ANALISIS PENGARUH JATUH TEGANGAN TERHADAP
KINERJA MOTOR ARUS SEARAH KOMPON
Diajukan untuk memenuhi salah satu persyaratan dalam menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro Sub Jurusan Energi
Listrik
Oleh:
IRPAN ROSIDI TANJUNG NIM : 080402113
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
ANALISIS PENGARUH JATUH TEGANGAN TERHADAP
KINERJA MOTOR ARUS SEARAH KOMPON
Oleh:
IRPAN ROSIDI TANJUNG NIM : 080402113
Disetujui oleh: Pembimbing,
Ir. SURYA TARMIZI KASIM, M.Si NIP. 19540531 198601 1 002
Diketahui oleh:
Ketua Departemen Teknik Elektro FT USU,
Ir. SURYA TARMIZI KASIM, M.Si NIP. 19540531 198601 1 002
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
i ABSTRAK
Listrik merupakan salah satu kebutuhan yang sangat penting dan dibutuhkan oleh semua lapisan masyarakat. Listrik dipergunakan untuk kepentingan penerangan, menunjang proses produksi pada pabrik-pabrik seperti pengoperasian motor DC. Pengoperasian motor DC diharapkan dapat beroperasi secara normal sesuai dengan karakteristik kerja yang dikehendaki, namun tidak dapat dipungkiri adanya gangguan yang dapat menimbulkan kerusakan terhadap system kerja motor, salah satunya adalah jatuh tegangan jala-jala.
Turunnya tegangan supply pada motor selain mempengaruhi kinerja motor. Motor arus searah kompon banyak digunakan sebagai penggerak pada dunia industri,oleh karena itu perlu penelitian ini dilakukan untuk mengetahui jenis motor arus searah penguatan kompon yang terbaik. Dari hasil penelitaian didapatkan hasil bahwa motor arus searah kompon panjang memiliki jatuh putaran yang tidak terlalu jauh akibat jatuh tegangan torsi dan putaran tertinggi pada motor arus searah kompon panjang diperoleh pada saat tegangan terminal bernilai 220 Volt yaitu sebesar 0,107 N-m dan 1450 rpm sedangkan torsi dan putaran terendah diperoleh pada saat tegangan terminal bernilai 190 Volt yaitu sebesar 0,0820 N-m dan 1270 rpm sedangakan torsi dan putaran tertinggi pada motor arus searah kompon pendek diperoleh pada saat tegangan terminal bernilai 220 Volt yaitu sebesar 0,106 N-m dan 1480 rpm sedangkan torsi dan putaran terendah diperoleh pada saat tegangan terminal bernilai 190 Volt yaitu sebesar 0,0975 N-m dan 1250 rpm.
ii
KATA PENGANTAR
Segala puji dan syukur penulis panjatkan kehadirat Allah SWT, karena atas berkat rahmat dan ridho-Nya tugas akhir ini dapat disusun dan diselesaikan, serta shalawat beriring salam penulis haturkan kepada junjungan Nabi Besar Muhammad SAW.
Tugas akhir ini adalah bagian dari kurikulum yang harus diselesaikan untuk memenuhi persyaratan menyelesaikan pendidikan Sarjana Strata Satu di Departemen Teknik Elektro, Universitas Sumatera Utara. Adapun judul tugas akhir ini adalah:
”ANALISIS PENGARUH JATUH TEGANGAN TERHADAP
KINERJA MOTOR ARUS SEARAH KOMPON ”
Tugas akhir ini penulis persembahkan kepada yang teristimewa yaitu Ayahanda (H.Syarifuddin Tanjung) dan Ibu (Hj.Suhro Nasution) yang selalu memberikan semangat dan mendoakan penulis dalam penyelesaian studi hingga menyelesaikan tugas akhir ini.
Selama masa kuliah hingga penyelesaian tugas akhir ini, penulis juga banyak mendapat dukungan, bimbingan, maupun bantuan dari berbagai pihak. Untuk itu penulis ingin menyampaikan rasa terima kasih yang sebesar-besarnya kepada:
iii
pikirannya untuk memberikan bantuan, bimbingan, dan pengarahan kepada penulis selama perkuliahan hingga penyusunan tugas akhir ini. 2. Seluruh Bapak dan Ibu dosen yang telah mendidik penulis menuju
jenjang Sarjana.
3. Seluruh staf pegawai Departemen Teknik Elektro FT USU yang telah membantu penulis dalam pengurusan administrasi.
4. M Ardiansyah ST, Bambang Hidayat ST, M.Arfan Saputra S, .Asri Akbar, Syahrizal Lubis ST, Tondy Zulfadly R ST, Saddam Akil Harahap, Ray Pramana Putra NST, dan Kawan Stambuk 08 dan 09 lain nya.
5. Seluruh abang dan kakak senior serta adik-adik junior yang telah memberi dukungan dan bantuan.
6. Semua pihak yang tidak dapat penulis sebutkan satu persatu.
Penulis menyadari bahwa tugas akhir ini belum sempurna karena masih banyak terdapat kekurangan baik dari segi isi maupun susunan bahasanya. Saran dan kritik dari pembaca dengan tujuan menyempurnakan dan mengembangkan kajian dalam bidang ini sangat penulis harapkan. Akhir kata, penulis berharap semoga penulisan tugas akhir ini dapat berguna memberikan ilmu pengetahuan bagi kita semua dan hanya kepada Allah SWT-lah penulis menyerahkan diri.
Penulis
Medan, November 2014 Penulis
iv DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... iii
DAFTAR GAMBAR ... v
BAB I. PENDAHULUAN 1.1 LATAR BELAKANG ... 1
1.2 TUJUAN DAN MANFAAT PENULISAN ... 2
1.3 BATASAN MASALAH ... 2
1.4 METODE PENELITIAN ... 3
1.5 SISTEMATIKA PENULISAN …. ... 5
BAB II. MOTOR ARUS SEARAH 2.1 UMUM ... 5
2.2 KONSTRUKSI MOTOR ARUS SEARAH ... 6
2.3 PRINSIP KERJA MOTOR ARUS SEARAH ... 9
2.4 REAKSI JANGKAR ... 14
2.5 JENIS-JENIS MOTOR ARUS SEARAH ... 18
2.6 GAYA GERAK LISTRIK ... 25
2.7 KARATERISTIK MOTOR ARUS SEARAH KOMPON ... 27
2.8 JATUH TEGANGAN ... 31
2.9 TORSI MOTOR ARUS SEARAH ... 33
2.10 PENGATURAN KECEPATAN MOTOR ARUS SEARAH ... 34
v
2.12 PENGARUH TURUNNYA TEGANGAN TERHADAP KINERJA
MOTOR ... 35
BAB III. METODE PENELITIAN 3.1 METODE PENELITIAN ... 37
3.2 MOTODE PENGUMPULAN DATA ... 37
3.3 LANGKAH-LANGKAH PENELITIAN ... 38
3.4 PERALATAN YANG DIGUNAKAN ... 38
3.5 RANGKAIAN PENGAMBILAN DATA ... 40
3.6 PROSEDUR ... 41
BAB IV. ANILISIS PENGARUH JATUH TEGANGAN TERHADAP KINERJA MOTOR ARUS SEARAH KOMPON 4.1 PENGARUH JATUH TEGANGAN TERHADAP KINERJA MOTOR ARUS SEARAH KOMPON ... 44
4.2 HASIL PENELITAN ... 44
4.3 ANALISA DATA PENGUJIAN ... 46
4.4 GRAFIK PENGUJIAN ... 55
BAB V. KESIMPULAN DAN SARAN 5.1 KESIMPULAN ... 58
5.2 SARAN ... 58
vi
DAFTAR GAMBAR
Gambar 2.1 konstruksi motor arus searah bagian stator ... 6
Gambar 2.2 konstruksi motor arus searah bagian rotor ... 6
Gambar 2.3 Pengaruh penempatan konduktor berarus dalam medan magnet ... 10
Gambar 2.4 Prinsip perputaran motor arus searah ... 11
Gambar 2.5 Fluksi yang dihasilkan oleh kumparan medan ... 14
Gambar 2.6 Fluksi yang dihasilkan oleh Kumparan jangkar ... 15
Gambar 2.7 Hasil kombinasi antara fluksi medan dan fluksi jangkar ... 15
Gambar 2.8 Rangkaian ekivalen motor arus searah penguatan bebas ... 17
Gambar 2.9 Rangkaian ekivalen motor arus searah penguatan seri ... 19
Gambar 2.10 Rangkaian ekivalen motor arus searah penguatan shunt ... 20
Gambar 2.11 Rangkaian ekivalen motor arus searah penguatan kompon pendek.. 21
Gambar 2.12 Rangkaian ekivalen motor arus searah Penguatan kompon panjang 22 Gambar 2.13 Kurva karateristik torsi-arus jangkar ... 25
Gambar 2.14 Kurva karateristik putaran-arus jangkar ... 26
Gambar 2.15 Kurva Karateristik torsi-putaran ... 27
Gambar 3.1 Rangkaian percobaan motor DC kompon panjang tanpa beban ... 40
Gambar 3.2 Rangkaian percobaan DC kompon pendek tanpa beban ... 40
Gambar 3.3 Rangkaian Percobaan motor DC kompon panjang berbeban ... 41
Gambar 3.4 Rangkaian Percobaan Motor DC Kompon pendek berbeban ... 41
vii
Gambar 4.2 Grafik pengaruh jatuh tegangan terhadap torsi motor arus searah kompon panjang ... 56 Gambar 4.3 Grafik pengaruh jatuh tegangan terhadap torsi motor arus searah
kompon pendek ... 56 Gambar 4.4 Grafik pengaruh jatuh tegangan terhadap efisiensi motor arus searah
kompon panjang ... 57 Gambar 4.5 Grafik pengaruh jatuh tegangan terhadap efisiensi motor arus searah
viii
DAFTAR TABEL
Tabel 4.1 Data hasil penguian penurunan tegangan terminal motor DC Kompon Panjang pada kondisi tanpa beban ... . 45 Tabel 4.2 Data hasil pengujian penurunan tegangan terminal motor DC Kompon
Pendek pada kondisi tanpa beban ... 45 Tabel 4.3 Data hasil pengujian penurunan tegangan terminal motor DC Kompon
Panjang pada kondisi berbeban ... 45 Tabel 4.4 Datahasil pengujian tegangan terminal motor DC Kompon Pendek pada
kondisiber beban ... 46 Tabel 4.5 Hasil pengujian jatuh tegangan terhadap kinerja motor arus searah
kompon panjang ... 50 Tabel 4.6 Hasil pengujian jatuh tegangan terhadap kinerja motor arus searah
i ABSTRAK
Listrik merupakan salah satu kebutuhan yang sangat penting dan dibutuhkan oleh semua lapisan masyarakat. Listrik dipergunakan untuk kepentingan penerangan, menunjang proses produksi pada pabrik-pabrik seperti pengoperasian motor DC. Pengoperasian motor DC diharapkan dapat beroperasi secara normal sesuai dengan karakteristik kerja yang dikehendaki, namun tidak dapat dipungkiri adanya gangguan yang dapat menimbulkan kerusakan terhadap system kerja motor, salah satunya adalah jatuh tegangan jala-jala.
