59 DAFTAR PUSTAKA
[1] Zuhal:”Dasar Teknik Tenaga Listrik dan Elektronika Daya”, Penerbit Gramedia Pustaka Utama, Jakarta, 2000.
[2] Wijaya, Mochtar. 2001. Dasar-Dasar Mesin Listrik. Djambatan. Jakarta.
[3] Theraja B. L and Theraja A. K, “Electrical Technology”, Nirja Construction &
Development company Pvt. Ltd., New Delhi, Volume II,22nd Edition, 1997.
[4] T. Thyagarajan, “Fundamentals of Electrical and Electronics Engineering”,
SciTech publications (Ind.) Pvt. Ltd., 3rd Edition, October 2000
[5] Lister, Eugene C, Mesin dan Rangkaian Listrik, Edisi ke-6, Penerbit Erlangga, Jakarta : 1986
[6] Mehta,V.K. and Rohit Mehta,Principles of Electrical Enginering And Electronics, S. Chand & Company Ltd, New Delhi : 2000
[7] Rijono,Yon, Dasar Teknik Tenaga Listrik, Andi Offset, Yogyakarta : 1997 [8] Sumanto, Mesin Arus Searah, Andi Offset, Yogyakarta : 1991
[9] Djoko, Achayanto. Ir. M.SC. EE. 2001. “ Mesin mesin Elektrik “. Edisi ke -4, Penerbit Erlangga. Jakarta
[10] Elgerd, Olle I. 1976. ”Basic Electric Power Engineering”, AddisonWesley Publishing Company, Florida.
[11] P.S. Bimbra, “Electrical Machinery”, Khana Publisher,1990.
44 BAB III
METODE PESELITIAS
3.1 Tempat dan Waktu Penelitian
Pengambilan data dalam penelitian tugas Akhir ini dilakukan di Laboratorium Konversi Energi Listrik FT-USU, pada tanggal 20 November 2015 pukul 18.00 s/d 23.00 WIB.
3.2 Bahan dan Peralatan Dua buah Mesin DC
a) Mesin DC-1 : TYP Gd 110/110 G-Mot Nr. 7983733 sebagai motor b) Mesin DC-2 : TYP Gd 110/110 G-Mot Nr. 7983745 sebagai generator Tahanan jangkar = 3,8 ohm
Tahanan seri = 0,6 ohm Tegangan nominal = 220 V P = 1,2 KW
Kutub Bantu
Alat Ukur Multimeter Kabel Penghubung Tahanan Geser Tachometer
3.3 Variabel yang Diamati
Variabel-variabel yang diamati pada penelitian ini meliputi : - Pergeseran sikat yang diubah-ubah
45 - Besar nilai arus dimana IL=Ia=Is
- Putaran motor
- Besar nilai tegangan terminal motor dc 3.4 Prosedur Penelitian
Langkah-langkah penelitian yang ditempuh dalam penelitian ini meliputi :
3.4.1 Tahap Persiapan
Tujuannya adalah untuk mengkoordinasikan agar penelitian dapat berjalan dengan lancar. Langkah-langkah yang dilakukan adalah :
1. Mempersiapkan alat dan bahan untuk penelitian.
2. Mengkondisikan Objek Penelitian
Objek penelitian yang dimaksudkan adalah motor dc shunt, sikat, kutub bantu, dan beban. Adapun langkah mengkondisikan objek penelitian ini meliputi:
a. Memastikan bahwa motor dc shunt dapat beroperasi dan mengatur beberapa posisi sikat, menambahkan kutub bantu, beserta beban.
b. Memeriksa power supply dan multitmeter apakah sudah disetting dengan benar.
3.Mengkondisikan Alat Ukur Alat ukur sebagai pengambil data harus memiliki validitas yang baik. Untuk mendapatkan validitas yang baik alat ukur harus disetting sesuai dengan seperti skala operasi.
3.4.2 Tahap Pengambilan Data
46 Merangkai rangkaian percobaan Sebelum melakukan percobaan,lalu merangkai rangkaian percobaan sesuai dengan percobaan yang dilakukan.Adapun rangkaian percobaan yang akan digunakan seperti yang terlihat berikut:
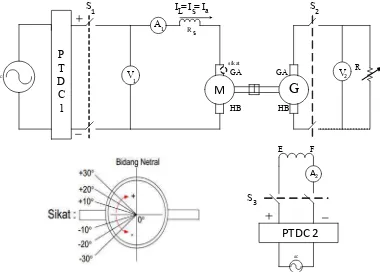
3.4.3 Rangkaian percobaan Pergeseran Sikat Motor DC Seri Tanpa Kutub Komutasi Kondisi Berbeban Metode Field’s Test
AC
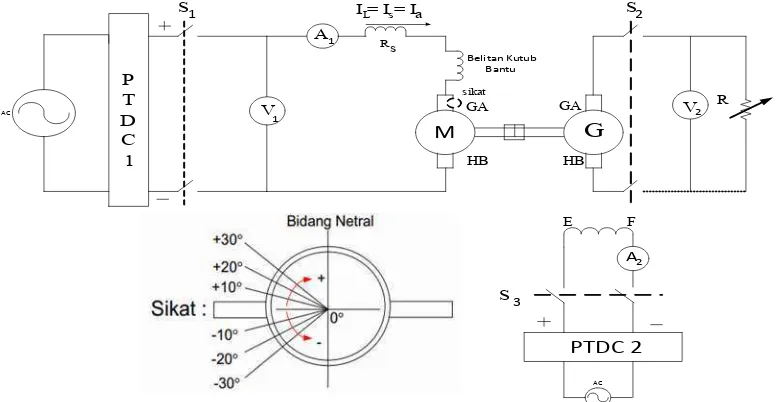
47 3.4.4 Rangkaian percobaan Pergeseran Sikat Motor DC Seri Dengan Kutub
Komutasi Kondisi Berbeban Metode Field’s Test
AC
Gambar 3.2 Rangakaian percobaan Pergeseran Sikat Motor DC Seri Dengan Kutub Komutasi
3.5 Prosedur Pengujian
3.5.1 Pengujian Pergeseran Sikat Motor DC Seri Tanpa Kutub komutasi Kondisi Berbeban Metode Field’s Test
Adapun prosedur percobaannya adalah :
1. Rangkaian dibuat seperti pada Gambar 3.1 dimana semua switch dalam keadaan terbuka dan PTDC dalam keadaan minimum. 2. Atur besar RL menjadi 120 Ohm.
3. Atur posisi sikat padap posisi -300.
4. Tutup saklar S3, naikkan PTDC 2 sampai 0,64 ampere lalu tutup
saklar S2.
5. Tutup saklar S1, naikkan PTDC 1 sampai 85 volt.
48 7. Turunkan PTDC 2 hingga posisi nol lalu turunkan putaran dengan
mengatur PTDC 1 hingga posisi nol.
8. Buka saklar S1,S2 dan S3 lalu atur posisi sikat sesuai dengan yang
diinginkan.Kemudian ulangi langkah 3, 4, 5, dan 6 hingga diperoleh data tiap posisi sudut yang diinginkan.
9. Pengujian selesai.
3.5.2 Pengujian Pergeseran Sikat Motor DC Seri dengan Kutub komutasi Kondisi Berbeban Metode Field’s Test
Adapun prosedur percobaannya adalah :
1. Rangkaian dibuat seperti pada Gambar 3.2 dimana semua switch dalam keadaan terbuka dan PTDC dalam keadaan minimum.
2. Atur besar RL menjadi 120 Ohm.
3. Atur posisi sikat padap posisi -300.
4. Tutup saklar S3, naikkan PTDC 2 sampai 0,64 ampere lalu tutup
saklar S2.
5.Tutup saklar S1,naikkan PTDC 1 sampai 85 volt.
6. Catat nilai V1,V2,A1,A2 dan n pada kondisi ini.
7. Turunkan PTDC 2 hingga posisi nol lalu turunkan putaran dengan mengatur PTDC 1 hingga posisi nol.
8. Buka saklar S1,S2 dan S3 lalu atur posisi sikat sesuai dengan yang
diinginkan. Kemudian ulangi langkah 3, 4, 5, dan 6 hingga diperoleh data tiap posisi sudut yang diinginkan.
49 BAB 4
HASIL PESELITIAS DAS PEMBAHASAS 4.1 Umum
Motor arus searah adalah suatu mesin listrik yang berfungsi mengubah energi listrik arus searah (DC) menjadi energi gerak atau energi mekanik,dimana energi gerak mekanik tersebut berupa putaran rotor.Proses pengkonversian energi listrik menjadi energi mekanik tersebut berlangsung di dalam medan magnet.
Motor arus searah penguatan seri adalah motor arus searah dimana belitan medannya dihubungkan langsung dengan jangkarnya sehingga arus yang melalui belitan medan seri ini sama dengan arus yang mengalir pada jangkar.
Pada saat motor arus searah penguatan seri diberi beban maka pada kumparan stator akan mengalir arus jangkar.Dan arus ini akan menimbulkan fluksi jangkar yang akan berinteraksi dengan fluksi yang dihasilkan oleh kumparan medan rotor (fluksi utama).Akibatnya akan terjadi perubahan bentuk fluksi utama.Pengaruh reaksi jangkar ini akan menyebabkan adanya percikan bunga api pada sikat-sikat motor.
50 dimana data-data yang diperoleh dari hasil pengukuran yang dilakukan di Laboratorium Konversi Energi Listrik FT-USU.Motor yang digunakan pada pengujian ini adalah motor DC AEG tipe Gd 110/110 G-Mot Nr. 7983745 dengan spesifikasi sebagai berikut :
51 Vt = 85 Volt Ra = 3,8 Ω
RL = 120 Ω RKB = 2 Ω
Rs = 0,6 Ω
Tabel 4.2 Data Pengujian Pergeseran Sikat Motor DC Seri Dengan Kutub Komutasi
Dari data-data Tabel 4.1,maka akan dilakukan perhitungan untuk mendapatkan efisiensi dan torsi.
