEM PENGENDALI ROBOT CRANE
3.1 Perancangan Perangkat Keras
3.1.1 Arduino Board
Pada perancangan perangkat keras, Arduino Board berfungsi sebagai mikrokontroller sekaligus antarmuka dimana pada rangkaian antarmuka tersebut sinyal data akan diubah menjadi sinyal listrik bertegangan 12VDC untuk menggerakkan motor-motor.
Pada Arduino Board terdapat pin-pin yang berguna membawa saluran pembawa informasi, dalam hal ini penulis menggunakan 1 pin sebagai inputan dan 8 pin sebagai output-an. Pin inputan digunakan untuk membaca dan menerima sinyal yang dihasilkan dari Communication Port yg sebelumnya telah diprogram penghasil sinyal dari Visual Basic. Sedangkan pin output-an digunakan sebagai penggerak relay-relay yang terintegrasi pada papan driver motor, relay-relay tersebutlah yang sebenarnya mensuply tegangan 12VDC pada motor-motor robot supaya dapat bergerak.
Ilustrasinya adalah: PerintahVB.NetArduinoRelay BoardMotor. Namun demikian, pada Arduino Board terlebih dahulu harus di program microcontroler-nya supaya dapat menterjemahkan perintah-perintah yang dikirim oleh
VB.Net untuk diubah menjadi sinyal-silnyal listrik pada pin output.
Gambar 3.1. Modul Arduino Uno
3.1.2 Rangkaian Antar Muka a) Gambaran Umum Antar Muka
Antar muka pada sistem pengendali Robot Crane berfungsi sebagai driver
(pengendali), yang cara kerjanya adalah mengubah sinyal data digital dari Arduino Board menjadi sinyal penggerak motor DC sebesar 12 Volt DC. Hal ini diperlukan karena tegangan sinyal data digital pada Arduino Board kurang mencukupi untuk menggerakkan sebuah motor DC, sinyal - sinyal tersebut hanya mampu menyalakan dioda led saja yang membutuhkan tegangan sekitar 2 s/d 3 volt DC.
Rangkaian antar muka terdiri dari beberapa komponen, diantaranya adalah : 8 buah relay dengan tipe HRS2H-5VDC, 8 buah Dioda LED, dan 8 buah resistor 100 ohm. Keseluruhan komponen ini terintegrasi pada sebuh PCB (Printed Circuit Board), dan memiliki fungsi masing-masing.
Delapan buah relay bertipe HRS2H-5VDC fungsinya dibagi menjadi 2 bagian, yaitu 4 relay sebagai penggerak motor forward, dan 4 relay sebagai penggerak motor reverse. Fungsi dari 8 buah dioda LED pada rangkaian antar muka disini adalah hanya sebagai indikator langkah motor yang sedang digerakkan. Resistor hanya berfungsi sebagai pengaman LED.
b) Rangkaian Penggerak Motor DC
Rangkaian penggerak motor DC terdiri dari 8 buah relay bertipe HRS2H-5VDC. Seperti yang telah dibahas pada Bab sebelumnya, sifat relay adalah apabila terdapat arus pada katub input, maka internal saklar akan bekerja untuk melewatkan arus output ke motor. Sifat relay inilah yang digunakan sebagai penggerak motor DC, bila input pada relay pertama mendapatkan sinyal data dari Arduino Board, maka arus bertegangan 12 Volt DC akan menggerakkan motor DC.
