OPTIMASI PARAMETER PEMESINAN PADA MESIN
SEKRAP MODEL L-450 MENGGUNAKAN
ALGORITMA GENETIKA
SKRIPSI
Skripsi Yang Diajukan Untuk Melengkapi Syarat Memperoleh Gelar Sarjana Teknik
RAMADHAN
NIM. 080401058
DEPARTEMEN TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
KATA PENGANTAR
Puji syukur penulis panjatkan kehadiran Tuhan Yang Maha Esa karena atas
rahmat dan karunia-Nya lah penulis akhirnya dapat menyelesaikan skripsi ini
dengan judul “OPTIMASI PARAMETER PEMESINAN PADA MESIN SEKRAP
MENGGUNAKAN ALGORITMA GENETIKA ”.
Skripsi ini disusun untuk memenuhi syarat menyelesaikan pendidikan
Strata-1 (S1) pada Departemen Teknik Mesin Sub Bidang Konversi Energi,
Fakultas Teknik, Universitas Sumatera Utara.
Dalam menyelesaikan skripsi ini tidak sedikit kesulitan yang dihadapi
penulis, namun berkat dorongan, semangat, doa dan bantuan baik materiil, moril,
maupun spirit dari berbagai pihak akhirnya kesulitan itu dapat teratasi. Untuk itu
sebagai manusia yang harus tahu berterima kasih, degan penuh ketulusan hati
penulis mengucapkan terima kasih kepada :
1. Bapak Ir. Alfian Hamsi, M.Sc selaku dosen pembimbing, yang dengan penuh
kesabaran telah memberikan bimbingan dan motivasi kepada penulis.
2. Bapak Dr. Eng. Himsar Ambarita, ST., MT. dan Bapak Tulus Burhanuddin
Sitorus ST., MT selaku dosen pembanding I dan II yang telah memberikan
masukan dan saran dalam menyelesaikan skripsi ini.
3. Bapak Dr. Ing. Ir Ikhwansyah Isranuri selaku Ketua Departemen Teknik Mesin
Universitas Sumatera Utara.
4. Bapak Ir. M. Syahril Gultom MT. Selaku Sekretaris Departemen Teknik Mesin
Universitas Sumatera Utara.
5. Kedua orang tua penulis, Idham dan Lamiyem yang tidak pernah
purus-putusnya memberikan dukungan, doa serta kasih sayangnya yang tak terhingga
kepada penulis.
6. Seluruh staf pengajar dan staf tata usaha Departemen Teknik Mesin yang telah
membimbing serta membantu segala keperluan penulis selama penulis kuliah.
7. Bapak Ir. Tugiman MT. selaku dosen wali.
8. Seluruh saudara penulis, Marwan, Lia, Irfan Sugiarto, M. Adil Khairi yang
9. Rekan-rekan satu tim kerja, Ficky Hamdhani, Gio Saputra, Rudi Martin dan
Roby Mulyadi yang telah meluangkan waktunya untuk memberikan saran dan
kritik.
10. Rekan-rekan di Laboratorium Menggambar Mesin / CAD yaitu Putra Setiawan,
Munawir Rosyadi Siregar, Syahrul Ramadhan, Zuhdi Mahendra, Tri Septian
Marsah, Juliono, Zulvia Chara Nosa Ginting.
11. Seluruh rekan mahasiswa angkatan 2008 khususnya Zulfadhli, Putra Setiawan,
Rahman dan Indra Rukamana yang telah bersama-sama melewati masa kerja
praktek di PT. Perkebunan Nusantara III – PKS Rambutan.
12. Teman-teman dari HORAS TEAM seperti Munawir R. Siregar, Rio Arinedo
Sembiring, Sepvinolist T. Pardede, Fernando B. Siagian, Irham Fadillah,
Ekawira Napitupulu, Hotlan Nababan, Ary Fadila, Sony A. Sembiring,
Robertus Simanungkalit, Zulfadhli, Putra Setiawan, dan Nehemia Sembiring,
13. Teman-Teman geng kerupuk apem yaitu, Ikram, Syahrul Ramadhan, Fahrul
Rozzy, Felix Asade, Maraghi Muttaqin, Gio sahputra dan Harry Pramana.
14. Teman-Teman lain yaitu, Daniansyah, Ismail Husin Tanjung, Aldiansyah Leo,
Maujan yudika, Royyan Nst, Sahir B. Rangkuti, Parulian Siahaan, Ferdinan
Lubis, Joshua Surbakti, Daniel Ortega panjaitan, Indra Gunawan Purba,
Fransiscus Sitompul, rekan-rekan mahasiswa 2008 yang tidak mungkin
disebutkan satu-persatu, para abang senior dan adik-adik junior semua yang
telah mendukung dan memberi semangat kepada penulis.
Penulis menyadari bahwa masih banyak kesalahan dan kekeliruan dalam
penulisan skripsi ini. Oleh karena itu penulis akan sangat berterima kasih dan
dengan senang hati menerima saran dan kritik yang membangun demi tercapainya
tulisan yang lebih baik. Akhir kata penulis berharap semoga tulisan ini dapat
memberi manfaat kepada pembaca. Terima kasih.
Medan, Mei 2013
ABSTRAK
Algoritma genetika merupakan suatu metode pencarian yang sangat efektif untuk menyelesaikan permasalahan optimasi pada dunia industri atau manufaktur yang memiliki permasalahan–permasalahan kompleks secara lebih mudah dan lebih akurat. Metode pencarian ini didasarkan oleh mekanisme evolusi. Evolusi akan mengakibatkan perubahan yang terus–menerus untuk menuju suatu kesempurnaan atau keseimbangan. Fungsi optimasi pada pengujian ini dibuat dari persamaan waktu permesinan dimana parameter yang digunakan adalah kecepatan potong dengan ambang batas antara 24 m/min sampai dengan 30 m/menit dan gerak makan berkisar antara 0,1 mm sampai dengan 0,5 mm. Proses optimasi dimulai dari membangkitkan populasi awal secara acak kemudian dilakukan seleksi dengan metode roda roulette lalu proses genetika yaitu rekombinasi (crossover) dan mutasi, selanjutnya dievaluasi nilai fitness dari individu baru. Parameter terbaik ditentukan oleh nilai fitness terkecil karena fungsi optimasinya diturunkan dari waktu permesinan sehingga akan diperoleh nilai yang paling optimal dengan kecepatan potong 29,1026 m/menit, gerak makan 0,4556 mm dan waktu pemotongan 0,1885 min.
ABSTRACT
Genetic algorithm is a method of search that very efective to solve the problems of optimation in the world of industries or manufactures are possess any complex of problems be more easily and accurate. This method of search based on the mechanism of evolution. Evolution will effected the change continiously to aim a perfect or balance. The function of optimation at these trials are made from equality of time of machinery where the parameters be used are velocity of slice with range between 24 m/min up to 30 m/menit and eat moving with range between 0,1 mm up to 0,5 mm. The Process of optimation began from awaken of first population randomly then do selection with method of wheel of roulette then the process of genetic that is recombination (crossover) and mutation, furthermore evaluated the value of fitness from new individual. The best of parameter a given by the value of least fitness because the function of that optimation generate from time of machinery so that will obtainable the best optimal of values with velocity of slice 29,1026 m/menit, eat moving 0,4556 mm and time of slicing 0,1885 min.