52
53
Dengan melakukan perhitungan seperti di atas pada tiap pergeseran sikat, maka akan diperoleh efisiensi dan torsinya seperti pada Tabel 4.3 berikut ini :
Tabel 4.3 Hasil Perhitungan Efisiensi Dan Torsi Pergeseran Sikat Motor DC Seri Tanpa Kutub Komutasi
4.3.2 Pengujian Pergeseran Sikat Motor DC Seri dengan Kutub Komutasi
Dari data-data Tabel 4.2,maka akan dilakukan perhitungan untuk mendapatkan efisiensi dan torsi.
1. Posisi Sikat -30 Ea = Vt –Rs.Ia
54 =82,486 volt
Daya masukan sistem(Total) Pinsistem = Vt x Ia
= 85 x 4,19
= 356,15 watt
Daya Keluaran sistem Poutsistem = Vgenerator x Igenerator
= 154 x 1,55
= 238,7 watt
Rugi Total Sistem,Wtotal= Pinsistem - Poutsistem
=356,15 – 238,7 =117,45 watt
Rugi Tembaga jangkar dan medan,Wcu = ( Ra + 2 Rs) x Ia2 + Ig2 x Ra
=(3,8+2.0,6) x4,192 +1,552 x 3,8
= 96,91 watt
Stray Losses/mesin = (Wtotal – Wcu ) : 2
=(117,45 – 96,91) : 2 =10,27 watt
Pin pada Motor = Ea x Ia
= 82,486 x 4,19
= 345,61 watt
Rugi tembaga kumparan jangkar pada motor, Pcu = (Ra+Rs+Rkb) x Ia2
= (3,8+0,6+2) x4,192
55
Dengan melakukan perhitungan seperti di atas pada tiap pergeseran sikat, maka akan diperoleh efisiensi dan torsinya seperti pada Tabel 4.4 berikut ini :
56 Dari hasil perhitungan di atas maka didapat perbandingan efisiensi dan torsi antara pergeseran sikat motor dc seri tanpa kutub komutasi dengan motor dc seri dengan kutub komutasi seperti pada tabel 4.5 dan tabel 4.6 sebagai berikut
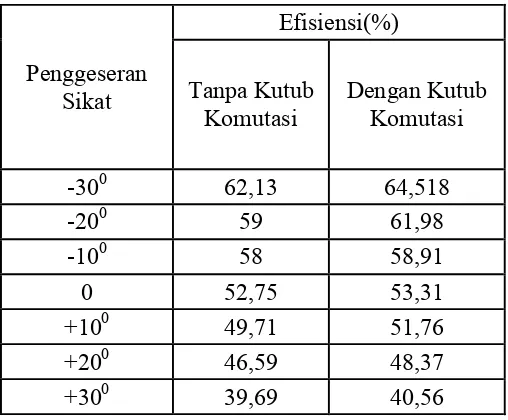
Tabel 4.5 Perbandingan Efisiensi Motor DC Seri Tanpa Kutub Komutasi Dengan Motor DC Seri Dengan Kutub komutasi
Penggeseran Sikat
Efisiensi(%)
Tanpa Kutub
Komutasi Dengan Kutub Komutasi
-300 62,13 64,518 Dengan Motor DC Seri Dengan Kutub komutasi
Penggeseran Sikat
Torsi (N-m) Tanpa Kutub
Komutasi Dengan Kutub Komutasi
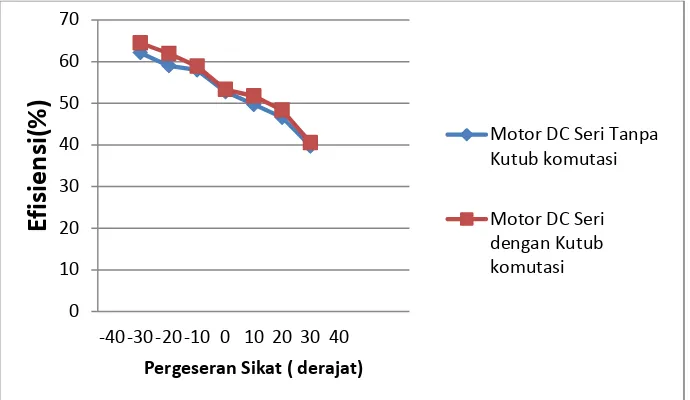
57 Dari tabel 4.5 dan tabel 4.6 maka akan didapat grafik perbandingan efisiensi dan torsi motor dc seri tanpa kutub komutasi vs motor dc seri dengan kutub komutasi yang ditunjukkan oleh Gambar 4.1 dan Gambar 4.2 sebagai berikut:
58 BAB 5
KESIMPULAS DAS SARAS
5.1 Kesimpulan
Dari hasil percobaan dan pembahasan yang dilakukan,diperoleh kesimpulan sebagai berikut:
1. Pada masing-masing motor DC yang diuji,efisiensi yang tertinggi diperoleh pada pergeseran sikat -300 yaitu pada motor DC seri tanpa kutub komutasi sebesar 62,13 %, sedangkan pada motor DC seri dengan kutub komutasi sebesar 64,51.
2. Pada masing masing motor DC yang diuji,torsi yang tertinggi diperoleh pada posisi sikat +300 yaitu pada motor DC seri tanpa kutub komutasi
sebesar 2,54 N-m, sedangkan pada motor DC seri dengan kutub komutasi sebesar 2,81 N-m.
3. Dari hasil analisa dapat dilihat bahwa ada peningkatan nilai efisiensi dan torsi setelah ditambahkan kutub komutasi dan posisi sikat yang digeser.
5.2 Saran
Adapun saran dari penulis sebagai pengembangan dari Tugas Akhir ini adalah sebagai berikut
1. Disarankan untuk menguji pada motor DC lainnya
2. Pada pengujian selanjutnya disarankan untuk mengubah-ubah beban motor DC.
5
mekanik,dimana energi gerak mekanik tersebut berupa putaran rotor.Proses
pengkonversian energi listrik menjadi energi mekanik tersebut berlangsung di
dalam medan magnet [1].
Berdasarkan konstruksinya, motor arus searah secara umum terdiri atas
bagian yang diam (stator) dan bagian yang berputar (rotor).Pada bagian yang
diam merupakan tempat diletakkannya kumparan medan yang berfungsi untuk
menghasilkan fluksi magnet sedangkan pada bagian yang berputar ditempati oleh
rangkaian jangkar seperti kumparan jangkar, komutator dan sikat [2].
Motor arus searah bekerja berdasarkan prinsip interaksi antara dua fluksi
magnetik.Dimana kumparan medan akan menghasilkan fluksi magnet yang
arahnya dari kutub utara menuju kutub selatan dan kumparan jangkar akan
menghasilkan fluksi magnet yang melingkar.Interaksi antara kedua fluksi magnet
ini akan menimbulkan suatu gaya sehingga akan menimbulkan torsi[3]
Motor arus searah biasanya digunakan terutama untuk melayani beban
dengan torsi start yang besar dan memiliki efisiensi yang tinggi sehingga lebih
unggul bila dibandingkan dengan motor induksi ataupun motor sinkron[2].
Pada penggunaannya motor arus searah harus disesuaikan dengan
kebutuhan agar ekonomis dan efisiensi.Untuk memenuhi semuannya ini,maka
6
Disaat motor diberi beban, maka fluksi akan berkurang dan amper-turn
medan akan berkurang juga. Hal ini disebabkan oleh karena adanya reaksi
jangkar[2].
Reaksi jangkar sangat berpengaruh terhadap kinerja,efisiensi, dan torsi dari motor
tersebut.Untuk mengurangi reaksi jangkar ini,ada tiga cara atau teknik yang
dapat dilakukan yaitu dengan melakukan pergeseran sikat, menambahkan kutub
kutub komutasi, dan belitan kompensasi[4].
2.2 Konstruksi Motor Arus Searah
Secara umum motor arus searah memiliki konstruksi yang sama, terbagi
atas dua bagian, yaitu : bagian yang diam dan bagian yang bergerak. Bagian yang
diam disebut stator dan bagian yang berputar/bergerak disebut rotor. Untuk lebih
jelasnya dapat dilihat pada Gambar di bawah ini [1]:
7
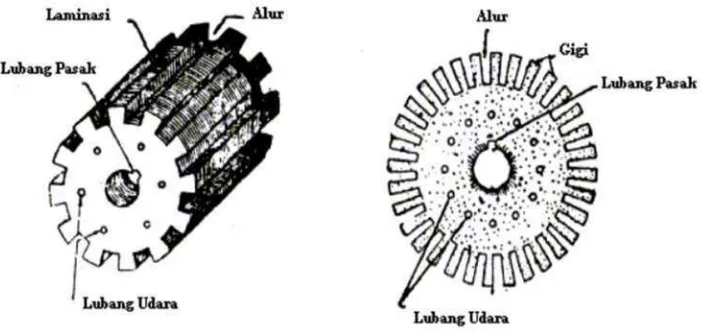
Gambar 2.2 Konstruksi motor arus searah bagian rotor
Keterangan dari gambar tersebut adalah:
1 Badan Motor (Rangka)
Rangka motor arus searah adalah tempat meletakkan sebagian besar
komponen mesin dan melindungi bagian mesin.Untuk itu rangka harus
dirancang memiliki kekuatan mekanis yang tinggi untuk mendukung
komponen-komponen mesin tersebut.Rangka (frame atau yoke) mesin arus
searah seperti juga mesin mesin listrik lainnya secara umum memiliki dua
fungsi,yaitu:1.Untuk membawa fluks magnetik yang dihasilkan oleh
kutub-kutub magnet. 2.Merupakan sarana pendukung mekanik untuk
mesin secara keseluruhan.Rangka dibuat dengan menggunakan bahan
ferromagnetik yang memiliki permeabilitas tinggi.Rangka biasanya terbuat
dari baja tuang (cast steel) atau baja lembaran (rolled steel) yang berfungsi
sebagai penopang mekanis dan juga sebagai bagian dari rangkaian magnet.
