Disertasi disusun untuk memenuhi salah satu syarat
Memperoleh gelar
Doktor (Dr.)
di
Institut Teknologi Sepuluh Nopember
Oleh:
Fachrudin
Nrp. 2209301010
Tanggal Ujian
: 23 Februari 2016
Peri ode Wisuda : Maret 201 7
Disetujui oleh:
1. Prof. Dr. Ir. Imam Robandi, MT. (Pembimbing I) XNIP : 196308171990031001
2. Prof.Ir. Nyoman Sutantra, M.Sc., Ph.D (Pembimbing II) : NIP : 1951106051978031002
3. Prof. Dr. Ir. Yanuarsyah Haroen NIP: 195201011978021004
4. Dr. Ardyono Priyadi, ST., M.Eng. NIP: 197309271998031004
5. Dr. Ir. Agus Sigit Pramono, DEA. NIP: 196508101991021001
(Penguji)
(Penguji)
KATA PENGANTAR
Assalamu,alaikum Wr.Wb.
Tiada kata yang terbaik, terindah dan terpuji selain puji syukur kepada Allah SWT karena dengan segala limpahan rahmat dan hidayah-Nya sehingga Disertasi ini dapat terselesaikan sebagai penutup dari proses studi Program Doktor pada Jurusan Teknik Elektro Institut Sepuluh Nopember (ITS) Surabaya.
Segala aktifitas yang sangat membutuhkan energi dan pengorbanan telah tercurahkan mulai dari awal hingga akhir studi yang tiada tujuan lain selain pendewasaan akademik bagi insan akademik dan pelaksanaan ibadah dari tugas sebagai khalifah Allah di muka bumi ini.
Selama proses studi tentunya tidak lepas dari peran aktif segala pihak, dengan segala kerendahan hati saya ucapkan terima kasih yang sangat dalam kepada;
1. Pemerintah Republik Indonesia melalui Kemendikbud yang telah memberikan beasiswa studi S3 (BPPS).
2. Rektor Universitas Widyagama Malang yang telah memberikan tugas belajar untuk menempuh S3.
3. Rektor, Direktur Pasca Sarjana dan Ketua Jurusan Teknik Elektro, Institut Sepuluh Nopember (ITS) Surabaya yang telah memberikan kesempatan untuk melaksanakan studi pada Program Doktor.
4. Prof. Dr. Ir. Imam Robandi, MT. selaku Promotor, Pembimbing dan Motivator yang selalu memberikan semangat untuk menjadi yang terbaik.
5. Prof. Ir. Nyoman Sutantra, M.Sc., Ph.D. selaku Co-Promotor yang telah membimbing dan memotivasi dalam penelitian.
6. Prof. Dr. Ir. Yanuarsyah Haroen, selaku Penguji yang telah banyak memberikan wawasan keilmuan.
7. Dr. Ardyono Priyadi, ST., M.Eng., selaku penguji yang telah memberikan semangat perubahan.
8. Dr. Ir. Agus Sigit Pramono, DEA., selaku penguji yang telah memberikan banyak wawasan penulisan.
9. Segenap staff pasca sarjana dan jurusan teknik elektro yang telah banyak membantu proses administrrasi.
10. Seluruh sivitas akademika Universitas Widyagama Malang yang selalu mendukung penyelesaian studi.
11. Seluruh member lab PSOC yang sinergi dan selalu bersemangat bersama untuk menjadi yang terbaik.
12. Istri dan anak-anakku yang dengan ikhlas dan sabar selalu memberikan semangat dan harapan.
Dan seluruh pihak yang tidak mampu tersebutkan, semoga amal ibadahnya dibalas dengan kebaikan oleh Allah SWT.
Tiada gading yang tak retak, semoga momentum ini menjadi penyemangat untuk pengembangan aktifitas akademik yang kerkelanjutan.
Wassalamu,alaikum Wr.Wb.
PERNYATAAN KEASLIAN DISERTASI
Yang bertanda tangan di bawah ini adalah saya:Nama : Fachrudin NRP. : 2209 301 010 Program : Doktor
Jurusan : Teknik Elektro Fakultas : Teknologi Industri
Institusi : Institut Teknologi Sepuluh Nopember Surabaya Dengan ini menyatakan bahwa Disertasi saya yang berjudul:
Optimisasi Sistem Kontrol Kaskade Logika Fuzzy dan PID pada Kemudi Kendaraan Sistem Steer By Wire menggunakan
Quantum Behaved Particle Swarm Optimization
secara keseluruhan adalah hasil karya intelektual mandiri kecuali pada bagian yang menyebutkan sumbernya sesuai dalam daftar pustaka.
Demikian pernyataan ini saya buat dengan sebenarnya.
Surabaya, Januari 2017 Yang membuat pernyataan
Optimisasi Sistem Kontrol Kaskade Logika Fuzzy dan PID
pada Kemudi Kendaraan Sistem Steer By Wire
menggunakan Quantum Behaved Particle Swarm Optimization
Nama Mahasiswa : FachrudinNRP : 2209301010
Pembimbing : Prof. Dr. Ir. Imam Robandi, MT. Co- Pembimbing : Prof. Ir. Nyoman Sutantra, M.Sc., Ph.D.
ABSTRAK
Penelitian ini bertujuan untuk optimisasi parameter sistem kontrol pada sistem kemudi kendaraan dengan fully automatic of steer by wire system. Sistem kontrol kemudi dibangun untuk mengendalikan dinamika kendaraan yang disusun secara kaskade yaitu Fuzzy Logic Control (FLC) sebagai kontrol utama untuk menghilangkan kesalahan lateral motion terhadap desired trajectory, serta untuk menentukan setting point pada kontrol berikutnya yaitu Proportional–Integral–
Derivative controller (PID) sebagai kontrol penyempurna dari kontrol utama yang
berfungsi untuk menekan kesalahan yaw motion. Parameter sistem kontrol baik FLC maupun PID dioptimisasi menggunakan Quantum Behaved Partikel Swarm Optimization (QPSO) sebagai metode optimisasi yang lebih menjamin tercapainya global convergence dari pada menggunakan Partikel Swarm Optimization (PSO)
sehingga diperoleh parameter yang optimal untuk menentukan lebar dan posisi dari membership function pada FLC dan konstanta gain dari kontroler PID.
Dinamika kendaraan direpresentasikan dalam model kendaraan yang dibangun berdasarkan 10 Degree of Freedom (DOF) dari dinamika kendaraan, terdiri dari 7-DOF vehicle ride model (pergerakan kendaraan; rolling, pitching, bounching dan vertical displacement each wheel) dan 3-DOF vehicle handling model (longitudinal motion, lateral motion dan yaw motion).
Pengujian dilakukan menggunakan Software In the Loop Simulations (SILS)
dengan input desired trajectory berupa look up table (x– y) yang merepresentasikan manuver kendaraan berliku (double lane change). Hasil pengujian Software In the
Loop Simulation (SILS) menggunakan sistem FLC dan PID yang di-tuning dengan
QPSO pada kecepatan kendaraan antara 10 – 70 Km/h dapat dipertahankan menurut
desired trajectory dengan rata-rata C-RMS error yang lebih kecil dibanding dengan
menggunakan sistem FLC dan PID yang di-tuning dengan PSO (FL-PID tuned PSO), yaitu rata-rata lateral motion error = 0,010562 dan rata-rata yaw motion error = 0,065053. Hasil pengujian SILS selanjutnya diverifikasi menggunakan pengujian
Hardware In the Loop Simulations (HILS) yang merepresentasikan pergerakan steer
pada kendaraan yang sebenarnya. Hasil pengujian HILS menunjukkan bahwa pergerakan kendaraan dapat dipertahankan menurut desired trajectory (double lane
change) dengan rata-rata C-RMS error 0,015965 untuk lateral motion dan 0,095685
untuk yaw motion, nilai rata-rata C-RMS error tersebut lebih besar 51.16% untuk
lateral motion dan 47.08% untuk yaw motion terhadap hasil pengujian SILS.
Optimization of Fuzzy Logic and PID Cascade control system in the
vehicle with a Steer By Wire System uses Quantum behaved Particle
Swarm Optimization
By : Fachrudin
Student Identity Number : 2209301010
Supervisor : Prof. Dr. Ir. Imam Robandi, MT. Co- Supervisor : Prof. Ir. Nyoman Sutantra, M.Sc., Ph.D.
ABSTRACT
This study to optimize the parameters of the control system on the steering system of a vehicle with a fully automatic steer-by-wire system. Steering control system constructed to control the dynamics of the vehicle are arranged in a cascade consists of Fuzzy Logic Control (FLC) as the main control to eliminate errors lateral motion of the desired trajectory, as well as to determine the setting point in the the next control is Proportional-Integral-Derivative controller (PID) as falsifies control of the main control that serves to suppress the yaw motion errors. Both FLC and PID optimized using Quantum behaved Particle Swarm Optimization (QPSO) as a method of optimization which better ensure the achievement of global convergence than using Particle Swarm Optimization (PSO), thus gained control system parameters that optimal, namely parameter to determine the width and position of the membership function in the FLC and the constant gain of the PID controller.
Vehicle dynamics represented in the model vehicle built by 10 Degree of Freedom (DOF) from the dynamics of a vehicle, consisting of a 7-DOF vehicle ride model (the movement of vehicles; rolling, pitching, bounching and vertical displacement of each wheel) and 3-DOF vehicle handling models (longitudinal motion, lateral motion and yaw motion).
The test were performed using Software In the Loop Simulations (SILS) with input desred trajectory in the form of look-up tables (x - y), which represents the winding vehicle maneuver (double lane change). The results of Software In the Loop Simulation (SILS) using a system of FLC and PID tuned by QPSO in the vehicle speed between 10-70 km/h can be maintained according to the desired trajectory with an average C-RMS error is smaller compared with the system of FLC and PID tuned by PSO (FL- PID tuned by PSO), ie an average of the lateral motion error = 0.010562 and the average of yaw motion error = 0.065053. Then performed the Hardware In the Loop Simulations (HILS) representing the movement of a steer in the the actual vehicle. The results of HILS shows that the movement of the vehicle can be maintained according to the desired trajectory (double lane change) with an average C-RMS error to lateral motion 0.015965 and 0.095685 for the yaw motion, the average value of the C-RMS error 51.16 % greater for lateral motion and 47.08% for the yaw motion of the test results of SILS.
