PENGARUH PEN SEARAH PENGU
(Aplikasi pad
Diajukan untuk m pendidikan sarjana (
D
U
ENAMBAHAN KUTUB BANTU PADA MO UATAN SERI DAN SHUNT UNTUK MEM
RUGI-RUGI
ada Laboratorium Konversi Energi Listrik F
uk memenuhi salah satu persyaratan dalam men a (S-1) pada Departemen Teknik Elektro Sub J
Listrik
Oleh:
AL MAGRIZI FAHNI NIM : 090402004
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
2014
The image cannot be display ed. Your computer may not hav e enough memory to open the image, or the image may hav e been corrupted. Restart y our computer, and then open the file again. I f the red x still appears, y ou may hav e to delete the image and then insert it again.
OTOR ARUS EMPERKECIL
k FT-USU)
1. Bapak Ir. Syamsul Amien, M.S selaku Dosen Pembimbing Tugas Akhir penulis yang telah meluangkan waktunya untuk membimbing, membantu dan mengarahkan penulis dalam menyelesaikan Tugas Akhir ini.
2. Bapak Ir. Muhammad Zulfin, M.T selaku dosen wali penulis yang banyak memberikan masukan dan pengarahan selama penulis menempuh perkuliahan.
3. Bapak Ir. Surya Tarmizi Kasim, M.si selaku Ketua Departemen Teknik Elektro FT-USU, dan Bapak Rahmad Fauzi, ST, MT selaku Sekretaris Departemen Teknik Elektro FT-USU.
4. Om Isroi Tanjung, ST (Om Roy) selaku Pegawai di Lab. Konversi Energi Listrik FT-USU yang banyak membantu penulis selama proses pengambilan data.
5. Seluruh Staff Pengajar dan Pegawai di Departemen Teknik Elektro FT-USU.
6. Dara Pawiza Pohan, seorang teman, sahabat dan penyemangat yang luar biasa. Terima kasih atas dukungan dan doanya kepada penulis dalam menyelesaikan Tugas Akhir ini.
Budi, Arif, Reza, Leo, Asri Milaqmar, Shuhaimik Akbar Alhabsy, dan semua teman-teman angkatan 2009 lainnya.
8. Senior – seniorku yang baik hatinya (Bang Azhari, Bang Recky, Bang Pindo, Bang Ihksan, Bang Parlin, Bang Iqbal, dan lain-lain) yang telah bersedia berbagi pengalaman kepada penulis selama masa perkuliahan. 9. Adik–adik junior (Zein, Rais, Endra, Aspar, Fikry, Yoga, Angga, Wahyudi,
Mursid, Yahya, Dwi dan lain-lain) yang selalu siap sedia menolong penulis kapanpun dibutuhkan.
10. Asisten Lab. Konversi Energi Listrik FT-USU (Djaka, Diky, Dhuha, Bembeng) yang secara ikhlas membantu penulis selama proses pengambilan data.
11. Seluruh pihak yang tidak dapat penulis sebutkan satu persatu yang telah membantu penulis baik secara langsung maupun tidak langsung selama menjalani masa perkuliahan di Departemen Teknik Elektro FT-USU.
Penulis menyadari bahwa Tugas Akhirini masih jauh dari sempurna. Oleh karena itu, penulis sangat mengharapkan kritik dan saran yang membangun demi penyemepurnaan Tugas Akhir ini. Akhir kata, penulis berharap semoga Tugas Akhir ini dapat bermanfaat khususnya bagi penulis pribadi dan juga semua pihak yang membutuhkannya.
Medan, Juni 2014 Penulis
ABSTRAK
Penggunaan motor DC akhir-akhir ini mengalami perkembangan, khususnya dalam pemakaiannya sebagai motor penggerak. Terutama untuk menggerakkan beban yang berat dan bervarisasi. Oleh sebab itu, diharapkan motor DC dapat bekerja secara efisien. Pada saat motor DC dibebani, akan mengalir arus jangkar yang mengakibatkan terjadinya reaksi jangkar. Arus jangkar yang terlalu besar akan mengakibat timbulnya rugi-rugi daya pada motor DC, salah satu cara untuk memperkecil rugi-rugi daya pada motor DC adalah dengan penambahan kutub bantu pada motor DC.
DAFTAR ISI
KATA PENGANTAR ... i
ABSTRAK... iv
DAFTAR ISI ... v
DAFTAR GAMBAR ... viii
DAFTAR TABEL ... xi
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Tujuan penulisan ... 2
1.4 Manfaat Penulisan ... 2
1.5 Batasan Masalah ... 2
1.6 Metode Penulisan ... 3
1.7 Sistematika Penulisan ... 4
BAB II DASAR TEORI 2.1 Umum... 6
2.2 Konstruksi Motor Arus Searah ... 7
2.3 Prinsip Kerja Motor Arus Searah ... 11
2.4 Reaksi Jangkar ... 15
2.5 Mengatasi Reaksi Jangkar... 18
2.5.2 Penambahan Kutub Bantu(interpole)... 20
2.5.3 Belitan Kompensasi(Compensating Windings)... 21
2.6 Jenis-Jenis Motor Arus Searah ... 22
2.6.1 Motor Arus Searah Penguatan Bebas ... 22
2.6.2 Motor Arus Searah Penguatan Sendiri ... 23
2.6.2.1 Motor Arus Searah Penguatan Seri ... 24
2.6.2.2 Motor Arus Searah Penguatan Shunt ... 25
2.6.2.3 Motor Arus Searah Penguatan Kompon ... 26
2.7 Gaya Gerak Listrik Lawan Pada Motor Arus Searah ... 28
2.8 Rugi-rugi Pada Motor Arus Searah ... 29
2.8.1 Rugi-rugi Tembaga (copper losses)... 31
2.8.2 Rugi-rugi Inti(core or iron losses)... 32
2.8.3 Rugi-rugi Sikat(brush losses)... 34
2.8.4 Rugi-rugi Mekanik(mechanical losses)... 34
2.8.5 Rugi-rugi Beban Stray(stray load losses)... 35
BAB III METODE PENELITIAN 3.1 Tempat dan Waktu Penelitian ... 37
3.2 Metode Pengumpulan Data ... 37
3.3 Langkah-Langkah Penelitian ... 38
3.4 Analisa Data ... 39
3.5 Peralatan Yang Digunakan... 40
Tanpa Beban ... 41
3.6.2 Rangkaian Pengujian Motor DC Penguatan Seri Pada Kondisi Berbeban ... 42
3.6.3 Rangkaian Pengujian Motor DC Penguatan Shunt Pada Kondisi Tanpa Beban ... 43
3.6.4 Rangkaian Pengujian Motor DC Penguatan Shunt Pada Kondisi Berbeban ... 44
3.7 Prosedur Pengujian ... 45
3.7.1 Prosedur Pengujian Motor DC Penguatan Seri Dan Shunt Pada Kondisi Tanpa Beban ... 45
3.7.2 Prosedur Pengujian Motor DC Penguatan Seri Dan Shunt Pada Kondisi Berbeban ... 46
BAB IV HASIL DAN PEMBAHASAN 4.1 Umum ... 48
4.2 Hasil Penelitian ... 49
4.3 Analisa Data ... 51
4.4 Grafik Pengujian ... 74
BAB V KESIMPULAN DAN SARAN 5.1 Kesimpulan ... 77
5.2 Saran ... 78
DAFTAR GAMBAR
Gambar 2.1 Konstruksi motor arus searah bagian stator... 7
Gambar 2.2 Konstruksi motor arus searah bagian rotor... 7
Gambar 2.3 Pengaruh penempatan konduktor berarus dalam medan magnet ... 11
Gambar 2.4 Prinsip perputaran motor arus searah ... 13
Gambar 2.5 Fluksi yang dihasilkan oleh kumparan medan ... 15
Gambar 2.6 Fluksi yang dihasilkan oleh kumparan jangkar ... 16
Gambar 2.7 Hasil kombinasi antara fluksi medan dan fluksi jangkar... 17
Gambar 2.8 Pelemahan ggm akibat pergeseran bidang netral ... 20
Gambar 2.9 Motor arus searah yang dilengkapi dengan kutub bantu ... 21
Gambar 2.10Rangkaian ekivalen motor arus searah penguatan bebas ... 22
Gambar 2.11Rangkaian ekivalen motor arus searah penguatan seri... 24
Gambar 2.12Rangkaian ekivalen motor arus searah penguatan shunt ... 25
Gambar 2.13Rangkaian ekivalen motor arus searah penguatan kompon pendek... 27
Gambar 2.14Rangkaian ekivalen motor arus searah penguatan kompon panjang ... 28
Gambar 2.15Diagram aliran daya pada motor arus searah ... 30
Gambar 2.16Perputaran jangkar di dalam motor dua kutub ... 32
tanpa beban dan tanpa kutub bantu ... 41 Gambar 3.2 Rangkaian pengujian motor DC penguatan seri pada kondisi
tanpa beban dengan kutub bantu ... 42 Gambar 3.3 Rangkaian pengujian motor DC penguatan seri pada kondisi
berbeban tanpa kutub bantu... 42 Gambar 3.4 Rangkaian pengujian motor DC penguatan seri pada kondisi
berbeban dengan kutub bantu ... 43 Gambar 3.5 Rangkaian pengujian motor DC penguatan shunt pada kondisi
tanpa beban dan tanpa kutub bantu ... 43 Gambar 3.6 Rangkaian pengujian motor DC penguatan shunt pada kondisi
tanpa beban dengan kutub bantu ... 44 Gambar 3.7 Rangkaian pengujian motor DC penguatan shunt pada kondisi
berbeban tanpa kutub bantu... 44 Gambar 3.8 Rangkaian pengujian motor DC penguatan shunt pada kondisi
berbeban dengan kutub bantu ... 45 Gambar 4.1 Grafik beban dengan daya input motor DC penguatan
seri ... 74 Gambar 4.2 Grafik beban dengan rugi-rugi daya motor DC penguatan
seri ... 74 Gambar 4.3 Grafik beban dengan daya output motor DC penguatan
seri ... 75 Gambar 4.4 Grafik beban dengan daya input motor DC penguatan
Gambar 4.5 Grafik beban dengan rugi-rugi daya motor DC penguatan
shunt ... 76 Gambar 4.6 Grafik beban dengan daya output motor DC penguatan
DAFTAR TABEL
Tabel 4.1 Data Hasil Pengujian Motor DC Penguatan Seri Tanpa Beban Dan Tanpa Kutub Bantu ... 49 Tabel 4.2 Data Hasil Pengujian Motor DC Penguatan Seri Tanpa Beban Dan
Berkutub Bantu ... 49 Tabel 4.3 Data Hasil Pengujian Motor DC Penguatan Seri Berbeban Dan
Tanpa Kutub Bantu ... 49 Tabel 4.4 Data Hasil Pengujian Motor DC Penguatan Seri Berbeban Dan
Berkutub Bantu ... 50 Tabel 4.5 Data Hasil Pengujian Motor DC Penguatan Shunt Tanpa Beban
Dan Tanpa Kutub Bantu... 50 Tabel 4.6 Data Hasil Pengujian Motor DC Penguatan Shunt Tanpa Beban
Dan Berkutub Bantu... 50 Tabel 4.7 Data Hasil Pengujian Motor DC Penguatan Shunt Berbeban
Dan Tanpa Kutub Bantu... 51 Tabel 4.8 Data Hasil Pengujian Motor DC Penguatan Shunt Berbeban Dan
Berkutub Bantu ... 51 Tabel 4.9 Hasil Analisis Data Pengujian Motor DC Penguatan Seri Tanpa
Kutub Bantu ... 62 Tabel 4.10Hasil Analisis Data Pengujian Motor DC Penguatan Seri Dengan
Kutub Bantu ... 62 Tabel 4.11Hasil Analisis Data Pengujian Motor DC Penguatan Shunt Tanpa
ABSTRAK
Penggunaan motor DC akhir-akhir ini mengalami perkembangan, khususnya dalam pemakaiannya sebagai motor penggerak. Terutama untuk menggerakkan beban yang berat dan bervarisasi. Oleh sebab itu, diharapkan motor DC dapat bekerja secara efisien. Pada saat motor DC dibebani, akan mengalir arus jangkar yang mengakibatkan terjadinya reaksi jangkar. Arus jangkar yang terlalu besar akan mengakibat timbulnya rugi-rugi daya pada motor DC, salah satu cara untuk memperkecil rugi-rugi daya pada motor DC adalah dengan penambahan kutub bantu pada motor DC.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Motor listrik merupakan perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik dalam bentuk putaran. Pada motor DC (motor arus searah) energi listrik yang diubah adalah energi arus searah yang berasal dari sumber tegangan listrik arus searah. Dimana sumber tegangan ini dihubungkan ke kumparan medan dan kumparan jangkar dari motor tersebut. Kumparan medan pada motor arus searah disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Fungsi motor adalah menghasilkan kopel (torsi).
