Muhammad Fajri Ardha, 2013
SIMULASI LIFT BARANG BERBASIS MIKROKONTROLER
PROYEK AKHIR
DiajukansebagaisalahsatusyaratmendapatkangelarAhliMadya Program Studi D3TeknikElektrotahunakademik 2012/ 2013
DisusunOleh :
MUHAMMAD FAJRI ARDHA 1004587
DIPLOMA TIGA TEKNIK ELEKTRO
JURUSAN PENDIDIKAN TEKNIK ELEKTRO
FAKULTAS PENDIDIKAN TEKNOLOGI DAN KEJURUAN
UNIVERSITAS PENDIDIKAN INDONESIA
BANDUNG
Simulasi Lift
BarangBerbasisMikrokontroler
Oleh :
Muhammad FajriArdha
Sebuah tugasakhir yang diajukan untuk memenuhi salah satu syarat memperoleh gelar AhliMadya pada Fakultas Pendidikan TeknologidanKejuruan
© Muhammad FajriArdha Universitas Pendidikan Indonesia
Nopember 2013
Hak Cipta dilindungi undang-undang.
Muhammad Fajri Ardha, 2013
LEMBAR PENGESAHAN TUGAS AKHIR
“Simulasi Lift BarangBerbasisMikrokontroler”
Oleh :
Muhammad FajriArdha
NIM 1004587
Menyetujui,
DosenPembimbing
Drs. YadiMulyadi, MT
NIP. 19630727 199302 1 001
Mengetahui,
Ketua Prodi Diploma III TeknikElektro
KetuaJurusanPendidikanTeknikElektro
FPTK UPI
DandhiKuswardhana, MT Prof. Dr. H. BachtiarHasan, ST,
MSIE
SIMULASI LIFT BARANG BERBASIS
MIKROKONTROLER
Oleh:
Muhammad FajriArdha
ABSTRAK
Dalam sebuah bangunan bertingkat, dibutuhkan sebuah tangga untuk berpindah dari satu lantai ke lantai yang lain dalam keadaan naik satu lantai atau lebih ataupun turun satu lantai atau lebih. Namun pada kasus dimana bangunan memiliki tingkatan lantai yang sangat banyak, maka akan dibutuhkan sebuah sarana yang lebih baik dari sekedar tangga. Pada tugas akhir ini saya penulis mencoba membuat sebuah simulasi alat yang saya beri judul “Simulasi Lift Barang Berbasis Mikrokontroler”. Tugas akhir inia bertujuan membuat sebuah simulasi sistem yang mampu bekerja sebagai alat yang mampu memindahkan barang dari satu lantai ke lantai yang lebih tinggi. Simulasi ini nantinya akan dikontrol menggunakan mikrokontroler arduino yang mana nanti terhubung dengan sensor berat dan motor DC. Mikrokonroler arduino menghasilkan tegangan yang nantinya menghidupkan sensor berat sehingga dapat mengirimkan sinyal kembali pada arduino dan dapat memberi sinyal agar motor DC bergerak menarik carlift.
iv
1.5 Metode Perancangan Proyek Akhir ... 3
1.6 Sistematika penulisan ... 4
BAB II LANDASAN TEORI 2.1 Lift Secara Umum ... 6
2.3 Mikrokontroler Secara Umum ... 10
2.4 Mikrokontroler Arduino ... 16
2.5 Komponen Elektronika ... 17
2.6 Motor DC ... 18
BAB III PERANCANGAN ALAT 3.1 Perancangan ... 25
3.2 Deskripsi Model Perancangan Otomatisasi Lift Barang ... 28
3.3 Perancangan dan Pembuatan Model Lift Barang ... 40
3.4 Listing Program ... 44
3.5 Perancangan Pengawatan Komponene Elektronika... 45
BAB IV HASIL DAN PEMBAHASAN 4.1 Pengujian ... 46
4.2 Pengukuran ... 47
4.3 Hasil Pembahasan Pengujian ... 54
BAB V PENUTUP 5.1 Kesimpulan ... 57
vi Muhammad Fajri Ardha, 2013
SIMULASI LIFT BARANG BERBASIS MIKROKONTROLER DAFTAR PUSTAKA ...