Biasanya pada badan (rangka) motor terdapat papan nama (name plate)
yang bertuliskan spesifikasi umum atau data data teknik dari mesin
8
2 Kutub medan
Kutub medan terdiri atas inti kutub dan sepatu kutub.Sepatu kutub yang
berdekatan dengan celah udara dibuat lebih besar dari badan inti.Dimana
fungsinya adalah untuk menahan kumparan medan di tempatnya dan
menghasilkan distribusi fluksi yang lebih baik yang tersebar di seluruh jangkar
dengan menggunakan permukaan yang melengkung.Inti kutub terbuat dari
laminasi pelat-pelat baja yang terisolasi satu sama lain.Sepatu kutub dilaminasi
dan dibaut ke inti kutub.Maka kutub medan (inti kutub dan sepatu kutub)
direkatkan bersama-sama kemudian dibaut pada rangka.Pada inti kutub ini
dibelitkan kumparan medan yang terbuat dari kawat tembaga yang berfungsi
untuk menghasilkan fluksi magnetik[7].
Gambar 2.3 Konstruksi Kutub dan Penempatannya
3 Sikat
Sikat adalah jembatan bagi aliran arus ke lilitan jangkar.Dimana permukaan
sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik.
Sikat memegang peranan penting untuk terjadinya komutasi.Sikat sikat terbuat
9
beberapa hal dibuat dari campuran karbon dan logam tembaga.Sikat harus
lebih lunak daripada segmen-segmen komutator supaya gesekan yang terjadi
antara segmen-segmen komutator dan sikat tidak mengakibatkan ausnya
komutator[11].
Gambar 2.4 Sikat Pada Motor DC
4 Kumparan Medan
Kumparan medan adalah susunan konduktor yang dibelitkan pada inti kutub.
Dimana konduktor tersebut terbuat dari kawat tembaga yang berbentuk bulat
atapun persegi.Rangkaian medan yang berfungsi untuk menghasilkan fluksi
utama dibentuk dari kumparan pada setiap kutub.Pada aplikasinya rangkaian
medan dapat dihubungkan dengan kumparan jangkar baik seri maupun paralel
dan juga dihubungkan tersendiri langsung kepada sumber tegangan sesuai
dengan jenis penguatan pada motor[6].
5 Kumparan Jangkar
Kumparan jangkar pada motor arus searah merupakan tempat dibangkitkannya
ggl induksi.Pada motor arus searah penguatan kompon pendek kumparan
medan serinya diparalel terhadap kumparan jangkar,sedangkan pada motor
10
terhadap kumparan jangkar.Konstruksi kumparan jangkar pada rotor ada tiga
macam yaitu[12]:
1. Kumparan jerat (lap winding)
2. Kumparan gelombang (wave winding)
3. Kumparan zig-zag (frog-leg winding)
6 Inti Jangkar
Inti jangkar yang umumnya digunakan dalam motor arus searah adalah
berbentuk silinder yang diberi alur-alur pada permukaannya untuk tempat
melilitkan kumparan jangkar tempat terbentuknya ggl induksi.Inti jangkar
terbuat dari bahan ferromagnetik,dengan maksud agar komponen-komponen
(lilitan jangkar) terletak dalam daerah yang induksi magnetnya besar supaya
ggl induksi dapat bertambah besar.Bahan yang digunakan untuk jangkar ini
merupakan sejenis campuran baja silicon.Seperti halnya inti kutub magnet
maka jangkar dibuat dari bahan berlapis-lapis tipis dengan tujuan untuk
mengurangi panas yang terbentuk karena adanya arus linier seperti ditunjukkan
pada Gambar di bawah ini[8]:
11
7 Komutator
Untuk memperoleh tegangan searah diperlukan alat penyearah yang disebut
komutator dan sikat.Fungsi komutator untuk fasilitas penghubung arus dari
konduktor jangkar,sebagai penyearah mekanik,yang bersama-sama dengan
sikat membuat sesuatu kerjasama yang disebut komutasi.Komutator terdiri dari
sejumlah segmen tembaga yang berbentuk lempengan-lempengan yang dirakit
ke dalam silinder yang terpasang pada poros.Di mana tiap-tiap lempengan atau
segmen-segmen komutator terisolasi dengan baik antara satu sama lainnya.
Bahan isolasi yang digunakan pada komutator adalah mika.Agar dihasilkan
tegangan arus searah yang konstan,maka komutator yang digunakan hendaknya
dalam jumlah yang besar[10].
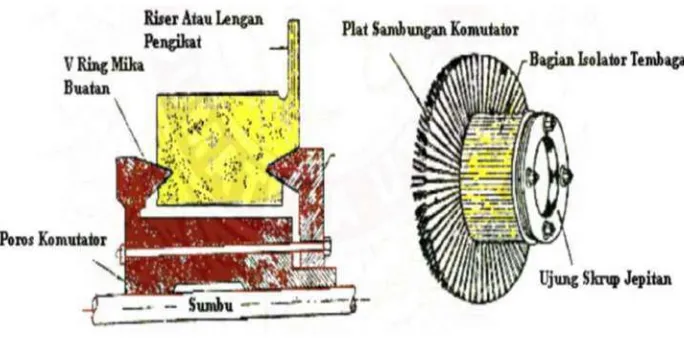
Gambar 2.6 Komutator
8 Celah Udara
Celah udara merupakan ruang atau celah antara permukaan jangkar dengan
permukaan sepatu kutub yang menyebabkan jangkar tidak bergesekan dengan
12
2.3 Prinsip Kerja Motor Arus Searah
Sebuah konduktor mempunyai medan magnet disekelilingnya
apabila konduktor tersebut dialiri oleh arus listrik. Pada saat konduktor
yang dialiri arus listrik ditempatkan pada suatu medan magnet, maka
konduktor akan mengalami gaya mekanik, seperti diperlihatkan pada
Gambar di bawah ini[2] :
Gambar 2.7 Pengaruh Penempatan Konduktor yang Dialiri Arus Listrik
Dalam Medan Magnet
Pada Gambar 2.7.a menggambarkan sebuah konduktor yang dialiri
arus listrik menghasilkan medan magnet disekelilingnya. Arah medan
magnet yang dihasilkan oleh konduktor dapat diperoleh dengan
menggunakan kaidah tangan kanan. Untuk lebih jelasnya perhatikan
Gambar 2.8 berikut ini[6].
13
Kuat medan tergantung pada besarnya arus yang mengalir pada
konduktor.Sedangkan Gambar 2.7.b menunjukkan sebuah medan magnet
yang diakibatkan oleh kutub-kutub magnet utara dan selatan. Arah medan
magnet adalah dari kutub utara menuju kutub selatan[3].
Pada saat konduktor dengan arah menjauhi pembaca ditempatkan
di dalam medan magnet seragam,maka medan gabungnya akan seperti
yang ditunjukkan pada Gambar 2.7.c Daerah di atas konduktor,medan
yang ditimbulkan konduktor adalah dari kiri ke kanan,atau pada arah yang
sama dengan medan utama.Sementara di bawahnya,garis-garis magnet dari
konduktor arahnya berlawanan dengan medan utama.Hasilnya adalah
memperkuat medan atau menambah kerapatan fluksi di atas konduktor dan
melemahkan medan atau mengurangi kerapatan fluksi di bawah
konduktor.
Dalam keadaan ini fluksi di daerah di atas konduktor yang
kerapatannya bertambah atau mengusahakan gaya ke bawah kepada
konduktor untuk mengurangi kerapatannya.Hal ini menyebabkan
konduktor mengalami gaya berupa dorongan ke arah bawah.Begitu juga
halnya bila arah arus dalam konduktor dibalik.Kerapatan fluksi yang
berada di bawah konduktor akan bertambah sedangkan kerapatan fluksi di
atas konduktor berkurang.Sehingga konduktor akan mendapatkan gaya
tolak ke arah atas.Konduktor yang mengalirkan arus dalam medan magnet
cenderung bergerak tegak lurus terhadap medan[9].
Prinsip kerja sebuah motor arus searah dapat dijelaskan dengan
14
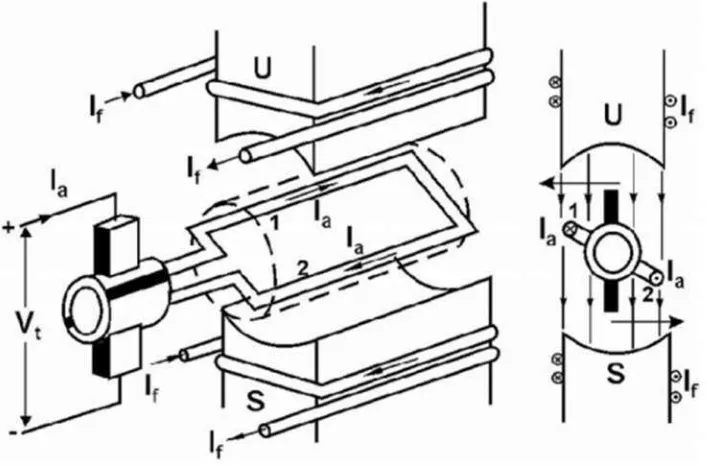
Gambar 2.9 Prinsip perputaran motor arus searah
Saat kumparan medan dihubungkan dengan sumber tegangan,mengalir
arus medan If pada kumparan medan karena rangkaian tertutup sehingga
menghasilkan fluksi magnet yang arahnya dari kutub utara menuju kutub selatan.
Sedangkan pada kumparan jangkar mengalir arus jangkar Ia,sehingga pada
konduktor kumparan jangkar timbul fluksi magnet yang melingkar.Fluksi jangkar
ini akan memotong fluksi dari kumparan medan sehingga menyebabkan
perubahan kerapatan fluksi dari medan utama.Hal ini menyebabkan jangkar
mengalami gaya sehingga menimbulkan torsi[1].
Gaya yang dihasilkan pada setiap konduktor dari sebuah jangkar
merupakan akibat aksi gabungan medan utama dan medan di sekeliling
konduktor.Gaya yang dihasilkan berbanding lurus dengan besar fluksi medan
utama dan kuat medan di sekeliling konduktor. Medan di sekeliling masing
15
pada konduktor tersebut.Arah gaya ini dapat ditentukan dengan kaidah tangan
kiri[9].
