TUGAS AKHIR
ANALISA PERBANDINGAN EFISIENSI MOTOR DC KOMPON
PENDEK DENGAN MOTOR DC KOMPON PANJANG AKIBAT
PENAMBAHAN KUTUB
Oleh :070402011
FUAD RAHIM SITOMPUL
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ANALISA PERBANDINGAN EFISIENSI MOTOR DC KOMPON
PENDEK DENGAN MOTOR DC KOMPON PANJANG AKIBAT
PENAMBAHAN KUTUB
Oleh :
070402011
FUAD RAHIM SITOMPUL
Disetujui oleh:
Pembimbing,
NIP. 195306221981031002
Ir. SYAMSUL AMIEN, M.S
Diketahui oleh:
Ketua Departemen Teknik Elektro FT USU,
NIP. 19540531 198601 1002
Ir. SURYA TARMIZI KASIM, M.Si
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Motor listrik merupakan perangkat elekromagnetis yang mengubah energi listrik
menjadi energi mekanik. Motor DC memerlukan tegangan searah pada kumparan medan untuk diubah menjadi energi mekanik. Energi mekanik ini digunakan sebagai penggerak peralatan listrik seperti pompa,penggerak kipas angin, lift dan lain-lain.
Karena penggunaannya yang cukup luas maka kinerjanya harus baik. Kinerja suatu motor DC dikatakan baik jika efisiensi motor tersebut tinggi. Hal itu dapat dicapai
dengan mengatur bagian-bagian tertentu dari motor. Perubahan posisi sikat pada motor DC mempengaruhi efisiensinya.
Dalam tugas akhir ini penulis akan melakukan analisis perbandingan efisiensi
motor DC kompon pendek dengan motor DC kompon panjang akibat penambahan kutub. Dimana efisiensi motor dc kompon panjang lebih efektif dari pada efisiensi
motor dc kompon pendek. Nilai efisiensi tertinggi dari motor dc kompon panjang akibat penambahan kutub adalah 81.92% terhadap torsi beban 0.6 kg. Dan efisiensi tertinggi dari motor dc kompon pendek akibat penambahan kutub adalah 80.16% terhadap torsi
KATA PENGANTAR
Puji dan syukur penulis ucapkan kepada Allah SWT dan Nabi Kita Muhammad SAWatas berkat, rahmat dan karunia yang dilimpahkan sehingga penulis dapat
menyelesaikan Tugas Akhir yang berjudul:
“
ANALISA PERBANDINGAN EFISIENSI MOTOR DC KOMPON
PENDEK DENGAN MOTOR DC KOMPON PANJANG AKIBAT
PENAMBAHAN KUTUB
”Tugas akhir ini merupakan bagian dari kurikulum yang harus diselesaikan untuk memenuhi persyaratan menyelesaikan pendidikan Sarjana Strata Satu (S-1) di
Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara. Selama penulis menjalani pendidikan di kampus hingga diselesaikannya Tugas Akhir ini penulis
persembahkan kepada yang teristimewa yaitu: Ayahanda Darming.F Sitompul dan Ibunda Rosida br.Regar yang merupakan bagian hidup penulis yang senantiasa mendukung dan mendoakan dari sejak penulis lahir hingga sekarang, serta untuk
adik-adik penulis, yang selalu memberikan semangat kepada penulis dalam proses penyelesaian Tugas Akhir ini.
Tugas Akhir ini, penulis banyak menerima bantuan, bimbingan serta dukungan dari berbagai pihak. Pada kesempatan ini penulis ingin menyampaikan terimakasih yang tulus dan sebesar-besarnya kepada:
1. Bapak Ir. Syamsul Amien, M.S sebagai Dosen Pembimbing Tugas Akhir penulis yang
sangat besar bantuannya dalam menyelesaikan Tugas Akhir ini.
2. Bapak Ir. Surya Tarmizi Kasim, M.Si dan Bapak Rachmad Fauzi ST, MT selaku Ketua dan
Sekretaris Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara.
3. Kepada Ayah dan Ibu tercinta yang telah menghantarkan doa, perhatian, semangat
4. Kepada seluruh keluarga penulis yang tak henti memberi dukungan untuk
menyelesaikan Tugas Akhir ini
5. Seluruh staf pengajar yang telah memberi bekal ilmu kepada penulis dan seluruh
pegawai Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara atas segala bantuannya.
6. Bayu, Fernadi, Reki Seuharmon, Indra riskiawan, yoakim, rizky zuliandri, mujahiddin, lamhot'07, anna basriyani S.pdi. M.Si, Andry A. marpaung'10 bambang10, yang selalu menjadi teman penulis selama ini.
7. Seluruh teman-teman mahasiswa/i di Departemen Teknik Elektro, atas dukungan dan
bantuan yang diberikan kepada penulis.
8. Semua pihak yang tidak sempat penulis sebutkan satu per satu.
Penulis menyadari bahwa Tugas Akhir ini masih banyak kekurangannya. Kritik dan saran dari pembaca untuk menyempurnakan Tugas Akhir ini sangat penulis harapkan. Kiranya Tugas Akhir ini dapat bermanfaat bagi kita semua.
Terimakasih.
Medan, Februari 2014 Penulis
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... iv
DAFTAR GAMBAR ... viii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Tujuan Penulisan ... 1
1.3 Batasan Masalah ... 2
1.4 Metode Penulisan ... 2
1.5 Sistematika Penulisan ... 3
BAB II MOTOR ARUS SEARAH ... 4
II.1 Umum ... 4
II.2 Konstruksi Motor Arus Searah ... 4
II.3 Prinsip Kerja Motor Arus Searah ... 8
II.4 Reaksi Jangkar ... 12
II.5 Mengatasi Reaksi Jangkar ... 16
II.5.1 Pergeseran Sikat (Brush Shifting) ... 17
II.5.2 Penambahan Kutub Bantu (Interpole) ... 18
II.5.3 Belitan Kompensasi (Compensating Windings) ... 19
II.6 Jenis-Jenis Motor Arus Searah ... 19
II.6.2 Motor Arus Searah Penguatan Sendiri ... 21
II.6.2.1 Motor Arus Searah Penguatan Seri ... 21
II.6.2.2 Motor Arus Searah Penguatan Shunt ... 22
II.6.2.3 Motor Arus Searah Penguatan Kompon ... 23
II.6.2.3.1 Motor Arus Searah Penguatan Kompon Pendek 24
II.6.2.3.2 Motor Arus Searah Penguatan Kompon Panjang 25
II.7 Gaya Gerak Listrik Lawan Pada Motor Arus Searah ... 27
II.8 Pengaturan Kecepatan Putaran Pada Motor Arus Searah ... 28
II.9 Karakteristik Motor Arus Searah Penguatan Kompon ... 29
II.9.1 Karakteristik Torsi – Arus Jangkar (T/Ia) ... 30
II.9.2 Karakteristik Putaran – Arus Jangkar (n/Ia) ... 31
II.9.3 Karakteristik Torsi – Putaran (T/n) ... 32
II.10 Efisiensi motor arus searah ... 33
II.10.1 Efisiensi mekanis ... 34
II.10.2 Efisiensi elektris ... 35
BAB III METODE PENELITIAN ... 36
III.1 Tempat dan Waktu penelitian ... 36
III.2 Metode pengambilan data ... 36
III.3 Langkah-langkah penelitian ... 37
III.4 Teknik analisa data ... 38
III.5 Peralatan yang digunakan ... 39
III.6 Rangkaian pengujian ... 39
III.6.2 Rangakain pengujian motor DC penguatan kompon pendek dan panjang pada kondisi berbeban dengan penambahan kutub ... 40
III.7 Prosedur pengujian ... 41 III.7.1 Prosedur pengujian motor DC penguatan kompon pendek dan panjang pada kondisi berbeban ... 41
III.7.2 Prosedur pengujian motor DC penguatan kompon pendek dan panjang pada kondisi berbeban dengan penambahan kutub ... 42
BAB IV ANALISA DATA ... 43 IV.1 Data hasil percobaan motor dc kompon pendek tanpa kutub ... 43
IV.1.1 Data hasil percobaan motor dc kompon pendek tanpa kutub 43
IV.1.2 Analisa data pada percobaan motor dc kompon pendek tanpa kutub ... 43
IV.2 Data hasil percobaan motor dc kompon pendek dengan kutub ... 46
IV.2.1 Data hasil percobaan motor dc kompon pendek dengan kutub ... 46 IV.2.2 Analisa data pada percobaan motor dc kompon pendek dengan
kutub ... 47 IV.3 Data hasil percobaan motor dc kompon panjang tanpa kutub ... 49
IV.3.1 Data hasil percobaan motor dc kompon panjang tanpa kutub49 IV.3.2 Analisa data pada percobaan motor dc kompon panjang tanpa kutub ... 50
IV.4 Data hasil percobaan motor dc kompon panjang dengan kutub ... 52
IV.4.1 Data hasil percobaan motor dc kompon panjang dengan kutub .... 52
IV.5 Kurva hasil percobaan ... 55
BAB V KESIMPULAN DAN SARAN ... 58
5.1 Kesimpulan ... 58
5.2 Saran ... 58
DAFTAR GAMBAR
Gambar 2.1 Kontruksi motor arus searah stator ... 5
Gambar 2.2 Kontruksi motor arus searah rotor ... 5
Gambar 2.3 Pengaruh penempatan konduktor berarus dlm medan magnet .. 9
Gambar 2.4 Prinsip perputaran motor arus searah ... 10
Gambar 2.5 Fluksi yang dihasilkan oleh kumparan ... 13
Gambar 2.6 Fluksi yang dihasilkan oleh kumparan jangkar ... 14
Gambar 2.7 Hasil kombinasi antara fluksi medan dan fluksi jangkar ... 14
Gambar 2.8 Kurva pemagnetan saat terjadi reaksi jangkar ... 15
Gambar 2.9 Pelemahan ggm akibat pergeseran bidang netral ... 18
Gambar 2.10 Motor arus searah yang di lengkapi dengan kutub bantu ... 18
Gambar 2.11 Rangkaian ekuivalen motor arus searah penguatan bebas ... 20
Gambar 2.12 Rangkaian ekuivalen motor arus searah penguatan seri ... 21
Gambar 2.13 Rangkaian ekuivalen motor arus searah penguatan shunt ... 22
Gambar 2.14 Rangkaian ekuivalen motor arus searah penguatan kompon pendek kumulatif... 24
Gambar 2.15 Rangkaian ekuivalen motor arus searah penguatan kompon pendek differensial ... 25
Gambar 2.16 Rangkaian ekuivalen motor arus searah penguatan kompon panjang kumulatif... 26
Gambar 2.17 Rangkaian ekuivalen motor arus searah penguatan kompon panjang differensial ... 26
Gambar 2.18 Kurva karakteristik torsi-arus jangkar ... 31
Gambar 2.20 Kurva karakteristik torsi-putaran ... 33
Gambar 3.6.1 Rangkaian pengujian motor DC panjang pada kondisi berbeban tanpa
kutub ... 39
Gambar 3.6.2 Rangkaian pengujian motor DC pendek pada kondisi berbeban tanpa kutub ... 40
Gambar 3.6.3 Rangkaian pengujian motor DC panjang pada kondisi berbeban dengan penambahan kutub ... 40
Gambar 3.6.4 Rangkaian pengujian motor DC pendek pada kondisi berbeban dengan penambahan kutub ... 41
ABSTRAK
Motor listrik merupakan perangkat elekromagnetis yang mengubah energi listrik
menjadi energi mekanik. Motor DC memerlukan tegangan searah pada kumparan medan untuk diubah menjadi energi mekanik. Energi mekanik ini digunakan sebagai penggerak peralatan listrik seperti pompa,penggerak kipas angin, lift dan lain-lain.
