perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
ESTIMASI MATRIKS ASAL-TUJUAN PERJALANAN
DENGAN MODEL GRAVITY BATASAN
BANGKITAN PERGERAKAN
(
Studi Kasus Kota Surakarta
)
Estimation of Origin-Destination Matrices With Production Constraint Gravity Model
(A Case Study of Surakarta City)
SKRIPSI
Diajukan Sebagai Salah Satu Syarat Untuk Memperoleh Gelar Sarjana Teknik
Disusun Oleh:
M. RIZQY SEPTYANTO
I 0108015
JURUSAN TEKNIK SIPIL FAKULTAS TEKNIK
UNIVERSITAS SEBELAS MARET
SURAKARTA
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
iv
MOTTO
SEMANGAT!!!!
“Semangat, berusaha, berdoa dan
jangan mudah menyerah”
(Bapak, Ibu, dan kakak-kakak)
“Kerja keras dan Ketekunan adalah
kunci Kesuksesan yang
Menyeimbangkan Kepandaian”
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
v
PERSEMBAHAN
Kupersembahkan karyaku ini untuk:
Allah SWT dan Rasulullah Muhammad SAW. Atas segala
nikmat dan berkah yang diberikan oleh-Nya.
Ibu Masfufah dan Bapak Mas’ud yang selalu memberi
dorongan dan doa. Terimakasih atas kasih sayang serta
pengorbanannya sampai saat ini.
Kakak-kakakku tersayang, Binti, Anis, Arif, Ali, Alifi, Andi,
terimaksih atas dukungan baik berupa materi maupun
semangat, tanpa kalian aku tidak akan bisa sukses sampai
saat ini.
Ponakan-ponakanku yang lucu-lucu, Fandi, Anggi, Rafi,
Ruli, Arine, Rasya kalian adalah penyemangat yg selalu
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
viii
KATA PENGANTAR
Puji syukur kepada Allah SWT atas rahmat dan karunia-Nya, sehingga penulis dapat menyelesaikan penyusunan skripsi dengan judul Estimasi Matriks Asal-Tujuan Perjalanan Dengan Model Gravity Batasan Bangkitan Pergerakan (Studi Kasus Kota Surakarta). Sholawat serta salam senantiasa tercurahkan kepada Nabi Besar Muhammad saw., keluarganya, para sahabat, serta generasi pelanjut estafet perjuangan beliau.
Penyusunan skripsi yang masih jauh dari sempurna ini sangat memberi pengalaman berharga bagi penulis, di samping itu semoga dapat menambah wawasan dan pengetahuan bagi kalangan Teknik Sipil umumnya dan khususnya Jurusan Teknik Sipil Fakultas Teknik Universitas Sebelas Maret Surakarta.
Skripsi ini disusun sebagai salah satu syarat yang harus ditempuh guna meraih gelar Sarjana Teknik Sipil pada Fakultas Teknik Universitas Sebelas Maret Surakarta. Skripsi ini tidak dapat terselesaikan tanpa bantuan dari pihak-pihak yang ada di sekitar penulis, karena itu dalam kesempatan ini penulis harus menyampaikan terima kasih sebesar-besarnya kepada yang tertera di bawah ini : 1. Segenap Pimpinan Fakultas Teknik Universitas Sebelas Maret Surakarta. 2. Segenap Pimpinan Jurusan Teknik Sipil Fakultas Teknik Universitas Sebelas
Maret Surakarta.
3. DR. Eng. Ir. Syafi’i, MT, selaku Dosen Pembimbing I Skripsi penulis. Terimakasih atas keprcayaan, bimbingan dan motivasi yang telah Bapak berikan selama proses pengerjaan skripsi ini. Banyak sekali ilmu dan pengalaman bapak yang memotivasi kami untuk terus berusaha.
4. Setiono, ST, MSc selaku Dosen Pembimbing II Skripsi. Terimakasih atas waktu, bimbingan dan bantuan yang bapak berikan dalam pengerjaan skripsi ini. Banyak ilmu dan saran yang bapak berikan telah membantu kami menyelesaikan skripsi ini.
5. Ir. Koosdaryani S,MT., selaku Dosen Pembimbing Akademis. Terimakasih atas bimbingan dan motivasi yang telah ibu berikan selama proses belajar penulis di jurusan teknik sipil ini.
6. Tim Penguji ujian pendadaran skripsi, terimakasih atas kesediaannya untuk menguji dan membimbing penulis hingga penulis dapat lulus.
7. Semua Staf Pengajar pada Jurusan Teknik Sipil Fakultas Teknik Universitas Sebelas Maret.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
ix
9. Kakak-kakak, Binti, Anis, Arif, Ali, Alifi, Andi dan keponakan-keponakanku, Fandi, Anggi, Rafi, Ruli, Arine, Rasya. Terimakasih atas dukungan dan keceriaan yang diberikan kepada penulis.
10.Keluarga besar Om Anton. Om Anton, Tante Sul, Mbak Widya, Antok, Erlyn. Terimakasih atas bantuan dan dukungan selama ini. Kalian adalah keluargaku yang kedua.
11.Kos Laskar Violet. Fahmi, Krisa, Tomy, Nanza, Bernard, Takai, Yusuf, Joshua. Terimakasih atas kebersamaan kita selama ini.
12.Sahabat-sahabat. Adi Prastya N, Wahyu Utomo, Ghea Bima P, Yusuf Zulianto, Samirta Mayang, Dwi Faizah, Sad Mei Nuraini, Ajeng Kusuma Dewi, Yunita Purwandari. Kalian adalah keluargaku dikampus. Terimakasih atas semuanya.
13.Teman-teman sipil 2008. Terimakasih atas bantuan dan dukungan selama ini. 14.Seluruh civitas akademika Teknik Sipil UNS. Terimakasih atas bantuannya
selama ini.
15.Dan semua yang pernah hadir dalam kehidupanku yang tidak bisa disebutkan satu per satu. Terimakasih atas segalanya.
Akhirnya pengantar ini juga menjadi semacam ingatan bagi penulis selama menempuh tahap pembelajaran di Universitas Sebelas Maret Surakarta hingga skripsi ini harus disusun sebagai syarat mendapatkan gelar kesarjanaan. Terima kasih.
Surakarta, September 2012
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
x
DAFTAR ISI
Halaman
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... ii
HALAMAN PENGESAHAN ... iii
MOTTO ... iv
PERSEMBAHAN ... v
ABSTRAK ... vi
ABSTRACT ... vii
KATA PENGANTAR ... viii
DAFTAR ISI ... x
DAFTAR TABEL ... xiii
DAFTAR GAMBAR ... xv
DAFTAR NOTASI DAN SIMBOL ... xvi
DAFTAR LAMPIRAN ... xviii
BAB 1 PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 3
1.3 Batasan Masalah ... 4
1.4 Tujuan Penelitian ... 5
1.5 Manfaat Penelitian ... 5
BAB 2 LANDASAN TEORI 2.1 Tinjauan Pustaka ... 6
2.2 Dasar Teori ... 8
2.2.1 Konsep Perencanaan Transportasi ... 8
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xi
2.2.3 Daerah Kajian ... 10
2.2.4 Sistem Zona ... 11
2.2.5 Sistem Jaringan Transportasi ... 12
2.2.6 Fungsi Jalan ... 13
2.2.7 Satuan Mobil Penumpang ... 14
2.2.8 Kapasitas ... 15
2.2.9 Kecepatan ... 20
2.2.10 Hubungan Kurva Kecepatan-Arus dan Biaya-Arus ... 25
2.2.11 Model Gravity ... 27
2.2.11.1 Model Gravity Batasan Bangkitan Pergerakan ... 29
2.2.12 Kalibrasi ... 29
2.2.13 Pembebanan User Equilibrium ... 32
2.2.14 Matrix Estimation by Maximum Entropy ... 34
2.2.15 Indikator Uji Statistik ... 35
BAB 3 METODE PENELITIAN 3.1 Lokasi Penelitian ... 38
3.2 Tahapan Penelitian ... 44
3.3 Algoritma Kalibrasi Newton-Raphson Program Free Pascal Lazarus ... 47
3.4 Sumber Data ... 47
3.4.1 Data Primer ... 47
3.4.2 Data Sekunder ... 48
3.5 Prosedur Survei Primer ... 48
3.5.1 Survei Pendahuuan ... 48
3.5.2 Teknik Pengumpulan Data ... 48
3.5.3 Desain Survei ... 49
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xii
BAB 4 ANALISIS DAN PEMBAHASAN
4.1 Umum ... 51
4.2 Pengolahan dan Penyajian Data ... 51
4.2.1 Pengumpulan Data ... 51
4.2.2 Pembagian Zona ... 52
4.2.3 Satuan Mobil Penumpang ... 54
4.2.4 Kapasitas ... 55
4.2.5 Waktu Tempuh ... 56
4.3 Analisis dengan Program EMME/3 ... 58
4.3.1 Basis Data Jaringan Jalan ... 58
4.3.2 Data Lalu Lintas ... 60
4.3.3 Data Matriks Awal (Prior Matrix) ... 61
4.3.4 Matriks Baru Hasil EMME/3 ... 68
4.4 Kalibrasi Newton-Raphson ... 75
4.5 Estimasi Matriks dengan Model Gravity Batasan Bangkitan ... 76