3.1.3 Rancangan Robot Crane
a) Motor DC
Pada rancangan Robot Crane ini, terdapat empat buah motor DC yang fungsinya berbeda-beda. Motor DC pertama berfungsi untuk menggerakkan gripe, motor DC kedua berfungsi sebagai elevator, motor DC ketiga berfungsi sebagai shifter (penggeser gerak maju-mundur), sedangkan motor DC empat berfungsi sebagai penggerak axis putar. Masing - masing penggerak motor DC tersebut dikendalikan oleh antar muka pengendali motor DC yang telah dibahas pada sub-bab sebelumnya.
b) Spesifikasi Gripe
Gripe merupakan bagian Robot Crane yang berfungsi mencengkram suatu benda. Konstruksi gripe adalah konstruksi yang paling rumit diantara konstruksi yang
lain. Pada gripe ini terdapat dua buah relay yang dirangkai pada kutub positif motor dan pada salah satu kutub negatif motor. Oleh karena motor DC yang digunakan menggunakan internal gearbox, maka cengkraman gripe tidak akan terlepas walaupun supply arus ke motor gripe terputus. Berikut ini adalah konstruksi dari gripe :
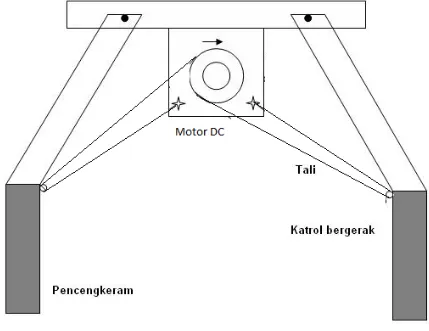
Gambar 3.2 Konstruksi Gripe
Gripe digerakkan oleh motor DC pertama dengan cara kerja sebagai berikut:
Motor DC pertama berputar searah jarum jam
Putaran tersebut menggulung tali yang menarik sistem katrol
Sistem katrol terdiri dari 1 katrol bergerak, sehingga motor DC gripe 2 kali lebih ringan kerjanya untuk menutup sebuah gripe.
Cara kerja rnernbuka Gripe adalah sebagai berikut:
Motor DC berputar berlawanan arah jarum jam
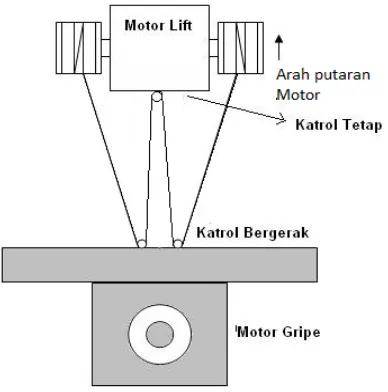
c) Spesifikasi Lift
Lift pada Robot Crane berfungsi sebagai pengangkat sebuah benda. Lift tersebut digerakkan oleh motor DC kedua yang menarik sebuah sistem katrol dengan 2 katrol bergerak dan 1 katrol tetap, sehingga motor DC kedua 4 kali lebih ringan untuk mengangkat sebuah benda. Penggunaan katrol bergerak diperlukan karena robot tidak hanya mengangkat benda saja tapi juga mengangkat motor gripe, sehingga beban pada motor lift adalah berat motor gripe + berat benda.
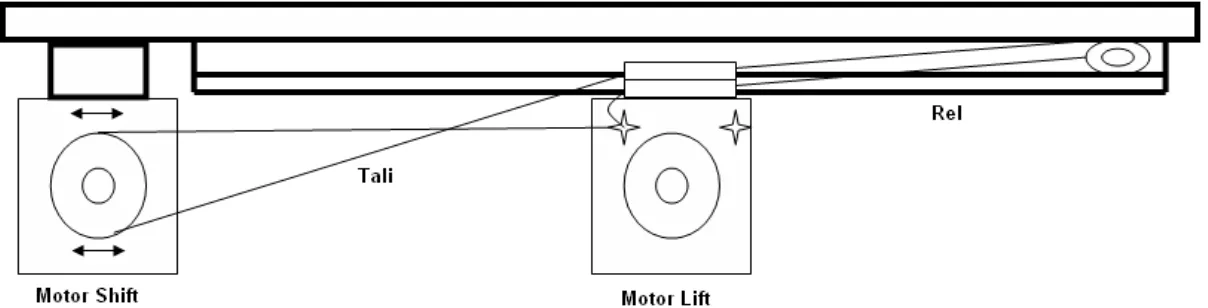
d) Spesifikasi Shift
Shift pada Robot Crane berfungsi sebagai penggeser sebuah benda. Artinya, motor shift menggeser beban menjauh atau mendekati titik pusat. Shift tersebut digerakkan oleh motor DC ketiga yang menarik dan mengulur secara bolak-balik dengan sebuah sistem katrol tetap, sehingga motor DC ketiga tidak mengalami peringanan kerja. Konstruksi shift tidak sederhana dikarenakan pemilihan bahan yang dapat bergerak geser kanan-kiri serta mampu menahan beban yaitu berat motor lift + berat motor gripe + berat benda.