Karena penggunaannya yang cukup luas maka kinerjanya harus baik. Kinerja suatu motor DC dikatakan baik jika efisiensi motor tersebut tinggi. Hal itu dapat dicapai
dengan mengatur bagian-bagian tertentu dari motor. Perubahan posisi sikat pada motor DC mempengaruhi efisiensinya.
Dalam tugas akhir ini penulis akan melakukan analisis perbandingan efisiensi
motor DC kompon pendek dengan motor DC kompon panjang akibat penambahan kutub. Dimana efisiensi motor dc kompon panjang lebih efektif dari pada efisiensi
motor dc kompon pendek. Nilai efisiensi tertinggi dari motor dc kompon panjang akibat penambahan kutub adalah 81.92% terhadap torsi beban 0.6 kg. Dan efisiensi tertinggi dari motor dc kompon pendek akibat penambahan kutub adalah 80.16% terhadap torsi
BAB I
PENDAHULUAN
1.1. Latar Belakang
Motor arus searah berfungsi mengubah energi listrik arus searah menjadi energi
mekanis berupa putaran sebuah mesin arus searah dapat digunakan baik sebagai motor arus maupun generator arus searah.
Akhir-akhir ini mungkin banyak orang beranggapan bahwa tidak perlu lagi
mempelajari motor arus searah karena penggunaannya pada industry-industri sudah sangat berkurang. Namun akhirnya beberapa tahun terakhir ini motor arus searah
mengalami perkembangan khususnya dalam pemakaiannya sebagai motor penggerak. Penggunaan motor arus searah dapat kita jumpai pada alat pengangkut disuatu perkembangan, dalam sarana transportasi yaitu pada kereta api listrik dan juga pada
mobil yang disuplai oleh baterai. Pemilihan motor arus searah dibandingkan motor sinkron ataupun motor induksi karena mudah dalam pengaturan putaran baik untuk beban yang bervariasi dan juga system mesin DC sering kali dipergunakan pada
pemakaian yang memerlukan rentang kecepatan motor yang lebar atau pada pengaturan yang teliti pada keluaran motornya.
Penambahan kutub bantu merupakan salah satu cara untuk mengurangi reaksi jangkar yang terjadi. Pada motor arus searah, dimana reaksi jangkar ini dapat menimbulkan pengaruh yang sangat buruk pada motor arus searah terutama terhadang
Dengan demikian, diharapkan motor arus searah memiliki efisiensi yang cukup tinggi. Pada motor arus searah, penambahan kutub bantu selama mengantisipasi reaksi
jangkar ternyata mempengaruhi efisiensinya. Maka dengan menambah kutub bantu pada motor arus searah dapat meningkatkan performasinya, sehingga dapat bekerja lebih baik.
1.2.Tujuan dan Manfaat Penulisan
1. Mengetahui perbandingan efisiensi antar Motor DC kompon pendek akibat penambahan kutub bantudengan Motor DC kompon pendek tanpa penambahan kutub bantu.
2. Mengetahui perbandingan efisiensi antar Motor DC kompon panjang akibat penambahan kutub bantu dengan Motor DC kompon panjang tanpa penambahan kutub bantu.
3. Mencari efisiensi yang lebih baik dari Motor DC kompon pendek dan Motor DC kompon panjang akibat penambahan kutub bantu.
Penulisan tugas akhir dapat mengurangi reaksi jangkar yang terjadi pada motor arus searah DC dan dapat meningkatkanperformasi motor arus searah DC.
1.3.Batasan Masalah
Agar pembahasan tugas akhir ini mendapatkan hasil yang maksimal serta terfokus pada judul dan bidang yang telah disebutkan di atas, maka penulis perlu
1. Motor yang digunakan adalah motor DC kompon pendek dan motor DC kompon panjang
2. Motor DC beroperasi sendiri
3. Tidak memperhitungkan rugi – rugi yang terjadi pada motor DC 4. Beban yang digunakan adalah beban resistif
5. Analisis perhitungan berdasarkan peralatan yang tersedia di Laboratorium Konversi Energi Listrik
1.4. Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan beberapa
metode studi diantaranya :
1. Studi literatur, yaitu dengan membaca teori – teori yang berkaitan dengan topik
tugas akhir ini dari buku – buku referensi baik yang dimiliki oleh penulis atau di perpustakaan dan juga dari artikel - artikel, jurnal, internet dan lain – lain.
2. Penelitian, yaitu dengan melakukan penelitian di Laboratorium Konversi Energi
Listrik Departemen Teknik Elektro FT – USU .
3. Studi bimbingan, yaitu dengan melakukan diskusi tentang topik tugas akhir ini
1.5 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut: ABSTRAK
BAB I PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar belakang masalah, tujuan dan manfaat penulisan, batasan masalah, metode dan sistematika
penulisan.
BAB II MOTOR ARUS SEARAH
Bab ini membahas tentang motor arus searah (motor DC) secara umum,
konstruksi, prinsip kerja, jenis – jenis motor DC dan karakteristik motor DC penguatan kompon.
BAB III METODE PENELITIAN
Bab ini membahas tentang metode pengumpulan data, langkah-langkah penelitian,teknik analisa data, peralatan yang digunakan, rangkaian
pengujian dan prosedur pengujian BAB IV HASIL ANALISA DATA
Bab ini membahas tentang perbandingan efisiensi motor DC kompon pendek dan motor DC kompon panjang akibat penambahan kutub.
BAB V KESIMPULAN DAN SARAN
Bab ini berisi tentang kesimpulan dan saran dari hasil penelitian ataupun
BAB II
MOTOR ARUS SEARAH
2.1. Umum
Motor arus searah adalah mesin yang mengubah energi listrik arus searah
menjadi energi mekanis yang berupa putaran. Pada prinsip pengoperasiannya, motor arus searah sangat identik dengan generator arus searah. Kenyataannya mesin yang
bekerja sebagai generator arus searah akan dapat bekerja sebagai motor arus searah. Oleh sebab itu, sebuah mesin arus searah dapat digunakan baik sebagai motor arus searah maupun generator arus searah.
Berdasarkan fisiknya motor arus searah secara umum terdiri atas bagian yang diam dan bagian yang berputar. Pada bagian yang diam (stator) merupakan tempat
diletakkannya kumparan medan yang berfungsi untuk menghasilkan fluksi magnet sedangkan pada bagian yang berputar (rotor) ditempati oleh rangkaian jangkar seperti kumparan jangkar, komutator dan sikat.
Motor arus searah bekerja berdasarkan prinsip interaksi antara dua fluksi magnetik. Dimana kumparan medan akan menghasilkan fluksi magnet yang arahnya
dari kutub utara menuju kutub selatan dan kumparan jangkar akan menghasilkan fluksi magnet yang melingkar. Interaksi antara kedua fluksi magnet ini menimbulkan suatu gaya. Dimana gaya ini akan menghasilkan momen puntir atau torsi. Apabila torsi start
lebih besar dari torsi beban, maka motor akan berputar.
2.2 Konstruksi Motor Arus Searah
2) Rotor (bagian yang berputar), terdiri dari jangkar, kumparan jangkar dan komutator.
Untuk lebih jelasnya, konstruksi motor arus searah dapat dilihat pada Gambar 2.1 dan Gambar 2.2 di bawah ini :
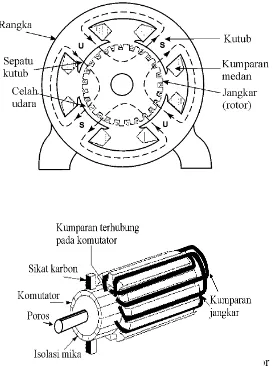
Gambar 2.1 Konstruksi motor arus searah bagian stator
Gambar 2.2 Konstruksi motor arus searah bagian rotor Keterangan dari Gambar 2.1 dan Gambar 2.2 tersebut adalah :
1. Rangka
Rangka motor arus searah adalah tempat meletakkan sebagian besar komponen mesin dan melindungi bagian mesin. Untuk itu rangka harus dirancang memiliki
Rangka juga berfungsi sebagai tempat mengalirkan fluksi magnet yang dihasilkan oleh kutub-kutub medan. Rangka dibuat dengan menggunakan bahan
ferromagnetik yang memiliki permeabilitas tinggi. Rangka biasanya terbuat dari baja tuang (cast steel) atau baja lembaran (rolled steel) yang berfungsi sebagai penopang mekanis dan juga sebagai bagian dari rangkaian magnet.