4.6 Pembebanan Matriks ke Jaringan Jalan ... 83
4.7 Uji Validasi ... 86
4.8 Pembahasan ... 86
4.8.1 Fungsi Hambatan... 86
4.8.2 Estimasi Matriks Asal-Tujuan Perjalanan ... 86
4.8.3 Tingkat Validitas ... 90
BAB 5 KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 91
5.2 Saran ... 92
DAFTAR PUSTAKA ... xix
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xiii
DAFTAR TABEL
Halaman
Tabel 2.1 emp Untuk Jalan Perkotaan Tak Terbagi ... 15
Tabel 2.2 emp Untuk Jalan Perkotaan Terbagi dan Satu Arah ... 15
Tabel 2.3 Kapasitas Dasar (Co) Jalan Perkotaan... 16
Tabel 2.4 Faktor Penyesuaian Kapasitas (FCw) Untuk Pengaruh Lebar Jalur Lalu Lintas Jalan Perkotaan ... 17
Tabel 2.5 Faktor Penyesuaian Kapasitas Untuk Pemisahan Arah (FCsp) ... 17
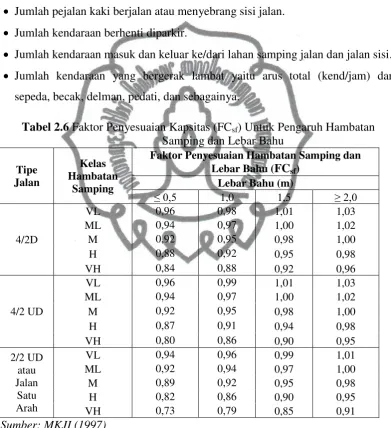
Tabel 2.6 Faktor Penyesuaian Kapsitas (FCsf) Untuk Pengaruh Hambatan
Samping dan Lebar Bahu ... 18
Tabel 2.7 Faktor Penyesuaian Kapsitas (FCsf) Untuk Pengaruh Hambatan
Samping dan Jarak Kereb-Penghalang (FCsf)... 19
Tabel 2.8 Penentuan Kelas Hambatan Samping... 20
Tabel 2.9 Faktor Penyesuaian Kapasitas Untuk Ukuran Kota (FCcs) pada Jalan
Perkotaan ... 20
Tabel 2.10 Kecepatan Arus Bebas Dasar (Fvo) Untuk Jalan Perkotaan ... 21
Tabel 2.11 Penyesuaian Kecepatan Arus Bebas Untuk Lebar Jalur Lalu Lintas (FVw) pada Jalan Perkotaan ... 22
Tabel 2.12 Faktor Penyesuaian (FFVsf) Untuk Pengaruh Hambatan Samping dan
Lebar Bahu pada Kecepatan Arus Bebas Untuk Jalan Perkotaan dengan Bahu ... 23
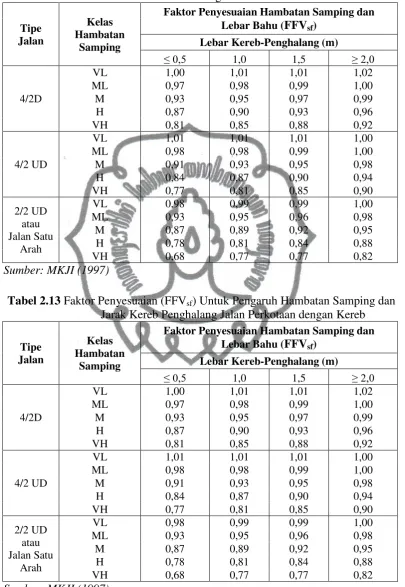
Tabel 2.13 Faktor Penyesuaian (FFVsf) Untuk Pengaruh Hambatan Samping dan
Jarak Kereb Penghalang Jalan Perkotaan dengan Kereb ... 23
Tabel 2.14 Faktor Penyesuaian Untuk Pengaruh Ukuran Kota pada Kecepatan Arus Bebas Kendaraan Jaringan Untuk Jalan Perkotaan... 24
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xiv
Tabel 3.2 Data Nomor Zona dan Nama Zona Internal ... 43
Tabel 3.3 Data Nomor Zona dan Nama Zona Eksternal ... 43
Tabel 4.1 Tabel Data Hasil Survei (Traffic Count) Tahun 2012 pada Jam Puncak ... 52
Tabel 4.2 Pembagian Zona Internal EMME/3 ... 53
Tabel 4.3 Pembagian Zona Eksternal EMME/3 ... 53
Tabel 4.4 Contoh Perhitungan Jumlah Kendaraan pada Jam Puncak ... 54
Tabel 4.5 Contoh Konversi Satuan kendaraan/jam ke smp/jam ... 55
Tabel 4.6 Format Masukan Basis Data Jaringan Jalan ... 59
Tabel 4.7 Koordinat Node Kota Surakarta ... 59
Tabel 4.8 Data Arus Lalu Lintas (Traffic Count) Tahun 2012 ... 61
Tabel 4.9 Prior Matrix Tahun 2009 ... 62
Tabel 4.10 Matriks Baru Hasil EMME3 ... 69
Tabel 4.11 Variabel-Variabel Kalibrasi dalam Program Free Pascal Lazarus ... 75
Tabel 4.12 Matriks Hasil Model Gravity Batasan Bangkitan Pergerakan ... 77
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xv
DAFTAR GAMBAR
Halaman
Gambar 2.1 Empat Tahap Pemodelan Transportasi ... 8
Gambar 2.2 Hubungan Tipikal Kecepatan-Arus dan Biaya-Arus ... 25
Gambar 3.1 Peta Administrasi Kota Surakarta ... 40
Gambar 3.2 Peta Pembagian Zona Kota Surakarta ... 41
Gambar 3.3 Peta Jaringan Jalan Kota Surakarta... 42
Gambar 3.4 Bagan Alir Metode Penelitian ... 44
Gambar 3.5 Diagram Alir Kalibrasi Newton-Raphson ... 45
Gambar 4.1 Network Editor... 60
Gambar 4.2 Editor Toolbar ... 60
Gambar 4.3 Garis Keinginan (Desire Line) Pembebanan Lalu Lintas Kota Surakarta ... 85
Gambar 4.4 Grafik Uji Validasi Volume Lalu Lintas ... 86
Gambar 4.5 Grafik Pergerakan Zona Internal ... 89
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xvi
DAFTAR NOTASI DAN SIMBOL
β = parameter fungsi hambatan
Ai, Bd = Faktor penyeimbang untuk setiap zona asal i dan tujuan d C = Kapasitas (smp / jam)
id
C = biaya perjalanan dari zona asal i ke zona tujuan d
Co = Kapasitas dasar untuk kondisi tertentu (ideal) (smp / jam) d
D = total pergerakan ke zona tujuan d
EMME/3 = Equilibrium Multimodal, Multimodal Equilibrium Version 3
Cidf = fungsi umum biaya perjalanan
FCcs = Faktor penyesuaian ukuran kota
FCsf = Faktor penyesuaian hambatan samping
FCsp = Faktor penyesuaian pemisah arah
FCw = Faktor penyesuaian lebar jalur lalu lintas
FFVcs = Faktor penyesuaian ukuran kota.
FFVsf = Faktor penyesuaian kondisi hambatan samping
FV = Kecepatan arus bebas kendaraan ringan sesungguhnya (km/jam) Fvo = Kecepatan arus bebas dasar kendaraan ringan (km/jam)
FVw = Penyesuaian lebar jalur lalu lintas efektif (km/jam)
FFV4sf = faktor penyesuaian kecepatan arus bebas untuk empat lajur (km/jam).
FFV6sf = faktor penyesuaian kecepatan arus bebas untuk enam lajur (km/jam).
MAT = Matriks Asal-Tujuan
i O
= total pergerakan dari zona asal i
l id
p
= proporsi pergerakan dari zona asal i ke zona tujuan d pada ruas l
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xvii
id
T = jumlah pergerakan dari zona asal i ke zona tujuan d
t0 = waktu tempuh pada saatV0 (detik) l
Vˆ
= arus lalu lintas hasil pengamatan pada ruas l
l
V = arus lalu lintas hasil pemodelan pada ruas l
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xviii
DAFTAR LAMPIRAN
Lampiran A : Traffic Count
Lampiran B : Konversi Satuan Kendaraan (smp/jam) Lampiran C : Kapasitas
Lampiran D : Waktu Tempuh
Lampiran E : Basis Data Jaringan Jalan Lampiran F : Koordinat Kota Surakarta Lampiran G : Listing Program EMME/3
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
vi
ABSTRAK
Muhammad Rizqy Septyanto. 2012. Estimasi Matriks Asal-Tujuan Perjalanan Dengan Model Gravity Batasan Bangkitan Pergerakan. Skripsi. Jurusan Teknik Sipil Fakultas Teknik Universitas Sebelas Maret Surakarta.
Dalam estimasi Matriks Asal-Tujuan (MAT) perjalanan dibutuhkan data titik survei arus lalu lintas yang banyak. Hal ini ditujukan untuk menyamakan keadaan di lapangan yang sekarang terjadi dan juga untuk memberikan hasil yang lebih akurat. Data MAT untuk Kota Surakarta yang ada sebelumnya akan diperbarui. Penelitian dilakukan untuk mengetahui tingkat validitas dari estimasi MAT perjalanan Kota Surakarta dengan menggunakan Model Gravity Batasan Bangkitan pergerakan. Selain itu, tujuan dari penelitian ini adalah menghitung
nilai parameter β yang merupakan parameter fungsi hambatan
(aksesibilitas/kemudahan) antar zona dengan Kalibrasi Newton-Raphson.
Daerah yang menjadi kajian adalah Kota Surakarta dengan menganalisis jalan arteri dan kolektor yang ada di dalamnya. Metode pembebanan yang digunakan adalah User Equilibrium. Sedangkan uji statistik yang digunakan untuk membandingkan arus hasil pemodelan dan traffic count adalah koefisien determinasi (R2).
Dari hasil perhitungan dengan EMME/3 dan Model Gravity Batasan Bangkitan diperoleh total pergerakan yang sama yaitu sebesar 32773,68 smp/jam. Sedangkan
nilai parameter β dari Kalibrasi Newton-Raphson sebesar -0,0271. Nilai R2 dari
perbandingan arus sebesar 0,89 karena nilai R2 mendekati 1 maka pemodelan mendekati keadaan nyata di lapangan.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
vii
ABSTRACT
Muhammad Rizqy Septyanto. 2012. Estimation of Origin-Destination Matrices With Production Constraint Gravity Model. Thesis. Civil Engineering Department Faculty of Engineering Sebelas Maret University of Surakarta.