Turunnya tegangan supply pada motor selain mempengaruhi kinerja motor. Motor arus searah kompon banyak digunakan sebagai penggerak pada dunia industri,oleh karena itu perlu penelitian ini dilakukan untuk mengetahui jenis motor arus searah penguatan kompon yang terbaik. Dari hasil penelitaian didapatkan hasil bahwa motor arus searah kompon panjang memiliki jatuh putaran yang tidak terlalu jauh akibat jatuh tegangan torsi dan putaran tertinggi pada motor arus searah kompon panjang diperoleh pada saat tegangan terminal bernilai 220 Volt yaitu sebesar 0,107 N-m dan 1450 rpm sedangkan torsi dan putaran terendah diperoleh pada saat tegangan terminal bernilai 190 Volt yaitu sebesar 0,0820 N-m dan 1270 rpm sedangakan torsi dan putaran tertinggi pada motor arus searah kompon pendek diperoleh pada saat tegangan terminal bernilai 220 Volt yaitu sebesar 0,106 N-m dan 1480 rpm sedangkan torsi dan putaran terendah diperoleh pada saat tegangan terminal bernilai 190 Volt yaitu sebesar 0,0975 N-m dan 1250 rpm.
1 BAB I PENDAHULUAN
1.1 Latar Belakang
Motor arus searah adalah sebuah mesin yang berfungsi mengubah energi listrik arus searah ( DC ) menjadi energi mekanik dalam bentuk putaran. Berdasarkan fisiknya motor arus searah secara umum terdiri atas bagian yang diam ( stator ) dan bagian yang bergerak ( rotor ). Stator merupakan tempat diletakannya kumparan medan yang berfungsi untuk menghasilkan fluksi magnet sedangkan rotor ditempati oleh rangkaian jangkar seperti kumparan jangkar, komutator dan sikat.
Motor DC sangat banyak digunakan dalam aplikasi industri. Penggunaan motor DC dapat dijumpai misalnya sebagai motor penggerak beban mekanik. Biasanya bebannya berupa pompa air, blower, hoist pada crane dan lain - lain. Dalam penggunaannya diharapkan motor DC dapat bekerja secara efisien, dimana efisiennya suatu motor DC dapat kita lihat dari besarnya nilai efisiensinya.
2
Dengan demikian, perlu dilakukan pengujian untuk mengetahui pengaruh jatuh tegangan jala jala terhadap kinerja pada motor DC penguatan kompon. Sehingga dengan mengetahui pengaruhnya dapat dilakukan antisipasi terhadap kemungkinan terburuk yang dapat terjadi serta dapat menegetahui jenis penguatan kompon terbaik akibat gangguan jatuh tegangan.
1.2 Tujuan dan Manfaat Penulisan
Adapun tujuan penulisan tugas akhir ini adalah untuk mengetahui pengaruh jatuh tegangan terhadap kinerja pada motor DC penguatan kompon.
Penulisan tugas akhir ini bermanfaat sebagai informasi untuk pemilihan jenis motor DC penguatan kompon yang terbaik.
1.3 Batasan Masalah
Agar pembahasan tugas akhir ini mendapatkan hasil yang maksimal serta terfokus pada judul dan bidang yang telah disebutkan di atas, maka penulis perlu membatasi permasalahan yang akan dibahas. Adapun batasan masalah dalam Tugas Akhir ini adalah :
1. Motor yang digunakan adalah motor DC berpenguatan Kompon 2. Motor DC beroperasi sendiri
3. Tidak membahas proteksi motor akibat jatuh tegangan jala-jala
4. Tidak membahas masalah penyebab terjadinya jatuh tegangan jala-jala 5. Beban yang digunakan adalah beban resistif
3
7. Analisis perhitungan berdasarkan peralatan yang tersedia di Laboratorium Konversi Energi Listrik FT-USU
1.4 Metode Penelitian
Metode yang digunakan dalam penulisan tugas akhir ini adalah : 1. Studi literatur
Yaitu dengan mempelajari buku referensi,jurnal,artikel dari internet, dan bahan kuliah yang mendukung dan berkaitan dengan topik tugas akhir ini. 2. Metode diskusi
Yaitu berupa tanya jawab dengan dosen pembimbing, asisten Laboratorium Konversi Energi Listrik Departemen Teknik Elektro dan teman-teman sesama mahasiswa mengenai masalah-masalah yang timbul selama penulisan tugas akhir ini berlangsung.
3. Studi Lapangan
Melakukan percobaan di Laboratorium Konversi Energi Listrik Fakultas Teknik USU.
4. Melakukan analisa. 1.5 Sistematika Penulisan
Tugas akhir ini disusun berdasarkan sistematika penulisan sebagai berikut: BAB I PENDAHULUAN
4 BAB II MOTOR ARUS
Bab ini membahas tentang motor arus searah (motor DC) secara umum, konstruksi, prinsip kerja, jenis – jenis motor DC, efisiensi dan torsi motor arus searah,karakteristik motor DC penguatan kompon dan pengaruh jatuh tegangan terhadap kinerja motor arus searah kompon
BAB III METODELOGI PENELITIAN
Pada bab ini berisikan tentang metodelogi penelitian tugas akhir meliputi tempat dan waktu penelitian, bahan peralatan dan metode penelitian, pelaksanaan penelitian, variabel yang diamati, teknik pengukuran
BAB IV HASIL DAN PEMBAHASAN
Bab ini berisikan tentang jenis komponen dan spesifikasi peralatan percobaan, rangkaian percobaan, prosedur percobaan, data percobaan, analisis dan grafik hasil percobaan.
BAB V KESIMPULAN DAN SARAN
5 BAB II
MOTOR ARUS SEARAH
2.1. Umum
Motor arus searah (DC) adalah mesin yang mengubah energi listrik arus searah menjadi energi mekanis yang berupa putaran. Pada prinsip pengoperasiannya, motor arus searah sangat identik dengan generator arus searah. Kenyataannya mesin yang bekerja sebagai generator arus searah akan dapat bekerja sebagai motor arus searah. Oleh sebab itu, sebuah mesin arus searah dapat digunakan baik sebagai motor arus searah maupun generator arus searah.
Berdasarkan fisiknya motor arus searah secara umum terdiri atas bagian yang diam dan bagian yang berputar. Pada bagian yang diam (stator) merupakan tempat diletakkannya kumparan medan yang berfungsi untuk menghasilkan fluksi magnet sedangkan pada bagian yang berputar (rotor) ditempati oleh rangkaian jangkar seperti kumparan jangkar, komutator dan sikat.
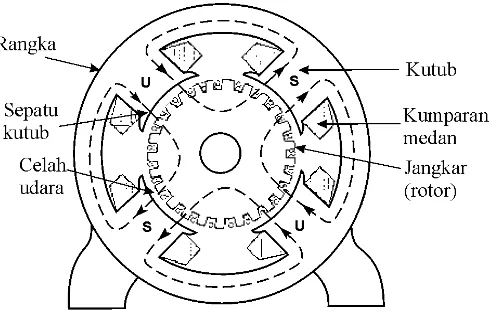
6 2.2. Konstruksi Motor Arus Searah
Konstruksi motor arus searah ditunjukkan oleh Gambar 2.1 (bagian stator) dan Gambar 2.2 (bagian rotor) di bawah ini :
Gambar 2.1 Konstruksi Motor Arus Searah Bagian Stator
Gambar 2.2 Konstruksi Motor Arus Searah Bagian Rotor
Keterangan dari Gambar 2.1 dan Gambar 2.2 tersebut adalah :
1. Rangka
7
memiliki kekuatan mekanis yang tinggi untuk mendukung komponen-komponen mesin tersebut.
Rangka juga berfungsi sebagai tempat mengalirkan fluksi magnet yang dihasilkan oleh kutub-kutub medan. Rangka dibuat dengan menggunakan bahan ferromagnetik yang memiliki permeabilitas tinggi. Rangka biasanya terbuat dari baja tuang (cast steel) atau baja lembaran (rolled steel) yang berfungsi sebagai penopang mekanis dan juga sebagai bagian dari rangkaian magnet.
Pada rangka terdapat papan nama (name plat) yang bertuliskan spesifikasi umum atau data teknik dari motor. Papan nama tersebut untuk mengetahui beberapa hal pokok yang perlu diketahui dari motor tersebut.
2. Kutub Medan
Kutub medan terdiri atas inti kutub dan sepatu kutub. Sepatu kutub yang berdekatan dengan celah udara dibuat lebih besar dari badan inti. Adapun fungsi dari sepatu kutub adalah :
a. Sebagai pendukung secara mekanis untuk kumparan medan
b. Menghasilkan distribusi fluksi yang lebih baik yang tersebar di seluruh jangkar dengan menggunakan permukaan yang melengkung.
