DAFTAR PUSTAKA
[1]. Tambun saribu, Samson M. 2014. Pengaruh Posisi Sikat Terhadap Waktu Pengereman pada Motor Arus Searah Penguatan Shunt Dengan Metode dinamis. Medan: Departemen Teknik Elektro, FakultasTeknik, Universitas Sumatera Utara.
[2]. Tanjung, Irpan Rosidi. 2015. Analisis Pengaruh Jatuh Tegangan Terhadap Kinerja Motor Arus Searah Kompon. Medan: Departemen Teknik Elektro, Fakultas Teknik, Universitas Sumatera Utara. [3] Fahni, Al Magrizi.2014. Pengaruh Penambahan Kutub Bantu Pada
Motor Arus Searah Penguatan Seri dan Shunt Untuk Memperkecil Rugi-Rugi. Medan: Departemen Teknik Elektro, FakultasTeknik, Universitas Sumatera Utara. [3]
[4] Wijaya, Mochtar. 2001. Dasar-Dasar Mesin Listrik. Jakarta: Djambatan. [5] Zuhal.2000. “DasarTeknik Tenaga Listrik dan Elektronika Daya”,
Jakarta: Gramedia Pustaka Utama.
[6] Sumanto.1995.“Mesin Arus Searah“(edisi ketiga). Yogyakarta : Andi Offset.
[7] Harifuddin. Juni 2008. ”Pemodelan dan pengendalian motor dc
terkendali jangkar“. Media Elektrik. Vol 3 no 1. Makasar : Universitas Negeri Makasar.
[8] J.Chapman, Stephen. 2005. Electric Machinery Fundamentals (Fourth Ed). New York : McGraw Hill.
[9] Nursalim. November 2012. “Kendali putaran motor dc menggunakan adaptive neuro fuzzy inference system”. Saintek 2012. Kupang : Universitas Nusa Cendana.
[10] P.S. Bimbra.1990. “Electrical Machinery”, Khana Publisher.
[11] Theodore, Wildi. 1983. ”Electrical Machine Design and Power Systems”, Liverpool : Prentice Hall Internasional.
BAB III
METODE PENELITIAN
3.1 Tempat dan Waktu Penelitian
Pengambilan data dalam penelitian tugas akhir ini dilakukan di Laboratorium Konversi Energi Listrik Departemen Teknik Elektro Fakultas Teknik UniversitasSumatera Utara pada tanggal 28 Februari 2016.
3.2 Metode Pengumpulan Data
Metode pengumpulan data dalam suatu penelitian akan sangat menentukan keberhasilan penelitian, oleh karena itu perlu direncanakan dengan tepat dalam memilih metode untuk pengumpulan data. Sedangkan metode-metode tersebut adalah sebagai berikut :
1. Metode Dokumentasi
Metode dokumentasi adalah cara memperoleh data melalui hal-hal atau variabel yang berupa catatan, transkrip, buku, surat kabar, majalah dan lain-lain. Adapun dokumentasi yang akan peneliti gunakan adalah data-data yang berhubungan parameter yang mempengaruhi Torsi dan Kecepatan.
2. Metode Observasi
3.3 Bahan dan Peralatan
Peralatan-peralatan yang digunakan pada penelitian ini adalah sebagai berikut :
1.Satu unit Generator DC AEG 2 KW
2.Satu unit Motor DC 1,2 KW
3.Kabel penghubung
4.Power Supply terdiri dari 1 unit PTAC Tiga Phasa dan 1 unit PTDC 5.Multimeter
6.1 buah Penyearah Dioda Tiga Phasa Gelombang Penuh 7.Tachometer
3.4 Pelaksanaan Penelitian
Dalam melaksanakan penelitian, diambil data yang dibutuhkankan terlebih dahulu. Data yang dibutuhkan tersebut kemudian dianalisa dan dihitung sesuai dengan rumus yang berkaitan. Kemudian hasil yang didapat disajikan dalam bentuk tabel dan kurva.
3.5 Variabel yang Diamati
Variabel – variabel yang diamati dalam penelitian ini meliputi :
- Arus sumber (IL) - Arus jangkar (Ia) - Arus shunt (Ish) - Arus seri (Is)
3.6 Rangkaian Pengambilan Data
Adapun rangkaian percobaandalam penelitian penambahan kutub dan pergeseran sikat pada motor arus searah sebagai berikut :
Gambar 3.1 Rangkaian percobaan kutub bantu dan pergeseran sikat pada motor dc
shunt
Gambar 3.2 Rangkaian percobaan penambahan kutub bantu dan pergeseran sikat
Gambar 3.3 Rangkaian percobaan tanpa kutub bantu dan pergeseran sikat pada
motor dc kompon pendek
Gambar 3.4 Rangkaian percobaan tanpa kutub bantu dan pergeseran sikat pada
Gambar 3.5 Rangkaian percobaan tanpa kutub bantu dan pergeseran sikat pada
motor dc kompon panjang
Gambar 3.3 Rangkaian percobaan penambahan kutub bantu dan pergeseran sikat
pada motor dc kompon panjang
3.7 Prosedur Penelitian
3.7.1 Prosedur penelitan pada motor dc penguatan shunt akibat penambahan
kutub bantu dan pergeseran sikat
Langkah – langkah penelitian :
1) Rangkai seluruh rangkaian yang dibutuhkan pada gambar 3.1, dimana semua switch dalam keadaan terbuka dan PTDC dan PTDC dalam keadaan minimum.
2) Motor dalam keadaan tanpa penambahan kutub bantu.
3) Lakukan pergeseran sikat dengan posisi yang sudah ditentukan. (-300, -200, -100,00,100,200,300)
4) Pada beban generator nyalakan Switch 2 , atur arus Ifsebesar 0,4 A.
5) Jalankan motor dengan cara nyalakan switch 1 lalu atur tegangan PTAC sebesar 50Volt, kemudian catat variabel yangg diamati.(IL, Ia, Ish, Is, n dan T)
6) Matikan motor buka hanya switch 1 saja, kemudian ulangi langkah 4 dengan posisi sikat yang berbeda.
7) Setelah selesai pergeseran posisi sikat , ulangi langkah 3-6 dengan penambahan kutub bantu.
8) Setelah selesai, matikan motor dc tersebut kemudian ganti motor menjadi motor dc komponpendek dan kompon panjang
BAB IV
HASIL DAN PEMBAHASAN
4.1 Umum
Motor arus searah adalah suatu mesin listrik yang berfungsi mengubah energi listrik asrus searah (DC) menjadi energi gerak atau energi mekanik, dimana energi gerak mekanik tersebut berupa putaran rotor. Proses pengkonversian energi listrik menjadi energi mekanik tersebut berlangsung di dalam medan magnet
Pada saat motor arus searah dibebani maka pada kumparan jangkar akan mengalir arus jangkar. Arus ini akan menimbulkan fluksi jangkar yang akan berinteraksi dengan fluksi yang akan dihasilkan kuparan medan motor. Akibatnya akan terjadi perubahan bentuk gelombang fluksi utama. Pengaruh reaksi jangkar akan menyebabkan terjadinya percikan bunga api pada sikat-sikat motor. Hal ini akan mempengaruhi kinerja dari motor arus searah tersebut.Untuk mengatasi masalah ini, maka salah satu caranya adalah dengan menambahkan kutub bantu pada motor arus searah. Pada tulisan ini akan membahas pengaruh penambahan kutub bantu dan pergeseran sikat ada motor arus searah. Pada percobaan ini, akan dilakukan pengukuran terhadap arus jangkar dan putaran motor pada motor dalam kondisi berbeban. Beban yang diberikan berupa tahanan pada generator yang dikopel pada motor [8,9].