Origin-Destination Matrix (OD Matrix) estimation needs much points of traffic count survei. It is intended to equalize the situation of the real situation that now happening, and also to provide more accurate results. OD Matrix data for pre-existing Surakarta City will be updated.
The study was conducted to determine the level of validity from Surakarta OD Matrix estimation uses Production Constraint Gravity Model. Morover the purpose of the study was to calculate the value of β parameter which is a parameter of barrier function (accessibilty) between zone uses Newton-Raphson Calibration.
The study area is Surakarta City with analyzing the arterial and collector roads that are on it. The assignment method that used is User Equilibrium. While the statistical test used to compare the result flow of modeling and traffic count is the coefficient of determination (R2).
From the calculation result uses EMME/3 and Production Constraint Gravity Model obtained by the total number of movements amounted to 32773,68
pcu/hour. While the value of β from Newton-Raphson Calibration amounted to
-0,0271. The value of R2 from flow comparison amounted to 0,89. Because of R2 value approach 1 so the result approach the real situation.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
1
BAB 1
PENDAHULUAN
1.1
Latar Belakang
Beberapa masalah utama dalam transportasi seperti kemacetan, polusi udara dan suara, kecelakaan, dan tundaan semakin berkembang seiring berjalannya waktu. Saat ini, permasalahan transportasi berkembang dengan tingkat kualitas dan kuantitas yang jauh lebih besar. Semakin banyaknya pihak yang terkait menyebabkan permasalahan transportasi menjadi semakin kompleks sehingga menjadi lebih sukar untuk diatasi.
Untuk memecahkan masalah transportasi yang ada, yang perlu dilakukan antara lain adalah bagaimana mempelajari dan memahami pola keterkaitan faktor-faktor yang menyebabkan munculnya masalah transportasi. Sarana yang paling efektif dan efisien yang dapat menggabungkan dan memberikan solusi dari semua faktor penyebab masalah transportasi adalah perencanaan dan pemodelan transportasi. Hasil keluaran dari perencanaan dan pemodelan transportasi dapat digunakan untuk memecahkan permasalahan transportasi, baik yang sedang terjadi maupun yang akan terjadi di masa yang akan datang.
Dalam perencanaan transportasi ada beberapa konsep, di antaranya yang umum digunakan adalah Model Perencanaan Transportasi Empat Tahap. Secara berurutan tahapan-tahapan konsep ini adalah model bangkitan dan tarikan pergerakan, model sebaran pergerakan, model pemilihan moda, dan model pemilihan rute.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
2
MAT merupakan matriks berdimensi dua yang berisi informasi tentang besarnya pergerakan antar zona di suatu daerah tertentu. Baris dalam MAT menyatakan zona asal sedangkan kolom dalam MAT menyatakan zona tujuan yang kemudian dapat dibaca sebagai besarnya arus dari zona asal menuju zona tujuan.
Jika suatu MAT dibebankan pada suatu jaringan jalan maka akan menghasilkan suatu arus lalu lintas. Dalam konteks perencanaan transportasi, estimasi arus lalu lintas pada tahun rencana sangat penting dalam menentukan kebijakan dan strategi penanganan jaringan jalan. Oleh karena itu estimasi MAT sangat penting dalam perencanaan dan pemodelan transportasi.
Sebagai salah satu kota besar, Kota Surakarta juga mengalami pertumbuhan yang sangat pesat layaknya kota-kota besar lainnya. Dengan pertumbuhan kota yang pesat maka akan berdampak pada peningkatan pergerakan arus lalu lintas. Untuk itu perlu dilakukan estimasi atau perkiraan MAT perjalanan Kota Surakarta sebagai salah satu bahan pertimbangan dalam pengambilan kebijaksanaan dan perencanaan kota dimasa yang akan datang.
Kota Surakarta yang menjadi daerah kajian dalam penelitian ini merupakan salah satu kota besar, yakni kota dengan kepadatan penduduk yang tinggi, mencapai 12.716 jiwa/km2 dengan fasilitas modern dan dapat memenuhi kebutuhan kota secara mandiri. Kota Surakarta dibagi ke dalam 65 zona, yang terbagi lagi menjadi 51 zona internal dan 14 zona eksternal. Pada umumnya, batas yang sering digunakan dalam penentuan batas zona adalah batas administrasi yang dapat berupa batas administrasi daerah, batas alami dan lain-lain. Zona asal tujuan dihubungkan oleh beberapa konektor yang merepresentasikan ruas jalan yang ada di Kota Surakarta.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
3
Sebelum mengestimasi MAT perjalanan baru, dibutuhkan sebuah parameter β
yang merupakan parameter fungsi hambatan (kemudahan atau aksesibilitas) antar zona. Nilai fungsi hambatan dalam transportasi biasanya diasumsikan dengan rute tercepat, termurah, atau terpendek dari zona asal menuju zona tujuan dengan berberapa kemungkinan rute yang dapat ditempuh. Dalam proses pengestimasian MAT dengan Model Gravity Batasan Bangkitan Pergerakan dibutuhkan sebuah
fungsi hambatan yang di dalamnya terdapat parameter β, oleh karena itu kalibrasi nilai parameter β sangat diperlukan dalam proses estimasi MAT.
Untuk mempermudah dalam proses kalibrasi nilai parameter β digunakan aplikasi
software Free Pascal Lazarus. Sedangkan untuk proses estimasi atau perkiraan MAT di Kota Surakarta, pada penelitian ini menggunakan bantuan aplikasi
software EMME/3 (Equilibrium Multimodal, Multimodal Equilibrium). Dari hasil menjalankan aplikasi software EMME/3 lalu memasukkan nilai β dari aplikasi
software Free Pascal Lazarus akan didapatkan sebuah MAT perjalanan baru hasil dari estimasi.
1.2
Rumusan Masalah
Berdasarkan latar belakang masalah yang telah diuraikan diatas dapat dirumuskan permasalahan sebagai berikut:
a. Berapa nilai parameter β sebagai fungsi hambatan dengan metode Newto -Raphson?
b. Berapa besar estimasi Matriks Asal-Tujuan perjalanan dengan batasan bangkitan pergerakan dari data lalu lintas?
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
4
1.3
Batasan Masalah
Untuk membatasi permasalahan agar penelitian tidak terlalu meluas dan lebih terarah maka perlu adanya pembatasan masalah sebagai berikut:
a. Daerah kajian adalah Kota Surakarta dan sekitarnya.
b. Pembagian zona berdasarkan batas-batas administratif berupa kelurahan. c. Metode kalibrasi yang digunakan adalah metode Newton-Raphson dengan
bantuan software Free Pascal Lazarus.
d. Metode perhitungan matriks yang digunakan untuk mengestimasi Matriks Asal-Tujuan baru adalah Metode Gravity Batasan Bangkitan Pergerakan. e. Data matriks awal (prior matriks) yang digunakan adalah hasil perhitungan
skripsi yang lalu.
f. Ruas jalan yang dianalisis adalah ruas jalan arteri dan kolektor sesuai pembagian jalan menurut Dinas Pekerjaan Umum Kota Surakarta.
g. Penelitian dilakukan pada distribusi pergerakan kendaraan yang terdiri dari semua jenis kendaraan sesuai pembagian dalam Manual Kapasitas Jalan Indonesia (MKJI) 1997.
h. Kapasitas ruas jalan, waktu tempuh, dan kecepatan dihitung menggunakan metode perhitungan pada MKJI.
i. Pejalan kaki diabaikan.
j. Metode pembebanan MAT yang digunakan adalah Metode Keseimbangan Wardrop (Wardrop Equilibrium) menggunakan bantuan aplikasi software
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
5
1.4
Tujuan Penelitian
Penelitian ini bertujuan untuk:
a. Mengetahui besar nilai parameter β yang merupakan fungsi hambatan dengan Metode Newton-Raphson.
b. Mengetahui estimasi MAT perjalanan dari data lalu lintas.
c. Mengetahui tingkat validitas dari arus lalu lintas hasil pemodelan dengan arus lalu lintas hasil pengamatan dilapangan.
1.5
Manfaat Penelitian
a. Manfaat Teoritis
Meningkatkan pengetahuan dan pemahaman dibidang perencanaan dan pemodelan transportasi.
b. Manfaat Praktis
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
6
BAB 2
LANDASAN TEORI
2.1
Tinjauan Pustaka
Beberapa penelitian tentang estimasi Matriks Asal-Tujuan perjalanan telah dilaksanakan oleh beberapa peneliti, diantaranya adalah sebagai berikut:
Abrahamsson (1998), menyatakan bahwa suatu matriks adalah hal penting dalam menggambarkan transportasi dalam sebuah daerah. Matriks mempunyai informasi tentang pergerakan antar zona pada sebuah daerah. MAT dapat diestimasi dengan menggunakan data traffic count jaringan jalan dan informasi lain yang tersedia. Hazelton (2002), menyatakan bahwa sebuah matriks asal-tujuan perjalanan yang akurat adalah sebuah bagian dasar dari sebuah model pembebanan lalu lintas. Beberapa metode yang digunakan untuk mendapatkan sebuah matriks yang membutuhkan survei dengan biaya yang mahal yang sering berakibat pada sedikitnya jumlah sampel data yang didapat dan jarang meninjau semua kemungkinan asal-tujuan pergerakan.