Motor arus searah sangat banyak digunakan dalam aplikasi industri. Penggunaan motor arus searah dapat dijumpai pada traksi, elevator, conveyer, dan sebagainya. Dalam penggunaannya diharapkan motor arus searah dapat bekerja secara efisien, dimana efisiennya suatu motor arus searah dapat kita lihat dari besar nilai efisiensinya.
1.2 Rumusan Masalah
Dari latar belakang diatas, maka dapat dirumuskan permasalahan dalam Tugas Akhir ini yaitu bagaimana pengaruh penambahan kutub bantu pada motor arus searah untuk memperkecil rugi-rugi.
1.3 Tujuan Penulisan
Adapun tujuan penulisan Tugas Akhir ini adalah untuk mengetahui pengaruh penambahan kutub bantu pada motor arus searah untuk memperkecil rugi-rugi.
1.4 Manfaat Penulisan
Manfaat penelitian ini adalah mengetahui cara kerja mesin arus searah dengan penambahkan kutub bantu serta memberikan kesempatan bagi mahasiswa lain untuk mempelajarinya lebih lanjut.
1.5 Batasan Masalah
1. Motor yang digunakan adalah motor arus searah penguatan seri dan shunt. 2. Rugi-rugi yang di hitung adalah rugi-rugi tembaga dan rugi-rugi konstan. 3. Rugi-rugi konstan pada motor dihitung berdasarkan data-data yang
diperoleh dari hasil pengujian pada kondisi tanpa beban.
4. Pembahasan dititikberatkan pada perubahan rugi-rugi motor karena penambahan kutub bantu.
5. Tidak membahas gangguan yang terjadi pada motor.
6. Analisis perhitungan berdasarkan peralatan yang tersedia di Laboratorium Konversi Energi Listrik FT-USU.
1.6 Metode Penulisan
Untuk dapat menyelesaikan tugas akhir ini maka penulis menerapkan beberapa metode studi diantaranya :
1. Studi literatur yaitu dengan membaca teori-teori yang berkaitan dengan topik tugas akhir ini dari buku-buku referensi baik yang dimiliki oleh penulis atau di perpustakaan dan juga dari artikel-artikel, jurnal, internet dan lain-lain.
2. Studi lapangan yaitu dengan melaksanakan percobaan di Laboratorium Konversi Energi Listrik FT USU.
1.7 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut:
BAB I PENDAHULUAN
Bab ini merupakan pendahuluan yang berisi tentang latar belakang masalah, tujuan dan manfaat penulisan, batasan masalah, metode dan sistematika penulisan.
BAB II DASAR TEORI
Bab ini membahas tentang motor DC (motor arus searah) secara umum, konstruksi, prinsip kerja, reaksi jangkar, gaya gerak listrik lawan, jenis-jenis motor arus searah dan rugi-rugi pada motor arus searah penguatan.
BAB III METODE PENELITIAN
Bab ini membahas tentang cara yang harus ditempuh dalam kegiatan penelitian agar pengetahuan yang akan dicapai dari suatu penelitian dapat memenuhi harga ilmiah.
BAB IV PENGARUH PENAMBAHAN KUTUB BANTU PADA MOTOR ARUS SEARAH PENGUATAN SERI DAN SHUNT UNTUK MEMPERKECIL RUGI-RUGI
tanpa beban dan kondisi berbeban, perhitungan rugi-rugi serta grafik pengujian.
BAB V KESIMPULAN DAN SARAN
BAB II
DASAR TEORI
2.1 Umum
Motor arus searah adalah mesin yang mengubah energi listrik arus searah menjadi energi mekanis yang berupa putaran. Pada prinsip pengoperasiannya, motor arus searah sangat identik dengan generator arus searah. Kenyataannya mesin yang bekerja sebagai generator arus searah akan dapat bekerja sebagai motor arus searah. Oleh sebab itu, sebuah mesin arus searah dapat digunakan baik sebagai motor arus searah maupun generator arus searah.
Berdasarkan fisiknya motor arus searah secara umum terdiri atas bagian yang diam dan bagian yang berputar. Pada bagian yang diam (stator) merupakan tempat diletakkannya kumparan medan yang berfungsi untuk menghasilkan fluksi magnet sedangkan pada bagian yang berputar (rotor) ditempati oleh rangkaian jangkar seperti kumparan jangkar, komutator dan sikat.
2.2 Konstruksi M
Secara umum konst 1) Stator (bagian yang 2) Rotor (bagian yan
komutator.
Untuk lebih j Gambar 2.1 dan Gamba
Gambar
Gambar
Gambar
si Motor Arus Searah
um konstruksi motor arus searah terbagi atas dua ang diam), terdiri dari rangka, komponen magne yang berputar), terdiri dari jangkar, kumpara
h jelasnya, konstruksi motor arus searah dap mbar 2.2 dibawah ini :
bar 6.1 Konstruksi motor arus searah bagian st
ar 2.1 Konstruksi motor arus searah bagian sta
bar 2.2 Konstruksi motor arus searah bagian rot
s dua bagian, yaitu : gnet dan sikat. paran jangkar dan
dapat dilihat pada
n stator
n stator
Keterangan dari Gambar 6.1 dan Gambar 6.2 tersebut adalah :
1. Rangka
Rangka motor arus searah adalah tempat meletakkan sebagian besar komponen mesin dan melindungi bagian mesin. Untuk itu rangka harus dirancang memiliki kekuatan mekanis yang tinggi untuk mendukung komponen-komponen mesin tersebut.
Rangka juga berfungsi sebagai tempat mengalirkan fluksi magnet yang dihasilkan oleh kutub-kutub medan. Rangka dibuat dengan menggunakan bahan ferromagnetik yang memiliki permeabilitas tinggi. Rangka biasanya terbuat dari baja tuang (cast steel) atau baja lembaran (rolled steel) yang berfungsi sebagai penopang mekanis dan juga sebagai bagian dari rangkaian magnet.
Pada rangka terdapat papan nama (name plat) yang bertuliskan spesifikasi umum atau data teknik dari motor. Papan nama tersebut untuk mengetahui beberapa hal pokok yang perlu diketahui dari motor tersebut.
2. Kutub Medan
Kutub medan terdiri atas inti kutub dan sepatu kutub. Sepatu kutub yang berdekatan dengan celah udara dibuat lebih besar dari badan inti. Adapun fungsi dari sepatu kutub adalah :
a. Sebagai pendukung secara mekanis untuk kumparan medan.
Inti kutub terbuat dari lembaran-lembaran besi tuang atau baja tuang yang terisolasi satu sama lain. Kutub medan (inti kutub dan sepatu kutub) direkatkan bersama-sama kemudian dibuat pada rangka.
3. Sikat
Sikat adalah jembatan bagi aliran arus ke kumparan jangkar. Dimana permukaan sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik. Sikat memegang peranan penting untuk terjadinya komutasi. Sikat terbuat dari bahan karbon dengan tingkat kekerasan yang bermacam-macam dan dalam beberapa hal dibuat dari campuran karbon dan logam tembaga. Sikat harus lebih lunak daripada segmen-segmen komutator supaya gesekan yang terjadi antara segmen-segmen komutator dan sikat tidak mengakibatkan ausnya komutator.
4. Kumparan Medan
Kumparan medan adalah susunan konduktor yang dibelitkan pada inti kutub. Dimana konduktor tersebut terbuat dari kawat tembaga yang berbentuk bulat ataupun persegi. Belitan medan berfungsi untuk menghasilkan fluksi utama yang dibentuk dari kumparan pada setiap kutub.
5. Inti Jangkar
mengurangi panas yang terbentuk karena adanya arus liar (eddy current). Inti jangkar terbuat dari bahan ferromagnetik yaitu sejenis campuran baja silikon.