8 3. Sikat
Sikat adalah jembatan bagi aliran arus ke lilitan jangkar. Dimana permukaan sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik. Sikat memegang peranan penting untuk terjadinya komutasi.
4. Kumparan Medan
Kumparan medan adalah susunan konduktor yang dibelitkan pada inti kutub. Dimana konduktor tersebut terbuat dari kawat tembaga yang berbentuk bulat ataupun persegi. Rangkaian medan yang berfungsi untuk menghasilkan fluksi utama dibentuk dari kumparan pada setiap kutub.
5. Jangkar
Inti jangkar yang umumnya digunakan dalam motor arus searah adalah berbentuk silinder yang diberi alur-alur pada permukaannya untuk tempat melilitkan kumparan jangkar tempat terbentuknya ggl induksi. Seperti halnya pada inti kutub magnet, jangkar juga dibuat dari bahan berlapis-lapis tipis untuk mengurangi panas yang terbentuk karena adanya arus liar (eddy current). Inti jangkar terbuat dari bahan ferromagnetik yaitu sejenis campuran baja silikon.
6. Kumparan Jangkar
9 7. Komutator
Untuk memperoleh tegangan searah diperlukan alat penyearah yang disebut komutator dan sikat. Komutator terdiri dari sejumlah segmen tembaga yang berbentuk lempengan-lempengan yang dirakit ke dalam silinder yang terpasang pada poros. Agar dihasilkan tegangan arus searah yang konstan, maka komutator yang digunakan hendaknya dalam jumlah yang besar.
8. Celah Udara
Celah udara merupakan ruang atau celah antara permukaan jangkar dengan permukaan sepatu kutub yang menyebabkan jangkar tidak bergesekan dengan sepatu kutub. Fungsi dari celah udara adalah sebagai tempat mengalirnya fluksi yang dihasilkan oleh kutub-kutub medan.
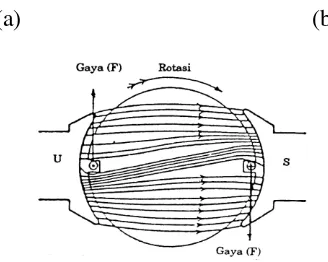
2.3. Prinsip Kerja Motor Arus Searah
10
(a) (b)
(c)
Gambar 2.3 Pengaruh Penempatan Konduktor Berarus Dalam Medan Magnet Kuat medan magnet yang timbul tergantung pada besarnya arus yang mengalir dalam konduktor, seperti ditunjukkan oleh persamaan (2.1) berikut ini :
H =
I N×
...(2.1)
Dimana :
H = kuat medan magnet (lilitan Ampere/meter) N = banyak kumparan (lilitan)
I = arus yang mengalir pada penghantar (Ampere) = panjang dari penghantar (meter)
Pada Gambar 2.3(a) menunjukkan sebuah medan magnet seragam yang dihasilkan oleh kutub-kutub magnet utara dan selatan yang arahnya dari kutub utara menuju kutub selatan. Sedangkan Gambar 2.3(b) menggambarkan sebuah konduktor yang dialiri arus searah dan menghasilkan medan magnet (garis-garis gaya fluksi) disekelilingnya.
11
fluksi menjadi berkurang di atas sebelah kiri konduktor dan di bawah sebelah kanan konduktor.
Kerapatan fluksi yang tidak seragam ini menyebabkan konduktor di sebelah kiri akan mengalami gaya ke atas, sedangkan konduktor di sebelah kanan akan mengalami gaya ke bawah. Kedua gaya tersebut akan menghasilkan torsi yang akan memutar jangkar dengan arah putaran searah dengan putaran jarum jam. Prinsip inilah yang menjadi dasar dari prinsip kerja sebuah motor arus searah. Untuk lebih jelasnya, prinsip kerja sebuah motor arus searah dapat dijelaskan dengan Gambar 2.4 berikut ini :
Gambar 2.4 Prinsip Perputaran Motor Arus Searah
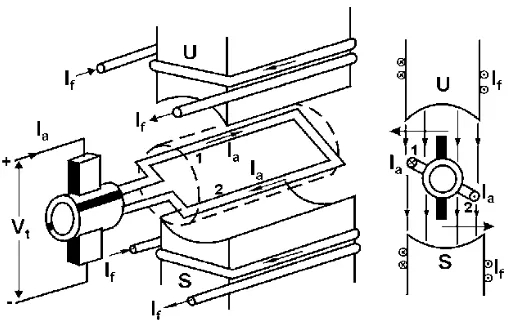
12
berdasarkan hukum Lorentz kita ketahui bahwa apabila sebuah konduktor yang dialiri arus ditempatkan pada sebuah medan magnet maka pada konduktor tersebut akan timbul gaya (F), maka demikian pula halnya pada kumparan jangkar. Besarnya gaya ini bergantung dari besarnya arus yang mengalir pada kumparan jangkar (I), kerapatan fluksi (B) dari kedua kutub dan panjang konduktor jangkar (). Semakin besar fluksi yang terimbas pada kumparan jangkar maka arus yang mengalir pada kumparan jangkar juga besar, dengan demikian gaya yang terjadi pada konduktor juga semakin besar.
Jika arus jangkar (I) tegak lurus dengan arah induksi magnetik (B), maka besar gaya (F) yang dihasilkan oleh arus yang mengalir pada konduktor jangkar sepanjang yang ditempatkan dalam suatu medan magnet dapat ditunjukkan oleh persamaan (2.2) :
F = B . I . ...……...………...………(2.2) Dimana :
F = gaya Lorentz (Newton)
I = arus yang mengalir pada konduktor jangkar (Ampere) B = kerapatan fluksi (Weber/meter2)
= panjang konduktor jangkar (meter)
Maka besar gaya keseluruhan yang ditimbulkan oleh jumlah total konduktor jangkar ditunjukkan oleh persamaan (2.3) :
F=Z .B .I ....………...……(2.3) Dimana :
13
Gaya yang terjadi pada kumparan jangkar di atas akan menghasilkan torsi yang besarnya ditunjukkan oleh persamaan (2.4) :
Ta =F .r ...………...…(2.4) Jika persamaan (2.3) disubstitusikan ke persamaan (2.4), maka akan menghasilkan persamaan (2.5) :
Ta =Z .B .I . .r ...……...(2.5) Dimana :
T = torsi jangkar (Newton-meter) a r = jari-jari rotor (meter)
Apabila torsi start lebih besar dari torsi beban, maka jangkar akan berputar.
2.4. Reaksi Jangkar
Reaksi jangkar merupakan pengaruh medan magnet yang disebabkan oleh mengalirnya arus pada jangkar, dimana jangkar tersebut berada di dalam medan magnet. Reaksi jangkar menyebabkan terjadinya dua hal, yaitu :
1. Demagnetisasi atau penurunan kerapatan fluksi medan utama. 2. Magnetisasi silang.
14
U
S
O M
Bidang Netral Magnetis
Sikat
F
Gambar 2.5 Fluksi yang dihasilkan oleh Kumparan Medan Dari Gambar 2.5 dapat dijelaskan bahwa :
Fluksi didistribusikan simetris terhadap bidang netral magnetis.
Sikat ditempatkan bertepatan dengan bidang netral magnetis.
Bidang netral magnetis didefinisikan sebagai bidang di dalam motor dimana konduktor bergerak sejajar dengan garis gaya magnet (ggm) sehingga gaya gerak listrik (ggl) induksi konduktor pada bidang tersebut adalah nol. Seperti yang terlihat dari Gambar 2.5 sikat selalu ditempatkan di sepanjang bidang netral magnetis. Oleh karena itu, bidang netral magnetis juga disebut sebagai sumbu komutasi karena pembalikan arah arus jangkar berada pada bidang tersebut. Vektor OFM mewakili besar dan arah dari fluksi medan utama, dimana vektor ini tegak lurus terhadap bidang netral magnetis.
15
U
S
Bidang Netral Magnetis
O
A F
Gambar 2.6 Fluksi yang dihasilkan oleh Kumparan Jangkar
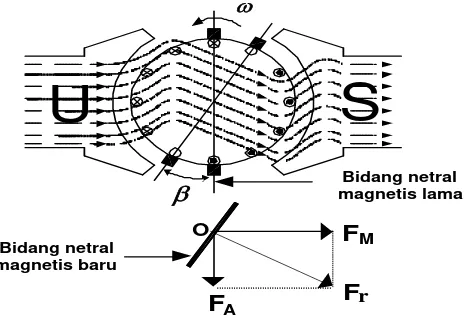
Penentuan arah dari garis gaya magnet yang diakibatkan oleh arus jangkar ditentukan dengan aturan putaran sekrup (cork screw rule). Besar dan arah garis gaya magnet tersebut diwakili oleh vektor OFA yang sejajar dengan bidang netral magnetis. Pada prakteknya, sewaktu mesin beroperasi maka konduktor jangkar dan konduktor medan sama- sama dialiri oleh arus listrik, distribusi fluksi resultan diperoleh dari menggabungkan kedua fluksi tersebut. Oleh karena itu distribusi fluksi medan utama yang melalui jangkar tidak lagi simetris tetapi sudah mengalami pembelokan saat mendekati konduktor yang dialiri arus tersebut. Hal tersebut dikarenakan pengaruh fluksi jangkar yang dapat dilihat dari Gambar 2.7 berikut ini :
U
S
β magnetis lamaBidang netral Bidang netral
magnetis baru
ω
FA
FM
O
Fr
16
Fluksi yang dihasilkan oleh garis gaya magnet jangkar menentang fluksi medan utama pada setengah bagian dari salah satu kutubnya dan memperkuat fluksi medan utama pada setengah bagian yang lain. Hal ini jelas akan menyebabkan penurunan kerapatan fluksi pada setengah bagian dari salah satu kutubnya dan terjadi kenaikan pada setengah bagian yang lain di kutub yang sama. Efek dari intensitas medan magnet atau lintasan fluksi pada jangkar yang memotong lintasan fluksi medan utama ini disebut sebagai reaksi jangkar magnetisasi silang (cross magnetization).
