Design And Analysis Of Robot Gripper For 10 Kg Payload.
Teks penuh
Gambar
Dokumen terkait
2.2 Material Handling Equipment – Automated Guided Vehicle. In the early 1950s, the material handling industry was still growing due to
[r]
Robot is a virtual or mechanical artificial agent. In practice, it is usually an electro- mechanical machine which is guided by computer or electronic programming, and robot
a) Robots can be substituted for humans in hazardous or uncomfortable work environments. b) A robot performs its work cycle with a consistency and repeatability that
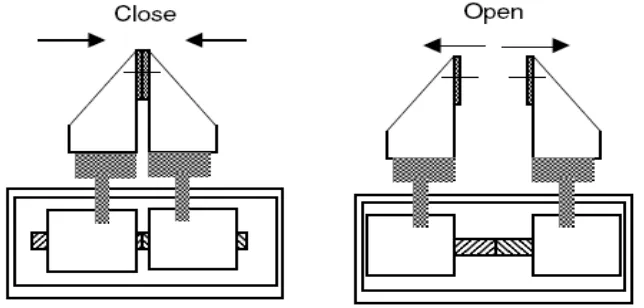
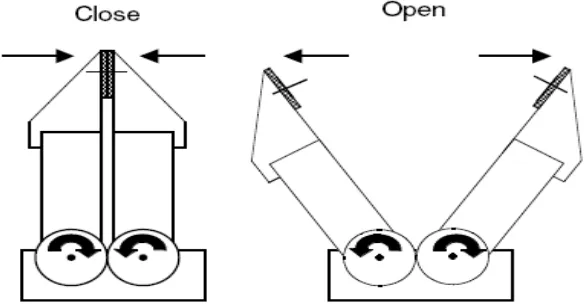
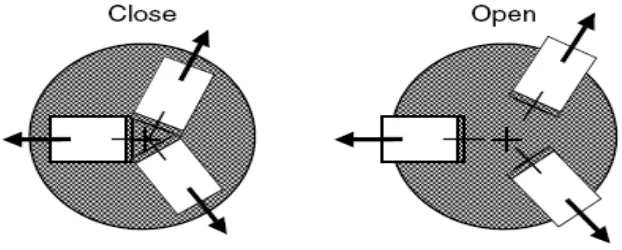
A conventional industrial robot is provided, at the extremity of the arm or the wrist thereof, with a robot hand which is controlled by a robot control
a) To determine the safe lifting limit regarding to manual materials handling activities. An observation was conducted to determine the safe lifting limits among the workers
"On the mechanical design of the Berkeley Lower Extremity Exoskeleton BLEEX", 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2005 Publication Dalei Pan,
8 2 POSITION SIMULATION TIME CONVEYER SPEED = 0.1M/S WITHOUT KALMAN FILTER End Effector X axis End Effector Y axis Actual Marker X axis Actual Marker Y axis Jurnal Kejuruteraan 344