Gambar 2.10 Aturan tangan kiri untuk prinsip kerja motor DC
Besarnya gaya F = B . I . l . sin θ,karena arus jangkar I tegak lurus dengan
arah induksi magnetik B maka besar gaya yang dihasilkan oleh arus yang
mengalir pada konduktor jangkar yang ditempatkan dalam suatu medan magnet
adalah :
F = B . I . l Newton . . . . . . .(2.1)
Dimana : F = gaya Lorentz [Newton]
I = arus [Ampere]
l = panjang penghantar [meter]
B = kerapatan fluksi [Webber/m2]
Sedangkan torsi yang dihasilkan motor adalah :
T = F . r . . . .. . . .(2.2)
Bila torsi yang dihasilkan motor lebih besar dari pada torsi beban maka motor
akan berputar.Besar torsi beban dapat dituliskan dengan[1]:
16
K = . . . . .(2.4)
Dimana : T = torsi [N-m]
r = jari-jari [m]
K = konstanta [tergantung pada ukuran fisik motor]
Φ = fluksi setiap kutub
Ia = arus jangkar [A]
p = jumlah kutub
z = jumlah konduktor
a = cabang paralel
2.4 Permasalahan dengan Komutasi Pada Mesin Arus Searah
Dalam proses komutasi (penyearahan) mesin arus searah terdapat dua masalah utama yang mempengaruhi kerja mesin tersebut yaitu[2]:
- Reaksi jangkar - Tegangan (L di/dt)
2.4.1 Reaksi Jangkar
Reaksi jangkar merupakan medan magnet yang disebabkan
oleh mengalirnya arus pada jangkar, dimana jangkar tersebut berada di dalam
magnet.Reaksi jangkar menyebabkan terjadinya 2 hal yaitu [3] :
1.Demagnetisasi atau penurunan kerapatan fluksi medan utama.
2.Magnetisasi silang.
Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar
tidak dialiri oleh arus,maka dengan mengabaikan pengaruh celah udara,
jalur fluksi ideal untuk kutub utama dari motor arus searah dua kutub dari
17
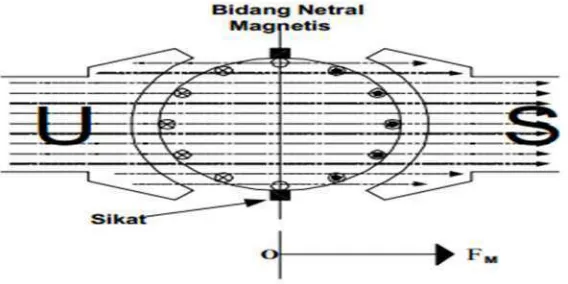
Fluksi didistribusikan simetris terhadap bidang netral magnetis.
Sikat ditempatkan bertepatan dengan bidang netral magnetis.Bidang
netral magnetis didefinisikan sebagai bidang di dalam motor di mana
konduktor bergerak sejajar dengan garis gaya magnet sehingga gaya gerak
listrik induksi konduktor pada bidang tersebut adalah nol.Seperti yang terlihat
dari gambar 2.11 sikat selalu ditempatkan di sepanjang bidang netral magnetis.
Oleh karena itu bidang netral magnetis juga disebut sebagai sumbu komutasi
karena pembalikan arah arus jangkar berada pada bidang tersebut.Vektor OFM
mewakili besar dan arah dari fluksi medan utama,di mana vektor ini tegak
lurus terhadap bidang netral magnetis.
Gambar 2.11 Fluksi Yang Dihasilkan Oleh Kumparan Medan
Sewaktu hanya konduktor jangkar saja yang dialiri oleh arus listrik sementara
kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar timbul
18
Gambaran arah garis gaya magnet ditunjukkan pada gambar 2.12 berikut ini :
Gambar 2.12 Fluksi Yang Dihasilkan Oleh Kumparan Jangkar
Penentuan arah dari garis gaya magnet yang diakibatkan oleh arus jangkar
ditentukan dengan aturan putaran sekrup (cork-screw rule).Besar dan arah garis
gaya magnet tersebut diwakili oleh vektor OFA yang sejajar dengan bidang
netral magnetis.Pada prakteknya, sewaktu mesin beroperasi maka konduktor
jangkar dan konduktor medan sama- sama dialiri oleh arus listrik,distribusi
fluksi resultan diperoleh dari menggabungkan kedua fluksi tersebut.Oleh
karena itu distribusi fluksi medan utama yang melalui jangkar tidak lagi
simetris tetapi sudah mengalami pembelokan saat mendekati konduktor yang
dialiri arus tersebut.Hal tersebut dikarenakan pengaruh fluksi jangkar yang
dapat dilihat dari gambar 2.13 berikut ini[10]:
19
Fluksi yang dihasilkan oleh gaya gerak magnet (ggm) jangkar menentang
fluksi medan utama pada setengah bagian dari salah satu kutubnya dan
memperkuat fluksi medan utama pada setengah bagian yang lain.Hal ini jelas
akan menyebabkan penurunan kerapatan fluksi pada setengah bagian dari salah
satu kutubnya dan terjadi kenaikan pada setengah bagian yang lain di kutub
yang sama.Efek dari intensitas medan magnet atau lintasan fluksi pada jangkar
yang memotong lintasan fluksi medan utama ini disebut sebagai reaksi jangkar
magnetisasi-silang (crossmagnetization)[6].
Magnetisasi-silang ini juga menyebabkan pergeseran bidang netral.Pada
Gambar 2.13 terlihat bahwa vektor OFr merupakan resultan vektor OFA dan
OFM, serta posisi bidang netral magnetis yang baru, di mana selalu tegak lurus
terhadap vektor OFr. Bidang netral magnetis motor yang baru bergeser sejauh
β karena posisi bidang netral magnetis ini selalu tegak lurus terhadap vektor
OF.Dengan pergeseran bidang netral ini maka sikat juga akan bergeser sejauh
pergeseran bidang netral magnetis.Hal ini dapat menimbulkan bunga api di
segmen komutator dekat sikat.Kebanyakan mesin listrik bekerja pada
kerapatan fluksi yang dekat dengan titik jenuhnya,sehingga dapat
menimbulkan kejenuhan magnetik.
2.4.2 Tegangan L.di/dt
Masalah utama kedua adalah tegangan L.di/dt yang terjadi pada segmen
komutator yang terhubung singkat oleh sikat-sikat (inductive kick).Misalkan
arus pada sikat (IA) sebesar 400 A,arus tiap jalur ½ IA sebesar 200 A. Pada saat
segmen komutator terhubung singkat,arus yang melalui segmen komutator
20
dan mesin memiliki 50 segmen komutator,maka tiap segmen komutator
berpindah pada sikat selama t=0.0015 detik.Sedangkan rentang perubahan arus
terhadap waktu pada rangkaian terhubung singkat rata-rata sebesar di/dt =
400/0.0015=266.667 Amper/detik.
Dengan induktansi yang kecil pada rangkaian,tegangan V = L.di/dt
yang signifikan akan diinduksikan pada segmen komutator.Tegangan tinggi ini
secara alami menyebabkan adanya percikan bunga api pada sikat-sikat
mesin[7].
2.4.3 Mengatasi Masalah Komutasi
Ada tiga cara untuk mengatasi permasalahan yang timbul akibat proses
komutasi, yaitu[2]:
1. Pergeseran sikat (brush shifting)
2. Kutub kutub komutasi (comutating poles/interpoles)
3. Belitan kompensasi (kompensating windings)
2.4.3.1 Penggeseran Sikat (Brush Shifting)
Sikat berfungsi sebagai jembatan bagi aliran arus ke kumparan
jangkar. Salah satu akibat yang ditimbulkan reaksi jangkar adalah
pergeseran atau perpindahan garis netral searah dengan arah putaran
motor.Dalam hal ini sikat yang semula segaris dengan garis netral,kini
bergeser beberapa derajat dari garis netral.Untuk itu sikat dipindahkan
seirama dengan perpindahan bidang netral.Namun dalam penerapannya
hal ini cukup sulit karena jarak perpindahan bidang netralnya sangat
21
setiap ada perubahan besarnya beban yang dipikul,maka jarak
perpindahan bidang netralnya pun berpindah.Sehingga sikat juga harus
dirubah setiap saat,seirama dengan perubahan jarak perpindahan bidang
netral.Selain itu pergeseran sikat akan memperburuk melemahnya
fluksi akibat reaksi jangkar mesin.
Adapun efek diperburuknya fluks akibat reaksi jangkar dapat dilihat pada
Gambar 2.14 berikut ini [2] :
Gambar 2.14 Pelemahan ggm akibat pergeseran bidang netral
Pada Gambar 2.14(a)diperlihatkan kondisi ketika bidang netral
mesin bergeser dan sikat mesin masih tetap pada posisi semula.Ggm
22
pada Gambar 2.14 (b) terlihat bidang netral yang bergeser disertai
dengan bergesernya sikat mesin.Akibat pergeseran tersebut ggm
resultannya melemah sedemikian rupa.Hal tersebut dapat dilihat pada
Gambar 2.14 (d) [2].
2.4.3.2 Kutub-kutub komutasi (comutating poles/interpoles)
Untuk mengembalikan garis netral ke posisi semula maka dipasang
kutub-kutub komutasi (comutating poles /interpole).Kutub k u t u b
k o m u t a s i ini berupa kutub magnet yang ukuran fisiknya lebih kecil
dari kutub utama.Kutub k u t u b k o m u t a s i (interpole) ini
dihubungkan seri terhadap kumparan rotor.Kutub bantu akan
memperpendek jalannya garis medan magnet. Dengan dipasang kutub bantu
maka garis netral akan kembali ke posisi semula dan kedudukan sikat tegak
lurus dengan kutub utamanya[4].