Magnetisasi-silang ini juga menyebabkan pergeseran bidang netral. Pada Gambar 2.7 dapat dilihat bahwa vektor OFr merupakan resultan vektor OFA dan OFM, serta posisi bidang netral magnetis yang baru, di mana selalu tegak lurus terhadap vektor OFr. Bidang netral magnetis motor yang baru bergeser sejauh β karena posisi bidang netral magnetis ini selalu tegak lurus terhadap vektor OF. Dengan pergeseran bidang netral ini maka sikat juga akan bergeser sejauh pergeseran bidang netral magnetis. Hal ini dapat menimbulkan bunga api di segmen komutator dekat sikat.
17
yang disebut efek demagnetisasi reaksi jangkar dan perlu diingat bahwa demagnetisasi hanya terjadi karena adanya saturasi magnetik.
2.5. Jenis – Jenis Motor Arus Searah
Berdasarkan sumber tegangan penguatannya, motor arus searah dapat dibagi menjadi dua, yaitu :
1. Motor arus searah penguatan bebas 2. Motor arus searah penguatan sendiri
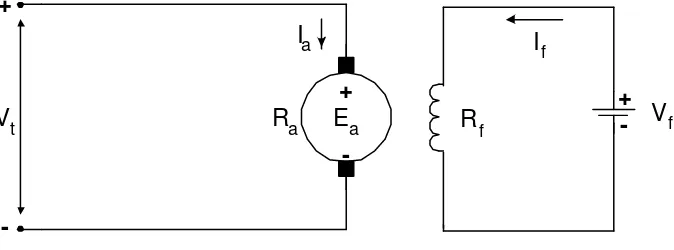
2.5.1. Motor Arus Searah Penguatan Bebas
Motor arus searah penguatan bebas adalah motor arus searah yang sumber tegangan penguatannya berasal dari luar motor. Pada motor ini, kumparan medan tidak terhubung dengan kumparan jangkar. Masing-masing kumparan tersebut disuplai dengan sumber tegangan DC tersendiri. Rangkaian ekivalen motor arus searah penguatan bebas dapat dilihat pada Gambar 2.8 di bawah ini :
+
-E
a
R
a Vf
V
t
Ia I
f
+
-R
f
+
-Gambar 2.8 Rangkaian Ekivalen Motor Arus Searah Penguatan Bebas Berdasarkan hukum Kirchoff tentang tegangan, dari Gambar 2.8 diperoleh persamaan tegangan terminal motor seperti persamaan (2.6) :
18
Dari Gambar 2.11 diperoleh juga persamaan tegangan terminal penguat medan dari motor tersebut seperti ditunjukkan oleh persamaan (2.7) :
Vf = If . Rf………...……….……….…...(2.7) Dimana:
Vt = tegangan terminal jangkar motor arus searah (Volt) Ra = tahanan jangkar (Ohm)
If = arus medan penguatan bebas (Ampere)
Vf = tegangan terminal medan penguatan bebas (Volt) Rf = tahanan medan penguatan bebas (Ohm)
Ea = gaya gerak listrik motor arus searah (Volt) Vsikat = jatuh tegangan pada sikat (Volt)
Umumnya jatuh tegangan pada sikat relatif kecil sehingga besarnya dapat diabaikan, maka untuk rumus selanjutnya Vsikat ini diabaikan.
2.5.2. Motor Arus Searah Penguatan Sendiri
Motor arus searah penguatan sendiri adalah motor arus searah yang sumber tegangan penguatannya berasal dari motor itu sendiri. Dimana kumparan medan berhubungan langsung dengan kumparan jangkar. Kumparan medan dapat dihubungkan secara seri maupun paralel dengan kumparan jangkar dan dapat juga dihubungkan dengan keduanya, yaitu secara seri dan paralel, tergantung pada jenis penguatan yang diberikan terhadap motor.
19 2. Motor arus searah penguatan shunt 3. Motor arus searah penguatan kompon
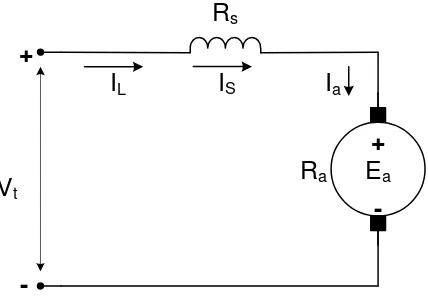
2.5.2.1. Motor Arus Searah Penguatan Seri
[image:30.595.207.421.254.405.2]Rangkaian ekivalen motor arus searah penguatan seri ditunjukkan pada Gambar 2.9 di bawah ini :
Rs
Vt
+
-Ea
Ra
Ia
IL
+
-IS
Gambar 2.9 Rangkaian Ekivalen Motor Arus Searah Penguatan Seri
Pada motor arus searah penguatan seri, kumparan medan dihubungkan secara seri dengan rangkaian jangkar. Oleh sebab itu arus yang mengalir pada kumparan medan seri sama dengan arus yang mengalir pada kumparan jangkar.
Dari Gambar 2.12 diperoleh persamaan tegangan terminal motor seperti ditunjukkan oleh persamaan (2.8) :
Vt = Ea + Is.Rs + Ia. Ra………..………...(2.8) Karena IL = Ia = Is
20
Is = arus kumparan medan seri (Ampere) Rs = tahanan medan seri (Ohm)
IL = arus dari jala-jala (Ampere)
2.5.2.2. Motor Arus Searah Penguatan Shunt
[image:31.595.206.418.286.369.2]Rangkaian ekivalen motor arus searah penguatan shunt ditunjukkan pada Gambar 2.10 di bawah ini :
+
-V
t E
a
R
a
Ia IL
+
-R
sh
I
sh
Gambar 2.10 Rangkaian Ekivalen Motor Arus Searah Penguatan Shunt Pada motor arus searah penguatan shunt, kumparan medan dihubungkan langsung pada terminal sehingga paralel dengan kumparan jangkar.
Dari Gambar 2.13 diperoleh persamaan tegangan terminal motor seperti ditunjukkan oleh persamaan (2.10) :
Vt = Ea + Ia.Ra ………….……….…...(2.10) Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh persamaan (2.11) dan persamaan (2.12) :
sh I =
sh t R
V
……….………(2.11)
IL = Ia + Ish ………...(2.12) Dimana :
21 Rsh = tahanan medan shunt (Ohm) 2.5.2.3. Motor arus searah penguatan kompon
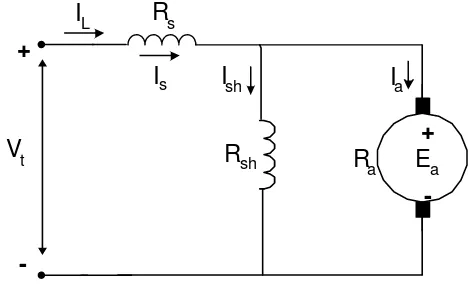
Motor arus searah penguatan kompon merupakan gabungan motor arus searah penguatan seri dan motor arus searah penguatan shunt, sehingga mempunyai sifat diantara keduanya tergantung mana yang kuat lilitannya ( kumparan seri atau shuntnya ). Terdapat dua jenis motor arus searah penguatan kompon yang umum dijumpai, yaitu : motor arus searah penguatan kompon pendek dan motor arus searah penguatan kompon panjang.
Pada motor arus searah penguatan kompon pendek, kumparan medan serinya terhubung secara paralel terhadap kumparan jangkar dan kumparan medan shunt. Rangkaian ekivalen motor arus searah penguatan kompon pendek ditunjukkan oleh Gambar 2.11 berikut ini :
+
-Vt E
a
R
a
Ia IL
+
-Rsh
Ish Is
[image:32.595.194.428.417.562.2]Rs
Gambar 2.11 Rangkaian Ekivalen Motor Arus Searah Penguatan Kompon Pendek
Dari Gambar 2.11 diperoleh persamaan tegangan terminal motor arus searah penguatan kompon pendek seperti ditunjukkan oleh persamaan (2.13) :
22
Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh persamaan (2.14) :
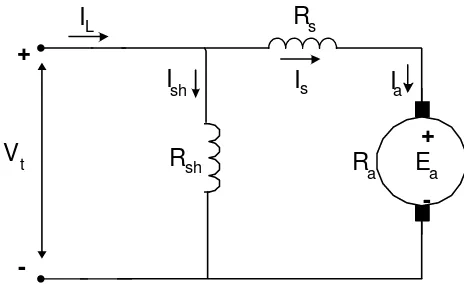
IL = Is = Ia + Ish...(2.14) Pada motor arus searah penguatan kompon panjang, kumparan medan serinya terhubung secara seri terhadap kumparan jangkarnya dan terhubung paralel terhadap kumparan medan shunt. Rangkaian ekivalen motor arus searah penguatan kompon panjang ditunjukkan oleh Gambar 2.12 di bawah ini :
+
-Vt E
a
R
a
Ia IL
+
-Rsh
I
sh Is
R
[image:33.595.198.430.278.420.2]s
Gambar 2.12 Rangkaian Ekivalen Motor Arus Searah Penguatan Kompon Panjang
Dari Gambar 2.12 diperoleh persamaan tegangan terminal motor arus searah penguatan kompon panjang seperti ditunjukkan oleh persamaan (2.15) :
Vt = Ea + Is.Rs + Ia.Ra...(2.15) Karena Is = Ia
Maka persamaan (2.15) dapat juga ditulis seperti persamaan (2.16) :
Vt = Ea + Ia (Rs + Ra) ...(2.16)
Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh persamaan (2.17) dan persamaan (2.18) :
23 I = sh
sh t R
V
………..………(2.18)
2.6. Gaya Gerak Listrik Lawan Pada Motor Arus Searah
Ketika jangkar motor DC berputar dibawah pengaruh torsi penggerak, konduktor jangkar bergerak di dalam medan magnet dan akan menghasilkan tegangan induksi di dalamnya seperti halnya pada generator. Sesuai dengan hukum Lentz, arah ggl induksi tersebut berlawanan dengan tegangan yang diberikan pada motor ( Vt ) dan dikenal sebagai ggl lawan atau ggl balik Ea. Proses terjadinya ggl lawan adalah :
1. Kumparan jangkar ( terletak diantara kutub – kutub magnet ) diberi sumber DC.
2. Pada kumparan – kumparan jangkar timbul torsi, sehingga jangkar berputar ( arahnya sesuai dengan kaidah tangan kiri ).