4.2 Hasil Penelitian
Penelitian dilakukan pada tanggal 28 Februari 2016 di Laboratorium Konversi Energi Listrik, diperoleh data pengujian sebagai berikut : Vt = 50 Volt
Ra = 3,8 Ω RL = 100 Ω Rsh = 1250 Ω Rkb = 2,3Ω
Tabel 4.1 Data pengujian posisi sikat motor dc shunt tanpa kutub bantu
Posisi sikat IL (A) Ia (A) Ish (A) n (rpm)
-300 4,72 4,68 0,04 650
-200 5,20 5,16 0,04 650
-100 5,55 5,51 0,04 670
00 6,1 6,06 0,04 680
+100 7,39 7,35 0,04 710
+200 7,18 7,14 0,04 690
+300 8,43 8,39 0,04 420
Tabel 4.2 Data pengujian posisi sikat motor dc shunt dengan kutub bantu
Posisi sikat IL (A) Ia (A) Ish (A) n (rpm)
-300 4,48 4,44 0,04 600
-200 4,95 4,91 0,04 600
-100 5,26 5,24 0,04 640
00 5,82 5,78 0,04 650
+100 6,08 6,04 0,04 650
+200 6,54 6,50 0,04 625
Tabel 4.3 Data pengujian posisi sikat motor dc kompon pendek tanpa kutub bantu
Posisi sikat IL (A) Ia (A) Is (A) Ish (A) n (rpm)
-300 3,39 3,35 3,39 0,04 560
-200 3,51 3,47 3,51 0,04 570
-100 3,70 3,66 3,70 0,04 580
00 3,90 3,86 3,90 0,04 600
+100 4,00 3,96 4,00 0,04 600
+200 4,23 4,19 4,23 0,04 600
+300 4,45 4,41 4,45 0,04 560
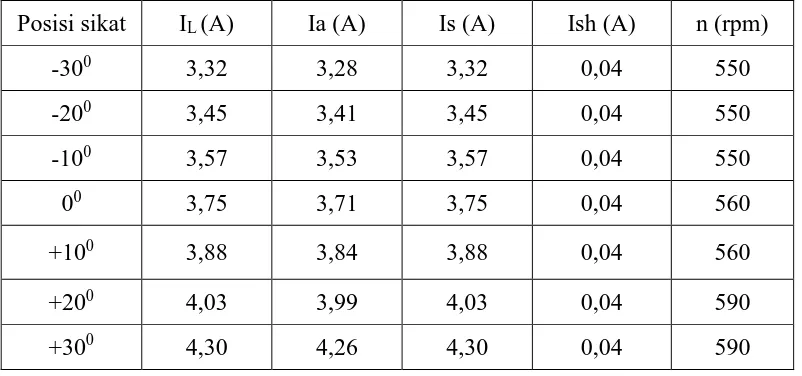
Tabel 4.4 Data pengujian posisi sikat motor dc kompon pendek dengan kutub bantu
Posisi sikat IL (A) Ia (A) Is (A) Ish (A) n (rpm)
-300 3,32 3,28 3,32 0,04 550
-200 3,45 3,41 3,45 0,04 550
-100 3,57 3,53 3,57 0,04 550
00 3,75 3,71 3,75 0,04 560
+100 3,88 3,84 3,88 0,04 560
+200 4,03 3,99 4,03 0,04 590
Table 4.5 Data pengujian posisi sikat motor dc kompon panjang tanpa kutub bantu
Posisi sikat IL (A) Ia (A) Is (A) Ish (A) n (rpm)
-300 3,36 3,32 3,32 0,04 550
-200 3,46 3,42 3,42 0,04 575
-100 3,64 3,60 3,60 0,04 580
00 3,81 3,77 3,77 0,04 550
+100 3,94 3,90 3,90 0,04 550
+200 4,06 4,02 4,02 0,04 600
+300 4,15 4,11 4,11 0,04 550
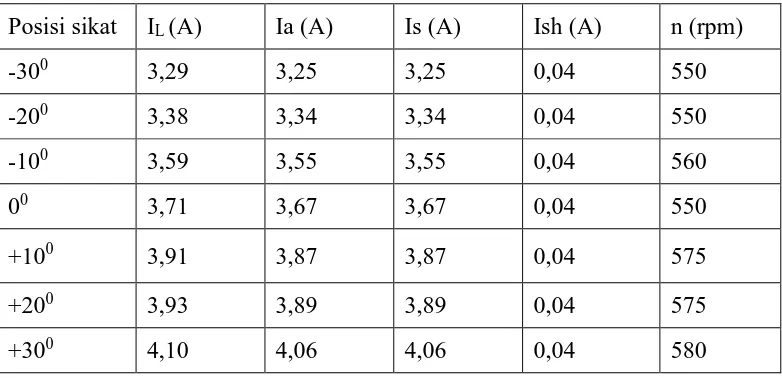
Tabel 4.6 Data pengujian posisi sikat motor dc kompon panjang dengan kutub
bantu
Posisi sikat IL (A) Ia (A) Is (A) Ish (A) n (rpm)
-300 3,29 3,25 3,25 0,04 550
-200 3,38 3,34 3,34 0,04 550
-100 3,59 3,55 3,55 0,04 560
00 3,71 3,67 3,67 0,04 550
+100 3,91 3,87 3,87 0,04 575
+200 3,93 3,89 3,89 0,04 575
+300 4,10 4,06 4,06 0,04 580
Daya masukan motor pada kondisi berbeban adalah : Pin = Vt x IL
Pada kondisi berbeban, daya masukan motor digunakan untuk melayani beban dan juga rugi-rugi daya. Rugi-rugi daya pada saat motor dibebani adalah : - Rugi-rugi tembaga : (Ia)2 x Ra
+ (Ish)2 x Rsh , untuk motor dc shunt (Ia)2 x Ra + (Is)2 x R
s + (Ish)2 x Rsh , untuk motor dc kompon Sehingga daya keluaran motor yang digunakan untuk melayani beban adalah : Pout = Pin – Prugi-rugi
Untuk menghitung torsi adalah : Tsh =9,55 x P
4.3.1 Mengitung torsi akibat pengaruh posisi sikat motor dc shunt tanpa
kutub bantu
Dari data-data Tabel 4.1, maka akan dilakukan perhitungan untuk mendapatkan torsi.
1. Posisi Sikat -30 Pin= Vt x IL
= 50 x 4,72 = 236 Watt
Prugi-rugi = (Ia)2 x Ra +(Ish)2 x Rsh
= (4,68) 2 x 3,8 + (0,04)2 x 1250 = 83,23 + 2
= 85,23Watt
= 236 – 85,23 = 150,77 Watt
Tsh = 9,55 x P
= 9,55 x , = 2,22 N-m
Dengan melakukan perhitungan seperti di atas pada tiap posisi sikat, maka akan diperoleh torsinya seperti pada Tabel 4.7 berikut ini :
Tabel 4.7 Hasil perhitungan torsi akibat pengaruh posisi sikat motor dc shunt tanpa
kutub bantu
Posisi sikat IL (A) Ia (A) Ish (A) n (rpm) T (N-m)
-300 4,72 4,68 0,04 650 2,22
-200 5,20 5,16 0,04 650 2,30
-100 5,55 5,51 0,04 670 2,28
00 6,1 6,06 0,04 680 2,30
+100 7,39 7,35 0,04 710 2,18
+200 7,18 7,14 0,04 690 2,26
+300 8,43 8,39 0,04 420 3,46
4.3.2 Mengitung torsi akibat pengaruh posisi sikat motor dc shunt dengan
Dari data-data Tabel 4.2, maka akan dilakukan perhitungan untuk mendapatkan torsi.
1. Posisi Sikat -30 Pin= Vt x IL
= 50 x 4,48 = 224 Watt
Prugi-rugi = (Ia)2 x (Ra+RKB) +(Ish)2 x Rsh
= (4,44) 2 x (3,8 + 2,3) + (0,04)2 x 1250 = 120,25 + 2
= 122,25Watt
Pout = Pin – Prugi-rugi = 224 – 122,25 = 101,75 Watt
Tsh = 9,55 x P
= 9,55 x , = 1,62 N-m
Tabel 4.8 Hasil Perhitungan Torsi akibat pengaruh posisi sikat motor dc shunt
dengan kutub bantu
Posisi sikat IL (A) Ia (A) Ish (A) n (rpm) T (N-m)
-300 4,48 4,44 0,04 600 1,62
-200 4,95 4,91 0,04 600 1,57
-100 5,26 5,24 0,04 640 1.40
00 5,82 5,78 0,04 650 1,25
+100 6,08 6,04 0,04 650 1,17
+200 6,54 6,50 0,04 625 1,03
+300 7,62 7.58 0,04 660 0,41
4.3.3 Mengitung torsiakibat pengaruhposisi sikat motor dc kompon pendek
tanpa kutub bantu bantu
Dari data-data Tabel 4.3, maka akan dilakukan perhitungan untuk mendapatkan torsi.
1. Posisi Sikat -30 Pin= Vt x IL
= 50 x 3,39 = 169,5 Watt
Prugi-rugi = (Ia)2 x Ra + (Is)2 x R
s + (Ish)2 x Rsh
= (3,35) 2 x 3,8 + (3,39)2x 0,6+ (0,04)2 x 1250 = 42,65 + 6,89 + 2
= 51,54 Watt
Tsh = 9,55 x P
= 9,55 x ,9 = 2,01 N-m
Dengan melakukan perhitungan seperti di atas pada tiap posisi sikat, maka akan diperoleh torsinya seperti pada Tabel 4.9 berikut ini :
Tabel 4.9 Hasil Perhitungan Torsi akibat pengaruh posisi sikat motor dc
kompon pendek tanpa kutub bantu Posisi
sikat IL (A) Ia (A) Is (A) Ish (A) n (rpm) T (N-m)
-300 3,39 3,35 3,39 0,04 560 2,01
-200 3,51 3,47 3,51 0,04 570 2,02
-100 3,70 3,66 3,70 0,04 580 2,04
00 3,90 3,86 3,90 0,04 600 2,03
+100 4,00 3,96 4,00 0,04 600 2,05
+200 4,23 4,19 4,23 0,04 600 2,10
4.3.4 Mengitung torsi akibat pengaruh posisi sikat motor dc kompon pendek
dengan kutub bantu bantu
Dari data-data Tabel 4.4 , maka akan dilakukan perhitungan untuk mendapatkan torsi.
1. Posisi Sikat -30 Pin= Vt x IL
= 50 x 3,32 = 166Watt
Prugi-rugi = (Ia)2 x (Ra+Rkb) + (Is)2 x Rs + (Ish)2 x Rsh
= (3,28) 2 x (3,8+2,3) + (3,32)2x 0,6+ (0,04)2 x 1250 = 65,63 + 6,61 + 2
= 74,24 Watt
Pout = Pin – Prugi-rugi = 166 – 74,24 = 91,76 Watt
Tsh=9,55 x P
= 9,55 x = 1,59 N-m
Tabel 4.10 Hasil Perhitungan Torsi akibat pengaruh posisi sikat motor dc kompon
pendek dengan kutub bantu Posisi
sikat IL (A) Ia (A) Is (A) Ish (A) n (rpm) T (N-m)
-300 3,32 3,28 3,32 0,04 550 1,59
-200 3,45 3,41 3,45 0,04 550 1,60
-100 3,57 3,53 3,57 0,04 550 1,61
00 3,75 3,71 3,75 0,04 560 1,59
+100 3,88 3,84 3,88 0,04 560 1,59
+200 4,03 3,99 4,03 0,04 590 1,50
+300 4,30 4,26 4,30 0,04 590 1,48
4.3.5 Mengitung torsiakibat pengaruhPosisi Sikat Motor DC Kompon Panjang
tanpa Kutub Bantu bantu
Dari data-data Tabel 4.5 , maka akan dilakukan perhitungan untuk mendapatkan torsi.