DAFTAR ISI
KATA PENGANTAR ... i
ABSTRAK ... iii
ABSTRACT ... iv
DAFTAR ISI ... v
DAFTAR TABEL ... viii
DAFTAR GAMBAR ... iv
DAFTAR SIMBOL ... xii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Tujuan Penelitian ... 2
1.3 Batasan Masalah ... 2
1.4 Manfaat Penelitian ... 2
1.5 Sistematika Penulisan ... 3
BAB II TINJAUAN PUSTAKA ... 4
2.1 Pemotongan Logam ... 4
2.2 Pengertian optimasi ... 6
2.2.1 Metode Optimasi ... 6
2.2.2 Metode OptimasiModern ... 6
2.3 Mesin Sekap ... 6
2.3.1 Jenis-Jenis mesin sekrap ... 7
2.3.2 Mekanisme Kerja Mesin Sekrap ... 9
2.3.3 Bagian Utama Mesin Sekrap ... 10
2.3.4 Bentuk Pahat Sekrap ... 11
2.3.5 Sudut Asah pahat ... 12
2.3.7 Elemen Dasar dan Perencanaan Proses Sekrap ... 13
2.3.8 Proses Sekrap ... 15
2.4 Algoritma Genetika ... 17
2.4.1 Pengenalan Algoritma Genetika ... 17
2.4.2 Aplikasi Algoritma Genetika ... 18
2.4.3 Struktur umum Algoritma Genetika ... 19
2.5 Komponen-Komponen utama Algoritma Genetika ... 20
2.5.1 Teknik Penyandian ... 20
2.6.1 Rank-Based Fitness Assignment ... 23
2.6.2 Seleksi Roda Roulette ... 24
2.6.3 Stochastic universal sampling ... 25
2.6.4 Seleksi Local ... 25
2.6.5 Seleksi Dengan Pemotongan ... 26
2.6.6 Seleksi Dengan Turnamen ... 27
2.11 Algoritma Genetika Dalam Matlab ... 45
BAB III METODOLOGI PENELITIAN... 50
3.1 Tempat Penelitian... 50
3.2 Peralatan pengujian ... 50
3.3 Bahan Pengujian... 52
3.4 Model Optimasi ... 53
3.5 Prosedur Pengujian ... 53
BAB IV ANALISA DATA ... 55
4.1 Perhitungan Algoritma Genetika Secara Manual ... 55
4.1.1 Fungsi Optimasi ... 55
4.1.2 Penentuan parameter ... 57
4.1.3 Inisialisasi Populasi Awal Secara Acak ... 57
4.1.4 Evaluasi Nilai Fitness ... 61
4.1.5 Seleksi ... 62
4.1.6 Crossover ... 68
4.1.7 Mutasi ... 71
4.1.8 Evaluasi Ulang ... 73
BAB V KESIMPULAN DAN SARAN ... 82
5.1 Kesimpulan ... 82
5.2 Saran ... 82
DAFTAR PUSTAKA ... 83
DAFTAR TABEL
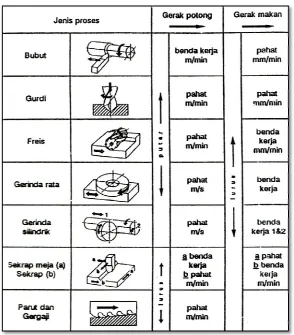
Tabel 2.1 Klasifikasi proses pemesinan menurut Jenis gerakan relative pahat
perkakas potog terhadap benda kerja ... 5
Tabel 2.2 kecepatan potog beberapa logam ... 14
Tabel 4.1 kecepatan potog beberapa logam ntuk pahat HSS ... 56
Tabel 4.2 Populasi acak awal ... 58
Tabel 4.3 Hasil Konversi bilangan biner kebilangan desimal ... 59
Tabel 4.4 Konversi bilangan biner menjadi bilangan riil ... 61
Tabel 4.5 Nilai fitness dari masing–masing kromosom ... 62
Tabel 4.6 Nilai probabilitas seleksi ... 64
Tabel 4.7 Nilai probabilitas kumulatif (qk) ... 65
Tabel 4.8 Kromosom baru ... 67
Tabel 4.9 Induk terpilih ... 69
Tabel 4.10 Populasi baru ... 71
Tabel 4.11 Pemilihan kromosom terpilih ... 72
Tabel 4.12 Hasil mutasi ... 73
Tabel 4.13 Konversi bilangan biner menjadi bilangan desimal ... 74
Tabel 4.14 Konversi bilangan decimal menjadi bilangan riil ... 75
Tabel 4.15 Nilaifitness masing–masing kromosom ... 76
Tabel 4.16 Hasil akhir setelah mutasi (populasi akhir generasi pertama) ... 77
Tabel 4.17 Populasi awal generasi kedua ... 78
Tabel 4.18 Hasil akhir populasi kedua ... 79
DAFTAR GAMBAR
Gambar 2.1 Mesin sekrap datar atau horizontal (Shaper) ... 8
Gambar 2.2 Mesin sekrap vertikal (slotter) ... 8
Gambar 2.3 Mesin sekrap planner ... 9
Gambar 2.4 Mekanisme mesin sekrap ... 9
Gambar2.5 bagian utama mesin sekrap ... 10
Gambar2.6 Bentuk pahat sekrap ... 12
Gambar2.7 Sudut asah pahat ... 12
Gambar 2.8 Jenis bahan pahat ... 13
Gambar 2.9 Penyekrapan alur terus luar ... 16
Gambar2.10 Representasi string bit dan pohon ... 20
Gambar 2.11 Ilustrasi seleksi dengan mesin roulette ... 24
Gambar 2.12 Lingkungan linear ... 25
Gambar 2.13 Lingkungan linear (full and half cross) ... 26
Gambar 2.14 Lingkungan dimensi (full and half star) ... 26
Gambar 2.15 Diagram alir proses crossover ... 28
Gambar 2.16 Ilustrasi crossover satu titik ... 28
Gambar 2.17 Ilustrasi crossover dua titik ... 29
Gambar 2.18 Ilustrasi crossover banyak titik ... 29
Gambar 2.19 Diagram alir proses mutasi ... 31
Gambar 2.20 Proses dan hasil mutasi ... 32
Gambar 2.22 Siklus Algoritma genetika oleh Zbigniew ... 33
Gambar 2.23 Diagram alir algoritma genetika sederhana ... 36
Gambar 2.24 Visualisai gen, allele, kromosom, individu, dan populasi ... 40
Gambar 2.25 pindah silang satu titik ... 43
Gambar 2.26 pindah silang dua titik ... 43
Gambar 2.27 Command windowMatlab ... 45
Gambar 2.28 Toolbox Optimasi pada Matlab ... 46
Gambar 2.29 Cara membuka Toolbox Optimasi secara manual ... 46
Gambar 2.30 Tampilan Toolbox Optimasi ... 47
Gambar 2.31 Penjelasan Toolbox Optimasi ... 47
Gambar 2.32 Window hasil fitness ... 49
Gambar 3.1 Notebook Asus A43S ... 50
Gambar 3.2 Mesin Sekrap Horizontal ... 51
Gambar 3.3 Stopwacth ... 51
Gambar 3.4 Jangka sorong ... 51
Gambar 3.5 Busur ... 52
Gambar 3.6 Baja Lunak ... 52
Gambar 3.7 Diagram alir proses pengerjaan ... 54
Gambar 4.1 Converter binary ... 58
DAFTAR NOTASI
Simbol Arti Satuan
Kedalaman pemotongan
Gerak makan ⁄
F Fitness total -
K Kromosom -
L Panjang pemesinan
mk Panjang kromosom
n Jumlah langkag/menit Langkah/min
Probabilitas crossover -
Probabilitas seleksi -
Probabilitas mutasi -
Batas atas -
Batas bawah -
ST-60 Baja karbon rendah -
Waktu pemesinan
Kecepatan potong ⁄
Kecepatan makan ⁄
xk Nilai riil -
Variabel pertama -
Variabel kedua -
Huruf Yunani
Simbol Arti Satuan
α sudut bebas -
β sudut mata potong (baji)
-γ sudut buang
-ᵟ
sudut potong-Konstanta
ABSTRAK
Algoritma genetika merupakan suatu metode pencarian yang sangat efektif untuk menyelesaikan permasalahan optimasi pada dunia industri atau manufaktur yang memiliki permasalahan–permasalahan kompleks secara lebih mudah dan lebih akurat. Metode pencarian ini didasarkan oleh mekanisme evolusi. Evolusi akan mengakibatkan perubahan yang terus–menerus untuk menuju suatu kesempurnaan atau keseimbangan. Fungsi optimasi pada pengujian ini dibuat dari persamaan waktu permesinan dimana parameter yang digunakan adalah kecepatan potong dengan ambang batas antara 24 m/min sampai dengan 30 m/menit dan gerak makan berkisar antara 0,1 mm sampai dengan 0,5 mm. Proses optimasi dimulai dari membangkitkan populasi awal secara acak kemudian dilakukan seleksi dengan metode roda roulette lalu proses genetika yaitu rekombinasi (crossover) dan mutasi, selanjutnya dievaluasi nilai fitness dari individu baru. Parameter terbaik ditentukan oleh nilai fitness terkecil karena fungsi optimasinya diturunkan dari waktu permesinan sehingga akan diperoleh nilai yang paling optimal dengan kecepatan potong 29,1026 m/menit, gerak makan 0,4556 mm dan waktu pemotongan 0,1885 min.
ABSTRACT
Genetic algorithm is a method of search that very efective to solve the problems of optimation in the world of industries or manufactures are possess any complex of problems be more easily and accurate. This method of search based on the mechanism of evolution. Evolution will effected the change continiously to aim a perfect or balance. The function of optimation at these trials are made from equality of time of machinery where the parameters be used are velocity of slice with range between 24 m/min up to 30 m/menit and eat moving with range between 0,1 mm up to 0,5 mm. The Process of optimation began from awaken of first population randomly then do selection with method of wheel of roulette then the process of genetic that is recombination (crossover) and mutation, furthermore evaluated the value of fitness from new individual. The best of parameter a given by the value of least fitness because the function of that optimation generate from time of machinery so that will obtainable the best optimal of values with velocity of slice 29,1026 m/menit, eat moving 0,4556 mm and time of slicing 0,1885 min.