3. Dalam hal ini jangkar berputar dalam medan magnet sehingga timbul ggl. 4. Arah ggl induksi tersebut berlawanan dengan arah ggl sumber sehingga
kita sebut ggl lawan.
Besarnya tegangan yang diinduksikan tersebut sesuai dengan persamaan (2.19) :
Ea =
a P
. 60
Z
. n .Ф...(2.19)
Karena 60 . a Z . P
bernilai konstan, maka dapat dianggap sebagai suatu konstanta K
sehingga persamaan (2.19) dapat juga ditulis seperti persamaan (2.20) :
24
Ea = gaya gerak listrik lawan motor arus searah (Volt) K = konstanta (bergantung pada ukuran fisik motor) n = kecepatan putaran jangkar (rotasi per menit)
Φ = fluksi masing – masing kutub (Weber) P = jumlah kutub
Z = jumlah total konduktor jangkar a = jumlah kumparan tersambung paralel
2.7 Karakteristik Motor Arus Searah Penguatan Kompon
Karakteristik dari suatu motor harus diketahui, karena karakteristik dari suatu motor akan mencerminkan performansi (unjuk kerja) dari motor listrik tersebut selama kondisi operasinya. Untuk motor arus searah penguatan seri dan motor arus searah penguatan shunt hanya memiliki satu komponen medan. Sedangkan untuk motor arus searah penguatan kompon memiliki dua kumparan medan yakni kumparan medan shunt dan kumparan medan seri.
Pada motor arus searah penguatan kompon panjang dan motor arus searah penguatan kompon pendek terdapat tiga karakteristik, yaitu :
1. Karakteristik torsi – arus jangkar (T/Ia) 2. Karakteristik putaran – arus jangkar (n/Ia) 3. Karakteristik torsi – putaran (T/n)
2.7.1 Karakteristik Torsi – Arus Jangkar (T/Ia)
25
Dimana Фm= Фsh+ Фs
Sehingga persamaan (2.22) dapat juga ditulis seperti persamaan (2.23) :
T = K .(Фsh+ Фs) . Ia...(2.23) Dimana :
T = torsi jangkar (Newton-meter)
Фsh = fluksi pada kumparan medan shunt (Weber)
Фs = fluksi pada kumparan medan seri (Weber)
Dari persamaan (2.24) dapat dilihat bahwa dengan pertambahan arus jangkar (Ia) maka fluks magnetik (Фm) juga akan bertambah sehingga menyebabkan torsi (T) meningkat. Pada motor arus searah penguatan kompon panjang, fluksi medan shunt lebih besar dibandingkan medan seri maka bentuk kurva karakteristik torsi – arus jangkar (T/Ia) seperti kurva 1 pada Gambar 2.13. Sedangkan pada motor arus searah penguatan kompon pendek, fluksi medan seri lebih besar dibandingkan dengan medan shunt maka bentuk kurva karakteristik torsi – arus jangkar (T/Ia) seperti kurva 2 pada Gambar 2.14. Untuk lebih jelasnya, bentuk kurva karakteristik torsi – arus jangkar dapat dilihat pada Gambar 2.14 berikut :
r
26
2.7.2 Karakteristik Putaran – Arus Jangkar (n/Ia)
Sebagaimana telah diketahui bahwa kecepatan putaran motor arus searah sesuai dengan persamaan (2.24) :
n ~
Φ
Ea
...(2.24)
Pada motor arus searah penguatan kompon panjang, fluks magnetik (Φ) dan GGL lawan (Ea) hampir konstan di bawah kondisi normal. Dengan demikian, kecepatan putaran motor (n) hampir selalu konstan walaupun arus jangkar (Ia) berubah-ubah nilainya. Ketika beban bertambah, GGL lawan dan fluks magnetik berkurang akibat drop tegangan pada tahanan jangkar (Ra). Dalam hal ini, GGL lawan berkurang lebih sedikit dibandingkan fluks magnetik. Dengan demikian, kecepatan putaran motor juga menurun sedikit seperti ditunjukkan oleh kurva 2 pada Gambar 2.14. Sedangkan pada motor arus searah penguatan kompon pendek, kecepatan putaran motor akan berubah seiring dengan pertambahan beban seperti ditunjukkan oleh kurva 1 pada Gambar 2.14. Untuk lebih jelasnya, bentuk kurva karakteristik putaran – arus jangkar (n/Ia) dapat dilihat pada Gambar 2.14 berikut :
[image:37.595.214.418.543.686.2]
27 2.7.3 Karakteristik Torsi – Putaran (T/n)
Karakteristik torsi – putaran (T/n) disebut juga karakteristik mekanik. Dari persamaan (2.24) dapat dilihat bahwa jika torsi (T) bertambah, maka nilai (Ia) bertambah, sedangkan fluks magnetik (Фm) tetap. Dengan bertambahnya torsi (T), maka kecepatan putaran (n) akan menurun. Untuk motor arus searah penguatan kompon panjang, bentuk kurva karakteristik torsi – putaran (T/n) ini mendekati ke motor shunt seperti kurva 1 pada Gambar 2.15. Sedangkan untuk motor arus searah penguatan kompon pendek, bentuk kurva karakteristik torsi – putaran (T/n) mendekati ke motor seri seperti kurva 2 pada Gambar 2.15. Untuk lebih jelasnya, karakteristik torsi – putaran (T/n) dapat dilihat pada Gambar 2.15 berikut :
1
2
Gambar 2.15 Kurva Karakteristik Torsi – Putaran (T/N)
2.8 Jatuh Tegangan
Jatuh tegangan adalah selisih antara tegangan ujung pengirim dengan tegangan ujung penerima. Secara matematis dapat dituliskan sebagai berikut :
∆V = Vs – Vr……….…(2.25)
Dimana :
28 Vs = tegangan di sisi pengirim (volt) Vr = tegangan di sisi penerima (volt) Atau dapat juga ditulis dalam bentuk persentase :
∆V (%) = V
V
∆
x 100%...(2.26)
Dimana :
∆V (%) = rugi tegangan dalam persen
V = tegangan kerja (volt) ∆V = rugi tegangan (volt)
Jatuh tegangan pada saluran tenaga listrik secara umum berbanding lurus dengan panjang saluran dan beban serta berbanding terbalik dengan luas penampang penghantar. Besarnya jatuh tegangan dinyatakan baik dalam persen atau dalam besaran volt. Besarnya batas atas dan batas bawah ditentukan oleh kebijkasanaan perusahaan listrik terkait. Penurunan tegangan maksimum pada beban penuh yang dibolehkan di beberapa titik pada jaringan distribusi adalah [SPLN 72 : 1987] :
1. SUTM = 5% dari tegangan kerja bagi sistem radial
2. SKTM = 2% dari tegangan kerja pada sistem spindle dan gugus 3. Trafo distribusi = 3% dari tegangan kerja
4. Saluran tegangan rendah = 4% dari tegangan kerja tergantung kepadatan beban
5. Sambungan rumah = 1% dari tegangan nominal
29
2. Rendahnya tegangan yang diberikan gardu induk atau rendahnya tegangan keluaran dari transformator distribusi
3. Sambungan penghantar yang tidak baik sehingga bermasalah di sisi tegangan menengah dan tegangan rendah
4. Pemilihan jenis penghantar, ukuran penghantar dan konektor yang tidak tepat
5. Arus yang dihasilkan terlalu besar
Untuk menghitung jatuh tegangan, diperhitungkan reaktansinya, maupun faktor dayanya yang tidak sama dengan satu. Maka tegangan yang hilang disepanjang saluran penghantar adalah :
∆V = I ( R cos θ + X sin θ )……….……(2.27)
Dimana :
I = arus beban (ampere) R = tahanan saluran (ohm) X = reaktansi saluran (ohm) Cos θ = faktor daya beban 2.9 Torsi Motor Arus Searah
Torsi merupakan putaran atau pemuntiran dari suatu gaya terhadap suatu poros. Torsi diperoleh dari hasil kali gaya tersebut dengan jari – jari lingkaran dimana gaya tersebut bekerja. Perhatikan Gambar 3.1 berikut :
r
F
[image:40.595.226.384.650.702.2]n putaran/detik
30
Pada suatu pulley dengan jari – jari r meter bekerja suatu gaya F newton yang menyebabkan benda berputar dengan kecepatan n putaran per detik. Maka torsi dari pulley tersebut dapat dihitung dengan persamaan (3.4) berikut :
T = F x r………..(2.28) Dimana :
T = torsi benda (Newton-meter)
F = gaya yang bekerja pada benda (Newton) R = jari – jari benda (meter)
Usaha yang dilakukan oleh gaya tersebut dalam satu putaran sesuai dengan persamaan (2.29) :
W = F x s………...…(2.29)
Karena s = 2 r π
Maka persamaan (2.29) dapat juga ditulis seperti persamaan (2.30) :
W = F x 2 r ………...…..(2.30) π
Dimana :
W = usaha yang dilakukan oleh benda (Joule) s = jarak yang ditempuh benda (meter)
Daya mekanik yang dibangkitkan oleh benda tersebut ditunjukkan oleh persamaan (2.31) :
Pm = F x 2 r x n.……..…..………….…………...(2.31) π Karena F x r = T
dan 2 n = π ω
31
Pm = T x ω…….…...(2.32) Dimana :
P m = daya yang dibangkitkan oleh benda (Watt)
ω = kecepatan putaran benda (radian per detik)
2.9.1. Torsi Jangkar Motor Arus Searah
Di dalam motor arus searah, setiap konduktor di bagian permukaan jangkar akan mengalami gaya F pada suatu jarak r yang merupakan jari jari jangkar. Dengan demikian, masing-masing konduktor menghasilkan suatu torsi yang cenderung untuk memutar. Jumlah seluruh torsi yang dihasilkan oleh konduktor jangkar disebut torsi jangkar (Ta).