DAFTAR ISI
KATA PENGANTAR...
i
ABSTRAK...
ii
DAFTAR ISI...
iii
DAFTAR GAMBAR ...
v
DAFTAR TABEL ...
vi
BAB 1
PENDAHULUAN...
1 1.1. Latar Belakang ... 1 1.2. Rumusan Masalah... 5 1.3. Tujuan Penelitian ... 6 1.4. Orisinalitas Penelitian ... 6 1.5. Kontribusi Penelitian ... 8BAB 2
KAJIAN PUSTAKA DAN DASAR TEORI ...
112.1. Model Dinamika Kendaraan... 11
2.1.1. Model Ride Kendaraan... 12
2.1.2. Model Handling Kendaraan ... 14
2.1.3. Model Simplified Calspan tyre ... 15
2.2. Proportional–Integral–Derivative (PID) controller... 17
2.2.1. Kontrol Proporsional (P) ... 18
2.2.2. Kontrol Integratif (I) ... 18
2.2.3. Kontrol Derivatif (D) ... 18
2.3. Fuzzy Logic Control (FLC) ... 19
2.3.1. Konfigurasi Dasar Fuzzy Logic Control (FLC) ... 19
2.3.2. Strategi Fuzzifikasi ... 20
2.3.3. Basis Pengetahuan ... 21
2.3.4. Logika Pengambilan Keputusan ... 25
2.3.5. Strategi Defuzzifikasi... 25
2.3.6. Sistem Umpan Balik Fuzzy Logic... 26
2.4. Particle Swarm Optimization (PSO)... 29
2.4.1. Filosofi PSO ... 30
2.4.2. Tahapan–tahapan dalam PSO ... 30
2.5. Quantum Behaved Particle Swarm Optimization (QPSO) ... 35
2.5.1. Perbedaan Algoritma PSO dan QPSO ... 37
BAB 3
METODE PENELITIAN ...
413.1. Perancangan Model Kendaraan ... 42
3.2. Perancangan Sistem Kontrol (Outer Loop) ... 43
3.3. Perancangan Strategi Kontrol ... 44
3.4. FLC sebagai Kontrol Utama... 44
3.4.1 Fuzzifikasi ... 45
3.4.2 Rule Base... 47
3.4.3 Defuzzifikasi... 48
3.5. Kontrol PID sebagai Kontrol Kedua... 48
3.6. Perancangan Sistem Optimisasi... 49
3.7. Optimisasi... 52
3.8. Pengujian Software in the Loop Simulation (SILS)... 55
3.9. Pengujian Hardware in the Loop Simulation (HILS) ... 55
BAB 4
HASIL DAN PEMBAHASAN ...
574.1. Model Kendaraan... 57
4.1.1. Ride Model ... 58
4.1.2. Handling model ... 62
4.1.3. Tire model... 65
4.2. Sistem kontrol kemudi kendaraan (outer loop control) ... 68
4.2.1. FLC sebagai sistem kontrol lateral motion ... 69
4.2.2. Kontrol PID sebagai sistem kontrol yaw motion ... 71
4.3. Simulasi Sistem kontrol kemudi kendaraan (manual tuned)... 72
4.4. Optimisasi Sistem Kontrol ... 74
4.4.1. Optimisasi menggunakan PSO ... 75
4.4.2. Optimisasi menggunakan QPSO ... 80
4.5. Pengujian Software In the Loop Simulation (SILS)... 83
4.6. Pengujian Hardware In the Loop Simulations (HILS) ... 90
BAB 5
KESIMPULAN DAN SARAN ...
985.1. Kesimpulan... 98 5.2. Saran... 100
DAFTAR PUSTAKA ...
101DAFTAR INDEK ...
105DAFTAR SIMBOL...
109DAFTAR SINGKATAN...
111LAMPIRAN:
Lampiran: Rig of Hardware in the Loop Simulation (HILS)
BIOGRAFI PENULIS
DAFTAR GAMBAR
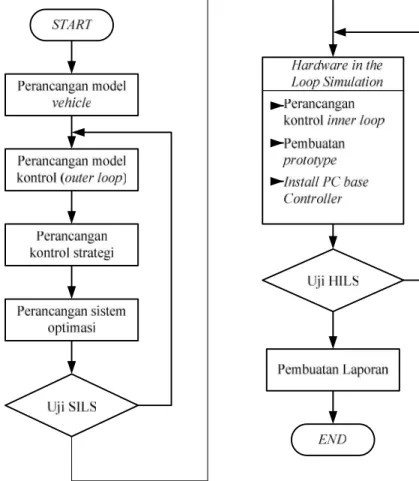
Gambar. 1.1. Diagram Alir Road Map Penelitian
...
9Gambar. 1.2. Diagram Alir Skema Road Map Optimisasi Sistem Kontrol
..
10Gambar. 2.1. Model ride kendaraan
...
12Gambar. 2.2. Model handling kendaraan ... 14
Gambar. 2.3. Kontrol PID... 16
Gambar. 2.4. Konfigurasi Dasar FLC ... 19
Gambar. 2.5. Hubungan antara variabel, label dan fungsi keanggotaan ... 21
Gambar. 2.6. Sistem kontrol loop tertutup dari FLC... 26
Gambar. 2.7. Sistem dengan tanggapan step ... 27
Gambar. 2.8 Type-1 Fuzzy Inference System Mamdani... 29
Gambar. 2.9. Daerah pencarian dengan dua buah variable ... 31
Gambar. 2.10. Inisialisasi partikel... 32
Gambar. 2.11. Pemutakhiran Kecepatan dan Posisi pada PSO ... 34
Gambar. 3.1. Diagram Alir Metode Penelitian ... 41
Gambar. 3.2. Model kendaraan pada aplikasi software SIMULINK... 43
Gambar. 3.3. Model Sistem Kontrol ... 43
Gambar. 3.4. Model strategi sistem kontrol... 44
Gambar. 3.5. Membership Function Triangular ... 46
Gambar. 3.6. Membership Function Trapesoidal... 47
Gambar. 3.7. PID control ... 49
Gambar. 3.8. Parameter MF triangular... 50
Gambar. 3.9. Parameter MF trapezoidal ... 50
Gambar. 3.10. Perubahan lebar dan Posisi MF... 51
Gambar. 3.11. Diagram alir optimisasi menggunakan PSO ... 53
Gambar. 3.12. Diagram alir optimisasi menggunakan QPSO ... 54
Gambar. 3.13. Inner Loop Control dan Outer Loop Control ... 56
Gambar. 4.1. Model simulink kendaraan dengan 10 DOF ... 57
Gambar. 4.2. Model vertical direction dari roda kendaraan... 59
Gambar. 4.3. Model bounching dari body kendaraan ... 60
Gambar. 4.4. Model rolling dari body kendaraan ... 61
Gambar. 4.5. Model pitching dari body kendaraan ... 61
Gambar. 4.6. Model lateral acceleration ... 63
Gambar. 4.7. Model longitudinal acceleration ... 64
Gambar. 4.8. Model yaw motion... 65
Gambar. 4.9. Model Tire ... 66
Gambar. 4.10. Subsystem dari model yaw motion ... 67
Gambar. 4.11. Outer loop control sistem kemudi kendaraan ... 69
Gambar. 4.12. Desired trajectory ... 69
Gambar. 4.13. Membership Function (MF) dengan manual tuned... 70
Gambar. 4.14. Desired dan actual trajectory ... 72
Gambar. 4.15.Lateral Motion Error... 73
Gambar. 4.16. Setting point dan output dari Yaw Motion ... 73
Gambar. 4.17.Yaw Motion Error ... 74
Gambar. 4.18.Struktur optimisasi sistem kontrol dari sistem kemudi kendaraan... 74
Gambar. 4.19. Grafik konvergensi dari algoritma PSO ... 78
Gambar. 4.20. MF optimal menggunakan QPSO ... 79
Gambar. 4.21. Grafik konvergensi dari algoritma PSO dan QPSO ... 82
Gambar. 4.23. Desired dan Actual Trajectory (SILS) ... 84
Gambar. 4.24. Lateral Motion Error... 85
Gambar. 4.25. Yaw Motion Error ... 86
Gambar. 4.26. Left Manuver ... 86
Gambar. 4.27. Right Manuver... 87
Gambar. 4.28.Error Lateral Motion... 87
Gambar. 4.29. Setting point of Yaw motion ... 88
Gambar. 4.30. Output Yaw Motion ... 88
Gambar. 4.31.Error Yaw Motion... 89
Gambar. 4.32. Output Yaw Control System ... 89
Gambar. 4.33. Outer Loop Control ... 90
Gambar. 4.34. Inner Loop Control... 91
Gambar. 4.35. Driver Motor Stepper ... 91
Gambar. 4.36. Motor Stepper ... 92
Gambar. 4.37. Rotary Encoder ... 92
Gambar. 4.38. Driver Motor Stepper ... 92
Gambar. 4.39. Driver Rotary Encoder ... 93
Gambar. 4.40. Microcontroller Arduino Uno ... 93
Gambar. 4.41. Blok diagram HILS ... 94
Gambar. 4.42. Input inner loop control... 95
Gambar. 4.43. Output inner loop control ... 95
Gambar. 4.44. Desired dan Actual Trajectory (HILS) ... 96
DAFTAR TABEL
Tabel. 2.1. Kaidah Atur FLC...