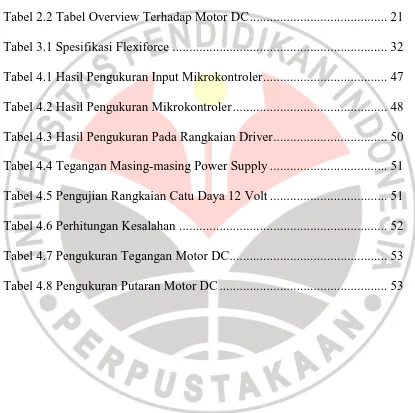
DAFTAR TABEL
Tabel 2.1 Tabel Spesifikasi Mikrokontroler Arduino Mega ... 17
Tabel 2.2 Tabel Overview Terhadap Motor DC ... 21
Tabel 3.1 Spesifikasi Flexiforce ... 32
Tabel 4.1 Hasil Pengukuran Input Mikrokontroler ... 47
Tabel 4.2 Hasil Pengukuran Mikrokontroler ... 48
Tabel 4.3 Hasil Pengukuran Pada Rangkaian Driver ... 50
Tabel 4.4 Tegangan Masing-masing Power Supply ... 51
Tabel 4.5 Pengujian Rangkaian Catu Daya 12 Volt ... 51
Tabel 4.6 Perhitungan Kesalahan ... 52
Tabel 4.7 Pengukuran Tegangan Motor DC... 53
viii Muhammad Fajri Ardha, 2013
SIMULASI LIFT BARANG BERBASIS MIKROKONTROLER DAFTAR GAMBAR
Gambar 2.1 Lift Barang yang Menggunakan Media Tarik Tali Baja ... 7
Gambar 2.2 Lift Barang yang Menggunakan Media Tarik Rantai ... 8
Gambar 2.3 Sistem Kerja Mikrokontroler ... 11
Gambar 2.4 Blok Mikrokontroler ... 13
Gambar 2.5 Board Arduino Mega... 16
Gambar 2.6 Beberapa Contoh Komponen Elektronika ... 18
Gambar 2.7 Motor DC ... 20
Gambar 2.8 Gambaran Skematik Motor DC ... 20
Gambar 2.9 Skema Kerja Motor DC... 21
Gambar 2.10 Gambar Penampang Motor 2 Kutub ... 23
Gambar 3.1 Alur Perencanaan ... 27
Gambar 3.2 Flow Chart Sistem Otomatisasi Lift Barang ... 37
Gambar 3.3 Diagram Blok Sistem Lift Barang ... 38
Gambar 3.4 Ukuran Miniatur ... 40
Gambar 3.5 Ukuran Atap dan Alas ... 41
Gambar 3.6 Ukuran Carlift ... 41
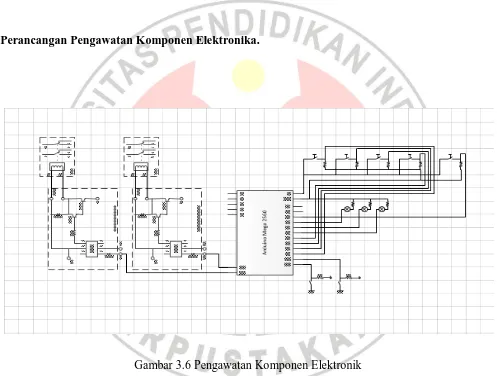
Gambar 3.7 Pengawatan Komponen Elektronik ... 45
BAB I
PENDAHULUAN
1. 1. Latar Belakang.
Dalam sebuah bangunan bertingkat, dibutuhkan sebuah tangga untuk
berpindah dari satu lantai menuju ke lantaiyang lain dalam keadaan naik satu
lantai atau lebih ataupun turun satu lantai atau lebih. Namun pada kasus
dimanabangunan memiliki tingkatan lantai yang sangat banyak, makaakan
dibutuhkan sebuah sarana yang lebih baikdari sekedar tangga, misalnya lift. Lift
yang berfungsi sebagai alat pengangkut atau pemindah sebuah benda atau
barangatau orang dari suatu level ketinggian ke level ketinggian yang lainnya,
merupakan alat yang sangat kompleks. Inti darilift ini adalah pengembangan dari
pesawat sederhana atau katrol, dengan menggunakan energi listrik sebagai sumber
tenaga untuk menggerakkannya.
Dapat dibayangkan berapa waktu dan tenaga yang dibutuhkan untuk naik
dan turun pada sebuah bangunan yangmemiliki lantai lebih dari satu atau dua
tingkat jika hanya menggunakan tangga biasa. Berbeda halnya jika penggunadapat
menggunakan fasilitas lift yang tentunya akan dapat menghemat waktu dan tenaga
untuk naik atau turun beberapalantai.Pada dasarnya lift merupakan bagian dari
robot. Definisi dari robot adalah suatu peralatan manipulator gerak yangmemiliki
kemampuan untuk dapat diprogram ulang dan multiguna serta dapat digunakan
antara lain untuk memindahkanmateri dan peralatan, dengan gerakan yang
2
Muhammad Fajri Ardha, 2013
gerakan lift memiliki satu gerakan yang sudah pasti yaitu gerakan ke atas atau ke
bawah dan akanlebih dikenal dengan gerakan satu derajat kebebasan. Akan tetapi
gerakan dari lift tergantung pada program yang dibuatoleh perancang. Program
tersebut ada bermacam-macam jenis, salah satunya adalah lift yang berhenti atau
diam bilatidak ada beban dan ada pula lift yang selalu bergerak walau tanpa beban
dan akan berhenti bila ada permintaan.