1. Posisi Sikat -30 Pin= Vt x IL
= 50 x 3,36 = 168 Watt
Prugi-rugi = (Ia)2 x Ra+ (Is)2 x Rs + (Ish)2 x Rsh
= (3,32) 2 x 3,8+ (3,32)2x 0,6+ (0,04)2 x 1250 = 41,89 + 6,61 + 2
= 50,50 Watt Pout = Pin – Prugi-rugi
Tsh = 9,55 x P
= 9,55 x , = 2,04 N-m
Dengan melakukan perhitungan seperti di atas pada tiap posisi sikat, maka akan diperoleh torsinya seperti pada Tabel 4.11 berikut ini :
Tabel 4.11 Hasil Perhitungan Torsi akibat pengaruh posisi sikat motor dc kompon
panjang tanpa kutub bantu Posisi
sikat IL (A) Ia (A) Is (A) Ish (A) n (rpm) T (N-m)
-300 3,36 3,32 3,32 0,04 550 2,04
-200 3,46 3,42 3,42 0,04 575 1,99
-100 3,64 3,60 3,60 0,04 580 2,02
00 3,81 3,77 3,77 0,04 550 2,19
+100 3,94 3,90 3,90 0,04 550 2,22
+200 4,06 4,02 4,02 0,04 600 2,07
+300 4,15 4,11 4,11 0,04 550 2,28
4.3.6 Mengitung torsi akibat pengaruhposisi sikat motor dc kompon panjang
dengan kutub bantu bantu
Dari data-data Tabel 4.6 , maka akan dilakukan perhitungan untuk mendapatkan torsi.
1. Posisi Sikat -30 Pin= Vt x IL
= 50 x 3,29 = 164,50 Watt
Prugi-rugi = (Ia)2 x (Ra + R
= (3,25) 2 x (3,8 + 2,3) + (3,25)2x 0,6+ (0,04)2 x 1250 = 64,43 + 6,34 + 2
= 72,77 Watt
Pout = Pin – Prugi-rugi = 164,50 – 72,77 = 91,73 Watt
Tsh=9,55 x P
= 9,55 x 9 , 3 = 1,59 N-m
Dengan melakukan perhitungan seperti di atas pada tiap posisi sikat, maka akan diperoleh torsinya seperti pada Tabel 4.11 berikut ini :
Tabel 4.12 Hasil Perhitungan Torsi akibat pengaruh posisi sikat motor dc kompon
panjang dengan kutub bantu Posisi
sikat IL (A) Ia (A) Is (A) Ish (A) n (rpm) T (N-m)
-300 3,29 3,25 3,25 0,04 550 1,59
-200 3,38 3,34 3,34 0,04 550 1,60
-100 3,59 3,55 3,55 0,04 560 1,59
00 3,71 3,67 3,67 0,04 550 1,62
+100 3,91 3,87 3,87 0,04 575 1,55
+200 3,93 3,89 3,89 0,04 575 1,55
Tabel 4.13 Perbandingan Kecepatan Motor DC Shunt dan kompon baik Tanpa Kutub maupun Dengan Kutub Bantu
Posisi sikat
Kecepatan (rpm)
Shunt Kompon Pendek Kompon Panjang
Tanpa Kutub Bantu Dengan Kutub Bantu Tanpa Kutub Bantu Dengan Kutub Bantu Tanpa Kutub Bantu Dengan Kutub Bantu
-300 650 600 560 550 550 550
-200 650 600 570 550 575 550
-100 670 640 580 550 580 560
00 680 650 600 560 550 550
+100 710 650 600 560 550 575
+200 690 625 600 590 600 575
+300 420 660 560 590 550 580
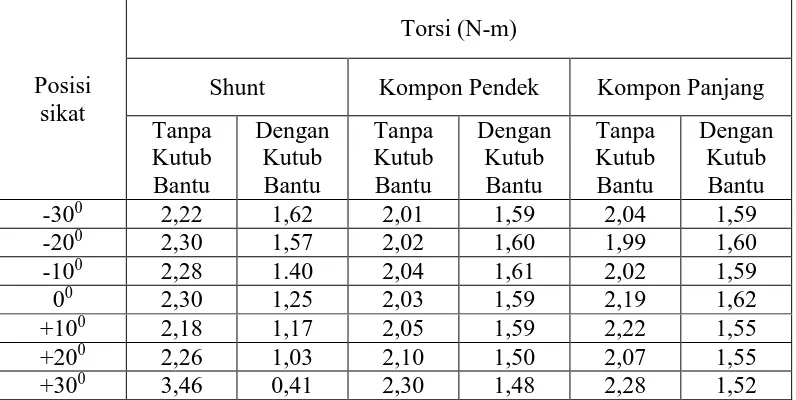
Tabel 4.14 Perbandingan Torsi Motor DC Shunt dan kompon baik Tanpa Kutub maupun Dengan Kutub Bantu
Posisi sikat
Torsi (N-m)
Shunt Kompon Pendek Kompon Panjang
Tanpa Kutub Bantu Dengan Kutub Bantu Tanpa Kutub Bantu Dengan Kutub Bantu Tanpa Kutub Bantu Dengan Kutub Bantu
-300 2,22 1,62 2,01 1,59 2,04 1,59
-200 2,30 1,57 2,02 1,60 1,99 1,60
-100 2,28 1.40 2,04 1,61 2,02 1,59
00 2,30 1,25 2,03 1,59 2,19 1,62
+100 2,18 1,17 2,05 1,59 2,22 1,55
+200 2,26 1,03 2,10 1,50 2,07 1,55
Dari tabel 4.13 dan tabel 4.14 maka akan disajikan dalam bentuk grafik sebagai berikut :
Gambar 4.1 Grafik perbandingan kecepatan motor dc shunt Tanpa Kutub Bantu Vs Motor dc shunt dengan kutub bantu
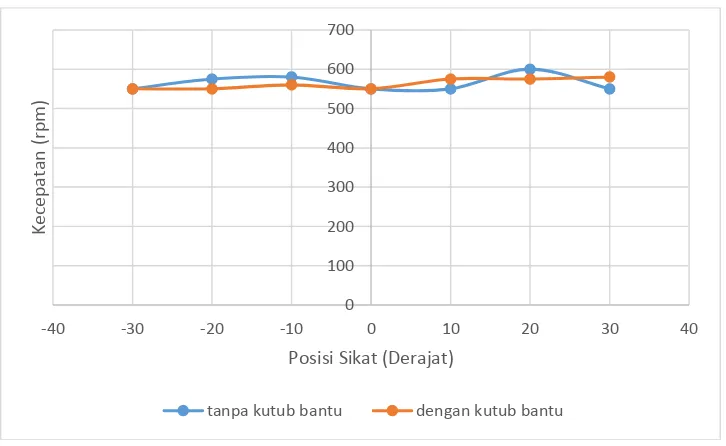
Gambar 4.2 Grafik perbandingan kecepatan motor dc Kompon Pendek Tanpa Kutub Bantu Vs Motor dc Kompon Pendek dengan kutub bantu
0 100 200 300 400 500 600 700 800
-40 -30 -20 -10 0 10 20 30 40
K e ce p at an ( rp m )
Posisi Sikat (Derajat)
tanpa kutub bantu dengan kutub bantu
0 100 200 300 400 500 600 700
-40 -30 -20 -10 0 10 20 30 40
K e ce p at an ( rp m )
Posisi Sikat (Derajat)
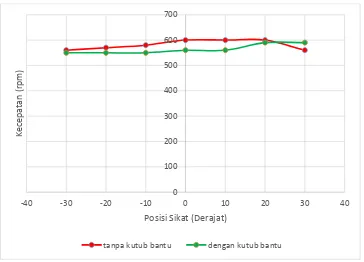
Gambar 4.3 Grafik perbandingan kecepatan motor dc Kompon Panjang Tanpa Kutub Bantu Vs Motor dc Kompon Panjang dengan kutub bantu
Gambar 4.4 Grafik perbandingan Torsi motor dc shunt Tanpa Kutub Bantu Vs Motor dc shunt dengan kutub bantu
0 100 200 300 400 500 600 700
-40 -30 -20 -10 0 10 20 30 40
K e ce p at an ( rp m )
Posisi Sikat (Derajat)
tanpa kutub bantu dengan kutub bantu
0.00 0.50 1.00 1.50 2.00 2.50 3.00 3.50 4.00
-40 -30 -20 -10 0 10 20 30 40
T o rs i (N -m )
Posisi Sikat (Derajat)
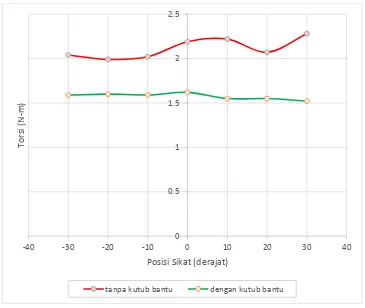
Gambar 4.5 Grafik perbandingan Torsi motor dc Kompon Pendek Tanpa Kutub Bantu Vs Motor dc Kompon Pendek dengan kutub bantu
Gambar 4.6 Grafik perbandingan Torsi motor dc Kompon Panjang Tanpa Kutub Bantu Vs Motor dc Kompon Panjang dengan kutub bantu
0 0.5 1 1.5 2 2.5
-40 -30 -20 -10 0 10 20 30 40
T o rs i (N -m )
Posisi Sikat (derajat)
tanpa kutub bantu dengan kutub bantu
0 0.5 1 1.5 2 2.5
-40 -30 -20 -10 0 10 20 30 40
T o rs i (N -m )
Posisi Sikat (derajat)
Dengan menganalisa dari grafik torsi kita dapat mengetahui bahwa :
1. Untuk motor dc shunt tanpa kutub bantu posisi sikat paling baik berada pada posisi +300 dan bila dengan kutub bantu posisi sikat paling baik di -300, hal ini karena posisi sikat tersebut hampir sejajar dengan bidang netral.