Pada rangka terdapat papan nama (name plat) yang bertuliskan spesifikasi umum atau data teknik dari motor. Papan nama tersebut untuk mengetahui beberapa hal
pokok yang perlu diketahui dari motor tersebut. 2. Kutub Medan
Kutub medan terdiri atas inti kutub dan sepatu kutub. Sepatu kutub yang
berdekatan dengan celah udara dibuat lebih besar dari badan inti. Adapun fungsi dari sepatu kutub adalah :
a. Sebagai pendukung secara mekanis untuk kumparan medan.
b. Menghasilkan distribusi fluksi yang lebih baik yang tersebar di seluruh jangkar dengan menggunakan permukaan yang melengkung.
Inti kutub terbuat dari lembaran-lembaran besi tuang atau baja tuang yang terisolasi satu sama lain. Kutub medan (inti kutub dan sepatu kutub) direkatkan
bersama-sama kemudian dibuat pada rangka. 3. Sikat
Sikat adalah jembatan bagi aliran arus ke kumparan jangkar. Dimana permukaan
sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik. Sikat memegang peranan penting untuk terjadinya komutasi. Sikat terbuat dari bahan karbon
komutator supaya gesekan yang terjadi antara segmen-segmen komutator dan sikat tidak mengakibatkan ausnya komutator.
4. Kumparan Medan
Kumparan medan adalah susunan konduktor yang dibelitkan pada inti kutub. Dimana konduktor tersebut terbuat dari kawat tembaga yang berbentuk bulat ataupun
persegi. Belitan medan berfungsi untuk menghasilkan fluksi utama yang dibentuk dari kumparan pada setiap kutub.
5. Inti Jangkar
Inti jangkar yang umumnya digunakan dalam motor arus searah adalah berbentuk silinder yang diberi alur-alur pada permukaannya untuk tempat melilitkan
kumparan jangkar tempat terbentuknya ggl induksi. Seperti halnya pada inti kutub magnet, jangkar juga dibuat dari bahan berlapis-lapis tipis untuk mengurangi panas
yang terbentuk karena adanya arus liar (eddy current). Inti jangkar terbuat dari bahan ferromagnetik yaitu sejenis campuran baja silikon.
6. Kumparan Jangkar
Kumparan jangkar pada motor arus searah merupakan tempat dibangkitkannya ggl induksi. Kumparan jangkar ditempatkan di dalam alur-alur inti jangkar. Jenis-jenis
konstruksi kumparan jangkar pada rotor ada tiga macam, yaitu : 1. Kumparan jerat (lap winding)
2. Kumparan gelombang (wave winding)
7. Komutator
Untuk memperoleh tegangan searah diperlukan alat penyearah yang disebut komutator. Komutator terdiri dari sejumlah segmen tembaga yang berbentuk lempengan-lempengan yang dirakit ke dalam silinder yang terpasang pada poros.
Dimana tiap-tiap lempengan komutator terisolasi dengan baik antara satu dengan lainnya. Bahan isolasi yang digunakan pada komutator adalah mika.
Komutator yang digunakan dalam motor arus searah pada prinsipnya mempunyai dua bagian yaitu :
1) Komutator bar, merupakan tempat terjadinya pergesekan antara komutator dengan
sikat-sikat.
2) Komutator riser, merupakan bagian yang menjadi tempat hubungan komutator
dengan ujung dari lilitan jangkar. 8. Celah Udara
Celah udara merupakan ruang atau celah antara permukaan jangkar dengan
permukaan sepatu kutub yang menyebabkan jangkar tidak bergesekan dengan sepatu kutub. Fungsi dari celah udara adalah sebagai tempat mengalirnya fluksi yang
dihasilkan oleh kutub-kutub medan.
2.3 Prinsip Kerja Motor Arus Searah
Motor arus searah mempunyai prinsip kerja berdasarkan percobaan Lorentz
yang menyatakan : “jika sebatang penghantar listrik yang berarus berada di dalam medan magnet maka pada kawat penghantar tersebut akan terbentuk suatu gaya”. Gaya
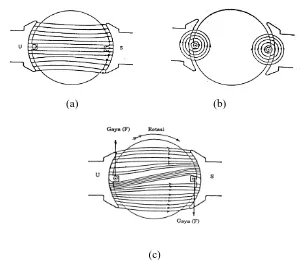
konduktor yang dialiri arus listrik ditempatkan pada suatu medan magnet, maka konduktor akan mengalami gaya mekanik seperti diperlihatkan pada Gambar 2.3
berikut:
(a) (b)
(c)
Gambar 2.3 Pengaruh penempatan konduktor berarus dalam medan magnet Kuat medan magnet yang timbul tergantung pada besarnya arus yang mengalir dalam konduktor, seperti ditunjukkan oleh persamaan (2.1) berikut ini :
H =
I N×
...(2.1)
Dimana :
H = kuat medan magnet (lilitan Ampere/meter) N = banyak kumparan (lilitan)
I = arus yang mengalir pada penghantar (Ampere)
Pada Gambar 2.3(a) menunjukkan sebuah medan magnet seragam yang dihasilkan oleh kutub-kutub magnet utara dan selatan yang arahnya dari kutub utara
menuju kutub selatan. Sedangkan Gambar 2.3(b) menggambarkan sebuah konduktor yang dialiri arus searah dan menghasilkan medan magnet (garis-garis gaya fluksi) disekelilingnya.
Jika konduktor yang dialiri arus tersebut ditempatkan di dalam medan magnet seragam, maka interaksi kedua medan akan menimbulkan medan yang tidak seragam
seperti yang ditunjukkan pada Gambar 2.3 (c). Sehingga kerapatan fluksi akan bertambah besar di atas sebelah kanan konduktor (dekat kutub selatan) dan di bawah sebelah kiri konduktor (dekat kutub utara) sedangkan kerapatan fluksi menjadi
berkurang di atas sebelah kiri konduktor dan di bawah sebelah kanan konduktor.
Kerapatan fluksi yang tidak seragam ini menyebabkan konduktor di sebelah kiri
akan mengalami gaya ke atas, sedangkan konduktor di sebelah kanan akan mengalami gaya ke bawah. Kedua gaya tersebut akan menghasilkan torsi yang akan memutar jangkar dengan arah putaran searah dengan putaran jarum jam. Prinsip ini lah yang
menjadi dasar dari prinsip kerja sebuah motor arus searah.
Untuk lebih jelasnya, prinsip kerja sebuah motor arus searah dapat dijelaskan
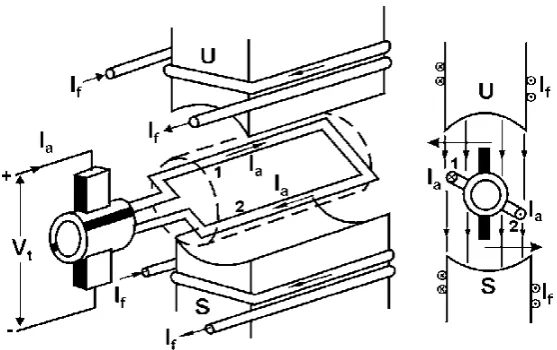
Gambar 2.4 Prinsip perputaran motor arus searah
Berdasarkan Gambar 2.4 di atas, kedua kutub stator dibelitkan dengan konduktor-
konduktor sehingga membentuk kumparan yang dinamakan kumparan stator atau kumparan medan. Kumparan medan tersebut dihubungkan dengan suatu sumber
tegangan, maka pada kumparan medan itu akan mengalir arus medan (If). Kumparan medan yang dialiri arus ini akan menimbulkan fluksi utama yang dinamakan fluksi stator. Fluksi ini merupakan medan magnet yang arahnya dari kutub utara menuju kutub
selatan (hal ini dapat dilihat dengan adanya garis-garis fluksi). Apabila pada kumparan jangkar mengalir arus yakni arus jangkar, berdasarkan hukum Lorentz kita ketahui
bahwa apabila sebuah konduktor yang dialiri arus ditempatkan pada sebuah medan magnet maka pada konduktor tersebut akan timbul gaya (F), maka demikian pula halnya pada kumparan jangkar. Besarnya gaya ini bergantung dari besarnya arus yang mengalir
pada kumparan jangkar (I), kerapatan fluksi (B) dari kedua kutub dan panjang
konduktor jangkar (). Semakin besar fluksi yang terimbas pada kumparan jangkar maka arus yang mengalir pada kumparan jangkar juga besar, dengan demikian gaya
Jika arus jangkar (I) tegak lurus dengan arah induksi magnetik (B), maka besar
gaya (F) yang dihasilkan oleh arus yang mengalir pada konduktor jangkar sepanjang yang ditempatkan dalam suatu medan magnet dapat ditunjukkan oleh persamaan (2.2) :
F = B . I . ...……...………...………(2.2)
Dimana :
F = gaya Lorentz (Newton)
I = arus yang mengalir pada konduktor jangkar (Ampere) B = kerapatan fluksi (Weber/meter2)
= panjang konduktor jangkar (meter)
Maka besar gaya keseluruhan yang ditimbulkan oleh jumlah total konduktor jangkar ditunjukkan oleh persamaan (2.3) :
F=Z .B .I ....………...……(2.3)
Dimana :
Z = jumlah total konduktor jangkar
Gaya yang terjadi pada kumparan jangkar di atas akan menghasilkan torsi yang
besarnya ditunjukkan oleh persamaan (2.4) :
Ta =F .r ...………...…(2.4)
Jika persamaan (2.3) disubstitusikan ke persamaan (2.4), maka akan menghasilkan
persamaan (2.5) :
Ta =Z .B .I . .r ...……...(2.5) Dimana :
r = jari-jari rotor (meter)
Apabila torsi start lebih besar dari torsi beban, maka jangkar akan berputar.
2.4 Reaksi Jangkar
Reaksi jangkar merupakan pengaruh medan magnet yang disebabkan oleh mengalirnya arus pada jangkar, dimana jangkar tersebut berada di dalam medan magnet.