torsi jangkar total yang dihasilkan oleh suatu konduktor adalah :
Ta =Z .B .I . .r (2.33)
Dimana I =
a Ia
dan B =
A
Φ
Ta = Z x x x r a
I x A
Φ a
...(2.34)
Dimana A = 2 rπ p
Sehingga persamaan (2.34) dapat ditulis menjadi persamaan (2.35) :
Ta = a
π
2 P I ZΦ a
...(2.35)
32 Ta = 0,159 )
a P ( I
Z aΦ …...(2.36)
Karena a P Z 0,159 = K
Maka diperoleh persamaan (2.37) :
Ta = K .Φ . Ia...(2.37) Karena K nilainya selalu tetap, maka :
Ta ~ Φ Ia
Dari persamaan (2.37) dapat dilihat bahwa torsi di dalam motor arus searah berbanding langsung dengan fluks per kutub dan arus jangkar.
besarnya ggl induksi pada motor arus searah adalah :
Ea =
a P
. 60
Z
. n .Ф
Maka diperoleh persamaan (2.38) :
a Z PΦ = n E 60× a
...(2.38)
Jika persamaan (2.38) disubstitusikan ke persamaan (2.37), maka diperoleh ekspresi lain untuk menyatakan besarnya torsi jangkar yaitu seperti persamaan (2.39) :
Ta = 0,159 x × n
E
60 a
x Ia...(2.39)
atau dapat ditulis seperti persamaan (2.40) :
Ta = 9,55 x n
I Ea× a
...(2.40)
33
Ta = torsi jangkar motor arus searah (Newton-meter) r = rata-rata jari-jari jangkar (meter)
= panjang efektif masing-masing konduktor (meter) Z = jumlah total konduktor jangkar
a = jumlah kumparan tersambung paralel I = arus dalam setiap konduktor (Ampere) B = rapat fluks rata-rata (Weber/meter2) Φ = fluks masing - masing kutub (Weber)
P = jumlah kutub
A = luas penampang jalur fluks per kutub pada jari-jari r (meter2) 2.9.2. Torsi Poros Motor Arus Searah
Pada motor arus searah, tidak semua torsi yang dihasilkan oleh jangkar berubah menjadi usaha berguna karena ada sebagian yang hilang disebabkan oleh rugi – rugi besi dan rugi – rugi gesek didalam motor. Torsi yang dapat dimanfaatkan oleh poros motor untuk melakukan usaha yang berguna dikenal dengan torsi poros atau torsi shaft ( Tsh ). Oleh karena itu torsi poros lebih kecil nilainya bila dibandingkan dengan torsi jangkar. Besarnya torsi poros dapat dihitung dengan menggunakan persamaan :
Tsh =
n/60
π
2 Pout
...(2.41)
atau dapat ditulis seperti persamaan (2.42) :
Tsh =
n P x
9,55 out ...(2.42)
Dimana :
34
Pout = daya keluaran motor arus searah (Watt)
Selisih torsi jangkar dan torsi poros disebut rugi-rugi torsi (torque losses). Secara matematis dapat ditulis seperti persamaan (2.43) :
Ta – Tsh = 9,55 x
n Gesek Rugi Rugi Besi Rugi
Rugi− + −
...(2.43)
2.10. Pengaturan Kecepatan Putaran Pada Motor Arus Searah
Besarnya gaya gerak listrik induksi pada kumparan jangkar akibat berputarnya rotor yang terletak diantara kutub magnet adalah :
Ea =
a P
. 60
Z . n . φ
Karena a.60
P.Z
dapat dianggap sebagai suatu konstanta ( K ), maka persamaan
tersebut dapat juga ditulis seperti persamaan (2.44) : Ea = K . n . φ
Atau n = φ . K Ea ………(2.44)
Sebagaimana telah diketahui bahwa di dalam motor arus searah berlaku persamaan :
Ea = Vt – IaRa...(2.45) Oleh karena itu persamaan (3.19) dapat ditulis seperti :
n = φ . K Ra . Ia -Vt ………(2.46)
35 2.11 Efisiensi pada Motor Arus Searah
Seperti halnya dengan mesin listrik lainnya, pada mesin listrik arus searah, efisiensinya dinyatakan sebagai berikut:
η
(%) =
PoutPin
x 100%
………(2.47)Dimana Pout = 2πnT Atau pada motor :
η
(%) =
HPoutputx746watt input
x 100%
………(2.48)η
(%) =
HPoutputx746(HPinputx746)+wattrugi
x 100%
………...(2.49)Dimana: Pin = daya masukan
Pout = daya keluaran
n = putaran
T = Torsi
∑Prugi = rugi-rugi daya total
2.12 Pengaruh Turunnya Tegangan Terhadap Kinerja Motor
36 n = φ . K Ra . Ia -Vt
Dari persamaan tersebut dapat kita lihat bahwa putaran (n) adalah sebanding dengan besarnya tegangan yang di supply ke terminal motor (Vt), sehingga apabila tegangan yang di supply ke terminal motor berkurang maka putaran yang dihasilkan oleh motor pun akan berkurang pula.
Hubungan pengaruh turunnya tegangan terhadap persamaan torsi jangkar yang dihasilkan oleh motor dapat kita perhatikan pada persamaan (2.42), dimana :
Ta = 9,55 x n
I Ea× a
persamaan persamaan ditulis dapat ditulis seperti persamaan (2.59) berikut :
Ta = 9,55 x
n I Ra) . Ia
-(Vt × a
………...(2.50)
Dari persamaan (2.59) diatas, kita dapat melihat bahwa Ta berbanding lurus dengan Vt sehingga apabila tegangan yang di supply ke terminal motor berkurang maka torsi yang dihasilkan oleh motor juga akan berkurang.
Hubungan pengaruh turunnya tegangan terhadap persamaan efisiensi yang dihasilkan oleh motor dapat kita perhatikan pada persamaan (2.51), dimana :
Pin = Vt x IL (Watt)………(2.51) Pout = Pin – Prugi-rugi ………(2.52)
η = in in P Rugi Rugi
P −
∑
−x 100 %... (2.53)
37 BAB III
METODE PENELITIAN
3.1 Tempat dan Waktu Penelitian
Pengambilan data dalam penelitian tugas akhir ini dilakukan di Laboratorium Konversi Energi Listrik Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara pada tanggal 8 -9 Juni oktober pukul 14.00 s.d. 18.00 WIB.
3.2 Metode Pengumpulan Data
Metode pengumpulan data dalam suatu penelitian akan sangat menentukan keberhasilan penelitian, oleh karena itu perlu direncanakan dengan tepat dalam memilih metode untuk pengumpulan data. Sedangkan metode-metode tersebut adalah sebagai berikut :
1. Metode Dokumentasi
Yang dimaksud metode dokumentasi adalah cara memperoleh data melalui hal-hal atau variabel yang berupa catatan, transkrip, buku, surat kabar, majalah dan lain-lain. Adapun dokumentasi yang akan peneliti gunakan adalah data-data yang berhubungan perubahan kinerja yang disebabkan oleh jatuh tegangan.
2. Metode Observasi
38 3.3 Langkah – Langkah Penelitian
Langkah-langkah penelitian yang ditempuh dalam penelitian ini meliputi : 1. Tahap Persiapan
Tujuan dari tahap persiapan penelitian adalah untuk mengkoordinasikan agar saat penelitian dapat berjalan dengan lancar. Langkah-langkah yang dilakukan adalah sebagai berikut :
a) Mempersiapkan alat dan bahan untuk penelitian, semua alat dan bahan yang akan digunakan harus dipersiapkan terlebih dahulu.
b) Mengkondisikan obyek penelitian.
Obyek penelitian yang dimaksudkan disini adalah Motor Dc kompon. Yaitu memastikan apakah Motor DC dapat beroperasi. Memeriksa Power Supply dan Multimeter apakah sudah disetting dengan benar.
c) Mengkondisikan alat ukur.
Alat ukur sebagai alat pengambil data harus memiliki validitas yang baik. Untuk mendapatkan validitas yang baik alat ukur harus disetting sesuai dengan keadaan seperti skala operasi.