2. Untuk motor dc kompon pendek tanpa kutub bantu posisi sikat paling baik berada pada posisi +300 dan bila dengan kutub bantu posisi sikat paling baik di -100 ,hal ini karena posisi sikat tersebut hampir sejajar dengan bidang netral.
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpuan
Dari pembahasan yang telah dibuat, maka diperoleh kesimpulan sebagai berikut :
1. Pengaruh pergeseran sikat pada motor DC shunt kecepatan tertinggi diperoleh pada posisi sikat +100yakni sebesar 710 rpm dan pada motor DC kompon pada posisi sikat +200yakni sebesar 600rpm, sedangkan untuk torsi tertinggi pada motor DC shunt diperoleh pada posisi sikat +300yakni sebesar 3,46 N-m dan pada motor DC kompon panjang pada posisi sikat +300 yakni sebesar 2,3 N-m.
2. Pengaruh penambahan kutub bantu pada motor DC shunt dan kompon mengalami penurunan kecepatan dan torsi.
3. Kecepatan dan torsi motor dc shunt pada posisi sikat +100 dan tanpa kutub bantu sebesar 710 rpm dan 2,18 N-m lebih tinggi dibandingkan motor dc kompon pendek pada posisi sikat +200dan tanpa kutub bantu sebesar 600 rpm dan 2,10 N-m.
5.2. Saran
Adapun beberapa saran yang bisa diberikan dari hasil tugas akhir ini adalah: 1. Pada pengujian selanjutnya disarankan untuk mengubah-ubah beban motor
DC.
BAB II
TINJAUAN PUSTAKA
MOTOR ARUS SEARAH
2.1. Umum
Motor arus searah (DC) adalah mesin listrik yang mengubah energi listrik arus searah menjadi energi mekanis yang berupa putaran. Konstruksi motor arus searah sangat identik dengan generator arus searah. Kenyataannya mesin yang bekerja sebagai generator arus searah akan dapat bekerja sebagai motor arus searah. Oleh sebab itu, sebuah mesin arus searah dapat digunakan baik sebagai motor arus searah maupun generator arus searah.
Konstruksi motor arus searah secara umum terdiri atas bagian stator dan bagian rotor. Pada bagian yang diam (stator) merupakan tempat diletakkannya kumparan medan yang berfungsi untuk menghasilkan fluksi magnet sedangkan pada bagian yang berputar (rotor) ditempati oleh rangkaian jangkar seperti kumparan jangkar, komutator dan sikat[1,2].
2.2. Konstruksi Motor Arus Searah
Konstruksi motor arus searah terdiri atas dua bagian yaitu bagian yang diam (stator) dan bagian yang bergerak (rotor) ditunjukkan oleh Gambar 2.1a (bagian stator) dan Gambar 2.1b (bagian rotor) [2]:
Gambar 2.1a Konstruksi Motor Arus Searah Bagian Stator
Adapun bagian komponen dari motor arus searah yaitu :
1. Rangka
Rangka motor arus searah adalah tempat meletakkan sebagian besar komponen mesin dan melindungi bagian mesin. Untuk itu rangka harus dirancang memiliki kekuatan mekanis yang tinggi untuk mendukung komponen-komponen mesin tersebut.
Rangka juga berfungsi sebagai tempat mengalirkan fluksi magnet yang dihasilkan oleh kutub-kutub medan. Rangka dibuat dengan menggunakan bahan ferromagnetik yang memiliki permeabilitas tinggi. Rangka biasanya terbuat dari baja tuang (cast steel) atau baja lembaran (rolled steel) yang berfungsi sebagai penopang mekanis dan juga sebagai bagian dari rangkaian magnet.
Pada rangka terdapat papan nama (name plat) yang bertuliskan spesifikasi umum atau data teknik dari motor. Papan nama tersebut untuk mengetahui beberapa hal pokok yang perlu diketahui dari motor tersebut.
2. Kutub Medan
Kutub medan terdiri atas inti kutub dan sepatu kutub. Sepatu kutub yang berdekatan dengan celah udara dibuat lebih besar dari badan inti. Adapun fungsi dari sepatu kutub adalah :
a. Sebagai pendukung secara mekanis untuk kumparan medan.
b. Menghasilkan distribusi fluksi yang lebih baik yang tersebar di seluruh jangkar dengan menggunakan permukaan yang melengkung.
Gambar 2.2 Inti Kutub dan Sepatu Kutub
3. Sikat
Sikat adalah jembatan bagi aliran arus ke lilitan jangkar. Dimana permukaan sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik. Sikat memegang peranan penting untuk terjadinya komutasi. Gambar Sikat dan Komutator dapat dilihat pada Gambar 2.3.
Gambar 2.3 Sikat dan Komotator
4. Kumparan Medan
[image:30.595.240.411.441.554.2]5. Jangkar
Inti jangkar yang umumnya digunakan dalam motor arus searah adalah berbentuk silinder yang diberi alur-alur pada permukaannya untuk tempat melilitkan kumparan jangkar tempat terbentuknya ggl induksi. Seperti halnya pada inti kutub magnet, jangkar juga dibuat dari bahan berlapis-lapis tipis untuk mengurangi panas yang terbentuk karena adanya arus liar (eddy current). Inti jangkar terbuat dari bahan ferromagnetik yaitu sejenis campuran baja silikon.
6. Kumparan Jangkar
Kumparan jangkar pada motor arus searah merupakan tempat dibangkitkannya ggl induksi. Kumparan jangkar ditempatkan di dalam alur-alur inti jangkar. Jenis-jenis konstruksi kumparan jangkar pada rotor ada tiga macam, yaitu : kumparan jerat (lap winding, kumparan gelombang (wave winding), kumparan zig-zag (frog-leg winding)
7. Komutator
Untuk memperoleh tegangan searah diperlukan alat penyearah yang disebut komutator dan sikat. Komutator terdiri dari sejumlah segmen tembaga yang berbentuk lempengan-lempengan yang dirakit ke dalam silinder yang terpasang pada poros.
8. Celah Udara
2.3. Prinsip Kerja Motor Arus Searah
Prinsip kerja dari motor arus searah dapat dilihat dari bagan berikut :
Adanya Fluksi dari Kutub Utama beserta Penguatan dari Kumparan Medan
Adanya Fluksi Putar karena Kumparan Jangkar di aliri Arus Listrik
Interaksi kedua Fluksi tersebut menimbulkan Kerapatan Medan Magnet ( B )
Kerapatan Medan magnet menghasilkan Gaya Lorentz ( F )
Gaya yang bekerja terhadap jari-jari untuk melakukan rotasi atau putaran disebut Torsi ( T )
Banyaknya putaran yang terjadi dalam satu menit disebut Kecepatan Putaran (n)
Pada saat konduktor yang dialiri arus listrik ditempatkan pada suatu medan magnet, maka konduktor akan mengalami gaya mekanik seperti diperlihatkan pada Gambar 2.4 [2].
a) b)
Gambar 2.4 a) Arah fluksi pada kumparan medan dari utara ke selatan
[image:32.595.117.532.543.695.2]Gambar 2.5 Pengaruh Penempatan Konduktor Berarus Dalam Medan Magnet
Kuat medan magnet yang timbul tergantung pada besarnya arus yang mengalir dalam konduktor, seperti ditunjukkan oleh persamaan (2.1) berikut ini :
H = N x I
ℓ ...(2.1)
Dimana :
H = kuat medan magnet (lilitan Ampere/meter) N = banyak kumparan (lilitan)
I = arus yang mengalir pada penghantar (Ampere)
ℓ= panjang dari penghantar (meter)
selatan) dan di bawah sebelah kiri konduktor (dekat kutub utara) sedangkan kerapatan fluksi menjadi berkurang di atas sebelah kiri konduktor dan di bawah sebelah kanan konduktor[3].
[image:34.595.154.466.320.508.2]Kerapatan fluksi yang tidak seragam ini menyebabkan konduktor di sebelah kiri akan mengalami gaya ke atas, sedangkan konduktor di sebelah kanan akan mengalami gaya ke bawah. Kedua gaya tersebut akan menghasilkan torsi yang akan memutar jangkar dengan arah putaran searah dengan putaran jarum jam. Prinsip inilah yang menjadi dasar dari prinsip kerja sebuah motor arus searah. Untuk lebih jelasnya, prinsip kerja sebuah motor arus searah dapat dijelaskan dengan Gambar 2.6.
Gambar 2.6 Prinsip Perputaran Motor Arus Searah
dialiri arus ditempatkan pada sebuah medan magnet maka pada konduktor tersebut akan timbul gaya (F), maka demikian pula halnya pada kumparan jangkar. Besarnya gaya ini bergantung dari besarnya arus yang mengalir pada kumparan jangkar (I), kerapatan fluksi (B) dari kedua kutub dan panjang konduktor jangkar (ℓ). Semakin besar fluksi yang terimbas pada kumparan jangkar maka arus yang mengalir pada kumparan jangkar juga besar, dengan demikian gaya yang terjadi pada konduktor juga semakin besar.