Pada industri terkadang dibutuhkan lift yang cuma digunakan untuk
memindahkan barang saja, yang dapat bergerak tapi tetap dapat dikontrol pada
satu titik. Maka alasan mengapa proyek ini dibuat adalah guna mempelajari sistem
dan prinsip kerja serta pengontrolan pada lift barang tersebut.
1. 2. RumusanMasalah.
yekakhirinidilakukan agar dalam proses
pembuatanproyekakhirinipenulisdapatmemilihinti-intipermasalahan yang
3
dibahaspadapembuatansimulasi lift
barangberbasismikrokontrolerinisebagaiberikut :
a. Alat yang dibuatadalahsimulasi lift barangdenganjumlahlantaisebanyak
3 lantai.
b. Perangkatkeras yang dibuatlebihdititikberatkanpada system
danrangkaiankontrol lift
barangsecarakeseluruhandibuathanyauntukmenunjang system sehingga
lift dapatberfungsidenganbaik.
1. 4. TujuanPenulisan.
Adapun tujuan pengangkatan judul ini adalahuntukmengontrolpergerakan
motor yang akanmenggerakkan lift barangberbasismikrokontroler.
1. 5. MetodePerancanganProyekAkhir.
Metodeperancangan yang
digunakandalampenulisanhasilProyekAkhiriniantara lain menggunakan :
a. Studiliterature, yaitumengumpulkan data denganmenggali,
mengkajidanmenelaahteori-teori yang
berhubungansertamendukunguntukpemecahanmasalah yang diteliti.
b. Observasi, yaitu proses pengumpulanbahan, data
daninformasidengancaraturundanmengamatilangsung di lapangan,
tentanghal-hal yang sekiranyatidakditemukan di
4
Muhammad Fajri Ardha, 2013
c. Analisisdanperhitungan,
yaitumelakukanperhitunganterhadapkontruksidankomponen-komponen yang akandigunakandalampembuatanalatproyekakhirini.
d. Ujilaboratorium, yaitumelakukanpercobaangunamendapatkan
data-data hasilpercobaan program dankontruksialat yang telahdibuat.
1. 6. SistematikaPenulisan.
Untukmempermudahpemahamandaripenelitianini,
makapenulismembagipenulisankedalam lima sub pokokbahasan yang meliputi :
BAB 1 PENDAHULUAN
Padababinimembahashal-hal meliputi latar belakangmasalah, rumusanmasalah,
batasanmasalah, tujuanpembuatan, metodologipenulisandansistematikapenulisan.
BAB II LANDASAN TEORI
Padababinidikemukakantentangtinjauanumum yang
berkaitandenganteori-teoripendukung yang mendasaridalampembuatansimulasi lift
barangberbasismikrokontroler.
BAB III PERANCANGAN DAN PEMBUATAN ALAT
Padababinidikemukakantentanglangkah-langkah yang
dilakukandalammelakukanpembuatanalat, perancangan program pada system
pengendalian motor penggerak lift barang.
BAB IV PENGUJIAN HASIL DAN ANALISIS
Padababinidikemukakantentanghasildananalisisdarialatdan program yang
5
BAB V KESIMPULAN DAN SARAN
Padababinidikemukakanhal-hal yang telahdibahaspadababsebelumnya,
memberikansolusidangambaranumumdalampembuatansimulasi lift barang.
Membahastentangkesimpulan yang
dapatdiambilsetelahselesaimembuatproyekakhiriniserta saran yang dapatdiberikan
25
acuan sangat diperlukan dalam proses pembuatannya, agar pembuatan lebih
sistematis dan terarah sehingga kesalahan yang mungkin timbul dapat ditekan dan
dihindari.
3. 1. 1. Tujuan Perancangan.
Tujuan dari perancangan alat ini adalah untuk mewujudkan gagasan dan
didasari oleh teori serta fungsi dari arduino dan rangkaian drivercentral lock,
untuk kemudian dipadukan dan dengan sedikit modifikasi sehingga menghasilkan
alat yang sesuai dengan spesifikasi yang diharapkan, dan adapun tujuan dari
perencanaan pembuatan alat adalah:
a. Menentukan deskripsi kerja dari alat yang direncanakan
b. Menentukan komponen-komponen yang diperlukan
c. Sebagai pedoman dalam pembuatan alat
d. Mengatur tata letak komponen yang digunakan
e. Meminimalisir kesalahan dalam proses pembuatan
26
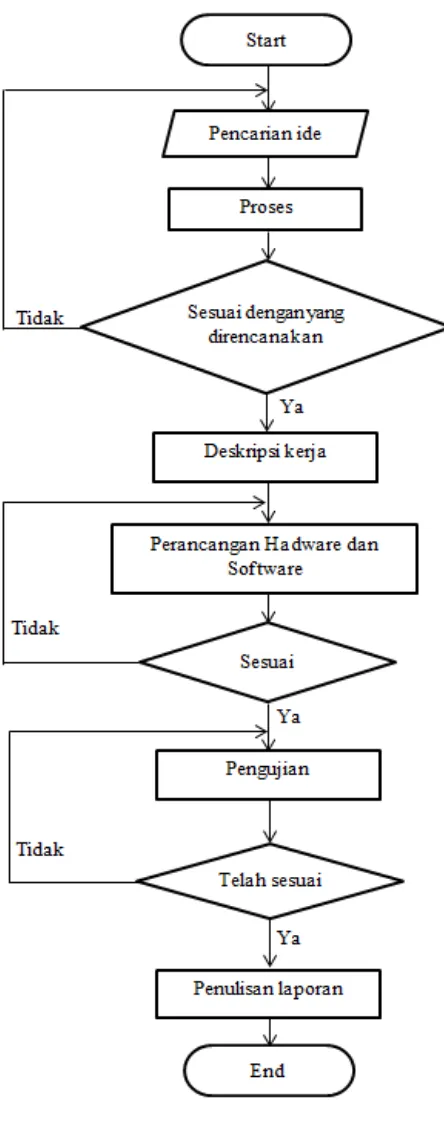
3. 1 . 2. Diagram Alur Perancangan.