2. Tahap Pengambilan Data
Tujuan dari tahap ini untuk memperoleh data penelitian yang meliputi perubahan arus dan tegangan akibat pengaturan kecepatan pada motor arus searah serta pengaruhnya terhadap efisiensi motor arus searah kompon
3.4 Peralatan Yang Digunakan
39
ini dilakukan pada Laboratorium Konversi Energi Listrik FT-USU. Peralatan-peralatan yang digunakan pada penelitian ini adalah sebagai berikut : 1. Motor arus searah AEG 1 unit
Spesifikasi : Motor yang digunakan pada pengujian ini adalah motor arus searah AEG tipe Gd 110/110 G-Mot Nr. 7983745 dengan penguatan kompon yang terdapat di Laboratorium Konversi Energi Listrik FT-USU dengan spesifikasi sebagai berikut:
V = 220 V P = 1,2 kW IL = 7,1 A Ish = 0.177 A n = 1400 rpm Jumlah Kutub = 2 Kelas Isolasi = B
Tahanan Medan Shunt (J-K) = 1,25 kΩ Tahanan Medan Seri (E-F) = 0,6 Ω Tahanan Jangkar (GA-HB) = 3,8 Ω
1. 1 unit Motor Arus Searah AEG 1,2 kW 2. 1 unit Generator Arus Searah AEG 2 kW
3. Power Supply terdiri dari 1 unit PTAC Tiga Phasa dan 1 unit PTDC 4. 1 buah Penyearah Dioda Tiga Phasa Gelombang Penuh
40 8. 1 buah Tachometer
9. Kabel Penghubung
3.5 Rangkaian Pengambilan Data
3.5.1 Rangkaian percobaan motor arus serah kompon tanpa beban
`` M GA HB G n T J K P T A C 3Φ R S T S + -E F A1 A2 V1 A3
1 IL Is
Ish
[image:51.595.116.503.225.390.2]Ia
Gambar 3.1 Rangkaian Percobaan Motor DC Kompon Panjang Tanpa Beban
M
GA
HB
G
n T J KP
T
A
C
3
Φ
R
S
T
S
+
-E F
A
1A
2V
1A
31
I
sI
aI
shI
L [image:51.595.118.498.462.622.2]41 M GA HB G GA HB n T S3 RL J K P T A C 3Φ R S T S + -E F A1 A2 V1 A3 1 V2 Ish
Is Ia
IL
K
[image:52.595.115.491.86.293.2]AC P T D C J S2 A4 + -If L
Gambar 3.3 Rangkaian Percobaan Motor DC Kompon Panjang Berbeban
M GA HB J K P T A C 3Φ R S T S +
-E F A1 A V1 A3 1 G GA HB n T S3 RL V2
IL Is Ia
Ish
K
AC P T D C J
S2
A4
+
-If
Gambar 3.4 Rangkaian Percobaan Motor DC Kompon Pendek Berbeban
3.6 Prosedur Pengujian
[image:52.595.115.539.337.564.2]42
1. Rangkaian dibuat seperti pada gambar 4.1 dan 4.2 dimana semua switch dalam keadaan terbuka dan PTDC dalam keadaan minimum.
2. Saklar S1 ditutup, kemudian tegangan terminal motor dinaikkan secara perlahan dengan cara menaikkan PTDC sampai V1 menunjukkan tegangan nominal motor yaitu 220 Volt sehingga motor berputar.
3. Pada saat itu dicatat nilai IL pada pembacaan A1, Ish pada pembacaan A2, Ia pada pembacaan A3 serta n pada pembacaan tachometer.
4. Setelah itu tegangan terminal motor diturunkan secara bertahap sesuai dengan nilai yang telah ditentukan, kemudian dicatat nilai IL pada pembacaan A1, Ish pada pembacaan A2, Ia pada pembacaan A3 serta n pada pembacaan tachometer pada setiap tahapan penurunan nilai tegangan terminalnya.
5. Setelah selesai, tegangan terminal motor diturunkan dengan menurunkan PTDC hingga posisi nol.
6. Kemudian saklar S1 dibuka, percobaan selesai.
3.6.2. Prosedur Pengujian Motor DC Penguatan Kompon Pada Kondisi Berbeban
1. Rangkaian dibuat seperti pada gambar 4.3 dan 4.4 dimana semua switch dalam keadaan terbuka dan PTDC dalam keadaan minimum.
2. Besar tahanan geser RL dinaikkan hingga maksimum yaitu 100 Ohm. 3. Saklar S2 ditutup, kemudian arus medan (If) generator dinaikkan dengan
43
4. Saklar S1 ditutup, kemudian tegangan terminal motor dinaikkan secara perlahan dengan cara menaikkan PTDC 1 sampai V1 menunjukkan tegangan nominal motor yaitu 220 Volt sehingga motor berputar.
5. Pada saat itu dicatat nilai IL pada pembacaan A1, Ish pada pembacaan A2, Ia pada pembacaan A3, tegangan keluaran generator (Eg) pada pembacaan V2 serta n pada pembacaan tachometer.
6. Setelah itu tegangan terminal motor diturunkan secara bertahap sesuai dengan nilai yang telah ditentukan, kemudian dicatat nilai IL pada pembacaan A1, Ish pada pembacaan A2, Ia pada pembacaan A3, tegangan keluaran generator (Eg) pada pembacaan V2 serta n pada pembacaan tachometer pada setiap tahapan penurunan nilai tegangan terminalnya. 7. Setelah itu arus medan (If) generator diturunkan dengan menurunkan
PTDC 2 sampai minimum.
8. Kemudian tegangan terminal motor diturunkan dengan menurunkan PTDC 1 hingga posisi nol.
44 BAB IV
ANALISIS PENGARUH JATUH TEGANGAN TERHADAP KINERJA MOTOR ARUS SEARAH KOMPON
4.1. Pengaruh Jatuh Tegangan Terhadap Kinerja Motor Arus Searah Kompon
Motor arus searah yang memiliki medan penguat yang terhubung paralel dengan kumparan jangkarnya disebut motor arus searah penguatan shunt. Untuk menganalisis hubungan antara nilai tegangan supply terhadap torsi dan putaran pada motor arus searah penguatan shunt, maka dilakukan pengujian dengan menurunkan tegangan yang diberikan ke terminal motor melalui autotrafo pada kondisi tanpa beban dan kondisi berbeban. Untuk menurunkan tegangan terminal pada motor perlu ditentukan beberapa nilai penurunan tegangan terminal. Pada Tugas Akhir ini, pengujian dilakukan dengan enam nilai penurunan tegangan terminal, yaitu nilai tegangan nominal atau 220 volt diikuti 10% dari teganangan nominal.
4.2 Hasil Penelitian
45 4.2.1 Data Pengujian
[image:56.595.106.514.359.467.2]Tabel 4.1 Data hasil pengujian penurunan tegangan terminal motor DC Kompon panjang pada kondisi tanpa beban
Tabel 4.2 Data hasil pengujian penurunan tegangan terminal motor DC Kompon pendek pada kondisi tanpa beban
Tabel 4.3 Data hasil pengujian penurunan tegangan terminal motor DC Kompon panjang pada kondisi berbeban
No V Ia Ish Is IL N
1 220 4,94 0,18 4,94 5,12 1450 2 215 4,84 0,17 4,84 5,01 1420 3 210 4,80 0,17 4,80 4,97 1400 4 205 4,74 0,16 4,74 4,9 1370 5 200 4,70 0,16 4,70 4,86 1350 6 195 4,67 0,16 4,67 4,83 1300 7 190 4,64 0,15 4,64 4,79 1270
No V Ia Ish Is IL N
1 220 2,80 0,18 2,80 2,98 1650 2 215 2,73 0,18 2,73 2,91 1600 3 210 2,70 0,17 2,70 2,87 1600 4 205 2,68 0,17 2,68 2,85 1550 5 200 2,65 0,16 2,65 2,81 1520 6 195 2,60 0,16 2,60 2,76 1500 7 190 2,57 0,15 2,57 2,72 1450
No V Ia Ish Is IL N
[image:56.595.108.515.548.656.2]46
Tabel 4.4 Data hasil pengujian penurunan tegangan terminal motor DC Kompon pendek pada kondisiber beban
No V Ia Ish Is IL N
1 220 4,89 0,18 5,07 5,07 1480 2 215 4,79 0,18 4,97 4,97 1450 3 210 4,74 0,17 4,93 4,93 1400 4 205 4,70 0,17 4,87 4,87 1380 5 200 4,68 0,16 4,84 4,84 1350 6 195 4,66 0,16 4,82 4,82 1300 7 190 4,60 0,16 4,76 4,76 1250
4.3 Analisis Data Pengujian
Efisiensi dan torsi pada motor arus searah kompon dapat dihitung dari hasil pengujian dapat dilihat dengan menggunakan persamaan berikut :
• Daya output motor pada kondisi berbeban adalah :
Pout = 2πnT
• Rugi-rugi daya pada motor
Pcu-total= ( Ia )2 x Ra+ ( Is )2 x Rs + ( Ish )2 x Rsh • Torsi motor
�� = 2������
• Efisiensi motor arus searah kompon
����
����+�����−���� x 100 %
Untuk menghitung torsi pada motor, dihitung terlebih dahulu besar ggl armatur pada motor :
• Untuk motor DC penguatan kompon panjang, yaitu : Ea= Vt– Ia x (Rs + Ra)
47
Selanjutnya, berdasarkan data-data yang diperoleh dari hasil pengujian, maka dilakukan perhitungan untuk mendapatkan efisiensi dan torsi motor arus searah penguatan kompon panjang dan motor arus searah penguatan kompon pendek.