e) Spesifikasi Axis Putar
Seperti yang telah dikatakan pada sub-bab sebelumnya, bahwa motor DC keempat berhubungan dengan axis putar yang berfungsi sebagai pemutar Robot Crane. Putaran Robot Crane diawali pada posisi 0 °, dan mampu melakukan putaran 90° sampai dengan -90°. Posisi tersebut berdasarkan kisaran perhitungan sinyal penggerak yang diberikan kepada motor DC keempat tersebut.
Lain halnya dengan motor DC pertama, kedua dan ketiga yang menggerakkan gripe, lift, dan shift, motor DC keempat ini langsung berhubungan dengan axis putar dengan menggunakan belt. Belt berfungsi sebagai penghubung antara motor dengan poros utama robot. Sehingga penggunaan belt menjadi sistem gear yang dapat meringankan kerja motor. Yang harus diperhatikan dalam konstruksi axis putar adalah keseimbangan antara beban dengan pemberat supaya robot tidak terjungkal manakala mengangkat beban yang berat.
3.2 Perancangan Perangkat Lunak
Pada perancangan perangkat lunak, Bahasa pemrograman Visual Studio VB.Net 2010 digunakan sebagai bahasa untuk membuat program Robot Crane, dimana pada VB.Net akan berkomunikasi langsung dengan Arduino Board. Adapun script perancangan program pada Arduino dan program VB.Net dapat dilihat pada halaman Lampiran.
Pada perancangan perangkat lunak ini sepenuhnya mengadopsi metode teach pendant. Teach Pendant merupakan metode mengajarkan robot dengan menekan tombol-tombol pada keyboard yang telah difungsikan sesuai dengan gerakan-gerakan robot yang diinginkan.
Pada Teach Pendant ini terdapat dua metode yang digunakan. Pertama menggunakan fungsi tombol pada keyboard dan yang kedua menggunakan tombol GUI (Graphical User Interface). Keduanya memiliki fungsi yang sama yakni digunakan untuk memfungsikan gerakan-gerakan robot.
Hal yang membedakan diantara keduanya, yaitu pada metode Keyboard dilengkapi dengan tombol OTOMATIS sebagai pengulang gerakan dan Tabel Rekam Pulsa. Tombol OTOMATIS dimaksudkan untuk mempresentasikan bahwa kita dapat mengajarkan kepada robot untuk mengulang gerakan-gerakan yang sudah kita perintahkan. Sehingga robot dapat melakukan pengulangan gerakan yang serupa. Sedangkan Tabel Rekam Pulsa berfungsi untuk menghitung berapa durasi tiap-tiap gerakan, durasi inilah yang nantinya akan digunakan robot untuk mengulangi gerakan sehingga pengulangan gerakan dapat dilakukan dengan ketepatan yang nyaris sama.
Adapun pada metode GUI tidak dilengkapi dengan tombol otomatis, dikarenakan pada metode GUI hanya diperuntukkan untuk menggerakkan robot secara
manual. Tidak ada pengulanagan gerakan pada metode GUI.