Dalam memudahkan dalam pelaksanaan perancangan Simulasi Lift
Barang Berbasis Mikrokontroler, maka langkah awal yang ditempuh adalah
membangun gagasan, kemudian dilanjutkan dengan menentukan spesifikasi dan
prinsip kerja alat yang diinginkan, dilanjutkan dengan pencarian data dan
informasi perangkat keras (hadware) yang dibutuhkan serta fungsi-fungsi kerja
yang harus dipenuhi. Langkah berikutnya adalah pembutan software yang
digunakan untuk mengoperasikan sistem pengendalian, sehingga perangkat keras
berfungsi sesuai dengan keinginan. Kemudian dilanjutkan dengan pengukuran dan
pengujian alat, pencatatan hasil pengujian dan penyusunan laporan.
Langkah-langkah perancangan Simulasi Lift Barang Berbasis
Mikrokontroler, jika disederhanakan dalam bentuk alur perencanaan dapat dilihat
27
Muhammad Fajri Ardha, 2013
28
3. 2. Deskripsi Model Perancangan Otomatisasi Lift Barang.
3. 2. 1. Spesifikasi.
a. Rangka.
Secara umum rangka miniatur lift ini menggunakan beberapa komponen yaitu
besi berlobang, papan triplek, besi siku, baut- baut dan ring sebagai penguat agar
rangka terpasang kokoh. Besi berlobang yang digunakan adalah besi yang
memiliki lebar 4cm, dikarenakan gampang ditemui, ringan, dan lebih kuat
dibanding besi berlobang jenis lain. Papan triplek yang digunakan cukup
menggunakan papan triplek biasa yang tidak terlalu tipis atau juga tidak terlalu
tebal. Hal itu disebabkan karena papan triplek cuma dibutuhkan sebagai alas, atap
dan juga untuk carlift(Ruang penumpang)..
b. Rantai.
Rantai digunakan sebagai media tarik yang mana nantinya menghubungkan
motor dengan carlift, sehingga box dapat digerakkan naik turun. Rantai yang
digunakan memiliki panjang 3 m, karena terhubung langsung antara bagian
atascarlift denganbagian atascarlift. Rantai memiliki diameter 0,5 cm, tebal 1 cm,
dengan tujuan nanti mampu menahan berat carlift yang tentunya memiliki berat
yang berubah- ubah.
c. Gear.
Sebagai rel tempat rantai bergerak maka digunakan gear motor . Gear motor
29
Muhammad Fajri Ardha, 2013
berkaki serta memiliki daya cengkram yang lebih kuat sehingga memungkinkan
carlift bergerak lancar. Gear motor yang digunakan adalah gear yang berdiameter
6 cm dan memiliki lubang sehingga memungkinkan untuk dipasang baut agar
dapat dipasangkan pada rangka miniatur.
c. Motor DC.
Motor DC digunakan sebagai motor penggerak naik turunnya carlift. Motor
DC yang digunakan adalah motor DC seri.Motor DC akan bekerja bila ada
tegangan masuk sebesar 24 volt, 1,6A. Motor DC dipilih karena beberapa
kelebihannya :
Torka dan kecepatannya mudah dikendalikan. Torka awalnya besar.
Performansinya mendekati linier.
Sistem kontrolnya relatif lebih murah dan sederhana.
Cocok untuk aplikasi motor servo karena respon dinamiknya yang baik.
Untuk aplikasi berdaya rendah, motor DC lebih murah dari motor AC
Motor DC diposisikan dibagian bawah miniatur agar lebih efisien dalam segi
letak terhadap panel, dan juga lebih efektif ketika bergerak menarik beban naik
turun.
d. Power Suply / Catu daya.
Papan atau board Arduino Mega dapat diaktifkan melalui koneksi USB atau
dengan catu daya eksternal dengan sumber listrik dipilih secara otomatis. Catu
30
dengan menggunakan batere. AC-DC Adaptor dapat dihubungkan dengan cara
menghubungkannya dengan plug pusat-positif 2.1mm ke dalam board colokan
listrik. Sedangkan lead dari batere dapat dihubungkan dengan pin-header Vin dan
Gnd dari konektor power.