6. Kumparan Jangkar
Kumparan jangkar pada motor arus searah merupakan tempat dibangkitkannya ggl induksi. Kumparan jangkar ditempatkan di dalam alur-alur inti jangkar. Jenis-jenis konstruksi kumparan jangkar pada rotor ada tiga macam, yaitu : Kumparan jerat (lap winding), Kumparan gelombang (wave winding), Kumparan zig-zag(frog-leg winding).
7. Komutator
Untuk memperoleh tegangan searah diperlukan alat penyearah yang disebut komutator. Komutator terdiri dari sejumlah segmen tembaga yang berbentuk lempengan-lempengan yang dirakit ke dalam silinder yang terpasang pada poros. Agar dihasilkan tegangan arus searah yang konstan, maka komutator yang digunakan hendaknya dalam jumlah yang besar.
8. Celah Udara
2.3 Prinsip Kerja M
Motor arus se Lorentz yang menyata
di dalam medan mag suatu gaya”. Gaya
dinamakan gaya Lore magnet disekelilingny pada suatu medan ma diperlihatkan pada Ga
Gambar 2.3 Penga
Kuat medan m mengalir dalam kondukt
rja Motor Arus Searah
us searah mempunyai prinsip kerja berdasar atakan : “jika sebatang penghantar listrik yang
agnet maka pada kawat penghantar tersebut a yang terbentuk merupakan gaya mekani orentz. Sebuah konduktor yang dialiri arus mem
nya. Pada saat konduktor yang dialiri arus list agnet, maka konduktor akan mengalami gaya Gambar 2.3 berikut :
(a) (b)
(c)
ngaruh penempatan konduktor berarus dalam m
n magnet yang timbul tergantung pada besa konduktor, seperti ditunjukkan oleh persamaan (2.1
H =
I N
...( sarkan percobaan
ng berarus berada
but akan terbentuk kanik yang sering empunyai medan listrik ditempatkan ya mekanik seperti
medan magnet
sarnya arus yang n (2.1) berikut ini :
Dimana :
H = kuat medan magnet (lilitan Ampere/meter) N = banyak kumparan (lilitan)
I = arus yang mengalir pada penghantar (Ampere)
= panjang dari penghantar (meter)
Pada Gambar 2.3(a) menunjukkan sebuah medan magnet seragam yang dihasilkan oleh kutub-kutub magnet utara dan selatan yang arahnya dari kutub utara menuju kutub selatan. Sedangkan Gambar 2.3(b) menggambarkan sebuah konduktor yang dialiri arus searah dan menghasilkan medan magnet (garis-garis gaya fluksi) disekelilingnya.
Jika konduktor yang dialiri arus tersebut ditempatkan di dalam medan magnet seragam, maka interaksi kedua medan akan menimbulkan medan yang tidak seragam seperti yang ditunjukkan pada Gambar 2.3 (c). Sehingga kerapatan fluksi akan bertambah besar di atas sebelah kanan konduktor (dekat kutub selatan) dan di bawah sebelah kiri konduktor (dekat kutub utara) sedangkan kerapatan fluksi menjadi berkurang di atas sebelah kiri konduktor dan di bawah sebelah kanan konduktor.
jangkar maka arus yang mengalir pada kumparan jangkar juga besar, dengan demikian gaya yang terjadi pada konduktor juga semakin besar.
Jika arus jangkar (I) tegak lurus dengan arah induksi magnetik (B), maka besar gaya (F) yang dihasilkan oleh arus yang mengalir pada konduktor jangkar sepanjang yang ditempatkan dalam suatu medan magnet dapat ditunjukkan oleh
persamaan (2.2) :
F = B . I . ....……...………...………(2.2)
Dimana :
F = gaya Lorentz (Newton)
I = arus yang mengalir pada konduktor jangkar (Ampere) B = kerapatan fluksi (Weber/meter2)
= panjang konduktor jangkar (meter)
Maka besar gaya keseluruhan yang ditimbulkan oleh jumlah total konduktor jangkar ditunjukkan oleh persamaan (2.3) :
. I . B . Z
F ...………...……(2.3) Dimana :
Z = jumlah total konduktor jangkar
Gaya yang terjadi pada kumparan jangkar di atas akan menghasilkan torsi yang besarnya ditunjukkan oleh persamaan (2.4) :
r . F
Ta ...………...…(2.4)
Jika persamaan (2.3) disubstitusikan ke persamaan (2.4), maka akan menghasilkan persamaan (2.5) :
r . . I . B . Z
U
S
O M
Bidang Netral Magnetis
Sikat
F
Dimana :
a
T = torsi jangkar (Newton-meter)
r = jari-jari rotor (meter)
Apabila torsistartlebih besar dari torsi beban, maka jangkar akan berputar.
2.4 Reaksi Jangkar
Reaksi jangkar merupakan pengaruh medan magnet yang disebabkan oleh mengalirnya arus pada jangkar, dimana jangkar tersebut berada di dalam medan magnet. Reaksi jangkar menyebabkan terjadinya dua hal, yaitu :
1. Demagnetisasi atau penurunan kerapatan fluksi medan utama. 2. Magnetisasi silang.
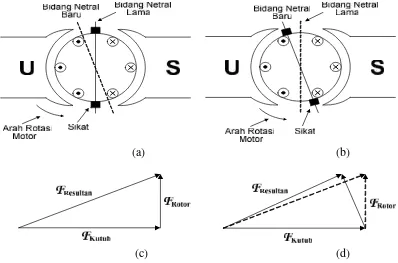
Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar tidak dialiri oleh arus, maka dengan mengabaikan pengaruh celah udara, jalur fluksi ideal untuk kutub utama dari motor arus searah dua kutub, berasal dari kutub utara menuju kutub selatan seperti pada Gambar 2.5 berikut ini :
Fluksi didistribusikan simetris terhadap bidang netral magnetis. Sikat ditempatkan bertepatan dengan bidang netral magnetis.
Bidang netral magnetis didefinisikan sebagai bidang di dalam motor dimana konduktor bergerak sejajar dengan garis gaya magnet (ggm) sehingga gaya gerak listrik (ggl) induksi konduktor pada bidang tersebut adalah nol. Seperti yang terlihat dari Gambar 2.5 sikat selalu ditempatkan di sepanjang bidang netral magnetis. Oleh karena itu, bidang netral magnetis juga disebut sebagai sumbu komutasi karena pembalikan arah arus jangkar berada pada bidang tersebut. Vektor OFMmewakili besar dan arah dari fluksi medan utama, dimana vektor ini tegak lurus terhadap bidang netral magnetis.
Sewaktu hanya konduktor jangkar saja yang dialiri oleh arus listrik sementara kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar timbul garis gaya magnet atau fluksi. Gambaran arah garis gaya magnet ditunjukkan pada Gambar 2.6 berikut ini :
Gambar 2.6 Fluksi yang dihasilkan oleh kumparan jangkar
magnetis. Pada prakteknya, sewaktu mesin beroperasi maka konduktor jangkar dan konduktor medan sama- sama dialiri oleh arus listrik, distribusi fluksi resultan diperoleh dari menggabungkan kedua fluksi tersebut. Oleh karena itu distribusi fluksi medan utama yang melalui jangkar tidak lagi simetris tetapi sudah mengalami pembelokan saat mendekati konduktor yang dialiri arus tersebut. Hal tersebut dikarenakan pengaruh fluksi jangkar yang dapat dilihat dari Gambar 2.7 berikut ini :
Gambar 2.7 Hasil kombinasi antara fluksi medan dan fluksi jangkar
Magnetisasi-silang ini juga menyebabkan pergeseran bidang netral. Pada Gambar 2.7 dapat dilihat bahwa vektor OFr merupakan resultan vektor OFAdan OFM, serta posisi bidang netral magnetis yang baru, di mana selalu tegak lurus
terhadap vektor OFr. Bidang netral magnetis motor yang baru bergeser sejauh
karena posisi bidang netral magnetis ini selalu tegak lurus terhadap vektor OF. Dengan pergeseran bidang netral ini maka sikat juga akan bergeser sejauh pergeseran bidang netral magnetis. Hal ini dapat menimbulkan bunga api di segmen komutator dekat sikat.
Kebanyakan mesin listrik bekerja pada kerapatan fluksi yang dekat titik jenuhnya, sehingga dapat menimbulkan kejenuhan magnetik. Apabila kejenuhan magnetik ini terjadi, maka efek penguatan fluksi resultan lebih kecil bila dibandingkan dengan efek pelemahan fluksi resultan atau dengan kata lain pertambahan kerapatan fluksi resultan pada salah satu bagian kutub lebih sedikit bila dibandingkan dengan pengurangan keraptan fluksi pada bagian yang lainnya. Sehingga fluksi resultan akan berkurang dari harga tanpa bebannya. Hali inilah yang disebut efek demagnetisasi reaksi jangkar dan perlu diingat bahwa demagnetisasi hanya terjadi karena adanya saturasi magnetik.
2.5 Mengatasi Reaksi Jangkar
itu, harus dilakukan tindakan yang sesuai terhadap motor arus searah agar pengaruh reaksi jangkar tersebut dapat dikurangi.
Ada tiga cara yang dapat dilakukan untuk mengurangi reaksi jangkar yang terjadi pada motor arus searah, yaitu:
1. Pergeseran sikat (brush shifting)
2. Kutub-kutub komutasi (comutating poles/interpoles) 3. Belitan kompensasi (compensating windings)
2.5.1 Pergeseran Sikat (Brush Shifting)
Ide dasarnya adalah dengan memindahkan sikat seirama dengan perpindahan bidang netral untuk menghindari percikan bunga api yang timbul. Namun dalam penerapannya hal ini cukup sulit karena jarak perpindahan bidang netralnya sangat ditentukan oleh besarnya beban yang dipikul, maka jarak perpindahan bidang netralnya pun berpindah, sehingga sikat juga harus diubah setiap saat, seirama dengan perubahan jarak perpindahan bidang netral. Selain itu pergeseran sikat akan memperburuk melemahnya fluks akibat reaksi jangkar mesin, selain dengan metode ini mesin arus searah tidak dimungkinkan untuk bekerja sebagai generator (akan menimbulkan percikan api yang lebih besar), dan sangat tidak ekonomis terutama untuk mesin-mesin berukuran kecil.
mesin. Akibat pergeseran tersebut, ggm resultannya melemah sedemikian rupa. Hal tersebut dapat dilihat pada Gambar 2.8(d).