28Tabel. 2.2. Karakteristik fitness terhadap partikel... 33
Tabel. 3.1. Rule base dari FLC ... 47
Tabel. 4.1. Parameter experimental vehicle ... 67
Tabel. 4.2 Parameter. Tire ... 68
Tabel. 4.3. Parameter Membership Function... 70
Tabel. 4.4. Parameter sistem kontrol dan C-RMS error ... 72
Tabel. 4.5. Range parameter sistem kontrol ... 76
Tabel. 4.6. Hasil Optimisasi PSO (speed = 2.77 m/s) ... 78
Tabel. 4.7. Parameter MF optimal menggunakan PSO ... 79
Tabel. 4.8. Hasil optimisasi QPSO (speed = 2.77 m/s) ... 81
Tabel. 4.9. Parameter MF optimal menggunakan QPSO ... 83
Tabel. 4.10. Hasil optimisasi PSO dan QPSO (speed = 2.77 m/s)... 84
Tabel. 4.11. C-RMS Error Sistem Kontrol Optimal (SILS) ... 85
Tabel. 4.12. C-RMS Error Sistem Kontrol Optimal (HILS) ... 96
BAB 1
PENDAHULUAN
1.1. Latar Belakang
Sistem Steer by Wire (SbW) adalah bagian dari perkembangan teknologi mobil listrik yang diharapkan menjadi kendaraan masa depan dengan kinerja kontroler yang tinggi [1]. Pada sistem SbW, hubungan konvensional pada sistem kemudi kendaraan ditiadakan, yang berarti hubungan mekanis antara kemudi roda (wheel steer) dan roda depan pada kendaraan dihapus dan digantikan oleh penggerak elektris [2]. Terdapat dua jenis karakteristik sistem SbW yang digunakan yaitu semi-automatic dan fully automatic. Semi-automatic adalah sistem yang masih menggunakan roda kemudi sebagai masukan sistem kontrol untuk menentukan arah roda depan kendaraan [3], sistem ini bermanfaat untuk mengontrol roda kemudi secara aktif, meningkatkan stabilitas dinamika dan manuver kendaraan serta dapat diterapkan sebagai kontroler kemudi untuk membantu pengemudi, walaupun dilakukan oleh pengemudi yang belum berpengalaman, sehingga pengemudi memiliki kemampuan perseptif yang lebih baik untuk mengendalikan kendaraan dan merespon lebih cepat dengan tindakan kompensasi yang halus [4]. Sedangkan fully automatic adalah sistem tanpa menggunakan roda kemudi sehingga tidak diperlukan seorang pengemudi, namun untuk menentukan arah roda depan kendaraan digunakan lintasan (trajectory) yang telah diprogram [5]. Banyak penelitian telah dikembangkan pada fully
automatic SbW system antara lain penelitian yang dikhususkan pada input
trajectory yang menggunakan look-ahead and look-down systems [6],
menggunakan teknologi Global Positioning System (GPS) [7] dan trajectory yang menggunakan lane guidance [5]. Berbagai pengujian SbW system telah dilakukan antara lain pada kendaraan sebenarnya [5], [8], small vehicle [9], [10],
experiment vehicle [11], [12] maupun pada model kendaraan yang merupakan
kumpulan persamaan matematis dari dinamika kendaraan [13], [14], road map tentang sistem SbW seperti pada Gambar 1.1. dan 1.2. Simulasi dan pola
pengujian dengan menggunakan model kendaraan secara matematis memiliki beberapa kelebihan antara lain parameter kendaraan dapat menyesuaikan pada kendaraan sebenarnya secara utuh, hemat biaya, perlakuan pengujian yang berulang-ulang tidak beresiko pada kecelakaan dan derajat kebebasan (Degree of
Freedom - DOF) pergerakan dari dinamika kendaraan sangat bervariabel
menyesuaikan terhadap kebutuhan [14].
Pergerakan kendaraan dalam arah horisontal memiliki dua koordinat dalam arah pergerakan longitudinal (longitudinal motion) dan lateral (lateral
motion). Dalam hal kendaraan sedang melaju ke arah longitudinal dan kemudian
melakukan manuver maka pergerakan dinamika kendaraan dapat direpresentasikan pada pergerakan ke arah lateral dan pergerakan yaw (yaw
motion) [15]. Arah pergerakan longitudinal kendaraan harus selalu diupayakan
bergerak maju untuk berada tepat searah pada jalur yang ditetapkan, bila terjadi pergeseran pergerakan kendaraan ke arah samping atau tidak sesuai dengan jalur yang ditetapkan berarti terjadi kesalahan lateral motion. Untuk mempertahankan atau memperkecil kesalahan lateral motion maka diperlukan lateral motion
control [16]. Pada saat pergerakan kendaraan membelok atau manuver
dimungkinkan terjadi perbedaan gaya longitudinal pada roda kanan dan kiri sehingga kendaraan mengalami yaw motion yang bersumbu pada Centre of
Gravity (CoG) atau pergerakan kendaraan memutar yang bersumbu pada sumbu
vertikal dari CoG untuk mengurangi kesalahan yaw motion maka kendaraan memerlukan yaw motion control [17]. Dalam perkembangan peningkatan sistem keselamatan secara aktif dan untuk mengantisipasi perilaku nonlinier, maka diperlukan kontroler pergerakan longitudinal, lateral motion control dan yaw
motion control yang representatif dari dinamika kendaraan.
Suatu sistem kontrol dibangun dengan tujuan untuk menghasilkan aksi kontroler yang cepat dengan error yang kecil. Sistem kontrol konvensional yang umum dan cukup handal digunakan pada sistem yang linier adalah kontroler
Proportional, Integral dan Derivative (PID) [18]. Sistem kontrol PID mempunyai
keunggulan rise time yang cepat, mampu memperkecil error maupun meredan
dapat menyebabkan overshoot yang terlalu tinggi atau settling time yang semakin lama [19].
Sistem kontrol berbasis teknik kecerdasan buatan (Artificial Intellegence) memberikan wacana dan inspirasi dalam penggunaan sistem kontrol karena dapat melakukan pekerjaan seperti dan sebaik yang dilakukan oleh manusia. Aplikasi
Artificial Intellegence berbasis perilaku (behavior-based controller) menjadi
alternatif utama untuk digunakan sebagai sistem kontrol kemudi [20] karena memiliki keuntungan dapat mempercepat proses optimisasi pada sistem kontrol dan mengerjakan beberapa task dengan lebih cepat, konsisten dan teliti [9].
Beberapa aplikasi Artificial Intellegence telah digunakan pada sistem kontrol maupun optimisasi, seperti; Fuzzy Logic Control (FLC), Neural Network (NN) maupun Genetic Algorithm (GA). NN dan GA merupakan metode optimisasi yang dapat digunakan dengan baik untuk menala parameter FLC secara
realtime tetapi keduanya memiliki kelemahan yaitu struktur sistem optimisasi
yang komplek dan memerlukan memori besar untuk proses komputasi secara on
line sehingga menjadikan proses mencapai konvergensi semakin lambat [10]. FLC
merupakan metode sistem kontrol yang handal untuk mengendalikan sistem yang nonlinier [14] tetapi untuk memperoleh parameter yang dibutuhkan oleh FLC bukanlah pekerjaan mudah. Oleh karena itu, diperlukan proses pelatihan dan pembelajaran (training and learning) dengan menggunakan metode optimisasi untuk menala parameter-parameter FLC [20].
Dalam perkembangan teknologi optimisasi, Kennedy dan Eberhart pada 1995 memperkenalkan metode optimisasi berbasis perilaku yang lebih sederhana dan cepat mencapai konvergensi yaitu metode Particle Swarm Optimization (PSO) [21]. PSO adalah teknik optimisasi dengan mensimulasikan perilaku sosial makhluk hidup (behave based), seperti sekawanan ikan atau burung, yang bergerak sesuai dengan tujuan tertentu [22]. Anggota (individu) pada suatu swarm merupakan sebuah partikel yang merepresentasikan suatu solusi potensial pada suatu permasalahan yang diselesaikan dan memiliki nilai terbaik (pbest) berdasarkan posisinya serta nilai terbaik kelompok (gbest) di antara nilai terbaik posisinya (pbest). Keseluruhan nilai terbaik diperoleh berdasarkan fungsi terbaik (fitness function) untuk setiap solusi. Setiap partikel berupaya dari waktu ke waktu
untuk memodifikasi posisinya menggunakan kecepatan dan posisi sesaatnya [22]. Secara umum, PSO telah terbukti sebagai metode yang efisien menyelesaikan banyak permasalahan optimisasi [21] tetapi kelemahan PSO adalah cenderung untuk mencapai konvergensi pada local optimal yang terlalu cepat, sehingga hasil yang diperoleh bukan merupakan global optimal [23]. Dalam upaya untuk menjamin tercapainya global optimal, Jun Sun, et al., 2004 memperbaiki algoritma PSO dengan memberikan suatu inovasi terhadap fungsi posisi dari partikel yang disebar dalam metode PSO berdasarkan mekanika kuantum. Pada mekanika klasik, partikel digambarkan oleh vektor posisi dan vektor kecepatan yang menentukan lintasan partikel, sedangkan dalam mekanika Newton, partikel hanya bergerak sepanjang lintasan yang ditentukan tetapi hal ini tidak terjadi dalam mekanika kuantum karena istilah lintasan menjadi tidak berarti lagi sehingga posisi dan kecepatan partikel tidak bisa ditentukan secara bersamaan sesuai dengan prinsip ketidakpastian. Dengan menggunakan metode Monte Carlo sebagai fungsi perubahan posisi (position update) yang dikarakteristikkan sebagai fungsi gelombang (wave function) dari tiap partikel akan menjamin tercapainya
global convergence yang selanjutnya metode ini disebut Quantum behaved
Particle Swarm Optimization (QPSO) [23]–[25].
Berdasarkan uraian tentang perkembangan sistem kontrol pada sistem kemudi kendaraan dan metode optimisasi maka diperlukan suatu usaha untuk meningkatkan Performance fully automatic SbW system, melalui pengembangan kombinasi sistem kontrol dengan metode optimisasi yang mempertimbangkan kesederhanaan proses optimisasi, proses komputasi, dan strategi sistem kontrol yang responsif. Pada penelitian ini dikembangkan sistem kontrol optimal berbasis
Artificial Intellegence yang di terapkan pada model fully automatic SbW system.