Nugroho (2007), telah melakukan sebuah penelitian tentang estimasi MAT dengan menggunakan data lalu lintas yang ada dan meghitung besarnya nilai parameter β dengan menggunakan metode kuadrat terkecil. Dalam penelitiannya, Nugroho mendapatkan jumlah total pergerakan Kota Surakarta adalah 29834,8 smp/jam dengan nilai parameter β sebesar -0,00125. Tingkat validasi dari model yang dihasilkan sebesar 0,8828.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
7
Kemudian pada tahun 2009, Nurmalia melakukan sebuah penelitian tentang estimasi MAT dari data arus lalu lintas dengan menggunakan software EMME/3. Penelitian ini bertujuan untuk mengetahui besarnya estimasi MAT dengan menggunakan metode estimasi Entropi Maksimum dan juga untuk mengetahui tingkat validasi dari arus lalu lintas hasil pemodelan dengan arus lalu lintas hasil pengamatan di lapangan. Dari hasil perhitungan dengan bantuan software
EMME/3, diperoleh jumlah total pergerakan Kota Surakarta adalah 34130 smp/jam dengan tingkat validasi model sebesar 0,867.
Pada tahun 2010, Widyasari melakukan penelitian tentang estimasi kinerja dan strategi penanganan jaringan jalan Kota Surakarta pada tahun rencana 2020 dan 2030. Penelitian dilakukan untuk membandingkan jumlah pergerakan menggunakan analisis MAT, mengevaluasi kinerja jaringan jalan Kota Surakarta menggunakan Nisbah Volume dan Kapasitas (NVK) dan juga memberikan alternatif penangan sistem jaringan jalan di Kota Surakarta tahun 2009, 2020 dan 2030. Dari hasil perhitungan dengan menggunakan software EMME/3, diperoleh jumlah pergerakan di Kota Surakarta pada tahun 2009 sebesar 32361 smp/jam, tahun 2020 sebesar 45516 smp/jam dan tahun 2030 sebesar 61706 smp/jam dengan tingkat pertumbuhan 3,3% per tahun. Pada tahun 2009 terdapat 2 ruas jalan dengan kondisi tidak stabil, tahun 2020 terdapat 61 ruas jalan yang kondisinya tidak stabil, dan pada tahun 2030 terdapat 195 ruas jalan dengan kondisi tidak stabil. Penanganan dilakukan berkaitan dengan peningkatan ruas jalan maupun manajemennya, dimana dalam penelitian tersebut dilakukan pemberlakuan sistem satu arah dan pelebaran jalan disesuaikan dengan kondisi nyata di lapangan.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
8
Dalam penelitian ini akan dilakukan estimasi MAT dengan menggunakan metode sintesis dengan model Gravity Batasan Bangkitan Pergerakan dengan menggunakan bantuan aplikasi software EMME/3 serta kalibrasi nilai parameter β
dengan metode Newton-Raphson dengan bantuan aplikasi software Free Pascal Lazarus yang belum pernah dilakukan pada penelitian-penelitian sebelumnya.
2.2
Dasar Teori
2.2.1 Konsep Perencanaan Transportasi
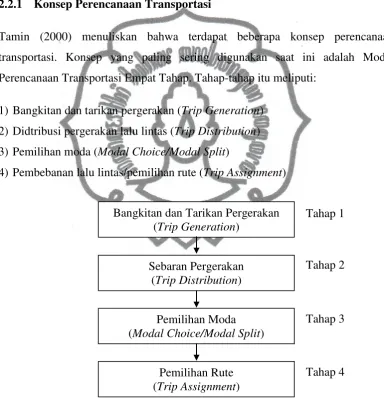
Tamin (2000) menuliskan bahwa terdapat beberapa konsep perencanaan transportasi. Konsep yang paling sering digunakan saat ini adalah Model Perencanaan Transportasi Empat Tahap. Tahap-tahap itu meliputi:
1) Bangkitan dan tarikan pergerakan (Trip Generation) 2) Didtribusi pergerakan lalu lintas (Trip Distribution) 3) Pemilihan moda (Modal Choice/Modal Split)
4) Pembebanan lalu lintas/pemilihan rute (Trip Assignment)
Gambar 2.1 Empat Tahap Pemodelan Transportasi Bangkitan dan Tarikan Pergerakan
(Trip Generation) Sebaran Pergerakan
(Trip Distribution) Pemilihan Moda (Modal Choice/Modal Split)
Pemilihan Rute (Trip Assignment)
Tahap 1
Tahap 2
Tahap 3
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
9
a. Bangkitan dan Tarikan Pergerakan
Bangkitan dan tarikan pergerakan adalah tahapan pemodelan yang memperkirakan jumlah pergerakan yang berasal dari suatu zona atau tata guna lahan dan jumlah pergerakan yang tertarik ke suatu tata guna lahan atau zona. Pergerakan lalu lintas merupakan fungsi tata guna lahan yang menghasilkan pergerakan lalu lintas.
b. Distribusi Pergerakan
Distribusi pergerakan adalah tahapan pemodelan yang memperkirakan sebaran yang meninggalkan suatu zona atau yang menuju suatu zona. Distribusi pergerakan dapat direpresentasikan dalam bentuk Matriks Asal-Tujuan (MAT) atau Origin-Destination Matrix (O-D Matrix) atau juga dapat dinyatakan dengan garis keinginan (Desire Line).
c. Pemilihan Moda
Jika interaksi terjadi antara dua tata guna lahan disuatu wilayah, maka akan diputuskan bagaimana interaksi tersebut harus dilakukan. Dalam kasus ini, keputusan harus ditentukan dalam hal pemilihan moda. Tujuan dari model pemilihan moda ini adalah untuk mengetahui proporsi pengalokasian perjalanan ke berbagai moda transportasi.
d. Pemilihan Rute
Seperti halnya dalam pemilihan moda transportasi, pemilihan rute juga tergantung pada beberapa alternatif seperti jarak terpendek, tercepat, dan termurah. Diasumsikan bahwa pemakai jalan mempunyai informasi yang cukup untuk menentukan rute yang terbaik.
2.2.2 Matriks Asal-Tujuan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
10
zona tujuan di dalam daerah tertentu dan selama periode waktu tertentu. Matriks Pergerakan atau Matriks Asal-Tujuan (MAT) sering digunakan oleh para perencana transportasi untuk menggambarkan pola pergerakan tersebut.
MAT adalah matriks berdimensi dua, yang berisi informasi mengenai besarnya pergerakan antar lokasi (zona) di dalam daerah tertentu. Baris menyatakan zona asal dan kolom menyatakan zona tujuan. Dalam hal ini, notasi Tid menyatakan
besarnya arus pergerakan (kendaraan, penumpang, dan barang) yang bergerak dari zona asal ike zona tujuan d selama selang waktu tertentu.
Pola pergerakan dapat dihasilkan jika suatu MAT dibebankan ke suatu sistem jaringan transportasi. Dengan mempelajari pola pergerakan yang terjadi, maka dapat mengidentifikasi permasalahan yang timbul sehingga beberapa solusi segera dapat dihasilkan. MAT dapat memberikan indikasi rinci mengenai kebutuhan akan pergerakan sehingga MAT memegang peran yang sangat penting dalam berbagai kajian perencanaan dan manajemen transportasi.
Jumlah zona dan nilai setiap sel matriks adalah dua unsur penting dalam MAT, karena jumlah zona menunjukkan banyaknya sel MAT yang harus didapatkan dan berisi informasi yang sangat dibutuhkan untuk perencanaan transportasi. Setiap sel membutuhkan informasi jarak, waktu, biaya, atau kombinasi ketiga informasi tersebut yang digunakan sebagai ukuran aksesibilitas (kemudahan).
2.2.3 Daerah Kajian
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
11
Hal pertama yang harus ditentukan dalam mendefinisikan sitem zona (kegiatan) dan sistem jaringan adalah cara membedakan daerah kajian dengan daerah atau wilayah lain diluar daerah kajian. Beberapa arahan untuk hal tersebut adalah: 1) Dalam menentukan daerah kajian seharusnya sudah dipertimbangkan sasaran
pelaksanaan kajian, permasalahan transportasi yang akan dimodel dan tipe pergerakan yang akan dikaji.
2) Untuk kajian yang bersifat strategis, daerah kajian harus didefinisikan sedemikian rupa sehingga mayoritas pergerakan mempunyai zona asal dan zona tujuan di dalam daerah kajian tersebut.
3) Daerah kajian sebaiknya sedikit lebih luas daripada daerah yang akan diamati sehingga kemungkinan adanya perubahan zona tujuan atau pemilihan rute yang lain dapat diamati.
Wilayah diluar daerah kajian sering dibagi menjadi beberapa zona eksternal yang digunakan untuk mencerminkan dunia lainnya. Daerah kajian sendiri dibagi menjadi beberapa zona internal yang jumlahnya sangat tergantung dari tingkat ketepatan yang diinginkan.
2.2.4 Sistem Zona
Sistem zona adalah suatu sistem tata guna lahan dimana satu satuan tata guna lahan diperoleh dengan membagi wilayah kajian menjadi bagian yang lebih kecil (zona), yang dianggap mempunyai keseragaman tata guna lahan atau berada di suatu daerah administrasi tertentu seperti kelurahan, kecamatan atau wilayah. Setiap zona akan diwakili oleh satu pusat zona. Pusat zona dianggap sebagai tempat atau lokasi awal pergerakan lalu lintas dari zona tersebut dan akhir pergerakan lalu lintas yang menuju zona tersebut.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
12
a. Ukuran zona sebaiknya dirancang sedemikian rupa sehingga galat pengelompokan yang timbul akibat asumsi pemusatan seluruh aktifitas pada suatu pusat zona menjadi tidak terlalu besar.
b. Batas zona sebaiknya harus sesuai dengan batas sensus, batas administrasi daerah, batas alami, atau batas zona yang digunakan oleh kajian terdahulu yang sudah dipandang sebagai kriteria utama.
c. Ukuran zona harus disesuaikan dengan kepadatan jaringan yang akan dimodel, biasanya ukuran zona semakin membesar jika semakin jauh dari pusat kota. d. Ukuran zona harus lebih besar dari yang seharusnya untuk memungkinkan arus
lalu lintas dibebankan ke atas jaringan jalan dengan kecepatan yang disyaratkan.
e. Batas zona harus dibuat sedemikian rupa sehingga sesuai dengan jenis pola pengembangan untuk setiap zona. Tipe tata guna lahan setiap zona sebaiknya homogen untuk menghindari tingginya pergerakan intrazonal dan untuk mengurangi tingkat kerumitan model.
f. Batas zona harus sesuai dengan batas daerah yang digunakan dalam pengumpulan data.
g. Ukuran zona ditentukan pula oleh tingkat kemacetan, ukuran zona pada daerah macet sebaiknya lebih kecil dibandingkan dengan daerah tidak macet.