Jika arus jangkar (I) tegak lurus dengan arah induksi magnetik (B), maka besar gaya (F) yang dihasilkan oleh arus yang mengalir pada konduktor jangkar sepanjang ℓ yang ditempatkan dalam suatu medan magnet dapat ditunjukkan oleh persamaan (2.2) [2]:
F = B . I . ℓ...……...………...………(2.2) B =Φm
A dan Փm= Փs + Փsh
Dimana :
F = gaya Lorentz (Newton)
B = kerapatan fluksi (Weber/meter2)
Փ = fluksi (weber)
A = Luas penampang (meter2)
Maka besar gaya keseluruhan yang ditimbulkan oleh jumlah total konduktor jangkar ditunjukkan oleh persamaan (2.3) :
F Z . B . I . ℓ...………...……(2.3) Dimana :
Z = jumlah total konduktor jangkar
Gaya yang terjadi pada kumparan jangkar di atas akan menghasilkan torsi yang besarnya ditunjukkan oleh persamaan (2.4) :
TaF . r ...………...…(2.4) Jika persamaan (2.3) disubstitusikan ke persamaan (2.4), maka akan menghasilkan persamaan (2.5) :
Dimana :
Ta = torsi jangkar (Newton-meter) r = jari-jari rotor (meter)
Apabila torsi start lebih besar dari torsi beban, maka jangkar akan berputar[1]. a. Prinsip kerja Motor Arus Searah Penguatan Shunt
Pada motor Arus searah shunt medan magnet kutub utama mengalami penguatan, hal ini terjadi karena inti besi pada kutub utama dililitkan Kumparan medan yang dialiri arus sehingga timbul fluksi. Kumparan medan ini terhubung secara paralel terhadap kumparan Jangkar sehingga sering disebut motor DC shunt. Kemudian kembali kepada langkah prinsip kerja motor dc umumnya. Tujuan utama motor dc shunt adalah agar diperoleh kecepatan yang hamper konstan.
b. Prinsip kerja Motor Arus Searah Penguatan Kompon
2.4. Reaksi Jangkar
Reaksi jangkar merupakan pengaruh medan magnet yang disebabkan oleh mengalirnya arus pada jangkar, dimana jangkar tersebut berada di dalam medan magnet. Reaksi jangkar menyebabkan terjadinya dua hal, yaitu :
1.Demagnetisasi atau penurunan kerapatan fluksi medan utama. 2.Magnetisasi silang.
[image:37.595.197.432.338.538.2]Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar tidak dialiri oleh arus, maka dengan mengabaikan pengaruh celah udara, jalur fluksi ideal untuk kutub utama dari motor arus searah dua kutub, berasal dari kutub utara menuju kutub selatan seperti pada Gambar 2.7.
Gambar 2.7 Fluksi yang dihasilkan oleh Kumparan Medan
Dari Gambar 2.7 dapat dijelaskan bahwa :
Fluksi didistribusikan simetris terhadap bidang netral magnetis.
Sikat ditempatkan bertepatan dengan bidang netral magnetis[2].
karena itu, bidang netral magnetis juga disebut sebagai sumbu komutasi karena pembalikan arah arus jangkar berada pada bidang tersebut. Vektor OFM mewakili besar dan arah dari fluksi medan utama, dimana vektor ini tegak lurus terhadap bidang netral magnetis. Sewaktu hanya konduktor jangkar saja yang dialiri oleh arus listrik sementara kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar timbul garis gaya magnet atau fluksi. Gambaran arah garis gaya magnet ditunjukkan pada Gambar 2.8.
Gambar 2.8 Fluksi yang dihasilkan oleh Kumparan Jangkar
Gambar 2.9 Hasil Kombinasi Antara Fluksi Medan dan Fluksi Jangkar
Fluksi yang dihasilkan oleh garis gaya magnet jangkar menentang fluksi medan utama pada setengah bagian dari salah satu kutubnya dan memperkuat fluksi medan utama pada setengah bagian yang lain. Hal ini jelas akan menyebabkan penurunan kerapatan fluksi pada setengah bagian dari salah satu kutubnya dan terjadi kenaikan pada setengah bagian yang lain di kutub yang sama. Efek dari intensitas medan magnet atau lintasan fluksi pada jangkar yang memotong lintasan fluksi medan utama ini disebut sebagai reaksi jangkar magnetisasi silang (cross magnetization). Magnetisasi-silang ini juga menyebabkan pergeseran bidang
netral. Pada Gambar 2.9 dapat dilihat bahwa vektor OFr merupakan resultan vektor OFAdan OFM, serta posisi bidang netral magnetis yang baru, di mana selalu tegak lurusterhadap vektor OFr. Bidang netral magnetis motor yang baru bergeser sejauh
karena posisi bidang netral magnetis ini selalu tegak lurus terhadap vektor OF. Dengan pergeseran bidang netral ini maka sikat juga akan bergeser sejauh pergeseran bidang netral magnetis. Hal ini dapat menimbulkan bunga api di segmen komutator dekat sikat.
Sehingga fluksi resultan akan berkurang dari harga tanpa bebannya. Hal inilah yang disebut efek demagnetisasi reaksi jangkar dan perlu diingat bahwa demagnetisasi hanya terjadi karena adanya saturasi magnetik[2].
Gambar 2.10 Timbulnya Bunga Api akibat Reaksi Jangkar
Oleh sebab itu, perlu dilakukannya hal-hal yang dapat mencegah atau mengurangi terjadinya hal diatas. Ada tiga cara yang dapat dilakukan, yaitu 1. Pergeseran sikat (Brush Shifting)
2. Penambahan kutub bantu (Interpole)
3. Belitan kompensasi (Compensating Windings)
2.4.1. Pergeseran Sikat (Brush Shifting)
memperburuk melemahnya fluks akibat reaksi jangkar mesin. Adapun efek diperburuknya fluks akibat reaksi jangkar dapat dilihat pada Gambar 2.11 [3].
Gambar 2.11 Pelemahan ggm akibat pergeseran bidang netral
2.4.2. Penambahan Kutub Bantu (Interpole)
Gambar 2.12 Pergeseran garis netral akibat reaksi jangkar
Gambar 2.13 Kutub magnet utama dan kutub bantu
2.4.3. Belitan Kompensasi (Compensating Windings)
[image:42.595.245.417.328.470.2]Karenanya teknik ini tidak digunakan untuk motor-motor yang bekerja ekstra berat, dimana pelemahan fluks akan menjadi masalah yang serius [3].
2.5. Jenis – Jenis Motor Arus Searah
Berdasarkan sumber tegangan penguatanpada kumparan medan, motor arus searah dapat dibagi menjadi dua jenis, yaitu :
1. Motor arus searah penguatan bebas (the separately excited motor). 2. Motor arus searah penguatan sendiri (self-excited motor).
2.5.1. Motor Arus Searah Penguatan Bebas
[image:43.595.149.497.435.564.2]Motor arus searah penguatan bebas adalah motor arus searah,dimana sumber tegangan penguatannya berasal dari luar motor. Pada motor ini, kumparan medan tidak terhubung dengan kumparan jangkar dan masing-masing disuplai oleh sumber tegangan DC tersendiri. Rangkaian ekivalen motor arus searah penguatan bebas dapat dilihat pada Gambar 2.14 di bawah ini :
Gambar 2.14 Rangkaian Ekivalen Motor Arus Searah Penguatan Bebas
Berdasarkan hukum Kirchoff tentang tegangan, dari Gambar 2.8 diperoleh persamaan tegangan terminal motor seperti persamaan (2.6) :
Vt = Ea + Ra . Ia + Vt…..………...………...(2.6)
dari motor tersebut seperti ditunjukkan oleh persamaan (2.7) :
Vf = Rf . If…...……...……….……….…...(2.7) Dimana:
Vt = tegangan terminal jangkar motor arus searah (Volt) Ra = tahanan jangkar (Ohm)
If = arus medan penguatan bebas (Ampere)
Vf = tegangan terminal medan penguatan bebas (Volt) Rf = tahanan medan penguatan bebas (Ohm)
Ea = gaya gerak listrik motor arus searah (Volt) Vt = jatuh tegangan pada terminal (Volt)
Umumnya jatuh tegangan pada sikat relatif kecil sehingga besarnya dapat diabaikan, maka untuk rumus selanjutnya Vsikatini diabaikan [1].
2.5.2. Motor Arus Searah Penguatan Sendiri
Motor arus searah penguatan sendiri adalah motor arus searah, dimana sumber tegangan penguatannya berasal dari motor itu sendiri. Pada motor ini, kumparan medan terhubungan langsung dengan kumparan jangkar baik secara seri maupun paralel dan dapat juga dihubungkan dengan keduanya, yaitu secara seri dan paralel, tergantung pada jenis penguatan yang diberikan terhadap motor. (1)
Berdasarkan hubungan rangkaian kumparan medan dengan kumparan jangkarnya, motor arus searah penguatan sendiri dapat diklasifikasikan sebagai berikut :
2.5.2.1. Motor Arus Searah Penguatan Seri
[image:45.595.227.425.183.325.2]Rangkaian ekivalen motor arus searah penguatan seri ditunjukkan pada Gambar 2.15 di bawah ini :
Gambar 2.15 Rangkaian Ekivalen Motor Arus Searah Penguatan Seri
Pada motor arus searah penguatan seri, kumparan medan dihubungkan secara seri dengan rangkaian jangkar. Oleh sebab itu arus yang mengalir pada kumparan medan seri sama dengan arus yang mengalir pada kumparan jangkar. Dari Gambar 2.15 diperoleh persamaan tegangan terminal motor seperti ditunjukkan oleh persamaan (2.8) :
Karena
Vt = Ea+ Is. Rs + Ia Ra …...……..………...(2.8)
Karena I L = Ia = Is
Maka persamaan (2.8) dapat juga ditulis seperti persamaan (2.9) : Vt= Ea + Ia (Ra + Rs) …...………....(2.9) Dimana :
Is= arus kumparan medan seri (Ampere) Rs = tahanan medan seri (Ohm)
2.5.2.2. Motor Arus Searah Penguatan Shunt
[image:46.595.205.421.203.288.2]Rangkaian ekivalen motor arus searah penguatan shunt ditunjukkan pada Gambar 2.16 di bawah ini :
Gambar 2.16 Rangkaian Ekivalen Motor Arus Searah Penguatan Shunt
Pada motor arus searah penguatan shunt, kumparan medan dihubungkan langsung pada terminal sehingga paralel dengan kumparan jangkar.