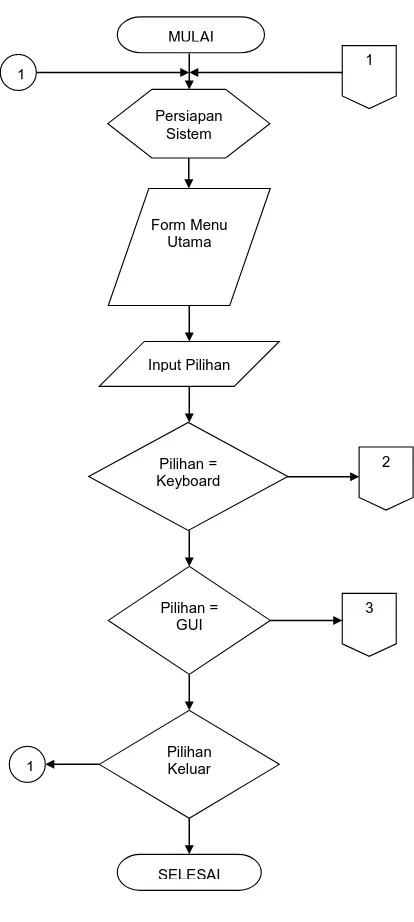
Perancangan perangkat lunak dibangun dengan algoritma sebagai berikut:
1. Mulai
2. Baca serial port = count 3. Alamat port Arduino = COM18 4. Delay axis = 100
5. Delay lift = 100 6. Delay shift = 100 7. Delay gripe = 100 8. repeat
9. Tampilkan menu utama 10. Baca pilih
11. jika pilih = keyboard maka
12. jalankan sub program keyboard function 13. akhir jika
14. jika pilih = GUI maka
15. jalankan sub program GUI function 16. akhir jika
17. sampai pilih = exit 18. Selesai
Gambar 3.6 Diagram Alir Menu Utama MULAI Persiapan Sistem Form Menu Utama Input Pilihan Pilihan = Keyboard Pilihan = GUI Pilihan Keluar SELESAI 1 2 3 1 1
3.2.1 Teach Pendant metode Keyboard
Teach Pendant metode Keyboard mengajarkan robot dengan menekan tombol-tombol pada keyboard yang telah difungsikan sesuai dengan gerakan-gerakan robot yang diinginkan. Tombol – tombol tersebut adalah :
1 berfungsi menggerakkan Robot Crane cengkram.
2 berfungsi menggerakkan Robot Crane buka cengkram.
3 berfungsi menggerakkan Robot Crane keatas.
4 berfungsi menggerakkan Robot Crane kebawah.
5 berfungsi menggerakkan shift bergerak menarik.
6 berfungsi menggerakkan shift bergerak mendorong.
7 berfungsi menggerakkan axis ke kanan.
8 berfungsi menggerakkan axis ke kiri.
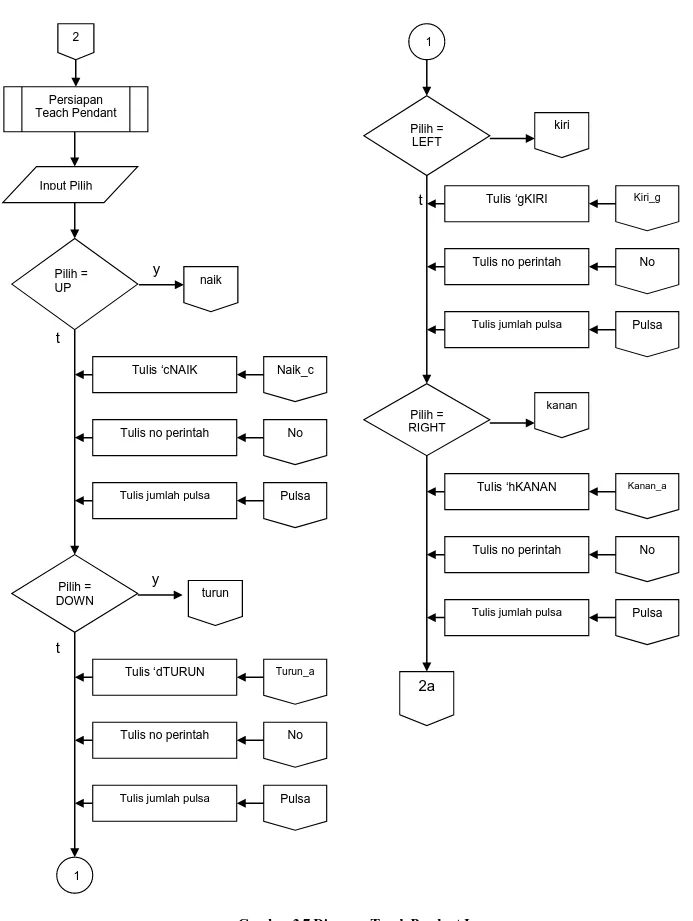
Berikut ini adalah algoritma subprogram Teach Pendant metode Keyboard