Reaksi jangkar menyebabkan terjadinya dua hal, yaitu :
1. Demagnetisasi atau penurunan kerapatan fluksi medan utama.
2. Magnetisasi silang.
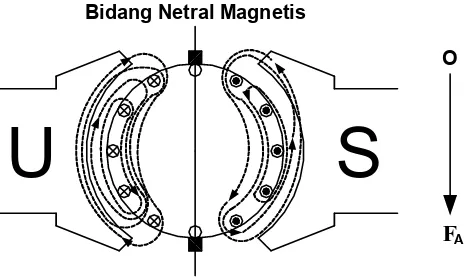
Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar tidak dialiri oleh arus, maka dengan mengabaikan pengaruh celah udara, jalur fluksi ideal untuk
kutub utama dari motor arus searah dua kutub, berasal dari kutub utara menuju kutub selatan seperti pada Gambar 2.5 berikut ini :
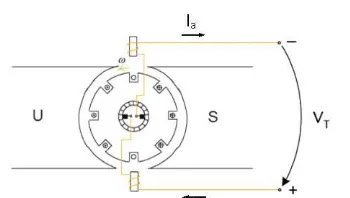
U
S
O M
Bidang Netral Magnetis
Sikat
F
Gambar 2.5 Fluksi yang dihasilkan oleh kumparan medan Dari Gambar 2.5 dapat dijelaskan bahwa :
1. Fluksi didistribusikan simetris terhadap bidang netral magnetis.
2. Sikat ditempatkan bertepatan dengan bidang netral magnetis.
Bidang netral magnetis didefinisikan sebagai bidang di dalam motor dimana
(ggl) induksi konduktor pada bidang tersebut adalah nol. Seperti yang terlihat dari
Gambar 2.5 sikat selalu ditempatkan di sepanjang bidang netral magnetis. Oleh karena
itu, bidang netral magnetis juga disebut sebagai sumbu komutasi karena pembalikan
arah arus jangkar berada pada bidang tersebut. Vektor OFM mewakili besar dan arah dari
fluksi medan utama, dimana vektor ini tegak lurus terhadap bidang netral magnetis.
Sewaktu hanya konduktor jangkar saja yang dialiri oleh arus listrik sementara
kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar timbul garis
gaya magnet atau fluksi. Gambaran arah garis gaya magnet ditunjukkan pada Gambar
2.6 berikut ini :
U
S
Bidang Netral Magnetis
O
A
F
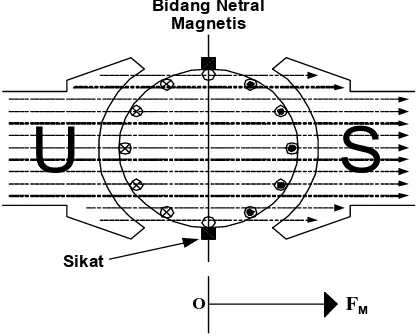
Gambar 2.6 Fluksi yang dihasilkan oleh kumparan jangkar
Penentuan arah dari garis gaya magnet yang diakibatkan oleh arus jangkar
ditentukan dengan aturan putaran sekrup (cork screw rule). Besar dan arah garis gaya magnet tersebut diwakili oleh vektor OFA yang sejajar dengan bidang netral magnetis.
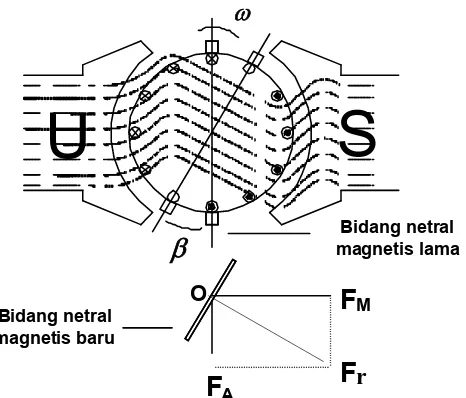
Pada prakteknya, sewaktu mesin beroperasi maka konduktor jangkar dan konduktor medan sama- sama dialiri oleh arus listrik, distribusi fluksi resultan diperoleh dari menggabungkan kedua fluksi tersebut. Oleh karena itu distribusi fluksi medan utama
U
S
β
magnetis lamaBidang netralBidang netral
magnetis baru
ω
F
AF
M OF
rGambar 2.7 Hasil kombinasi antara fluksi medan dan fluksi jangkar
Fluksi yang dihasilkan oleh garis gaya magnet jangkar menentang fluksi medan utama pada setengah bagian dari salah satu kutubnya dan memperkuat fluksi medan utama pada setengah bagian yang lain. Hal ini jelas akan menyebabkan penurunan
kerapatan fluksi pada setengah bagian dari salah satu kutubnya dan terjadi kenaikan pada setengah bagian yang lain di kutub yang sama. Efek dari intensitas medan magnet
atau lintasan fluksi pada jangkar yang memotong lintasan fluksi medan utama ini disebut sebagai reaksi jangkar magnetisasi silang (cross magnetization).
Magnetisasi-silang ini juga menyebabkan pergeseran bidang netral. Pada
Gambar 2.7 dapat dilihat bahwa vektor OFr merupakan resultan vektor OFA dan OFM,
serta posisi bidang netral magnetis yang baru, di mana selalu tegak lurus terhadap
vektor OFr. Bidang netral magnetis motor yang baru bergeser sejauh β karena posisi
bidang netral magnetis ini selalu tegak lurus terhadap vektor OF. Dengan pergeseran
bidang netral ini maka sikat juga akan bergeser sejauh pergeseran bidang netral
Kebanyakan mesin listrik bekerja pada kerapatan fluksi yang dekat dengan titik
jenuhnya, sehingga dapat menimbulkan kejenuhan magnetik. Pengaruh kejenuhan
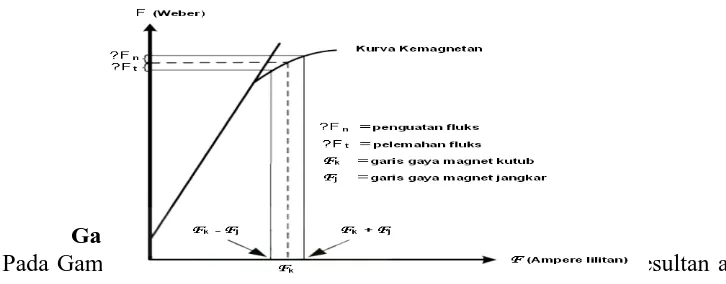
magnetik terhadap fluksi medan utama dapat dijelaskan dengan Gambar 2.8 berikut ini :
Gambar 2.8 Kurva pemagnetan saat terjadi reaksi jangkar
Pada Gambar 2.8 dapat dilihat bahwa garis gaya magnet (ggm) resultan adalah
Fk – Fj dimana Fk adalah ggm medan utama tanpa dipengaruhi reaksi jangkar dan Fj
adalah ggm pada jangkar. Untuk Fj positif dan Fj negatif dimisalkan dengan adanya
pertambahan dan atau pengurangan ggm yang terjadi pada kutub medan sebesar Fk. Untuk lokasi di permukaan kutub dimana ggm rotor menambahkan ggm kutub,
terjadi sedikit penambahan kerapatan fluks ∆Фn. Tetapi pada lokasi permukaan kutub dimana ggm rotor mengeliminir ggm kutub, terdapat penurunan kerapatan fluksi ∆Фt yang lebih besar : ∆Фn < ∆Фt , sehingga penjumlahan rata-rata kerapatan fluks yang
terjadi adalah kerapatan fluks kutub yang semakin berkurang. Hal ini disebut juga efek demagnetisasi reaksi jangkar yang timbul karena adanya saturasi magnetik.
Pelemahan fluks ini menimbulkan efek yang sangat serius pada motor arus searah, dimana pelemahan fluks akan menyebabkan motor arus searah semakin cepat hingga tak terkendali.
2.5 Mengatasi Reaksi Jangkar
Sebagaimana telah diketahui bahwa reaksi jangkar dapat menimbulkan pengaruh
searah tersebut. Hal ini jelas tidak diinginkan. Oleh sebab itu, harus dilakukan tindakan yang sesuai terhadap motor arus searah agar pengaruh reaksi jangkar tersebut dapat
dikurangi.
Ada tiga cara yang dapat dilakukan untuk mengurangi reaksi jangkar yang terjadi pada motor arus searah, yaitu:
1. Pergeseran sikat (brush shifting)
2. Kutub-kutub komutasi (comutating poles/interpoles)
3. Belitan kompensasi (compensating windings) 2.5.1 Pergeseran Sikat (Brush Shifting)
Ide dasarnya adalah dengan memindahkan sikat seirama dengan perpindahan
bidang netral untuk menghindari percikan bunga api yang timbul. Namun dalam penerapannya hal ini cukup sulit karena jarak perpindahan bidang netralnya sangat
ditentukan oleh besarnya beban yang dipikul, maka jarak perpindahan bidang netralnya pun berpindah, sehingga sikat juga harus diubah setiap saat, seirama dengan perubahan jarak perpindahan bidang netral. Selain itu pergeseran sikat akan memperburuk
melemahnya fluks akibat reaksi jangkar mesin, selain dengan metode ini mesin arus searah tidak dimungkinkan untuk bekerja sebagai generator (akan menimbulkan
percikan api yang lebih besar), dan sangat tidak ekonomis terutama untuk mesin-mesin berukuran kecil.
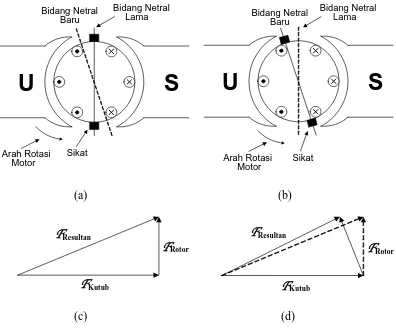
Adapun efek diperburuknya fluks akibat reaksi jangkar dapat dilihat pada
Gambar 2.9. Pada Gambar 2.9(a) diperlihatkan kondisi ketika bidang netral mesin bergeser dan sikat mesin masih tetap pada posisi semula. Ggm resultan yang terbentuk
tersebut, ggm resultannya melemah sedemikian rupa. Hal tersebut dapat dilihat pada Gambar 2.9(d).