Dari Gambar 2.16 diperoleh persamaan tegangan terminal motor seperti ditunjukkan oleh persamaan (2.10) :
Vt = Ea + Ia.Ra…………...……….…...(2.10) Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh persamaan (2.11) dan persamaan (2.12) :
Ish = Vt
RSh………...……….………(2.11)
I L = Ia + Is……….………(2.12)
Dimana :
2.5.2.3. Motor arus searah penguatan kompon
Motor arus searah penguatan kompon merupakan gabungan rangkaian motor arus searah penguatan seri dan motor arus searah penguatan shunt, sehingga mempunyai sifat diantara kedua motor tersebut tergantung mana yang kuat kumparannya ( kumparan seri atau shuntnya ). Terdapat dua jenis motor arus searah penguatan kompon yang umum dijumpai, yaitu : motor arus searah penguatan kompon pendek dan motor arus searah penguatan kompon panjang.
[image:47.595.204.469.350.517.2]Pada motor arus searah penguatan kompon pendek, kumparan medan serinya terhubung secara paralel terhadap kumparan jangkar dan kumparan medanshunt. Rangkaian ekivalen motor arus searah penguatan kompon pendek ditunjukkan oleh Gambar 2.17 berikut ini :
Gambar 2.17 Rangkaian Ekivalen Motor Arus Searah Penguatan Pendek
Dari Gambar 2.17 diperoleh persamaan tegangan terminal motor arus searah penguatan kompon pendek seperti ditunjukkan oleh persamaan (2.13) :
Vt= Ea+ Is. Rs + Ia
.
Ra...(2.13) Sedangkan persamaan arus yang mengalir pada motor ditunjukkan olehpersamaan (2.14) :
Pada motor arus searah penguatan kompon panjang, kumparan medan serinya terhubung secara seri terhadap kumparan jangkarnya dan terhubung paralel terhadap kumparan medan shunt. Rangkaian ekivalen motor arus searah penguatan kompon panjang ditunjukkan oleh Gambar 2.18.
Gambar 2.18 Rangkaian Ekivalen Motor Arus Searah Penguatan Kompon
Panjang
Dari Gambar 2.18 diperoleh persamaan tegangan terminal motor arus searah penguatan kompon panjang seperti ditunjukkan oleh persamaan (2.15) :
Vt= Ea+ Is. Rs + Ia
.
Ra...(2.15)Karena Is
=
IaMaka persamaan (2.15) dapat juga ditulis seperti persamaan (2.16) :
Vt = Ea + Ia (Rs+ Ra) ...(2.16) Sedangkan persamaan arus yang mengalir pada motor ditunjukkan oleh
persamaan (2.17) dan persamaan (2.18) :[1,2]
I L = Ia + Is...(2.17) Ish = Vt
2.6. Gaya Gerak Listrik Lawan pada Motor Arus Searah
Ketika jangkar motor DC berputar dibawah pengaruh torsi penggerak, konduktor jangkar bergerak di dalam medan magnet dan akan menghasilkantegangan induksi di dalamnya seperti halnya pada generator.Sesuai dengan hukum Faraday, akibat gerakan konduktor di dalam suatu medan magnetik maka pada konduktor tersebut akan timbul gaya gerak listrik (ggl) induksi yang diinduksikan pada konduktor tersebut. Sesuai dengan hukum Lentz, arah ggl induksi tersebut berlawanan dengan tegangan yang diberikan pada motor ( Vt ) dan dikenal sebagai ggl lawan atau ggl balik (Ea).
Proses terjadinya ggl lawan adalah :
1. Kumparan jangkar ( terletak diantara kutub – kutub magnet ) diberi sumber DC. 2. Pada kumparan – kumparan jangkar timbul torsi, sehingga jangkar berputar (
arahnya sesuai dengan kaidah tangan kiri ).
3. Dalam hal ini jangkar berputar dalam medan magnet sehingga timbul ggl.
4. Arah ggl induksi tersebut berlawanan dengan arah ggl sumber sehingga kita sebut ggl lawan. [4,5]
Besarnya tegangan yang diinduksikan tersebut sesuai dengan persamaan (2.19) :
Ea = P
a
.
Z
60
. n.
Ф...(2.19)Karena P
a
.
Z
60 bernilai konstan, maka dapat dianggap sebagai suatu konstanta K
sehingga persamaan (2.19) dapat juga ditulis seperti persamaan (2.20) :
Ea= K
. n.
Ф...(2.20) Dimana :Ea = gaya gerak listrik lawan motor arus searah (Volt) K = konstanta (bergantung pada ukuran fisik motor)
n = kecepatan putaran jangkar (rotasi per menit)
Z = jumlah total konduktor jangkar
a = jumlah kumparan tersambung paralel(1)
2.7 Torsi Motor Arus Searah
[image:50.595.236.404.283.381.2](1)Torsi adalah usaha yang diperlukan agar suatu roda dapat berputar. Torsi diperoleh dari hasil kali gaya tersebut dengan jari – jari lingkaran dimana gaya tersebut bekerja. Perhatikan Gambar 2.19.
Gambar 2.19 Suatu roda yang berputar karena mengalami suatu gaya
Pada suatu roda dengan jari – jari r meter diberikan suatu gaya F newton sehingga roda berputar dengan kecepatan n putaran per detik. Maka torsi dari roda tersebut dapat dihitung dengan persamaan (3.4) [2]:
T = F x r………..(2.21)
Dimana :
T = torsi benda (Newton-meter)
F = gaya yang bekerja pada benda (Newton) r = jari – jari benda (meter)
Usaha yang dilakukan oleh gaya tersebut dalam satu putaran sesuai dengan persamaan (2.22) :
Maka persamaan (2.22) dapat juga ditulis seperti persamaan (2.23) :
W = F x 2 r ………...…..(2.23) Dimana :
W = usaha yang dilakukan oleh benda (Joule) s = jarak yang ditempuh benda (meter)
Daya mekanik yang dibangkitkan oleh benda tersebut ditunjukkan oleh persamaan (2.01) :
Pm= F x 2 r x f.……..…..………….…………...(2.24) Karena F x r = T
dan 2 f = ω
Maka persamaan (2.24) dapat juga ditulis seperti persamaan (2.25) :
Pm= T x ω…….…...(2.25)
Dimana :
Pm= daya yang dibangkitkan oleh benda (Watt)
ω = kecepatan putaran benda (radian per detik)
f = frekuensi atau banyaknya putaran dalam satu detik (Hz atau put/s)
2.7.1. Torsi Jangkar
Di dalam motor arus searah, setiap konduktor di bagian permukaan jangkar akan mengalami gaya F pada suatu jarak r yang merupakan jari jari jangkar. Dengan demikian, masing-masing konduktor menghasilkan suatu torsi yang cenderung untuk memutar. Jumlah seluruh torsi yang dihasilkan oleh konduktor jangkar disebut torsi jangkar (Ta).
torsi jangkar total yang dihasilkan oleh suatu konduktor adalah [2] :
Dimana :
I =Iaa dan B = Φ
A
Ta = Z . ΦA .
Ia
a . ℓ . r...(2.27)
Dimana : A = 2 r l
P
Sehingga persamaan (2.27) dapat ditulis menjadi persamaan (2.28) : Ta = Z Φ2Ia P
a ...(2.28)
atau dapat juga ditulis seperti persamaan (2.29) :
Ta = 0,159 Z Ia(
P
a)...(2.29)
Karena K = 0,159 Z P
a
Maka diperoleh persamaan (2.30) :
Ta = K . . Ia...(2.30) Karena K nilainya selalu tetap, maka :
Ta ~ Ia
Dari persamaan (2.31) dapat dilihat bahwa torsi di dalam motor arus searah berbanding langsung dengan fluks per kutub dan arus jangkar.
besarnya ggl induksi pada motor arus searah adalah :
Ea = P
a
.
Z
60
. n.
Ф...(2.32)PΦ Z
a
=
60x Ea
n ...(2.33)
Jika persamaan (2.29) disubstitusikan ke persamaan (2.33), maka diperoleh ekspresi lain untuk menyatakan besarnya torsi jangkar yaitu seperti persamaan (2.34) :
Ta= 0,159 x
[
60x Ean
]
x Ia...(2.34)atau dapat ditulis seperti persamaan (2.35) :
Ta= 9,55 x
[
Ea x Ia
n
]
...(2.36)Dimana :
Ta= torsijangkar motor arus searah(Newton-meter)
A = luas penampang jalur fluks per kutub pada jari-jari r(meter2) Berdasarkan jenis motor arus searah, torsi jangkar mempunyai nilai yang berbeda karena nilai tegangan induksi (Ea) masing-masing motor juga berbeda yaitu :
a. Untuk motor arus searah penguatan Seri
Ea= Vt - Ia (Ra + Rs)
Ta= 9,55 x
[
{Vt- Ia Ra + Rs }x Ia
n
]
Ta= 9,55 x
[
Vt. Ia - Ia2 Ra + Rs
n
]
...(2.37)Ea= Vt -Ia.Ra
Ta= 9,55 x
[
Vt. Ia - Ia2.Ra
n
]
...(2.38)c. Untuk motor arus searah penguatan kompon pendek
Ea= Vt - Is. Rs + Ia
.