2.2.5 Sistem Jaringan Transportasi
Sistem jaringan transportasi dicerminkan dalam bentuk ruas dan simpul, yang semuanya dihubungkan ke pusat zona. Sistem jaringan transportasi juga dapat ditetapkan sebagai urutan ruas jalan dan simpul. Ruas jalan bisa berupa potongan jalan raya atau kereta api, sedangkan simpul bisa berupa persimpangan atau stasiun. Setiap simpul dan zona diberi nomor. Nomor ini yang digunakan untuk mengidentifikasi data yang berkaitan dengan ruas dan zona.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
13
2.2.6 Fungsi Jalan
Jalan sebagai bagian sistem transportasi nasional mempunyai peranan penting terutama dalam mendukung bidang ekonomi, sosial dan budaya serta lingkungan. Menurut UU No. 38 Tahun 2004 tentang jalan, ada beberapa definisi jalan:
1) Jalan arteri merupakan jalan umum yang berfungsi melayani angkutan utama dengan ciri perjalanan jarak jauh, kecepatan rata-rata tinggi dan jumlah jalan masuk dibatasi secara berdaya guna.
2) Jalan kolektor merupakan jalan umum yang berfungsi melayani angkutan pengumpul atau pembagi dengan ciri perjalanan jarak sedang, kecepatan rata-rata sedang, dan jumlah jalan masuk dibatasi.
3) Jalan lokal merupakan jalan umum yang berfungsi melayani angkutan setempat dengan ciri perjalanan jarak dekat, kecepatan rata-rata rendah, dan jumlah jalan masuk tidak dibatasi.
4) Jalan lingkungan merupakan jalan umum yang berfungsi melayani angkutan lingkungan dengan ciri perjalanan jarak dekat, dan kecepatan rata-rata rendah. Menurut statusnya, jalan dikelompokkan menjadi:
1) Jalan nasional merupakan jalan arteri dan jalan kolektor dalam sistem jarinngan jalan primer yang menghubungkan antar ibukota provinsi, dan jalan strategis nasional, serta jalan tol.
2) Jalan provinsi merupakan jalan kolektor dalam sistem jaringan jalan primer yang menghubungkan ibukoata provinsi dengan ibukota kabupaten/kota, atau antar ibukota kabupaten/kota, dan jalan strategis provinsi.
3) Jalan kabupaten merupakan jalan lokal dalam sistem jaringan jaln primer yang tidak termasuk pada butir 1 dan butir 2, yang menghubungkan ibukota kabupaten dengan ibukota kecamatan, antar ibukota kecamatan, ibukota kabupaten dengan pusat kegiatan lokal, antar pusat kegiatan lokal, serta jalan umum dalam sistem jaringan jalan sekunder dalam wilayah kabupaten, dan jalan strategis kabupaten.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
14
pelayanan dengan persil, menghubungkan antar persil, serta menghubungkan antar pusat pemukiman yang berada di dalam kota.
5) Jalan desa merupakan jalan umum yang menghubungkan kawasan dan atau antar pemukiman di dalam desa, serta jalan lingkungan.
2.2.7 Satuan Mobil Penumpang
Manual Kapasitas Jalan Indonesia (MKJI), 1997, mendefinisikan satuan mobil penumpang (smp) adalah satuan untuk arus lalu lintas dimana berbagai tipe kendaraan diubah menjadi arus kendaraan ringan (termasuk mobil penumpang) dengan menggunakan Ekivalen Mobil Penumpang (emp). Ekivalen Mobil Penumpang (emp) adalah faktor yang menunjukkan pengaruh berbagai tipe kendaraan dibandingkan kendaraan ringan terhadap kecepatan kendaraan ringan dalam arus lalu lintas (untuk mobil penumpang dan kendaraan ringan yang mirip, emp = 1).
Pembagian tipe kendaraan bermotor untuk masing-masing kendaraan berdasarkan MKJI 1997:
1) Sepeda Motor, Motor Cycle (MC), terdiri dari kendaraan bermotor beroda dua atau tiga.
2) Kendaraan Ringan, Light Vehicle (LV), yaitu kendaraan bermotor dua as beroda empat dengan jarak as 2-3 meter, termasuk diantaranya mobil penumpang, oplet, mikrobus, pick-up dan truk kecil.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
15
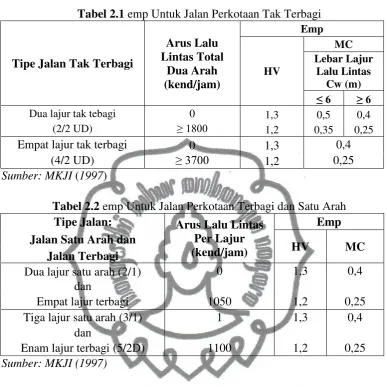
Nilai emp untuk jalan perkotaan ditunjukkan pada Tabel 2.1 dan Tabel 2.2.
Tabel 2.1 emp Untuk Jalan Perkotaan Tak Terbagi
Tipe Jalan Tak Terbagi
Tabel 2.2 emp Untuk Jalan Perkotaan Terbagi dan Satu Arah
Tipe Jalan: Arus Lalu Lintas Per Lajur
Menurut Dirjen Bina Marga, kapasitas adalah volume maksimum kendaraan per jam yang melalui suatu potongan lajur jalan (untuk jalan multi lajur) atau suatu potongan jalan (untuk jalan dua lajur) pada kondisi jalan dan arus lalu lintas ideal. Faktor-faktor yang mempengaruhi kapasitas jalan adalah lebar jalur atau lajur, ada tidaknya pemisah/median jalan, hambata bahu/kereb jalan, gradien jalan, di daerah perkotaan atau luar kota, ukuran kota. Besarnya kapasitas suatu ruas jalan dapat dihitung dengan Persamaan (2.1) berikut:
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
16
Dimana:
C = Kapasitas (smp/jam)
Co = Kapasitas dasar untuk kondisi tertentu (ideal) (smp/jam) FCw = Faktor penyesuaian lebar jalur lalu lintas
FCsp = Faktor penyesuaian pemisah arah
FCsf = Faktor penyesuaian hambatan samping
FCcs = Faktor penyesuaian ukuran kota
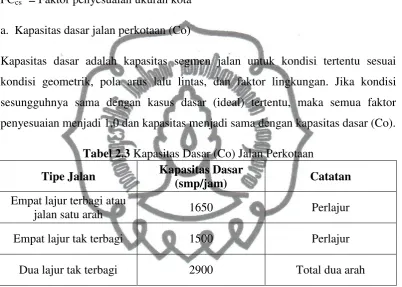
a. Kapasitas dasar jalan perkotaan (Co)
Kapasitas dasar adalah kapasitas segmen jalan untuk kondisi tertentu sesuai kondisi geometrik, pola arus lalu lintas, dan faktor lingkungan. Jika kondisi sesungguhnya sama dengan kasus dasar (ideal) tertentu, maka semua faktor penyesuaian menjadi 1,0 dan kapasitas menjadi sama dengan kapasitas dasar (Co).
Tabel 2.3 Kapasitas Dasar (Co) Jalan Perkotaan
Tipe Jalan Kapasitas Dasar
(smp/jam) Catatan
Empat lajur terbagi atau
jalan satu arah 1650 Perlajur Empat lajur tak terbagi 1500 Perlajur
Dua lajur tak terbagi 2900 Total dua arah
Sumber: MKJI (1997)
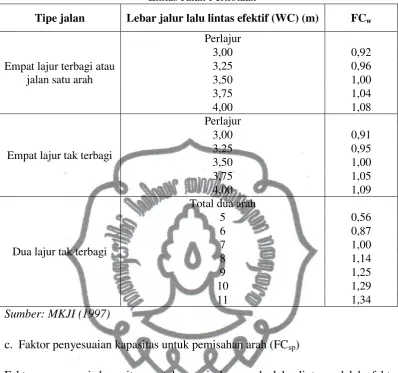
b. Faktor penyesuai kapasitas untuk lebar jalur lalu lintas (FCw)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
17
Tabel 2.4 Faktor Penyesuaian Kapasitas (FCw) Untuk Pengaruh Lebar Jalur Lalu
Lintas Jalan Perkotaan
Tipe jalan Lebar jalur lalu lintas efektif (WC) (m) FCw
Empat lajur terbagi atau
c. Faktor penyesuaian kapasitas untuk pemisahan arah (FCsp)
Faktor penyesuai kapasitas untuk pemisahan arah lalu lintas adalah faktor penyesuai kapasitas dasar akibat pemisahan arah lalu lintas (hanya pada jalan dua arah tak terbagi). Faktor ini mempunyai nilai paling tinggi pada prosentase pemisahan arah 50%-50% yaitu bilamana arus pada kedua arah adalah sama pada periode waktu yang dianalisis (umumnya satu jam).
Tabel 2.5 Faktor Penyesuaian Kapasitas Untuk Pemisahan Arah (FCsp)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
18
d. Faktor penyesuaian kapasitas untuk pengaruh hambatan samping (FCsf)
Faktor penyesuai kapasitas untuk hambatan samping adalah faktor penyesuai kapasita dasar akibat hambatan samping sebagai fungsi lebar bahu. Hambatan samping ini dipengaruhi oleh berbagai aktifitas disamping jalan yang berpengaruh terhadap arus lalu lintas. Hambatan samping yang terutama berpengaruh pada kapasitas dan kinerja jalan perkotaan:
Jumlah pejalan kaki berjalan atau menyebrang sisi jalan.