U
S
Bidang Netral Lama Bidang Netral
Baru
Sikat Arah Rotasi
Motor
U
S
Bidang Netral Lama Bidang Netral
Baru
Sikat Arah Rotasi
Motor
(a) (b)
F
KutubF
RotorF
ResultanF
ResultanF
RotorF
Kutub [image:31.595.115.511.180.508.2](c) (d)
Gambar 2.9 Pelemahan ggm akibat pergeseran bidang netral
2.5.2 Penambahan Kutub Bantu (Interpole)
Ide dasar penambahan kutub bantu (interpole) yaitu jika tegangan pada kawat-kawat yang sedang melakukan proses komutasi penyearahan dibuat nol, maka tidak
akan terdapat percikan bunga api pada sikat-sikat motor arus searah tersebut. Untuk itu, kutub-kutub kecil yang disebut kutub komutasi ditempatkan di tengah-tengah di antara kutub-kutub utama seperti pada Gambar 2.10. Interpole ini dihubungkan seri terhadap
atau mengurangi adanya tegangan yang muncul pada kawat-kawat yang sedang melakukan proses komutasi.
Ketika beban yang dipikul motor meningkat dan arus jangkar juga meningkat, besarnya perubahan atau pergeseran bidang netral meningkat pula. Hal tersebut akan menyebabkan timbulnya tegangan pada konduktor-konduktor yang sedang melakukan
komutasi. Pada saat itu fluks interpole juga meningkat, menghasilkan tegangan pada konduktor-konduktor tersebut dan berlawanan dengan tegangan yang timbul akibat
[image:32.595.232.407.383.482.2]pergeseran bidang netral.
Gambar 2.10 Motor arus searah yang dilengkapi dengan kutub bantu 2.5.3 Belitan Kompensasi (Compensating Windings)
Belitan kompensasi ini dihubungkan seri terhadap kumparan rotor, belitan ini
bertujuan untuk mengurangi penyimpangan yang timbul akibat reaksi jangkar. Fluks
yang ditimbulkan oleh reaksi jangkar diimbangi oleh fluks yang ditimbulkan oleh
belitan kompensasi yang besarnya sama dan berlawanan. Ketika beban berubah, maka
reaksi jangkar yang berubah akan selalu diimbangi oleh fluks belitan kompensasi,
sehingga bidang netralnya tidak bergeser.
Teknik ini memiliki kelemahan yaitu harganya mahal, dan juga masih
kompensasi. Oleh sebab itu teknik ini digunakan untuk motor-motor yang bekerja ekstra
berat, dimana pelemahan fluks akan menjadi masalah yang serius.
2.6 Jenis – Jenis Motor Arus Searah
Berdasarkan sumber tegangan penguatannya, motor arus searah dapat dibagi
menjadi dua, yaitu :
1. Motor arus searah penguatan bebas 2. Motor arus searah penguatan sendiri
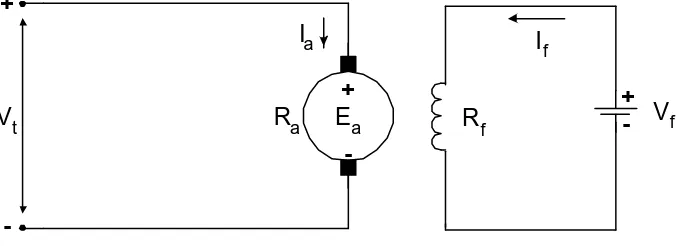
2.6.1 Motor Arus Searah Penguatan Bebas
Motor arus searah penguatan bebas adalah motor arus searah yang sumber tegangan penguatannya berasal dari luar motor. Pada motor ini, kumparan medan tidak terhubung dengan kumparan jangkar. Masing-masing kumparan tersebut disuplai
dengan sumber tegangan DC tersendiri. Rangkaian ekivalen motor arus searah penguatan bebas dapat dilihat pada Gambar 2.11 di bawah ini :
+
-Ea
Ra Vf
Vt
Ia I
f
+
-Rf +
-Gambar 2.11 Rangkaian ekivalen motor arus searah penguatan bebas
Berdasarkan hukum Kirchoff tentang tegangan, dari Gambar 2.11 diperoleh
persamaan tegangan terminal motor seperti persamaan (2.6) :
[image:33.595.143.482.501.624.2]Dari Gambar 2.11 diperoleh juga persamaan tegangan terminal penguat medan dari motor tersebut seperti ditunjukkan oleh persamaan (2.7) :
Vf = If . Rf………...……….……….…...(2.7) Dimana:
Vt = tegangan terminal jangkar motor arus searah (Volt) Ra = tahanan jangkar (Ohm)
If = arus medan penguatan bebas (Ampere)
Vf = tegangan terminal medan penguatan bebas (Volt) Rf = tahanan medan penguatan bebas (Ohm)
Ea = gaya gerak listrik motor arus searah (Volt) Vsikat = jatuh tegangan pada sikat (Volt)
Umumnya jatuh tegangan pada sikat relatif kecil sehingga besarnya dapat diabaikan,
maka untuk rumus selanjutnya Vsikat ini diabaikan.
2.6.2 Motor Arus Searah Penguatan Sendiri
Motor arus searah penguatan sendiri adalah motor arus searah yang sumber tegangan penguatannya berasal dari motor itu sendiri. Dimana kumparan medan
berhubungan langsung dengan kumparan jangkar. Kumparan medan dapat dihubungkan secara seri maupun paralel dengan kumparan jangkar dan dapat juga dihubungkan
dengan keduanya, yaitu secara seri dan paralel, tergantung pada jenis penguatan yang diberikan terhadap motor.
Berdasarkan hubungan kumparan medan dengan kumparan jangkarnya, motor
arus searah penguatan sendiri dapat diklasifikasikan sebagai berikut : 1. Motor arus searah penguatan seri
3. Motor arus searah penguatan kompon
2.6.2.1 Motor Arus Searah Penguatan Seri
Rangkaian ekivalen motor arus searah penguatan seri ditunjukkan pada Gambar
2.12 di bawah ini :
Rs
Vt
+
-Ea
Ra
Ia
IL
+
[image:35.595.208.421.239.393.2]
-IS
Gambar 2.12 Rangkaian ekivalen motor arus searah penguatan seri
Pada motor arus searah penguatan seri, kumparan medan dihubungkan secara seri dengan rangkaian jangkar. Oleh sebab itu arus yang mengalir pada kumparan medan seri sama dengan arus yang mengalir pada kumparan jangkar.
Dari Gambar 2.12 diperoleh persamaan tegangan terminal motor seperti ditunjukkan oleh persamaan (2.8) :
Vt = Ea + Is.Rs + Ia. Ra………..………...(2.8) Karena IL = Ia = Is
Maka persamaan (2.8) dapat juga ditulis seperti persamaan (2.9) :
Vt = Ea + Ia (Ra + Rs) ………....(2.9)
Dimana :
IL = arus dari jala-jala (Ampere)
2.6.2.2 Motor Arus Searah Penguatan Shunt
[image:36.595.222.439.246.374.2]Rangkaian ekivalen motor arus searah penguatan shunt ditunjukkan pada Gambar 2.13 di bawah ini :
+
-V
t E
a
R
a
Ia IL
+
-Rsh I
sh
Gambar 2.13 Rangkaian ekivalen motor arus searah penguatan shunt Pada motor arus searah penguatan shunt, kumparan jangkar dihubungkan langsung pada terminal sehingga paralel dengan kumparan jangkar.
Dari Gambar 2.13 diperoleh persamaan tegangan terminal motor seperti ditunjukkan oleh persamaan (2.10) :
Vt = Ea + Ia.Ra ………….……….…...(2.10)
Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh persamaan
(2.11) dan persamaan (2.12) :
sh I =
sh t R
V
……….………(2.11)
IL = Ia + Ish ………...(2.12)
Dimana :
2.6.2.3 Motor Arus Searah Penguatan Kompon
Motor arus searah penguatan kompon merupakan gabungan motor arus searah penguatan seri dan motor arus searah penguatan shunt. Motor arus searah penguatan kompon dapat diklasifikasikan sebagai berikut :
1. Motor arus searah penguatan kompon pendek
• Motor arus searah penguatan kompon pendek kumulatif (bantu) • Motor arus searah penguatan kompon pendek differensial (lawan)
2. Motor arus searah penguatan kompon panjang
• Motor arus searah penguatan kompon panjang kumulatif (bantu)
• Motor arus searah penguatan kompon panjang differensial (lawan)
2.6.2.3.1 Motor Arus Searah Penguatan Kompon Pendek
Pada motor arus searah penguatan kompon pendek, kumparan medan serinya terhubung secara paralel terhadap kumparan jangkar dan kumparan medan shunt. Motor arus searah penguatan kompon pendek terbagi menjadi dua jenis, yaitu kompon pendek
kumulatif (bantu) dan kompon pendek differensial (lawan).
Pada motor arus searah penguatan kompon pendek kumulatif, polaritas kedua
kumparan medannya sama. Hal ini disebabkan karena kedua arus medannya sama-sama memasuki dot. Maka sesuai dengan aturan dot, fluksi yang dihasilkan menjadi saling menguatkan. Sedangkan pada motor arus searah penguatan kompon pendek differensial,
polaritas kedua kumparan medannya saling berlawanan. Salah satu arus medannya memasuki dot sedangkan yang lainnya meninggalkan dot sehingga fluksi yang
Rangkaian ekivalen motor arus searah penguatan kompon pendek kumulatif dan motor arus searah penguatan kompon pendek differensial ditunjukkan oleh Gambar 2.14
dan Gambar 2.15 berikut ini :
+
-Vt E
[image:38.595.195.428.182.326.2]a Ra Ia IL + -Rsh Ish Is Rs
Gambar 2.14 Rangkaian ekivalen motor arus searah penguatan kompon pendek kumulatif (bantu)
+
-Vt E
a Ra Ia IL + -Rsh Ish Is Rs
Gambar 2.15 Rangkaian ekivalen motor arus searah penguatan kompon pendek differensial (lawan)
Dari Gambar 2.14 dan Gambar 2.15 diperoleh persamaan tegangan terminal motor arus searah penguatan kompon pendek seperti ditunjukkan oleh persamaan (2.13)
:
Vt = Ea + Is.Rs + Ia. Ra...(2.13) Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh persamaan
[image:38.595.195.428.388.540.2]IL = Is = Ia + Ish...(2.14)
2.6.2.3.2 Motor Arus Searah Penguatan Kompon Panjang
Pada motor arus searah penguatan kompon panjang, kumparan medan serinya
terhubung secara seri terhadap kumparan jangkarnya dan terhubung paralel terhadap kumparan medan shunt. Sama halnya seperti motor arus searah penguatan kompon
pendek, motor arus searah penguatan kompon panjang juga terbagi dua, yaitu kompon panjang kumulatif (bantu) dan kompon panjang differensial (lawan).