BAB I
PENDAHULUAN
1.1 Latar Belakang
Seperti yang kita ketahui mesin sekrap (shaping machine) banyak
digunakan di pabrik-pabrik industri, mesin sekrap adalah suatu mesin perkakas
yg digunakan untuk mengubah permukaan benda kerja menjadi permukaan rata
baik bertingkat, menyudut, dan alur. Mesin sekrap memiliki gerakan utama lurus
bolak-balik secara vertikal maupun horizontal, proses permesinan ini hanya dapat
memotong menurut garis lurus dengan jenis/tipe pemotongan yang sama dan
selalu memotong hanya dalam satu arah, sehingga langkah balik merupakan
langkah terbuang/waktu terbuang.[13]
Algoritma genetika adalah algoritma pencarian heuristik yang didasarkan
atas mekanisme dari seleksi alam yang lebih dikenal dengan proses evolusi
biologis. Keuntungan dari algoritma genetika adalah sifat metode pencariannya
yang optimal. Selain itu teknik ini juga mampu mencari sebuah solusi yang baik
dari banyak solusi yang mungkin terjadi, lebih dari pada membatasi pencarian
pada domain yang sempit di mana hasil yang diperoleh kurang memuaskan.
Algoritma genetika mencoba untuk memberikan pencarian solusi dari
pemecahan-pemecahan yang mungkin dan berjumlah hampir tak terbatas. [2]
Kebanyakan permasalahan optimasi pada industri manufaktur memiliki
kekompleksitasan yang sangat tinggi dan sangat sulit untuk di selesaikan dengan
teknik-teknik konvensional. Sejak tahun 1960-an, peningkatan minat para
ilmuwan yang memfokuskan kepada bidang pengimitasian kehidupan telah
menghasilkan berbagai teknik atau pendekatan optimasi yang dapat disebut juga
sebagai algoritma evolusioner, sehingga memungkinkan untuk menyelesaikan
permasalahan-permasalahan optimasi yang kompleks secara lebih mudah dan
akurat. Ada tiga wilayah utama yang tercakup di dalam algoritma evolusioner :
algoritma genetik (GA), pemrograman evolusioner (EP), dan strategi evolusi (ES).
Di antara ketiga pendekatan ini, algoritma genetik yang lebih populer
Untuk memaksimal kinerja mesin sekrap agar dapat beroperasi dengan
lebih baik, maka digunakan algoritma genetika untuk mengoptimalkan setiap
parameter – parameter yang ada pada mesin sekrap.
1.2 Tujuan Penelitian
Adapun tujuan penelitian adalah
1. Memahami tentang pemesinan pada mesin sekrap (shaping) dan
menentukan nilai optimum dari parameter mesin sekrap yang terbaik.
2. Membandingkan nilai optimum antara hasil perhitungan algoritma
genetika secara manual dengan perhitungan algoritma genetika
menggunakan software MATLAB 2011.
1.3 Batasan Masalah
Adapun batasan masalah pada penelitian ini adalah
1. Penelitian ini menggunaan Algoritma Genetika untuk optimasi pemesinan
pada mesin Sekrap Model L - 450.
2. Parameter pemesinan yang dioptimasi adalah kecepatan potong (V),
kecepatan makan (Vf), gerak makan (f) dan waktu pemotongan (tc).
3. Pengujian pemesinan dilakukan di Laboratorium Teknologi Mekanik
Universitas Sumatera Utara dan pengujian tersebut hanya melakukan
pengujian pembuatan alur V dengan kedalaman 2mm.
4. Perancangan dan analisis sistem yang dibuat menggunakan program bantu
MATLAB 2011.
5. Metode algoritma genetik yang digunakan adalah model SGA (Simple
Genetic Algorithm).
1.4 Manfaat Penelitian
Adapun manfaat penelitian adalah sebagai berikut
1. Bagi peneliti, dapat menerapkan apa yang dipelajari di buku dengan
melakukan langsung proses optimasi parameter pemesinan dengan
menggunakan algoritma genetika.
2. Bagi universitas, dapat menambah pengetahuan tentang hasil penelitian
3. Bagi industri manufaktur, dapat meningkatkan keoptimalan proses
produksi khususnya dibagian pemesinan produk, sehingga menghasilkan
produk yang lebih berkualitas.
1.5 Sistematika Penulisan
Adapun sistematika penulisan adalah sebagai berikut:
Bab I Pendahuluan
Bab ini menjelaskan pendahuluan tentang studi kasus dan pemecahan masalah
yang berisi antara lain : latar belakang, batasan masalah, tujuan penelitan, manfaat
penelitian, dan sistematika penulisan.
Bab II Tinjauan Pustaka
Bab ini berisikan tinjauan pustaka, diantaranya mengenai teori yang berhubungan
dengan penelitian, yaitu teori dasar algoritma genetik, prosedur pelaksanaan
algoritma genetik, teori dasar pemesinan pada mesin sekrap, dan parameter proses
pemesinan mesin sekrap.
Bab III Metodologi
Bab ini berisi tata cara penelitian yang akan dilakukan, dimulai dari peralatan,
bahan, dan optimasi pemesinan mesin sekrap (shaping) dengan menggunakan
algoritma genetik.
Bab IV Analisa Data
Bab ini berisi hasil analisis penggunaan algoritma genetik untuk optimasi
pemesinan pada mesin sekrap (shaping).
Bab V Kesimpulan dan Saran
Bab ini berisi kesimpulan dari analisa berdasarkan tujuan skripsi dan saran untuk
BAB II
TINJAUAN PUSTAKA
2.1 Pemotongan Logam
Proses pemotongan logam merupakan suatu proses yang
digunakan untuk mengubah bentuk suatu produk dari logam (komponen
mesin) dengan cara memotong. Proses pemesinan dengan menggunakan
prinsip pemotongan logam dibagi dalam tiga kelompok dasar, yaitu :
proses pemotongan dengan mesin pres, proses pemotongan konvensional
dengan mesin perkakas, dan proses pemotongan non konvensional.
Proses pemotongan dengan menggunakan mesin pres meliputi
pengguntingan (shearing), pengepresan (pressing) dan penarikan
(drawing, elongating). Proses pemotongan konvensional dengan mesin
perkakas meliputi proses bubut (turning), proses frais (milling), dan
sekrap (shaping). Proses pemotongan non konvensional contohnya
dengan mesin EDM (Electrical Discharge Machining) dan wire cutting.
Proses pemotongan logam ini biasanya disebut proses pemesinan,
yang dilakukan dengan cara membuang bagian benda kerja yang tidak
digunakan menjadi beram (chips), sehingga terbentuk benda kerja. Dari
semua prinsip pemotongan di atas pada buku ini akan dibahas tentang
proses pemesinan dengan menggunakan mesin perkakas [11].
Proses permesinan (Machining process) merupakan proses
pembentukan suatu produk dengan pemotongan dan menggunakan mesin
perkakas. Umumnya, benda kerja yang di gunakan berasal dari proses
sebelumnya, seperti proses penuangan (Casting) dan proses
pembentukan (Metal Forging). Proses permesinan ini berdasarkan bentuk
alat potong dapat di bagi menjadi 2 tipe, yaitu :
1. Bermata potong tunggal (single point cutting tools)
2. Bermata potong jamak (multiple points cuttings tools)
Secara umum, gerakan pahat pada proses permesinan terdapat 2
tipe yaitu : gerak makan (feeding movement) dan gerak potong (cutting
makannya, pr
, proses pemesinan dapat di bagi menjadi bebe
es Bubut (Turning)
es Gergaji atau parut (Sawing, Broaching)
2.1 klasifikasi proses pemesinan menurut jenis
pahat/perkakas potong terhadap benda kerja,
oses pemesinan adalah proses yang paling bany
nghasilkan suatu produk jadi yang berbahan baku l
kan sekitar 60% sampai 80% dari seluruh proses
n mesin yang komplit dilakukan dengan proses pe
2.2 Pengertian Optimasi
Optimasi adalah suatu proses untuk mencapai hasil ideal atau
optimal (nilai efektif yang dapat dicapai), optimasi merujuk pada studi
permasalahan yang mencoba untuk mencari nilai minimum dan
maksimum yang akan memberikan solusi optimal. (Wikipedia : Optimasi
2007)
2.2.1 Metode Optimasi
Metode mencari nilai optimum dikenal sebagai teknik
mathematical programming dan bisa di pelajari sebagai riset operasi.