Strategi sistem kontrol yang dikembangkan terdiri dari dua tahap secara kaskade yaitu kontroler lateral motion untuk menghilangkan pergerakan lateral yang tidak diinginkan dan kontroler berikutnya yaitu kontroler yaw motion sebagai penyempurna sistem kontrol pada steering input. Struktur sistem kontrol yang dibangun menggunakan FLC sebagai kontroler utama pada kontroler lateral
motion dan kontroler PID sebagai kontroler lanjutan pada kontroler yaw motion.
parameter sistem kontrol baik FLC maupun PID menggunakan metode QPSO sehingga diperoleh parameter sistem kontrol yang optimal yaitu parameter untuk menentukan lebar dan posisi dari membership function pada FLC dan konstanta gain dari kontroler PID yang optimal. Metode optimisasi QPSO dipilih sebagai metode optimisasi yang lebih menjamin tercapainya global convergence dari pada menggunakan PSO, sehingga dengan diperolehnya parameter optimal dari membership function dan konstanta gain maka sistem kontrol secara kaskade FLC dan PID akan bekerja secara optimal dalam mengendalikan sistem kemudi kendaraan.
Pengujian dilakukan melalui Software In the Loop Simulations (SILS) dan secara real time simulation yang disebut Hardware In the Loop Simulations (HILS) dengan input berupa desired trajectory (Double lane change). Keuntungan HILS adalah prototipe dibangun terdiri dari sistem mekanik kemudi kendaraan sampai dengan penggerak arah roda depan sehingga tidak memerlukan kendaraan secara nyata atau utuh, lebih ekonomis, tidak beresiko kecelakaan walaupun dilakukan berulang-ulang dan data yang diperoleh adalah real. Sebagai representasi dari dinamika kendaraan dibangun model kendaraan dengan 10-DOF dalam MATLAB-Simulink yang terdiri dari 7-DOF model ride kendaraan (rolling, pitching, bounching dan vertical displacement each wheel) dan 3-DOF model handling kendaraan (longitudinal motion, lateral motion dan yaw motion). Hasil simulasi active steering control menunjukkan bahwa dengan penggunaan FLC dan PID kontroler yang dituning dengan QPSO dapat meningkatkan vehicle
dynamic performance. Ukuran performance dinyatakan dalam nilai Continues Root Mean Error (C-RMS) yang terkecil dari lateral motion error terhadap desired trajectory.
1.2. Rumusan Masalah
Berdasarkan model dinamika kendaraan dan untuk menentukan sudut kemudi (steer angle) sebagai tujuan kontroler maka pada penelitian ini dikembangkan sistem kontrol FLC dan PID yang dioptimisasi menggunakan QPSO sehingga didapatkan parameter sistem kontrol yang optimal untuk mengendalikan sistem kemudi kendaraan. Kendaraan direpresentasikan pada
model kendaraan dengan menggunakan fully automatic SbW system dengan 10 Degree Of Freedom (DOF) yang terdiri dari 7-DOF model ride kendaraan (rolling, pitching, bounching dan vertical displacement each wheel) dan 3-DOF model handling kendaraan (longitudinal motion, lateral motion dan yaw motion). Struktur sistem kontrol yang dikembangkan terdiri dari dua tahap secara kaskade yaitu FLC – QPSO sebagai kontroler lateral motion dan PID – QPSO sebagai kontroler yaw motion.
1.3. Tujuan Penelitian
Tujuan dari penelitian yang diusulkan adalah sebagai berikut:
- Mengembangkan sistem kontrol optimal pada active steering system
kendaraan dengan sistem SbW untuk mengurangi secara signifikan dinamika kendaraan yang disebabkan oleh lateral dan yaw motion pada kendaraan yaitu dengan meminimalkan lateral motion error, pengujian dilakukan melalui
Software In the Loop Simulations (SILS).
- Menerapkan metode optimisasi sistem kontrol cerdas pada active steering
control system dari model fully automatic SbW system untuk mempertahankan
pergerakan lateral kendaraan sesuai dengan lintasan yang ditentukan (desired
trajectory), pengujian dilakukan melalui Hardware In the Loop Simulations
(HILS).
1.4. Orisinalitas Penelitian
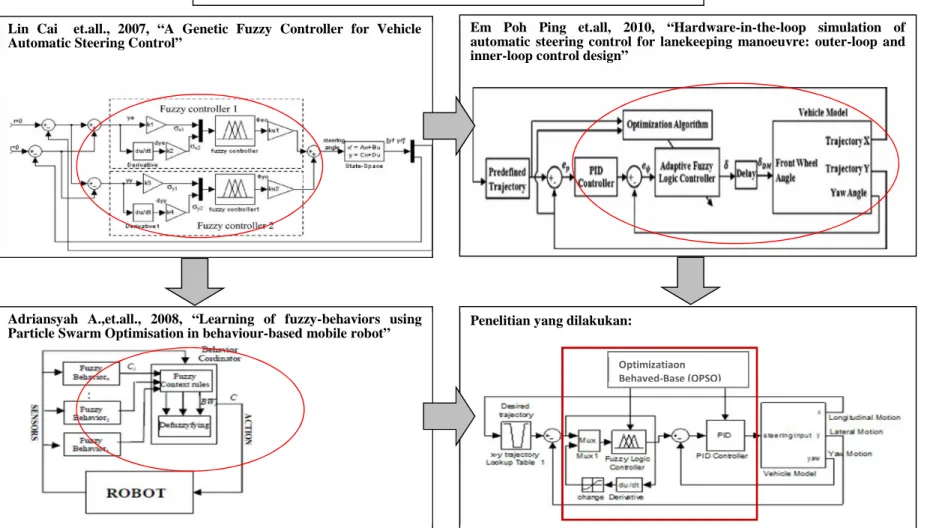
Banyak penelitian telah dilakukan pada fully automatic SbW system. Cai et al., 2007 mengembangkan sistem kontrol kemudi kendaraan otomatis pada suatu prototipe kendaraan (kendaraan uji skala kecil). Sistem kontrol yang dibangun menggunakan kontroler logika fuzzy (FLC) yang dioptimalkan dengan metode algoritma genetika (GA) menghasilkan kinerja sistem genetik-fuzzy yang lebih tinggi dari kontroler Proporsional Derivatif (PD) karena genetik-fuzzy
controller sangat cocok untuk sistem nonlinear. Metode GA juga digunakan oleh
peneliti sebelumnya yaitu Karbalaei et al., 2007 dan Kodagoda et al., 2002, namun sistem kontrol yang digunakan tanpa dioptimisasi melainkan ditentukan secara trial and error.
Pada tahun 2010, Ping et al., mengembangkan sistem kontrol pada SbW system dan dalam penelitiannya menyatakan bahwa optimisasi GA tidak dapat dilakukan dalam sistem online oleh karena itu selanjutnya dikembangkan dengan menggunakan neural network-back propagation, sehingga sistem kontrol dapat menyesuaikan dan menjaga agar tetap pada lintasan serta dapat menerima respon transient. Pengujian sistem kontrol kemudi yang dilakukan tidak menggunakan kendaraan uji skala kecil karena tidak mewakili dinamika kendaraan yang sebenarnya. Pengujian dilakukan pada model kendaraan dengan 9 DOF dari dinamika kendaraan dengan menggunakan software dan hardware in the loop simulations.
Sedangkan pada tahun 2008, Adriansyah dan Amin dalam penelitiannya tentang sistem kontrol pada mobile robot menyatakan bahwa metode optimisasi GA memerlukan banyak tahap dalam proses komputasinya sehingga kemudian digunakan particle swarm optimization (PSO) sebagai metode optimisasi yang bekerja tergantung pada posisi dan fungsi kecepatan. Metode optimisasi ini memiliki kesederhanaan dalam proses komputasi dan mempunyai kemampuan untuk mencapai konvergensi yang lebih cepat. Desain yang dilakukan pada sistem kontrol Fuzzy yang dioptimisasi dengan PSO (PSO-Fuzzy) mampu membuat robot bergerak seperti lintasan yang disyaratkan dan bisa mengkoordinasikan gerakan secara efektif sesuai dengan kondisi yang dihadapi.
Sementara itu perkembangan metode optimisasi PSO sejak tahun 2004, Jun Sun et al., memberikan inovasi mekanika kuantum pada metode PSO yang disebut Quantum behaved Particle Swarm Optimization (QPSO) sehingga mampu memperbaiki kelemahan PSO yang terlalu cepat mencapai local optimal yang bukan merupakan global optimal.
Berdasarkan perkembangan beberapa penelitian tersebut di atas maka pada penelitian ini dirancang model sistem kontrol yang dioptimisasi menggunakan QPSO. Struktur sistem kontrol terdiri dari FLC dan PID yang disusun secara kaskade untuk kontroler lateral motion dan yaw motion dari sistem kemudi kendaraan yang menggunakan fully automatic SbW system. Pengujian dilakukan pada model kendaraan yang direpresentasikan oleh 10 DOF melalui pengujian SILS dan HILS.
Pemilihan sistem kontroler FLC dan PID didasarkan oleh FLC merupakan sistem kontroler berbasis artificial intelligence yang memiliki keluwesan dalam pengaturan parameter fungsi keanggotaan dan mampu dengan baik diterapkan pada sistem yang nonlinier seperti model sistem kemudi kendaraan yang dirancang sehingga FLC digunakan sebagai kontroler utama untuk menekan error dari lateral motion terhadap desired trajectory, sedangkan kontroler PID sebagai kontroler sederhana yang memiliki keleluasaan pengaturan parameter kontrol sehingga digunakan sebagai kontroler lanjutan untuk lebih memperkecil error yang dihasilkan dari output kontroler FLC karena dengan telah diperkecilnya error dari lateral motion, berarti kendaraan sama halnya sudah tidak mengalami yaw motion sehingga output FLC digunakan sebagai setting point dari kontroler PID. Penggunaan QPSO sebagai metode optimisasi dikarenakan QPSO merupakan metode optimisasi yang mampu menjamin tercapainya konvergensi lebih baik dari pada PSO. Pengujian dilakukan pada model kendaraan melalui SILS dan HILS untuk menghindari resiko kecelakaan.