23
Gambar 2.16 Kutub magnet utama dan kutub bantu
2.4.3.3 Belitan kompensasi (kompensating windings)
Belitan kompensasi ini dihubungkan seri terhadap kumparan,rotor
belitan ini bertujuan untuk mengurangi penyimpangan yang timbul akibat
reaksi jangkar. Fluks yang ditimbulkan oleh reaksi jangkar
diimbangi oleh fluks yang ditimbulkan oleh belitan kompensasi yang
besarnya sama dan berlawanan.Ketika beban berubah maka reaksi jangkar
yang berubah akan selalu diimbangi oleh belitan kompensasi,sehingga
bidang netralnya tidak bergeser.
Teknik ini memiliki kelemahan karena mahal harganya, juga masih
memerlukan kutub bantu (interpole) untuk mengatasi tegangan yang tidak
dapat diatasi oleh belitan kompensasi. Karenanya teknik ini tidak digunakan
untuk motor-motor yang bekerja ekstra berat, dimana pelemahan fluks akan
menjadi masalah yang serius [2].
2.5 Jenis-Jenis Motor Arus Searah
Jenis-jenis motor arus searah dapat dibedakan berdasarkan jenis
penguatannya,yaitu hubungan rangkaian kumparan medan dengan kumparan
24
2.5.1 Motor Arus Searah Penguatan Bebas
Motor arus searah penguatan bebas adalah motor arus searah yang sumber
tegangan penguatannya berasal dari luar motor Dimana kumparan medan
disuplai dari sumber tegangan DC tersendiri.Rangkaian ekivalen motor
arus searah penguatan bebas dapat dilihat pada Gambar 2.17 berikut ini[8]:
Gambar 2.17 Rangkaian ekivalen motor dc penguatan bebas
Persamaan umum motor arus searah penguatan bebas:
Vt = Ea + Ia.Ra . . . (2.5)
Vs = Is+ Rs . . . (2.6)
2.5.2 Motor Arus Searah Penguatan Sendiri
Motor arus searah penguatan sendiri dibagi atas tiga yaitu:
2.5.2.1 Motor Arus Searah Penguatan Shunt
25
Persamaan umum motor arus searah penguatan shunt:
Vt=Ea+Ia.Ra
Vsh=Vt=Ish.Rsh. . . .. . . (2.7)
IL = Ia+Ish. . . (2.8)
2.5.2.2 Motor Arus Searah Penguatan Seri
Gambar 2.19 Rangkaian ekivalen motor dc penguatan seri
Persamaan umum motor arus searah penguatan seri:
Vt=Ea+Ia(Ra+Rs). . . (2.9)
Ia= . . . (2.10)
Ia=IL=Is. . . . . . (2.11)
Dimana:
Ia=arus kumparan jangkar seri (Ampere)
Is= arus kumparan medan seri (Ampere)
Rs=tahanan medan seri(Ohm)
Ra=tahanan jangkar seri(Ohm)
Ea=gaya gerak listrik motor arus searah (Volt)
26
2.5.2.3 Motor Arus Searah Penguatan Kompon
Motor arus searah penguatan kompon terbagi atas dua,yaitu :
2.5.2.3.1 Motor Arus Searah Penguatan Kompon Pendek
Gambar 2.20 Rangkaian ekivalen motor dc penguatan kompon pendek
Persamaan umum motor arus searah penguatan kompon pendek
IL = Ia+Ish
Vt = Ea+Ia.Ra+IL.Rs. . . (2.12)
Pin = Vt.IL . . . (2.13)
2.5.2.3.2 Motor Arus Searah Penguatan Kompon Panjang
27
Persamaan umum motor arus searah penguatan kompon panjang
IL= Ia+Ish
Vt = Ea+Ia(Ra+Rs) . . . . . . .(2.14)
Pin = VtIL
Vt = Vsh
2.6 Karakteristik Motor DC Seri
Karakteristik Motor DC Seri terdiri dari [5] :
2.6.1 Karakteristik Torsi terhadap arus jangkar
Karakteristik Torsi terhadap arus jangkar mulanya membentuk garis parabola
saat nilai arus jangkar kecil dan ketika saturasi membentuk garis lurus seperti
gambar dibawah ini :
Gambar 2.22 Karakteristik Torsi terhadap arus jangkar motor dc
28
2.6.2 Karakteristik putaran terhadap arus jangkar
Ketika suplai tegangan V dijaga tetap konstan,kecepatan motor akan
berbanding terbalik dengan fluksi.dalam motor dc seri arus medan sama
besarnya dengan arus jangkar.Oleh karena itu saat beban ringan saturasi tak
tercapai,fluksi akan sebanding dengan arus jangkar dan putaran akan
berbanding terbalik dengan arus jangkar.Karena itu karakteristik putaran dan
arus jangkar membentuk kurva hiperbolic menuju saturasi.ketika beban naik
maka arus jangkar ikut naik dan medan memperoleh saturasi,saat medan
memperoleh saturasi maka fluksi menjadi konstan dan tak bergantung lagi
dengan kenaikan arus jangkar. Oleh karena itu saat beban berat,putaran motor
dc seri tetap konstan seperti gambar dibawah ini :
Arus Jangkar (Ia) Y
x
Gambar 2.23 Karakteristik putaran terhadap arus jangkar motor dc penguatan seri
2.6.3 Karakteristik putaran terhadap torsi
Karakteristik putaran terhadap torsi motor dc seri serupa dengan karakteristik
putaran terhadap arus jangkar yang berbentuk seperti hiperbola persegi panjang
29
Gambar 2.24 Karakteristik putaran terhadap torsi motor dc penguatan seri
2.7 Rugi-Rugi Motor Arus Searah
Motor DC menerima daya masukan berupa energi listrik dan
menghasilkan daya keluaran berupa energi mekanis.Akan tetapi tidak seluruh
daya masukan ke motor diubah menjadi daya keluaran yang berguna,selalu
ada energi yang hilang selama proses pengkonversian energi tersebut.Energi
yang hilang tersebut ada yang dikonversikan menjadi panas dan ada
yang diserap oleh mesin untuk mengatasi gesekan karena adanya bagian
yang berputar di dalam mesin.Rugi-rugi daya dalam bentuk panas ini jika
nilainya terlalu besar akan dapat menyebabkan kenaikan temperatur motor
yang dapat merusak isolasi dan mempercepat berkurangnya umur ekonomis
motor sehingga membatasi daya keluaran motor.Berikut proses
30
Gambar 2.25 Diagram aliran daya pada motor arus searah
Dengan demikian selalu ada selisih antara daya masukan dan daya keluaran
motor. Ini merupakan rugi-rugi daya yang terjadi di dalam motor. Dalam
persamaan dinyatakan dengan :
∑ Rugi-Rugi = Daya Masukan – Daya Keluaran [2]
Akhirnya,rugi-rugi di dalam motor DC didefenisikan sebagai selisih daya
antara daya masukan yang diterima motor dengan daya keluaran yang dapat
dihasilkannya dimana selisih daya tersebut berubah menjadi bentuk energi
yang lain yang tidak dapat digunakan bahkan dapat merugikan bagi motor
itu sendiri.
2.7.1 Rugi-Rugi Tembaga (Copper Loss)
Rugi-rugi tembaga adalah rugi-rugi daya yang terjadi di dalam
kumparan medan dan kumparan jangkar motor.Karena kawat tembaga
kedua kumparan tersebut memiliki nilai resistansi Rs dan Ra,maka jika
mengalir arus searah sebesar IS dan Iaakan menyebabkan kerugian daya
yang dihitung dengan persamaan [3] :
Wcu =(Ra+2Rs) I12 + I22 Ra ...(2.15)
31
I1 = arus motor
I2 = arus generator (beban)
Ra = resistansi jangkar
Rs = resistansi medan seri
2.7.2 Rugi-Rugi Inti (Core or Iron Losses)
Rugi-rugi ini terjadi di dalam jangkar motor DC yang disebabkan oleh perputaran jangkar di dalam medan magnet kutub-kutubnya.Ada dua jenis rugi- rugi inti yaitu:
1. Rugi Hysteresis
Rugi hysteresis terjadi di dalam jangkar mesin DC karena setiap bagian jangkar dipengaruhi oleh pembalikan medan magnetik sebagaimana bagian tersebut lewat di bawah kutub-kutub yang berurut.
Gambar 2.26 Perputaran jangkar di dalam motor dua kutub
Gambar 2.26 menunjukkan jangkar yang berputar di dalam motor dua kutub. Dengan menganggap ab sebagai potongan kecil dari jangkar.Ketika potongan ab berada di bawah kutub N,garis-garis magnetik lewat dari a ke b.Setengah perputaran selanjutnya,dari potongan besi yang sama berada di bawah kutub S dan garis-garis magnetik lewat dari b ke a sehingga sifat magnet di dalam besi dibalik.
Untuk dapat membalik molekul-molekul magnet secara terus menerus di dalam inti jangkar, sejumlah daya diserap sehingga menyebabkan pemanasan pada inti jangkar.Daya yang diserap dan berubah menjadi panas sebagai rugi-rugi di dalam inti jangkar dan disebut sebagai rugi hysteresis.Untuk menentukan besarnya rugi hysteresis di dalam inti jangkar digunakan persamaan Steinmentz yaitu[9] :
Ph = η B1.6 max f υ Watt...(2.16)
Dimana : Ph = rugi hysteresis
32
f = frekuensi pembalikan magnetik
= dimana n dalam rpm dan P=jumlah kutub
υ = volume jangkar (m3)
η = koefisien hysteresis Steinmentz 2. Rugi Arus Pusar
Sebagai tambahan terhadap tegangan yang diinduksikan di dalam konduktor jangkar,ada juga tegangan yang diinduksikan di dalam inti jangkar.Tegangan ini menghasilkan arus yang bersikulasi di dalam inti jangkar seperti yang ditunjukkan dalam Gambar 2.27.Ini disebut sebagai arus pusar (eddy current) dan daya yang hilang karena alirannya disebut dengan rugi arus pusar.
Rugi arus pusar berlaku sebagai panas yang dapat menaikkan temperatur motor dan menurunkan efisiensinya. Jika suatu inti besi padat digunakan sebagai inti jangkar,resistansi terhadap arus pusar ini akan menjadi kecil karena lebarnya luas penampang inti.Akibatnya,nilai arus pusar dan juga rugi arus pusarnya akan menjadi besar.Besarnya nilai arus pusar dapat dikurangi dengan membuat resistansi inti sebesar mungkin secara praktisnya[10].