Riset operasi adalah cabang matematika yang berkaitan dengan
penerapan metode ilmiah pengambilan keputusan dan penerapan metode
ilmiah dan teknik pengambilan keputusan dan penetapan penyelesaian
terbaik atau optimal. Perkembangan metode optimasi semakin
mengalami kemajuan hingga masa modern sekarang, hal ini dilihat
dengan semakin banyak metode optimasi yang popular dan banyak
dipakai antara lain seperti dynamic programming, integer programming,
game theory, dan metode optimasi modern. [2]
2.2.2 Metode Optimasi Modern
Metode optimasi modern juga disebut metode optimasi yang
ampuh dan populer untuk menyelesaikan masalah teknik optimasi yang
komplek. Metode yang tergolong dalam metode optimasi modern adalah:
• Algoritma genetika (Genetic Algorithm)
• Optimasi partikel swarm (Particle Swarm Optimization)
• Optimasi koloni semut (Ant Colony Optimization)
• Optimasi berbasis jaringan syaraf tiruan
• Optimasi fuzzy (Fuzzy Optimization), dan
• Simulasi Penguatan (Simulated annealing)
2.3 Mesin sekrap (shaping)
Mesin sekrap (Shaping) adalah mesin perkakas yang mempunyai
gerak utama bolak-balik horizontal dan berfungsi untuk merubah bentuk
pada saat gerakan maju, dengan gerakan ini dihasilkan pekerjaan
meratakan bidang, membuat alur, membuat bidang bersudut atau
bertingkat dan membentuk bidang-bidang yang tidak beraturan.Prinsip
kerja mesin sekrap adalah gerakan berputar dari motor diubah menjadi
gerak lurus/gerak bolak-balik melalui blok geser dan lengan penggerak.
Possisi langkah dapat diatur dengan spindle posisi dan untuk mengatur
panjang langkah dengan bantuan blok geser. [13]
2.3.1 Jenis – Jenis Pemesinan Mesin Sekrap
Mesin Sekrap adalah mesin yang relatif sederhana. Biasanya
digunakan dalam ruang alat atau untuk mengerjakan benda kerja yang
jumlahnya satu atau dua buah untuk prototype (benda contoh). Pahat
yang digunakan sama dengan pahat bubut. Proses sekrap tidak terlalu
memerlukan perhatian/konsentrasi bagi operatornya ketika melakukan
penyayatan. Mesin Sekrap yang sering digunakan adalah Mesin Sekrap
horizontal. Selain itu, ada Mesin Sekrap vertical yang biasanya
dinamakan mesin slotting/slotter. Proses sekrap ada dua macam yaitu
proses sekrap (shaper) dan planner. Proses sekrap dilakukan untuk
benda kerja yang relatif kecil, sedang proses planner untuk benda kerja
yang besar. [11]
Jenis mesin sekrap yang umum digunakan adalah sebagai
berikut:
1. Mesin Sekrap Datar atau Horizontal (Shaper)
Mesin jenis ini umum dipakai untuk produksi dan pekerjaan
serbaguna terdiri atas rangka dasar dan rangka yang mendukung
lengan horizontal. Benda kerja didukung pada rel silang sehingga
memungkinkan benda kerja untuk digerakkan ke arah menyilang atau
vertikal dengan tangan atau penggerak daya.Pada mesin ini pahat
melakukan gerakan bolak-balik, sedangkan benda kerja melakukan
gerakan ingsutan. Panjang langkah maksimum sampai 1.000 mm,
Gambar 2.1 Mesin Sekrap Datar atau Horizontal (Shaper)
(Sumber:Laboratorium Teknologi Mekanik dan Laboratorium Ilmu Logam Fisik Universitas
Sumatera Utara, 2013)
2. Mesin Sekrap Vertikal (Slotter)
Mesin sekrap jenis ini digunakan untuk pemotongan dalam,
menyerut dan bersudut serta untuk pengerjaan permukaan-permukaan
yang sukar dijangkau. Selain itu mesin ini juga bisa digunakan untuk
operasi yang memerlukan pemotongan vertikal. Gerakan pahat dari
mesin ini naik turun secara vertikal, sedangkan benda kerja bisa
bergeser kearah memanjang dan melintang. Mesin jenis ini juga
dilengkapi dengan meja putar, sehingga dengan mesin ini bisa dilakukan
pengerjaan pembagian bidang yang sama besar.
Gambar 2.2 Mesin Sekrap Vertikal (Slotter)
(Sumber: http://google/indoteknik.com, 2013)
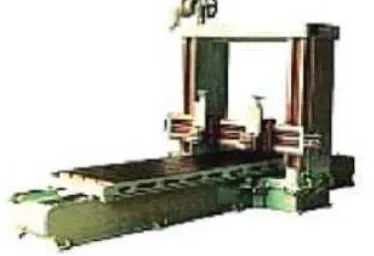
3. Mesin Sekrap Planner
Digunakan untuk mengerjakan benda kerja yang panjang dan
besar (berat). Benda kerja dipasang pada eretan yang melakukan gerak
penyetelan. Lebar benda ditentukan oleh jarak antartiang mesin.
Panjang langkah mesin jenis ini ada yang mencapai 200 sampai 1.000
mm.
Gambar 2.3 Mesin Sekrap Planner
(Sumber: http://google/indoteknik.com, 2013)
2.3.2 Mekanisme Kerja Mesin Sekrap
Mekanisme yang mengendalikan Mesin Sekrap ada dua macam
yaitu mekanik dan hidrolik. Pada mekanisme mekanik digunakan crank
mechanism (Gambar 2.25). Pada mekanisme ini roda gigi utama (bull
gear) digerakkan oleh sebuah pinion yang disambung pada poros motor
listrik melalui gear box dengan empat, delapan, atau lebih variasi
kecepatan. RPM dari roda gigi utama tersebut menjadi langkah per menit
(strokes per minute, SPM). Gambar s kematik mekanisme dengan sistem
hidrolik dapat dilihat pada Gambar 2.25. Mesin dengan mekanisme
system hidrolik kecepatan sayatnya dapat diukur tanpa bertingkat, tetap
sama sepanjang langkahnya. Pada tiap saat dari langkah kerja,
langkahnya dapat dibalikkan sehingga jika mesin macet lengannya dapat
ditarik kembali. Kerugiannya yaitu penyetelen panjang langkah tidak
teliti.
2.3.3 Bagian
krap terdiri atas beberapa bagian seperti di bawa
Gambar 2.5 Bagian Utama Mesin Sekrap [11]
n:
esin
erupakan keseluruhan mesin tempat mekanik
ngatur.
esin
ungsinya merupakan tempat kedudukan ben
benda kerja. Meja mesin didukung dan digerakka
n eretan tegak. Eretan lintang dapat diatur otom
ungsinya untuk menggerakan pahat maju mundu
gkol menggunakan pengikat lengan. Keduduka
n dijepit pelindung lengan agar gerakannya lurus
n pahat
ungsinya untuk mengatur ketebalan pemakana
roda pemutar maka pahat akan turun atau na
n dapat dibaca pada dial. Eretan pahat terpa
gan dengan ditumpu oleh dua buah mur baut pe
iringkan untuk penyekrapan bidang bersudut
ngan eretan dapat dibaca pada pengukur sudut eret
ur kecepatan
ungsinya untuk mengatur atau memilih jumlah
6) Tuas panjang langkah
Berfungsi mengatur panjang pendeknya langkah pahat atau
lengan sesuai panjang benda yang disekrap.Pengaturan dengan memutar
tap ke arah kanan atau kiri.
7) Tuas posisi pahat
Tuas ini terletak pada lengan mesin dan berfungsi untuk
mengatur kedudukan pahat terhadap benda kerja. Pengaturan dapat
dilakukan setelah mengendorkan pengikat lengan.
8) Tuas pengatur gerakan otomatis meja melintang
Untuk menyekrap secara otomatis diperlukan
pengaturan-pengaturan panjang engkol yang mengubah gerakan putar mesin pada
roda gigi menjadi gerakanlurus meja. Dengan demikian meja melakukan
gerak ingsutan (feeding).
2.3.4 Bentuk Pahat Sekrap
Pahat sekrap terdiri dari beberapa macam sesuai dengan
(h)
(i) (j)
Gambar 2.6 Bentuk Pahat Sekrap [11]
Keterangan:
a) pahat sekrap kasar lurus
b) pahat sekrap kasar lengkung
c) pahat sekrap
d) pahat sekrap runcing
e) pahat sekrap sisi
f) pahat sekrap sisi kasar
g) pahat sekrap sisi datar
h) pahat sekrap profil
i) pahat sekrap masuk ke dalam atau pahat sekrap masuk ke luar lurus.
j) pahat sekrap masuk dalam atau pahat sekrap masuk ke luar diteruskan.
2.3.5 Sudut asah Pahat
Keterangan:
α = sudut bebas
β = sudut mata potong (baji)
γ = sudut buang
ᵟ = sudut potong (α + β)
2.3.6 Jenis bahan Pahat
Terdapat dua jenis bahan pahat seperti terlihat di bawah
Gambar 2.8 jenis bahan pahat
a) H.S.S (High Speed Steel) digunakan untuk memotong material
yang mempunyai tegangan tarik tinggi.
b) Carbide digunakan untuk benda – benda tuangan.
2.3.7 Elemen Dasar dan Perencanaan Proses Sekrap
Elemen pemesinan dapat dihitung dengan rumus-rumus yang
identik dengan elemen pemesinan proses pemesinan yang lain.