(a) (b)
[image:34.595.114.512.168.431.2](c) (d)
Gambar 2.8 Pelemahan ggm akibat pergeseran bidang netral
2.5.2 Penambahan Kutub Bantu (Interpole)
Ketika beban meningkat, besarnya pe tersebut akan menyeba sedang melakukan kom menghasilkan tegang dengan tegangan yang
Gambar 2.9 M
2.5.3 Belitan Komp
Belitan kompe ini bertujuan untuk m Fluks yang ditimbul ditimbulkan oleh belit beban berubah, maka fluks belitan kompensa
ban yang dipikul motor meningkat dan arus a perubahan atau pergeseran bidang netral meni yebabkan timbulnya tegangan pada konduktor-n komutasi. Pada saat itu fluks interpole jug
angan pada konduktor-konduktor tersebut da ang timbul akibat pergeseran bidang netral.
Motor arus searah yang dilengkapi dengan kut
mpensasi (Compensating Windings)
pensasi ini dihubungkan seri terhadap kumpar uk mengurangi penyimpangan yang timbul akibat
bulkan oleh reaksi jangkar diimbangi ole belitan kompensasi yang besarnya sama dan berl
aka reaksi jangkar yang berubah akan selalu pensasi, sehingga bidang netralnya tidak bergeser
rus jangkar juga eningkat pula. Hal or-konduktor yang juga meningkat, dan berlawanan
kutub bantu
Teknik ini memiliki kelemahan yaitu harganya mahal, dan juga masih memerlukan interpole untuk mengatasi tegangan yang tidak dapat diatasi oleh belitan kompensasi. Oleh sebab itu teknik ini digunakan untuk motor-motor yang bekerja ekstra berat, dimana pelemahan fluks akan menjadi masalah yang serius.
2.6 Jenis–Jenis Motor Arus Searah
Berdasarkan sumber tegangan penguatannya, motor arus searah dapat dibagi menjadi dua, yaitu :
1. Motor arus searah penguatan bebas 2. Motor arus searah penguatan sendiri
2.6.1 Motor Arus Searah Penguatan Bebas
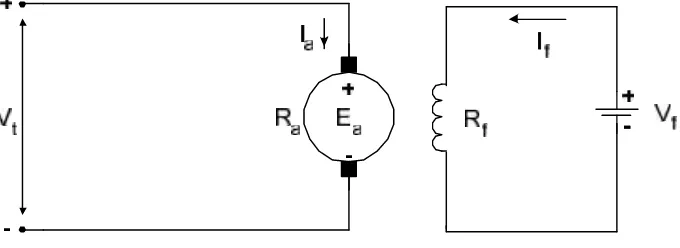
[image:36.595.143.483.575.699.2]Motor arus searah penguatan bebas adalah motor arus searah yang sumber tegangan penguatannya berasal dari luar motor. Pada motor ini, kumparan medan tidak terhubung dengan kumparan jangkar. Masing-masing kumparan tersebut disuplai dengan sumber tegangan DC tersendiri. Rangkaian ekivalen motor arus searah penguatan bebas dapat dilihat pada Gambar 2.10 di bawah ini :
Berdasarkan hukum Kirchoff tentang tegangan, dari Gambar 2.10 diperoleh persamaan tegangan terminal motor seperti persamaan (2.6) :
Vt = Ea+ Ia.Ra+ Vsikat…..………...(2.6)
Dari Gambar 2.10 diperoleh juga persamaan tegangan terminal penguat medan dari motor tersebut seperti ditunjukkan oleh persamaan (2.7) :
Vf = If. Rf………...……….……….…...(2.7) Dimana:
Vt = tegangan terminal jangkar motor arus searah (Volt) Ra = tahanan jangkar (Ohm)
If = arus medan penguatan bebas (Ampere)
Vf = tegangan terminal medan penguatan bebas (Volt) Rf = tahanan medan penguatan bebas (Ohm)
Ea = gaya gerak listrik motor arus searah (Volt) Vsikat = jatuh tegangan pada sikat (Volt)
Umumnya jatuh tegangan pada sikat relatif kecil sehingga besarnya dapat diabaikan, maka untuk rumus selanjutnya Vsikatini diabaikan.
2.6.2 Motor Arus Searah Penguatan Sendiri
Berdasarkan hubungan kumparan medan dengan kumparan jangkarnya, motor arus searah penguatan sendiri dapat diklasifikasikan sebagai berikut : 1. Motor arus searah penguatan seri
2. Motor arus searah penguatan shunt 3. Motor arus searah penguatan kompon
2.6.2.1 Motor Arus Searah Penguatan Seri
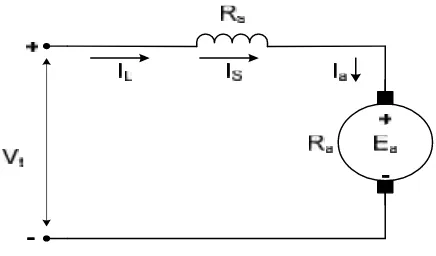
[image:38.595.204.422.331.459.2]Rangkaian ekivalen motor arus searah penguatan seri ditunjukkan pada Gambar 2.11 di bawah ini :
Gambar 2.11 Rangkaian ekivalen motor arus searah penguatan seri
membahayakan. Oleh karena itu, disarankan hindari pengoperasian motor arus searah penguatan seri dalam keadaan tanpa beban.
Dari Gambar 2.11 diperoleh persamaan tegangan terminal motor seperti ditunjukkan oleh persamaan (2.8) :
Vt = Ea+ Is.Rs+ Ia. Ra………..………...(2.8) Karena IL = Ia = Is
Maka persamaan (2.8) dapat juga ditulis seperti persamaan (2.9) :
Vt = Ea+ Ia(Ra+ Rs) ………....(2.9)
Dimana :
Is = arus kumparan medan seri (Ampere) Rs = tahanan medan seri (Ohm)
IL = arus dari jala-jala (Ampere)
2.6.2.2 Motor Arus Searah Penguatan Shunt
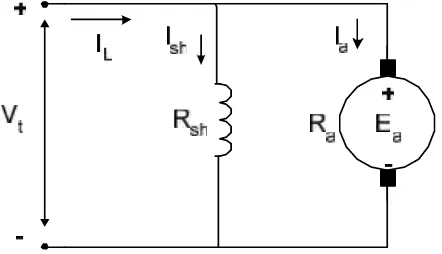
[image:39.595.203.424.575.702.2]Rangkaian ekivalen motor arus searah penguatan shunt ditunjukkan pada Gambar 2.12 di bawah ini :
Pada motor arus searah penguatan shunt, kumparan medan dihubungkan langsung pada terminal sehingga paralel dengan kumparan jangkar. Motor arus searah penguatan shunt mempunyai pengaturan kecepatan yang baik dan digolongkan sebagai motor kecepatan konstan walaupun kecepatannya agak bekurang sedikit dengan bertambahnya beban.
Dari Gambar 2.12 diperoleh persamaan tegangan terminal motor seperti ditunjukkan oleh persamaan (2.10) :
Vt = Ea+ Ia.Ra ………….……….…...(2.10)
Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh persamaan (2.11) dan persamaan (2.12) :
sh
I =
sh t R
V
……….………(2.11)
IL = Ia+ Ish ………...(2.12)
Dimana :
Ish = arus kumparan medan shunt (Ampere) Rsh = tahanan medan shunt (Ohm)
2.6.2.3 Motor Arus Searah Penguatan Kompon
Pada motor arus searah penguatan kompon pendek, kumparan medan serinya terhubung secara paralel terhadap kumparan jangkar dan kumparan medan shunt. Rangkaian ekivalen motor arus searah penguatan kompon pendek ditunjukkan oleh Gambar 2.13 di bawah ini :
Gambar 2.13 Rangkaian ekivalen motor arus searah penguatan kompon pendek Dari Gambar 2.13 diperoleh persamaan tegangan terminal motor arus searah penguatan kompon pendek seperti ditunjukkan oleh persamaan (2.13) :
Vt = Ea+ Is.Rs+ Ia. Ra...(2.13) Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh
persamaan (2.14) :
IL = Is = Ia+ Ish...(2.14)
Gambar 2.14 Rangkaian ekivalen motor arus searah penguatan kompon panjang
Dari Gambar 2.14 diperoleh persamaan tegangan terminal motor arus searah penguatan kompon panjang seperti ditunjukkan oleh persamaan (2.15) :
Vt = Ea+ Is.Rs+ Ia.Ra...(2.15)
Karena Is = Ia
Maka persamaan (2.15) dapat juga ditulis seperti persamaan (2.16) :
Vt = Ea+ Ia(Rs+ Ra) ...(2.16) Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh persamaan (2.17) dan persamaan (2.18) :
IL = Ia+ Ish...(2.17)
sh
I =
sh t R
V
………..………(2.18)
2.7 Gaya Gerak Listrik (GGL) Lawan Pada Motor Arus Searah
maka pada konduktor tersebut akan timbul gaya gerak listrik (ggl) induksi yang diinduksikan pada konduktor tersebut. Sesuai dengan hukum Lentz, arah ggl induksi tersebut berlawanan dengan tegangan yang diberikan pada motor dan dikenal sebagai ggl lawan atau ggl balik Ea.