Jumlah kendaraan berhenti diparkir.
Jumlah kendaraan masuk dan keluar ke/dari lahan samping jalan dan jalan sisi.
Jumlah kendaraan yang bergerak lambat yaitu arus total (kend/jam) dari sepeda, becak, delman, pedati, dan sebagainya.
Tabel 2.6 Faktor Penyesuaian Kapsitas (FCsf) Untuk Pengaruh Hambatan
Samping dan Lebar Bahu
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
19
Tabel 2.7 Faktor Penyesuaian Kapsitas (FCsf) Untuk Pengaruh Hambatan
Samping dan Jarak Kereb-Penghalang (FCsf) Tipe
Jalan
Kelas Hambatan
Samping
Faktor Penyesuaian Hambatan Samping dan Lebar Bahu (FCsf)
Untuk mengetahui tingkat hambatan samping pada kolom (2) Tabel(2.6 dan 2.7)
dengan melihat kolom (3) Tabel 2.8 dibawah ini, tetapi apabila data terinci hambatan samping tersebut tersedia maka hambatan samping dapat ditentukan dengan prosedur berikut:
1) Periksa mengenai kondisi khusus dari kolom (4) Tabel 2.8 dan pilihsalah satu yang yang paling tepat untuk keadaan segmen jalan yang dianalisa.
2) Amati foto pada gambar A-4:1-5 (MKJI 1997) yang menunjukkan kesan visual rata-rata yang khusus dari masing-masing kelas hambatan samping. Dan pilih slah satu yang paling sesuai dengan kondisi rata-rata sesungguhnya pada kondisi lokasi untuk periode yang diamati.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
20
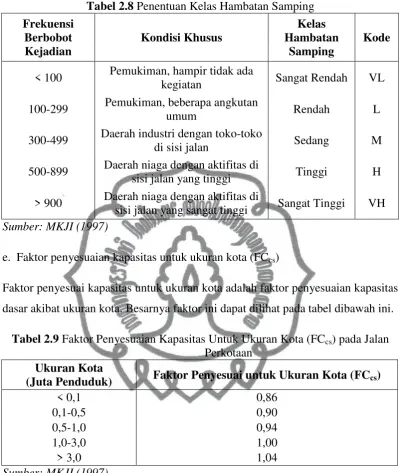
Tabel 2.8 Penentuan Kelas Hambatan Samping
Frekuensi
< 100 Pemukiman, hampir tidak ada
kegiatan Sangat Rendah VL 100-299 Pemukiman, beberapa angkutan
umum Rendah L
300-499 Daerah industri dengan toko-toko
di sisi jalan Sedang M 500-899 Daerah niaga dengan aktifitas di
sisi jalan yang tinggi Tinggi H > 900 Daerah niaga dengan aktifitas di
sisi jalan yang sangat tinggi Sangat Tinggi VH
Sumber: MKJI (1997)
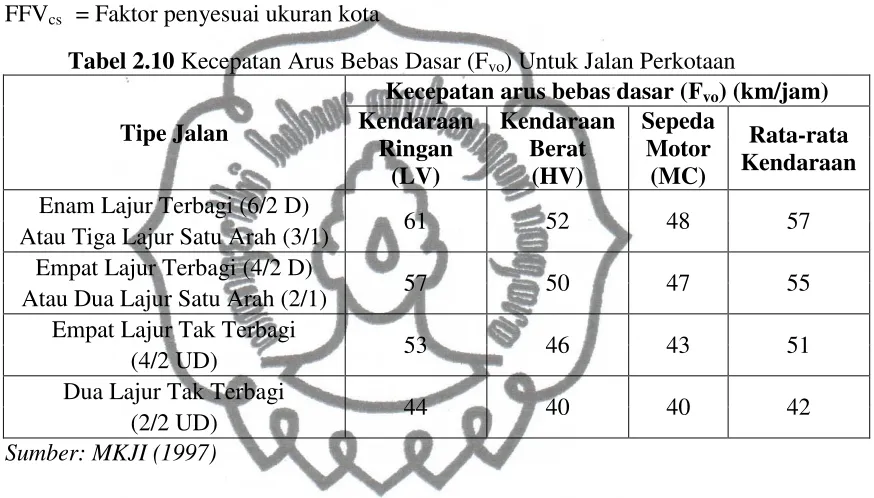
e. Faktor penyesuaian kapasitas untuk ukuran kota (FCcs)
Faktor penyesuai kapasitas untuk ukuran kota adalah faktor penyesuaian kapasitas dasar akibat ukuran kota. Besarnya faktor ini dapat dilihat pada tabel dibawah ini.
Tabel 2.9 Faktor Penyesuaian Kapasitas Untuk Ukuran Kota (FCcs) pada Jalan
Perkotaan
Ukuran Kota
(Juta Penduduk) Faktor Penyesuai untuk Ukuran Kota (FCcs)
< 0,1 0,86
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
21
FV = (Fvo + FVw) × FFVsf × FFVcs (2.2)
Dimana,
FV = Kecepatan arus bebas kendaraan ringan sesungguhnya (km/jam) Fvo = Kecepatan arus bebas dasar kendaraan ringan (km/jam)
FVw = Penyesuaian lebar jalur lalu lintas efektif (km/jam)
FFVsf = Faktor penyesuai kondisi hambatan samping
FFVcs = Faktor penyesuai ukuran kota
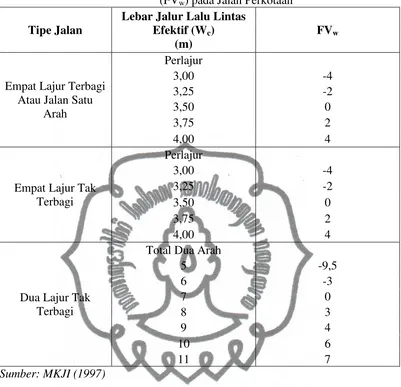
Tabel 2.10 Kecepatan Arus Bebas Dasar (Fvo) Untuk Jalan Perkotaan
Tipe Jalan
Kecepatan arus bebas dasar (Fvo) (km/jam)
Kendaraan
Enam Lajur Terbagi (6/2 D)
61 52 48 57
Atau Tiga Lajur Satu Arah (3/1) Empat Lajur Terbagi (4/2 D)
57 50 47 55
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
22
Tabel 2.11 Penyesuaian Kecepatan Arus Bebas Untuk Lebar Jalur Lalu Lintas (FVw) pada Jalan Perkotaan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
23
Tabel 2.12 Faktor Penyesuaian (FFVsf) Untuk Pengaruh Hambatan Samping dan
Lebar Bahu pada Kecepatan Arus Bebas Untuk Jalan Perkotaan dengan Bahu
Faktor Penyesuaian Hambatan Samping dan Lebar Bahu (FFVsf)
Tabel 2.13 Faktor Penyesuaian (FFVsf) Untuk Pengaruh Hambatan Samping dan
Jarak Kereb Penghalang Jalan Perkotaan dengan Kereb
Tipe Jalan
Kelas Hambatan
Samping
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
24
Faktor penyesuaian kecepatan arus bebas untuk jalan enam lajur dapat ditentukan dengan menggunakan nilai FFVsf untuk jalan empat lajur yang diberikan pada
Tabel 2.12 atau 2.13 dan disesuaikan seperti rumus 2.3 dibawah ini:
FFV6sf = 1-0,8 × (1- FFV4sf) (2.3)
Dimana:
FFV6sf = Faktor penyesuai kecepatan arus bebas untuk enam lajur (km/jam)
FFV4sf = Faktor penyesuai kecepatan arus bebas untuk empat lajur (km/jam)
Untuk penentuan kelas hambatan samping sama dengan Tabel 2.8 diatas, sedangkan faktor penyesuaian kecepatan untuk ukuran kota dapat dilihat pada
Tabel 2.14 dibawah ini.
Tabel 2.14 Faktor Penyesuaian Untuk Pengaruh Ukuran Kota pada Kecepatan Arus Bebas Kendaraan Jaringan Untuk Jalan Perkotaan
Ukuran Kota
(Juta Penduduk) Faktor Penyesuai untuk Ukuran Kota (FVcs)
< 0,1 0,90
0,1-0,5 0,93
0,5-1,0 0,95
1,0-3,0 1,00
> 3,0 1,03
Sumber: MKJI (1997)
Kecepatan kendaraan pada arus lalu lintas dapat dihitung dengan menggunakan rumus 2.4 berikut:
V = Vo × 0,5 (1+(1-(Q/C))0,5) (2.4) Dimana:
V = Kecepatan sesungguhnya pada saat ada arus lalu lintas Q Vo = Kecepatan arus bebas
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
25
Jika arus pada ruas jalan tersebut telah mencapai kapasitas (Q/C = 1), maka rumus 2.4 menjadi:
V = 0,5Vo (2.5)
2.2.10 Hubungan Kurva Kecepatan-Arus dan Biaya-Arus
Dalam rekayasa lalu lintas dikenal hubungan yang sangat sering digunakan yaitu pengaruh arus pada kecepatan kendaraan yang bergerak pada ruas jalan tertentu. Hubungan kapasitas-arus sering digambarkan seperti pada gambar 2.1 jika arus lalu lintas meningkat, kecepatan cenderung menurun secara perlahan. Jika arus mendekati kapasitas, penurunan kecepatan semakin besar.