Adapun Road map penelitian seperti ditunjukkan pada Gambar 1.1, dan Gambar 1.2 adalah road map skema optimisasi sistem kontrol.
1.5. Kontribusi Penelitian
- Model sistem kontrol optimal menggunakan FLC dan kontroler PID yang dioptimisasi menggunakan QPSO pada sistem kemudi kendaraan dengan fully
automatic of SbW system sehingga mampu mengurangi secara signifikan error
dinamika kendaraan yang disebabkan oleh lateral dan yaw motion pada kendaraan.
- Prototipe sistem kemudi aktif kendaraan menggunakan sistem SbW untuk menguji dan mengevaluasi strategi optimisasi sistem kontrol yang optimal sehingga pergerakan kendaraan dapat selalu dipertahankan sesuai dengan
Lin Cai et.all., 2007, “A Genetic Fuzzy Controller for Vehicle Automatic Steering Control”
1. Paper ini mengembangkan sistem kontrol pada Vehicle Automatic Steering Control dengan kendaraan
uji skala kecil,
2. Sistem kontrol yang dibangun menggunakan FLC yang dioptimisasi menggunakan metode Genetic
Algorithm (GA). Metode GA digunakan sebagai pengembangan paper sebelumnya yaitu Karbalaei et.all., 2007 dan Kodagoda et.all., 2002 keduanya tidak menggunakan metode optimisasi atau tuning
melainkan ditentukan secara trial and error.
3. Hasil eksperimen: Performansi sistem Fuzzy Genetic lebih unggul dibandingkan Kontrol PD, karena
Fuzzy Genetic adalah pengendali nonlinier yang sangat cocok untuk sistem nonlinier.
Em Poh Ping et.all, 2010, “ Hardware-in-the-loop simulation of automatic steering control for lanekeeping manoeuvre: outer-loop and
inner-loop control design”
1. Kendaraan skala kecil belum merepresentasikan dinamika kendaraan yang sebenarnya maka digunakan model kendaraan
dengan 9 DOF dan pengujian dilakukan secara SILS dan HILS sehingga lebih murah,
dapat dilakukan berulang-ulang tanpa resiko kecelakaan dan data yang diperoleh adalah real.
2. Optimisasi GA tidak dapat dilakukan secara on
line maka dikembangkan menjadi optimisasi
secara on line menggunakan Neural Network–
Back Propagation.
3. Hasil Simulasi : Performansi sistem kontrol kombinasi PID (heading control) dan FLC
(2nd control) secara baik dapat menyesuaikan
lane keeping dan acceptable terhadap transient response.
Adriansyah A.,et.all., 2008, “Learning of
fuzzy-behaviors using Particle Swarm
Optimisation in behaviour-based mobile
robot”
1. Metode optimisasi GA memerlukan banyak tahapan dalam proses komputasinya, metode ini disederhanakan menggunakan metode PSO, PSO merupakan jenis metode optimisasi
yang sederhana, kemampuan mencapai konvergensi yang cepat, dan menghasilkan solusi yang berkualitas tinggi. PSO adalah metode optimisasi yang tergantung dari fungsi
posisi dan kecepatan.
2. Hasil eksperimen: algoritma perancangan
PSO-Fuzzy mampu membuat robot
(kendaraan skala kecil) bergerak berdasarkan perilaku yang dirancang dan
dapat mengkoordinasikannya sesuai dengan kondisi yang dihadapi secara efektif.
Penelitian yang dikembangkan: memperbaiki kelemahan yang terdapat pada paper Adriansyah
A.,et.all., 2008 [44] dan Em Poh Ping et.all, 2010.
1. Kelemahan PSO, cenderung terlalu cepat mencapai konvergensi pada local optima dan tidak menjamin
global convergence. QPSO merupakan metode optimisasi yang hanya tergantung pada sifat dari fungsi posisi saja sehingga lebih menjamin global convergence.
2. Bila dibandingkan dengan GA maupun NN, proses komputasi QPSO lebih sederhana, lebih cepat dan tidak membutuhkan memori yang besar.
3. Kontrol PID adalah kontrol linier sehingga kurang tepat bila digunakan sebagai heading control pada sistem yang nonlinier, maka FLC sebagai kontrol nonlinier lebih tepat digunakan sebagai heading
control pada sistem nonlinier dan kontrol PID lebih tepat secara kaskade digunakan sebagai
penyempurna (2nd control) pada respon sistem kontrol.
4. Untuk merepresentasikan dinamika kendaraan yang sebenarnya, dirancang model dinamika
kendaraan dengan 10 DOF, dan pengujian dilakukan secara SILS dan HILS karena tidak
memerlukan kendaraan secara utuh, biaya murah, dapat dilakukan berulang-ulang tanpa resiko kecelakaan dan data yang diperoleh adalah real.
Penelitian yang diusulkan adalah mengembangkan strategi optimisasi sistem kontrol menggunakan
QPSO. Sistem kontrol yang dibangun secara kaskade, yaitu FLC (heading control) dan kontrol PID (2nd control). Pengujian dilakukan secara SILS dan HILS sebagai prototipe Vehicle Automatic Steering Control dan hasil yang diharapkan dapat meningkatkan performa dinamik kendaraan.
ROADMAP OF VEHICLE AUTOMATIC STEERING CONTROL
PENGEMBANGAN METODE OPTIMISASI BEHAVED-BASE
PENGEMBANGAN PLANT REAL VEHICLE MODEL- BASE
PENGEMBANGAN METODE OPTIMISASI DAN PLANT (BEHAVED-BASE DAN REAL VEHICLE MODEL- BASE)
10
Lin Cai et.all., 2007, “A Genetic Fuzzy Controller for Vehicle
Automatic Steering Control”
Em Poh Ping et.all, 2010, “Hardware-in-the-loop simulation of
automatic steering control for lanekeeping manoeuvre: outer-loop and
inner-loop control design”
Adriansyah A.,et.all., 2008, “Learning of fuzzy-behaviors using
Particle Swarm Optimisation in behaviour-based mobile robot” Penelitian yang dilakukan:
ROADMAP OF VEHICLE AUTOMATIC STEERING CONTROL SCHEME
Gambar 1.2 Diagram Alir Skema Road Map Optimisasi Sistem Kontrol
Optimizatiaon Behaved-Base (QPSO)
BAB 2
KAJIAN PUSTAKA DAN DASAR TEORI
Kajian teoritis yang dibahas pada bagian ini terdiri dari; konsep dinamika kendaraan sebagai dasar teori untuk membangun plant; dasar sistem kontrol yaitu kontroler PID dan FLC dan pada bagian akhir dibahas tentang dua metode optimisasi yaitu Particle Swarm Optimization (PSO) dan Quantum Behave
Particle Swarm Optimization (QPSO).
2.1. Model Dinamika Kendaraan
Berdasarkan pada konsep dinamika kendaraan, model kendaraan memiliki dua fungsi utama dalam kontrol pergerakan kendaraan, yaitu kontroler
lateral dan kontroler longitudinal [11]. Model yang dibangun pada penelitian ini
terutama berfokus pada pengendalian kontroler lateral. Penelitian ini merupakan simulasi pada software dan hardware untuk kontroler kemudi aktif menggunakan model kendaraan dengan 10-DOF yang terdiri dari 7-DOF model ride kendaraan dan 3-DOF model handling kendaraan [26], [27]. Model kendaraan terdiri dari
single sprung mass (body atau badan kendaraan) yang terhubung ke empat unsprung masses (roda kendaraan). Beberapa asumsi pemodelan yang ditinjau
adalah sebagai berikut: badan kendaraan ini dikelompokkan dalam suatu massa tunggal yang disebut sebagai sprung mass, gaya drag aerodinamis diabaikan, dan pusat roll adalah sama dengan pusat pitch yang terletak tepat pada center of
gravity (CoG) di bawah badan kendaraan. Rolling resistance yang disebabkan dari passive stabilizer bar dan fleksibilitas badan kendaraan diabaikan. Kendaraan
dianggap tetap berada di atas landasan pada setiap saat dan keempat roda tidak pernah kehilangan kontak dengan ground selama manuver.
2.1.1 Model Ride Kendaraan
Model Ride Kendaraan direpresentasikan sebagai sistem 7-DOF yang dinyatakan dalam 7 persamaan matematis, terdiri dari persamaan matematis pada badan kendaraan (single sprung mass) yang meliputi kebebasan pergerakan; pergerakan vertikal dari badan kendaraan (heaving), pergerakan mengangguk dari badan kendaraan (pitching), pergerakan bergoyang ke kanan-kiri dari badan kendaraan (rolling) dan pergerakan vertikal dari masing-masing roda (four
unsprung masses) [26], [27]. Suspensi antara sprung mass dan unsprung masses
dimodelkan sebagai peredam viskositas pasif dan elemen pegas. Sementara ban dimodelkan sebagai pegas linier sederhana tanpa redaman [28].