Pada motor arus searah penguatan kompon panjang kumulatif, polaritas kedua
kumparan medannya sama sehingga fluksi yang dihasilkan saling menguatkan. Sedangkan pada motor arus searah penguatan kompon panjang differensial, polaritas
kedua kumparan medannya saling berlawanan sehingga fluksi yang dihasilkan menjadi saling mengurangi.
Rangkaian ekivalen motor arus searah penguatan kompon panjang kumulatif dan
motor arus searah penguatan kompon panjang differensial ditunjukkan oleh Gambar 2.16 dan Gambar 2.17 berikut ini :
+
-Vt E
a
Ra Ia IL
+
-Rsh
Ish Is
[image:39.595.199.433.568.710.2]Rs
+
-Vt E
a
Ra Ia IL
+
-Rsh
Ish Is
[image:40.595.200.431.99.243.2]Rs
Gambar 2.17 Rangkaian ekivalen motor arus searah penguatan kompon panjang differensial (lawan)
Dari Gambar 2.16 dan Gambar 2.17 diperoleh persamaan tegangan terminal
motor arus searah penguatan kompon panjang seperti ditunjukkan oleh persamaan (2.15) :
Vt = Ea + Is.Rs + Ia.Ra...(2.15)
Karena Is = Ia
Maka persamaan (2.15) dapat juga ditulis seperti persamaan (2.16) :
Vt = Ea + Ia (Rs + Ra) ...(2.16)
Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh persamaan
(2.17) dan persamaan (2.18) :
IL = Ia + Ish...(2.17)
I = sh sh
t R
V
……….………(2.18)
Ketika jangkar motor arus searah berputar di bawah pengaruh torsi penggerak, konduktor jangkar juga berputar di dalam medan magnet dan akan menghasilkan
tegangan induksi di dalamnya seperti halnya pada generator. Sesuai dengan hukum Faraday, akibat gerakan konduktor di dalam suatu medan magnetik maka pada konduktor tersebut akan timbul gaya gerak listrik (ggl) induksi yang diinduksikan pada
konduktor tersebut. Sesuai dengan hukum Lentz, arah ggl induksi tersebut berlawanan dengan tegangan yang diberikan pada motor dan dikenal sebagai ggl lawan atau ggl
balik Ea.
Besarnya tegangan yang diinduksikan tersebut sesuai dengan persamaan (2.19) :
Ea = a P
. 60
Z
. n .Ф...(2.19)
Karena 60 . a Z . P
bernilai konstan, maka dapat dianggap sebagai suatu konstanta K
sehingga persamaan (2.19) dapat juga ditulis seperti persamaan (2.20) :
Ea = K . n . Ф...(2.20) Dimana :
Ea = gaya gerak listrik lawan motor arus searah (Volt) K = konstanta (bergantung pada ukuran fisik motor) n = kecepatan putaran jangkar (rotasi per menit)
Φ = fluksi setiap kutub (Weber) P = jumlah kutub
Z = jumlah total konduktor jangkar a = jumlah kumparan tersambung paralel
2.8 Pengaturan Kecepatan Putaran Pada Motor Arus Searah
Sebagaimana telah diketahui bahwa di dalam motor arus searah berlaku persamaan (2.21) :
Dimana Ea = a 60 n Z Φ P Sehingga a 60 n Z Φ P
= Vt – IaRa
Karena a 60 Z P = K
Maka K n Ф = Vt – IaRa Sehingga diperoleh persamaan (2.22) :
n =
(
)
Φ
K R I Vt − a a
...(2.22)
Karena K bernilai konstan, maka persamaan (2.22) dapat juga ditulis seperti persamaan (2.23) :
n ~
(
)
Φ
R I Vt − a a
...(2.23)
Dari persamaan (2.23) di atas dapat dilihat bahwa kecepatan (n) berbanding lurus dengan tegangan terminal motor (Vt), arus jangkar (Ia) dan tahanan jangkar (Ra) serta berbanding terbalik dengan fluks per kutub (Φ). Dengan demikian, kecepatan putaran motor arus searah dapat diatur dengan cara mengubah :
1. Tegangan terminal (Vt) 2. Tahanan jangkar (Ra) 3. Fluks Magnetik (Φ)
2.9 Karakteristik Motor Arus Searah Penguatan Kompon
Karakteristik dari suatu motor harus diketahui, karena karakteristik dari suatu
penguatan shunt hanya memiliki satu komponen medan. Sedangkan untuk motor arus searah penguatan kompon memiliki dua kumparan medan yakni kumparan medan shunt
dan kumparan medan seri.
Pada motor arus searah penguatan kompon panjang dan motor arus searah penguatan kompon pendek terdapat tiga karakteristik, yaitu :
1. Karakteristik torsi – arus jangkar (T/Ia) 2. Karakteristik putaran – arus jangkar (n/Ia)
3. Karakteristik torsi – putaran (T/n)
2.9.1 Karakteristik Torsi – Arus Jangkar (T/Ia)
Pada motor arus searah penguatan kompon berlaku persamaan (2.24) : T = K . Фm . Ia...(2.24)
Dimana Фm = Фsh + Фs
Sehingga persamaan (2.24) dapat juga ditulis seperti persamaan (2.25) :
T = K . (Фsh + Фs) . Ia...(2.25) Dimana :
T = torsi jangkar (Newton-meter)
Фsh = fluksi pada kumparan medan shunt (Weber)
Фs = fluksi pada kumparan medan seri (Weber)
Dari persamaan (2.24) dapat dilihat bahwa dengan pertambahan arus jangkar (Ia) maka fluks magnetik (Фm) juga akan bertambah sehingga menyebabkan torsi (T)
meningkat. Pada motor arus searah penguatan kompon panjang, fluksi medan shunt lebih besar dibandingkan medan seri maka bentuk kurva karakteristik torsi – arus
shunt maka bentuk kurva karakteristik torsi – arus jangkar (T/Ia) seperti kurva 2 pada Gambar 2.18. Untuk lebih jelasnya, bentuk kurva karakteristik torsi – arus jangkar
dapat dilihat pada Gambar 2.18 berikut :
[image:44.595.186.435.180.392.2]r
Gambar 2.18 Kurva karakteristik torsi – arus jangkar (T/Ia) 2.9.2. Karakteristik Putaran – Arus Jangkar (n/Ia)
Sebagaimana telah diketahui bahwa kecepatan putaran motor arus searah sesuai dengan persamaan (2.23) sehingga diperoleh persamaan (2.26) :
n ~
Φ
Ea
...(2.26)
Pada motor arus searah penguatan kompon panjang, fluks magnetik (Φ) dan GGL lawan
(Ea) hampir konstan di bawah kondisi normal. Dengan demikian, kecepatan putaran motor (n) hampir selalu konstan walaupun arus jangkar (Ia) berubah-ubah nilainya. Ketika beban bertambah, GGL lawan dan fluks magnetik berkurang akibat drop
tegangan pada tahanan jangkar (Ra). Dalam hal ini, GGL lawan berkurang lebih sedikit dibandingkan fluks magnetik. Dengan demikian, kecepatan putaran motor juga menurun
dengan pertambahan beban seperti ditunjukkan oleh kurva 1 pada Gambar 2.19. Untuk lebih jelasnya, bentuk kurva karakteristik putaran – arus jangkar (n/Ia) dapat dilihat pada
Gambar 2.19 berikut :
Gambar 2.19 Kurva karakteristik putaran – arus jangkar (n/Ia)
2.9.3. Karakteristik Torsi – Putaran (T/n)
Karakteristik torsi – putaran (T/n) disebut juga karakteristik mekanik. Dari
persamaan (2.24) dapat dilihat bahwa jika torsi (T) bertambah, maka nilai (Ia) bertambah, sedangkan fluks magnetik (Фm) tetap. Dengan bertambahnya torsi (T), maka kecepatan putaran (n) akan menurun. Untuk motor arus searah penguatan kompon
panjang, bentuk kurva karakteristik torsi – putaran (T/n) ini mendekati ke motor shunt seperti kurva 1 pada Gambar 2.20. Sedangkan untuk motor arus searah penguatan
1
[image:46.595.191.431.99.314.2]2
Gambar 2.20 Kurva karakteristik torsi – putaran (T/n)
2.10. Efisiensi Motor Arus Searah
Efisiensi motor arus searah merupakan perbandingan antara daya keluaran dengan daya masukan yang dinyatakan dalam persen (%) dari motor arus searah
tersebut. Daya masukan yang diterima oleh motor arus searah berupa daya listrik sedangkan daya keluaran yang dihasilkannya berupa daya mekanik yaitu gerak rotor
dan hasil selisih antara daya masukan dengan daya keluaran motor disebut rugi-rugi. Dengan demikian, efisiensi suatu motor arus searah diperoleh dengan menggunakan persamaan (2.10.1) :
η = x 100% P
P in out
…...………...(2.10.1)
Karena Pout = Pin – Σ Rugi-Rugi dan Pin = Pout + Σ Rugi-Rugi
η =
in in
P
Rugi Rugi
P −
∑
−x 100 %...(2.10.2)
η =
∑
−+ Rugi Rugi
P
P out
out
x 100 %...(2.10.3)
Dimana :
η = efisiensi motor arus searah (%)
Pin = daya masukan motor arus searah (Watt)
Pout = daya keluaran motor arus searah (Watt)
Efisiensi yang dinyatakan oleh persamaan (2.10.1) disebut juga sebagai efisiensi
komersial atau efisiensi keseluruhan (overall efficiency). Selain itu, dalam motor arus searah dikenal juga dua macam efisiensi lainnya, yaitu :
2.10.1 Efisiensi Mekanis
Efisiensi mekanis pada motor arus searah dapat diperoleh dengan menggunakan
persamaan (2.10.4) :
ηm = x 100% P
P a out
………....…...…...(2.10.4)
Dimana :
Pout = daya keluaran motor arus searah = Tsh x ω (Watt)
Pa = daya yang dibangkitkan pada kumparan jangkar = Ea x Ia (Watt) Tsh = torsi poros dari motor arus searah (Newton-meter)
2.10.2 Efisiensi Elektris
Efisiensi elektris atau efisiensi listrik pada motor arus searah dapat diperoleh
dengan menggunakan persamaan (2.10.5) :
ηe = in
a P P
x 100 %...(2.10.5)
Dimana :
Pin = Vt x IL (Watt)
Vt = tegangan terminal motor arus searah (Volt) IL = arus jala-jala (Ampere)
Dari persamaan (2.10.4) dan persamaan (2.10.5) diperoleh hubungan antara efisiensi mekanis dengan efisiensi elektris yaitu seperti persamaan (2.10.6) :
η = ηm x ηe……….…..………...…(2.10.6)
Metode yang paling mudah dalam menentukan efisiensi motor arus searah adalah membebaninya langsung dan mengukur daya masukan dan keluarannya. Maka
kita dapat menggunakan persamaan (2.10.1) untuk menentukan efisiensi motor tersebut. Namun, metode ini harus memperhatikan tiga hal utama yaitu metode ini membutuhkan
pembebanan pada motor. Kedua, untuk motor-motor dengan rating daya yang besar, beban-beban yang diperlukan tidak mungkin diperoleh. Ketiga, bahan lebih mustahil untuk memberikan beban yang sedemikian rupa, karena daya yang besar akan terbuang
menjadikan metode ini sangat mahal.