1. tampilkan form teach pendant keyboard 2. baca pilih
3. jika pilih = 3 maka
4. tulis kolom nomor perintah = nomor perintah ke 5. tulis kolom perintah = ‘cNAIK’
6. tulis kolom pulsa = jumlah pulsa 7. brs = brs+1
8. akhir jika
9. jika pilih = 4 maka
10. tulis kolom nomor perintah = nomor perintah ke 11. tulis kolom perintah = ‘dTURUN’
12. tulis kolom pulsa = jumlah pulsa 13. brs = brs+1
14. akhir jika
15. jika pilih = 7 maka
16. tulis kolom nomor perintah = nomor perintah ke 17. tulis kolom perintah = ‘gKIRI’
18. tulis kolom pulsa = jumlah pulsa 19. brs = brs+1
20. akhir jika
21. jika pilih =8 maka
22. tulis kolom nomor perintah = nomor perintah ke 23. tulis kolom perintah = ‘hKANAN’
24. tulis kolom pulsa = jumlah pulsa 25. brs = brs+1
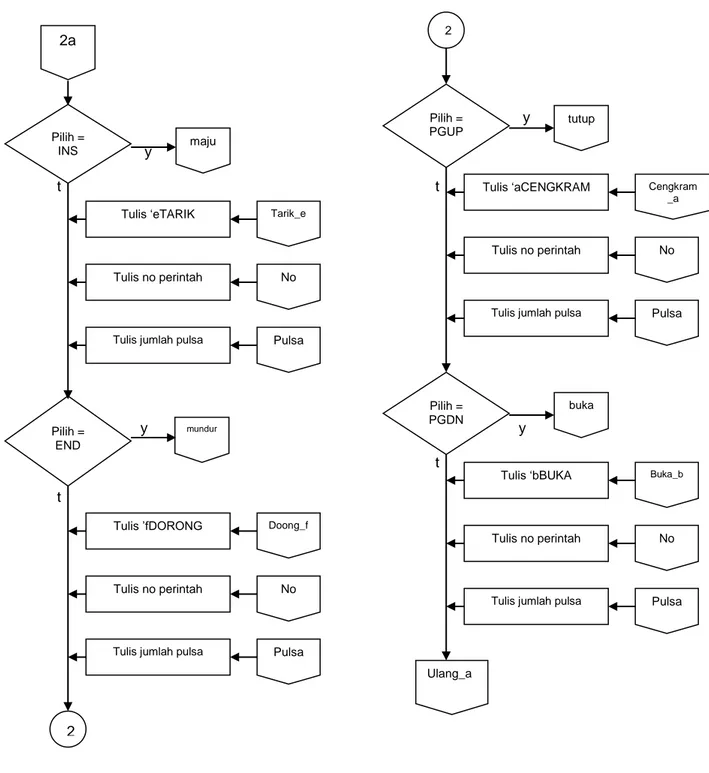
27. jika pilih = 5 maka
28. tulis kolom nomor perintah = nomor perintah ke 29. tulis kolom perintah = ‘eTARIK’
30. tulis kolom pulsa = jumlah pulsa 31. brs = brs+1
32. akhir jika
33. jika pilih = 6 maka
34. tulis kolom nomor perintah = nomor perintah ke 35. tulis kolom perintah = ‘fDORONG’
36. tulis kolom pulsa = jumlah pulsa 37. brs = brs+1
38. akhir jika
39. jika pilih = 1 maka
40. tulis kolom nomor perintah = nomor perintah ke 41. tulis kolom perintah = ‘aCENGKRAM’
42. tulis kolom pulsa = jumlah pulsa 43. brs = brs+1
44. akhir jika
45. jika pilih = 2 maka
46. tulis kolom nomor perintah = nomor perintah ke 47. tulis kolom perintah = ‘bBUKA’