Gambar 2.2 Hubungan Tipikal Kecepatan-Arus dan Biaya-Arus
Apabila kondisi tersebut dipaksakan untuk mendapatkan arus yang melebihi kapasitas, maka akan terjadi kondisi yang tidak stabil dengan kecepatan yang lebih rendah.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
26
Ca = Ca({V}) (2.6)
Biaya pada suatu ruas jalan merupakan fungsi dari semua pergerakan V pada jaringan tersebut (bukan hanya biaya yang disebabkan oleh arus diruas jalan itu saja)
Rumus umum ini cocok untuk daerah perkotaan yang memiliki interaksi yang erat antara arus lalu lintas diruas jalan yang lain dengan tundaan, tetapi hal ini dapat disederhanakan jika mempertimbangkan ruas jalan yang panjang, dimana semua waktu perjalanan digunakan pada ruas jalan tersebut. Dalam hal ini persamaan yang digunakan harus terpisah, yang dapat ditulis sebagai berikut:
Ca = Ca(Va) (2.7)
Biaya pad ruas jalan tersebut hanya tergantung pada arus dan ciri ruas itu saja. Asumsi ini dapat menyederhanakan proses penaksiran, pengembangan fungsi serta penggunaan metode pembebanan yang sesuai.
Ofyar Z. Tamin (2000) yang dikutip dari Branston (1976) menulis beberapa kurva baiya-arus yang diusulkan oleh beberapa penulis sebagai berikut:
1) Smock (1962) mengemukakan rumus berikut untuk kajian Deroit
t = t0 exp
(
)
(2.8)
t adalah waktu tempuh per satuan jarak, t0 adalah waktu per satuan jarak pada
kondisi arus bebas, dan Qs adalah kapasitas ruas pada kondisi tunak. 2) Overgaard (1976) menuliskan persamaan dalam bentuk lain, yaitu:
t = t0
( )
(2.9)
QPadalah kapasitas praktis dari ruas jalan, sedangkan α dan β adalah parameter
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
27
3) Dinas Jalan Umum (1964) di Amerika Serikat menyarankan fungsi yang sangat umum, yaitu:
t = t0[ ( ) ] (2.10)
4) IHCM (Indonesian Highway Capacity Manual) 1994, melakukan beberapa kajian mengenai hubungan antara kecepatan-arus pada beberapa ruas jalan antarkota di Indonesia (4 lajur dan 2 lajur). Hubungan matematis yang cukup baik telah dihasilkan oleh kajian ini:
V = FV ×
[ (
)
( )]
( )(2.11)
*
( )( )+
( )(2.12)
Dimana:
FV = Kecepatan arus bebas
D = Kepadatan (smp/km) (dihitung sebagai Q/V) Dj = Kepadatn pada kondisi macet total
Do = Kepadatan pada saat kapasitas jalan tercapai
L, M = Konstanta
2.2.11 Model Gravity
Model Gravity menggunakan konsep gravity yang berasumsi bahwa ciri bangkitan dan tarikan pergerakan berkaitan dengan beberapa parameter zona asal, misalnya populasi dan nilai sel MAT yang berkaitan dengan aksesibilitas (kemudahan) sebagai fungsi jarak, waktu, atau biaya. Model Gravity untuk keperluan transportasi menyatakan bahwa pergerakan antar zona asal i dan zona tujuan d
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
28
jarak antara kedua zona tersebut. Dalam bentuk matematis model gravity dapat dinyatakan sebagai: T = Oi . Dd . f(Cid) (2.13)
Persamaan 2.13 dapat digunakan dengan batasan sebagai berikut:
∑ dan ∑ (2.14) Sehingga pengembangan Persamaan 2.13 dengan menggunakan batasan Persamaan 2.14 adalah sebagai berikut:
T = Oi . Dd . Ai . Bd . f(Cid) (2.15)
T = Jumlah pergerakan dari zona asal i ke zona tujuan d
Ai, Bd = Faktor penyeimbang untuk setiap zona asal i dan tujuan j Oi = Total pergerakan dari zona asal i
Dd = Total pergerakan ke zona tujuan d f(Cid) = Fungsi umum biaya perjalanan
Persamaan 2.15 dipenuhi jika digunakan konstanta Ai dan Bd (disebut sebagai konstanta penyeimbang) yang terkait dengan setiap zona bangkitan dan tarikan.
Ai =
∑ ( ) Bd = ∑ ( ) (2.16)
Untuk mendapatkan kedua nillai tersebut perlu dilakukan proses iterasi sampai masing-masing nilai Ai dan Bd menghasilkan nilai tertentu (konvergen).
Dalam buku Tamin (2000), yang dinyatakan oleh Hyman (1969), menyarankan 3 jenis fungsi hambatan yang dapat dipergunakan dalam Model Gravity, yaitu: a. Fungsi pangkat : f(Cid) = C (2.17)
b. Fungsi eksponensial : f(Cid) = (2.18)
c. Fungsi Tanner : f(Cid) = C . (2.19)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
29
2.2.11.1 Model Gravity Batasasn Bangkitan Pergerakan (Production
Constraint Gravity)
Dalam model gravity batasan bangkitan pergerakan, total pergerakan global hasil bangkitan pergerakan harus sama dengan total pergerakan yang dihasilkan oleh pemodelan, begitu juga dengan bangkitan pergerakan yang dihasilkan model harus sama dengan hasil bangkitan pergerakan yang diinginkan. Namun, tarikan pergerakan tidak perlu memiliki nilai yang sama dengan hasil pemodelan. Model yang digunakan adalah model dari Persamaan (2.15), tetapi dengan syarat batas yang berbeda. Syarat batas yang digunakan dalam model ini adalah sebagai berikut.
Ai =
∑ ( ) untuk seluruh i dan Bd = 1 untuk seluruh d.
Alasan pemilihan Model Gravity adalah sebagai berikut:
a. Model Gravity dapat digunakan untuk meramalkan arus lalu lintas antar zona di dalam daerah perkotaan.
b. Model Gravity sangat sederhana sehingga mudah dimengerti dan digunakan. c. Model Gravity mempunyai kinerja yang baik karena prosesnya yang cepat.
2.2.12 Kalibrasi
Kalibrasi adalah proses menaksir nilai parameter β yang merupakan parameter fungsi hambatan (kemudahan atau aksesibilitas) antar zona suatu model dengan berbagai teknik yang sudah ada. Setelah dikalibrasi, diharapkan model tersebut dapat menghasilkan keluaran yang sama dengan data lapangan (realita).
a. Kalibrasi Newton-Raphson
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
30
Nilai f(x) didekati dengan menggunakan garis singgung f(x) pada nilai x. Titik potong garis singgung ini dengan sumbu x digunakan sebagai pendekatan selanjutnya. Secara ringkas, metode tersebut dijelaskan sebagai berikut ini. Misalnya diketahui dua buah persamaan f dan g yang masing-masing adalah
Pendekatan deret Taylor sampai tingkat pertama untuk kedua persamaan simultan ini menghasilkan:
Dengan memasukkan Persamaan 2.21 dan 2.22 kedalam Persamaan 2.23 dan 2.24, didapat:
perpustakaan.uns.ac.id digilib.uns.ac.id dapat dihitung dengan metode eliminasi Gauss-Jordan. Selanjutnya nilai h dan nilai k ini digunakan untuk mendapatkan nilai pendekatan berikutnya:
x1= x0 + h dan y1 = y0 + k (2.28)
Perhitungan dengan Persaman 2.27 dan Persamaan 2.28 diulangi sampai nilai x
dan y konvergen. Konvergensi dapat dilihat dari nilai h dan k yang semakin mengecil. Perhitungan dihentikan bila nilai h dan k sudah mencapai harga yang diinginkan. Jadi, batas nilai h dan k yang sekaligus juga menunjukkan tingkat ketelitian perhitungan.
perpustakaan.uns.ac.id digilib.uns.ac.id dengan menggunakan Persamaan (2.37) – (2.39) berikut.
= ( ) (2.37)
3) Menggunakan βm, mengulangi tahap 1 dan 2 untuk mendapatkan nilai h seperti
yang disyaratkan, sampai nilai β konvergen (nilai h mencapai nilai yang sangat kecil).
2.2.13 Pembebanan User Equilibrium
Pertimbangan utama pembebanan lalu lintas merupakan asumsi bahwa dasar pemilihan rute adalah biaya perjalanan. Ukuran yang digunakan tergantung pada karakteristik jalan, kondisi lalu lintas dan persepsi pengendara tentang kondisi tersebut.
Dalam hal ini efek stokastik tidak diperhitungkan. Ada dua perilaku yang diusulkan sebagai dasar dari kondisi equlibrium, yaitu:
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
33
2. Pengendara memilih rute yang menghasilkan arus lalu lintas yang meberikan keuntungan maksimum bagi mereka.
Pendekatan pembebanan User Equilibrium mengacu pada Prinsip Wardrop I yang menyatakan bahwa dalam kondisi macet, pengendara akan memilih suatu rute sampai tercapai kondisi yang tidak memungkinkan seorang pun dapat mengurangi biaya perjalanannya dengan menggunakan rute yang lain. Apabila semua pengendara mempunyai persepsi yang sama tentang biaya maka akan dihasilkan kondisi keseimbangan, artinya semua rute yang digunakan antara dua titik tertentu akan mencapai baiaya perjalanan yang sama dan minimum, sedangkan rute yang tidak digunakan akan mencapai biaya perjalanan yang sama atau lebih mahal. Kemajuan besar dalam teknik pembebanan dengan peminimuman fungsi obyektif adalah dimungkinkannya analisa pengembangan algoritma yang sistematik untuk pemecahannya. Algoritma yang sangat umum digunakan adalah Algoritma Frank Wolf (1956). Langkah-langkah dalam proses pembebanan tersebut adalah sebagai berikut:
1. Memilih satu set inisial biaya ruas, yang bisa digunakan adalah waktu tempuh pada kondisi bebas Ca(0). Inisialisasi semua arus V = 0, kemudian set n = 0. 2. Membentuk suatu pohon biaya minimum, kemudian set n = n+1.