Mengacu pada Gambar 2.1, keseimbangan gaya pada sprung mass (heaving) diberikan sebagai berikut:
Bouncing (Heaving) of the car body (Zs)
̈ = −2 , + , − 2 , + , ̇ + 2 , − ,
+2 , − , ̇ + , + , ̇ , + ,
+ , ̇ , , + , ̇ , + , + , ̇ ,
+ + + + (2.1)
Pitching of the car body ()
̈ = 2 , − , + 2 , + , ̇ − 2 , − ,
−2 , − , ̇ − , − , ̇ , − ,
− , ̇ , + , + , ̇ , + , + , ̇ ,
− + + + (2.2)
Rolling of the car body ()
̈ = −0,5 , + , − 0,5 , + , ̇ + 0,5 , ,
+0,5 , ̇ , − 0,5 , , − 0,5 , ̇ , + 0,5 , ,
+0,5 , ̇ , − 0,5 , , − 0,5 , ̇ ,
+ + − + (2.3)
Vertical Direction for each wheel
̈ , = , + , ̇ − , − , ̇ + 0,5 , + 0,5 , ̇ − , + , − , ̇ , + , − (2.4) ̈ , = , + , ̇ − , − , ̇ − 0,5 , − 0,5 , ̇ − , + , − , ̇ , + , − (2.5) ̈ , = , + , ̇ + , + , ̇ + 0,5 , + 0,5 , ̇ − , + , − , ̇ , + , − (2.6) ̈ , = , + , ̇ + , + , ̇ − 0,5 , − 0,5 , ̇ − , + , − , ̇ , + , − (2.7)
2.1.2 Model Handling Kendaraan
Gambar. 2.2. Model handling kendaraan [26]
Model handling kendaraan direpresentasikan sebagai sistem 3-DOF yang berarti memiliki 3 persamaan matematis yang terdiri dari persamaan matematis pergerakan car body secara lateral dan longitudinal serta yaw motion [11], [29].
Lateral motion dan longitudinal motion merupakan pergerakan kendaraan
sepanjang sumbu x dan sumbu y yang dinyatakan dalam percepatan lateral (Ay) dan percepatan longitudinal (Ax) sehingga lateral motion (y) dan longitudinal
motion (x) dapat diperoleh dengan integrasi dua kali dari percepatan lateral dan longitudinal.
Percepatan lateral dan longitudinal dinyatakan sebagai berikut:
= − + − + +
(2.8)
= − + − + +
Pergerakan kendaraan secara angular yang bersumbu vertikal z disebut sebagai yaw motion (r) [26] yang dapat diperoleh dengan integrasi
r
danr
.̈ = 1 2 − 2 + 2 − 2 + 2 − 2
− − + + − −
+ + + + ] (2.10)
2.1.3. Model Simplified Calspan tyre
Tyre model yang digunakan dalam penelitian ini adalah model Calspan
karena mampu menggambarkan perilaku kendaraan dalam segala skenario mengemudi. Gaya longitudinal dan lateral yang dihasilkan oleh ban adalah fungsi dari sudut slip dan longitudinal slip dari ban relatif terhadap jalan. Dengan mendefinisikan fungsi saturasi, f(σ), untuk memperoleh kekuatan komposit dengan beban normal dan koefisien nilai gesekan [30], ekspresi polinomial fungsi saturasi disajikan oleh:
1 ) 4 ( ) ( 4 2 3 3 1 2 2 3 1 C C C C C F F f z c (2.11)
dengan C1, C2, C3 dan C4adalah konstanta parameter tertentu yang ditetapkan untuk ban. Panjang tire contact patch pada jalan dihitung dengan menggunakan dua persamaan berikut:
) 5 ( 0768 . 0 0 p w ZT z T T F F ap (2.12) z x a F F K ap 1 (2.13)
dengan
ap
adalah tire contact patch, Tw adalah lebar tapak yang menempel danTpadalah tekanan ban. FZTdan Kαadalah konstanta tire contact patch. Koefisien
stiffnes lateral dan longitudinal stiffness (Ks dan Kc,) adalah fungsi tire contact
2 2 1 1 0 2 0 2 A F A F A A ap Ks z z (2.14) FZ CS 2 2 0 z c F ap K (2.15) dengan A0, A1, A2 dan FZ
CSadalah konstanta stiffness [26], [30]. Selanjutnya
perhitungan composite slip menjadi: 2 2 2 2 0 2 1 tan 8 s s K K F ap c s z (2.16)
dengan µoadalah koefisien nominal dari gesekan dengan nilai 0.3 untuk kondisi jalan basah, dan 0.7 untuk kondisi jalan kering. Mengingat fungsi saturasi polinomial, lateral dan longitudinal stiffness, gaya lateral dan longitudinal yang dinormalisasi diturunkan dengan menyelesaikan gaya komposit ke sudut side slip dan komponen longitudinal slip ratio, maka:
Y S K K K f F F c s s z y 2 2 ' 2 2 tan tan (2.17)
2 2 ' 2 2 ' tan K S K S K f F F c s c z x (2.18)Gaya lateral memiliki komponen tambahan yang disebabkan oleh sudut
camber ban, γ, yang dimodelkan sebagai efek linear. Dalam kondisi manuver
yang signifikan dengan besar lateral slip dan longitudinal, gaya menyatu ke nilai. Untuk memenuhi kriteria ini, koefisien kekakuan longitudinal stiffness
dimodifikasi pada high slips untuk transisi ke koefisien lateral stiffness serta koefisien gesekan yang didefinisikan oleh parameter Kµ.
2 2 2 ' cos sin S K K K Kc c s c (2.19)
0 1K sin2 S2 cos2 (2.20)2.2 Proportional–Integral–Derivative (PID) controller
Di dalam suatu sistem kontrol dikenal adanya beberapa macam aksi control, diantaranya yaitu aksi kontroler Proportional (P), Integral (I) dan
Derivative (D). Masing-masing aksi kontroler tersebut mempunyai
keunggulan-keunggulan tertentu. Aksi kontroler proportional mempunyai keunggulan-keunggulan rise
time yang cepat, aksi kontroler integral mempunyai keunggulan untuk
memperkecil error, dan aksi kontroler derivative mempunyai keunggulan dapat meredam overshoot. Untuk itu agar dapat menghasilkan output dengan risetime yang tinggi dan error yang kecil, dapat menggabungkan ketiga aksi kontroler tersebut menjadi aksi kontroler PID [18].
Pada pemakaian suatu sistem kontrol dengan kecepatan dan keakuratan tinggi, maka pemakaian aksi kontroler PID mungkin masih dianggap kurang memuaskan, sebab jika pengendali di atur sangat sensitive maka overshoot yang dihasilkan akan semakin peka sehingga osilasi yang ditimbulkan akan lebih tinggi. Sedangkan bila pengendali diatur kurang peka, maka overshoot dapat diperkecil namun waktu yang dibutuhkan akan semakin lama, dan hal tersebut akan menjadi suatu masalah dalam suatu proses industri [18].
Gambar 2.3. Kontroler PID [18]
PID merupakan kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik umpan balik pada sistem tesebut. Komponen kontroler PID ini terdiri dari tiga jenis yaitu Proportional, Integratif dan Derivatif. Ketiga kontroler dapat dipakai bersamaan maupun sendiri-sendiri tergantung dari respon yang diinginkan terhadap suatu plant.
2.2.1 Kontroler Proporsional (P)
Kontroler P, jika G(s) = Kp, dengan Kpadalah konstanta. Jikau = G(s) •
e(t) maka:
u = Kp• e(t) (2.21)
Dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain (penguat) tanpa memberikan efek dinamik kepada kinerja kontroler. Penggunaan kontroler P memiliki berbagai keterbatasan karena sifat kontroler yang tidak dinamik. Walaupun demikian dalam aplikasi-aplikasi dasar yang sederhana kontroler P cukup mampu untuk memperbaiki respon transien khususnya rise time dan settling time.
2.2.2 Kontroler Integratif (I)
Jika G(s) adalah kontroler I maka u dapat dinyatakan sebagai;
( ) = ∫ ( ) (2.22)
Dengan Kiadalah konstanta Integral. Jika e(t) mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki
error. Jika e(t) mendekati nol maka efek kontroler I ini semakin kecil. Kontroler I
dapat memperbaiki sekaligus menghilangkan respon steady-state, namun
pemilihan Ki yang tidak tepat dapat menyebabkan respon transien yang tinggi sehingga dapat menyebabkan ketidakstabilan sistem. Pemilihan Ki yang sangat tinggi justru dapat menyebabkan output berosilasi karena menambah orde sistem.
2.2.3 Kontroler Derivatif (D)
Sinyal kontroler u yang dihasilkan oleh kontroler D dapat dinyatakan sebagai;
( ) = ( ( )⁄ ). (2.23)
Dari persamaan di atas, nampak bahwa sifat dari kontroler D ini dalam konteks "kecepatan" atau rate dari error. Dengan sifat ini ia dapat digunakan untuk memperbaiki respon transien dengan memprediksi error yang akan terjadi.
Kontroler Derivative hanya berubah saat ada perubahan error sehingga saat kontroler error statis ini tidak akan bereaksi, hal ini pula yang menyebabkan kontroler Derivative tidak dapat dipakai sendiri.
2.3 Fuzzy Logic Control (FLC)
Prinsip dasar FLC sebenarnya sangat sederhana. Bila pada pengontrol konvensional, sistem yang dikontrol dimodelkan secara analitis oleh sejumlah persamaan diferensial, yang solusinya menentukan aksi kontroler yang harus diberikan pada sistem, maka FLC didasarkan pada suatu model logika yang merepresentasikan proses berfikir seorang operator ketika sedang mengontrol suatu sistem [31]. Di sini terjadi suatu pergeseran dari pemodelan sistem yang dikontrol menjadi pemodelan cara berfikir operator.
FLC terbukti sukses dalam aplikasinya pada berbagai bidang industri sejak tahun 1980. Contoh aplikasi misalnya pada bidang kontroler robot [9], kontroler kecepatan maupun transmisi pada automobil dan sistem tenaga.