Metode yang paling umum untuk mendapatkan efisiensi motor arus searah
adalah menentukan rugi-ruginya dari pengukuran daya masukan dan keluarannya pada saat berbeban. Kita dapat menggunakan persamaan (2.10.2) untuk menentukan efisiensi motor tersebut. Metode ini memiliki keuntungan yang nyata karena lebih mudah dan
BAB III
METODE PENELITIAN
3.1. Tempat dan Waktu Penelitian
Pengambilan data dalam penelitian tugas Akhir ini dilakukan di Laboratorium
Konversi Energi Listrik FT-USU, pada tanggal 07 Februari pukul 16.00 s/d 22.30 WIB.
3.2 Metode Pengumpulan Data
Metode pengumpulan data dalam suatu penelitian akan sangat menentukan
keberhasilan penelitian, oleh karena itu perlu direncanakan dengan tepat dalam memilih metode untuk pengumpulan data. Sedangkan metode-metode tersebut adalah sebagai berikut :
1. Metode Dokumentasi
Yang dimaksud metode dokumentasi adalah cara memperoleh data melalui
hal-hal atau variabel yang berupa catatan, transkrip, buku, surat kabar, majalah dan lain-lain. Adapun dokumentasi yang akan peneliti gunakan adalah data-data yang berhubungan dengan arus, dan tegangan.
2. Metode Observasi
Pengumpulan data dengan observasi langsung atau dengan pengamatan langsung
adalah cara pengambilan data ke tempat penelitian. Dalam hal ini penulis langsung berada di lokasi penelitian yaitu di Laboratorium Konversi Energi Listrik dan mengadakan penelitian mengenai hal-hal yang perlu dicatat sebagai data dalam
3.3 Langkah- Langkah Penelitian
Langkah-langkah penelitian yang ditempuh dalam penelitian ini meliputi :
1. Tahap Persiapan
Tujuan dari tahap persiapan penelitian adalah untuk mengkoordinasikan agar saat penelitian dapat berjalan dengan lancar. Langkah-langkah yang dilakukan adalah
sebagai berikut :
a) Mempersiapkan alat dan bahan untuk penelitian, semua alat dan bahan yang
akan digunakan harus dipersiapkan terlebih dahulu. b) Mengkondisikan obyek penelitian.
Obyek penelitian yang dimaksudkan disini adalah Motor DC kompon
pendek dan motor DC kompon panjang, dan penambahan kutub. Adapun langkah mengkondisikan obyek penelitian ini meliputi:
1) Memastikan bahwa motor DC kompon pendek dan motor DC kompon panjang dapat beroperasi.
2) Membandingkan akibat penambahan kutub dengan tidak ditambahkan kutub
dengan benar.
c) Mengkondisikan alat ukur.
Alat ukur sebagai alat pengambil data harus memiliki validitas yang baik. Untuk mendapatkan validitas yang baik alat ukur harus disetting sesuai dengan keadaan seperti skala operasi.
2. Tahap Pengambilan Data
Tujuan dari tahap ini untuk memperoleh data penelitian akibat penambahan kutub pada
3.4 Teknik Analisa Data
Analisis data merupakan bagian penting dalam penelitian, karena dengan
analisis data yang diperoleh mampu memberikan arti dan makna untuk memecahkan masalah dan mengambil kesimpulan penelitian. Dalam penelitian ini teknik analisis data yang digunakan adalah analisis matematis untuk mendapatkan hasil penelitian. Analisis
ini adalah mengadakan perhitungan perhitungan berdasarkan rumus yang berlaku di dalam perhitungan kecepatan putaran motor.
Persamaan umum motor arus searah
�� = �� + ����
��ℎ = �� = ��ℎ.��ℎ
�� =�� + ��ℎ
Untuk menghitung efisiensi digunakan rumus sebagai berikut :
� = �� − ����
� =�.�.�
Maka :
�.�.� = ��− ����
�= �� − ����
�.�
3.5. Peralatan Yang Digunakan
Penelitian mengenai perbandingan efisiensi akibat penambahan kutub terhadap motor DC kompon pendek dan motor DC kompon panjang. Peralatan-peralatan yang
3. 2 Unit Tahanan Rheostat 4. Autotrafo
5. Kabel Penghubung
6. Motor Arus Searah AEG 1.2 Kw 7. Magnetik kontraktor
3.6 Rangkaian Pengujian
3.6.1 Rangkaian Pengujian Motor DC Penguatan Kompon Pada Kondisi berbeban
a. Untuk Motor DC Penguatan Kompon Panjang
M GA HB G GA HB n T S3 RL J K P T A C 3Φ R S T S + -E F A1 A2 V1 A3 1 V2 Ish
Is Ia
IL
K
AC P T D C J
S2
A4
+
-If
[image:52.595.104.517.348.564.2]b. Untuk Motor DC Penguatan Kompon Pendek M GA HB J K P T A C 3Φ R S T S +
-E F A1 A2 V1 A3 1 G GA HB n T S3 RL V2
IL Is Ia
Ish
K
AC P T D C J
S2
A4
+
-If
Gambar 3.6.2 Rangkaian pengujian motor DC penguatan kompon pendek pada kondisi berbeban
3.6.2 Rangkaian Pengujian Motor DC Penguatan Kompon Pada Kondisi Berbeban dengan penambahan kutub.
a. Untuk Motor DC Penguatan Kompon Panjang
M GA HB G GA HB n T S3 RL J K P T A C 3Φ R S T S + -E F A1 A2 V1 A3 1 V2 Ish
Is Ia
IL
K
AC P T D C J
S2
A4
+
-If
[image:53.595.103.515.128.341.2] [image:53.595.107.528.512.671.2]b. Untuk Motor DC Penguatan Kompon Pendek
Gambar 3.6.4 Rangkaian pengujian motor DC penguatan kompon pendek pada
kondisi berbeban dengan penambahan kutub.
3.7 Prosedur Pengujian
3.7.1 Prosedur Pengujian Motor DC Penguatan Kompon Pendek dan Kompon Panjang Pada Kondisi Berbeban
1. Peralatan di rangkai seperti gambar
2. Power Supply di hubungkan ke Autotrafo 3. Autotrafo diatur 100 volt
4. Pengukuran pertama adalah mencatat arus jangkar dan putaran motor
5. Beban diberikan dengan mengatur tahanan rheostat dari; 0.6;0.7;0.8;0.9;1kg, lalu arus jangkar dan putaran dicatat pada setiap penambahan beban. Tegangan
M GA HB J K P T A C 3F R S T S +
-E F A1
A2 V1 A3 1 G GA HB n T S3 RL V2
IL Is Ia
Ish
K
AC P T D C J
S2
A4
+
pada autotrafo di jaga konstan untuk setiap penambahan beban, dan arus medan di atur konstan dengan mengubah tahanan rheostat dan juga tegangan masukan
tetap dijaga konstan untuk setiap penambahan beban
6. Setelah pengambilan data, tegangan autotrafo diturunkan perlahan-lahan hingga minimum.
3.7.2 Prosedur Pengujian Motor DC Penguatan Kompon Pada Kondisi Berbeban dengan Penambahan kutub.
1. Peralatan di rangkai seperti gambar
2. Power Supply di hubungkan ke Autotrafo 3. Autotrafo diatur 100 volt
4. Pengukuran pertama adalah mencatat arus jangkar dan putaran motor
5. Beban diberikan dengan mengatur tahanan rheostat dari; 0.6;0.7;0.8;0.9;1(kg), lalu arus jangkar dan putaran dicatat pada setiap penambahan beban. Tegangan
pada autotrafo di jaga konstan untuk setiap penambahan beban, dan arus medan di atur konstan dengan mengubah tahanan rheostat dan juga tegangan masukan
tetap dijaga konstan untuk setiap penambahan beban.