48. tulis kolom pulsa = jumlah pulsa 49. brs = brs+1
t y
y
t
y
t
Gambar 3.7 Diagram Teach Pendant I 1
Pilih = LEFT
kiri
Pulsa Tulis ‘gKIRI Kiri_g
Tulis no perintah No
Tulis jumlah pulsa
Pilih = RIGHT
kanan
Pulsa Tulis ‘hKANAN Kanan_a
Tulis no perintah No
Tulis jumlah pulsa
2a
1 Pilih =
DOWN turun
Pulsa Tulis ‘dTURUN Turun_a
Tulis no perintah No
Tulis jumlah pulsa
2
Input Pilih
Pilih =
UP naik
Pulsa Tulis ‘cNAIK Naik_c
Tulis no perintah No
Tulis jumlah pulsa
Persiapan Teach Pendant
y y t t y y t t
Gambar 3.8 Diagram Teach Pendant II 2
Pilih = PGUP
tutup
Pulsa Tulis ‘aCENGKRAM Cengkram
_a
Tulis no perintah No
Tulis jumlah pulsa
Pilih = PGDN
buka
Pulsa Tulis ‘bBUKA Buka_b
Tulis no perintah No
Tulis jumlah pulsa
Ulang_a Pilih =
END
mundur
Pulsa Tulis ’fDORONG Doong_f
Tulis no perintah No
Tulis jumlah pulsa
2
Pilih =
INS maju
Pulsa Tulis ‘eTARIK Tarik_e
Tulis no perintah No
Tulis jumlah pulsa 2a
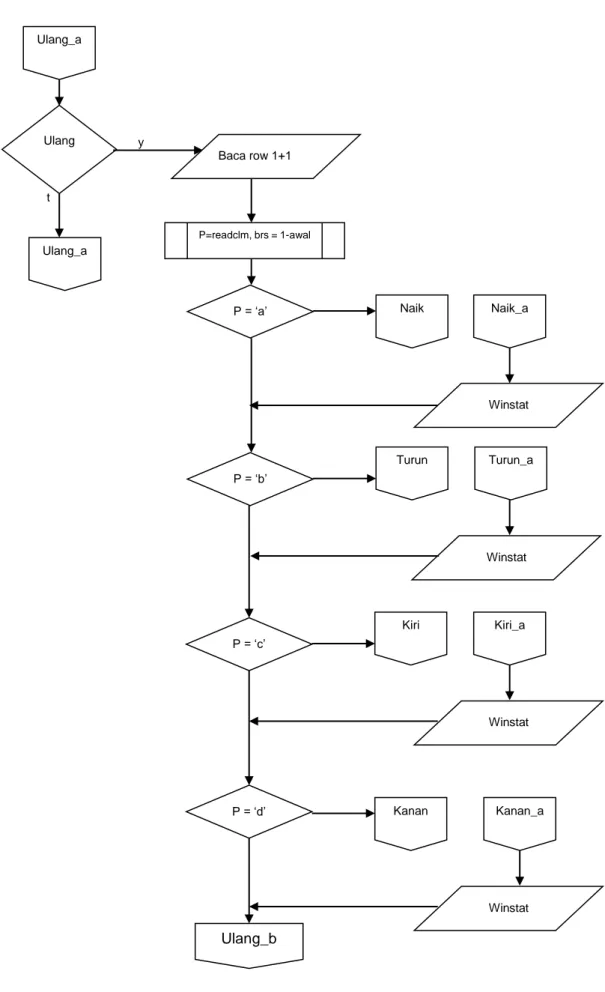
3.2.2 Metode Perulangan/Otomatis
Seperti yang pernah disinggung terdahulu bahwa pada Teach Pendant metode Keyboard ini terdapat metode perulangan/otomatis sebagai presentasi bahwa robot dapat melakukan perintah sama seperti perintah yang terakhir kita berikan. Dalam hal ini
perintah pengulangan penulis batasi yaitu
CENGKRAMNAIKKANANBUKAKIRITURUN dan kembali ke CENGKRAM. Metode perulangan ini memiliki algorotma sebagai berikut