2.3.1 Konfigurasi Dasar Fuzzy Logic Control (FLC)
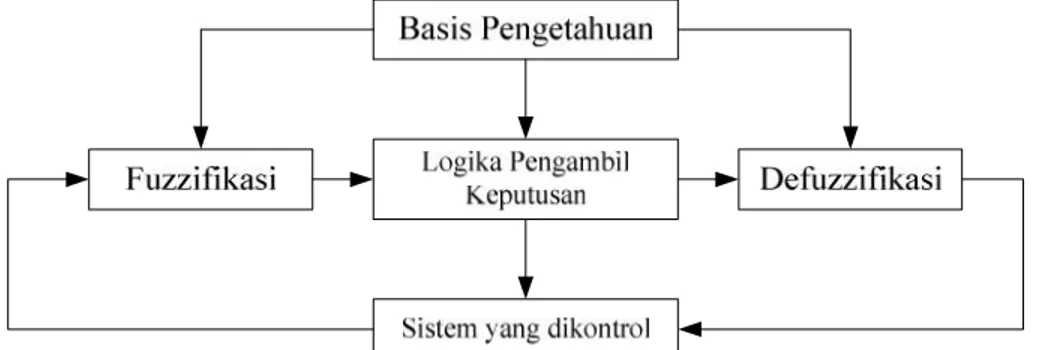
Gambar 2.4. memperlihatkan konfigurasi dasar suatu FLC yang menunjukkan empat komponen utama, yaitu masing-masing:
a. Fuzzifikasi
Fuzzifikasi bertujuan untuk mentransformasikan masukan nyata yang bersifat bukan fuzzy ke himpunan fuzzy.
b. Basis pengetahuan
Basis pengetahuan terdiri dari basis data dan basis kaidah atur. Basis data mendefinisikan himpunan fuzzy atas ruang-ruang masukan dan keluaran. Basis kaidah atur berisi kaidah-kaidah kontroler.
c. Logika pengambilan keputusan
Logika pengambilan keputusan adalah cara pengambilan keputusan dengan menggunakan implikasi fuzzy dan mekanisme penarikan kesimpulan.
d. Defuzzifikasi
Defuzzifikasi adalah proses pengubahan himpunan fuzzy ke sinyal yang bersifat bukan fuzzy.
2.3.2 Strategi Fuzzifikasi
Fuzzifikasi berhubungan dengan ketidakpastian dan ketakpresisian dalam bahasa natural. Fuzzifikasi merupakan transformasi dari data nyata (crisp) yang diperoleh dari pengukuran menjadi himpunan fuzzy dengan manipulasi data dalam logika pengambilan keputusan berbasis pada teori himpunan fuzzy. Tahap ini berhubungan dengan ketidakjelasan dan ketidaktelitian dalam bahasa natural dan merupakan peranan yang penting pada kasus dengan informasi yang tersedia mengandung ketidakpastian. Secara simbolis fuzzifikasi dapat ditulis sebagai berikut:
x = fuzzifier (xo) (2.24)
Dengan xo adalah masukan nyata (crisp) yang berasal dari sistem fisis, x adalah himpunan fuzzy, dan fuzzifier menyatakan operasi fuzzifikasi.
Pada dasarnya fuzzifikasi memiliki fungsi sebagai berikut: a. Mengukur nilai variabel masukan.
b. Melakukan pemetaan berskala yang merubah jangkauan dari nilai variabel masukan ke dalam semesta pembicaraan yang bersangkutan
c. Merumuskan fungsi fuzzifikasi yang merubah data masukan ke dalam nilai linguistik yang sesuai, yang akan digunakan sebagai label dari himpunan
fuzzy.
Hubungan antara variabel, label dan tingkat keanggotaan dalam himpunan fuzzy dengan fungsi keanggotaan triangular dapat dilihat pada Gambar 2.5. Variabel yang digunakan sebagai contoh adalah besar perubahan dalam suatu pengukuran data dari‘Negatif Besar’ sampai dengan ‘Positif Besar’.
Gambar. 2.5. Hubungan antara variabel, label dan fungsi keanggotaan dalam himpunan fuzzy [31]
dengan: NB = Negatif Besar ZE = Zero (Nol) PB = Positif Besar NK = Negatif Kecil PK = Positif Kecil
Variabel antara -10 sampai dengan 10 adalah besarnya perubahan yang terjadi dalam suatu pengukuran data.
2.3.3 Basis Pengetahuan
Basis pengetahuan merupakan bagian dari konfigurasi FLC yang memuat pengetahuan dari persoalan yang akan diselesaikan dengan FLC. Pengetahuan yang dimuat terdiri dari basis data dan basis kaidah atur fuzzy. Informasi yang ada ini akan digunakan sebagai dasar dalam komponen konfigurasi yang lain.
Langkah awal yang dilakukan adalah mendefinisikan informasi apa saja yang ada dalam sistem yang ditinjau. Setelah diketahui data masukan dan keluaran sistem, maka dirumuskan perubahan mendasar yang dilakukan terhadap data tersebut. Kemudian didefinisikan karakteristik operasi khusus pada model
fuzzy yang diusulkan sambil ditentukan kapan dan dengan sub sistem fuzzy ini
akan dipakai dalam keseluruhan sistem. Setelah diperoleh gambaran umum dari sistem yang diinginkan maka disusun basis data dan basis kaidah atur fuzzy [31]. 2.3.3.1. Basis Data
Basis data berfungsi untuk mendefinisikan himpunan fuzzy dari masukan dan keluaran agar dapat dipakai oleh kaidah atur fuzzy. Perancangan basis data mempertimbangan aspek berikut ini:
a. Pembagian ruang masukan dan keluaran fuzzy
Pada pembagian ini dilakukan pembagian semesta pembicaraan masukan dan keluaran menjadi variabel linguistik himpunan fuzzy. Pembagian ini akan menentukan jumlah himpunan fuzzy dan kaidah atur yang dapat disusun. Variabel linguistik himpunan fuzzy umumnya memiliki arti, seperti NB (negative big), NM (negative medium), NS (negative small), ZE (zero), PS (positive small), PM (positive medium), PB (positive big) dan seterusnya. b. Kelengkapan
Secara intuitif, algoritma FLC harus selalu mampu membangkitkan aksi kontroler yang sesuai untuk setiap keadaan dari proses. Sifat ini dikenal sebagai kelengkapan (completeness). Kelengkapan FLC berkaitan dengan basis data, basis kaidah, atau keduanya.
2.3.3.2. Basis Kaidah Atur Fuzzy
Sistem fuzzy diungkapkan dengan pernyataan linguistik yang berdasar pada pengetahuan pakar (expert knowledge). Pengetahuan pakar dinyatakan dalam
bentuk aturan ‘IF-THEN’. yang secara mudah dapat diterapkan oleh pernyataan fuzzy dalam logika fuzzy. Kumpulan pernyataan tersebut disebut kaidah atur fuzzy.
Pada prinsipnya, kaidah atur fuzzy diturunkan dari analisis perilaku sistem yang ditinjau. Kemudian didefinisikan keadaan sistem yang diinginkan dengan masukan dan keluaran yang ada. Kaidah atur merupakan pemetaan atau
transformasi dari masukan menjadi keluaran pada sistem yang diinginkan. Basis kaidah atur inilah yang akan diimplementasikan pada logika pengambil keputusan.
Beberapa aspek dalam pembentukan basis kaidah atur fuzzy antara lain: a. Pemilihan variabel keadaan dan variabel kontrol proses.
Kaidah atur fuzzy lebih mudah diformulasikan secara linguistik dari pada numerik. Pemilihan variabel keadaan dan variabel kontrol proses sangat penting bagi karakterisasi operasi sistem fuzzy. Secara khusus, pemilihan variabel linguistik dan fungsi keanggotaannya berpengaruh besar pada struktur linguistik FLC. Pada umumnya, variabel linguistik dari sebuah FLC mencakup kesalahan (error), derivatif error, integral error, dan semacamnya.
b. Sumber dan penurunan kaidah atur fuzzy.
Terdapat empat cara penurunan kaidah atur fuzzy yaitu: -. Penurunan berdasarkan pengalaman dan pengetahuan pakar. -. Emulasi aksi kontroler.
-. Pemodelan fuzzy dari proses.
d. Proses belajar (learning), misalnya dengan memanfaatkan jaringan syaraf tiruan (NN).
c. Justifikasi kaidah atur fuzzy.
Terdapat dua pendekatan utama dalam kaidah atur fuzzy. Pendekatan pertama adalah dengan metoda heuristik dari sekumpulan kaidah fuzzy dibangun dengan analisis perilaku proses yang dikontrol berdasarkan pengetahuan kualitatif. Pendekatan kedua dalam pembentukan basis kaidah atur analog dengan pengontrol konvensional yang dirancang melalui penempatan pole. Kaidah-kaidah atur fuzzy dari sebuah loop terbuka dan sistem loop tertutup yang diinginkan diberikan. Tujuannya adalah merancang elemen kontroler linguistik berdasarkan pada model fuzzy. Ide dasarnya adalah membalik model linguistik orde rendah dari sebuah sistem loop terbuka.
d. Tipe kaidah atur fuzzy
Terdapat dua tipe kaidah atur fuzzy yang digunakan secara meluas dalam FLC yaitu:
- Kaidah kontroler fuzzy evaluasi keadaan.
Kebanyakan FLC adalah kaidah kontroler evaluasi keadaan, dalam kasus dua masukan satu keluaran, memiliki bentuk: Jika a adalah Ai dan b adalah Bi maka c adalah Ci, dengan a dan b adalah variabel linguistik yang merepresentasikan variabel keadaan proses dan c adalah variabel linguistik yang merepresentasikan variabel kontroler; Ai, Bi dan Ci adalah nilai linguistik dari variabel linguistik.
- Kaidah FLC evaluasi obyek.
Metoda ini dikenal juga sebagai FLC prediktif, mengingat teknik ini memprediksikan aksi kontroler waktu ke depan dan mengevaluasi tujuan kontroler. Kaidah dengan metoda ini berbentuk “Jika indeks kinerja a adalah Ai dan indeks b adalah Bi dan jika aksi kontroler c dipilih sebagai Ci, maka kaidah ini dipilih dan nilai aksi kontroler Ci diambil sebagai keluaran dari FLC”.
e. Jumlah kaidah atur fuzzy
Tidak ada prinsip umum yang dapat digunakan untuk menentukan jumlah kaidah atur fuzzy. Sejumlah faktor terlibat didalam penentuan jumlah kaidah ini, seperti kinerja kontroler, efisiensi komputasi, perilaku operator, dan pemilihan variabel linguistik.
f. Konsistensi kaidah atur fuzzy
Bila penurunan kaidah atur fuzzy didasarkan pada pengalaman operator, kaidah-kaidah ini akan dipengaruhi atau bergantung kepada kriteria kinerja yang berbeda. Dalam praktek, diperlukan pengecekan konsistensi kaidah fuzzy untuk meminimumkan kemungkinan kontradiksi.
g. Kelengkapan
Sifat kelengkapan dilibatkan dalam kaidah atur fuzzy melalui pengalaman perancangan dan pengetahuan perekayasa. Kaidah tambahan dapat digunakan bilamana sebuah kondisi fuzzy tidak dilibatkan dalam basis kaidah atau bilamana tingkat kesesuaian parsial antara sejumlah masukan dengan kondisi
pertama memperlihatkan bahwa tidak ada aksi kontroler yang bekerja. Kondisi yang kedua memperlihatkan bahwa tidak ada kaidah domain yang diaktifkan.