2.3.7.1Kecepatan potong (Cutting Speed):
Kecepatan potong biasanya dinyatakan dalam isitilah m/menit,
yaitu kecepatan dimana pahat melintasi benda kerja untuk mendapatkan
hasil yang paling baik pada kecepatan yang sesuai. Kecepatan potong
dipengaruhi oleh dua faktor, yaitu: kekerasan dari bahan yang akan
dipotong dan jenis alat potong yang digunakan. Untuk keperluan ini
digunakan persamaan sebagai berikut:
=
(m/menit) atau np
=
………...(2.1)Dimana: = Kecepatan Potong (m/menit)
Berikut ini adalah tabel mengenai kecepatan potong beberapa
bahan logam.
Tabel 2.2 Kecepatan potong beberapa logam
No. Nama Bahan Kecepatan Potong (m/menit)
1. Baja Lunak 24-30
2. Baja perkakas 12-18
3. Besi Tuang abu-abu 18-24
4. Kuningan keras 20-45
5. Kuningan lunak 60
6. Tembaga 60
7. Alumunium 300
(Sumber: George Love dan Harus A.R. 1986:190)
2.3.7.2 Kecepatan Pemakanan
Kecepatan pemakanan adalah pergerakan titik sayat alat potong
per satu putaran benda kerja. Dalam proses sekrap, kecepatan
pemakanan dinyatakan dalam mm/min dan dapat di hitung dengan
menggunakan persamaan berikut:
f= f x np ……… (2.2)
Dimana : f = kecepatan makan (m/menit)
f = gerak makan (mm/langkah)
np = Jumlah langkah per menit (langkah/menit)
2.3.7.3Waktu Pemotongan (Cutting Time):
Cutting time adalah waktu pemotongan dalam pemesinan mesin
sekrap, yang dapat diukur dengan persamaan :
Dimana : tc = Kecepatan makan(menit)
w = lebar pemotongan benda kerja (mm)
2.3.8 Proses Sekrap
1) Menjalankan mesin
- Lengan digerakkan dengan cara memutar roda pemeriksa untuk melihat kemungkinan tertabraknya lengan
- Menentukan banyak langkah per menit - Motor mesin dihidupkan
- Dengan cara memasukkan tuas kopling mesin mulai bekerja - Mencoba langkah pemakanan (feeding) dari meja, mulai dari - langkah halus sampai langkah kasar
- Perhatikan seluruh gerak mesin
- Menghentikan kerja mesin dilakukan dengan cara melepas - tuas kopling kemudian matikan motor.
2. Proses penyekrapan - Penyekrapan datar
Penyekrapan bidang rata adalah penyekrapan benda kerja
agar menghasilkan permukaan yang rata. Penyekrapan bidang
rata dapat dilakukan dengan cara mendatar (horizontal) dan cara
tegak (Vertical). Pada penyekrapan arah mendatar yang bergerak
adalah benda kerja atau meja ke arah kiri kanan. Pahat
melakukan langkah penyayatan dan ketebalan diatur dengan
menggeser eretan pahat.
- Penyekrapan tegak
Pada penyekrapan tegak, yang bergerak adalah eretan
pahat naik turun. Pengaturan ketebalan dilakukan dengan
menggeser meja. Pahat harus diatur sedemikian rupa (menyudut)
sehingga hanya bagian ujung saja yang menyayat dan bagian sisi
dalam keadaan bebas. Tebal pemakanan di atur tipis ± 50 mm.
Langkah kerja penyekrapan tegak sesuai dengan
penyekrapan yang datar.
(1) Kedalaman pemotongan dilakukan oleh gerakan meja
(2) Feeding dilakukan oleh gerakan eretan alat potong.
- Penyekrapan menyudut
Penyekrapan bidang menyudut adalah penyekrapan benda
kerja agar menghasilkan permukaan yang miring/sudut. Pada
penyekrapan ini yang bergerak adalah eretan pahat maju mundur.
Pengaturan ketebalan dilakukan dengan memutar
eretenpahat sesuai dengan kebutuhan sudut pemakanan :
(1) Kedalaman pemotongan dilakukan oleh gerakan meja
(2) Feeding dilakukan oleh eretan alat pemotong.
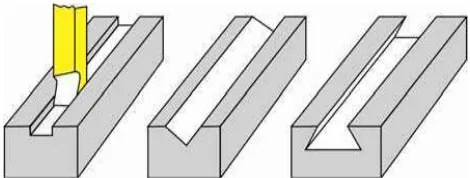
- Penyekrapan alur
Menurut alur penyekrapan, Mesin Sekrap dapat digunakan
untuk membuat alur :
(1) Alur terus luar
(2) Alur terus dalam
(3) Alur buntu
(4) Alur tembus.
Alur terus luar di antaranya adalah alur “U”, alur “V”, dan
alur ekor burung.
2.4 Algoritma Genetika
2.4.1 Pengenalan Algoritma Genetika
Algoritma genetik pertama kali diperkenalkan oleh John Holland
dari Universitas Michigan pada tahun 1975. John Holland bersama
murid-murid serta rekan kerjanya lalu mempublikasikan tulisannya
berjudul “Adapted in Natural and Artificial System”. Dalam tulisan
tersebut dijelaskan bahwa algoritma genetik sangat cocok digunakan
untuk memecahkan masalah optimasi kompleks dan juga untuk aplikasi
yang membutuhkan pemecahan masalah adaptif. Sehingga dengan
beberapa keunggulan tersebut, algoritma genetik diterima pada berbagai
kalangan dan telah diaplikasikan pada berbagai bidang
Algoritma genetik merupakan metode pencarian stokastik yang
diilhami oleh proses biologi yang dapat diterapkan pada sebagian besar
permasalahan. Algoritma genetik memodelkan mekanisme seleksi alam
dan proses genetik untuk menuntun suatu pencarian seperti cara-cara
alam dalam menyelesaikan permasalahan adaptasi organisme untuk
mempertahankan kelangsungan hidupnya.
Algoritma genetika banyak diaplikasikan untuk berbagai macam
permasalahan, seperti: permasalah optimasi, pemrograman otomatis,
machine learning, model ekonomi, model sistem imunisasi, dan model
ekologis. Algoritma genetika juga sangat berguna dan efisien untuk
mengatasi masalah dengan karakteristik sebagai berikut : Ruang
masalah sangat besar, kompleks, dan sulit dipahami, tidak tersedianya
analisis matematika yang memadai, ketika metode-metode konvensional
sudah tidak mampu menyelesaikan masalah yang dihadapi, solusi yang
diharapkan tidak harus paling optimal, tetapi cukup “bagus” atau bisa
diterima, terdapat batasan waktu, misalnya dalam real time system atau
sistem waktu nyata.
Algoritma genetik memiliki perbedaan yang mendasar dengan
metode pencarian solusi optimal berbasis model matematika kalkulus,
1. Mekanisme optimasi algoritma genetik bekerja berdasarkan kromosom,
dimana setiap kromosom menyimpan informasi parameter-parameter
tersebut.
2. Proses pencarian solusi optimal pada mekanisme algoritma genetik tidak
dilakukan pada satu titik pencarian, tetapi pada sekumpulan titik
pencarian.
3. Algoritma genetik tidak membutuhkan prosedurprosedur matematis
dalam mencari solusi optimal tetapi algoritma genetik menggunakan
informasi langsung dari hasil transfer tiap-tiap parameternya ke suatu
fungsi yang dapat mewakili tujuan dari proses optimasi yang sedang
dilakukan.
4. Mekanisme genetik digunakan dalam pemrosesan kode parameter suatu
permasalahan, melalui proses seleksi, rekombinasi dan mutasi untuk
memperoleh solusi optimal.
5. Proses pencarian solusi optimal menggunakan metode algoritma genetik
menggunakan titik acuan sembarang, untuk menghindari solusi optimal
lokal.
6. pencarian terbimbing diberikan melalui penilaian terhadap kualitas kode
atau kromosom yang dimiliki oleh setiap individu dalam suatu generasi.
2.4.2 Aplikasi Algoritma Genetika
Algoritma genetika telah digunakan untuk memecahkan masalah
dibidang teknik, bisnis, dan hiburan, termasuk:
1. Optimasi: algoritma genetika banyak digunakan dalam berbagai tugas
optimasi, termasuk optimasi numerik dan masalah-masalah optimasi
kombinatorial seperti TPS (traveling salesman problem), job shop
scheduling, dan desain sirkuit.
2. Pemrograman otomatis: algoritma genetika telah digunakan untuk
berevolusi terhadap program komputer untuk melakukan tugas-tugas
yang spesifik dan merancang struktur komputasi lain.
3. Machine Learning: algoritma genetika banyak digunakan untuk aplikasi
mesin-learning, termasuk klasifikasi dan prediksi struktur protein.
Algoritma genetika juga telah digunakan untuk merancang jaringan
4. Model Ekonomi: algoritma genetikatelah digunakan untuk memodelkan
proses inovasi, pengembangan strategi penawaran, dan munculnya pasar
ekonomi.