Board Arduino Mega dapat dioperasikan pada tegangan 6 -20 Volt dan
rentang dianjurkan adalah antara 7 – 12 Volt. Apabila board diberi tegangan lebih
dari 12 Volt, maka regulator tegangan akan panas dan merusak board, sedangkan
apabila diberi tegangan kurang dari 7V maka pin 5V akan menyuplai kurang dari
5 Volt dan board mungkin akan tidak stabil. Berikut adalah beberapa pin catu
daya pada board arduino:
Pin Vin. Pin tersebut digunakan untuk memberikan tegangan pada board
jika menggunakan sumber daya eksternal (non-USB atau sumber daya
lain).
Pin 5V. Catu daya untuk daya mikrokontroler atau komponen lainnya di
board. Hal ini dapat terjadi baik dari Vin dari regulator onboard ataupun
diberikanoleh USB.
Pin 3,3V. Pasokan yang dihasilkan oleh regulator onboard. Menarik arus
maksimal adalah 50mA.
Pin GND
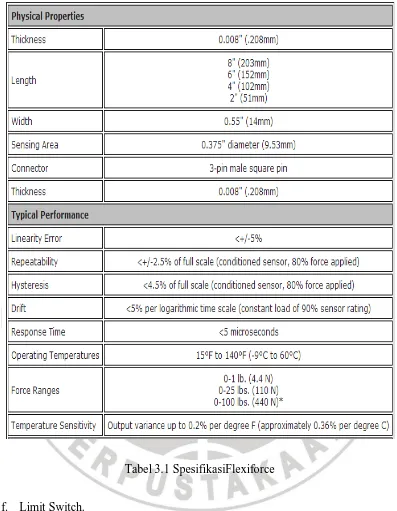
e. Flexiforce Sensor 100lb.
Flexiforce Sensor 100lb adalah sensor gaya ultra-tipis, fleksibel printed
circuit. Ini merupakan sensor yang kuat karena terbuat dari dua lapis substrat
31
Muhammad Fajri Ardha, 2013
diterapkan, diikuti oleh lapisan tinta tekanan-sensitif. Perekat ini kemudian
digunakan untuk laminasi dua lapisan substrat bersama untuk membentuk
kekuatan sensor. Daerah penginderaan aktif didefinisikan oleh lingkaran perak di
atas tinta tekanan-sensitif. Perak memanjang dari daerah penginderaan ke
konektor di ujung lain dari sensor, membentuk lead konduktif. A201 sensor yang
diakhiri dengan pin persegi pria, yang memungkinkan mereka untuk dapat dengan
mudah dimasukkan ke dalam sirkuit. Kedua luar pin konektor aktif dan pusat pin
aktif.
FlexiForce terkenal untuk fleksibilitas, kemudahan integrasi, dan efektivitas
biaya. Sensor FlexiForce yang cukup lentur untuk memungkinkan pengukuran
non-intrusif. Mereka dapat melekat pada banyak permukaan, dan dapat
dikombinasikan dengan plastik atau logam film untuk meningkatkan kekakuan
32
Tabel 3.1 SpesifikasiFlexiforce
f. Limit Switch.
Dalam teknik elektro limit switch adalah saklar yang dioperasikan oleh
gerakan bagian mesin atau kehadiran obyek. Mereka digunakan untuk
mengendalikan mesin, sebagai Interlocks keselamatan, atau untuk menghitung
33
Muhammad Fajri Ardha, 2013
Sebuah saklar batas adalah perangkat elektromekanis yang terdiri dari
aktuator mekanis terkait dengan satu set kontak. Ketika sebuah benda datang ke
dalam kontak dengan actuator, perangkat beroperasi kontak untuk membuat atau
menghancurkan sambungan listrik.
Limit switch yang digunakan dalam berbagai aplikasi dan lingkungan karena
kehandalannya, kemudahan instalasi, dan keandalan operasi. Mereka dapat
menentukan ada atau tidaknya, passing, positioning, dan akhir perjalanan dari
suatu obyek. Mereka pertama kali digunakan untuk menentukan batas perjalanan
obyek; maka nama "Limit Switch." Limit switch standar adalah komponen kontrol
industri diproduksi dengan berbagai jenis operator, termasuk tuas, rol plunger, dan
jenis kumis. Limit switch dapat langsung mekanis dioperasikan oleh gerakan tuas
operasi. Sebuah saklar buluh dapat digunakan untuk menunjukkan kedekatan
magnet yang dipasang pada beberapa bagian bergerak. Switch kedekatan
beroperasi dengan gangguan medan elektromagnetik, dengan kapasitansi, atau
dengan merasakan medan magnet.Jarang, perangkat operasi akhir seperti lampu
atau solenoid valve akan dikontrol langsung oleh kontak dari saklar batas industri,
tetapi lebih biasanya saklar batas akan ditransfer melalui kontrol relay, kontaktor
sirkuit kontrol motor, atau sebagai masukan untuk programmable logic
controller.Miniatur saklar snap-tindakan dapat digunakan misalnya sebagai
komponen perangkat seperti mesin fotokopi atau printer komputer, untuk
memastikan komponen internal dalam posisi yang benar untuk operasi dan untuk
mencegah operasi pada saat pintu akses dibuka. Satu set limit switch disesuaikan
34
mencapai posisi penuh dinaikkan atau diturunkan sepenuhnya. Sebuah mesin
kontrol numerik seperti mesin bubut akan memiliki limit switch untuk
mengidentifikasi batas maksimum untuk bagian mesin atau untuk menyediakan
titik referensi dikenal gerakan tambahan.