1. procedure repeat 2. begin
3. baca table
4. jika lift=NAIK maka 5. baca jumlah pulsa 6. cmd=”aNaik”
7. dengan jumlah pulsa 8. brs=brs+1
9. akhir jika
10. jika lift=TURUN maka 11. baca jumlah pulsa 12. cmd=”bTurun” 13. dengan jumlah pulsa 14. brs=brs+1
15. akhir jika
16. jika axis=KIRI maka 17. baca jumlah pulsa 18. cmd=”cKiri”
19. dengan jumlah pulsa 20. brs=brs+1
21. akhir jika
22. jika axis=KANAN maka 23. baca jumlah pulsa 24. cmd=”dKanan” 25. dengan jumlah pulsa 26. brs=brs+1
27. akhir jika
28. jika shift=MAJU maka 29. baca jumlah pulsa 30. cmd=”eMaju”
31. dengan jumlah pulsa 32. brs=brs+1
33. akhir jika
34. jika shift=MUNDUR maka 35. baca jumlah pulsa 36. cmd=”fMundur” 37. dengan jumlah pulsa 38. brs=brs+1
40. jika gripe=TUTUP maka 41. baca jumlah pulsa 42. cmd=”gTutup” 43. dengan jumlah pulsa 44. brs=brs+1
45. akhir jika
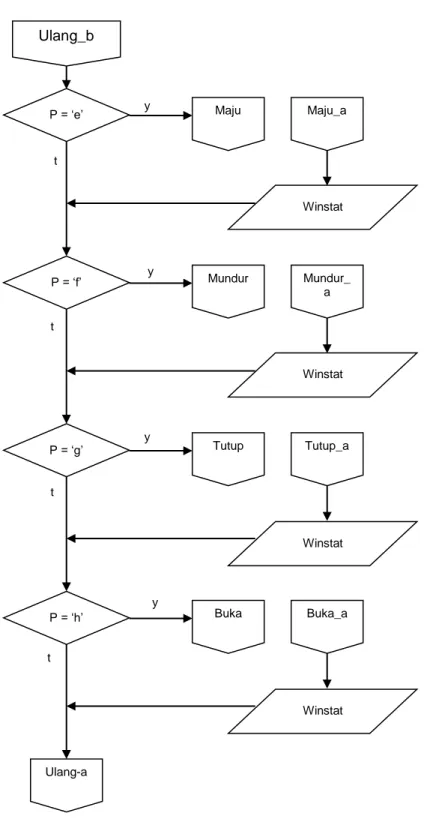
46. jika gripe=BUKA maka 47. baca jumlah pulsa 48. cmd=”hBuka” 49. dengan jumlah pulsa 50. brs=brs+1
51. akhir jika 52. akhir
y
t
Gambar 3.9 Diagram Repeat I P = ‘c’ Kiri Kiri_a Winstat P = ‘d’ Kanan Kanan_a Winstat Ulang_b Winstat Winstat P = ‘b’ Turun Turun_a Naik Naik_a Ulang_a Ulang Baca row 1+1 P = ‘a’ Ulang_a P=readclm, brs = 1-awal
y t y t y t y t
Gambar 3.10 Diagram Repeat II Winstat P = ‘h’ Buka Buka_a Winstat Ulang-a P = ‘g’ Tutup Tutup_a P = ‘f’ Mundur Mundur_ a Winstat
P = ‘e’ Maju Maju_a
Winstat