5. Model sistem imunisasi: algoritma genetika telah digunakan untuk
memodelkan beberapa aspeksistem kekebalan tubuh alami, termasuk
mutasi somatik selama masa hidup individu dan menemukan keluarga
dengan gen ganda selama evolusi.
6. Model ekologi: algoritma genetikatelah digunakan untuk memodelkan
fenomena ekologi seperti hosp-parasite co-evolution, dan arus sumber
daya dalam ekologi.
7. Interaksi antara evolusi dan pembelajaran: algoritma genetika telah
banyak digunakan untuk mempelajari bagaimana individu belajar dan
memengaruhi proses evolusi suatu spesies satu sama lain.
2.4.3 Struktur Umum Algoritma Genetika
Pada algortima genetika ini, teknik pencarian dilakukan sekaligus
atas sejumlah solusi yang mungkin dikenal dengan istilah populasi.
Individu yang terdapat dalam suatu populasi disebut dengan istilah
kromosom. Kromosom ini merupakan suatu solusi yang masih berbentuk
simbol. Populasi awal dibangun secara acak, sedangkan populasi
berikutnya merupakan hasil evolusi kromosom-kromosom melalui iterasi
yang disebut istilah generasi. Pada setiap generasi, kromosom akan
melalui proses evaluasi denganmenggunakan alat ukur yg di sebut
dengan fungsi fitness.
Nilai fitness dari suatu kromosom akan menunjukkan kualitas
kromosom dalam populasi tersebut. Generasi berikutnya dikenal dengan
istilah anak (off-spring) terbentuk dari gabungan 2 kromosom generasi
sekarang bertindak sebagai induk (parent) dengan menggunakan
operator penyilangan (crossover). Selain operator penyilangan, suatu
kromosom dapat juga dimodifikasi dengan menggunakan operator
mutasi. Populasi generasi yang baru dibentuk dengan cara menyeleksi
nilai fitness dari kromosom induk (parent) dan nilai fitness dari
lainnya sehi
hingga ukuran populasi (jumlah kromosom
konstan. Setelah melalui beberapa generasi,
ni akan konvergen ke kromosom terbaik.
Komponen Utama Algoritma Genetika
da 6 komponen utama dalam algoritma geneti
n, prosedur inisialisasi, fungsi evaluasi, se
dan penentuan parameter.
knik penyandian
knik penyandian atau biasa disebut juga tekni
liputi penyandian gen dan kromosom. Gen me
osom, satu gen biasanya akan mewakili satu var
n dapat di presentasikan dalam bentu: sting bi
real, daftar aturan, elemen permutasi, elemen
si lainnya dapat diimplementasikan untuk ope
menunjukkan representasi string bit dan pohon.
0 1 0 1 0 0 1 0 1 1 1
gen – 1 gen – 2 gen – 3
gen – 1 gen – 2 gen – 3
Gambar 2.10 Representasi string bit dan pohon
mikian juga, kromosom dapat direpresent
3. Elemen Permutasi : E2, E10, E5, dst
4. Daftar Aturan : R1, R2, R3, dst
5. Elemen Program : pemrograman genetika, dst
6. Struktur lainnya
2.5.2 Proses inisialisasi (Membangkitkan populasi awal)
Ukuran populasi tergantung pada masalah yang akan dipecahkan
dan jenis operator gen etika yang akan diimplementasikan. Setelah
ukuran populasi ditentukan, kemudian harus dilakukan inisialisasi
terhadap kromosom yang terdapat pada populasi tersebut. Inisialisasi
kromosom dilakukan secara acak, namun demikian harus tetap
memperhatikan domain solusi dan kendala permasalahanyang ada.
2.5.3 Fungsi evaluasi
Ada 2 hal yang harus diperhatikan dalam melakukan evaluasi
kromosom, yaitu: evaluasi fungsi objektif (fungsi tujuan) dan konveksi
fungsi objektif ke dalam fungsi fitness. Secara umum, fungsi fitness
diturunkan dari fungsi objektif dengan nilai yang tidak negatif. Apabila
ternyata fungsi objektif memiliki nilai negatif, maka perlu ditambahkan
suatu konstanta C agar nilai fitness yang terbentuk menjadi tidak negatif.
2.5.4 Seleksi
Seleksi ini bertujuan untuk memberikan kesempatan reproduksi
yang lebih besar bagi anggota populasi yang paling fit.
Ada beberapa metode seleksi dari induk, antara lain:
• Rank-based fitness assignment.
• Roulette wheel selection.
• Stochastic universal sampling.
• Local selesction.
• Truncation selsction.
• Tournamen selection.
Dari beberapa metode seleksi tersebut, metode seleksi roda
roulette (Roulette wheel selection) adalah metode yang paling sederhana
2.5.5 Operator genetika
Ada 2 operator genetika, yakni sebagai berikut:
1. Operator untuk melakukan rekombinasi, yang terdiri dari:
• Rekombinasi bernilai real - Rekombinasi diskret
- Rekombinasi intermediate (menengah)
- Rekombinasi garis
- Rekombinasi garis yang diperluas
• Rekombinasi bernilai biner (crossover) - Crossover satu titik
- Crossover banyak titik
- Crossover seregam
• Crossover dengan permutasi 2. Mutasi
• Mutasi bernilai real
• Mutasi bernilai biner
• Mutasi kromosom permutasi 2.5.6 Penentuan parameter
Yang disebut dengan perameter disini adalah parameter control
algoritma genetika, yaitu: ukuran populasi (popsize), peluang crossover
(Pc), dan peluang mutasi (pm). Nilai parameter ini ditentukan berdasarkan permasalahan yang akan dipecahkan. Ada beberapa rekomendasi yang
bisa digunakan, antara lain:
• Untuk permasalahan yang memiliki kawasan solusi cukup besar, De Jong merekomendasikan untuk nilai parameter kontrol:
(popsize; Pc; pm) = (50; 0,6; 0,001).
• Bila rata-rata fitness setiap generasi digunakan sebagai indicator, maka Grefenstette merekomendasikan:
(popsize; Pc; pm) = (30; 0,95; 0,01).
• Bila fitness dari individu terbaik dipantau pada satiap generasi, maka usulannya adalah:
(popsize; Pc; pm) = (80; 0,45; 0,01).
2.6 Seleksi
Seleksi digunakan untuk memilih individu-individu mana saja
yang akan dipilih untuk proses pindah silang dan mutasi. Seleksi
digunakan untuk mendapatkan calon induk yang baik. Semakin tinggi
nilai fitness suatu individu, semakin besar kemungkinannnya untuk
terpilih. Langkah pertama yang dilakukan dalam seleksi ini adalah
pencarian nilai fitness. Nilai fitness ini yang nantinya akan digunakan
pada tahap-tahap seleksi berikutnya.
Masing-masing individu dalam wadah seleksi akan menerima
probabilitas reproduksi yang tergantung pada nilai objektif dirinya
sendiri terhadap nilai objektif dari semua individu dalam wadah seleksi
tersebut. Proses seleksi akan menentukan individu-individu mana saja
yang akan dipilih untuk dilakukan rekombinasi dan bagaimana offspring
terbentuk dari individu - individu terpilih tersebut.
2.6.1 Rank-Based Fitness Assignment
Pada rank-based fitness assignment, populasi diurutkan menurut
nilai objektifnya. Nilai fitness dari tiap-tiap individu hanya tergantung
pada posisi individu tersebut dalam urutan, dan tidak dipengaruhi oleh
nilai objektifnya.
Misalkan N adalah jumlah individu dalam suatu populasi. Pos
adalah posisi individu dalam populasi tersebut (posisi terendah suatu
individu adalah pos = 1, dan posisi tertingginya adalah pos = N).
sedangkan SP adalah selective pressure. Nilai fitness dari suatu individu
dapat di hitung sebagai:
• Linear rangking:
Fitness(Pos) = 2 – SP + 2(SP – 1)(Pos – 1) / (N – 1)
Nilai SPϵ [1,2].
• Non-linear rangking:
Fitness(Pos) = Nind * X ^ (Pos – 1) / Sum(X^(i-1); I = 1... N
Nilai SPϵ [1,2].
(SP – 1) * X ^(N – 1) + SP* X ^(N – 2) + … + SP* X + SP = 0
Nilai SPϵ [1, N – 2].
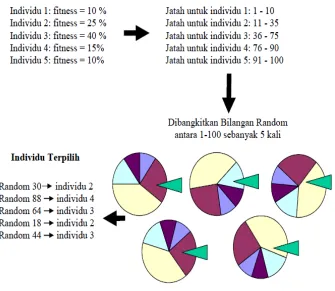
2.6.2 Seleksi Roda Roulette (Roulette wheel selection)
Metode seleksi dengan mesin roulette ini merupakan metode
yang paling sederhana dan sering dikenal dengan nama Stochastic
Sampling With Replacement. Cara kerja metode ini adalah sebagai
berikut:
1. Dihitung nilai fitness dari masing-masing individu (fi, dimana i adalah individu ke-1 sampai ke-n).
2. Dihitung total fitness se
3. mua individu.