g. Relay.
Relay adalah perlengkapan elektrik yang dioperasikan saklar .Banyak relay
menggunakan elektromagnet untuk mengoperasikan mekanisme switching
mekanis, tetapi prinsip-prinsip operasi lain juga digunakan.Relay digunakan di
mana perlu untuk mengendalikan rangkaian dengan sinyal daya rendah (dengan
isolasi listrik lengkap antara kontrol dan sirkuit dikontrol), atau di mana beberapa
sirkuit harus dikontrol oleh satu sinyal.Relay pertama digunakan dalam jarak jauh
sirkuit telegraf, mengulangi sinyal yang datang dari satu sirkuit dan re-transmisi
ke yang lain.Relay digunakan secara luas dalam pertukaran telepon dan komputer
awal untuk melakukan operasi logis.
Relay bekerja sebagai saklar dengan tegangan maksimal 12 V. Dalam
rancangan ini sinyal yang diterima berasal dari mikrokontroler arduino sebagai
switch motor.
h. Lampu Indikator.
Lampu indikator berfungsi untuk monitoring saat lift bekerja. Digunakan 3
buah lampu indikator 12 V, yaitu warna hijau, kuning, merah. Lampu hijau nyala
ketika lift bergerak naik. Lampu kuning nyala ketika lift bergerak turun. Lampu
35
Muhammad Fajri Ardha, 2013
3. 2. 2. Prinsip Kerja Otomatisasi Lift Barang
Pada perancangan otomatisasi lift barang miniatur gedung diposisikan
memiliki 3 lantai. Setiap lantainya dilengkapi tombol- tombol yang berguna
sebagai switch yang nantinya akan mengirimkan sinyal kepada panel utama yang
terletak di lantai utama.
Panel utama terletakdilantai 1 yang mana pada panel ini terdapat 2 buah
tombol hijau, 1 tombol kuning, dan 1 tombol merah. Tombol ini memiliki
spesifikasi :
Tombol Hijau 1 : Untuk naikdari lantai 1 menuju lantai 3.
Tombol Hijau 2 : Untuk naik dari lantai 1menuju lantai 2.
Tombol Kuning : Sebagai tombol resetatauturun.
Tombol Merah : Sebagai tombol stop.
Padalantai 2 terdapat dua tombol berwarna hijau. Tombol A berfungsi
sebagai tombol naik dari lantai 1 menuju lantai 2, dan tombol B berfungsi sebagai
tombol turun dari lantai 2 menuju lantai 1.
Pada lantai 3 juga terdapat dua tombol berwarna hijau. Tombol A
berfungsi sebagai tombol naik dari lantai 1 menuju lantai 3, dan tombol B
berfungsi sebagai tombol turun dari lantai 3 menuju lantai 1.
Pada Carliftdilengkapi sebuah sensor berat Flexiforce Sensor 100lbyang
mana nanti akan di settingmemiliki beban maksimal 3kg. Jadipadadasarnyabarang
36
masukkedalamcarliftakansecaraotomatisditimbangberatnya,Apabilaberatdaribeba
nkurangdari 3kg maka motor dapatdigerakkanuntukmenarikcarlift(lift jalan).
Namun apabila beban yang berada di dalam carlift melebihi berat yang telah
ditentukan maka motor tidak dapat bergerak menarik carlift (lift mati)
Beda dengan lift barang atau lift barang penumpang, pada lift barang tidak
dilengkapi motor pengerem, sehingga untuk mengontrol berhentinya carlift hanya
menggunakan motor saja. Apabila motor jalancarliftjugajalan, danapabila motor
mati lift jugaakanmati.