Besarnya tegangan yang diinduksikan tersebut sesuai dengan persamaan (2.19) : Ea= a P . 60 Z
. n .Ф...(2.19)
Karena 60 . a Z . P
bernilai konstan, maka dapat dianggap sebagai suatu konstanta K
sehingga persamaan (2.19) dapat juga ditulis seperti persamaan (2.20) :
Ea= K .n . Ф...(2.20) Dimana :
Ea = gaya gerak listrik lawan motor arus searah (Volt) K = konstanta (bergantung pada ukuran fisik motor) n = kecepatan putaran jangkar (rotasi per menit)
= fluksi setiap kutub (Weber)P = jumlah kutub
Z = jumlah total konduktor jangkar a = jumlah kumparan tersambung paralel
2.8 Rugi-rugi Pada Motor Arus Searah
daya masukan ke motor diubah menjadi daya keluaran yang berguna, selalu ada energi yang hilang selama proses pengkonversian energi tersebut. Energi yang hilang tersebut ada yang dikonversikan menjadi panas dan ada yang diserap oleh mesin untuk mengatasi gesekan karena adanya bagian yang berputar di dalam mesin. Rugi-rugi daya dalam bentuk panas ini jika nilainya terlalu besar akan dapat menyebabkan kenaikan temperatur motor yang dapat merusak isolasi dan mempercepat berkurangnya umur ekonomis motor sehingga membatasi daya keluaran motor. Berikut ini proses pengkonversian energi pada motor arus searah dalam diagram aliran daya dapat dilihat pada Gambar 2.15 berikut ini:
Gambar 2.15 Diagram aliran daya pada motor arus searah
Dengan demikian selalu ada selisih antara daya masukan dan daya keluaran motor. Ini merupakan rugi-rugi daya yang terjadi di dalam motor. Dalam persamaan dinyatakan dengan :
ΣRugi-Rugi = Daya Masukan–Daya Keluaran...(2.21)
dapat dihasilkannya dimana selisih daya tersebut berubah menjadi bentuk energi yang lain yang tidak dapat digunakan bahkan dapat merugikan bagi motor itu sendiri.
Rugi-rugi daya yang terjadi pada motor arus searah dapat diklasifikasikan sebagai berikut :
1. Rugi-rugi tembaga (copper losses) 2. Rugi-rugi inti (core or iron losses) 3. Rugi-rugi sikat (brush losses)
4. Rugi-rugi mekanis (mechanical losses) 5. Rugi-rugi beban stray (stray load losses)
2.8.1 Rugi-rugi Tembaga(copper losses)
Rugi-rugi tembaga adalah rugi-rugi daya yang terjadi di dalam kumparan medan dan kumparan jangkar motor. Karena kawat tembaga kedua kumparan tersebut memiliki nilai resistansi Rfdan Ra, maka jika mengalir arus DC sebesar If dan Iaakan menyebabkan kerugian daya yang dihitung dengan persamaan :
Rugi-rugi jangkar : Pa = Ia2Ra...(2.22) Rugi-rugi medan : Pf = If2Rf...(2.23) Di mana :
Pa = Rugi-rugi jangkar (Watt) Pf = Rugi-rugi medan (Watt) Ia = Arus jangkar (A)
If = Arus Medan (A)
dianggap sebagai rugi-rugi di dalam inti jangkar dan disebut sebagai rugi hysteresis. Untuk menentukan besarnya rugi hysteresis di dalam inti jangkar digunakan persamaan Steinmentz yaitu :
Ph=ηB1max,6 fV Watt………...…...(2.24)
Dimana : Ph = rugi hysteresis
Bmax = rapat fluks maksimum di dalam jangkar
f = frekuensi pembalikan magnetik
=
120 P n
dimana n dalam rpm dan P = jumlah kutub
V = volume jangkar dalam m3 η = koefisien hysteresis Steinmentz
2). Rugi Arus Pusar
Sebagai tambahan terhadap tegangan yang diinduksikan di dalam konduktor jangkar, ada juga tegangan yang diinduksikan di dalam inti jangkar. Tegangan ini menghasilkan arus yang bersirkulasi di dalam inti jangkar seperti yang ditunjukkan dalam Gambar 2.17. Ini disebut sebagai arus pusar (eddy current) dan daya yang hilang karena alirannya disebut dengan rugi arus pusar.
komutator. Karena adanya suatu nilai koefisien gesek antara permukaan bagian-bagian tersebut, walaupun kecil, diperlukan gaya untuk mengimbangi gaya lawan akibat koefisien gesek tersebut jika ingin menggerakkan rotor motor arus searah tersebut.
Sedangkan rugi-rugi angin adalah rugi-rugi yang disebabkan oleh pergesekan antara bagian-bagian motor yang berputar dengan udara di dalam rumah (casing) motor. Baik itu pergesekan antara permukaan rotor dengan udara pada celah udara di dalam motor ataupun gesekan udara dengan kipas pendingin yang dipasangkan pada rotor di dalam motor. Rugi-rugi angin ini bervariasi tergantung pada kecepatan rotasi motor tersebut.
2.8.5 Rugi-rugi Beban Stray(stray load losses)
Rugi-rugi beban stray merupakan rugi-rugi yang disebabkan oleh arus pusar di dalam tembaga dan rugi-rugi inti tambahan di dalam besi, yang timbul karena pendistorsian fluks magnetik oleh arus beban (tidak termasuk yang disebabkan oleh jatuh tegangan IR) dan rugi-rugi hubung singkat komutasi.
Rugi-rugi beban stray ini tidak dapat dikategorikan ke dalam tipe rugi-rugi yang disebutkan di atas. Di dalam perhitungan rugi-rugi motorarus searah, besarnya rugi-rugi beban stray dinyatakan sebesar ± 1% dari beban penuh.
Rugi-rugi di dalam motor arus searah di atas juga dapat dikelompokkan menjadi dua kelompok yaitu :
1. Rugi-rugi konstan yaitu rugi-rugi di dalam motor arus searah yang nilainya selalu tetap, tidak tergantung pada arus pembebanan. Rugi–rugi inti + mekanis disebut dengan rugi–rugi rotasi.Yang termasuk ke dalam kelompok rugi-rugi konstan adalah :
a. Rugi-rugi inti yaitu rugi-rugi hysteresis dan arus pusar b. Rugi-rugi mekanis yaitu rugi-rugi gesek dan angin c. Rugi-rugi tembaga medan shunt.
2. Rugi-rugi variabel yaitu rugi-rugi di dalam motorarus searah yang nilainya bervariasi terhadap arus pembebanan.Yang termasuk ke dalam kelompok rugi-rugi ini adalah :
a. Rugi-rugi tembaga kumparan jangkar (Ia2Ra) b. Rugi-rugi tembaga kumparan medan seri (Ia2Rse) c. Rugi jatuh tegangan sikat (VbdIa)
Sehingga rugi-rugi total di dalam motor arus searah adalah :
BAB III
METODE PENELITIAN
3.1 Tempat dan Waktu Penelitian
Pengambilan data dalam penelitian tugas Akhir ini dilakukan di Laboratorium Konversi Energi Listrik FT-USU, pada tanggal 20 Februari 2014 pukul 15.00 s/d 18.00 WIB.
3.2 Metode Pengumpulan Data
Metode pengumpulan data dalam suatu penelitian akan sangat menentukan keberhasilan penelitian, oleh karena itu perlu direncanakan dengan tepat dalam memilih metode untuk pengumpulan data. Sedangkan metode-metode tersebut adalah sebagai berikut :
1. Metode Dokumentasi
Yang dimaksud metode dokumentasi adalah cara memperoleh data melalui hal-hal atau variabel yang berupa catatan, transkrip, buku, surat kabar, majalah dan lain-lain. Adapun dokumentasi yang akan peneliti gunakan adalah data-data yang berhubungan dengan arus, dan tegangan.
2. Metode Observasi
Energi Listrik dan mengadakan penelitian mengenai hal-hal yang perlu dicatat sebagai data dalam penelitian.
3.3 Langkah- Langkah Penelitian
Langkah-langkah penelitian yang ditempuh dalam penelitian ini meliputi :
1. Tahap Persiapan
Tujuan dari tahap persiapan penelitian adalah untuk mengkoordinasikan agar saat penelitian dapat berjalan dengan lancar. Langkah-langkah yang dilakukan adalah sebagai berikut :
a) Mempersiapkan alat dan bahan untuk penelitian, semua alat dan bahan yang akan
digunakan harus dipersiapkan terlebih dahulu.
b) Mengkondisikan obyek penelitian.
Obyek penelitian yang dimaksudkan disini adalah motor DC seri, motor DC shunt, dan kutub bantu. Adapun langkah mengkondisikan obyek penelitian ini meliputi:
1) Memastikan bahwa motor DC seri dan shunt dapat beroperasi dan melakukan
penambahan kutub bantu pada motor.
2) Memeriksa Power Supply dan Multimeter apakah sudah disetting dengan
benar.
c) Mengkondisikan alat ukur.
2. Tahap Pengambilan Data
Tujuan dari tahap ini untuk memperoleh data penelitian yang meliputi arus dan putaran terhadap arus medan.
3.4 Analisa Data
Analisa data merupakan bagian penting dalam penelitian, karena dengan analisis data yang diperoleh mampu memberikan arti dan makna untuk memecahkan masalah dan mengambil kesimpulan penelitian. Dalam penelitian ini teknik analisis data yang digunakan adalah analisis matematis untuk mendapatkan hasil penelitian. Analisis ini adalah mengadakan perhitungan-perhitungan berdasarkan rumus yang berlaku di dalam perhitungan rugi-rugi motor arus searah penguatan seri dan shunt.
Dari Hasil Pengujian Pada Kondisi Tanpa Beban Daya masukan motor pada kondisi tanpa beban adalah :
(Pin)o = Vtx IL
Pada kondisi tanpa beban, seluruh daya masukan pada motor digunakan untuk melayani rugi-rugi daya yang terdiri dari :
Rugi-rugi tembaga yaitu rugi-rugi tembaga pada kumparan jangkar, pada kumparan medan seri, dan pada kumparan medan shunt.