2.3.4 Logika Pengambilan Keputusan
Penggunaan suatu FLC dapat dipandang sebagai suatu langkah pemodelan pengambilan keputusan manusia dalam penalaran pendekatan dalam fuzzy logic. Secara umum, suatu aturan FLC adalah suatu relasi fuzzy yang mengekspresikan dalam suatu implikasi fuzzy.
Jika basis data dan basis kaidah atur sistem yang ditinjau sudah diketahui, maka basis pengetahuan ini digunakan untuk menyusun logika pengambilan keputusan dengan cara menuliskan aturan yang menghubungkan antara masukan dengan keluaran model fuzzy. Aturan ini diekspresikan dalam kalimat: ‘jika <masukan> maka <keluaran>‘, masukan dan keluaran berupa konsep linguistik.
2.3.5 Strategi Defuzzifikasi
Pada dasarnya, defuzzifikasi adalah suatu pemetaan dari ruang aksi FLC yang ditentukan meliputi himpunan semesta keluaran (output universe of
discourse) ke ruang aksi kontroler crisp (non fuzzy). Strategi defuzzifikasi
ditujukan untuk menghasilkan suatu aksi kontroler non fuzzy yang paling tepat dalam merepresentasikan kemungkinan distribusi aksi FLC yang telah dihitung. Hal ini diperlukan sebab dalam banyak aplikasi nyata yang dibutuhkan adalah aksi kontroler non fuzzy. Ada beberapa strategi yang umum dipakai diantaranya kriteria max, mean of maximum (MOM) dan center of area (COA). Secara simbolis, defuzzifikasi dapat dinyatakan:
zo= defuzzifier(z) (2.25)
dengan z0adalah bilangan non fuzzy (crisp) yang merupakan bilangan nyata yang dihasilkan oleh proses defuzzifikasi, z adalah bilangan fuzzy, dan defuzzifier menyatakan operasi defuzzifikasi.
Metoda kriteria max menghasilkan titik dengan distribusi kemungkinan dari aksi kontroler mencapai nilai maksimum. Strategi MOM menghasilkan suatu
aksi kontroler yang merepresentasikan nilai mean dari seluruh aksi kontroler lokal yang fungsi keanggotaannya mencapai maksimum. Lebih spesifik, dalam kasus himpunan semesta diskrit, aksi kontroler dapat diekspresikan oleh persamaan :
= ∑ (2.26)
dengan wj adalah nilai support ketika fungsi keanggotaan mencapai nilai maksimumμz(wj), dan k adalah banyaknya nilai support yang demikian.
Strategi COA yang banyak digunakan menghasilkan pusat gravitasi dari distribusi kemungkinan suatu aksi kontroler. Dalam kasus himpunan semesta kontinyu, metoda ini memberikan harga zodalam bentuk:
=∫ ( )∙
∫ ( ) (2.27)
dan dalam kasus diskrit zodinyatakan dalam bentuk:
=∑∑ ( )∙( ) (2.28)
Dibanding dengan strategi MOM, keluaran dari strategi COA tidak memiliki transient switching, melainkan suatu transisi yang halus antara harga-harga keluaran untuk masukan yang variabel.
2.3.6 Sistem Umpan Balik Fuzzy Logic
Dikenal beberapa metoda penurunan suatu basis kaidah atur fuzzy, diantaranya adalah dengan metoda verbalisasi. Metoda ini didasarkan pada basis aturan kontroler dan pengalaman operator melalui proses verbalisasi. Pendekatan ini alamiah karena aturan FLC menirukan perilaku manusia melalui pernyataan kondisional linguistik.
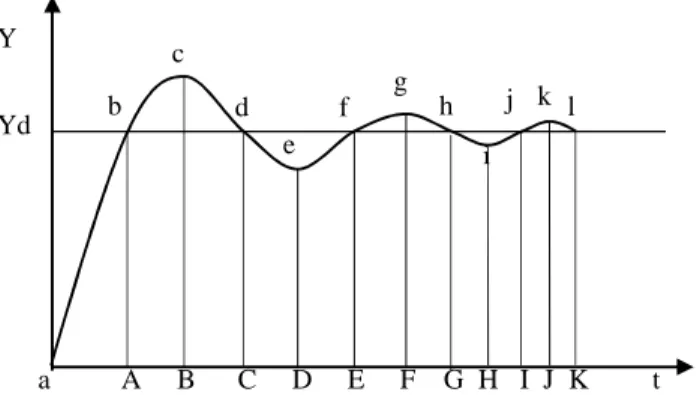
Gambar 2.6 memperlihatkan sistem kontrol loop tertutup dari FLC dengan ER (error) dan DE (delta error) merupakan masukan FLC dan OT (output) adalah besaran yang diberikan pada Plant. Dengan metoda verbalisasi aturan kontroler loop tertutup fuzzy dapat diturunkan dengan mengamati unjuk kerja sistem. Aturan ini seperti layaknya tabel pengambilan keputusan berisi kombinasi masukan yang terjadi serta keluaran yang harus dijalankan. Sebagai contoh diamati unjuk kerja sistem dengan respons step seperti pada Gambar 2.7.
Gambar 2.7. Sistem dengan tanggapan step [32]
Apabila referensi (sub set) fuzzy didefinisikan sebagai [NB, NM, NS, ZE, PS, PM, PB] untuk variabel [ER, DE, OT] maka diperoleh hukum kontroler IF ER AND DE IS OT seperti dalam Tabel 2.1. Dari sini, secara umum penyusunan kaidah atur FLC dalam proses kontrol dapat disimpulkan sebagai berikut:
1. Jika keluaran telah sesuai dan beda error adalah nol, maka keluaran dari FLC adalah konstan.
2. Jika keluaran belum sesuai dengan yang diinginkan, aksi kontroler tergantung pada tanda dan besarnya error dan beda error.
3. Jika kondisi menunjukan bahwa error dapat dikoreksi dengan cepat oleh aksi kontroler, maka aksi kontroler dijaga tetap.
Dengan kata lain keluaran dari FLC berubah menurut error dan beda error.
Y Yd b c d e f g h i j k l a A B C D E F G H I J K t
Tabel. 2.1. Kaidah Atur FLC [32]
Rule No ER DE OT Reference Function
1 PB ZE PB Point a Shorten rise time
2 PM ZE PM Point e Shorten rise time
3 PS ZE PS Point I Shorten rise time
4 ZE NB NB Point b Reduce overshoot
5 ZE NM NM Point f Reduce overshoot
6 ZE NS NS Point j Reduce overshoot
7 NB ZE NB Titik c Reduce overshoot
8 NM ZE NM Point g Reduce overshoot
9 NS ZE NS Point k Reduce overshoot
10 ZE PB PB Point d Reduce oscillation
11 ZE PM PM Point h Reduce oscillation
12 ZE PS PS Point l Reduce oscillation
13 ZE ZE ZE Set point Braking system
14 PB NS PM Range A Shorten rise time
15 PS NB NM Range A Reduce overshoot
16 NB PS NM Range C Reduce overshoot
17 NS PB PM Range C Reduce oscillation
18 PS NS ZE Range I Braking system
19 NS PS ZE Range K Braking system
Metode aturan fuzzy pertama kali dikenalkan oleh Ebrahim Mamdani tahun 1975 yang dikenal dengan metode Mamdani atau Max-Min dengan lima tahapan untuk memperoleh output yaitu [33]
a. Pembentukan himpunan Fuzzy (variabel input dan output) b. Operasi membership function
c. Aplikasi fungsi implikasi (implication), pada umumnya digunakan fungsi Min d. Komposisi aturan (agregation)
e. Penegasan (defuzzification)
Kelima proses diatas dapat dilihat pada contoh kasus pemberian “Bonus”
![Gambar 2.1. Model ride kendaraan [28]](https://thumb-ap.123doks.com/thumbv2/123dok/4119324.2813804/22.918.245.715.548.812/gambar-model-ride-kendaraan.webp)
![Gambar 2.3. Kontroler PID [18]](https://thumb-ap.123doks.com/thumbv2/123dok/4119324.2813804/27.918.210.750.698.848/gambar-kontroler-pid.webp)
![Gambar 2.6. Sistem kontrol loop tertutup dari FLC [31]](https://thumb-ap.123doks.com/thumbv2/123dok/4119324.2813804/36.918.255.705.925.1015/gambar-sistem-kontrol-loop-tertutup-dari-flc.webp)
![Gambar 2.8 Type-1 Fuzzy Inference System Mamdani [33]](https://thumb-ap.123doks.com/thumbv2/123dok/4119324.2813804/39.918.248.716.181.514/gambar-type-fuzzy-inference-system-mamdani.webp)
![Gambar 2.10. Inisialisasi partikel [35]](https://thumb-ap.123doks.com/thumbv2/123dok/4119324.2813804/42.918.340.623.346.572/gambar-inisialisasi-partikel.webp)
![Gambar 2.11. Pemutakhiran Kecepatan dan Posisi pada PSO [21]](https://thumb-ap.123doks.com/thumbv2/123dok/4119324.2813804/44.918.290.687.675.979/gambar-pemutakhiran-kecepatan-dan-posisi-pada-pso.webp)