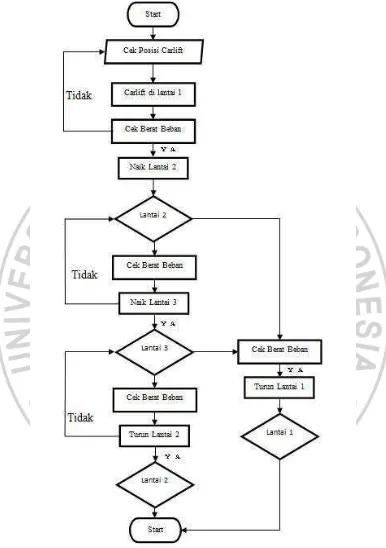
37
Muhammad Fajri Ardha, 2013
38
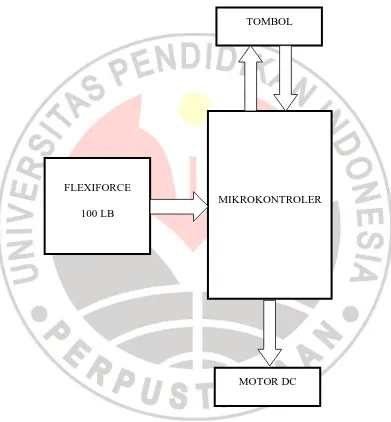
Secara umum diagram blok simulasi lift barang dapat dilihat seperti dibawah ini :
Gambar 3.3Diagram Blok SistemLift Barang MIKROKONTROLER
TOMBOL
MOTOR DC FLEXIFORCE
39
Muhammad Fajri Ardha, 2013
Pada dasarnya cara kerja dari lift barang hampir sama dengan lift biasa, cuma
berbeda pada tersedianya tombol pengendali pada tiap lantai. Pada lift biasa
tersedia tombol untuk naik dan turun, pada lift barang selain pada lantai dasar
cuma memiliki tombol keatas.
Pada panel utama di lantai utama terdapat 4 tombol dan pada lantai 2 terdapat
1 tombol. Tombol- tombol itu berfungsi 1 tombol untuk menggerakkan carlift
naik (Tombol 1), 1 tombol menggerak carlift turun (Tombol 2), 1 tombol reset
(Tombol 3), 1 tombol stop (Tombol 5).
Ketika tombol 1 ditekan maka arduino akan mengirim sinyal dan motor
berputar untuk menggerakkan carlift agar naik menuju lantai 2. Pada bagian atas
lantai 2 telah dipasang limit switch. Limit Switch ini berfungsi sebagai batas atas,
yaitu ketika carlift bergerak dan menyentuh batas atas atau limit switch maka
carlift akan berhenti. Untuk menggerakkan kembali carlift ke lantai utama maka
di tekan tombol 2. Tombol 2 berfungsi untuk menggerakkan carlift turun menuju
lantai utama.
Ketika carlift berada pada lantai 2 maka untuk menggerakkannya turun
ditekan tombol 2. Pada lantai utama juga dipasang limit switch yang berfungsi
sebagai batas bawah. Jadi, ketika carlift bergerak ke bawah dan menyentuh batas
bawah maka carlift akan berhenti.
Untuk lantai 2 Cuma terdapat 1 tombol (Tombol 5) yang berfungsi hanya
untuk menggerakkan carlift naik ke lantai 2, sedangkan untuk menggerakkan
40
Pada panel utama terdapat 2 tombol lagi yaitu tombol 3(reset), tombol 4
(stop). Tombol reset berfungsi ketika carlift berada di tengah rel maka tombol
reset berfungsi menggerakkan carlift kembali ke lantai utama.
3. 3. Perancangan dan Pembuatan Model Lift Barang.
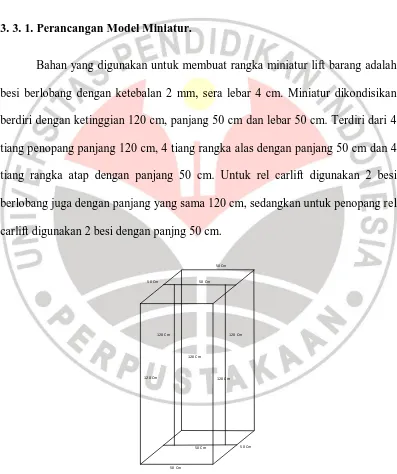
3. 3. 1. Perancangan Model Miniatur.
Bahan yang digunakan untuk membuat rangka miniatur lift barang adalah
besi berlobang dengan ketebalan 2 mm, sera lebar 4 cm. Miniatur dikondisikan
berdiri dengan ketinggian 120 cm, panjang 50 cm dan lebar 50 cm. Terdiri dari 4
tiang penopang panjang 120 cm, 4 tiang rangka alas dengan panjang 50 cm dan 4
tiang rangka atap dengan panjang 50 cm. Untuk rel carlift digunakan 2 besi
berlobang juga dengan panjang yang sama 120 cm, sedangkan untuk penopang rel
carlift digunakan 2 besi dengan panjng 50 cm.