Rugi-rugi tembaga pada motor arus searah penguatan seri : (Pcu-total)o = Ia2( Ra+ Rs)
Rugi-rugi konstan yaitu rugi-rugi besi serta rugi-rugi gesekan dan angin : Pkonstan = (Pin)o–(Pcu-total)o
Dari Hasil Pengujian Pada Kondisi Berbeban
Daya masukan motor pada kondisi berbeban adalah : Pin = Vtx IL
Pada kondisi berbeban, daya masukan motor digunakan untuk melayani beban dan juga rugi-rugi daya. Rugi-rugi daya pada saat motor dibebani adalah : Rugi-rugi tembaga pada motor arus searah penguatan seri :
Pcu-total = Ia2( Ra+ Rs)
Rugi-rugi tembaga pada motor arus searah penguatan shunt : Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh
Rugi-rugi total pada motor :
ΣRugi-Rugi = Pcu-total+ Pkonstan
Sehingga daya keluaran motor yang digunakan untuk melayani beban adalah : Pout = Pin– ΣRugi-Rugi
3.5 Peralatan Yang Digunakan
Penelitian mengenai pengaruh penambahan kutub bantu pada motor arus searah penguatan seri dan shunt untuk memperkecil rugi-rugi ini dilakukan pada Laboratorium Konversi Energi Listrik FT-USU. Peralatan-peralatan yang digunakan pada penelitian ini adalah sebagai berikut :
3. Power Supply yang terdiri dari 2 unit PTDC 4. 2 unit Tahanan Geser
5. 2 buah Voltmeter 6. 6 buah Amperemeter 7. 1 buah Tachometer 8. Kabel Penghubung
3.6 Rangkaian Pengujian
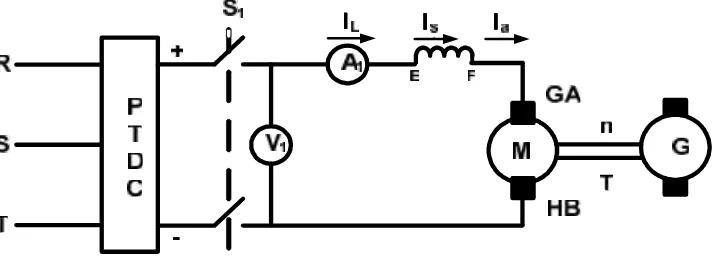
3.6.1 Rangkaian Pengujian Motor DC Penguatan Seri Pada Kondisi Tanpa Beban
[image:55.595.136.493.404.535.2]a. Untuk motor DC penguatan seri tanpa kutub bantu
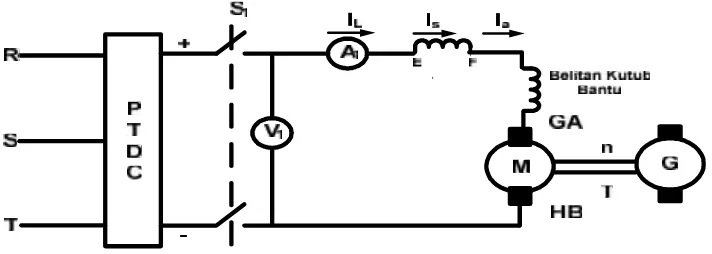
b. Untuk motor DC penguatan seri dengan kutub bantu
Gambar 3.2 Rangkaian pengujian motor DC penguatan seri pada kondisi tanpa beban dengan kutub bantu
3.6.2 Rangkaian Pengujian Motor DC Penguatan Seri Pada Kondisi Berbeban
a. Untuk motor DC penguatan seri tanpa kutub bantu
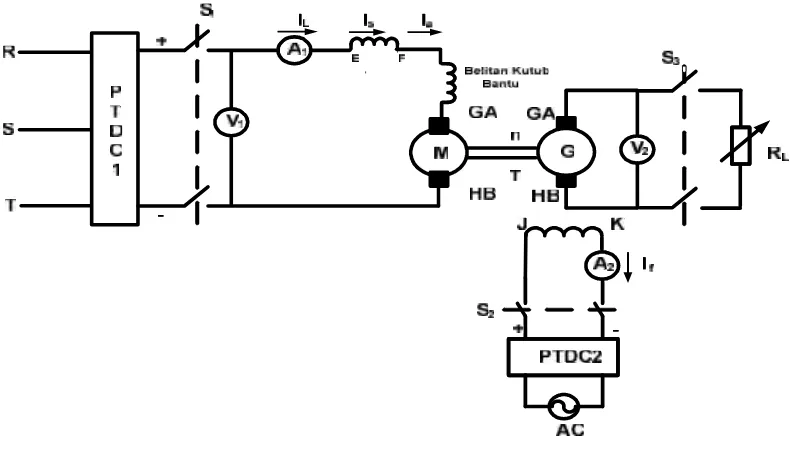
[image:56.595.115.510.409.639.2]b. Untuk motor DC penguatan seri dengan kutub bantu
Gambar 3.4 Rangkaian pengujian motor DC penguatan seri pada kondisi berbeban dengan kutub bantu
3.6.3 Rangkaian Pengujian Motor DC Penguatan Shunt Pada Kondisi Tanpa Beban
[image:57.595.115.510.113.340.2]a. Untuk motor DC penguatan shunt tanpa kutub bantu
b. Untuk motor DC penguatan shunt dengan kutub bantu
Gambar 3.6 Rangkaian pengujian motor DC penguatan shunt pada kondisi tanpa beban dengan kutub bantu
3.6.4 Rangkaian Pengujian Motor DC Penguatan Shunt Pada Kondisi Berbeban
a. Untuk motor DC penguatan shunt tanpa kutub bantu
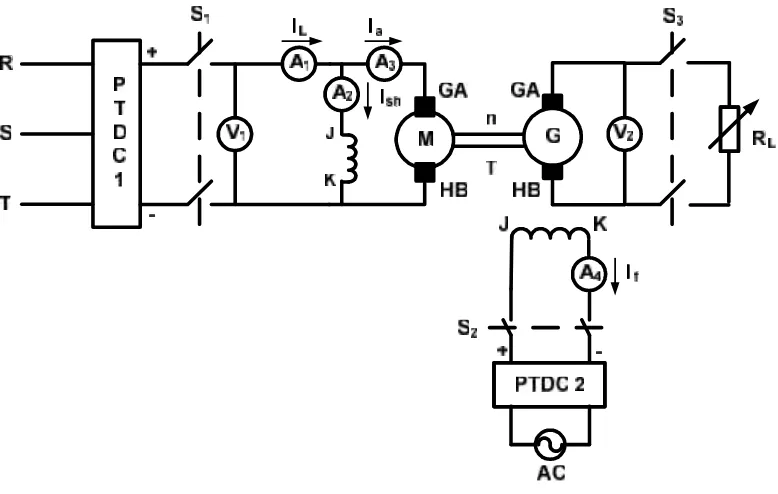
b. Untuk motor DC penguatan shunt dengan kutub bantu
Gambar 3.8 Rangkaian pengujian motor DC penguatan shunt pada kondisi berbeban dengan kutub bantu
3.7 Prosedur Pengujian
3.7.1 Prosedur Pengujian Motor DC Penguatan Seri Dan Shunt Pada Kondisi Tanpa Beban
1. Untuk pengujian motor DC penguatan seri dan shunt tanpa kutub bantu, rangkaian pengujian dibuat seperti Gambar 3.1 dan 3.5, sedangkan untuk pengujian motor DC penguatan seri dan shunt dengan kutub bantu, rangkaian pengujian dibuat seperti Gambar 3.2 dan 3.6.
3. Pada saat itu dicatat nilai ILpada pembacaan A1, Ishpada pembacaan A2, Ia pada pembacaan A3serta n pada pembacaan tachometer.
4. Setelah itu tegangan terminal motor diturunkan dengan menurunkan PTDC sampai minimum sehingga motor berhenti berputar.
5. Kemudian saklar S1 dibuka, percobaan selesai.
3.7.2 Prosedur Pengujian Motor DC Penguatan Seri Dan Shunt Pada Kondisi Berbeban
1. Untuk pengujian motor DC penguatan seri dan shunt tanpa kutub bantu, rangkaian pengujian dibuat seperti Gambar 3.3 dan 3.7, sedangkan untuk pengujian motor DC penguatan seri dan shunt dengan kutub bantu, rangkaian pengujian dibuat seperti Gambar 3.4 dan 3.8.
2. Saklar S2 ditutup, kemudian arus medan (If) generator dinaikkan dengan menaikkan PTDC 2 sampai pembacaan A4 mencapai arus medan nominal generator yaitu 0,4 Ampere.
3. Saklar S1 ditutup, kemudian tegangan terminal motor dinaikkan secara perlahan dengan menaikkan PTDC 1 sampai pembacaan V1mencapai nilai tegangan 65 Volt sehingga motor berputar.
5. Setelah itu arus medan (If) generator diturunkan dengan menurunkan PTDC 2 sampai minimum.
6. Kemudian tegangan terminal motor diturunkan dengan menurunkan PTDC 1 hingga posisi nol.
BAB IV
HASIL DAN PEMBAHASAN
4.1 Umum
Pada saat motor arus searah dibebani maka pada kumparan jangkar akan mengalir arus jangkar. Arus ini akan menimbulkan fluksi jangkar yang akan berinteraksi dengan fluksi yang akan dihasilkan kuparan medan motor. Akibatnya akan terjadi perubahan bentuk gelombang fluksi utama. Pengaruh reaksi jangkar akan menyebabkan terjadinya percikan bunga api pada sikat-sikat motor. Hal ini akan mempengaruhi kinerja dari motor arus searah tersebut.
Untuk mengatasi masalah ini, maka salah satu caranya adalah dengan menambahkan kutub bantu pada motor arus searah. Pada tulisan ini akan dibahas pengaruh penambahan kutub bantu pada motor arus searah untuk memperkecil rugi-rugi.