RaTa= 9,55 x
[
Vt. Ia - Is. Rs + Ia2 .Ra
n
]
...(2.39)d. Untuk motor arus searah penguatan kompon panjang
Ea= Vt - Ia (Rs+ Ra)
Ta= 9,55 x
[
Vt. Ia - Ia2 Ra + Rs
n
]
...(2.40)2.7.2. Torsi Poros
Pada motor arus searah, tidak semua torsi yang dihasilkan oleh jangkar berubah menjadi usaha berguna karena ada sebagian yang hilang disebabkan oleh rugi–rugi besi dan rugi–rugi gesek didalam motor. Torsi yang dapat dimanfaatkan oleh poros motor untuk melakukan usaha yang berguna dikenal dengan torsi poros atau torsi shaft (Tsh). Oleh karena itu torsi poros lebih kecil nilainya bila dibandingkan dengan torsi jangkar. Besarnya torsi poros dapat dihitung dengan menggunakan persamaan (2.41) :
Tsh
=
Pout
2 n/60...(2.41)
Tsh= 9,55 x Poutn ...(2.42) Dimana :
Tsh = torsi poros motor arus searah (Newton-meter)
Pout = daya keluaran motor arus searah (Watt)
Selisih torsi jangkar dan torsi poros disebut rugi-rugi torsi (torquelosses). Secara matematis dapat ditulis seperti persamaan (2.43) [1]:
Ta - Tsh = 9,55 xRugi-rugi besi+Rugi-rugi gesekn ...(2.43)
2.8 Kecepatan Putaran Motor Arus Searah
Putaran merupakan output energy mekanik dari sebuah motor listrik. Pada motor dc, kecepatan putaran diperoleh dari penurunan rumus pada persamaan (2.44) :
Ea = K
. n.
Ф...(2.44)Karena Ea = Vt - Ia.Ra Ea =
P a
.
Z
60
. n.
ФMaka persamaan (2.44) dapat juga ditulis seperti persamaan (2.45) :
n
= Vt - Ia.RaK Փ ……...(2.45)
dari persamaan (2.45) kita dapat mengatur kecepatan dengan cara mengubah parameter fluksi (Փ), tahanan (Ra) dan , tegangan terminal (Vt).
a. Untuk kecepatan motor seri Ea = Vt - Ia (Ra + Rs)
n
= EaK Փ
n
= Vt−Ia Ra+RsK . Փ ………...………...…( 2.46) b. Untuk kecepatan motor kompon Shunt
Ea = Vt - Ia.Ra
n
= Vt−Ia . RaK . Փ ………...………...………( 2.47)
c. Untuk kecepatan motor kompon pendek Ea = Vt - Is. Rs + Ia
.
Ran
= Vt− Is.Rs+Ia.RaK . Փ ………...………..…( 2.48)
d. Untuk kecepatan motor kompon panjang Ea = Vt - Ia (Rs+ Ra)
n
= Vt − Ia Rs+RaBAB I
PENDAHULUAN
1.1 Latar Belakang
Motor arus searah adalah sebuah mesin listrik yang berfungsi mengubah energi listrik arus searah ( DC ) menjadi energi mekanik dalam bentuk putaran. Penggunaan Motor arus searah sudah banyak dipergunakan di industri atau pabrik -pabrik seperti pabrik baja, tambang dan kereta api listrik. motor DC juga dapat dijumpai sebagai motor penggerak beban mekanikmisalnya kipas angin, pompa air, blower, hoist, crane, conveyor, lokomotif listrik, elevator dan lain - lain.
Disaat motor diberi beban, maka fluksi akan berkurang dan arus medan akan berkurang juga. Hal ini disebabkan oleh karena adanya reaksi jangkar. Reaksi jangkar sangat berpengaruh terhadap kinerja, efisiensi, dan torsi dari motor tersebut. Untuk mengurangi reaksi jangkar ini, ada tiga cara/teknik yang dapat dilakukan yaitu melakukan pergeseran posisi sikat, menambahkan kutub bantu, dan belitan kompensasi.
1.2 Perumusan Masalah
Adapun rumusan masalah tugas akhir ini adalah : 1. Bagaimana pengaruh Reaksi Jangkar pada motor dc
2. Bagaimana pengaruh pergeseran sikat sebagai solusi mengurangi Reaksi Jangkar.
3. Bagaimana pengaruh penambahan kutub bantu sebagai solusi mengurangi Reaksi Jangkar.
4. Bagaimana pengaruh pergeseran sikat dan kutub bantu terhadap torsi dan kecepatan motor dc.
1.3 Tujuan
Adapun tujuan penulisan tugas akhir ini adalah :
1. Untuk mengetahui pengaruh posisi sikat terhadap torsi dan kecepatan motor dc Shunt dan Kompon.
2. Untuk mengetahui pengaruh penambahan kutub bantu terhadap torsi dan kecepatan motor dc Shunt dan Kompon.
3. Untuk memperlihatkan perbandingan torsi dan kecepatan terhadap Motordc shunt dankompon akibat pengaruh pergeseran sikat tanpa kutub bantu dan dengan kutubbantu.
1.4 Batasan Masalah
Adapun batasan masalah dalam Tugas Akhir ini adalah : 1. Motor yang digunakan adalah motor dc shunt dan kompon 2. Rugi-rugi yang dihitung hanya rugi-rugi tembaga(Cu). 3. Hanya membahas motor dc dalam keadaan berbeban.
4. 4.Analisis perhitungan berdasarkan peralatan yang tersedia di Laboratorium Konversi Energi Listrik FT-USU.
1.5Manfaat
ABSTRAK
Motor arus searah adalah sebuah mesin arus searah yang mengubah energi listrik menjadi energi mekanik. Mesin arus searah dapat berfungsi sebagai motor maupun generator karena konstruksinya identik. Penggunaan motor arus searah sering kita jumpai di Industri dan pabrik-pabrik, sehingga motor diharapkan memiliki kinerja yang maksimal sebagai penggerak suatu beban mekanik. Untuk memenuhi semuannya ini, maka diperlukan motor arus searah yang memiliki kecepatan dan torsi tinggi. Pada saat motor DC dibebani, akan mengalir arus jangkar yang mengakibatkan terjadinya reaksi jangkar. Reaksi jangkar akan mempengaruhi kinerja pada motor DC, untuk mengatasinya adalah dengan penambahan kutub bantu dan pergeseran sikat pada motor DC.
Pada tugas akhir ini, penulis menganalisa perbandingan kecepatan dan torsi motor arus searah shunt dan kompon akibat penambahan dan kutub pergeseran sikat. Berdasarkan hasil pengujian dan perhitungan, Kecepatan dan torsi motor dc shunt pada posisi sikat +100 dan tanpa kutub bantu sebesar 710 rpm dan 2,18 N-m lebih tinggi dibandingkan motor dc kompon pendek pada posisi sikat +200 dan tanpa kutub bantu sebesar 600 rpm dan 2,10 N-m.
Kata kunci : motor dc shunt dan kompon, reaksi jangkar, pergeseran sikat,
TUGAS AKHIR
ANALISIS PERNGARUH REAKSI JANGKAR TERHADAP
KECEPATAN DAN TORSI MOTOR ARUS SEARAH SHUNT
DAN KOMPON
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT-USU)
Diajukan Untuk Memenuhi Salah Satu Persyaratan dalam
Menyelesaikan Pendidikan Sarjana (S-1) pada Departemen Teknik
Elektro Sub Konsentrasi Teknik Energi Listrik
Oleh:
TRENDY TAMPUBOLON
NIM: 110402048
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ABSTRAK
Motor arus searah adalah sebuah mesin arus searah yang mengubah energi listrik menjadi energi mekanik. Mesin arus searah dapat berfungsi sebagai motor maupun generator karena konstruksinya identik. Penggunaan motor arus searah sering kita jumpai di Industri dan pabrik-pabrik, sehingga motor diharapkan memiliki kinerja yang maksimal sebagai penggerak suatu beban mekanik. Untuk memenuhi semuannya ini, maka diperlukan motor arus searah yang memiliki kecepatan dan torsi tinggi. Pada saat motor DC dibebani, akan mengalir arus jangkar yang mengakibatkan terjadinya reaksi jangkar. Reaksi jangkar akan mempengaruhi kinerja pada motor DC, untuk mengatasinya adalah dengan penambahan kutub bantu dan pergeseran sikat pada motor DC.
Pada tugas akhir ini, penulis menganalisa perbandingan kecepatan dan torsi motor arus searah shunt dan kompon akibat penambahan dan kutub pergeseran sikat. Berdasarkan hasil pengujian dan perhitungan, Kecepatan dan torsi motor dc shunt pada posisi sikat +100 dan tanpa kutub bantu sebesar 710 rpm dan 2,18 N-m lebih tinggi dibandingkan motor dc kompon pendek pada posisi sikat +200 dan tanpa kutub bantu sebesar 600 rpm dan 2,10 N-m.
Kata kunci : motor dc shunt dan kompon, reaksi jangkar, pergeseran sikat,
KATA PENGANTAR
Penulis bersyukur kepada Allah Bapa Yang Maha Kuasa dan Tuhan Yesus Kristus atas segala berkat dan anugerahNya sehingga penulis dapat menyelesaikan tugas akhir yang berjudul :
“
ANALISIS PERNGARUH REAKSI JANGKAR TERHADAP
KECEPATAN DAN TORSI MOTOR ARUS SEARAH SHUNT
DAN KOMPON
”(Aplikasi pada Lab.Konversi Energi Listrik Fakultas Teknik USU)
Penulisan Tugas Akhir ini merupakan salah satu persyaratan yang wajib dipenuhi sebagai salah satu syarat untuk memperoleh gelar sarjana teknik pada departemen Teknik Elektro FT USU.