3. Membebankan semua matriks T dengan pembebanan All-or-Nothing untuk mendapatkan suatu set arus Va.
4. Menghitung arus pada saat sekarang dengan persamaan:
V = (1-ϕ) V + ϕVa (2.41) 5. Menghitung satu set baru biaya arus berdasarkan besar arus V . Jika arus (atau
biaya ruas) tidak terlalu banyak mengalami perubahan dalam dua kali pengulangan yang berurutan maka proses dihentikan, dan jika tidak banyak perubahan maka diteruskan ke tahap 2.
Dalam penelitian ini proses pembebanan dilakukan dengan bantuan aplikasi
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
34
2.2.14 Matrix Estimation by Maximum Entropy
Persoalan pokok pada perkiraan matriks perjalanan dari data lalu lintas adalah identifikasi pasangan asal-tujuan yang menggunakan ruas tertentu sebagai bagian dari perjalanannya. Variabel ini dinamakan Pija, yaitu proporsi perjalanan dari asal
i ke tujuan j yang menggunakan ruas a. Arus pada ruas a (Va) adalah penjumlahan
seluruh konstribusi perjalanan antara setiap pasangan zona pada ruas tersebut, secara matematis dapat dinyatakan dengan persamaan berikut:
Va = ∑ (2.42)
Batasan: 0 ≤ Pija≤ 1
Batas persamaan 2.41 memberikan hasil yang sempurna jika arus pada ruas a dari hasil pemodelan sama dengan arus dari hasil pengamatan.
⋁ ∑ (2.43) Dengan:
Tij = Matriks perjalanan sebenarnya
Pija = Proporsi perjalanan dari i ke j yang menggunakan a
Va = Arus dari ruas a yang didapat dari hasil pemodelan
V ^a = Arus diruas a dari hasil pengamatan
Dalam prakteknya jumlah data arus lalu lintas dari hasil pengamatan jauh lebih sedikit dibandingkan jumlah Tij yang diketahui. Dengan kondisi tersebut, tidak
mungkin menentukan solusi yang unik terhadap masalah estimasi matriks perjalanan, oleh karena itu sebagian besar metode berusaha untuk mendapatkan matriks perjalanan Tij yang paling mirip yang memenuhi batasan persamaan
tersebut.
Ada dua pendekatan untuk menyelesaikan persamaan 2.43, yang pertama, apabila tidak terdapat informasi sebelumnya tentang Tij (no prior trip matrix) dan yang
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
35
Model Matrix Estimation by Maximum Entropy yang dikembangkan oleh Wilimsen memberikan persamaan dasar untuk kedua pendekatan diatas sebagai berikut:
Tij = ∏ (2.44)
Atau
Tij = tij∏ (2.45)
Dengan:
tij = Perkiraan matriks perjalanan (misal dari survai sebelumnya)
Xa = Faktor penyeimbang (balancing factor) yang dipilih sedemikian rupa
sehingga batasan Persamaan 2.43 terpenuhi.
2.2.15 Indikator Uji Statistik
a. Root Mean Square Error (RMSE) dan Standard Deviasi (SD)
Penaksiran MAT dari data lalu lintas yang dihasilkan dengan menggunakan penaksiran model kebutuhan akan transportasi akan menghasilkan arus lalu lintas yang semirip mungkin dengan data arus lalu lintas hasil pengamatan. Hal terpenting yang harus diperhatikan yaitu tingkat kemiripan dari MAT hasil penaksiran dengan MAT hasil pengamatan. Tingkat akurasi MAT yang dihasilkan dari data arus lalu lintas dapat ditentukan dengan beberapa indikator uji statistik. Indikator uji statistik yang digunakan dalam penelitian ini adalah Root Mean Square Error (RMSE) dan standard deviasi (SD).
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
36
RMSE = √∑ ∑ [( )
( )] untuk i ≠ d (2.46)
Beberapa peneliti menggunakan standar deviasi dari simpangan dapat didefinisikan sebagai Persamaan 2.47 berikut:
SD = √∑ ∑ [( )
( ) ] untuk i ≠ d (2.47)
Dimana:
Ťid = Matriks hasil pengamatan dilapangan
Tid = Matriks hasil pemodelan
N = Ukuran matriks
Indikator RMSE dan SD tidak dapat digunakan untuk membandingkan MAT yang dihasilkan dari lokasi yang berbeda atau waktu yang berbeda karena nilainya sangat tergantung dari kondisi lokal seperti ukuran matriks N dan T. Dari Persamaan 2.46 dan Persamaan 2.47 terlihat bahwa semakin besar nilai N maka nilai RMSE akan kira-kira sama dengan nilai SD. Indikator %RMSE digunakan untuk membandingkan dua buah MAT yang mempunyai jumlah sel yang berbeda.
%RMSE = ( ) (2.48)
T1 = ( )∑ ∑ (2.49)
Semakin besar nilai RMSE, %RMSE, dan SD maka semakin tidak akurat MAT hasil penaksiran dibandingkan MAT hasil pengamatan.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
37
b. Koefisien Determinasi (R2)
Indikator statistik R2 untuk matriks dapat didefinisikan sebagai Persamaan 2.50. R2 = ∑ ∑ ( )
∑ ∑ ( )
untuk i≠ d (2.50) Sedangkan indikator uji statitistik R2 untuk menguji tingkat validasi arus lalu lintas hasil pemodelan dengan arus lalu lintas yang ada di lapangan digunakan Persamaan 2.51.
R2 = ∑ ( )
∑ ∑ (2.51)
Dimana:
Ťid = Matriks hasil pengamatan dilapangan
Tid = Matriks hasil pemodelan
N = Ukuran matriks = Arus hasil pemodelan
= Arus hasil pengamatan dilapangan
Indikator statistik R2 merupakan uji statistik yang paling sering digunakan. Indikator ini akan memberikan bobot sangat tinggi untuk kesalahan absolut besar. Oleh karena itu, nilai R2 yang tinggi tidak dapat diperoleh dari matriks berjumlah sel besar dengan kesalahan kecil, akan tetapi akan sangat jelek pada nilai sel yang kecil.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
38
BAB 3
METODE PENELITIAN
3.1
Lokasi Penelitian
Batas wilayah studi pada penelitian ini adalah seluruh wilayah Kota Surakarta dan beberapa daerah tingkat II seperti Kabupaten Karanganyar, Kabupaten Boyolali, dan Kabupaten Sukoharjo. Kabupaten-kabupaten tersebut sangat mempengaruhi pola pergerakan karena secara administratif berbatasan langsung dengan Kota Surakarta.
Penelitian ini mengambil wilayah studi di Kota Surakarta. Kota Surakarta yang terletak di Provinsi Jawa Tengah bagian selatan yang memiliki kepadatan lalu lintas yang cukup tinggi. Secara geografis Kota Surakarta terletak pada
110’45’15’-110’45’35’ BT dan 70’36’00’-70’56’00’ LS berbatasan dengan daerah tingkat II yang lain, yaitu di sebelah utara berbatasan dengan Kabupaten Karanganyar dan Kabupaten Boyolali, sebelah selatan dengan Kabupaten Sukoharjo, sebelah barat dan timur dengan Kabupaten Sukoharjo dan Karanganyar.
Luas wilayah Surakarta kurang lebih 44,040 km2 yang terbagi dalam lima kecamatan dan terdiri dari 51 kelurahan. Jumlah penduduk mencapai 566.768 jiwa manusia (menurut statistik terakhir tahun 2009) dengan kepadatan mencapai 12.716 jiwa/km2. Wilayah Surakarta dibagi menjadi 51 zona internal berdasarkan batas administrasi kelurahan seperti yang terlihat pada Gambar 3.1 dan 14 zona eksternal. Peta pembagian zona di Kota Surakarta dapat dilihat pada Gambar 3.2.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
39
3.3. Berikut adalah lokasi survey (traffic count) arus lalu lintas dibeberapa ruas jalan di Kota Surakarta.
Tabel 3.1 Lokasi Survey (Traffic Count) Arus Lalu Lintas 2012 Surakarta
NODE
Nama Jalan Lokasi
1 2
1 C53
Jalan Ahmad Yani Depan RS. Orthopedi C53 1
2 3
Jalan Slamet Riyadi Depan Solo Square
3 2
6 7
Jalan Slamet Riyadi Depan Pizza Hut
7 6
21 22 Jalan Slamet Riyadi Depan BCA
23 C52
Jalan Adi Sucipto Depan Solo Pos C52 23
25 26
Jalan Adi Sucipto Depan Stadion Manahan 26 25
34 35
Jalan Ahmad Yani Depan Hotel Grand Setiakawan 35 34
55 C65
Jalan Ring Road Sebelum Jembatan C65 55
66 67
Jalan Dr. Radjiman SPBU Pasar Kabangan 67 66
86 91
Jalan Kolonel Sutarto Barat RS Dr. Moewardi 91 86
92 241
Jalan Ir. Sutami Timur UNS 241 92
95 C59
Jalan Raya Palur Km.5 Depan UNSA C59 95
105 C56
Jalan Yos Sudarso Depan Radio Prambors C56 105
143 144
Jalan Kyai Mojo Sebelum Jembatan Arah Baturono 144 143
271 C62
40
41
42
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
43
Tabel 3.2 Data Nomor Zona dan Nama Zona Internal Departemen Pekerjaan Umum
16 Serengan 46 Purwodiningratan
17 Danukusuman 47 Jagalan
18 Joyotakan 48 Pucangsawit
19 Kampung Baru 49 Sudiroprajan
20 Kauman 50 Gandekan
Tabel 3.3 Data Nomor Zona dan Nama Zona Eksternal Departemen Pekerjaan Umum
No. Zona Nama Zona
52 Colomadu 53 Pabelan Kartosuro 54 Makam Haji Kartosuro 55 Cemani
61 Jl. Clolo arah Karanganyar 62 Arah Purwodadi
63 Ngemplak Boyolali 64 Gentan Sukoharjo