4.2 Hasil Penelitian
[image:63.595.139.481.248.323.2]Penelitian dilakukan pada tanggal 20 Februari 2014 di Laboratorium Konversi Energi Listrik, diperoleh data pengujian sebagai berikut :
Tabel 4.1Data Hasil Pengujian Motor DC Penguatan Seri Tanpa Beban Dan Tanpa Kutub Bantu
V = 65 Volt
(volt) (ampere) (rpm)
[image:63.595.135.483.405.471.2]65 3,45 2450
Tabel 4.2Data Hasil Pengujian Motor DC Penguatan Seri Tanpa Beban Dan Berkutub Bantu
V = 65 Volt
(volt) (ampere) (rpm)
65 2,05 1800
Tabel 4.3Data Hasil Pengujian Motor DC Penguatan Seri Berbeban Dan Tanpa Kutub Bantu
V = 65 Volt = 0,4 Ampere
(ohm) (ampere) (rpm)
100 6,05 1070
90 6,10 1050
80 6,34 1000
70 6,56 960
60 6,77 920
[image:63.595.144.481.524.743.2]Tabel 4.4Data Hasil Pengujian Motor DC Penguatan Seri Berbeban Dan Berkutub Bantu
V = 65 Volt = 0,4 Ampere
(ohm) (ampere) (rpm)
100 4,74 650
90 4,79 620
80 4,90 550
70 5,09 510
60 5,16 470
[image:64.595.122.502.415.489.2]50 5,55 440
Tabel 4.5Data Hasil Pengujian Motor DC Penguatan Shunt Tanpa Beban Dan Tanpa Kutub Bantu
V = 65 Volt
(ampere) (ampere) (ampere) (rpm)
3,30 0,05 3,25 1500
Tabel 4.6Data Hasil Pengujian Motor DC Penguatan Shunt Tanpa Beban Dan Berkutub Bantu
V = 65 Volt
(ampere) (ampere) (ampere) (rpm)
[image:64.595.127.501.565.643.2]Tabel 4.7Data Hasil Pengujian Motor DC Penguatan Shunt Berbeban Dan Tanpa Kutub Bantu
V = 65 Volt = 0,4 Ampere
(ohm) (ampere) (ampere) (ampere) (rpm)
100 4,96 0,05 4,91 1000
90 5,28 0,05 5,23 980
80 5,38 0,05 5,33 960
70 5,58 0,05 5,53 940
60 5,89 0,05 5,84 860
50 6,30 0,05 6,25 800
Tabel 4.8Data Hasil Pengujian Motor DC Penguatan Shunt Berbeban Dan Berkutub Bantu
V = 65 Volt = 0,4 Ampere
(ohm) (ampere) (ampere) (ampere) (rpm)
100 3,51 0,05 3,46 690
90 3,84 0,05 3,79 670
80 3,87 0,05 3,82 650
70 3,92 0,05 3,87 630
60 3,98 0,05 3,93 600
50 4,19 0,05 4,14 550
4.3 Analisa Data
[image:65.595.118.509.408.601.2]penguatan seri dan motor arus searah penguatan shunt pada kondisi tanpa kutub bantu dan berkutub bantu.
= 0.40 Ampere Tahanan Jangkar GA-HB = 3.80
V = 65 Volt Tahanan Medan Shunt (J-K) = 1,25 k
Tahanan Kutub Bantu (Rkb) = 2 Tahanan Seri E-F = 0.60
a. Untuk Motor DC Penguatan Seri 1) Tanpa Kutub Bantu
Pada Kondisi Tanpa Beban (Pin)o = Vtx IL
= 65 x 3,45 (Pin)o = 224, 250 Watt
(Pcu-total)o = ( Ia)2x (Ra+ Rs) = (3,45)2x (3,8 + 0,6) (Pcu-total)o = 52,371 Watt
Pkonstan = (Pin)o–(Pcu-total)o = 224,25–52,371 Pkonstan = 171,879 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
Pada Kondisi Berbeban
1. Pada Saat Beban (RL) = 100 Ohm Pin = Vtx IL
= 65 x 6,05 Pin = 393,250 Watt
Pcu-total = ( Ia)2x (Ra+ Rs) = (6,05)2x (3,8 + 0,6) Pcu-total = 161,051 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 161,051 + 171,879 = 332,930 Watt
Pout = Pin– ΣRugi-Rugi = 393,250 –332,930 Pout = 60,320 Watt
2. Pada Saat Beban (RL) = 90 Ohm Pin = Vtx IL
= 65 x 6,10 Pin = 396,50 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 163,724 + 171,879 = 335,603 Watt
Pout = Pin– ΣRugi-Rugi = 396,50 –335,603 Pout = 60,897 Watt
3. Pada Saat Beban (RL) = 80 Ohm Pin = Vtx IL
= 65 x 6,34 Pin = 412,10 Watt
Pcu-total = ( Ia)2x (Ra+ Rs) = (6,34)2x (3,8 + 0,6) Pcu-total = 176,860 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 176,860 + 171,879 = 348,739 Watt
4. Pada Saat Beban (RL) = 70 Ohm Pin = Vtx IL
= 65 x 6,56 Pin = 426,40 Watt
Pcu-total = ( Ia)2x (Ra+ Rs) = (6,56)2x (3,8 + 0,6) Pcu-total = 189,347 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 189,347 + 171,879 = 361,226 Watt
Pout = Pin– ΣRugi-Rugi = 426,40 –361,226 Pout = 65,174 Watt
5. Pada Saat Beban (RL) = 60 Ohm Pin = Vtx IL
= 65 x 6,77 Pin = 440,050 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 201,664 + 171,879 = 373,543 Watt
Pout = Pin– ΣRugi-Rugi = 440,050 –373,543 Pout = 66,507 Watt
6. Pada Saat Beban (RL) = 50 Ohm Pin = Vtx IL
= 65 x 6,96 Pin = 452,40 Watt
Pcu-total = ( Ia)2x (Ra+ Rs) = (6,96)2x (3,8 + 0,6) Pcu-total = 213,143 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 213,143 + 171,879 = 385,022 Watt
2) Dengan Kutub Bantu
Pada Kondisi Tanpa Beban (Pin)o = Vtx IL
= 65 x 2,05 (Pin)o = 133,250 Watt
(Pcu-total)o = ( Ia)2x (Ra+ Rs+ Rkb) = (2,05)2x (3,8 + 0,6 + 2) (Pcu-total)o = 26,896 Watt
Pkonstan = (Pin)o–(Pcu-total)o = 133,25–26,896 Pkonstan = 106,354 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 26,896 + 106,354 = 133,250 Watt
Pada Kondisi Berbeban
1. Pada Saat Beban (RL) = 100 Ohm Pin = Vtx IL
= 65 x 4,74 Pin = 308,10 Watt
Pcu-total = 143,792 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 143,792 + 106,354 = 250,146 Watt
Pout = Pin– ΣRugi-Rugi = 308,10 –250,146 Pout = 57,954 Watt
2. Pada Saat Beban (RL) = 90 Ohm Pin = Vtx IL
= 65 x 4,79 Pin = 311,350 Watt
Pcu-total = ( Ia)2x (Ra+ Rs+ Rkb) = (4,79)2x (3,8 + 0,6 + 2) Pcu-total = 146,842 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 146,842 + 106,354 = 253,196 Watt
3. Pada Saat Beban (RL) = 80 Ohm Pin = Vtx IL
= 65 x 4,90 Pin = 318,50 Watt
Pcu-total = ( Ia)2x (Ra+ Rs+ Rkb) = (4,90)2x (3,8 + 0,6 + 2) Pcu-total = 153,664 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 153,664 + 106,354 = 260,018 Watt
Pout = Pin– ΣRugi-Rugi = 318,50 –260,018 Pout = 58,482 Watt
4. Pada Saat Beban (RL) = 70 Ohm Pin = Vtx IL
= 65 x 5,09 Pin = 330,850 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 165,811 + 106,354 = 272,165 Watt
Pout = Pin– ΣRugi-Rugi = 330,850 –272,165 Pout = 58,685 Watt
5. Pada Saat Beban (RL) = 60 Ohm Pin = Vtx IL
= 65 x 5,16 Pin = 335,40 Watt
Pcu-total = ( Ia)2x (Ra+ Rs+ Rkb) = (5,16)2x (3,8 + 0,6 + 2) Pcu-total = 170,403 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 170,403 + 106,354 = 276,757 Watt
6. Pada Saat Beban (RL) = 50 Ohm Pin = Vtx IL
= 65 x 5,55 Pin = 360,750 Watt
Pcu-total = ( Ia)2x (Ra+ Rs+ Rkb) = (5,55)2x (3,8 + 0,6 + 2) Pcu-total = 197,136 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 197,136 + 106,354 = 303,490 Watt
Dari hasil analisis data yang diperoleh daya input, rugi-rugi daya dan daya output motor DC penguatan seri dapat dilihat pada Tabel 4.9 dan Tabel 4.10 berikut :
Tabel 4.9 Hasil analisis data pengujian motor DC penguatan seri tanpa kutub bantu
(ohm) (A) (rpm) Pin(W) Σ
Rugi-Rugi
(W) Pout(W)
100 6,05 1070 393,250 332,930 60,320
90 6,10 1050 396,50 335,603 60,897
80 6,34 1000 412,10 348,739 63,361
70 6,56 960 426,40 361,226 65,174
60 6,77 920 440,050 373,543 66,507
50 6,96 850 452,40 385,022 67,378
Tabel 4.10 Hasil analisis data pengujian motor DC penguatan seri dengan kutub bantu
(ohm) (A) (rpm) Pin(W) Σ
Rugi-Rugi
(W) Pout(W)
100 4,74 650 308,10 250,146 57,954
90 4,79 620 311,350 253,196 58,154
80 4,90 550 318,50 260,018 58,482
70 5,09 510 330,850 272,165 58,685
60 5,16 470 335,40 276,757 58,643
[image:76.595.124.501.476.647.2]b. Untuk Motor DC Penguatan Shunt 1) Tanpa Kutub Bantu
Pada Kondisi Tanpa Beban (Pin)o = Vtx IL
= 65 x 3,30 (Pin)o = 214,50 Watt
(Pcu-total)o = ( Ia)2x Ra+ ( Ish)2x Rsh = (3,25)2x 3,8 + (0,05)2x 1250 = 40,137 + 3,125
(Pcu-total)o = 43,262 Watt
Pkonstan = (Pin)o–(Pcu-total)o = 214,50–43,262 Pkonstan = 171,238 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 43,262 + 171,238 = 214,50 Watt
Pada Kondisi Berbeban
1. Pada Saat Beban (RL) = 100 Ohm Pin = Vtx IL
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh = (4,91)2x 3,8 + (0,05)2x 1250 = 91,610 + 3,125
Pcu-total = 94,735 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 94,735 + 171,238 = 265,973 Watt
Pout = Pin– ΣRugi-Rugi = 322,40 –265,937 Pout = 56,427 Watt
2. Pada Saat Beban (RL) = 90 Ohm Pin = Vtx IL
= 65 x 5,28 Pin = 343,20 Watt
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh = (5,23)2x 3,8 + (0,05)2x 1250 = 103,941 + 3,125
Pcu-total = 107,066 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