Tugas Akhir ini penulis persembahankan untuk kedua orangtua yang telah membesarkan penulis dengan kasih sayang yang tak terhingga yaitu almarhum Sabam M.T Tampubolon dan Rumia D Simatupang yang telah membesarkan, mendidik, dan mendoakan dengan penuh kasih sayang serta abang penulis yang memberi dukungan, semangat dan kepercayaannya.
Selama masa perkuliahan sampai masa penyelesaian Tugas Akhir ini, penulis banyak memperoleh bimbingan dan dukungan dari berbagai pihak. Untuk itu, dengan setulus hati penulis menyampaikan ucapan terima kasih yang sebesar-besarnya kepada :
2. Bapak Ir. Masykur Sy ,MT selaku Dosen Wali penulis yang telah membimbing dan mengarahkan penulis selama masa perkuliahan..
3. Bapak Ir. Surya Tarmizi Kasim, Msi selaku Ketua Departemen Teknik Elektro FT-USU.
4. Bapak Rachmad Fauzi, ST, MT selaku Sekretaris Departemen Teknik Elektro, FT-USU.
5. Bang Roy, sebagai staff administrasi Laboratorium Konversi Energi Listrik, Aspar Nasution dan M.Zein yang sudah menyediakan waktu dan pikiranya, dan semua staff asisten di Laboratorium Konversi Energi Listrik.
6. Riandy sembiring, Christo surbakti, Marluhut sugiro, Abang senior Rahim sitompul dan Jesayas Sihombing yang telah membantu penulis dalam mengerjakan tugas akhir ini.
7. Bang Marthin,Kak Ester,Kak Umi,Pak Ponijan dan Bang Dipo, selaku staf pegawai Departemen Teknik Elektro,Fakultas Teknik, Universitas Sumatera Utara yang telah membantu penulis dalam pengurusan administrasi selama perkuliahan.
8. Semua teman-teman kuliah, par bahagia, par susuk, dan par pasar 1, khususnya sebagai inspirasi Lae Roni, Riko, Tony, Risjen, Sandro , Wahyudi , serta teman seperjuangan dan senasib dalam jatuh bangun di perkuliahan, M. Harris, Mangatur, Afrisanto , Irvan, Ari, Yuda, Ricky, Henry.
9. Semua teman-teman kelompok lab dan nim terdekat, seprianti, Fandry, Guntur, Andri Simamora, Dhani, Ikhyar.
10. Semua teman-teman clan COC Elektro Usu, khususnya penggagas Yoga, Fikry, Zein, Wahyudi dan reshuflenya clan Inisayalae yaitu Ari, Tony, Denago, Mian. 11. Penulis juga mengucapkan terima kasih kepada senior dan junior yang telah
membantu penulis selama perkuliahan.
Penulis menyadari bahwa Tugas Akhir ini masih jauh dari sempurna. Oleh karena itu penulis sangat mengharapkan saran dan kritik yang membangun demi penyempurnaan Tugas Akhir ini. Penulis berharap Tugas Akhir ini dapat bermanfaat bagi para pembaca, khususnya mahasiswa yang ingin lebih mengetahui dan mendalami Tugas Akhir Penulis.
Medan, Juni 2016 Penulis
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... v
DAFTAR GAMBAR ... vii
DAFTAR TABEL ... viii
BAB I PENDAHULUAN... 1
1.1 LATAR BELAKANG ... 1
1.2 PERUMUSAN MASALAH ... 1
1.3 TUJUAN ... 2
1.4 BATASAN MASALAH ... 2
1.5 MANFAAT ... 2
BAB II TINJAUAN PUSTAKA ... 3
2.1 UMUM ... 3
2.2 KONSTRUKSI MOTOR ARUS SEARAH ... 4
2.3 PRINSIP KERJA MOTOR ARUS SEARAH ... 8
2.4 REAKSI JANGKAR ... 12
2.4.1 Pergeseran Sikat (Brush Shifting) ... 16
2.4.2 Penambahan Kutub Bantu (interpole) ... 17
2.5 JENIS-JENIS MOTOR ARUS SEARAH ... 19
2.5.1 Motor Arus Searah Penguatan Bebas ... 19
2.5.2 Motor Arus Searah Penguatan Sendiri ... 20
2.5.2.1 Motor Arus Searah Penguatan Seri ... 21
2.5.2.2 Motor Arus Searah Penguatan Shunt ... 22
2.5.3.3 Motor Arus Searah Penguatan Kompon ... 23
2.6 GAYA GERAK LISTRIK ... 25
2.7 TORSI MOTOR ARUS SERAH ... 26
2.7.1 Torsi Jangkar Motor Arus Serah ... 27
2.7.2 Torsi Poros Motor arus Searah ... 30
2.8 KECEPATAN PUTARAN MOTOR ARUS SEARAH... 31
BAB III METODE PENELITIAN ... 33
3.1 Tempat dan Waktu ... 33
3.2 Metode Pengumpulan Data ... 33
3.3 Bahan dan Peralatan ... 34
3.4 Pelaksanaan Penelitian ... 34
3.5 Variabel yang Diamati ... 34
3.6 Rangkaian Pengambilan Data ... 35
3.7 Prosedur Penelitian ... 38
BAB IV HASIL DAN PEMBAHASAN ... 37
4.1 Umum ... 39
4.2 Hasil Penelitian ... 39
4.3 Analisa data ... 43
BAB V KESIMPULAN DAN SARAN ... 57 DAFTAR PUSTAKA
DAFTAR GAMBAR
Gambar 2.1a Konstruksi motor arus searah bagian stator ... 4
Gambar 2.1b Konstruksi motor arus searah bagian rotor ... 4
Gambar 2.2 Inti Kutub dan Sepatu Kutub ... 6
Gambar 2.3 Sikat dan Komotator ... 6
Gambar 2.4 a) Arah fluksi pada kumparan medan dari utara ke selatan ... 7
Gambar 2.4 b) Fluksi pada konduktor ketika dialiri arus ... 7
Gambar 2.5 Pengaruh penempatan konduktor berarus dalam medan Magnet ... 9
Gambar 2.6 Prinsip perputaran motor arus searah ... 10
Gambar 2.7 Fluksi yang dihasilkan oleh kumparan medan... 13
Gambar 2.8 Fluksi yang dihasilkan oleh Kumparan jangkar ... 14
Gambar 2.9 Hasil kombinasi antara fluksi medan dan fluksi jangkar ... 14
Gambar 2.10 Timbulnya Bunga Api akibat Reaksi Jangkar ... 16
Gambar 2.11 Pelemahan ggm akibat pergeseran bidang netral ... 17
Gambar 2.12 Pergeseran garis netral akibat reaksi jangkar... 18
Gambar 2.13 Kutub magnet utama dan kutub bantu ... 18
Gambar 2.14 Rangkaian ekivalen motor arus searah penguatan bebas ... 19
Gambar 2.15 Rangkaian ekivalen motor arus searah penguatan seri ... 21
Gambar 2.16 Rangkaian ekivalen motor arus searah penguatan shunt ... 22
Gambar 2.17 Rangkaian ekivalen motor arus searah penguatan kompon Pendek ... 23
Gambar 2.1 Rangkaian ekivalen motor arus searah Penguatan kompon Panjang ... 24
DAFTAR TABEL
Tabel 4.1 Data pengujian posisi sikat motor dc shunt tanpa kutub bantu ... 40 Tabel 4.2 Data pengujian posisi sikat motor dc shunt dengan kutub bantu 40 Tabel 4.3 Data pengujian posisi sikat motor dc kompon pendek
Tanpa kutub bantu ... 41 Tabel 4.4 Data pengujian posisi sikat motor dc kompon pendek
dengan kutub bantu ... 41 Table 4.5 Data pengujian posisi sikat motor dc kompon panjang
Tanpa kutub bantu ... 42 Tabel 4.6 Data pengujian posisi sikat motor dc kompon panjang
dengan kutub bantu ... 42 Tabel 4.7 Hasil Perhitungan Torsi akibat pengaruh Posisi Sikat
Motor DC Shunt Tanpa Kutub Bantu ... 44 Tabel 4.8 Hasil Perhitungan Torsi akibat pengaruh posisi sikat
Motor dc shunt dengan kutub bantu ... 46 Tabel 4.9 Hasil Perhitungan Torsi akibat pengaruh posisi sikat motor dc
kompon pendektanpa kutub bantu... 47 Tabel 4.10 Hasil Perhitungan Torsi akibat pengaruh posisi sikat motor dc
kompon pendek dengan kutub bantu ... 49 Tabel 4.11 Hasil Perhitungan Torsi akibat pengaruh posisi sikat motor dc
kompon panjang tanpa kutub bantu ... 50 Tabel 4.12 Hasil Perhitungan Torsi akibat pengaruh posisi sikat motor dc
kompon panjang dengan kutub bantu... 51 Tabel 4.13 Perbandingan Kecepatan Motor DC Shunt dan kompon
baik Tanpa Kutub maupun Dengan Kutub Bantu ... 52 Tabel 4.14 Perbandingan Torsi Motor DC Shunt dan kompon



![Gambar 2.4 [2].](https://thumb-ap.123doks.com/thumbv2/123dok/1030072.632910/32.595.117.532.543.695/gambar.webp)