(a) (b)
Gambar 2.27 (a) Arus pusar didalam jangkar yang padat (b) Arus pusar di dalam inti jangkar yang dilaminasi
2.7.3 Rugi-Rugi Mekanis (Mechanical Losses)
Rugi-rugi mekanis di dalam mekanis motor DC merupakan
rugi-rugi yang berhubungan dengan efek-efek mekanis di dalam motor DC
yaitu gesekan dan angin.Rugi-rugi gesekan adalah rugi-rugi yang
33
berputar dengan bagian-bagian yang diam dari motor, diantaranya gesekan
bearing atau bantalan peluru dengan rumah bearing atau dengan as rotor.
Juga gesekan antara permukaan sikat dengan komutator.Karena adanya
suatu nilai koefisien gesek antara permukaan bagian-bagian tersebut
walaupun kecil,diperlukan gaya untuk mengimbangi gaya lawan akibat
koefisien gesek tersebut jika ingin menggerakkan rotor motor DC tersebut.
Sedangkan rugi-rugi angin adalah rugi-rugi yang disebabkan oleh
pergesekan antara bagian-bagian motor yang berputar dengan udara di
dalam rumah (casing) motor.Baik itu pergesekan antara permukaan rotor
dengan udara pada celah udara di dalam motor ataupun gesekan udara
dengan kipas pendingin yang dipasangkan pada rotor di dalam motor.
Rugi-rugi angin ini bervariasi tergantung pada kecepatan rotasi motor
tersebut[8].
2.7.4 Rugi-Rugi Beban Stray (Stray Load Losses)
Rugi-rugi beban stray merupakan rugi-rugi yang disebabkan
oleh arus pusar di dalam tembaga dan rugi-rugi inti tambahan di dalam
besi,yang timbul karena pendistorsian fluks magnetik oleh arus beban (tidak
termasuk yang disebabkan oleh jatuh tegangan IR) dan rugi-rugi hubung
singkat komutasi.
Rugi-rugi beban stray ini tidak dapat dikategorikan ke dalam tipe
rugi-rugi yang disebutkan di atas.Di dalam perhitungan rugi-rugi motor DC,
besarnya rugi- rugi beban stray dinyatakan sebesar ± 1% dari beban penuh.
Rugi-rugi di dalam motor DC seri di atas juga dapat dikelompokkan
34
1. Rugi-rugi konstan yaitu rugi-rugi di dalam motor DC yang nilainya
selalu tetap, tidak tergantung pada arus pembebanan. Rugi-rugi inti
+ mekanis disebut dengan rugi-rugi rotasi. Yang termasuk ke dalam
kelompok rugi-rugi konstan adalah :
a. Rugi-rugi inti yaitu rugi-rugi hysteresis dan arus pusar
b. Rugi-rugi mekanis yaitu rugi-rugi gesek dan angin.
2. Rugi-rugi variabel yaitu rugi-rugi di dalam motor DC yang
nilainya bervarisasi terhadap arus pembebanan. Yang termasuk ke
dalam kelompok rugi-rugi ini adalah:
a. Rugi-rugi tembaga kumparan jangkar (Ia2Ra).
b. Rugi-rugi tembaga kumparan medan seri (Ia2Rs)
c. Rugi jatuh tegangan sikat (VbdIa)
Sehingga rugi-rugi total di dalam Motor DC adalah :
∑ Rugi-Rugi = Rugi Konstan + Rugi Variabel [3]
2.8 Torsi Motor Arus Searah
Yang dimaksud torsi adalah putaran dari suatu gaya terhadap suatu
poros.Ini diukur dengan hasil gaya itu dengan jari-jari lingkaran dimana gaya
tersebut bekerja.
Gambar 2.28 menunjukkan pada suatu pulley dengan jari-jari r bekerja suatu
gaya F Newton yang menyebabkan benda berputar dengan kecepatan n
putaran per detik [4]
Torsi = F x r Newton-meter (N-m) ...(2.17)
35
= F x 2 π r Joule ...(2.18)
Gambar 2.28 Suatu pulley yang berputar karena mengalami suatu gaya
Daya yang dibangkitkan:
= F x 2 π r x n Joule/detik
= (F x r) x 2 π n Joule/detik ...(2.19)
Jika :
2 π n = kecepatan sudut (ω) dalam rad/detik
F x r = torsi T
Maka daya yang dibangkitkan = T x ω Joule/detik
= T x ω Watt
2.8.1 Torsi Jangkar
Di dalam motor DC,setiap konduktor di bagian permukaan jangkar akan
mengalami gaya F pada suatu jarak r yang merupakan jari-jari jangkar.Dengan
demikian,masing-masing konduktor menghasilkan suatu torsi yang cenderung
untuk memutar jangkar.Jumlah seluruh torsi yang dihasilkan oleh konduktor
jangkar dikenal dengan torsi jangkar (Ta) [4]
Jika pada suatu motor DC :
r = rata-rata jari-jari jangkar (meter)
36
Z = jumlah total konduktor jangkar
I = arus dalam setiap konduktor = Ia/A (Ampere)
B = rapat fluks rata-rata (Weber/meter2)
Φ = fluks per kutub (Weber)
P = jumlah kutub
Maka gaya pada setiap konduktor, F = B i l Newton
Torsi yang dihasilkan oleh suatu konduktor = F x r Newton-meter
Torsi jangkar total, Ta = Z F r Newton-meter
Ta = Z B i l r Newton-meter
Sekarang i = Ia/A, B = Φ/a dimana a adalah luas penampang jalur fluks per kutub
pada jari-jari r. Jelasnya, a = 2 π r
Ta = 0,159 x x Ia atau Ta = 9,55 x . N-m ...(2.20)
2.8.2 Torsi Poros
Torsi yang dapat dimanfaatkan pada poros untuk melakukan usaha yang
berguna dikenal dengan torsi poros. Ini dilambangkan dengan Tsh.Torsi poros
merupakan torsi yang akan menghasilkan daya keluaran motor yang berguna. Jika
kecepatan motor adalah n rpm, maka Daya keluaran (Watt) = 2 π n Tsh /60
Atau Tsh = 9,55 x N-m... (2.21)
2.9 Efisiensi Pada Mesin Arus Searah
Seperti halnya dengan mesin listrik lainnya, pada mesin listrik arus
searah, efisiensinya dinyatakan sebagai berikut:
η = 100% ... (2.22)
37
Pout=daya keluaran [5]
2.10 Metode Field’s Test
Metode ini dapat diterapkan untuk dua motor seri yang identik.
Seperti pada pengujian hopkinson,kedua motor seri dikopel secara
mekanis,dimana mesin yang satu bekerja sebagai motor dan yang lainnya
sebagai generator,namun pada pengujian ini keluaran generator dibuang
melalui resistansi R [3].
Berikut ini adalah rangkaian field’s test untuk motor seri :
Dimana :V = Tegangan suplai ke motor (volt)
V1 = Tegangan terminal jangkar motor arus searah (volt)
I1 = Arus motor (ampere)
V2 = Tegangan terminal jangkar generator arus searah (volt)
I2 = Arus beban (ampere)
Rs = tahanan medan seri
Ra = tahanan jangkar seri
38
Gambar 2.29 Rangkaian field’s test untuk motor arus searah
berpenguatan seri
Rugi besi dan gesekan kedua mesin dibuat sama dengan [2] :
1.Menggabung kumparan medan seri generator pada rangkaian jangkar
motor,sehingga kedua mesin akan mendapat penguatan yang sama
2.Memutar kedua mesin dengan kecepatan yang sama.
Motor arus searah tersebut diberi pasokan catu daya arus searah dengan tegangan
nominalnya.Variabel resistor R disetel sedemikian rupa hingga motor mencapai
keadaan beban penuh (diindikasikan oleh Amperemeter A),kemudian catat semua
penunjukan instrumen ukur[3].
Daya masukan sistem (total) = Vt. I1
Daya keluaran sistem =V2. I2
Rugi total sistem = Wt = Vt. I1 - V2. I2
Rugi tembaga jangkar dan medan sistem = Wcu = ( Ra + 2Rs ).I12 + I22 Ra
Rugi beban stray sistem = Wt – Wcu
Rugi beban stray per mesin=WS = (Wt – Wcu) / 2
39
Daya masukan motor =V1. I1
Rugi-rugi motor=Wm = ( RA + RS ).I12 + WS
η (%) = {V1. I1 - Wm}/ V1. I1
Efisiensi generator [3] :
Efisiensi generator untuk pengujian ini jarang dicari, karena generator beroperasi
dalam keadaan abnormal (penguatan terpisah), namun jika diinginkan dapat dicari
sebagai berikut :
Daya Keluaran Generator = V2.I2
Rugi-rugi Generator =Wg= Rs .I12 + Ra.I22 + WS
η (%) = {V2.I2}/ (V2.I2 + Wg)
2.11 Prinsip Penyearahan Tegangan Listrik Mesin DC (Komutasi)
Komutator terbuat dari batangan tembaga yang dikeraskan (dropforged),yang diisolasi dengan bahan sejenis mika. Komutator merupakan alat penyearah arus secara mekanik yang bekerja bersama sama dengan sikat.Adapun fungsi komutator ini adalah untuk mengumpulkan arus listrik induksi dari konduktor jangkar dan mengkonversikannya menjadi arus searah melalui sikat.
Sedangkan sikat terbuat dari karbon,grafit,logam grafit atau campuran karbon-grafit yang dilengkapi dengan pegas penekan dan kontak sikatnya.besarnya tekanan pegas dapat diatur sesuai dengan keinginan.Permukaan sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik Sikat sikat berfungsi sebagai jembatan bagi aliran arus yang dihasilkan oleh lilitan jangkar ke bagian beban.sikat juga berfungsi sebagai tempat terjadinya komutasi Kerja komutator dan sikat untuk penyearahan arus yang dihasilkan oleh kumparan disebut komutasi
40
dihasilkan oleh mesin arus searah pada prinsipnya sama seperti pada mesin arus bolak-balik yaitu tegangan yang dihasilkan berupa tegangan listrik bolak-balik.