Pout = Pin– ΣRugi-Rugi = 343,20 –278,304 Pout = 64,896 Watt
3. Pada Saat Beban (RL) = 80 Ohm Pin = Vtx IL
= 65 x 5,38 Pin = 349,70 Watt
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh = (5,33)2x 3,8 + (0,05)2x 1250 = 107,953 + 3,125
Pcu-total = 111,078 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 111,078 + 171,238 = 282,316 Watt
Pout = Pin– ΣRugi-Rugi = 349,70 –282,316 Pout = 67,384 Watt
4. Pada Saat Beban (RL) = 70 Ohm Pin = Vtx IL
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh = (5,53)2x 3,8 + (0,05)2x 1250 = 116,207 + 3,125
Pcu-total = 119,332 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 119,332 + 171,238 = 290,570 Watt
Pout = Pin– ΣRugi-Rugi = 362,70 –290,570 Pout = 72,130 Watt
5. Pada Saat Beban (RL) = 60 Ohm Pin = Vtx IL
= 65 x 5,89 Pin = 382,85 Watt
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh = (5,84)2x 3,8 + (0,05)2x 1250 = 129,601 + 3,125
Pcu-total = 132,726 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
Pout = Pin– ΣRugi-Rugi = 382,85 –303,964 Pout = 78,886 Watt
6. Pada Saat Beban (RL) = 50 Ohm Pin = Vtx IL
= 65 x 6,30 Pin = 409,50 Watt
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh = (6,25)2x 3,8 + (0,05)2x 1250 = 148,437 + 3,125
Pcu-total = 145,312 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 145,437 + 171,238 = 316,675 Watt
Pout = Pin– ΣRugi-Rugi = 409,50 –316,675 Pout = 92,825 Watt
2) Dengan Kutub Bantu
Pada Kondisi Tanpa Beban (Pin)o = Vtx IL
(Pin)o = 123,50 Watt
(Pcu-total)o = ( Ia)2x Ra+ ( Ish)2x Rsh+ ( Ia)2x Rkb = (1,85)2x 3,8 + (0,05)2x 1250 + (1,85)2x 2 = 13,005 + 3,125 + 6,845
(Pcu-total)o = 22,975 Watt
Pkonstan = (Pin)o–(Pcu-total)o = 123,50–22,975 Pkonstan = 100,525 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 22,975 + 100,525 = 123,50 Watt
Pada Kondisi Berbeban
1. Pada Saat Beban (RL) = 100 Ohm Pin = Vtx IL
= 65 x 3,51 Pin = 228,150 Watt
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh+ ( Ia)2x Rkb = (3,46)2x 3,8 + (0,05)2x 1250 + (3,46)2x 2 = 45,492 + 3,125 + 23,943
ΣRugi-Rugi = Pcu-total + Pkonstan
= 72,560 + 100,525 = 173,085 Watt
Pout = Pin– ΣRugi-Rugi = 228,150 –173,085 Pout = 55,065 Watt
2. Pada Saat Beban (RL) = 90 Ohm Pin = Vtx IL
= 65 x 3,84 Pin = 249,60 Watt
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh+ ( Ia)2x Rkb = (3,79)2x 3,8 + (0,05)2x 1250 + (3,79)2x 2 = 54,583 + 3,125 + 28,728
Pcu-total = 86,436 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 86,436 + 100,525 = 186,961 Watt
3. Pada Saat Beban (RL) = 80 Ohm Pin = Vtx IL
= 65 x 3,87 Pin = 251,550 Watt
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh+ ( Ia)2x Rkb = (3,82)2x 3,8 + (0,05)2x 1250 + (3,82)2x 2 = 55,451 + 3,125 + 29,184
Pcu-total = 87,760 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 87,760 + 100,525 = 188,285 Watt
Pout = Pin– ΣRugi-Rugi = 251,550 –188,285 Pout = 63,265 Watt
4. Pada Saat Beban (RL) = 70 Ohm Pin = Vtx IL
= 65 x 3,92 Pin = 254,80 Watt
Pcu-total = 89,990 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 89,990 + 100,525 = 190,515 Watt
Pout = Pin– ΣRugi-Rugi = 254,80 –190,515 Pout = 64,285 Watt
5. Pada Saat Beban (RL) = 60 Ohm Pin = Vtx IL
= 65 x 3,98 Pin = 258,70 Watt
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh+ ( Ia)2x Rkb = (3,93)2x 3,8 + (0,05)2x 1250 + (3,93)2x 2 = 58,690 + 3,125 + 30,889
Pcu-total = 92,704 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 92,704 + 100,525 = 193,229 Watt
6. Pada Saat Beban (RL) = 50 Ohm Pin = Vtx IL
= 65 x 4,19 Pin = 272,350 Watt
Pcu-total = ( Ia)2x Ra+ ( Ish)2x Rsh+ ( Ia)2x Rkb = (4,14)2x 3,8 + (0,05)2x 1250 + (4,14)2x 2 = 65,130 + 3,125 + 34,279
Pcu-total = 102,534 Watt
ΣRugi-Rugi = Pcu-total + Pkonstan
= 102,534 + 100,525 = 203,059 Watt
Dari hasil analisis data yang diperoleh daya input, rugi-rugi daya dan daya output motor DC penguatan shunt dapat dilihat pada Tabel 4.11 dan Tabel 4.12 berikut :
Tabel 4.11 Hasil analisis data pengujian motor DC penguatan shunt tanpa kutub bantu
(ohm) (A) (A) (A) (rpm) Pin(W)
Σ
Rugi-Rugi (W)
Pout (W)
100 4,96 0,05 4,91 1000 322,40 265,973 56,427
90 5,28 0,05 5,23 980 343,20 278,304 64,896
80 5,38 0,05 5,33 960 349,70 282,316 67,384
70 5,58 0,05 5,53 940 362,70 290,570 72,130
60 5,89 0,05 5,84 860 382,85 303,964 78,886
50 6,30 0,05 6,25 800 409,50 316,675 92,825
Tabel 4.12 Hasil analisis data pengujian motor DC penguatan shunt dengan kutub bantu
(ohm) (A) (A) (A) (rpm) Pin(W)
Σ
Rugi-Rugi (W)
Pout(W)
100 3,51 0,05 3,46 690 228,150 173,085 55,065
90 3,84 0,05 3,79 670 249,60 186,961 62,639
80 3,87 0,05 3,82 650 251,550 188,285 63,265
70 3,92 0,05 3,87 630 254,80 190,515 64,285
60 3,98 0,05 3,93 600 258,70 193,229 65,471
[image:87.595.97.521.468.656.2]452.4 440.05
426.4 412.1
396.5 393.25 360.75
335.4 330.85 318.5 311.35
308.1 0 100 200 300 400 500
50 60 70 80 90 100
[image:88.595.114.556.179.372.2] [image:88.595.114.557.447.704.2]P
in
(
W
a
tt
)
RL (Ohm)
Grafik RL Vs Pin
Tanpa Kutub Bantu Dengan Kutub Bantu 385.022 373.543 361.226 348.739 335.603 332.93 303.49
276.757 272.165 260.018
253.196 250.146 0 50 100 150 200 250 300 350 400 450
50 60 70 80 90 100
R
u
g
i-R
u
g
i
(W
a
tt
)
RL (Ohm)
Grafik RL Vs
Rugi-Rugi
Tanpa Kutub Bantu
67.378 66.507 65.174 63.361 60.897 60.32 57.26
58.643 58.685 58.482 58.154 57.954
52 54 56 58 60 62 64 66 68 70
50 60 70 80 90 100
[image:89.595.114.554.142.358.2] [image:89.595.113.557.401.690.2]P
o
u
t
(W
a
tt
)
RL (Ohm)
Grafik RL Vs Pout
Tanpa Kutub Bantu Dengan Kutub Bantu 409.5 382.85 362.7 349.7 343.2 322.4 272.35 258.7 254.8
251.55 249.6 228.15 0 50 100 150 200 250 300 350 400 450
50 60 70 80 90 100
P
in
(
W
a
tt
)
RL (Ohm)
Grafik RL Vs Pin
316.675
303.964 290.57
282.316 278.304 265.973
203.059 193.229 190.515
188.285 186.961 173.085 0 50 100 150 200 250 300 350
50 60 70 80 90 100
[image:90.595.114.560.155.374.2] [image:90.595.113.557.495.722.2]R
u
g
i-R
u
g
i
(W
a
tt
)
RL (Ohm)
Grafik RL Vs
Rugi-Rugi
Tanpa Kutub Bantu Dengan Kutub Bantu 92.825 78.886 72.13 67.384 64.896 56.427 69.291 65.471
64.285 63.265 62.639
55.065 0 10 20 30 40 50 60 70 80 90 100
50 60 70 80 90 100
P
o
u
t
(W
a
tt
)
RL (Ohm)
Grafik RL Vs Pout
BAB V
PENUTUP
5.1 Kesimpulan
Berdasarkan uraian dan penelitian yang dilakukan, maka dapat diperoleh kesimpulan sebagai berikut:
1. Pada saat motor DC penguatan seri dan shunt diberi beban sebesar 50 ohm, putaran motor yang menggunakan kutub bantu lebih kecil yaitu sebesar 440 rpm dan 550 rpm dibandingkan putaran motor tanpa kutub bantu yaitu sebesar 850 rpm dan 800 rpm.
2. Pada saat motor DC penguatan seri dan shunt diberi beban sebesar 50 ohm, arus jangkar yang mengalir pada motor yang menggunakan kutub bantu lebih kecil yaitu sebesar 5,55 A dan 4,14 A dibandingkan arus jangkar yang mengalir pada motor tanpa kutub bantu yaitu sebesar 6,96 A dan 6,25 A.
3. Pada saat motor DC penguatan seri dan shunt diberi beban sebesar 50 ohm, daya input motor yang menggunakan kutub bantu lebih kecil yaitu sebesar 360,750 W dan 272,350 W dibandingkan daya input motor tanpa kutub bantu yaitu sebesar 452,40 W dan 409,50 W.
5. Pada saat motor DC penguatan seri dan shunt diberi beban sebesar 50 ohm, daya output motor yang menggunakan kutub bantu lebih kecil yaitu sebesar 57,260 W dan 69,291 W dibandingkan daya output motor tanpa kutub bantu yaitu sebesar 67,378 W dan 92,825 W.
5.2 Saran
Adapun beberapa saran yang bisa diberikan dari hasil tugas akhir ini adalah:
1. Dalam melakukan pengujian di laboratorium hendaknya dilakukan beberapa kali percobaan, agar data yang diperoleh lebih akurat.
DAFTAR PUSTAKA
1. Lister, Eugene C, Mesin dan Rangkaian Listrik, Edisi ke-6, Penerbit Erlangga, Jakarta : 1986
2. Mehta , V.K. and Rohit Mehta, Principles of Electrical En