41
Muhammad Fajri Ardha, 2013
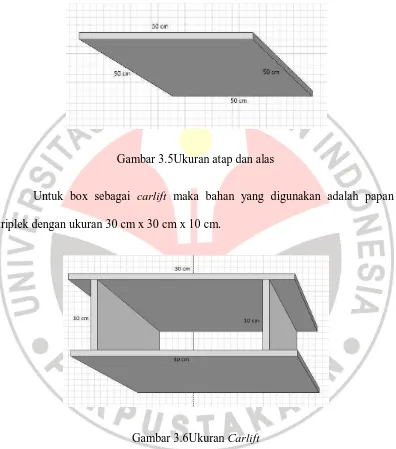
Untuk atap dan alas dari miniatur ini maka digunakan 2 buah papan triplek
dengan ukuran panjang dan lebar yaitu panjang 50 cm, lebar 50 cm.
Gambar 3.5Ukuran atap dan alas
Untuk box sebagai carlift maka bahan yang digunakan adalah papan
triplek dengan ukuran 30 cm x 30 cm x 10 cm.
Gambar 3.6Ukuran Carlift
Selain rangka secara kasar juga terdapat beberapa komponen yang
dibutuhkan. Seperti 2 buah tiang kayu yang digunakan sebagai media tempel limit
42
3. 3. 2. Pemilihan Komponen.
a. Rantai.
Karena beban yang akan diangkat memiliki berat yang nanti akan
berubah-ubah atau beban memiliki berat yang beragam maka kekuatan media tarik juga
perlu diperhitungkan. Media tarik yang dapat digunakan pun juga bergam, dapat
menggunakan rantai, kawat baja, atau juga tali karet. Masing-masing bahan
memiliki karakteristik berbeda-beda dan kekuatan yang berbeda pula. Untuk
keamanan maka dipilih rantai, karena memilikibeban putus ( � ) yang besar, dan
sifatnya yang tidak kaku sehingga mudah mengikuti model miniature.
Rantai yang dipilih memiliki diameter 1, 5 cm, diakarenakan rantai dengan
43
Muhammad Fajri Ardha, 2013
Dari rumus diatas dapat dihitung beban maksimal yang dapat diangkat :
= �
�
= 20 � 5
= 4 �
Makadapatdisimpulkanbebanmaksimal yang dapatdiangkatsebesar 4 Kg.
b. Motor DC.
Motor DC dyang digunakan adalah motor DC 24 Volt, 1,6 A, 1 HP. Setelah
melakukan pengukuran maka didapatkan dengan menggunakan tegangan sebesar
24 Volt motor dapat berputar sebanyak 97 rpm. Untuk membuat simulasi ini tidak
diperlukan motor yang memiliki kecepatan yang besar, tapi lebih dibutuhkan
44
Dari rumus diatas maka dapat dihitung torsi maksimum dari motor DC yang
digunakan :
= 1 � 5252 2000
=5252 97
= 54, 145
3. 4. Listing Program.
45
Muhammad Fajri Ardha, 2013
3. 5. Perancangan Pengawatan Komponen Elektronika.
57
mikrokontroler ini dapat diambil beberapa kesimpulan sebagai berikut :
1. Dengan memanfaatkan mikrokontroller arduino kita dapat merancang sebuah
sistem pengontrolan miniatur lift.
2. Kecepatan motor DC pada saat menarik beban selalu konstan.
3. Limit switch bekerja secara maksimal, itu dapat diketahui ketika carlift
menyentuh limit switch dan motor berhenti menarik carlift.
4. Untuk penggunakan pada beban yang besar maka kita juga harus
mempertimbangkan kemampuan bahan yang digunakan untuk komponen.
5. 2. Saran.
Berdasarkan hasil dapat disimpulkan saran, sebagai berikut:
1. Sebaiknya simulasi ini dilengkapi dengan sistem pengereman agar pada saat
carlift berhenti bisa berhenti secara pelan dan tidak merusak barang yang
dibawa atau berada didalam carlift.
2. Kecepatan motor juga seharusnya dikontrol agar tidak terlalu cepat atau juga
DAFTAR PUSTAKA
Agfianto, Putra Eko. 2004. “Belajar Mikrokontroller AT89C51/52/53 Teori dan Aplikasi ED III”/ Yogyakarta: Gaya Media.
Atmel. “Flash Microcontroller: Architecthural Overview”/ (www.atmel.com). Malvino, Albert Paul. 1994. “Prinsip- Prinsip dan Penerapan Digital ED”/
Erlangga.
Muhsin, Muhammad. 2004. “Elektronika Digital Teori dan Penyelesaian”/ Yogyakarta: Andi.
Pitowarno, Endro. 2006. “Mikroprosesor dan Interfacing”/ Yogyakarta: Andi. Rahman, Hendra. 2005. “RancangBangunKontruksiMiniatur Lift”/ Padang:
PoliteknikNegeri Padang.
Rudenko. N. 2012. “MesinPengangkat”/ Jakarta: Erlangga.
Rusmadi, Dedi. 1995. “Mengenal Komponen Elektronika”/ Bandung: Pionir Jaya. Setiawan, Rachmad. 2006. “Mikrokontroller MCS-51”/ Yogyakarta: Graha Ilmu. Sutrisno. 1986. “Elektronika, Teori dan Penyelesaiannya”/ Bandung: Institut