Gambar 2.30 Mesin arus searah sederhana dengan satu belitan rotor tunggal Perhatikan gambar 2.30 Untuk terjadinya induksi tegangan, penghantar rotor yang bergerak harus memotong medan magnet.Dengan demikian, maka tegangan hanya akan terinduksi pada segmen ab dan cd dari belitan rotor pada gambar 2.30 Tegangan induksi yang terjadi dinyatakan sebagai :
eind = (v x B).l
di mana v = kecepatan gerak penghantar rotor B = kerapatan fluks magnetik l = panjang penghantar
Arah (v x B) merupakan arah arus di dalam penghantar bila terhubung dengan beban, seperti pada gambar 1. Besar tegangan induksi yang terbentuk pada penghantar tunggal adalah sbb :
eloop = eab + ebc + ecd + eda
eloop = Blv + 0 + Blv + 0
eloop = 2 Blv
41
gambar berikut ini. Dapat dilihat bahwa tegangan yang terbentuk adalah tegangan bolak-balik (AC). Untuk itu diperlukan proses penyearahan didalam mesin arus searah.
Gambar 2.31 Bentuk gelombang tegangan induksi pada belitan rotor
Prinsip penyearahan pada mesin arus searah dilakukan oleh komutator dan sikat secara mekanis, dan prosesnya dapat dilihat pada penjelesan berikut :
42 Pada waktu t1 :
Segmen komutator tepat berhimpit pada sikat, pada saat ini arus listrik dari dua jalur pararel seluruhnya sebesar ½IA + ½ IA = IA’ mengalir melalui segmen
komutator sebelah kanan ke sikat. Arus yang mengalir pada kumparan k adalah sebesar ½ IA kearah kanan.
Pada waktu t2:
Segmen komutator berhimpit pada sikat dengan perbandingan 1 : 3 antara segmen komutator sebelah kiri dan kanan, sehingga arus listrik yang mengalir pada dua jalur pararel tersebut (kiri dan kanan) juga proporsional dengan perbandingan bagian komutator yang berhimpit dengan sikat, distribusi arusnya : segmen komuntator sebelah kiri sebesar ¼ IA dengan segmen komutator sebelah kanan
sebesar 3/4 IA. Arus yang mengalir pada kumparan k adalah sebesar ¼ IA kearah
kanan.
Pada waktu T3 :
Sikat tepat bearada ditengah-tengah segmen komutator, sehingga arus yang mengalir terdistribusi menjadi dua bagian yang sama besar antara segmen komutator sebelah kiri dan kanan, sehingga pada kumparan k tidak ada arus yang mengalir (nol).
Pada waktu T4 :
Segmen komutator berhimpit pada sikat dengan perbandingan 3 : 1 antar segmen komutator sebelah kiri dan kanan, sehingga arus listrik yang mengalir pada dua jalur pararel tersbut (kiri dan kanan) juga proporsional dengan perbandigan bagain komutator yang berhimpit dengan sikat, distribusi arusnya : segmen komuntator sebelah kiri sebesar ¾ IA dan segmen komuntator sebelah kanan sebesar ¼ IA.
Arus yang mengalir pada kumparan k adalah sebesar ¼ IA ke arah kiri.
Pada waktu T5 :
43
listrik dari dua jalur pararel seluruhnya sebesar ½ A1 + ½ IA = IA’ mengalir melalui segmen mengalir melalui segmen komutator sebelah kiri ke sikat. Arus yang mengalir pada kumparan k adalah sebesar ½ IA ke arah kiri.
Perpindahan arus yang terjadi pada kumparan k (kumparan jangkar) yang berputar pada medan magnet menyebabkan gaya gerak listrik (tegangan induksi) membentuk gelombang searah (terjadi pembalikan), seperti pada gambar berikut :
Gambar 2.33 Tegangan mesin arus searah hasil komutasi
Sedangkan gambar arus sebagai fungsi waktunya dilukiskan pada gambar berikut:
Gambar 2.34 Arus searah mesin arus searah
Prinsipnya penyearahan ideal terlihat sebagai garis linear. Sedangkan hasil penyearahan pada parakteknya berbentuk seperti gambar setengah lingkaran yang bergaris putus-putus, hal ini akibat pengaruh induktansi kumparan dan tahanan sikat. Solusi untuk menjadikannya ideal (berupa garis liner), dapat ditempuh dengan menetralkan ggm yang timbul akibat induktansi tersebut, salah satunya dengan menambahkan kutub bantu komutasi,kumparan kompensasi. dimana ggm nya sama dan berlawanan dengan ggm induktansi.
t
1
BAB 1
PENDAHULUAN
1.1 Latar Belakang
Motor arus searah adalah sebuah mesin arus searah yang mengubah
energi listrik menjadi energi mekanik.Motor arus searah sangat banyak
digunakan dalam bidang industri.Penggunaan motor arus searah dapat
dijumpai misalnya sebagai motor penggerak beban mekanik seperti
pompa,penggerak kipas angin,blower,lift,eskalator,penggerak pulley
konveyor,dan lain-lain.Motor arus searah yang digunakan dibidang
industri pada umumnya memiliki kapasitas daya yang relatif besar dan
disesuaikan dengan beban mekanis serta jumlah produksi yang diinginkan.
Untuk memenuhi semuanya itu,maka diperlukan motor arus searah
yang memiliki efisiensi dan torsi tinggi. Pada motor arus searah suplai
daya yang diperoleh berasal dari sumber tegangan listrik arus searah.
Dimana sumber tegangan searah ini diberikan kepada kumparan jangkar
dan kumparan medan dari motor tersebut.
Disaat motor diberi beban,maka fluksi akan berkurang dan
amper-turn medan akan berkurang juga. Hal ini disebabkan oleh karena adanya
reaksi jangkar.Reaksi jangkar sangat berpengaruh terhadap
kinerja,efisiensi,dan torsi dari motor tersebut.Untuk mengurangi reaksi
jangkar ini,ada tiga cara atau teknik yang dapat dilakukan yaitu melakukan
penggeseran sikat(brush shifting),kutub-kutub komutasi (comutating
2
Pada tugas akhir ini,penulis akan membahas tentang Analisis
perbandingan efisiensi dan torsi motor dc seri akibat pergeseran sikat
dengan menggunakan metode field’s test.
1.2 Perumusan Masalah
Adapun rumusan masalah dari tugas akhir ini adalah :
1. Bagaimana pengaruh pergeseran sikat terhadap efisiensi motor arus
searah penguatan seri dengan menggunakan metode field’s test
2. Bagaimana pengaruh pergeseran sikat terhadap torsi motor arus
searah penguatan seri dengan menggunakan metode field’s test
3. Bagaimana pengaruh kutub kutub komutasi terhadap efisiensi
motor arus searah penguatan seri dengan menggunakan metode
field’s test
4. Bagaimana pengaruh kutub kutub komutasi terhadap torsi motor
arus searah penguatan seri dengan menggunakan metode field’s
test
1.3 Tujuan
Adapun tujuan dari penulisan tugas akhir ini adalah untuk :
1. Mengetahui pengaruh pergeseran sikat terhadap efisiensi dan torsi
motor arus searah penguatan seri dengan menggunakan metode
field’s test.
2. Mengetahui pengaruh kutub kutub komutasi terhadap efiesiensi
dan torsi motor arus searah penguatan seri dengan menggunakan
3
3. Memperlihatkan perbandingan efisiensi dan torsi antara pergeseran
sikat dengan kutub kutub komutasi dan pergeseran sikat tanpa
kutub kutub komutasi motor arus searah penguatan seri dengan
menggunakan metode field’s test.
1.4 Batasan Masalah
Adapun pembatasan masalah yang dilakukan dalam penulisan tugas akhir
ini adalah:
1. Motor yang dipergunakan sebagai aplikasi adalah motor arus searah
penguatan seri pada Laboratorium Konversi Energi Listrik Departemen
Teknik Elektro,Fakultas Teknik,Universitas Sumatera Utara.
2. Rugi-rugi yang di hitung adalah rugi-rugi tembaga dan rugi-rugi beban
stray pada motor dc penguatan seri
3. Motor arus searah penguatan seri dalam keadaan berbeban.
4. Tidak membahas tentang gangguan-gangguan yang terjadi pada motor
arus searah penguatan seri.
5. Analisis data dan perhitungan berdasarkan peralatan yang tersedia di
4
1.5 Manfaat
Dari penulisan tugas akhir ini diharapkan dapat dimanfaatkan sebagai
bahan pembelajaran guna memberikan pemahaman yang lebih jelas mengenai
permasalahan komutasi(penyearahan) pada motor arus searah penguatan seri dan
bagaimana pengaruhnya terhadap efisiensi dan torsi motor arus searah penguatan
seri bila dilakukan pergeseran sikat ataupun ditambahkan kutub kutub komutasi
Adapun hasil dari tugas akhir ini,kita bisa melihat nilai perbandingan
efisiensi dan torsi motor dc seri antara pergeseran sikat dengan kutub kutub
komutasi dan tanpa adanya kutub kutub komutasi,dan kita dapat menyimpulkan
cara yang terbaik untuk mengatasi permasalahan yang timbul akibat proses
i ABSTRAK
Motor arus searah adalah sebuah mesin arus searah yang mengubah energi
listrik menjadi energi mekanik.Pada penggunaannya motor arus searah harus
disesuaikan dengan kebutuhan agar ekonomis dan efisien.Untuk memenuhi
semuanya ini,maka diperlukan motor arus searah yang memiliki efisiensi dan torsi
tinggi.Pergeseran sikat dan penambahan kutub kutub komutasi berpengaruh
terhadap kinerja dari motor DC.Dengan menggeser posisi sikat dan menambahkan
kutub kutub komutasi,maka akan diperoleh efisiensi dan torsi yang lebih baik
sehingga motor DC dapat bekerja dengan lebih baik.Pada tugas akhir ini akan
dibahas analisis perbandingan efisiensi dan torsi motor dc seri akibat pergeseran
sikat dengan menggunakan metode field’s test.Berdasarkan hasil pengujian dan
perhitungan,efisiensi yang tertinggi diperoleh pada posisi sikat -300 yaitu pada
motor DC seri tanpa kutub kutub komutasi sebesar 62,13% sedangkan pada motor
DC seri dengan kutub kutub komutasi sebesar 64,51%.Torsi yang tertinggi
diperoleh pada posisi +300 yaitu pada motor DC seri tanpa kutub kutub komutasi
sebesar 2,54 N-m sedangkan pada motor DC seri dengan kutub kutub komutasi
sebesar 2,81 N-m.