BAB IV
ANALISA DATA
4.1. DATA HASIL PERCOBAAN MOTOR DC KOMPON PENDEK TANPA PENAMBAHAN KUTUB.
4.1.1. Data hasil percobaan motor dc kompon pendek tanpa penambahan kutub.
[image:56.595.116.507.365.468.2]Pada percobaan ini besar tegangan Vt =100 volt dan If = 0.08 ampere, sehingga diperoleh data seperti pada tabel berikut;
Tabel 4.1.1 Data Hasil Pengujian motor DC penguatan kompon pendek pada kondisi berbeban tanpa kutub.
Torsi beban IL ( amp ) Ia ( amp ) Ish ( amp ) n ( rpm )
0.6 5.06 4.98 0.08 900
0.7 5.46 5.38 0.08 850
0.8 5.92 5.84 0.08 790
0.9 6.43 6.35 0.08 750
1 7.09 7.01 0.08 700
4.1.2. Analisa data pada percobaan motor DC kompon pendek tanpa penambahan kutub.
Dari data- data di atas, maka dilakukan perhitungan untuk mendapatkan
efisiensi tiap torsi beban. 1. Torsi beban 0.6 kg
Pin = Vt . IL
Pin = 100 x 5.06 Pin = 506 watt
Vt = Ea+ IaRa
Ea = 100– 4.98 x 3.84 Ea = 80.87 V
Pout = Ea x Ia Pout = 80.87 x 4.98
Pout = 402.37 watt
Sehingga diperoleh efisiensi motor pada torsi beban 0.6 kg sebesar:
�(%) = Pout
Pin � 100%
�(%) = 402.37
506 � 100%
�(%) = 79.5%
2. Torsi beban 0.7 kg
Pin = 100 x 5.46 = 546 watt
Ea = 100 – 5.38 x 3.84 = 79.34 volt
Pout = 79.34 x 5.38 = 426.84 watt
Sehingga diperoleh efisiensi motor pada torsi beban 0.7 kg sebesar:
�(%) = 426.84
546 � 100% = 78.1%
3. Torsi beban 0.8 kg
Pin = 100 x 5.92 = 592 watt
Ea = 100 – 5.84 x 3.84 = 79.32 volt
Sehingga diperoleh efisiensi motor pada torsi beban 0.8 kg sebesar:
η(%) = 463.2
592 x 100% = 78.2%
4. Torsi beban 0.9 kg Pin = 100 x 6.43 = 643 watt
Ea = 100 – 6.43 x 3.84 = 75.31 volt
Pout = 75.31 x 6.43 = 484.24 watt
Sehingga diperoleh efisiensi motor pada torsi beban 0.9 kg sebesar:
η(%) = 484,24
643 x 100% = 75.31%
5. Torsi beban 1 kg
Pin = 100 x 7.09 = 709 watt
Ea = 100 – 7.09 x 3.84 = 72.76 volt
Pout = 72.76 x 7.09 = 515.86 watt
Sehingga diperoleh efisiensi motor pada torsi beban 1kgsebesar:
η(%) = 515.86
709 x 100% = 72.76%
[image:58.595.112.518.690.769.2]Dengan melakukan perhitungan seperti di atas pada tiap torsi beban, maka diperoleh efisiensinya seperti pada tabel berikut:
Tabel 4.1.2 Data Hasil Analisis Pengujian motor DC penguatan kompon pendek pada kondisi berbeban tanpa kutub.
Torsi beban IL( amp ) Ia ( amp ) Ish ( amp ) n ( rpm ) efisiensi ( % )
0.7 5.46 5.38 0.08 850 78.1%
0.8 5.92 5.84 0.08 790 78.2%
0.9 6.43 6.35 0.08 750 75.31%
1 7.09 7.01 0.08 700 72.76%
4.2. DATA HASIL PERCOBAAN MOTOR DC KOMPON PENDEK DENGAN PENAMBAHAN KUTUB.
4.2.1. Data hasil percobaan motor dc kompon pendek dengan penambahan kutub.
[image:59.595.115.512.97.166.2]Pada percobaan ini besar tegangan Vt = 100 volt dan If= 0.08, sehingga diperoleh data seperti pada tabel berikut;
Tabel 4.2.1. Data Hasil Pengujian motor DC penguatan kompon pendek pada kondisi berbeban dengan penambahan kutub.
Torsi
beban IL ( amp ) Ia ( amp ) Ish ( amp ) n ( rpm )
0.6 4.90 4.82 0.08 600
0.7 5.34 5.26 0.08 450
0.8 5.88 5.80 0.08 400
0.9 6.38 6.30 0.08 300
1 6.54 6.46 0.08 250
Dari data- data di atas, maka dilakukan perhitungan untuk mendapatkan efisiensi tiap torsi beban.
1. Torsi beban 0.6 kg Pin = Vt . IL
Pin = 100 x 4.9
Pin = 490 watt
Vt = Ea+ IaRa
Ea = Vt− IaRa
Ea = 100 – 4.82 x 3.84 Ea = 100 – 18.51
Ea = 81.49 V
Pout = Ea x Ia
Pout = 81.49 x 4.82 Pout = 392.78 watt
Sehingga diperoleh efisiensi motor pada torsi beban 0.6 sebesar:
�(%) = Pout
Pin � 100%
�(%) = 392.78
490 � 100%
�(%) = 80.16%
2. Torsi beban 0.7 kg Pin = 100 x 5.34 = 534 watt
Ea = 100 – 5.26 x 3.84 = 79.81 volt
Pout = 79.81 x 5.26 = 419.80 watt
�(%) = 419.80
534 � 100% = 78.61%
3. Torsi beban 0.8 kg
Pin = 100 x 5.88 = 588 watt
Ea = 100 – 5.80 x 3.84 = 77.73 volt
Pout = 77.73 x 5.80 = 450.83 watt
Sehingga diperoleh efisiensi motor pada torsi beban 0.8 kg sebesar:
η(%) = 450.83
588 x 100% = 76.67%
4. Torsi beban 0.9 kg
Pin = 100 x 6.38 = 638 watt
Ea = 100 – 6.30 x 3.84 =75 .81 volt
Pout = 75.81 x 6.30 = 477.60 watt
Sehingga diperoleh efisiensi motor pada torsi beban 0.9 kg sebesar:
η(%) = 477.60
638 x 100% = 74.86%
5. Torsi beban 1 kg
Pin = 100 x 6.54 = 654 watt Ea = 100 – 6.46 x 3.84 = 75.19 volt Pout = 75.19 x 6.46 = 485.73 watt
η(%) = 485.73
654 x 100% = 74.27%
[image:62.595.99.523.247.405.2]Dengan melakukan perhitungan seperti di atas pada tiap torsi beban, maka diperoleh efisiensinya seperti pada tabel berikut:
Tabel 4.2.2. Data Hasil Analisis Pengujian motor DC penguatan kompon pendek pada kondisi berbeban dengan kutub.
Torsi beban IL( amp ) Ia ( amp ) Ish ( amp ) n ( rpm ) efisiensi ( % )
0.6 4.90 4.82 0.08 600 80.16%
0.7 5.34 5.26 0.08 450 78.61%
0.8 5.88 5.80 0.08 400 76.67%
0.9 6.38 6.30 0.08 300 74.86%
1 6.54 6.46 0.08 250 74.27%
4.3. DATA HASIL PERCOBAAN MOTOR DC KOMPON PANJANG TANPA PENAMBAHAN KUTUB.
4.3.1. Data hasil percobaan motor dc kompon pendek dengan penambahan kutub.
Pada percobaan ini besar tegangan Vt = 100 volt, Ia = IL dan If= 0.08, sehingga diperoleh data seperti pada tabel berikut;
Tabel 4.3.1. Data Hasil Pengujian motor DC penguatan kompon panjang pada kondisi berbeban tanpa kutub.
Torsi beban Ia ( amp ) Ish ( amp ) n ( rpm )
0.6 5.28 0.08 900
0.7 5.68 0.08 850
0.8 6.25 0.08 800
0.9 6.60 0.08 750
[image:62.595.100.359.609.714.2]4.3.2. Analisa data percobaan motor dc kompon panjang tanpa penambahan kutub.
Dari data- data di atas, maka dilakukan perhitungan untuk mendapatkan efisiensi tiap torsi beban.
Ia = IL
1. Torsi beban 0.6 kg Pin = Vt . IL
Pin = 100 x 5.28 Pin = 528 watt
Vt = Ea+ IaRa
Ea = Vt− IaRa
Ea = 100 – 5.28 x 3.84
Ea = 100 – 20.27 = 79.73 V
Pout = Ea x Ia Pout = 79.73 x 5.28
Pout = 420.97 watt
Sehingga diperoleh efisiensi motor pada torsi beban 0.6 kg sebesar:
�(%) = Pout
Pin � 100%
�(%) = 420.97
528 � 100%
�(%) = 79.73%
Ea = 100 – 5.68 x 3.84 = 78.19volt
Pout = 78.19 x 5.68 = 444.12 watt
Sehingga diperoleh efisiensi motor pada torsi beban 0.7 kgsebesar:
�(%) = 444.12
568 � 100% = 78.19%
3. Torsi beban 0.8 kg Pin = 100 x 6.25 = 625 watt Ea = 100 – 6.25 x 3.84 = 76 volt
Pout = 76 x 6.25 = 475 watt
Sehingga diperoleh efisiensi motor pada torsi beban 0.8 kg sebesar:
η(%) = 475
625 x 100% = 76%
4. Torsi beban 0.9 kg
Pin = 100 x 6.60 = 660 watt
Ea = 100 – 6.60 x 3.84 =74.66 volt
Pout = 74.66 x 6.60 = 492.75 watt
Sehingga diperoleh efisiensi motor pada torsi beban 0.9 kg sebesar:
η(%) = 492.75
660 x 100% = 74.66%
5. Torsi beban 1 kg
Pin = 100 x 7.22 = 722 watt
Ea = 100 – 7.22 x 3.84 = 72.28 volt
Pout = 72.28 x 7.22 = 521.86 watt
η(%) = 521.86
722 x 100% = 72.28%
[i