4.3.1 Pengujian pengaruh jatuh tegangan pada kinerja motor arus searah kompon Panjang
1.Tegangan terminal (Vt) = 220 Volt Vt= Ea + Ia.(Ra) + Is.(Rs) Ea = Vt - Ia.(Ra) + Is.(Rs)
= 220 + 4,94.(3,8) + 4,94.(0,6) = 220 - 18,77 + 2,96
= 198,27 Volt
�� = 2������
�� = 2198�3,.1427��41450,94 �� = 0.107 N-m ���� = 2 π N T
���� = 2 x 3.14 x 1450 x 0.107 ���� = 974,342 Watt
����� = ��².(Ra) + Is2.(Rs) + Ish2(Rsh)
����� = 4,94 ².(3,8) +4,94 2.(0,6) + 0,182(1250) ����� = 92,73+14,64 + 40,5
48
��� = 974,342 + 147,87 ��� = 1127,2 Watt
Maka dari hasil diatas didapatka efisiensi untuk tegangan terminal 220 Volt adalah
η = ����
��� x 100 %
η = 9741127,342
,2x 100 %
η =86,8 %
2.Tegangan terminal (Vt) = 215 Volt Vt = Ea + Ia.(Ra) + Is.(Rs) Ea = Vt - Ia.(Ra) + Is.(Rs)
= 215 + 4,84.(3,8) + 4,84.(0,6) = 220 - 18,4 + 2,904
= 193,69 Volt
�� = 2������
�� = 2193�3,.1469��41420,84 �� = 0.105 N-m ���� = 2 π N T
���� = 2 x 3.14 x 1420 x 0.105 ���� = 936,34 Watt
����� = ��².(Ra) + Is2.(Rs) + Ish2(Rsh)
49
����� = 139,205 Watt ��� = ���� + ����� ��� = 936,64 + 139,205 ��� = 1075,845 Watt
Maka dari hasil diatas didapatka efisiensi untuk tegangan terminal 220 Volt adalah
η = ����
��� x 100 %
η = 974,342
1127,2x 100 %
η =86,43%
3.Tegangan terminal (Vt) = 210 Volt Vt = Ea + Ia.(Ra) + Is.(Rs) Ea = Vt - Ia.(Ra) + Is.(Rs) = 210 + 4,8.(3,8) + 4,8.(0,6) = 220 - 18,24 + 2,88
= 188,88 Volt
�� = 2������
�� = 2188�3.14,88��14004,8 �� = 0.103 N-m ���� = 2 π N T
���� = 2 x 3.14 x 1400 x 0.103 ���� = 905,576 Watt
50
����� = 4,8 ².(3,8) +4,82.(0,6) + 0,172(1250) ����� = 87,6+ 13,82 + 36,13
����� = 137,55 Watt ��� = ���� + ����� ��� = 905,576 + 137,55 ��� = 1043,12 Watt
Maka dari hasil diatas didapatka efisiensi untuk tegangan terminal 220 Volt adalah
η = �����
�� x 100 %
η = 9051043,576
,12x 100 %
η =86,8%
Dengan persamaan yang sama seperti diatas nilai efisiensi dan torsi pada tegangan 205 Volt,200 Volt,195 Volt,dan 190 Volt didapatkan hasil pengujian tabel 5.
Tabel 5.Hasil pengujian jatuh tegangan terhadap kinerja motor arus searah kompon panjang
No V Ia Ish Is IL n T η (%)
1 220 4,94 0,18 4,94 5,12 1450 0,1070 86,80
2 215 4,84 0,17 4,84 5,01 1420 0,1050 86,43
3 210 4,80 0,17 4,80 4,97 1400 0,1030 86,80
4 205 4,74 0,16 4,74 4,9 1370 0,1010 86,80
5 200 4,70 0,16 4,70 4,86 1350 0,0995 86,70
6 195 4,67 0,16 4,67 4,83 1300 0,0990 86,33
[image:61.595.108.514.546.747.2]51
4.3.2 Pengujian pengaruh jatuh tegangan pada kinerja motor arus searah kompon Pendek
1.Tegangan terminal (Vt) = 220 Volt Vt = Ea + Ia.(Ra) + Is.(Rs) Ea = Vt - Ia.(Ra) + Is.(Rs)
= 220 + 4,86.(3,8) + 5,04.(0,6) = 198,508 Volt
�� = 2������
�� = 2198�3,.1427��41450,86 �� = 0.106 N-m ���� = 2 π N T
���� = 2 x 3.14 x 1450 x 0.106 ���� = 965,23 Watt
����� = ��².(Ra) + Is2.(Rs) + Ish2(Rsh)
����� = 4,86 ².(3,8) +5,04 2.(0,6) + 0,182(1250) ����� = 89,75+ 15,24 + 40,5
����� = 145,49 Watt ��� = ���� + ����� ��� = 965,234+ 145,49 ��� = 1110,724 Watt
52
η = ����
��� x 100 %
η = 965,234
1110,724x 100 %
η =86,8 %
2.Tegangan terminal (Vt) = 215 Volt Vt = Ea + Ia.(Ra) + Is.(Rs) Ea = Vt - Ia.(Ra) + Is.(Rs)
= 215 + 4,79.(3,8) + 4,97.(0,6) = 193,816 Volt
�� = 2������
�� = 2193�3,816.14��14004,79
�� = 0.1055 N-m ���� = 2 π N T
���� = 2 x 3.14 x 1400 x 0.1055 ���� = 927,556 Watt
����� = ��².(Ra) + Is2.(Rs) + Ish2(Rsh)
����� = 4,79 ².(3,8) +4,972.(0,6) + 0,182(1250) ����� = 87,2+ 14,82 + 40,5
53
Maka dari hasil diatas didapatka efisiensi untuk tegangan terminal 215 Volt adalah
η = �����
�� x 100 %
η = 1070927,56
,076x 100 %
η =86,68%
3.Tegangan terminal (Vt) = 210 Volt Vt = Ea + Ia.(Ra) + Is.(Rs) Ea = Vt - Ia.(Ra) + Is.(Rs)
= 210 + 4,72.(3,8) + 4,94.(0,6) = 189,096 Volt
�� = 2������
�� = 2189�3,096.14��13504,72
�� = 0.1052 N-m ���� = 2 π N T
���� = 2 x 3.14 x 1350 x 0.1052 ���� = 891,89 Watt
����� = ��².(Ra) + Is2.(Rs) + Ish2(Rsh)
����� = 4,72 ².(3,8) +4,942.(0,6) + 0,172(1250) ����� = 84,66+ 14,64 + 36,125
54
��� = 1027,315 Watt
Maka dari hasil diatas didapatka efisiensi untuk tegangan terminal 215 Volt adalah
η = ����
��� x 100 %
η = 1027891,89
,315x 100 %
η =86,81%
Dengan persamaan yang sama seperti diatas nilai efisiensi dan torsi pada tegangan 205 Volt,200 Volt,195 Volt,dan 190 Volt didapatkan hasil pengujian tabel 6.
Tabel 6. Hasil pengujian jatuh tegangan terhadap kinerja motor arus searah kompon pendek
No V Ia Ish Is IL n T η (%)
1 220 4,89 0,18 5,07 5,07 1480 0,1060 86,90
2 215 4,79 0,18 4,97 4,97 1450 0,1055 86,68
3 210 4,74 0,17 4,93 4,93 1400 0,1052 86,81
4 205 4,70 0,17 4,87 4,87 1380 0,1040 86,36
5 200 4,68 0,16 4,84 4,84 1350 0,1024 86,12
6 195 4,66 0,16 4,82 4,82 1300 0,1014 86,56
[image:65.595.110.511.398.612.2]55 4.4 Grafik Pengujian
[image:66.595.116.511.162.589.2]4.4.1 pengujian pengaruh jatuh tegangan terhadap kinerja motor arus searah kompon
Gambar 4.1. Grafik Perbandingan kecepatan motor arus searah kompon panjang terhadap jatuh tegangan
1100 1150 1200 1250 1300 1350 1400 1450 1500
190 195 200 205 210 215 220
K e c e p a t a n p u t a r a n
56
Gambar 4.2. Grafik Pergaruh jatuh teganganterhadap torsi motor arus searah kompon panjang
Gambar 4.3.Grafik Pergaruh jatuh tegangan terhadap torsi motor arus searah kompon pendek
0,092 0,094 0,096 0,098 0,1 0,102 0,104 0,106 0,108
190 195 200 205 210 215 220
Kompon Panjang
Kompon Panjang
T o r s i
Tegangan
0 0,02 0,04 0,06 0,08 0,1 0,12
190 195 200 205 210 215 220
kompon Pendek
T o r s i
[image:67.595.113.512.416.623.2]57
Gambar 4.4. Grafik Pergaruh jatuh tegangan terhadap efisiensi motor arus searah kompon panjang
Gambar 4.5. Grafik Pergaruh jatuh tegangan terhadap efisiensi motor arus searah kompon pendek 85,2 85,4 85,6 85,8 86 86,2 86,4 86,6 86,8 87
190 195 200 205 210 215 220
Kompon Panjang
Kompon Panjang Tegangan E f i s i e n s i 86 86,1 86,2 86,3 86,4 86,5 86,6 86,7 86,8 86,9 [image:68.595.113.513.413.621.2]58 BAB V
KESIMPULAN DAN SARAN 5.1. Kesimpulan
Berdasarkan hasil pengujian dan analisis perhitungan yang dilakukan penulis mengambi lkesimpulan sebagai berikut :
1. Torsi danputaranpada motor arus searah penguatan kompon akan menurun seiring dengan turunnya tegangan yang di supply ke terminal motor.
2. Dari analisis data diperoleh bahwa torsi dan putaran tertinggi pada motor arus searah kompon pendek diperoleh pada saat tegangan terminal bernilai 220 Volt yaitu sebesar 0,106 N-m dan 1480 rpm sedangkan torsi dan putaran terendah diperoleh pada saat tegangan terminal bernilai 190 Volt yaitu sebesar 0,0975-m dan 1250 rpm.
3. Torsi dan putaran tertinggi pada motor arus searah kompon panjang diperoleh pada saat tegangan terminal bernilai 220 Volt yaitu sebesar0,107 N-m dan1450 rpm sedangkan torsi dan putaran terendah diperoleh pada saat tegangan terminal bernilai 190 Volt yaitu sebesar 0,0820-m dan 1270 rpm. 4. Perubahan tegangan terminal tidak berdampak signifikan pada efisiensi motor
arus searah kompon
5.2. Saran
Adapun beberapa saran yang bias diberikan darihasil Tugas Akhir ini adalah :
59
60
DAFTAR PUSTAKA
1. Bimbra, P.S,”Generalized Circuit Theory of Electrical Machines”, Khanna Publisher, India, 1975.
2. Theraja, B.L. & Theraja, A.K, “A Text Book of Electrical Technology”, New Delhi, S.Chand and Company Ltd., 2001.
3. Theodore, Wildi,”Electrical Machine Drives and Power Systems “, Prentice Hall Internasional, Liverpool, 1983.
4. Sawhney, A.K,”Electrical Machine Design”, Dhanpat Rai and sons, Patiala,1970.
5. Lister, Eugene C,“Mesin dan Rangkaian Listrik”, Edisi Keenam, Penerbit Erlangga, Jakarta, 1988.
6. Wijaya, Mochtar,”Dasar-Dasar Mesin Listrik”, Djambatan, Jakarta, 2001. 7. Gonen, Turan, “Electric Power Distribution System Engineering”,