Kata kunci : motor dc seri, pergeseran sikat, kutub kutub komutasi, metode field’s
TUGAS AKHIR
ASALISIS PERBASDISGAS EFISIESSI DAS TORSI MOTOR DC SERI AKIBAT
PERGESERAS SIKAT DESGAS MESGGUSAKAS METODE FIELD’S TEST
Diajukan untuk memenuhi persyaratan
menyelesaikan pendidikan sarjana (S-1) pada
Departemen Teknik Elektro Sub konsentrasi Teknik Energi Listrik
Oleh
Riandi Fuanto
SIM : 110402102
DEPARTEMES TEKSIK ELEKTRO
FAKULTAS TEKSIK
USIVERSITAS SUMATERA UTARA
MEDAS
i ABSTRAK
Motor arus searah adalah sebuah mesin arus searah yang mengubah energi
listrik menjadi energi mekanik.Pada penggunaannya motor arus searah harus
disesuaikan dengan kebutuhan agar ekonomis dan efisien.Untuk memenuhi
semuanya ini,maka diperlukan motor arus searah yang memiliki efisiensi dan torsi
tinggi.Pergeseran sikat dan penambahan kutub kutub komutasi berpengaruh
terhadap kinerja dari motor DC.Dengan menggeser posisi sikat dan menambahkan
kutub kutub komutasi,maka akan diperoleh efisiensi dan torsi yang lebih baik
sehingga motor DC dapat bekerja dengan lebih baik.Pada tugas akhir ini akan
dibahas analisis perbandingan efisiensi dan torsi motor dc seri akibat pergeseran
sikat dengan menggunakan metode field’s test.Berdasarkan hasil pengujian dan
perhitungan,efisiensi yang tertinggi diperoleh pada posisi sikat -300 yaitu pada
motor DC seri tanpa kutub kutub komutasi sebesar 62,13% sedangkan pada motor
DC seri dengan kutub kutub komutasi sebesar 64,51%.Torsi yang tertinggi
diperoleh pada posisi +300 yaitu pada motor DC seri tanpa kutub kutub komutasi
sebesar 2,54 N-m sedangkan pada motor DC seri dengan kutub kutub komutasi
sebesar 2,81 N-m.
Kata kunci : motor dc seri, pergeseran sikat, kutub kutub komutasi, metode field’s
ii KATA PESGASTAR
Segala puji dan syukur penulis panjatkan kehadirat Tuhan Yesus
Kristus,karena atas berkat dan rahmat-Nya Tugas Akhir ini dapat disusun dan
diselesaikan dengan baik.
Tugas Akhir ini merupakan bagian dari kurikulum yang harus diselesaikan
untuk memenuhi persyaratan dalam menyelesaikan pendidikan Sarjana Strata Satu
di Departemen Teknik Elektro,Fakultas Teknik,Universitas Sumatera Utara.
Adapun judul Tugas akhir ini adalah:
“ASALISIS PERBASDISGAS EFISIESSI DAS TORSI MOTOR DC SERI
AKIBAT PERGESERAS SIKAT DESGAS MESGGUSAKAS METODE
FIELD’S TEST”
Tugas Akhir ini penulis persembahkan kepada yang teristimewa yaitu
ayahanda (Simon Sembiring) beserta Ibunda (Enny Tarigan) dan Abang – adik
tersayang (Rejan Refanly Sembiring dan Lasya Yolanda Sembiring) yang selalu
memberikan semangat dan mendoakan penulis selama studi hingga
menyelesaikan Tugas Akhir ini.
Selama masa kuliah hingga penyelesaian Tugas Akhir ini penulis juga
banyak mendapatkan dukungan maupun bantuan dari berbagai pihak. Untuk itu
penulis ingin menyampaikan rasa terima kasih yang mendalam kepada :
1. Bapak Ir.Raja Harahap,M.T. selaku dosen pembimbing Tugas
Akhir yang telah banyak meluangkan waktu dan pikirannya untuk
selalu memberikan bantuan,bimbingan dan pengarahan kepada
iii
2. Bapak Ir. Eddy Warman,M.T. selaku dosen Penguji Tugas Akhir
yang telah banyak memberikan masukan demi perbaikan Tugas
Akhir ini dan telah memberikan pengarahan kepada penulis selama
perkuliahan hingga penyusunan Tugas Akhir ini.
3. Bapak Ir.Syamsul Amien,M.S. selaku dosen penguji Tugas Akhir
yang telah banyak memberikan masukan demi perbaikan Tugas
Akhir ini.
4. Bapak Ir. Surya Tarmizi Kasim, M.si. selaku Ketua Departemen
Teknik Elektro,Fakultas Teknik,Universitas Sumatera Utara yang
telah banyak memberikan bimbingan,nasehat dan motivasi kepada
penulis selama menjalani perkuliahan.
5. Ibu Naemah Mubarakah,S.T.,M.T. selaku dosen Wali yang selalu
memberikan arahan,bimbingan dan nasihat selama penulis
menjalani perkuliahan di Departemen Teknik Elektro,Fakultas
Teknik,Universitas Sumatera Utara.
6. Seluruh Bapak dan Ibu dosen yang telah mendidik serta
memberikan pengalaman hidup yang berharga selama masa
perkuliahan kepada penulis.
7. Bang Marthin,Kak Ester,Kak Umi,Pak Ponijan dan Bang Dipo,
selaku staf pegawai Departemen Teknik Elektro,Fakultas Teknik,
Universitas Sumatera Utara yang telah membantu penulis dalam
pengurusan administrasi.
8. Sahabat Kerja Praktek Dedywidya Sitindaon,Sandro Levi
iv
Hutauruk yang telah memberikan motivasi dan semangat selama
perkuliahan,kerja praktek hingga menyelesaikan Tugas Akhir ini.
9. Seluruh pengurus Ikatan Mahasiswa Teknik Elektro periode
2014/2015 stambuk 2011 Riko Jogi Petrus Pasaribu,Wahyudi
Syahputra,Hajijah afni,Seprianti,James Napitupulu (Jimbo),Emir
Lutfi Pahlevi,Rizky Wira Handalan,Risjen sianturi,Ferro
Hudson,Samgar Siahaan,Tidauccy Samuel,Faisal Hasibuan,Bill
Immanuel Tarigan,Yosef Tarigan,Fernando EP,Yoshua Bangun,
Canboy dan Biondi Laurens.
10. Rekan - rekan Asisten Laboratorium Dasar Konversi Aspar
nasution serta Muhammad zein yang telah membantu penulis
dalam mengambil data yang berkaitan dengan Tugas akhir penulis,
Asisten Teknik Tegangan Tinggi Josiah Suatan,Memory Hidyart,
Asisten Laboratorium Transmisi dan Distribusi Andreas VHS,Ann
Alberth Sitorus(ciputo),M.Fikri,Sakinah,Syahlan Hutagaol dan
frederik Serta tidak ketinggalan Asisten Laboratorium Komputer
Frans M silaban dan Mian sianturi.
11. Anak Kos Terompet 28 Tony Putra L.Tobing yang telah
memberikan nasehat nya yang bijak kepada penulis dikala malam
hari,Ari frahma ginting,freddy sinaga(Denago),Nuel dan Goster.
12. Agustina Angelina Sinaga Uruk,seorang teman,sahabat dan
penyemangat yang istimewa. Terima kasih atas semua bantuan,
Motivasi,Doa dan dukungannya selama ini kepada penulis dalam
v
13.Teman SMA ku Deny Frans Sihotang,Frandy Manurung,Dandy
Sitompul,Bayu aditya sinuraya,Minta tio Hari yang telah
memberikan nasehat dan dukungan kepada penulis.
14.Teman Sastra China, Widy Tobing (dek wede),Mey
Elizabeth,Nerly Catherine, kedua itokku Febrina Tampubolon dan
Sanny Tung.
15.Seluruh teman-teman stambuk 2011 yang tidak bisa saya sebutkan
satu persatu yang sudah memberikan pelajaran hidup,cerita,canda
dan ilmu selama penulis menjalani perkuliahan di Departemen
Teknik Elektro,Fakultas Teknik, Universitas Sumatera Utara.
Penulis menyadari bahwa Tugas Akhir ini jauh dari sempurna oleh karena itu
penulis mengharapkan adanya kritik dan saran dari pembaca yang dapat membuat
Tugas Akhir ini lebih baik lagi.Semoga Tugas Akhir ini dapat berguna dan
bermanfaat bagi pembaca.
Medan, Januari 2016
Riandi Fuanto
NIM: 110402102
vi DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... vi
DAFTAR GAMBAR ... x
DAFTAR TABEL ... xii
BAB 1 PENDAHULUAN ... 1
1.1Latar Belakang ... 1
1.2Perumusan Masalah ... 2
1.3Tujuan ... 2
1.4Batasan Masalah ... 3
1.5Manfaat ... 4
BAB 2 TINJAUAN PUSTAKA ... 5
2.1Motor Arus Searah ... 5
2.2Konstruksi Motor Arus Searah ... 6
2.3Prinsip Kerja Motor Arus Searah ... 12
2.4Permasalahan dengan Komutasi Pada Mesin Arus Searah ... 16
2.4.1 Reaksi Jangkar ... 16
2.4.2 Tegangan L.di/dt ... 19
2.4.3 Mengatasi Masalah Komutasi ... 20
![Gambar 2.8 berikut ini[6].](https://thumb-ap.123doks.com/thumbv2/123dok/903835.598063/24.595.162.478.581.726/gambar-berikut-ini.webp)