4. Dihitung pobabilitas masing-masing individu.
5. Dari probabilitas tersebut, dihitung jatah masing-masing individu
pada angka 1 sampai 200.
6. Dibangkitkan bilangan random antara 1 sampai 200.
Dari bilangan random yang dihasilkan, ditentukan individu mana
yang terpilih dalam proses seleksi.
2.6.3 Stochastic universal sampling
Stochastic universal sampling memiliki nilai bias nol dan dan
penyebaran yang minimum. Pada metode ini, individu - individu
dipetakan dalam suatu segmen garis secara berutan sedemikian hingga
tiap-tiap segmen individu memiliki ukuran yang sama denganukuran
fitnessnya seperti halnya pada seleksi
2.6.4 Seleksi Lokal (Local selesction)
Pada seleksi lokal, Setiap individu yang berada didalam
konstrain tertentu disebut dengan nama lingkungan lokal. Interaksi antar
individu hanya dilakukan didalam wilayah tersebut. Lingkungan tersebut
ditetapkan sebagai struktur dimana populasi tersebut terdistribusi.
Lingkungan tersebut juga dapat dipandang sebagai kelompok
pasangan-pasangan yang potensial.
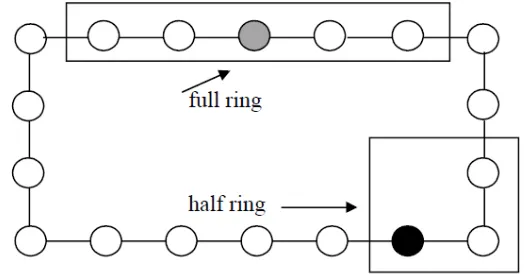
Gambar 2.12 menunjukkan seleksi lokal, dalam lingkungan
linear (full and half ring)
Gambar 2.12 Lingkungan Linear (full and half ring); jarak = 2
Langkah pertama adalah menyeleksi separuh pertama dari
populasi yang berpasangan secara random. Kemudian lingkungan baru
tersebut diberikan pada setiap individu yang terseleksi. Pada lingkungan
yang baru tersebut, kita bisa menyeleksi pasangan-pasangan yang cocok
atau pasangan yang terbaik, pasangan yang memiliki fitness
proporsional, atau pasangan yang seragam. Struktur lingkungan pada
• Linear : full ring dan half ring
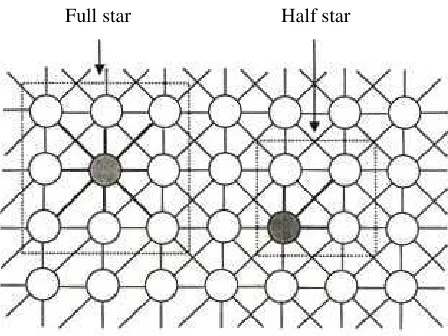
• Dimensi-2:
-full cross dan half cross
-full star dan half star
• Dimensi-3 dan struktur yang lebih kompleks yang merupakan kombinasi dari kedua struktur diatas.
Gambar 2.13 Lingkungan Dimensi – 2 (full and half cross); jarak = 1
Full star Half star
Gambar 2.14 Lingkungan Dimensi – 2 (full and half star); jarak = 1
2.6.5 Seleksi dengan Pemotongan (Truncation selesction)
Pada metode – metode seleksi yang telah di jelaskan terdahulu, ,
seleksi dilakukan secara alami. Pada seleksi dengan pemotongan ini,
lebih berkesan sebagai seleksi buatan. Seleksi ini biasanya digunakan
oleh populasi yang jumlahnya sangat besar. Pada metode ini, seleksi
Individu-individu diurutkan berdasarkan nilai fitnessnya. Hanya individu
yang terbaik saja yang akan diseleksi sebagai induk Parameter yang
ukuran populasi yang akan diseleksi sebagai indukyang berkis arantara
50% -10%.Individu-individu yang ada di bawah nilai ambang ini tidak
akan menghasilkan keturunan.
2.6.6 Seleksi dengan Turnamen ( Tournamen Selection)
Pada metode seleksi dengan turnamen, ditetapkan suatu nilai tour
untuk individu-individu yang dipilih secara random dari suatu populasi.
Individu-individu yang terbaik dalam kelompok ini akan diseleksi
sebagai induk. Parameter yang digunakan pada metode ini adalah ukuran
tour yang bernilai antara 2 sampai N (jumlah individu dalam suatu
populasi).
2.7 Rekombinasi
2.7.1 Rekombinasi bernilai real
- Rekombinasi diskret
- Rekombinasi menengah (intermediate)
- Rekombinasi garis
- Rekombinasi garis yang diperluas
2.7.2 Rekombinasi bernilai biner (crossover)
Pindah silang (Crossover) adalah operator dari Algoritma
genetika yang melibatkan dua induk untuk membentuk kromosom baru.
Pindah silang menghasilkan titik baru dalam ruang pencarian yang siap
untuk diuji. Operasi ini tidak selalu dilakukan pada semua individu yang
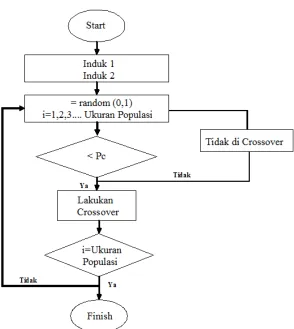
ada. Individu dipilih secara acak untuk dilakuakn crossing dengan Pc antara 0.6 sampai 0.95. Jika pindah silang tidak dilakukan,maka nilai
dari induk akan diturunkan kepada keturunan.
Prinsip dari pindah silang ini adalah melakukan operasi
(pertukaran, aritmatika) pada gen-gen yang bersesuaian dari dua induk
untuk menghasilkan individu baru. Proses crossover dilakukan pada
setiap individu dengan probabilitas crossover yang ditentukan. Pada
gambar 2.4 diilustrasikan diagram alir penggunaan probabilitas
crossover pada proses crossover. Operator crossover ini bergantung pada
Gambar 2.15 Diagram alir proses crossover
2.7.2.1 Crossover satu titik (Single-point Crossover)
Crossover satu titik dan banyak titik biasanya digunakan untuk
representasi kromosom dalam biner. Pada crossover satu titik, posisi
crossover k (k=1,2,…,N-1) dengan N sebagai panjang kromosom
diseleksi secara random. Variabel-variabel ditukar antara kromosom
pada titik tersebut untuk menghasilkan anak. Pada gambar 2.16
diilustrasikan crossover satu titik.
2.7.2.2 Crossover banyak titik (Multi-point Crossover)
Pada crossover banyak titik, m posisi penyilangan ki (k=1,2,…., N-1; i=1,2,…,m) dengan N = panjang kromosom diseleksi secara
randomdan tidak diperbolehkan ada posisi yang sama, serta diurutkan
naik. Variabel-variabel ditukar antara kromosom pada titik tersebut
untuk menghasilkan anak. Pada gambar 2.17 diilustrasikan crossover dua
titik dan pada gambar 2.18 diilustrasikan crossover lebih dari dua titik.
Gambar 2.17 Ilustrasi Crossover dua titik
Gambar 2.18 Ilustrasi crossover lebih banyak titik
2.7.2.3 Crossover Seragam (uniform Crossover)
Pada penyilangan seragam, Setiap lokasi memiliki potensi
sebagai tempat penyilangan.Sebuah mask penyilangan dibuat sepanjang
panjang kromosom secara random yang menunjukan bit-bit dalam mask
yang mana induk akan mensupply anak dengan bit-bit yang ada.
Induk yang mana yang akan menyumbangkan bit ke anak yang
2.7.2.4 Crossover dengan permutasi (Permutation Crossover)
Dengan permutasi, kromosom-kromosom anak diperoleh dengan
cara memilih sub-barisan suatu tour dari satu induk dengan tetap
menjaga urutan dan posisis ejumlah kota yang mungkin terhadap induk
yang lainnya.
2.8 Mutasi
Operator berikutnya pada algoritma genetika adalah mutasi gen.
Operator ini berperan untuk menggantikan gen yang hilang dari populasi
akibat proses seleksi yang memungkinkan munculnya kembali gen yang
tidak muncul pada inisialisasi populasi.
Kromosom anak dimutasi dengan menambahkan nilai random
yang sangat kecil (ukuran langkah mutasi), dengan probabilitas yang
rendah. Peluang mutasi (Pm) didefinisikan sebagai persentasi dari jumlah total gen pada populasi yang mengalami mutasi. Peluang mutasi
mengendalikan banyaknya gen baru yang akan dimunculkan untuk
dievaluasi. Jika peluang mutasi terlalu kecil, banyak gen yang mungkin
berguna tidak pernah dievalusi. Tetapi bila peluang mutasi ini terlalu
besar, maka akan terlalu banyak gangguan acak, sehingga anak akan
kehilangan kemiripan dari induknya, dan juga algoritma kehilangan
kemampuan untuk belajar dari history pencarian.
Ada beberapa pendapat mengenai laju mutasi ini. Ada yang
berpendapat bahwa laju mutasi sebesar 1/n akan memberikan hasil yang
cukup baik. Ada juga yang beranggapan bahwa laju mutasi tidak
tergantung pada ukuran populasinya. Kromosom hasil mutasi harus
diperiksa apakah masih berada pada domain solusi, dan bila perlu bias
Gambar 2.19 Diagram alir proses mutasi
Proses diatas menggambarkan cara mudah untuk melakukan
mutasi. Proses mutasi yang dilakukan tidak harus seperti pada proses
tersebut. Proses yang lain bias dengan melakukan mutasi pada gen
sebanyak probabilitas mutasi dikalikan jumlah gen, dimana posisi gen
yang akan dilakukan mutasi dipilih secara acak.
2.8.1 Mutasi Bilangan Real
Pada mutasi bilangan real, ukuran langkah mutasi biasanya
sangat sulit ditentukan. Ukuran yang paling kecil biasanya sering
mengalami kesuksesan, namun adakalanya ukuran yang lebih besar akan
berjalan lebih cepat.
Operator mutasi untuk bilangan real dapat ditetapkan sebagai:
- variabel yang dimutasi = variable ± range * delta; ( + atau –
memiliki probabilitas yang sama).
- range = 0,5 * domain variable (interval pencarian)
2.8.2 Mutasi Bilangan biner
Cara sederhana untuk mendapatkan mutasi biner adalah dengan
mengganti satu atau beberapa nilai gen dari kromosom.
Langkah-langkah mutasi adalah:
1. Hitung jumlah gen pada populasi (panjang kromosom dikalikan
dengan ukuran populasi).
2. Pilih secara acak gen yang akan dimutasi.
3. Tentukan kromosom dari gen yang terpilih untuk dimutasi.
4. Ganti nilai gen (0 ke 1, atau 1 ke 0) dari kromosom yang akan
dimutasi tersebut.
2.8.3 Mutasi kromosom permutasi
Gambar 2.20 Proses dan hasil mutasi
2.9 Siklus Algoritma Genetika
Siklus dari Algoritma genetika pertama kali diperkenalkan oleh
David Goldberg, dimana gambaran siklus tersebut dapat dilihat pada
gambar 2.21.
Siklus ini kemudian diperbaiki oleh beberapa ilmuwan yang
mengembangkan Algoritma genetika, yaitu Zbigniew Michalewicz
dengan menambahkan operator elitism dan membalik proses seleksi
setelah proses reproduksi.
Gambar 2.22 Siklus Algoritma genetika Zbigniew Michalewicz hasil perbaikan dari
siklus algoritma genetika yang dikenalkan oleh David Goldberg
2.10 Algoritma Genetika Sederhana
Misalkan P(generasi) adalah populasi dari satu generasi, maka
secara sederhana algoritma genetika terdiri dari beberapa
langkah-langkah berikut:
1. Generasi=0 (generasi awal).
2. Inisialisasi populasi awal, P(generasi), secara acak.
3. Evaluasi nilai fitness pada setiapindividu dalam P(generasi).
4. Selanjutnya dilakukan langkah-langkah berikut hinggan mencapai
maksimum generasi:
a. generasi = generasi + 1 (tambah generasi).
b. seleksi populasi tersebut untuk mendapatkan kandidat induk.
c. Lakukan crossover pada P’(generasi).
d. Lakukan mutasi pada P’(generasi)
e. Lakukan evaluasi fitness setiap individu pada P’(generasi).
2.10.1 Metode Seleksi Dengan Roda Roulette
Seperti telah dijelaskan sebelumnya bahwa seleksi induk pada
algoritma genetika sederhana ini menggunakan metode seleksi roda
roulette karena metode seleksi inilah yang paling banyak digunakan.
Seleksi ini bertujuan untuk memberikan kesempatan reproduksi yang
lebih besar bagi anggota populasi yang memiliki fitness tinggi untuk
melakukan reproduksi.
Algoritma genetika roda roulette:
- Hitng total fitness (F):
Total fitness = Ʃ Fk ; k = 1,2,… popsize - Hitung fitness relatif tiap individu:
Pk = Fk /total fitnees - Hitung fitness komulatif:
q1 = p1
qk= qk-1 + pk; k=2,3,….. (popsize)
- pilih induk yang akan menjadi kandidat untuk di crossover
dengan cara:
- Bangkitkan nilai random r.
Jika qk = r dan qk+1 > r, maka pilih kromosom ke (k+1) sebagai kandidat induk.
2.10.2 Crossover (penyilangan)
Crossover (penyilangan) dilakukan atas 2 kromosom untuk
menghasilkan kromosom anak. Kromosom anak yang terbentuk akan
mearisi sebagian besar sifat krimosom induknya.metode yg sering
digunakan pada algoritma genetika sederhana ini adalah crossover satu
titik dan crossover dua titik. Pada metode ini,kita pilih sembarang
bilangan secara acak untuk menentukan posisi persilangan, kemudian
kita tukarkan bagian kanan titik potong dari kedua induk kromosom
tersebut untuk menghasilkan kromosom anak.
Apabila posisi titik potong yang terpilih secara acak adalah 3, maka
kromosom anak yang terbentuk adalah:
Pada crossover ada satu parameter yang sangat penting yaitu
peluang crossover (Pc). Peluang crossover menunjukkan rasio anak yang dihasilkan dalam setiap generasi dengan ukuran populasi. Misalkam
ukuran populasi (popsize=100), sedangkan peluang crossover (Pc = 0,25),berarti bahwa diharapkan ada 25 kromosom dari 100 kromosom
yang semula pada populasi tersebut akan mengalami crossover.
2.10.3 Mutasi
Mutasi yang digunakan pada algoritma genetika sederhana
dengan kromosom biner seperti dijelaskan sebelumnya, pada dasarnya
akan mengubah secara acak nilai suatu bit pada posisi tertentu. Kemudian
kita mengganti bit 1 dengan bit 0, atau sebaliknya mengganti bit 0 dengan
bit 1. Pada mutasi ini sangat dimungkinkan munculnya kromosom baru
yang semula belum muncul dalam populasi awal.
Misalkan :
terkena mutasi pada gen ke 5, di peroleh:
Pada mutasi ada satu parameter yang sangat penting yaitu
peluang crossover (pm). peluang mutasi menunjukkan presentasi jumlah total gen pada populasi yang akan mengalami mutasi. Untuk melakukan
mutasi, terlebih dahulu kita harus menghitung jumlah total gen pada
populasi tersebut. Kemudian bangkitkan bilangan random yang
Secara umum, diagram alir algoritma genetika sederhana seperti
terlihat pada gambar 2.23.
Gambar 2.23 Diagram alir algoritma genetika sederhana
2.10 Prosedur Algoritma Genetika
Untuk menggunakan Algoritma genetika, perlu dilakukan
prosedur sebagai berikut:
1. Menetapkan parameter optimasi, jumlah parameter optimasi, dan
batas dari parameter optimasi
2. Menetapkan fungsi optimasi atau fungsi objektif
3. Menetapkan parameter algoritma genetika.
4. Membangkitkan populasi awal, mengkodekan, nilai real.
5. Mendefinisikan nilai fitness, yang merupakan ukuran baik tidaknya
sebuah individu atau baik tidaknya solusi yang didapatkan.
6. Menentukan proses pembangkitan populasi awal. Hal ini biasanya
dilakukandengan menggunakan pembangkitan acak seperti
random-walk.
7. Menentukan proses seleksi yang akan digunakan.
8. Menentukan proses pindah silang (crossover) dan mutasi gen yang
akan digunakan.
2.10.1 Menetapkan parameter optimasi
Menetapkan parameter optimasi, jumlah parameter optimasi, dan
Contoh:
2.10.2 Menetapkan fungsi optimasi atau fungsi objektif
Fungsi objektif boleh menggunakan fungsi yang sudah ada, boleh
juga dibuat sendiri. Sebaiknya pahami terlebih dahulu permasalahan kita,
barulah pilih fungsi objektif yang cocok. Ada dua bentuk fungsi objektif,
yaitu fungsi linear, dan fungsi nonlinear.
Fungsi linear biasanya digunakan pada masalah yang tidak
terkendala atau unconstraint. Karena tidak terkendala, solusi yang
dihasilkan ada banyak titik sehingga kurang akurat. Sedangkan fungsi
nonlinear, biasanya digunakan pada masalah yang terkendala atau
constraint. Karena memiliki kendala, solusi yang dihasilkan lebih sedikit
sehingga lebih akurat. Beberapa fungsi objektif linear yang sudah ada
dan sering digunakan untuk optimasi adalah:

![Gambar 2.6 Bentuk Pahat Sekrap [11]](https://thumb-ap.123doks.com/thumbv2/123dok/71056.7143/34.595.267.373.597.720/gambar-bentuk-pahat-sekrap.webp)